
Systematic Modeling and Analysis of On-Board Vehicle Integrated Novel Hybrid Renewable Energy System with Storage for Electric Vehicles

 ,
,  ,
,  , ,
, ,
Abstract
:1. Introduction
- SDG7: affordable, reliable, sustainable, and modern energy;
- SDG8: decent work and economic growth;
- SDG11: make cities inclusive, safe, resilient and sustainable;
- SDG13: take urgent action to combat climate change and its impacts.
2. Literature Review
3. Conceptual Design of ZFZE
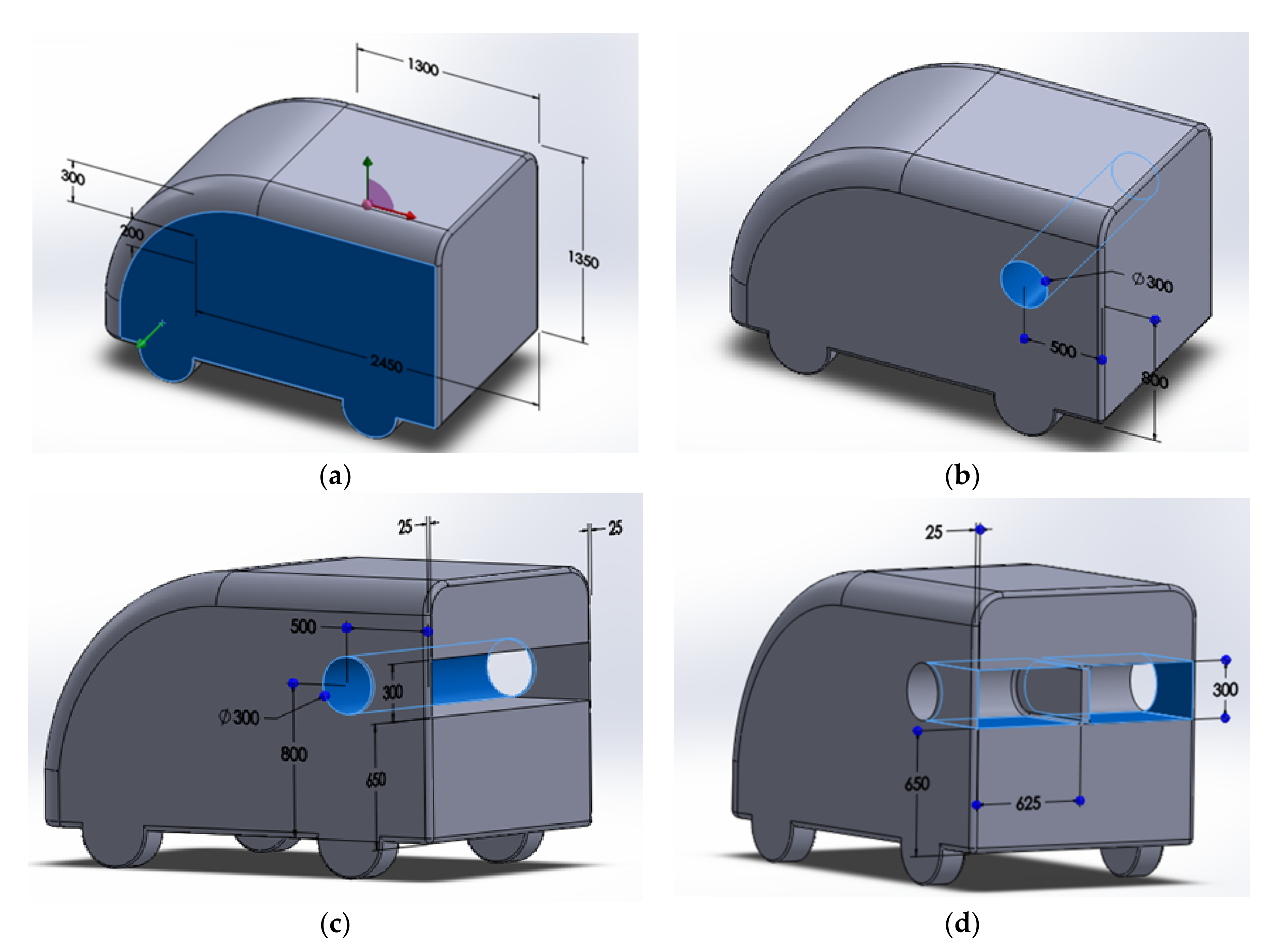
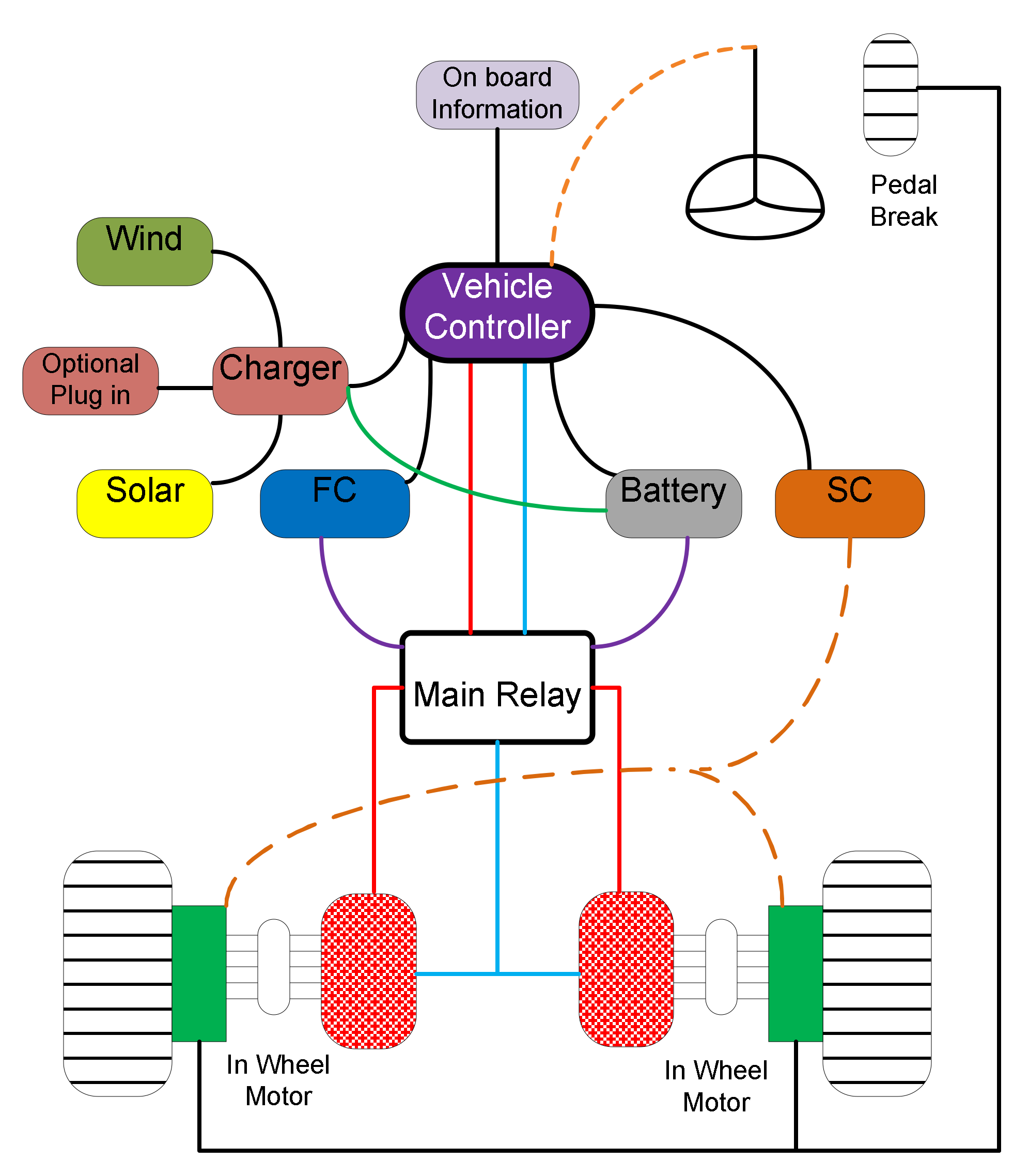
3.1. Overall Strusture
3.2. System Load & Battery Bank
3.3. Vehicle Power
- Rolling Resistance—the opposing force (friction force) the vehicle must overcome due to the rolling motion between the wheels and the surface on which the vehicle moves.
- Grade Resistance—the force due to gravity that pulls the vehicle back when it climbs an inclination.
- Acceleration Force—force that acts on the vehicle to accelerate it.
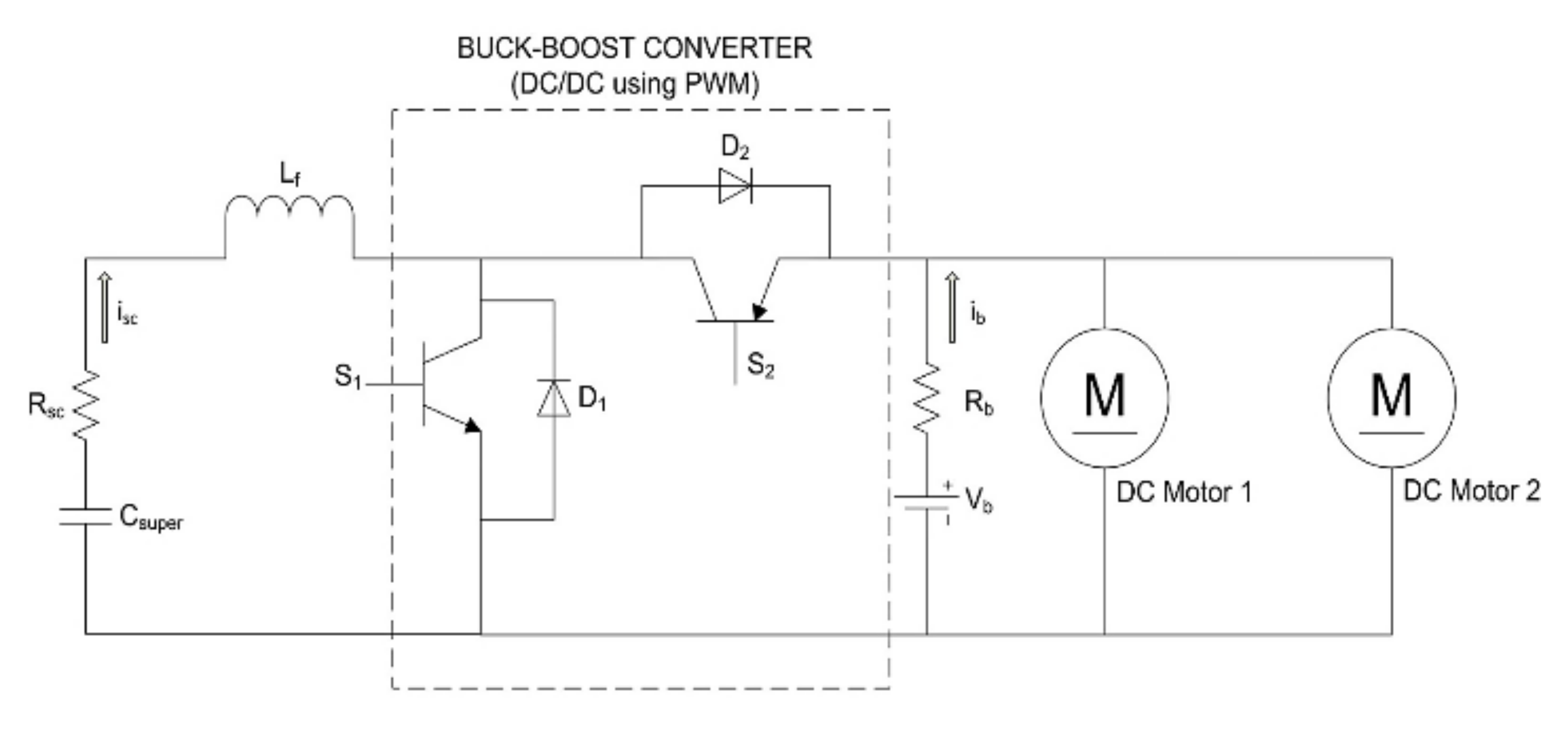
3.4. Design of Bidirectional Buck-Boost Converter
- Power needed for initial acceleration of vehicle to overcome the initial inertia.
