
Monitoring of Soil Salinization in the Keriya Oasis Based on Deep Learning with PALSAR-2 and Landsat-8 Datasets


Abstract
:1. Introduction
2. Materials and Methods
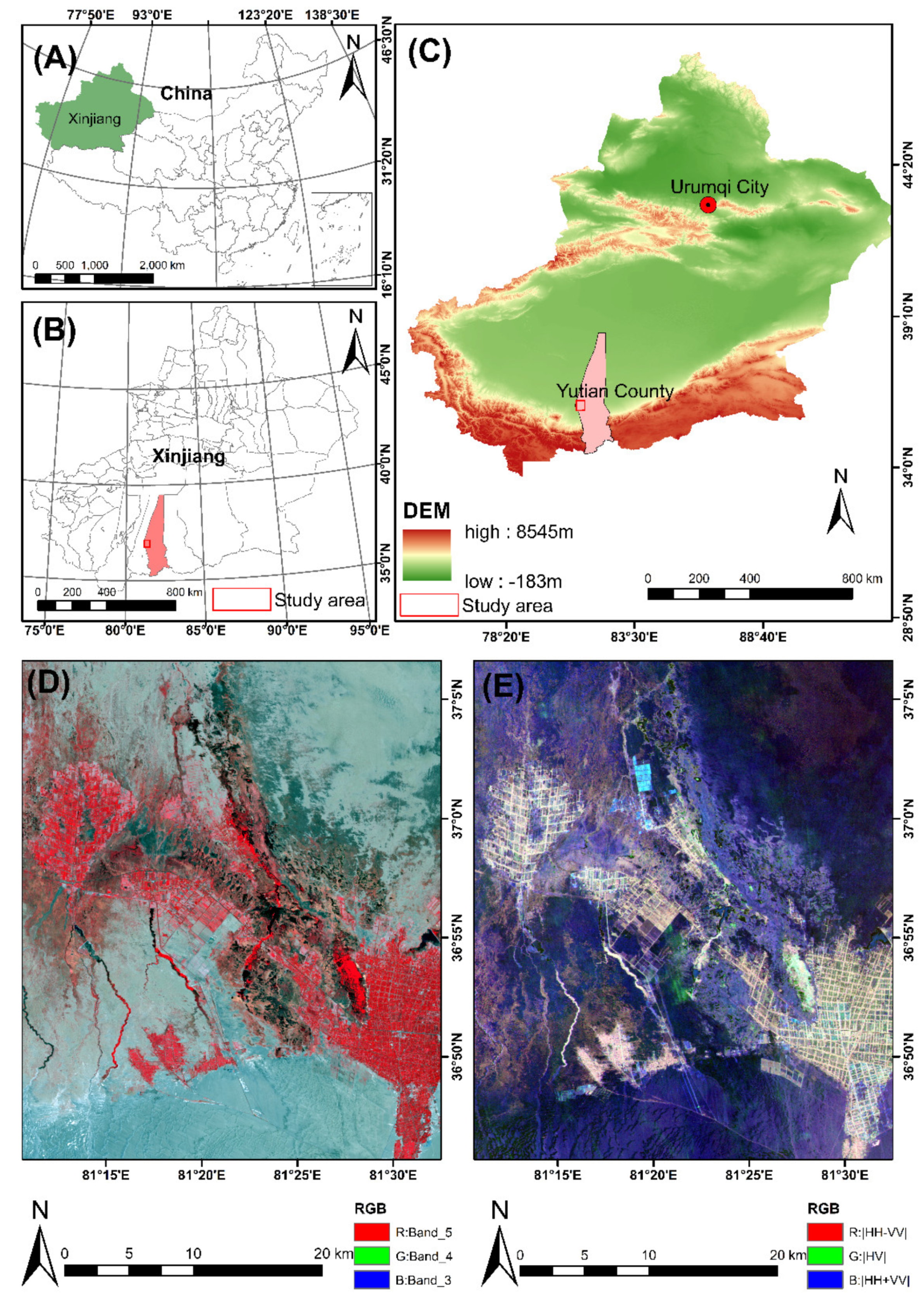
2.1. Study Area
2.2. Data
2.2.1. Remote Sensing Data
2.2.2. Field Data
2.3. Methods
2.3.1. Polarimetric Decomposition
2.3.2. Calculate the NDVI, SI and RVI
2.3.3. Machine Learning Algorithms Used
Feature Selection from PALSAR-2 Imagery
Support Vector Machine (SVM) Classification
Random Forest Classification
2.3.4. DL Algorithms
2.3.5. Accuracy Assessment
3. Results
3.1. Polarimetric Decomposition of Fully PolSAR Data and Feature Selection
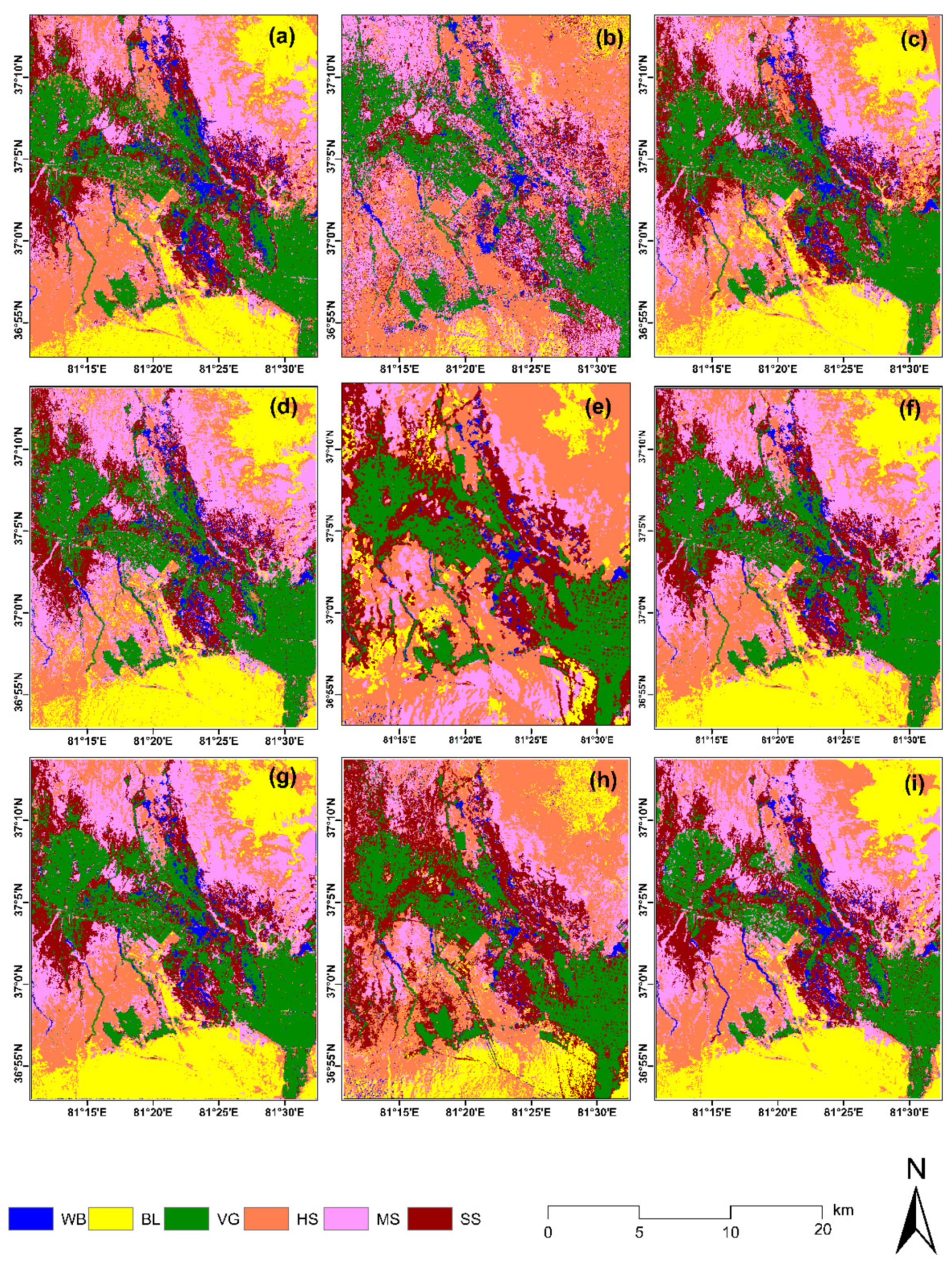
3.2. Classification Results
3.3. Classification Accuracy
4. Discussion
4.1. Comparison of Different Classification Methods
4.2. Polarimetric Decomposition Influence on Classification Results
4.3. Data Source Influence on Classification Results
4.4. Distribution Characteristics of Salinization in Study Area
5. Conclusions
- (1)
- A variety of target polarization decomposition methods, including the Pauli, Freeman, Freeman_Durden, Cloude, Yamaguchi, VanZyl, Sinclair, and H/A/Alpha methods, are used to polarize the PALSAR-2 data. Additionally, the eight best feature components, namely , , Freeman Durden_vol_g, Pauli_b, Pauli_r, Sinclair_g, VanZyl_vol_g, and RVI, are selected by the random forest (RF) method to extract the information on soil salinization.
- (2)
- The OLI data are used to extract the normalized vegetation index (NDVI) and salinity index (SI), which are then combined with the optimal feature subsets of the PALSAR-2 image to form an integrated image to extract salinization information.
- (3)
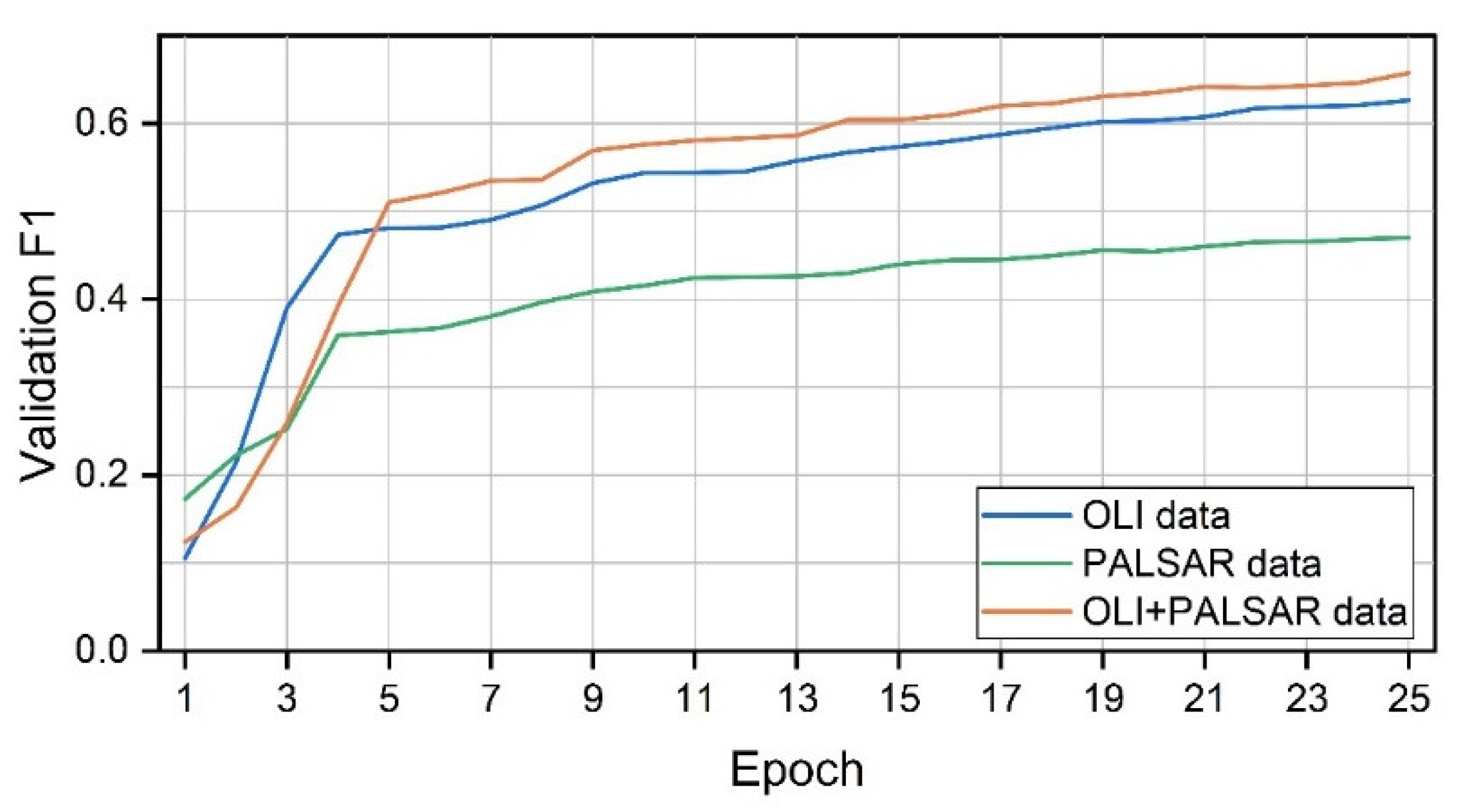
- Classification methods, such as a support vector machine (SVM), RF, and DL, are used to extract salinization information from different data types, including the OLI, PALSAR-2, and OLI+PALSAR-2 data. The results show that the OLI+PALSAR-2 image classification result of the DL classification was relatively good, having the highest overall accuracy rate of 91.86% and a kappa coefficient of 0.90.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- El Harti, A.; Lhissou, R.; Chokmani, K.; Ouzemou, J.; Hassouna, M.; Bachaoui, E.M.; El Ghmari, A. Spatiotemporal Monitoring of Soil Salinization in Irrigated Tadla Plain (Morocco) Using Satellite Spectral Indices. Int. J. Appl. Earth Obs. Geoinf. 2016, 50, 64–73. [Google Scholar] [CrossRef]
