1. Introduction
Recently, the maintenance of aging facilities in Europe and the United States has become an urgent issue, as their disintegration causes financial damage and life loss [
1]. Structural maintenance is becoming important in South Korea as well, because the rate of facilities that have been used for 30 years or more (10.3% in 2017) is predicted to increase to 44.4% by 2037. The above example shows that the importance of structural maintenance as a result of the aging of facilities is increasing worldwide [
2]. Concrete fractures, which are a criterion for structural maintenance, occur due to various factors, including materials, construction, environment, and structural and external forces. Depending on the composition and impact of these factors, the durability of structures may decline, faults in structures may occur, and reinforcing rods may corrode. Therefore, assessing the state of concrete cracks is critical to the lifespan of the structure [
3,
4].
Repair and reinforcement strategies depend on the crack width; thus, a quantitative assessment is required to establish an economic and efficient maintenance plan [
5]. An existing method of examining cracks involves a visual inspection and assessment of cracks through measurement tools (crack scale). However, locations that are difficult to access are inspected on the basis of the examiner’s experience, and subjective assessments may lack reliability. Furthermore, the method is unsafe because there is a risk of fall during the inspection [
6].
Therefore, unmanned aerial vehicle (UAV)-based external inspection of structures can be performed to improve the safety of structural inspections. Moreover, several studies have objectively inspected cracks by analyzing images [
7,
8]. UAV-based inspections can reduce the safety risks of direct human-based examinations, and the inspection efficiency is higher than that of human-based examinations [
9,
10]. A deep learning object detection algorithm for detecting and analyzing the cracks in images was demonstrated to be more objective than the existing inspection method [
11,
12]. The study used an artificial intelligence method, which was previously trained with crack images, and had learned the features of cracks within images, in order to analyze collected crack images. The application of deep learning and quantitative training data reportedly increased the reliability of the inspection. However, this method of crack detection relies on the image quality, which depends on the shooting conditions (e.g., luminous intensity and environment). Therefore, further research on improving the crack detection by increasing the image quality has been conducted [
13]. A high-resolution algorithm that uses images with clear object definitions as training data to increase the resolution of the images was applied. Consequently, the rate of recognition increased, which increased the quantification reliability of the crack area. A study on the quantification of the crack width was conducted to analyze the crack size [
14]. As a method of quantifying the crack within the image, the image resolution of the captured area is measured through the geometrical relationship between the shooting distance and camera performance [
15,
16]. This method segments the image into pixels to count the pixels of the crack width area, which is an effective, noncontact quantification of the crack size. Analyzing the pixels was considered to stabilize the reliability of the crack assessment through objective numerical analysis. However, pixel count accuracy decreases with an increase in the image area; deviations from the actual crack width may occur. Therefore, the error value for pixels including the crack and wall was analyzed using a formula that uses the color values of the image. The results showed a reduced range of error for the crack width measurement while quantifying the crack [
17]. Thus, the crack width can be effectively measured. Nonetheless, the pixel number that includes the crack width within the image must be five or above for a low error rate. For this to occur, shooting at a close range is required.
Additionally, noncontact crack monitoring has been advanced by generating a 3D model through image measurement [
18]. Based on a 3D model that copied the actual object shape based on overlapped image patterns, an inspector could easily identify the locations and sizes of cracks. In addition, the area of a crack could be easily measured through image detection and damage assessment from the collected images. However, studies that quantitatively assess cracks encounter difficulties when assessing small cracks. Images taken by fixed cameras close to the cracks are of high definition, but UAVs maintaining a flight distance for efficient filming cannot generate the resolution attained by fixed cameras. Low-quality images are assessed to have a greater crack size than the actual object, hence using them for the quantitative assessment of cracks is difficult.