- Braking power needed to bring vehicle to a stop.
- Cell voltage = 2.7 V
- Rated capacitance = 650 F
- Cell resistance = 0.8 mΩ
- Cells required = 75 V/2.7 V = 27 in series
- Parallel = 1 (single string)
3.5. FC Design
3.6. Wind Energy
3.7. Solar PV Energy
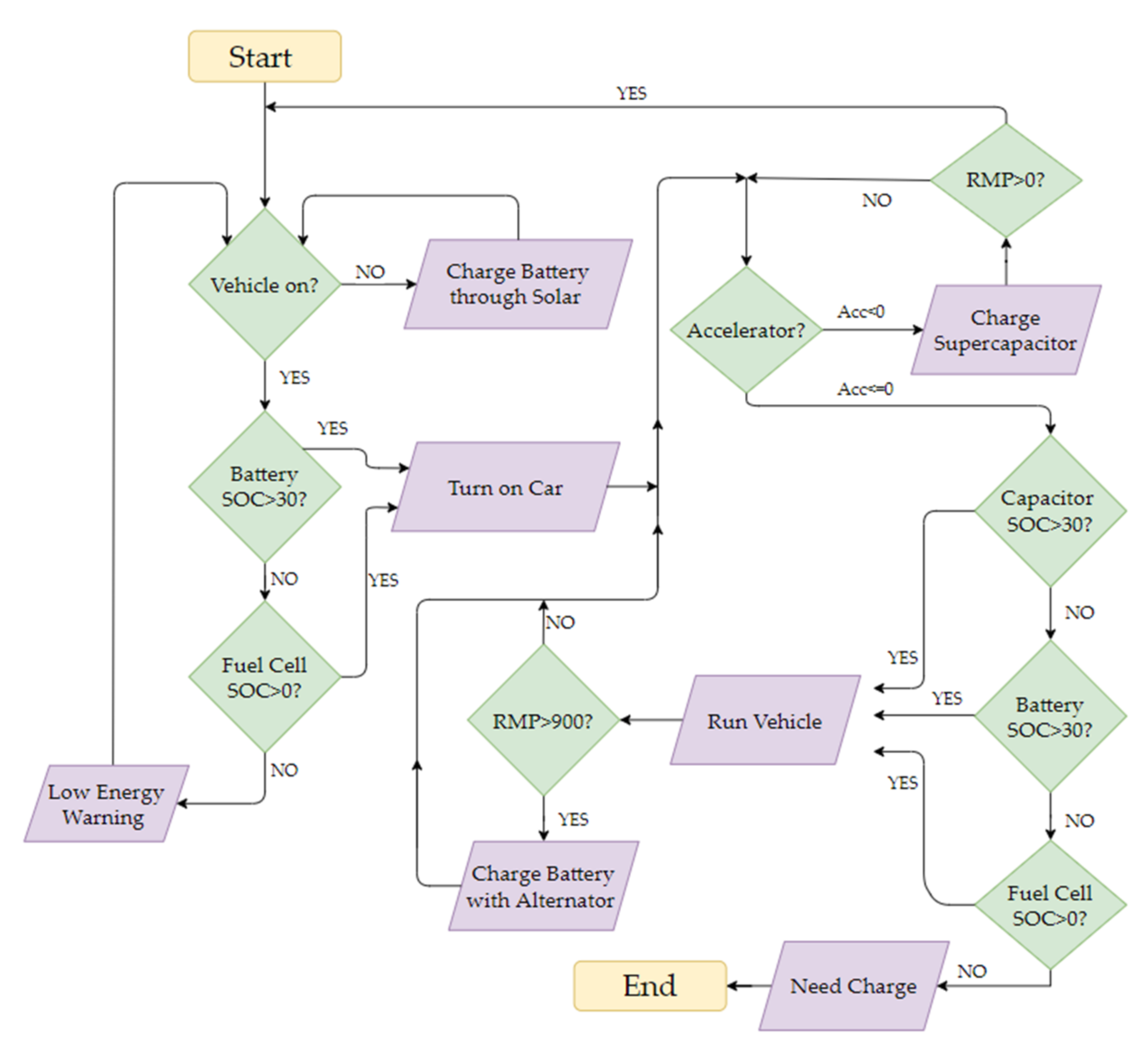
4. Rule-Based Control
5. Discussion
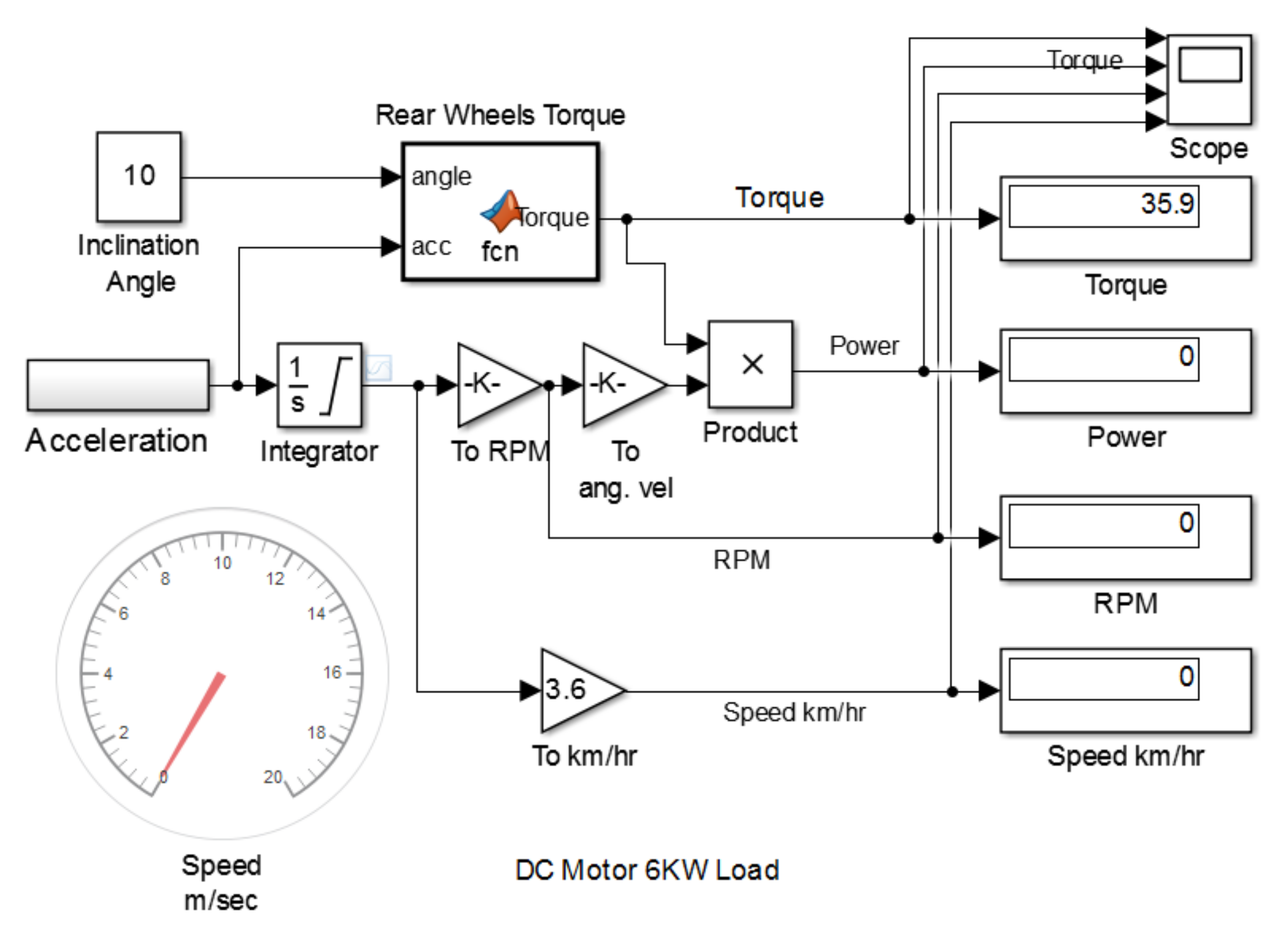
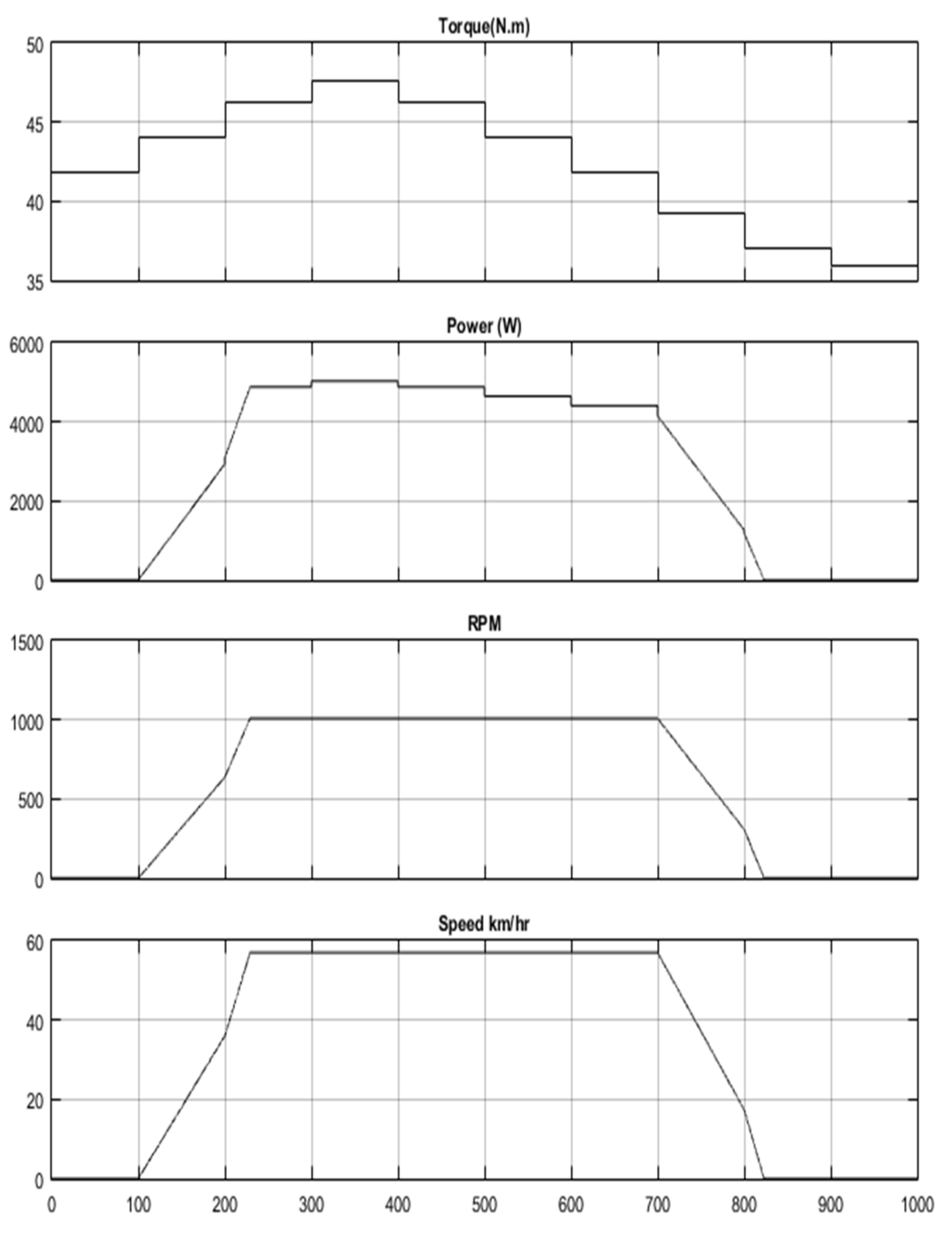
5.1. Vehicle Load Model
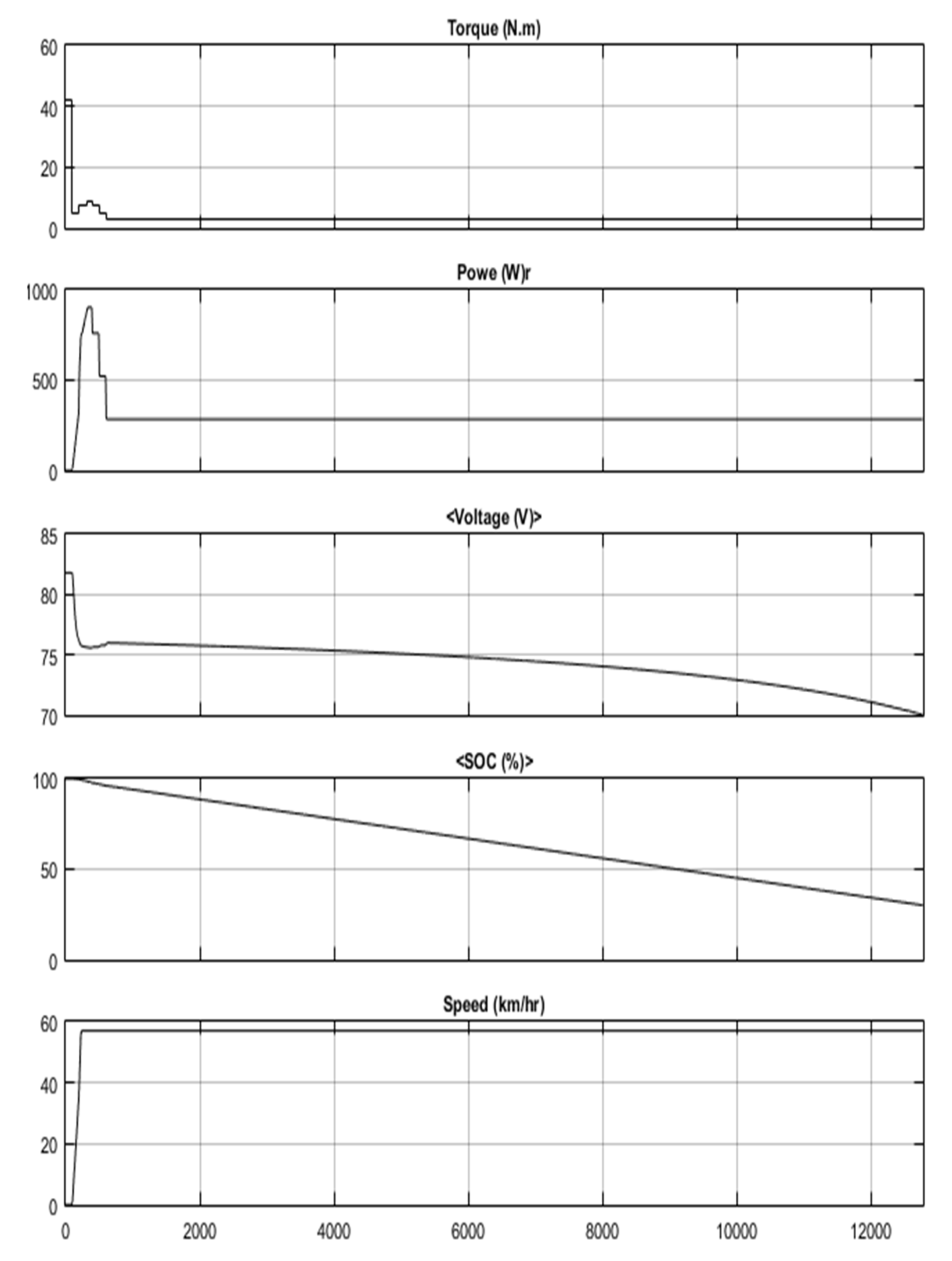
5.2. Battery Powered Load
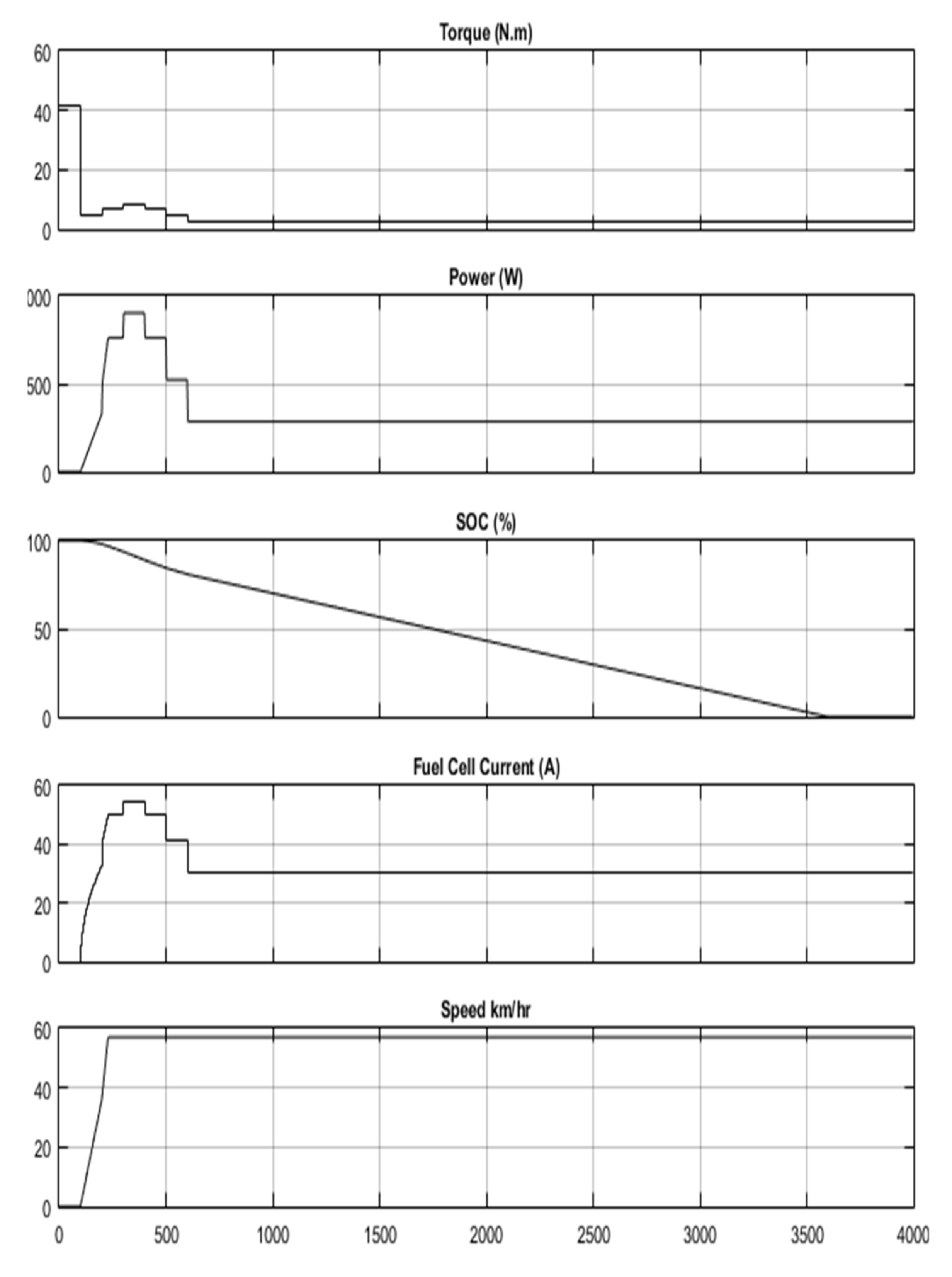
5.3. FC Powered Load
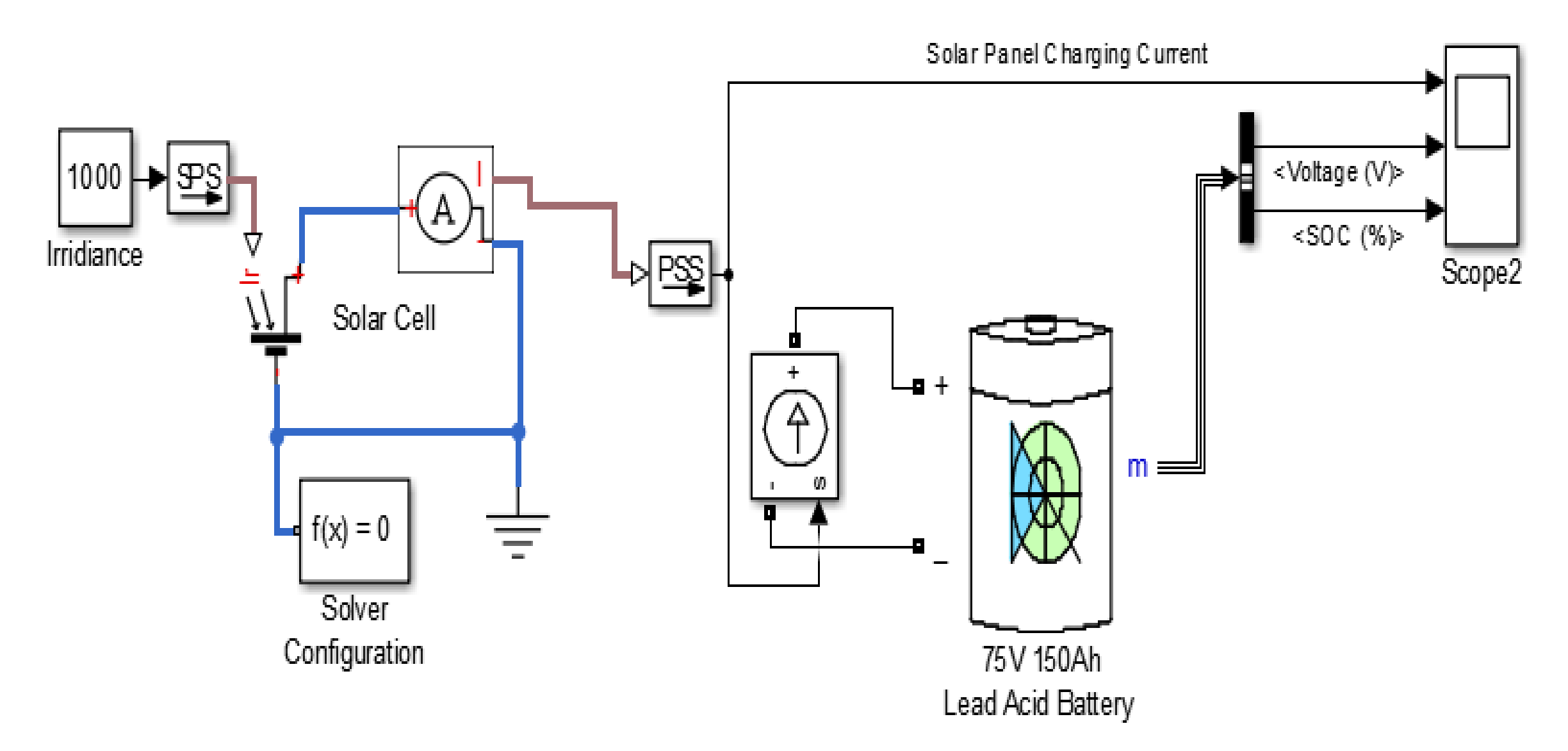
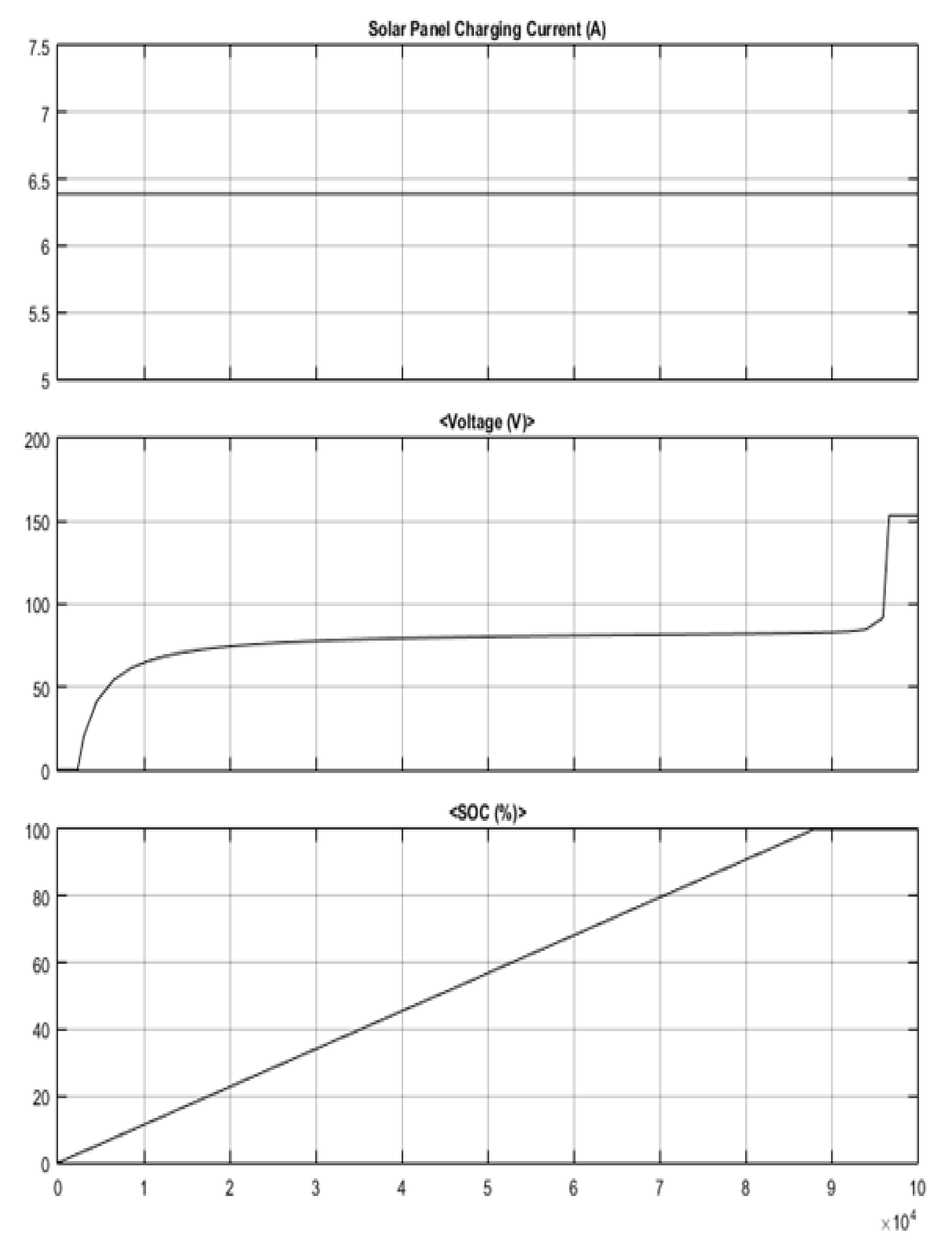
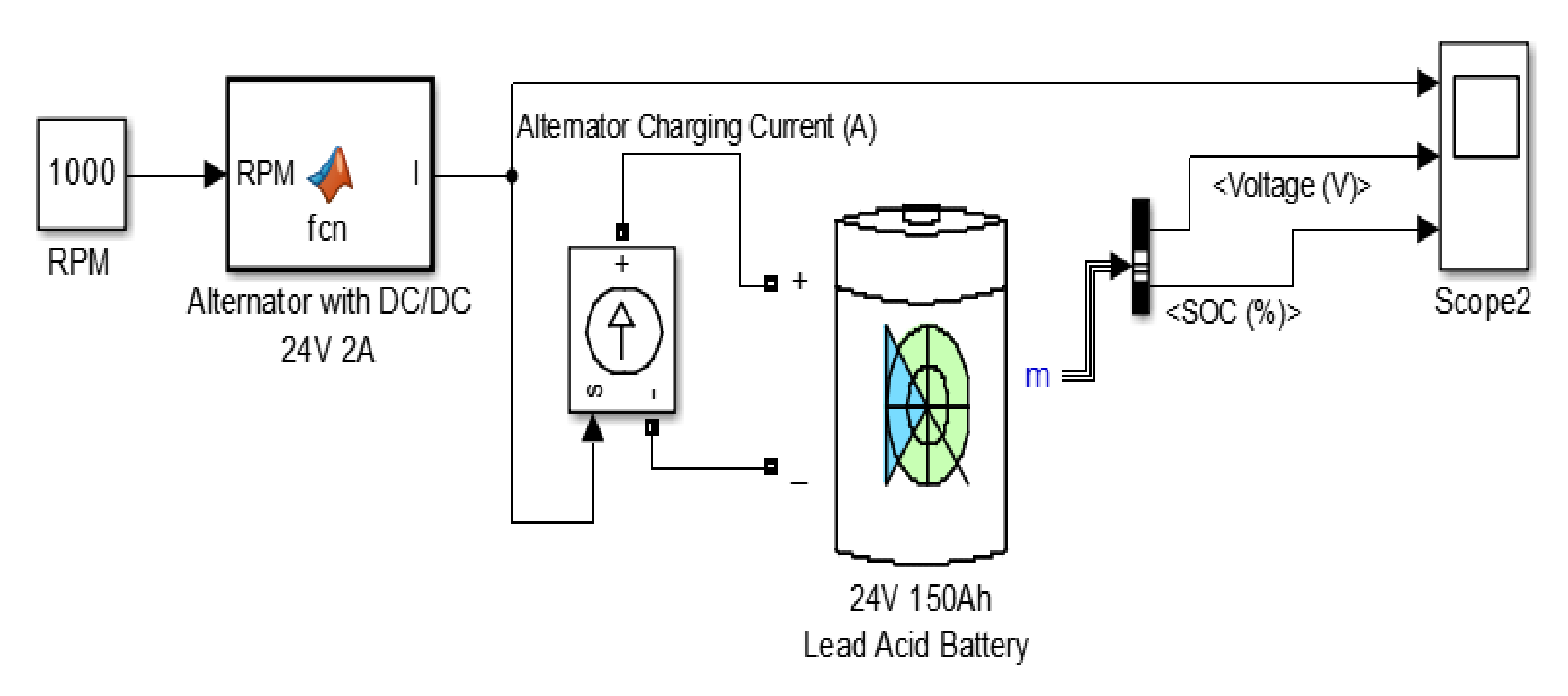
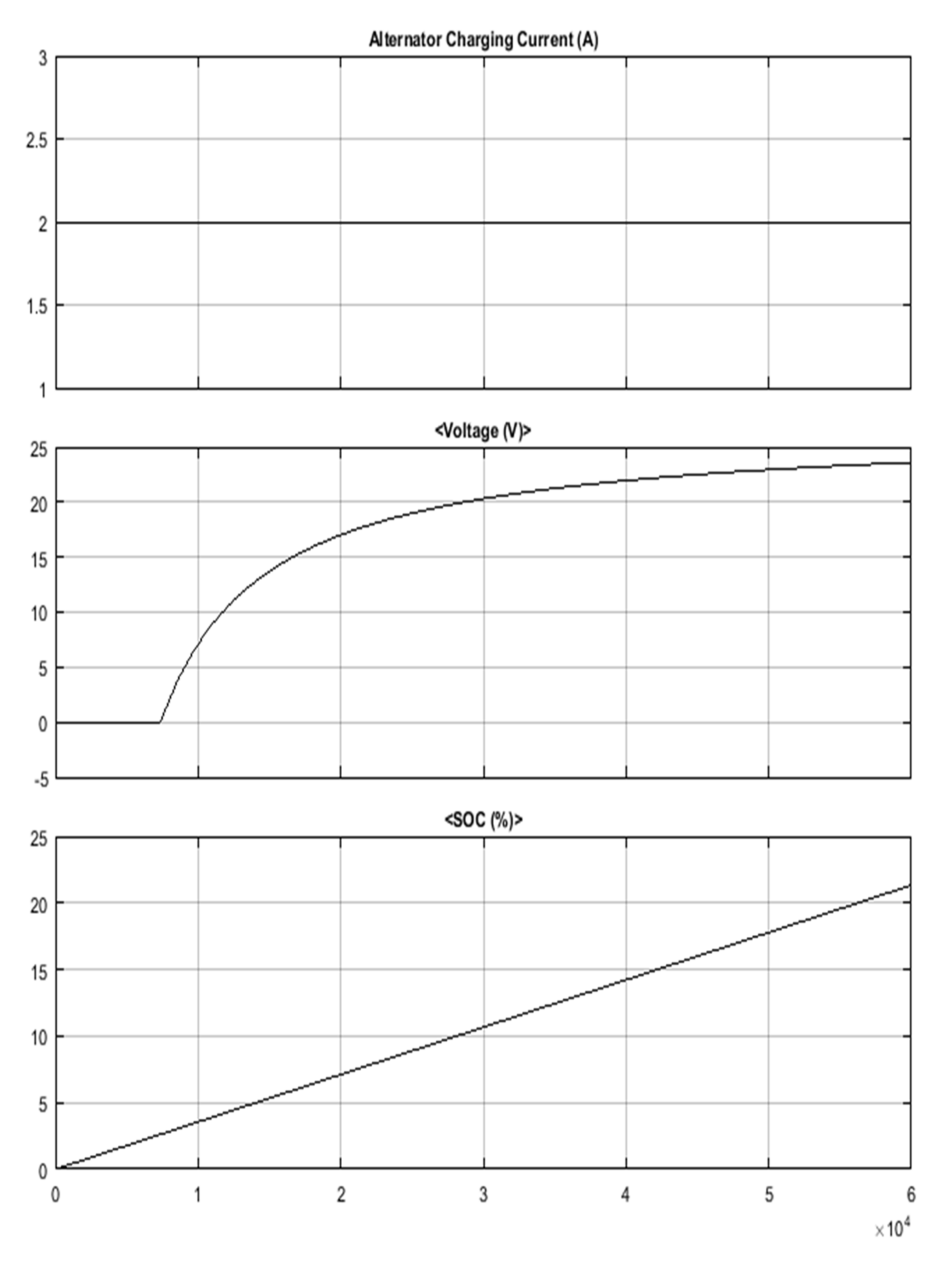
5.4. Solar Panel Charging Battery
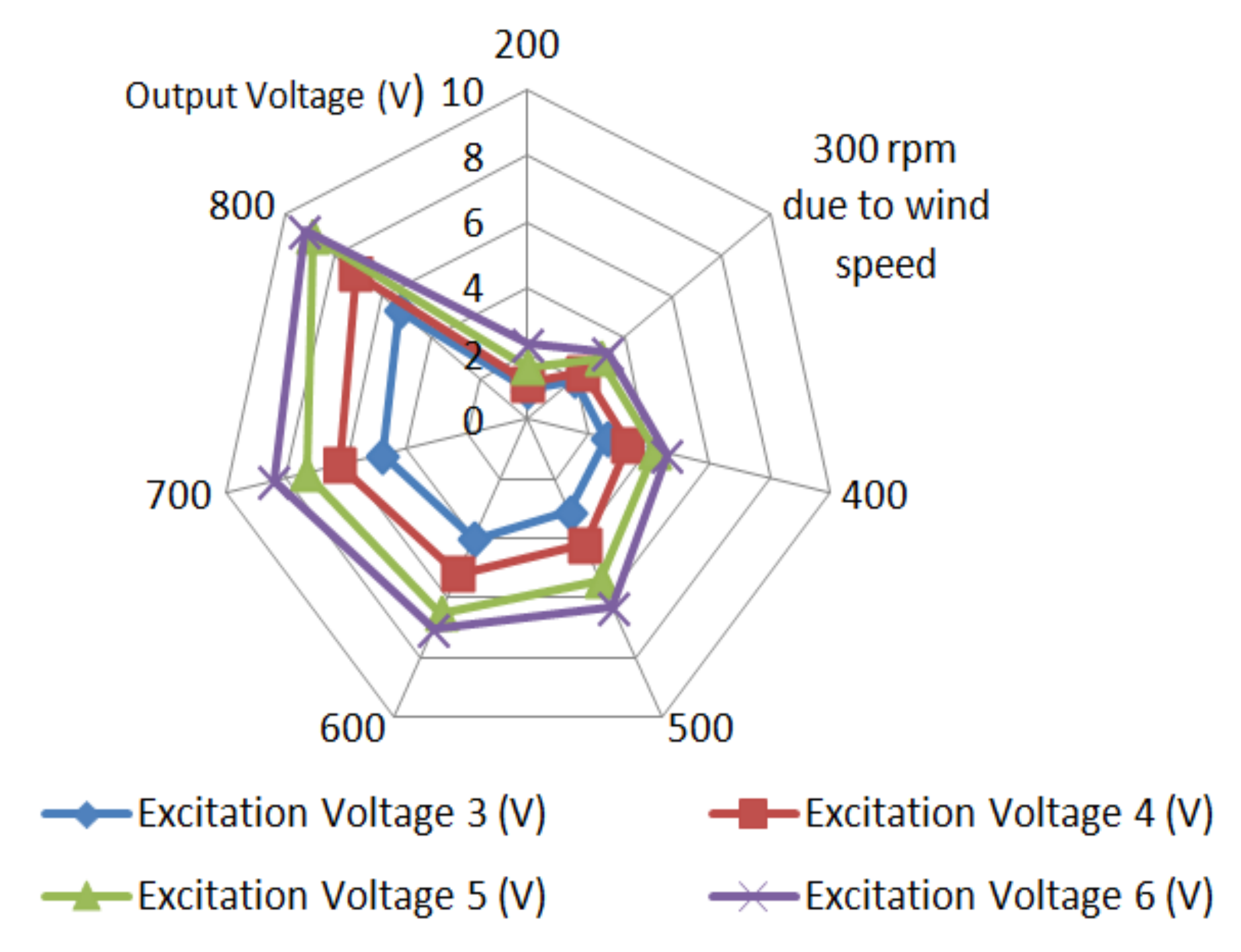