- Akça, E.; Aydin, M.; Kapur, S.; Kume, T.; Nagano, T.; Watanabe, T.; Çilek, A.; Zorlu, K. Long-term monitoring of soil salinity in a semi-arid environment of Turkey. Catena 2020, 193, 104614. [Google Scholar] [CrossRef]
- Naimi, S.; Ayoubi, S.; Zeraatpisheh, M.; Dematte, J.A.M. Ground Observations and Environmental Covariates Integration for Mapping of Soil Salinity: A Machine Learning-Based Approach. Remote Sens. 2021, 13, 4825. [Google Scholar] [CrossRef]
- Yu, P.Y. Effects of Potassium Ion on Physiologicalproperty of Malus Zumi Seedling under Salt. Master’s Thesis, Tianjin Agricultural University, Tianjin, China, 2014. (In Chinese). [Google Scholar]
- Bell, D.; Menges, C.; Ahmad, W.; van Zyl, J.J. The application of dielectric retrieval algorithms for mapping soil salinity in a tropical coastal environment using airborne polarimetric SAR. Remote Sens. Environ. 2001, 75, 375–384. [Google Scholar] [CrossRef]
- Li, J.G.; Pu, L.J.; Zhu, M.; Zhang, R.S. The present situation and hot issues in the salt-affected soil research. Acta Geogr. Sin. 2012, 67, 1233–1245. (In Chinese) [Google Scholar]
- Singh, A.; Meena, G.K.; Kumar, S.; Gaurav, K. Evaluation of the Penetration Depth of L-and S-Band (NISAR mission) Microwave SAR Signals into Ground. In Proceedings of the 2019 URSI Asia-Pacific Radio Science Conference (AP-RASC), New Delhi, India, 9–15 March 2019; p. 1. [Google Scholar]
- Jakob Van Zyl, Y.K. Synthetic Aperture Radar Polarimetry; John Wiley & Sons: Hoboken, NJ, USA, 2011; Volume 2. [Google Scholar]
- Fan, Z.L.; Xu, Q.Q.; Li, H.P.; Zhang, P.; Zhou, S.B.; Lu, L. Rational groundwater exploitation and utilization, an important approach of improving Salinized Farmland in Xinjiang. Arid Zone Res. 2011, 28, 737–743. (In Chinese) [Google Scholar]
- Muhetaer, N.; Nurmemet, I.; Abulaiti, A.; Xiao, S.; Zhao, J. A Quantifying Approach to Soil Salinity Based on a Radar Feature Space Model Using ALOS PALSAR-2 Data. Remote Sens. 2022, 14, 363. [Google Scholar] [CrossRef]