Other fields of research applied high-resolution algorithms to improve the degraded image quality [
19,
20]. The high-quality algorithm has been applied in the fields of medicine and recognition, and has been used to enhance the image resolution in cases where a clear object extraction is not possible due to camera performance and environmental conditions [
21,
22]. In the field of structural inspection, image improvement studies have also advanced through applying the high-resolution algorithm [
23]. These studies have successfully increased the detection performance for crack objects. Additionally, a comparison of the number of image crack pixels and the number of pixels obtained after application of the high-resolution algorithm showed a higher recognition rate after using the algorithm than with the original image. However, no research has been performed on the measurement of an actual crack width based on pixel count in the crack images. This study uses the pixel size of high-resolution images to measure the crack width, and compares it with the actual crack width for evaluation. Furthermore, the use of the very deep super-resolution (VDSR) algorithm for measuring the width of the crack images collected by UAVs at a safe flight distance is presented. The crack area pixels in high-resolution images after transformation are compared with the actual crack width. Finally, the results and improvement prospects are discussed.
2. Methods
To express the information of the image area, the captured area was segmented into pixels based on the camera performance. The information of the segmented area was represented as quantified RGB values. The quality of the pixel value increases as the actual area included in one pixel value decreases. The boundary between the object and background becomes blurry in low-quality images. Therefore, images that could include as many pixels as possible within the 0.1–0.4 mm crack sizes that occur in structures must be collected for accurate detection. However, images collected by UAVs, which must maintain a safe distance, cannot include the crack width within a pixel. Currently, the number of pixels that can be included in the crack width is low, owing to the performance of the cameras attached to UAVs. Therefore, the object detection analysis has limitations. In this study, the image shot from a safe flight distance was defined as having low resolution (LR). By contrast, an image was defined as high resolution (HR) when it included three or more pixels for the crack width. Finally, an image resolution (SR) in which an LR image is generated with high resolution was defined. The procedure of transforming an LR image into an SR image to compare the pixel count of the crack width is shown in
Figure 1.
2.1. Step 1: Very Deep Super-Resolution (VDSR)
VDSR architecture is an algorithm that learns the relationship between LR and HR images. It can maintain a suitable convergence speed and create a deeper network. Its structure comprises 20 layers, and the image data are segmented into YCbCr channels to use Y channel images as network training data. YCbCr is a color space used in an imaging system, wherein Y represents luminance, and Cb and Cr represent color difference components. Mean squared error loss is used for training to reduce the difference between the Y channel of the HR image, and the image generated by adding the LR image reconstructed as an interpolated LR image to the Y channel of the interpolated LR image after passing the network. Therefore, the VDSR output naturally becomes a residual image [
24].
In this study, as mentioned above, an image (HR) containing three or more pixels of crack width was reconstructed into LR images and used as learning data. The Y channel separated LR images into Y, Cb, and Cr channels. Prior to separation, learning was advanced to generate SR images by adding channels of RGB and Y channels of LR images, and to reduce differences compared to Y channels of HR images. To evaluate the performance of the learned algorithm, we compared the HR image with the reconstructed SR image. Therefore, we examined how similar an image containing actual information was reconstructed. As a result, the higher the reconstruction quality of SR images, the better the performance of the algorithm.
To assess the quality of the VDSR-transformed image, peak signal-to-noise ratio (PSNR) and structural similarity index map (SSIM) were used. The transformed image through the trained VDSR algorithm was compared with the previously defined LR image to assess the similarity between the two images [
25]. When used to assess the loss of image resolution, PSNR showed higher value at a lower loss. The loss data of an image were obtained via the mean squared error (MSE) value. Here, the error referred to the difference between the value predicted by the algorithm and the actual value. Consequently, the MSE value decreased as the algorithm prediction approached the actual value. Additionally, a lower MSE value could indicate a higher PSNR value. SSIM assessed the quality in terms of the brightness, contrast, and structure of an image. If the transformed image was identical to the original, the SSIM had a value of 1. The formulas for MSE, PSNR, and SSIM are shown below.
In Equation (1),
represents the image transformed by the VDSR algorithm, and
represents the original image.
represents the image resolution, and MSE is determined by the pixel difference between the two images.
In Equation (2),
MSE is applied as the denominator. An
MSE value of 0 indicates no loss, and
PSNR cannot be defined. The range of
P as the maximum pixel is 0–255.
In Equation (3), and represent the average values of image and image , respectively. and represent the variance of images and respectively; represents the covariance of images and .