5.5. Wind Generation Used for Charging Battery
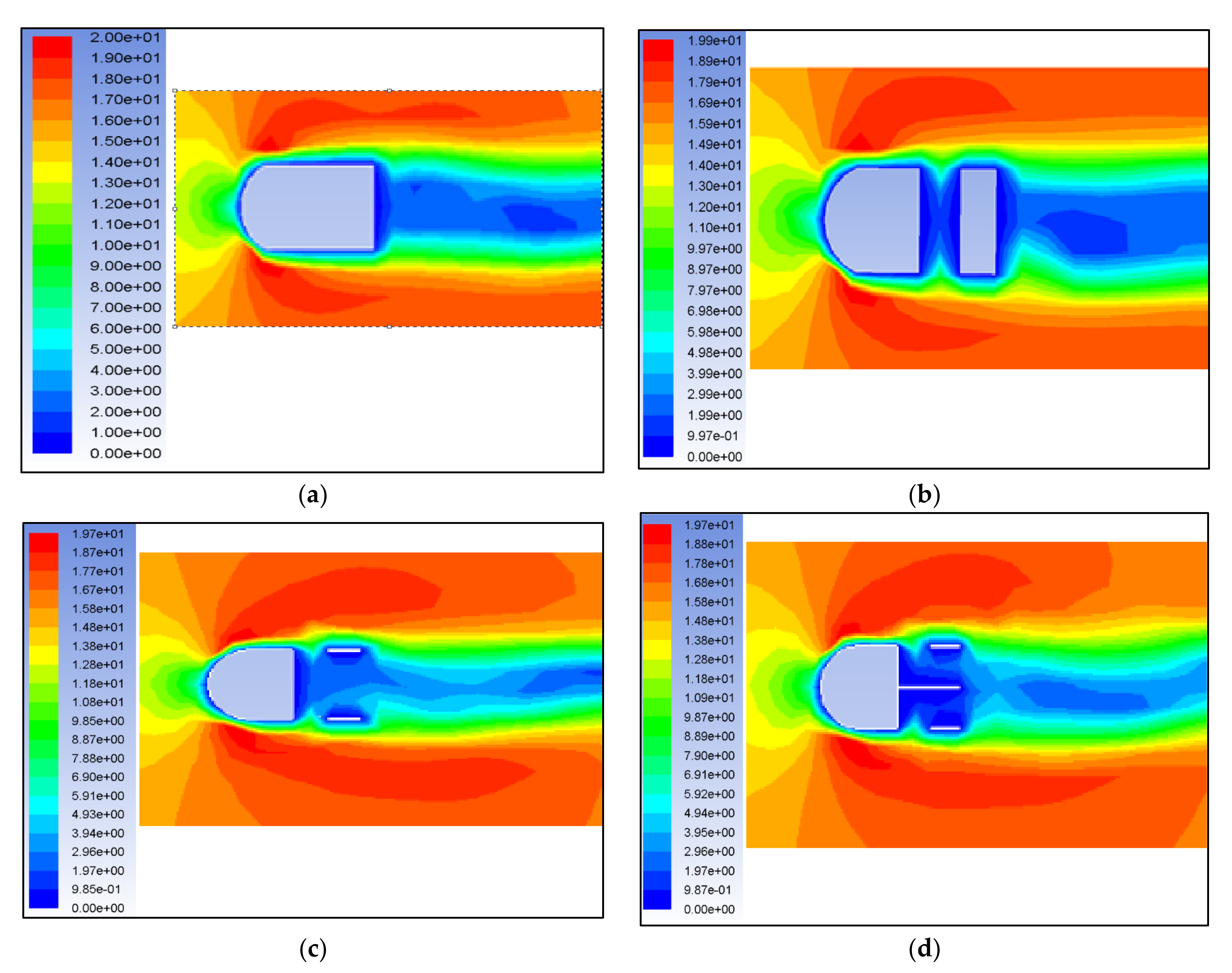
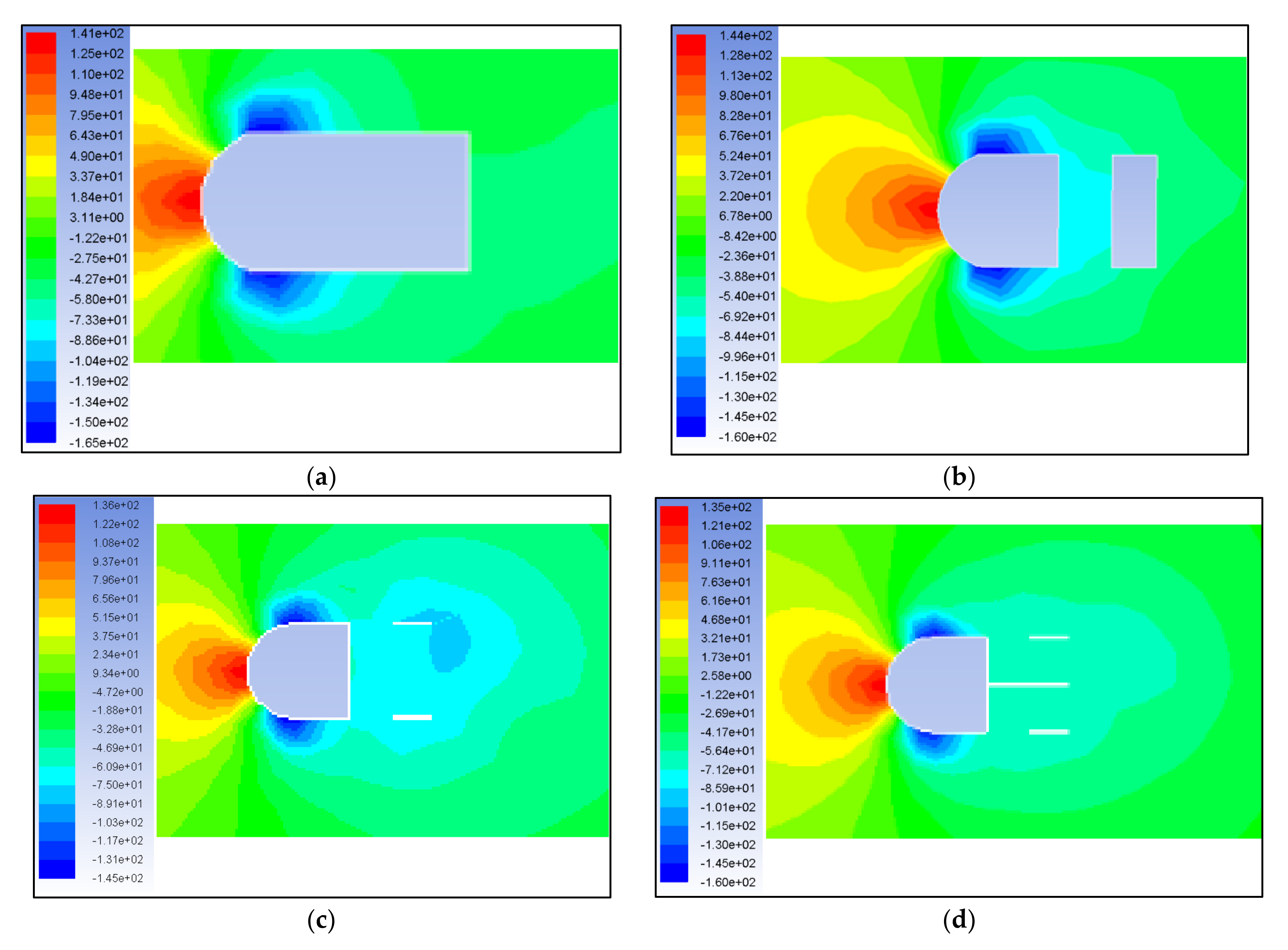
5.5.1. Velocity Flow over Different Models
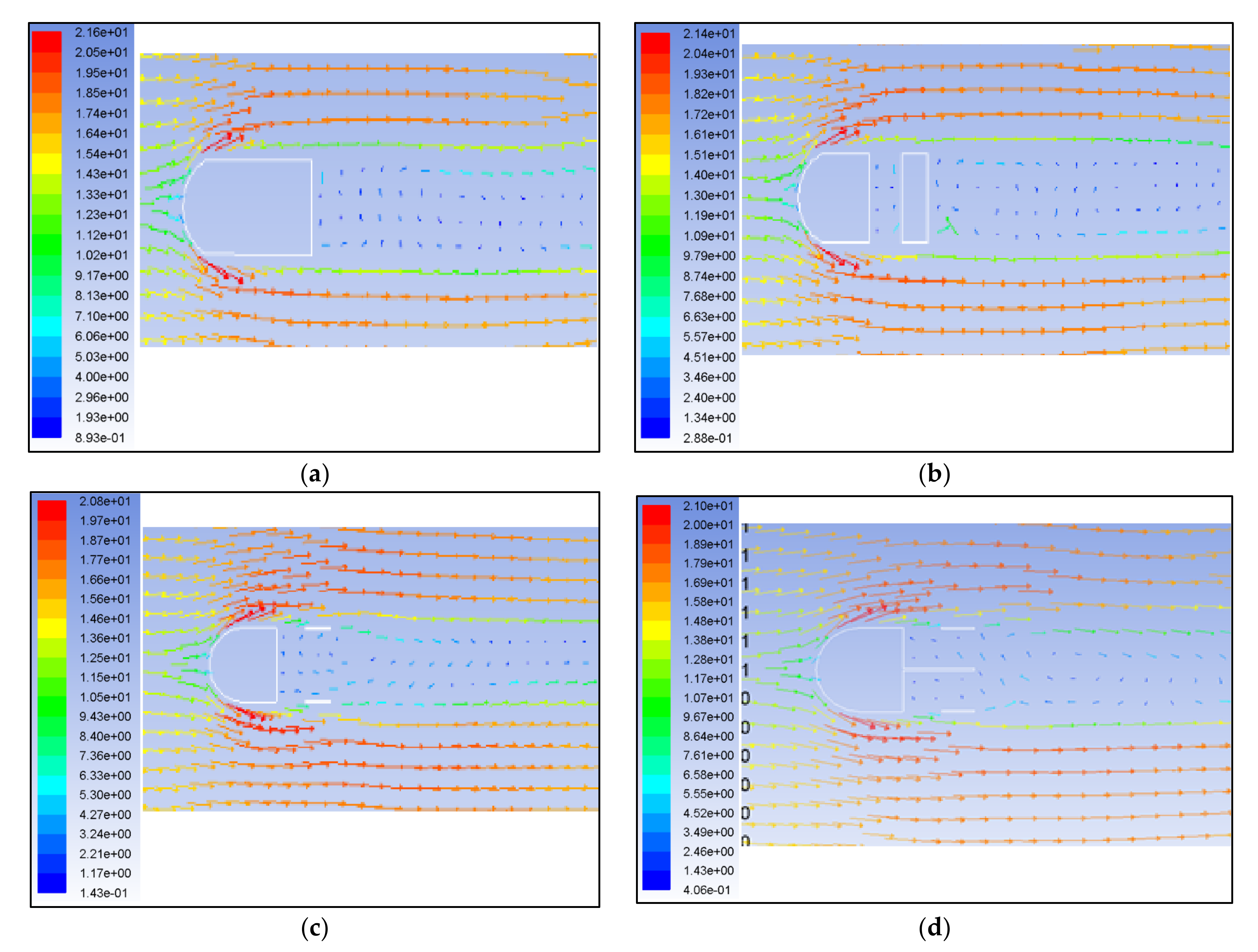
5.5.2. Velocity Vector over Vehicle
5.5.3. Pressure Contours over Vehicle
5.6. SC Load Supply
- Rated capacitance = 650 F;
- Rated voltage = 2.7 V;
- Number of series capacitors = 27;
- Number of parallel capacitors = 1;
- Initial voltage = 0 V.
6. Overall System
7. Interlinkages of EVs with SDGs
- SDG 7—Affordable and Clean Energy: Energy is a significant factor of the transportation world, whether be it water, air, rail, or land transport, hence it is critical to address and link with SDG7. The goal looks at providing affordable and clean energy requirements for the transport sector. The transportation sector can contribute by