- Allbed, A.; Kumar, L. Soil salinity mapping and monitoring in arid and semi-arid regions using remote sensing technology: A review. Adv. Remote Sens. 2013, 2, 373–385. [Google Scholar] [CrossRef] [Green Version]
- Andrade, G.R.P.; Furquim, S.A.C.; do Nascimento, T.T.V.; Brito, A.C.; Camargo, G.R.; de Souza, G.C. Transformation of clay minerals in salt-affected soils, Pantanal wetland, Brazil. Geoderma 2020, 371, 114380. [Google Scholar] [CrossRef]
- Qi, Z.; Yeh, A.G.O.; Li, X.; Lin, Z. A novel algorithm for land use and land cover classification using RADARSAT–2 polarimetric SAR data. Remote Sens. Environ. 2012, 118, 21–39. [Google Scholar] [CrossRef]
- Bindlish, R.; Barros, A.P. Parameterization of vegetation backscatter in radar-based, soil moisture estimation. Remote Sens. Environ. 2001, 76, 130–137. [Google Scholar] [CrossRef]
- Maghsoudi, Y.; Collins, M.J.; Leckie, D.G. Radarsat–2 polarimetric SAR data for boreal forest classification using SVM and a wrapper feature selector. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 1531–1538. [Google Scholar] [CrossRef]
- Del Frate, F.; Ferrazzoli, P.; Schiavon, G. Retrieving soil moisture and agricultural variables by microwave radiometry using neural networks. Remote Sens. Environ. 2003, 84, 174–183. [Google Scholar] [CrossRef]
- Serbin, G.; Or, D. Ground-penetrating radar measurement of soil water content dynamics using a suspended horn antenna. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1695–1705. [Google Scholar] [CrossRef]
- Rhoades, J.D.; Chanduvi, F. Soil Salinity Assessment: Methods and Interpretation of Electrical Conductivity Measurements; Food & Agriculture Organazition: Rome, Italy, 1999. [Google Scholar]
- Zhu, Z.; Woodcock, C.E.; Rogan, J.; Kellndorfer, J. Assessment of spectral, polarimetric, temporal, and spatial dimensions for urban and peri-urban land cover classification using Landsat and SAR data. Remote Sens. Environ. 2012, 117, 72–82. [Google Scholar] [CrossRef]
- Negra, T.; Ilyas, N.; Wang, Y.H.; Mukaddas, A. Soil Salinization Classification in Arid Area Based on H/A/α Decomposition Fully Polarized SAR Data. Jiangsu Agr. Sci. 2019, 47, 273–279. (In Chinese) [Google Scholar]
- Wang, Y.Y. Classification of Polarimetric SAR Images Based on Multilaver Network Model. Ph.D. Thesis, Wuhan University, Wuhan, China, 2015. (In Chinese). [Google Scholar]