Equations (1) and (2) analyze the image data quality, and determine the loss value between two images to show their degree of similarity. It does not represent a difference in quality detected by humans; thus, good quality values may not indicate high visual quality [
26]. Unlike PSNR, SSIM (Equation (3)) assesses the difference in quality from the perspective of human vision, and its quality assessment accounts for the luminance, contrast, and structure. A higher value indicates a higher-quality result from the human perspective [
27]. The two abovementioned assessment methods are generally used for evaluating the training performance of the VDSR algorithm.
2.2. Step 2: Crack Pixel Estimation through Image Binarization
Image binarization was used to differentiate the background and object [
28]. When the crack width was measured based on image binarization, the RGB value was transformed into greyscale for effective computation as shown in
Figure 2. Different RGB values express different colors. Significant computation is required for acquiring the average value for distinguishing black and white. Therefore, greyscale images that transform the RGB values into identical values were used to facilitate the computation. Later, a threshold value was determined using the average and standard deviation to classify each pixel into black or white. Greyscale includes the identical RGB values, and sets the standard from a range of 0–255. The boundary of the crack was extracted by indicating values greater than the standard set as white and lower than the black standard. Since the images were transformed into high-resolution images based on the RGB values of the original image, the experimental data were transformed based on the threshold including the crack width during binarization of the original image.
2.3. Step 3: Image Resolution Measurement
The actual size of one pixel was determined through the geometrical relationship for images collected from cameras. The focal distance, sensor size, and resolution of the camera varied according to the manufacturer, and the necessary information could be extracted from the image file format. To set a certain shooting distance, masking tape was used. A fixed camera was used for accurate shooting at a 3-meter distance from the object to collect experimental data. The camera had a sensor size of 7.76 × 5.81 mm, focal distance of 5.7 mm, and a resolution of 4032 × 3024.
In Equation (4), which presents the actual size included in one pixel, FL indicates the focal distance of the camera, and SS indicates the sensor size. L is the shooting distance, and R is the resolution of the image.
4. Conclusions
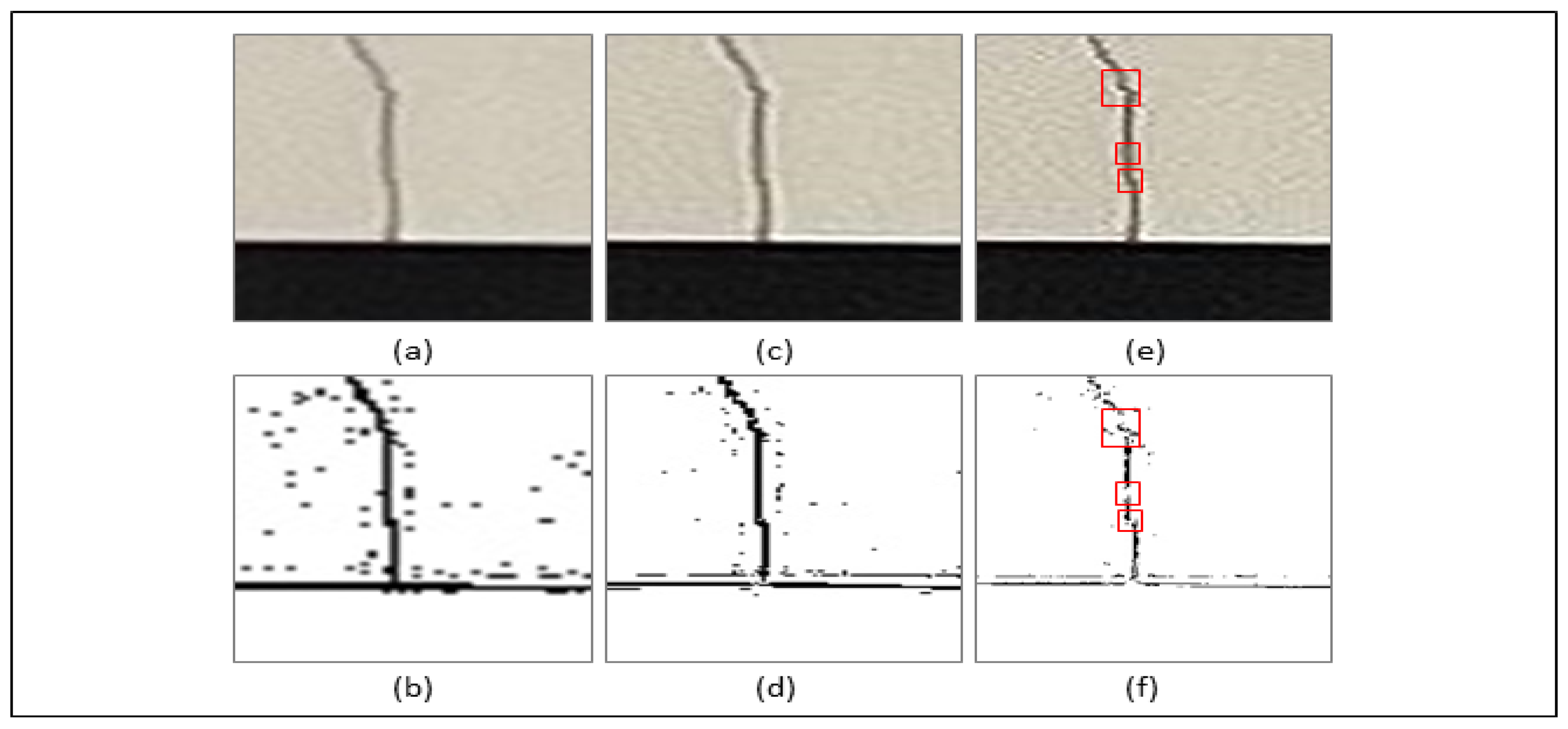