increasing the renewable energy mix in transportation and improving efficiency in the current and upcoming transport and its supporting technologies. Constant innovation through research and development has proved to be a sustainable way forward; in this research paper a new concept is being presented that would assist in achieving the sustainable transport sector.
- SDG 8—Decent Work and Economic Growth: The race towards sustainable transport will initiate the development of new and innovative industries to exploit new target markets with transportation innovations creating further employment and economic growth as a whole, taking into consideration the increasing demands of transport-associated services and products in developing nations.
- SDG 11—Sustainable Cities and Communities: The transportation sector is also an important sector and any enhancement in this sector will directly contribute towards sustainability in communities and cities. Hybrid electric vehicles will act as a frontline to reduce climate impacts and transition to a safe, resilient, and sustainable future for all.
- Goal 13—Climate Action: Climate change is triggered by the transportation sector as it is responsible for around a quarter of CO2 emissions and other harmful emissions. As long as the transport sector is energized through fossil fuels, the harmful emissions will continue to increase. Introducing new renewable and hybrid renewable technologies as presented in this paper will not only reduce harmful emissions but will help eradicate climate change.
8. Future Trends of EVs with SDGs
- In terms of accomplishing SDGs in the transportation sector, the global adoption of EV applications has been explored. However, several EV-related concerns, such as limited driving ranges, battery lives, long charging times, high starting costs, and inefficient EV-based regulations, must be thoroughly investigated. Additional study is warranted to produce an effective EMS design with greater operational mechanisms, as well as to encourage market rules and worldwide cooperation for efficient electric vehicle operations.
- Low impedance, excessive ripple current, and sensitive duty cycles are all problems with present converter designs used in EMSs. Additional research is needed in this area to enhance the converter design for high frequency and minimal losses. To achieve high robustness, mechanical strength, and power density, optimization based on mechanical design is also recommended.