- Qu, Y.C. Polarimetric Radarsat–2 Image Classification Based on Target Decomposition Theorems in Polarimetry. Master’s Thesis, Nanjing University, Nanjing, China, 2016. (In Chinese). [Google Scholar]
- Nurmemet, I.; Sagan, V.; Ding, J.L.; Halik, U.; Abliz, A.; Yakup, Z. A WFS-SVM model for soil salinity mapping in keriya oasis, northwestern china using polarimetric decomposition and fully PolSAR data. Remote Sens. 2018, 10, 598. [Google Scholar] [CrossRef] [Green Version]
- Weilei, D. The Research on Target Recognition Methods Based on Polarization Radar. Master’s Thesis, Harbin Engineering University, Harbin, China, 2013. [Google Scholar]
- Luo, C.; Feng, X.; Liu, C.; Zhang, Y.; Nilot, E.; Zhang, M.; Dong, Z.; Zhou, H. Full-polarimetric GPR for detecting ice fractures. In Proceedings of the 2018 17th International Conference on Ground Penetrating Radar (GPR), Rapperswil, Switzerland, 18–21 June 2018; pp. 1–4. [Google Scholar]
- Isak, G.; Nurmemet, I.; Duan, S.S. The Extraction of Saline Soil Information in Typical Oasis of Arid Area Using Fully Polarimetric Radarsat-2 data. China Rural. Water Hydropower 2018, 12, 13–19. [Google Scholar]
- Xiao, Y. Research on Object-Oriented Classification. Master’s Thesis, Jilin University, Changchun, China, 2017. (In Chinese). [Google Scholar]
- Aldabaa, A.A.A.; Weindorf, D.C.; Chakraborty, S.; Sharma, A.; Li, B. Combination of proximal and remote sensing methodsfor rapid soil salinity quantification. Geoderma 2015, 239-240, 34–46. [Google Scholar] [CrossRef] [Green Version]
- XIE, X.Q.; Yang, J.Z.; Deng, S.W. Identifying flue-cured tobacco in a typical cultivated area of Yuxi based on Sentinel-1 time series images. J. Agric. Resour. Environ. 2022, 41, 21–39. [Google Scholar]
- Taghadosi, M.M.; Hasanlou, M.; Eftekhari, K. Soil salinity mapping using dual-polarized SAR Sentinel-1 imagery. Int. J. Remote Sens. 2018, 40, 237–252. [Google Scholar] [CrossRef]
- Tan, M.; Pang, R.; Le, Q.V. Efficientdet: Scalable and Efficient Object Detection. Available online: https://openaccess.thecvf.com/content_CVPR_2020/papers/Tan_EfficientDet_Scalable_and_Efficient_Object_Detection_CVPR_2020_paper.pdf (accessed on 4 January 2022).