In order to solve the difficulty of measuring crack width due to low resolution in images collected at safe intervals for crack width inspection with unmanned aircraft, this study proposed a high-resolution image-based crack width measurement method using the VDSR algorithm. The purpose was to analyze how crack widths could be measured by increasing the resolution corresponding to the crack area of an image photographed at a safe interval distance. First, VDSR algorithms were applied to reconstruct LR images into SRs. After that, in order to measure the crack width pixels of the reconstructed image, the crack width and the background area were divided on the basis of image binarization. Finally, the crack width was measured based on the actual size of the pixel region through geometric relationships, and it was confirmed that the measurement was similar to the actual crack width.
The quality of reconstructed images in high resolution was examined through the naked eye, and through PSNR and SSIM. In order to evaluate the performance of the VDSR algorithms refined from the training set, the HR images identical to the learning data were converted into LR images (1/2, 1/4). Then, the LR images were reconstructed into SR images (SR x2, SR x4) utilizing the VDSR algorithm to evaluate the quality between the SR and HR images. The evaluation results showed that the value of SR x2 showed the highest similarity, and in the case of SR x4, it was relatively lower than the value of SR x2. When evaluating an image with the naked eye, it was confirmed that both values of SR x2 and SR x4 were reconstructed more clearly than before when reconstructed with the LR image in comparison to the SR image.
An SR image using the VDSL algorithm was reconstructed based on an image (LR) photographed 3 m away from a position where actual measurements of crack width could be obtained. Subsequently, binarization was applied to distinguish the background from the crack shape, and it was confirmed that all three images, LR, SR x2, and SR x4, correctly extracted the crack shape. Afterwards, the size of one pixel was calculated through the geometric relationship between camera performance and photographic area, and three values were derived: 0.96 mm2, 1.01 mm2, and 0.84 mm2. After that, the pixel value was adjusted to match the reconstructed image magnification to measure the crack width. As a result, when the high resolution was applied, it was confirmed that it was derived similarly to the measured crack width value. However, the two areas of the crack width and the wall surface were calculated together using pixels of a fixed size, and there was a limit to the measurement, showing a high error rate.
The above limitations could be addressed through additional research that would measure the crack width by transforming HR images to super high-resolution images, and by applying various methods to include more pixels corresponding to the crack width. Moreover, the crack width can be quantitatively measured by applying additional methods that measure the crack width.
The VDSR algorithm-based crack width measurement method showed significant results. However, additional measures are required to resolve problems in quantitatively assessing the crack width. It is considered necessary to search for methods of analyzing images shot at a safe UAV distance by applying image quality improvement methods, and using various methods of crack width measurement.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}