- The reliability and stability of battery operation have considerably increased as a result of the use of EMSs in EV applications for managing battery heating and cooling. Unfortunately, due to heat difficulties and deep-diving distance loss, the efficiency of electric vehicles is diminished. Furthermore, the presence of heat effects as a result of the electrochemical process causes EMSs to be inaccurate and unstable. The use of SC in the ESS has been reported to reduce dynamic instability difficulties. Furthermore, the EMSs technology optimization approach may significantly alleviate battery aging and power restriction problems.
- While EMS-based EV applications have made significant progress towards the SDGs and decarbonization, environmental concerns such as soil and groundwater pollution must be taken into account. Battery disposal that is not perfect potentially leads to water and airborne health risks. Sufficient recycling and reusability procedures should be taken to avoid improper battery disposal in the environment.
9. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| BESS | Battery Energy Storage System |
| ESS | Energy Storage System |
| EV | Electric Vehicle |
| FC | Fuel Cell |
| FF | Fossil Fuel |
| FL | Fuzzy Logic |
| HEV | Hybrid Electric Vehicle |
| ICEV | Internal Combustion Engine Vehicle |
| PEM | Proton Exchange Membrane |
| PEMFC | Proton Exchange Membrane Fuel Cell |
| PEMFC–UC | Proton Exchange Membrane Fuel Cell and Ultra-Capacitor |
| PHEV | Plug-in Hybrid Electric Vehicle |
| PV | Photovoltaic |
| RER | Renewable Energy Resource |
| SC | Supercapacitor |
| SDG | Sustainable Development Goals |
| SDS | Sustainable Development Scenario |
| WE | Wind Energy |
| ZFZE | Zero-Fuel Zero-Emission |
References
- IEA. Available online: https://www.iea.org/reports/tracking-transport-2019 (accessed on 10 October 2021).
- Khalili, S.; Rantanen, E.; Bogdanov, D.; Breyer, C. Global Transportation Demand Development with Impacts on the Energy Demand and Greenhouse Gas Emissions in a Climate-Constrained World. Energies 2019, 12, 3870. [Google Scholar] [CrossRef] [Green Version]
- Bureika, G.; Matijošius, J.; Rimkus, A. Alternative Carbonless Fuels for Internal Combustion Engines of Vehicles. In Ecology in Transport: Problems and Solutions; Springer: Cham, Switzerland, 2020; pp. 1–49. [Google Scholar]
- Wang, H.; Chen, W. Modeling of energy transformation pathways under current policies, NDCs and enhanced NDCs to achieve 2-degree target. Appl. Energy 2019, 250, 549–557. [Google Scholar] [CrossRef]
- Kumar, N.M.; Chopra, S.S.; Chand, A.A.; Elavarasan, R.M.; Shafiullah, G. Hybrid Renewable Energy Microgrid for a Residential Community: A Techno-Economic and Environmental Perspective in the Context of the SDG7. Sustainability 2020, 12, 3944. [Google Scholar] [CrossRef]
- Rodrigues, A.; Bordado, J.C.; Santos, R.G.D. Upgrading the glycerol from biodiesel production as a source of energy carriers and chemicals—A technological review for three chemical pathways. Energies 2017, 10, 1817. [Google Scholar] [CrossRef] [Green Version]
- Prakash, K.; Islam, F.R.; Mamun, K.A.; Pota, H.R. Configurations of aromatic networks for power distribution system. Sustainability 2020, 12, 4317. [Google Scholar] [CrossRef]
- Islam, F.M.; Mamun, K.; Prakash, K.; Lallu, A. Aromatic network for power distribution system. IP Aust. Grant Certif. 2017, 30, 201710. [Google Scholar]
- Kuo, T.C.; Tseng, M.L.; Lin, C.H.; Wang, R.W.; Lee, C.H. Identifying sustainable behavior of energy consumers as a driver of design solutions: The missing link in eco-design. J. Clean. Prod. 2018, 192, 486–495. [Google Scholar] [CrossRef]
- Mo, W.; Yang, C.; Chen, X.; Lin, K.; Duan, S. Optimal Charging Navigation Strategy Design for Rapid Charging Electric Vehicles. Energies 2019, 12, 962. [Google Scholar] [CrossRef] [Green Version]
- Prakash, K.; Ali, M.; Islam, M.R.; Mo, H.; Dong, D.; Pota, H. Optimal Coordination of Photovoltaics and Electric Vehicles for Ancillary Services in Low Voltage Distribution Networks. In Proceedings of the 2021 24th International Conference on Electrical Machines and Systems (ICEMS), Gyeongju, Korea, 31 October–3 November 2021; pp. 1008–1013. [Google Scholar]
- Global EV Outlook 2019. Available online: https://www.iea.org/reports/global-ev-outlook-2019 (accessed on 10 October 2021).
- Islam, F.R.; Prakash, K.; Mamun, K.A.; Lallu, A.; Pota, H.R. Aromatic network: A novel structure for power distribution system. IEEE Access 2017, 5, 25236–25257. [Google Scholar] [CrossRef]
- Prakash, K.; Lallu, A.; Islam, F.R.; Mamun, K.A. Review of power system distribution network architecture. In Proceedings of the 2016 3rd Asia-Pacific World Congress on Computer Science and Engineering (APWC on CSE), Nadi, Fiji, 5–6 December 2016; pp. 124–130. [Google Scholar]
- Gherairi, S. Hybrid Electric Vehicle: Design and Control of a Hybrid System (Fuel Cell/Battery/Ultra-Capacitor) Supplied by Hydrogen. Energies 2019, 12, 1272. [Google Scholar] [CrossRef] [Green Version]
- Motavalli, J. Forward Drive: The Race to Build the Clean Car of the Future; Routledge: New York, NY, USA, 2014. [Google Scholar]
- Moriarty, P.; Honnery, D. The prospects for global green car mobility. J. Clean. Prod. 2008, 16, 1717–1726. [Google Scholar] [CrossRef]
- Amick, J.L.; Amick James, L. Wind-Powered Car. U.S. Patent 4,117,900, 1978. [Google Scholar]
- Saidur, R.; Masjuki, H.H.; Hasanuzzaman, M. Perfromance of an improved solar car ventilator. Int. J. Mech. Mater. Eng. 2009, 4, 24–34. [Google Scholar]
- Kendall, A.; Ambrose, H.; Maroney, E.; Deng, H. Program for Vehicle Regulatory Reform: Assessing Life Cycle-Based Greenhouse Gas Standards; University of California: Oakland, CA, USA, 2018. [Google Scholar]
- None, N. FY2017 Analysis Annual Progress Report (No. DOE/EE-1706); Vehicle Technologies Office, Dept. of Energy (DOE): Washington, DC, USA, 2018. [Google Scholar]
- Li, C.; Brewer, E.; Pham, L.; Jung, H. Reducing Mobile Air Conditioner (MAC) Power Consumption Using Active Cabin-Air-Recirculation in A Plug-In Hybrid Electric Vehicle (PHEV). World Electr. Veh. J. 2018, 9, 51. [Google Scholar] [CrossRef] [Green Version]
- Joshi, A. Review of vehicle engine efficiency and emissions. SAE Int. J. Adv. Curr. Pract. Mobil. 2019, 1, 734–761. [Google Scholar]
- Fahrenbruch, A.; Bube, R. Fundamentals of Solar Cells: Photovoltaic Solar Energy Conversion; Elsevier: Amsterdam, The Netherlands, 2012. [Google Scholar]
- Rekioua, D.; Bensmail, S.; Bettar, N. Development of hybrid photovoltaic-fuel cell system for stand-alone application. Int. J. Hydrogen Energy 2014, 39, 1604–1611. [Google Scholar] [CrossRef]
- Kumar, A.; Reddy, R.G. Effect of channel dimensions and shape in the flow-field distributor on the performance of polymer electrolyte membrane fuel cells. J. Power Source 2003, 113, 11–18. [Google Scholar] [CrossRef]
- Khaligh, A.; Li, Z. Battery, ultracapacitor, fuel cell, and hybrid energy storage systems for electric, hybrid electric, fuel cell, and plug-in hybrid electric vehicles: State of the art. IEEE Trans. Veh. Technol. 2010, 59, 2806–2814. [Google Scholar] [CrossRef]
- Cheng, Y.; Lataire, P. Research and test platform for hybrid electric vehicle with the super capacitor based energy storage. In Proceedings of the 2007 European Conference on Power Electronics and Applications, Aalborg, Denmark, 2–5 September 2007; pp. 1–10. [Google Scholar]
- Horrein, L.; Bouscayrol, A.; Cheng, Y.; Dumand, C.; Colin, G.; Chamaillard, Y. Influence of the heating system on the fuel consumption of a hybrid electric vehicle. Energy Convers. Manag. 2016, 129, 250–261. [Google Scholar] [CrossRef]
- Reddy, K.J.; Natarajan, S. Energy sources and multi-input DC-DC converters used in hybrid electric vehicle applications—A review. Int. J. Hydrogen Energy 2018, 43, 17387–17408. [Google Scholar] [CrossRef]
- Karunarathne, L.; Economou, J.T.; Knowles, K. Model based power and energy management system for PEM fuel cell/Li-Ion battery driven propulsion system. In Proceedings of the 5th IET International Conference on Power Electronics, Machines and Drives (PEMD 2010), Brighton, UK, 19–21 April 2010. [Google Scholar]
- Allag, T.; Das, T. Robust control of solid oxide fuel cell ultracapacitor hybrid system. IEEE Trans. Control Syst. Technol. 2011, 20, 1–10. [Google Scholar] [CrossRef]
- Yang, Y.P.; Liu, J.J.; Hu, T.H. An energy management system for a directly-driven electric scooter. Energy Convers. Manag. 2011, 52, 621–629. [Google Scholar] [CrossRef]
- Sperandio, G.S.; Nascimento, C.L.; Adabo, G.J. Modeling and simulation of nickel-cadmium batteries during discharge. In Proceedings of the 2011 Aerospace Conference, Big Sky, MT, USA, 5–12 March 2011; pp. 1–9. [Google Scholar]
- Castaner, L.; Silvestre, S. Modelling Photovoltaic Systems Using PSpice; John Wiley and Sons: Hoboken, NJ, USA, 2002. [Google Scholar]
- Lukic, S.; Mulhall, P.; Emadi, A. Energy Autonomous Solar⁄ battery Auto Rickshaw. J. Asian Electr. Veh. 2008, 6, 1135–1143. [Google Scholar] [CrossRef] [Green Version]