- Yan, X.; Cui, B.; Xu, Y.; Shi, P.; Wang, Z. A method of information protection for collaborative deep learning under gan model attack. IEEE/ACM Trans. Comput. Biol. Bioinform. 2019, 18, 871–881. [Google Scholar]
- Otter, D.W.; Medina, J.R.; Kalita, J.K. A survey of the usages of deep learning for natural language processing. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 604–624. [Google Scholar] [CrossRef] [Green Version]
- Gao, J.; Deng, B.; Qin, Y.; Wang, H.; Li, X. Enhanced radar imaging using a complex-valued convolutional neural network. IEEE Geosci. Remote Sens. Lett. 2019, 16, 35–39. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.; Wang, H.; Xu, F.; Jin, Y. Polarimetric SAR image classification using deep convolutional neural networks. IEEE Geosci. Remote Sens. Lett. 2017, 13, 1935–1939. [Google Scholar] [CrossRef]
- Jiang, T.; Cui, Z.; Zhou, Z.; Cao, Z. Data Augmentation with Gabor Filter in Deep Convolutional Neural Networks for Sar Target Recognition. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 689–692. [Google Scholar] [CrossRef]
- Zhang, C.; Sargent, I.; Pan, X.; Li, H.; Gardiner, A.; Hare, J.; Atkinson, P.M. An object-based convolutional neural network (OCNN) for urban land use classification. Remote Sens. Environ. 2018, 216, 57–70. [Google Scholar] [CrossRef] [Green Version]
- Ndikumana, E.; Minh, D.H.T.; Baghdadi, N.; Courault, D.; Hossard, L. Applying deep learning for agricultural classification using multitemporal SAR Sentinel-1 for Camargue, France. In Image and Signal Processing for Remote Sensing Xxiv; Bruzzone, L., Bovolu, F., Eds.; Spie-Int Soc Optical Engineering: Bellingham, WA, USA, 2018. [Google Scholar]
- Hou, B.; Kou, H.; Jiao, L. Classification of polarimetric sar images using multilayer autoencoders and superpixels. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 3072–3081. [Google Scholar] [CrossRef]
- Zhu, L.K.; Ma, X.S.; Wu, P.H.; Xu, J.G. Multiple classifiers based semi-supervised polarimetric SAR image classification method. Sensors 2021, 21, 3006. [Google Scholar] [CrossRef] [PubMed]
- Ghulam, A.; Qin, Q.; Zhu, L.; Abdrahman, P. Satellite remote sensing of groundwater: Quantitative modelling and uncertainty reduction using 6s atmospheric simulations. Int. J. Remote Sens. 2004, 25, 5509–5524. [Google Scholar] [CrossRef]
- Hao, X.; Chen, Y.; Li, W.; Guo, B.; Zhao, R. Hydraulic lift in Populus euphratica Oliv from the desert riparian vegetation of the Tarim River Basin. J. Arid Environ. 2010, 74, 905–911. [Google Scholar] [CrossRef]
- Yang, X. The oases along the Keriya River in the Taklamakan Desert, China, and their evolution since the end of the last glaciation. Environ. Geol. 2001, 41, 314–320. [Google Scholar]
- Dong, X.G.; Deng, M. Groundwater Resources in Xinjiang; Xinjiang Science and Technology Publishing House: Urumqi, China, 2009; pp. 8–9. (In Chinese) [Google Scholar]
- Zaytungul, Y.; Mamat, S.; Abdusalam, A.; Zhang, D. Soil salinity inversion in Yutian Oasis based on PALSAR radar data. Res. Sci. 2018, 40, 2110–2117. [Google Scholar]
- Rosenqvist, A.; Shimada, M.; Suzuki, S.; Ohgushi, F.; Tadono, T.; Watanabe, M.; Tsuzuku, K.; Watanabe, T.; Kamijo, S.; Aoki, E. Operational performance of the ALOS global systematic acquisition strategy and observation plans for ALOS–2 PALSAR–2. Remote Sens. Environ. 2014, 155, 3–12. [Google Scholar] [CrossRef]
- Natsuaki, R.; Nagai, H.; Motohka, T.; Ohki, M.; Watanabe, M.; Thapa, R.B.; Tadono, T.; Shimada, M.; Suzuki, S. SAR interferometry using ALOS–2 PALSAR–2 data for the Mw 7. 8 Gorkha, Nepal earthquake. Earth Planets Space 2016, 68, 15. [Google Scholar] [CrossRef] [Green Version]
- Suzuki, S.; Kankaku, Y.; Osawa, Y. Development Status of PALSAR–2 onboard ALOS–2. Technol. Rep. Ieice Sane 2011, 113, 1–4. [Google Scholar]
- Arikawa, Y.; Saruwatari, H.; Hatooka, Y.; Suzuki, S. ALOS–2 launch and early orbit operation result. Int. Geosci. Remote Sens. Symp. 2014, 2, 3406–3409. [Google Scholar]
- Lopes, A.; Touzi, R.; Nezry, E. Adaptive speckle filters and scene heterogeneity. IEEE Trans. Geosci. Remote Sens. 1990, 28, 992–1000. [Google Scholar] [CrossRef]
- Holecz, F.; Meier, E.; Piesbergen, J.; Nisch, D.; Moreira, J. Rigorous derivation of backscattering coefficient. IEEE Geosc. Remote Sens. Soc. Newsl. 1994, 92, 6–14. [Google Scholar]
- Sarmap, S.A. Synthetic Aperture Radar and SARscape: SAR Guidebook; Purasca: Caslano, Switzerland, 2009. [Google Scholar]
- Ulaby, F.T.; Dobson, M.C. Handbook of Radar Scattering Statistics for Terrain; Artech House: Norwood, MA, USA, 1989. [Google Scholar]
- Mashimbye, Z.E.; Cho, M.A.; Nell, J.P.; De Clercq, W.P.; Van Niekerk, A.; Turner, D.P. Model-Based Integrated Methods for Quantitative Estimation of Soil Salinity from Hyperspectral Remote Sensing Data: A Case Study of Selected South African Soils. Pedosphere 2012, 22, 640–649. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, Z.; Chen, J.; Chen, H.; Jin, J.; Han, J.; Wang, X.; Song, Z.; Wei, G. Estimating soil salinity with different fractional vegetation cover using remote sensing. Land Degrad. Develop. 2020, 32, 597–612. [Google Scholar] [CrossRef]
- Huynen, J.R. Phenomenological Theory of Radar Targets. Ph.D. Thesis, Technical University, Delft, The Netherlands, 1970. [Google Scholar]
- An, W.T.; Cui, Y.; Yang, J. Three-Component Model-Based Decomposition for Polarimetric SAR Data. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2732–2739. [Google Scholar]
- Cloude, S.R. Groupe theory and polarization algebra. Optic 1986, 75, 26–36. [Google Scholar]
- Huang, X.D. The Inconsistency of Polarimetric Sar Model-Based Target Decomposition. Master’s Thesis, China University of Geoscience, Wuhan, China, 2013. [Google Scholar]
- He, M.; Li, Y.Z.; Wang, X.S.; Xiao, S.P.; Li, Z.J. A polarimetric calibration algorithm based on pauli-basis decomposition. J. Astronaut. 2011, 32, 2589–2595. [Google Scholar]
- Lee, J.S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; CRC Press: New York, NY, USA, 2009. [Google Scholar]
- Cloude, S.R. Target decomposition theorems in radar scattering. Electron. Lett. 1985, 21, 22–24. [Google Scholar] [CrossRef]
- Freeman, A. Fitting a two-component scattering model to polarimetric SAR data from forests. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2583–2592. [Google Scholar] [CrossRef]
- Cloude, S.R.; Pottier, E. An entropy based classification scheme for land applications of polarimetric SAR. IEEE Trans. Geosci. Remote Sens. 1997, 35, 68–78. [Google Scholar] [CrossRef]
- Freeman, A.; Durden, S.L. A three-component scattering model for polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 1998, 36, 963–973. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W.; Yin, F.; Chai, J.; Bai, X. The Effect of Send/Receive Dual Channel Parameters on Polarization Parameters Measurement. Chin. J. Electron. 2017, 26, 336–344. [Google Scholar] [CrossRef]
- Van Zyl, J.J. Application of Cloude’s target decomposition theorem to polarimetric imaging radar data. In Radar Polarimetry; International Society for Optics and Photonics: Bellingham, WA, USA, 1993; pp. 184–191. [Google Scholar]
- Yamaguchi, Y.; Moriyama, T.; Ishido, M.; Yamada, H. Four-component scattering model for polarimetric SAR image decomposition. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1699–1706. [Google Scholar] [CrossRef]
- Ersahin, K.; Cumming, I.G.; Ward, R.K. Segmentation and Classification of Polarimetric SAR Data Using Spectral Graph Partitioning. IEEE Trans. Geosci. Remote Sens. 2010, 48, 164–174. [Google Scholar] [CrossRef] [Green Version]
- Abuelgasim, A.; Ammad, R. Mapping soil salinity in arid and semi-arid regions using Landsat-8 OLI satellite data. Remote Sens. Appl. Soc. Environ. 2019, 13, 415–425. [Google Scholar] [CrossRef]
- Xie, Q.; Meng, Q.; Zhang, L.; Wang, C.; Sun, Y.; Sun, Z. A Soil Moisture Retrieval Method Based on Typical Polarization Decomposition Techniques for a Maize Field from Full-Polarization Radarsat-2 Data. Remote Sens. 2017, 9, 168. [Google Scholar] [CrossRef] [Green Version]
- He, C.; Xia, G.; Sun, H. SAR images classification method based on Dempster-Shafer theory and kernel estimate. J. Syst. Eng. Electron. 2007, 18, 210–216. [Google Scholar]
- Defries, R.S.; Townshend, J.R.G. NDVI-derived land cover classifications at a global scale. Int. J. Remote Sens. 1994, 15, 3567–3586. [Google Scholar] [CrossRef]
- Wang, F.; Chen, X.; Luo, G.; Ding, J.; Chen, X. Detecting soil salinity with arid fraction integrated index and salinity index in feature space using Landsat TM imagery. J. Arid Land 2013, 5, 340–353. [Google Scholar] [CrossRef] [Green Version]
- Xie, Q.; Lai, K.; Wang, J.; Lopez-Sanchez, J.M.; Shang, J.; Liao, C.; Zhu, J.; Fu, H.; Peng, X. Crop Monitoring and Classification Using Polarimetric RADARSAT-2 Time-Series Data Across Growing Season: A Case Study in Southwestern Ontario, Canada. Remote Sens. 2021, 13, 1394. [Google Scholar] [CrossRef]
- Pottier, E.; Ferro-Famil, L. PolSARPro V5.0: An ESA educational toolbox used for self-education in the field of POLSAR and POL-INSAR data analysis. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 7377–7380. [Google Scholar]
- Breiman, L. Bagging predictors. Mach. Learn. 1996, 24, 123–140. [Google Scholar] [CrossRef] [Green Version]
- Genuer, R.; Poggi, J.M. Variable selection using randomforest. Pattern Recognit. Lett. 2010, 31, 2225–2236. [Google Scholar] [CrossRef] [Green Version]
- Han, P.; Sun, D.D. Classification of Polarimetric SAR image with feature selection and deep learning. J. Signal Process. 2019, 35, 972–978. [Google Scholar]
- Vapnik, V.N. The Nature of Statistical Learning Theory; Springer: Berlin, Germany, 1995. [Google Scholar]
- Chang, C.C.; Lin, C.J. LIBSVM: A library for support vector machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 1–27. [Google Scholar] [CrossRef]
- Keerthi, S.S.; Lin, C.J. Asymptotic behaviors of support vector machines with Gaussian kernel. Neural Comput. 2003, 15, 1667–1689. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Ho, T. The random subspace method for constructing decision forests. IEEE Trans. Pattern Anal. 1998, 20, 832–844. [Google Scholar]
- Ibrahim, M. Reducing correlation of random forest based learning-to-rank algorithms using subsample size. Comput. Intell. 2019, 35, 774–798. [Google Scholar] [CrossRef]
- Friedman, J.; Hastie, T.; Tibshirani, R. The Elements of Statistical Learning; Springer Series in Statistics; Springer: New York, NY, USA, 2001. [Google Scholar]
- Liu, M.; Lang, R.L.; Cao, Y.B. Number of trees in random forest. Comput. Eng. Appl. 2015, 51, 126–131. (In Chinese) [Google Scholar]
- Zhang, L.P.; Zhang, L.F.; Du, B. Deep learning for remote sending data: A technical tutorial on the state of the art. IEEE Geosci. Remote Sens. Mag. 2016, 4, 22–40. (In Chinese) [Google Scholar] [CrossRef]
- Wang, J.; Zheng, T.; Lei, P.; Wei, S.M. Study on deep learning in radar. J. Radars 2018, 7, 395–411. (In Chinese) [Google Scholar]
- Pan, Z.X.; An, Q.Z.; Zhang, B.C. Progress of deep learning-based target recognition in radar images. Sci. Sin. Inform. 2019, 49, 1626–1639. (In Chinese) [Google Scholar]
- Tao, C.S. Reasearch of Polarimetric SAR Detection and Classification Based on Features in Rotation Domain and Deep CNN. Master’s Thesis, National University of Defense Technology, Changsha, China, 2017. (In Chinese). [Google Scholar]
- Hua, W.Q. Study on Polarimetric SAR Images Classification with Small Samples. Master’s Thesis, Xidian University, Xi’an, China, 2018. (In Chinese). [Google Scholar]
- Zhu, X.X.; Tuia, D.; Mou, L.C.; Xia, G.S.; Zhang, L.P.; Xu, F.; Fraundorfer, F. Deep learning in remote sensing: A comperehensive review and list of resources. IEEE Geosc. Remote Sens. Mag. 2017, 5, 8–36. [Google Scholar] [CrossRef] [Green Version]
- Deng, S.P.; Sun, S. Comparisions of polarimetric SAR image classifiers based on deep learning. Sci. Survey. Map. 2021, 46, 120–127. (In Chinese) [Google Scholar]
- Zhai, Y.K.; Ma, H.; Cao, H.; Deng, W.B.; Liu, J.; Zhang, Z.Y.; Guan, H.X.; Zhi, Y.H.; Wang, J.X.; Zhou, J.H. MF-SarNet: Effective CNN with data augmentation for SAR automatic target recognition. J. Eng. 2019, 2019, 5813–5818. [Google Scholar] [CrossRef]
- Li, Q.; Cai, W.; Wang, X.; Zhou, Y.; Feng, D.D.; Chen, M. Medical image classification with convolutional neural network. In Proceedings of the 2014 13th International Conference on Control Automation Robotics & Vision (ICARCV), Singapore, 10–12 December 2014; pp. 844–848. [Google Scholar]
- Li, G.Q.; Bai, Y.Q.; Yang, X.; Chen, Z.C.; Yu, H.K. Automatic deep learning land cover classification methods of high-resolution remotely sensed images. J. Geo-Inform. Sci. 2021, 23, 1690–1704. (In Chinese) [Google Scholar]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional networks for biomedical image segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; pp. 234–241. [Google Scholar]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. SegNet: A deep convolutional encoder-decoder architecture for image segmentation. IEEE Trans. Pattern Anal. 2017, 39, 2481–2495. [Google Scholar] [CrossRef] [PubMed]
- He, K.M.; Zhang, X.Y.; Ren, S.Q.; Sun, J. Deep residual learning for image recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Chen, L.C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. DeepLab: Semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected CRFs. IEEE Trans. Pattern Anal. 2018, 40, 834–848. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-Decoder with atrous separable convolution for semantic image segmentation. In Proceedings of the European conference on computer vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 33–851. [Google Scholar]
- Xu, H.M. Method Research of High Resolution Remote Sensing Imagery Classification Based on U-Net Model of Deep Learning. Master’s Thesis, Southwest Jiaotong University, Chengdu, China, 2018. (In Chinese). [Google Scholar]
- Ibtehaz, N.; Rahman, M.S. MultiResUNet: Rethinking the U-Net architecture for multimodal biomedical image segmentation. Neural Netw. 2020, 121, 74–87. [Google Scholar] [CrossRef]
- Pontius, R.G.; Millones, M. Death to Kappa: Birth of quantity disagreement and allocation disagreement for accuracy assessment. Int. J. Remote Sens. 2011, 32, 4407–4429. [Google Scholar] [CrossRef]
- Congalton, R.G. A review of assessing the accuracy of classifications of remotely sensed data. Remote Sens. Environ. 1991, 37, 35–46. [Google Scholar] [CrossRef]
- Hand, D.J.; Christen, P.; Kirielle, N. F*: An interpretable transformation of the F-measure. Mach. Learn. 2021, 110, 451–456. [Google Scholar] [CrossRef] [PubMed]
- Erenel, Z.; Altincay, H. Improving the precision-recall trade-off in undersampling-based binary text categorization using unanimity rule. Neural Comput. Appl. 2013, 22, S83–S100. [Google Scholar] [CrossRef]
- Feng, J.; Ding, J.L.; Wei, W.Y. Soil salinization monitoring based on Radar data. Remote Sens. Land Resour. 2019, 31, 195–203. [Google Scholar]
- Wang, D.; Wan, J.; Liu, S.; Chen, Y.; Yasir, M.; Xu, M.; Ren, P. BO-DRNet: An Improved Deep Learning Model for Oil Spill Detection by Polarimetric Features from SAR Images. Remote Sens. 2022, 14, 264. [Google Scholar] [CrossRef]
- Wu, F.; Wang, C.; Zhang, H.; Li, J.; Li, L.; Chen, W.; Zhang, B. Built-up area mapping in China from GF-3 SAR imagery based on the framework of deep learning. Remote Sens. Environ. 2021, 262, 112515. [Google Scholar] [CrossRef]
- Shi, C.; Jiang, Q.; Duan, F.; Shi, P. GF-2 Landuse classification based on UNET+CRF. Glob. Geol. 2021, 40, 146–153. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Data Observation Date | 23 April 2015 |
| Map Projection | UTM |
| Polarization | HH, HV, VH, VV |
| Product Type | HBQ |
| Operating Band | L band (1.2 GHz) |
| Satellite altitude | 628 km |
| Incident angle | 30.4° |
| Processing level | L1.1 |
| Operation mode | SM2 |
| Observation mode | Strip map (High-sensitive Quad) |
| Observation and orbit direction | Right, Ascending |
| File format | CEOS SAR |
| Swath | 40–50 km × 70 km (Range × Azimuth) |
| Nominal resolution | 5.1 × 4.3 m (Range × Azimuth) |
| Orbit path, frame | 158,730 |
| Number | Polarization | Statistical Value of Backscattering Coefficient (dB) | |||
|---|---|---|---|---|---|
| Minimum | Maximum | Average | Standard Deviation | ||
| 1 | HH | −50.415756 | 9.823721 | −17.312596 | 4.936925 |
| 2 | HV | −50.720654 | 2.014654 | −21.489555 | 5.107262 |
| 3 | VH | −51.055477 | 2.264093 | −26.473120 | 5.106566 |
| 4 | VV | −52.791847 | 9.967834 | −16.671018 | 4.556887 |
| Symbol | Class | Characteristics | Training | Validation | ||
|---|---|---|---|---|---|---|
| Plots | Pixels | Plots | Pixels | |||
| WB | Water Body | River, pond, swamp, lake | 32 | 4928 | 28 | 4312 |
| VG | Vegetation | Red willow, poplar, camel thorn, pike, grass, crops | 50 | 7700 | 42 | 6468 |
| BL | Barren land | Gobi, desert, rocky ground | 41 | 6314 | 38 | 5855 |
| HS | Strongly salinized soil | EC value 4–8 (dsm−1), salt crust is 2–10 cm, water table depth is 0.5–1.5 m, barren land with vegetation coverage less than 5% | 44 | 7040 | 42 | 6720 |
| MS | Moderately Salinized soil | EC value 4–6 (dsm−1), salt crust of 1–4 cm, water table depth is 1–2 m, vegetation coverage of around 5%–15% | 41 | 6519 | 40 | 6360 |
| SS | Slightly Salinized Soil | EC value 2–4 (dsm−1), with thin salt crust (around 0–2 cm), water table depth is 1.4–3 m, vegetation coverage of around 30% | 39 | 6162 | 41 | 6519 |
| Feature | Parameter Description | Symbols | Number of Parameters | Polarimetric Parameter |
|---|---|---|---|---|
| Original features | Scattering matrix elements | 3 | S11, S12, S21 | |
| Coherency matrix elements | 6 | T11, T22, T33, T44, T55, T66 | ||
| Covariance matrix elements | 3 | C11, C22, C33 | ||
| Backscatter coefficient | HH,HV,VH,VV | 4 | hh,hv,vh,vv | |
| Polarization decomposition parameters | Pauli | pauli | 3 | Pauli_r, Pauli_g, Pauli_b |
| Cloude | Cloude | 3 | Cloude_dbl_r, Cloude_vol_g, Cloude_surf_b | |
| Freemen | Freemen | 3 | Freeman_dbl_r, Freeman_vol_g, Freeman_surf_b | |
| H/A/Alpha | H/A/α | 3 | Entropy, Anisotropy, alpha | |
| Freeman Durden | Freeman | 3 | Freeman Durden_dbl_r, Freeman Durden_vol_g, Freeman Durden_surf b | |
| Sinclair | Sinclair | 3 | Sinclair_r, Sinclair_g, Sinclair_b | |
| Vanzyl | VZ | 3 | VanZyl_dbl_r, VanZyl_vol_g, VanZyl_surf_b | |
| Yamaguchi | Yam | 4 | Yamaguchi_dbl_r, Yamaguchi_vol_g, Yamaguchi_surf_b, Yamaguchi_hlx | |
| SAR discriminators | Radar vegetation index | RVI | 1 | rvi |
| Data | SVM | RF | DL | |||
|---|---|---|---|---|---|---|
| OA | Kappa | OA | Kappa | OA | Kappa | |
| OLI | 84.48% | 0.84 | 87.54% | 0.83 | 89.89 % | 0.86 |
| PALSAR-2 | 77.21% | 0.70 | 79.46% | 0.74 | 80.20% | 0.75 |
| OLI+PALSAR-2 | 87.28% | 0.87 | 90.27% | 0.87 | 91.86% | 0.90 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abulaiti, A.; Nurmemet, I.; Muhetaer, N.; Xiao, S.; Zhao, J. Monitoring of Soil Salinization in the Keriya Oasis Based on Deep Learning with PALSAR-2 and Landsat-8 Datasets. Sustainability 2022, 14, 2666. https://doi.org/10.3390/su14052666
Abulaiti A, Nurmemet I, Muhetaer N, Xiao S, Zhao J. Monitoring of Soil Salinization in the Keriya Oasis Based on Deep Learning with PALSAR-2 and Landsat-8 Datasets. Sustainability. 2022; 14(5):2666. https://doi.org/10.3390/su14052666
Chicago/Turabian StyleAbulaiti, Adilai, Ilyas Nurmemet, Nuerbiye Muhetaer, Sentian Xiao, and Jing Zhao. 2022. "Monitoring of Soil Salinization in the Keriya Oasis Based on Deep Learning with PALSAR-2 and Landsat-8 Datasets" Sustainability 14, no. 5: 2666. https://doi.org/10.3390/su14052666
APA StyleAbulaiti, A., Nurmemet, I., Muhetaer, N., Xiao, S., & Zhao, J. (2022). Monitoring of Soil Salinization in the Keriya Oasis Based on Deep Learning with PALSAR-2 and Landsat-8 Datasets. Sustainability, 14(5), 2666. https://doi.org/10.3390/su14052666