- Ustun, O.; Yilmaz, M.; Gokce, C.; Karakaya, U.; Tuncay, R.N. Energy management method for solar race car design and application. In Proceedings of the 2009 IEEE International Electric Machines and Drives Conference, Miami, FL, USA, 3–6 May 2009; pp. 804–811. [Google Scholar]
- Uzunoglu, M.; Alam, M.S. Dynamic modeling, design and simulation of a PEM fuel cell/ultra-capacitor hybrid system for vehicular applications. Energy Convers. Manag. 2007, 48, 1544–1553. [Google Scholar] [CrossRef]
- Barret, S. Japanese fuel cell rail vehicle in running tests. Fuel Cell Bull. 2006, 12, 2–3. [Google Scholar]
- García, P.; Torreglosa, J.P.; Fernández, L.M.; Jurado, F. Control strategies for high-power electric vehicles powered by hydrogen fuel cell, battery and supercapacitor. Expert Syst. Appl. 2013, 40, 4791–4804. [Google Scholar] [CrossRef]
- Fathabadi, H. Novel standalone hybrid solar/wind/fuel cell power generation system for remote areas. Sol. Energy 2017, 146, 30–43. [Google Scholar] [CrossRef]
- Jia, J.; Wang, G.; Cham, Y.T.; Wang, Y.; Han, M. Electrical characteristic study of a hybrid PEMFC and ultracapacitor system. IEEE Trans. Ind. Electron. 2009, 57, 1945–1953. [Google Scholar]
- Rahman, A.U.; Zehra, S.S.; Ahmad, I.; Armghan, H. Fuzzy Supertwisting Sliding Mode-Based Energy Management and Control of Hybrid Energy Storage System in Electric Vehicle Considering Fuel Economy. J. Energy Storage 2021, 37, 102468. [Google Scholar] [CrossRef]
- Xiao, B.; Ruan, J.; Yang, W.; Walker, P.D.; Zhang, N. A Review of Pivotal Energy Management Strategies for Extended Range Electric Vehicles. Renew. Sustain. Energy Rev. 2021, 149, 111194. [Google Scholar] [CrossRef]
- Zou, R.; Fan, L.; Dong, Y.; Zheng, S.; Hu, C. DQL Energy Management: An Online-Updated Algorithm and Its Application in Fix-Line Hybrid Electric Vehicle. Energy 2021, 225, 120174. [Google Scholar] [CrossRef]
- Polverino, P.; Arsie, I.; Pianese, C. Optimal Energy Management for Hybrid Electric Vehicles Based on Dynamic Programming and Receding Horizon. Energies 2021, 14, 3502. [Google Scholar] [CrossRef]
- Piperidis, S.; Chrysomallis, I.; Georgakopoulos, S.; Ghionis, N.; Doitsidis, L.; Tsourveloudis, N. A ROS-Based Energy Management System for a Prototype Fuel Cell Hybrid Vehicle. Energies 2021, 14, 1964. [Google Scholar] [CrossRef]
- Thanapalan, K.; Zhang, F.; Premier, G.; Maddy, J.; Guwy, A. Energy Management Effects of Integrating Regenerative Braking into a Renewable Hydrogen Vehicle. In Proceedings of the 2012 UKACC International Conference on Control, Cardiff, UK, 3–5 September 2012; pp. 924–928. [Google Scholar]
- Yang, Y.P.; Guan, R.M.; Huang, Y.M. Hybrid Fuel Cell Powertrain for a Powered Wheelchair Driven by Rim Motors. J. Power Source 2012, 212, 192–204. [Google Scholar] [CrossRef]
- Lv, Y.; Yuan, H.; Liu, Y.; Wang, Q. Fuzzy Logic Based Energy Management Strategy of Battery-Ultracapacitor Composite Power Supply for HEV. In Proceedings of the 2010 1st International Conference on Pervasive Computing, Signal Processing and Applications, PCSPA, Harbin, China, 17–19 September 2010; pp. 1209–1214. [Google Scholar]
- Rehman, U.; Feng, D.; Su, H.; Numan, M.; Abbas, F. Network Overloading Management by Exploiting the In-System Batteries of Electric Vehicles. Int. J. Energy Res. 2021, 45, 5866–5880. [Google Scholar] [CrossRef]
- Chen, L.; Ma, X.; Wei, S.; Yuan, D. Real-Time Energy Management Strategy of Multi-Wheel Electric Drive Vehicles with Load Power Prediction Function. IEEE Access 2021, 9, 20681–20694. [Google Scholar] [CrossRef]
- Deng, T.; Tang, P.; Luo, J. A Novel Real-Time Energy Management Strategy for Plug-in Hybrid Electric Vehicles Based on Equivalence Factor Dynamic Optimization Method. Int. J. Energy Res. 2021, 45, 626–641. [Google Scholar] [CrossRef]
- Tarascon, J.-M.; Recham, N.; Armand, M.; Chotard, J.-N.; Barpanda, P.; Walker, W.; Dupont, L. Hunting for Better Li-Based Electrode Materials via Low Temperature Inorganic Synthesis. Chem. Mater. 2009, 22, 724–739. [Google Scholar] [CrossRef]
- Hoque, M.M.; Hannan, M.A.; Mohamed, A. Optimal CC-CV Charging of Lithium-Ion Battery for Charge Equalization Controller. In Proceedings of the 2016 International Conference on Advances in Electrical, Electronic and Systems Engineering, ICAEES 2016, Putrajaya, Malaysia, 14–16 November 2017; pp. 610–615. [Google Scholar]
- Xu, H.; Shen, M. The Control of Lithium-Ion Batteries and Supercapacitors in Hybrid Energy Storage Systems for Electric Vehicles: A Review. Int. J. Energy Res. 2021, 45, 20524. [Google Scholar] [CrossRef]
- Torabi, R.; Gomes, Á.; Morgado-Dias, F. Energy Transition on Islands with the Presence of Electric Vehicles: A Case Study for Porto Santo. Energies 2021, 14, 3439. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, G. Experimental Study on a Semi-Active Battery-Supercapacitor Hybrid Energy Storage System for Electric Vehicle Application. IEEE Trans. Power Electron. 2020, 35, 1014–1021. [Google Scholar] [CrossRef]
- Perullo, C.; Mavris, D. A Review of Hybrid-Electric Energy Management and Its Inclusion in Vehicle Sizing. Aircr. Eng. Aerosp. Technol. Int. J. 2014, 86, 550–557. [Google Scholar] [CrossRef]
- Yang, B.; Wang, J.; Zhang, X.; Wang, J.; Shu, H.; Li, S.; He, T.; Lan, C.; Yu, T. Applications of Battery/Supercapacitor Hybrid Energy Storage Systems for Electric Vehicles Using Perturbation Observer Based Robust Control. J. Power Source 2020, 448, 227444. [Google Scholar] [CrossRef]
- De Melo, R.R.; Tofoli, F.L.; Daher, S.; Antunes, F.L.M. Interleaved Bidirectional DC–DC Converter for Electric Vehicle Applications Based on Multiple Energy Storage Devices. Electr. Eng. 2020, 102, 2011–2023. [Google Scholar] [CrossRef]
- Hu, Y.; Yu, Y.; Huang, K.; Wang, L. Development Tendency and Future Response about the Recycling Methods of Spent Lithium-Ion Batteries Based on Bibliometrics Analysis. J. Energy Storage 2020, 27, 101111. [Google Scholar] [CrossRef]
- Dunn, J.B.; Gaines, L.; Sullivan, J.; Wang, M.Q. Impact of Recycling on Cradle-to-Gate Energy Consumption and Greenhouse Gas Emissions of Automotive Lithium-Ion Batteries. Environ. Sci. Technol. 2012, 46, 12704–12710. [Google Scholar] [CrossRef]
- Amarakoon, S.; Smith, J.; Segal, B. Application of Life-Cycle Assessment to Nanoscale Technology: Lithium-Ion Batteries for Electric Vehicles; United States Environmental Protection Agency: Washington, DC, USA, 2013. [Google Scholar]
- Notter, D.A.; Gauch, M.; Widmer, R.; Wäger, P.; Stamp, A.; Zah, R.; Althaus, H.-J. Contribution of Li-Ion Batteries to the Environmental Impact of Electric Vehicles. Environ. Sci. Technol. 2010, 44, 6550–6556. [Google Scholar] [CrossRef]
- Liu, T.; Tang, X.; Wang, H.; Yu, H.; Hu, X. Adaptive Hierarchical Energy Management Design for a Plug-In Hybrid Electric Vehicle. IEEE Trans. Veh. Technol. 2019, 68, 11513–11522. [Google Scholar] [CrossRef]
- Papadis, E.; Tsatsaronis, G. Challenges in the Decarbonization of the Energy Sector. Energy 2020, 205, 118025. [Google Scholar] [CrossRef]
- Jägemann, C.; Fürsch, M.; Hagspiel, S.; Nagl, S. Decarbonizing Europe’s Power Sector by 2050—Analyzing the Economic Implications of Alternative Decarbonization Pathways. Energy Econ. 2013, 40, 622–636. [Google Scholar] [CrossRef]
- Child, M.; Kemfert, C.; Bogdanov, D.; Breyer, C. Flexible Electricity Generation, Grid Exchange and Storage for the Transition to a 100% Renewable Energy System in Europe. Renew. Energy 2019, 139, 80–101. [Google Scholar] [CrossRef]
- Li, Y.; Taghizadeh-Hesary, F. The economic feasibility of green hydrogen and fuel cell electric vehicles for road transport in China. Energy Policy 2022, 160, 112703. [Google Scholar] [CrossRef]
- Schulz, F.; Rode, J. Public charging infrastructure and electric vehicles in Norway. Energy Policy 2022, 160, 112660. [Google Scholar] [CrossRef]
- Yang, C. Running battery electric vehicles with extended range: Coupling cost and energy analysis. Appl. Energy 2022, 306, 118116. [Google Scholar] [CrossRef]
- Podder, A.K.; Supti, S.A.; Islam, S.; Malvoni, M.; Jayakumar, A.; Deb, S.; Kumar, N.M. Feasibility Assessment of Hybrid Solar Photovoltaic-Biogas Generator Based Charging Station: A Case of Easy Bike and Auto Rickshaw Scenario in a Developing Nation. Sustainability 2022, 14, 166. [Google Scholar] [CrossRef]
- Pal, A.; Bhattacharya, A.; Chakraborty, A.K. Placement of Public Fast-Charging Station and Solar Distributed Generation with Battery Energy Storage in Distribution Network Considering Uncertainties and Traffic Congestion. J. Energy Storage 2021, 41, 102939. [Google Scholar] [CrossRef]
- Fang, Y.; Asche, F.; Novan, K. The costs of charging Plug-in Electric Vehicles (PEVs): Within day variation in emissions and electricity prices. Energy Econ. 2018, 69, 196–203. [Google Scholar] [CrossRef]
- Pautasso, E.; Osella, M.; Caroleo, B. Addressing the Sustainability Issue in Smart Cities: A Comprehensive Model for Evaluating the Impacts of Electric Vehicle Diffusion. Systems 2019, 7, 29. [Google Scholar] [CrossRef] [Green Version]
- King, N.; Burgess, M.; Harris, M. Electric vehicle drivers use better strategies to counter stereotype threat linked to pro-technology than to pro-environmental identities. Transp. Res. Part F Traffic Psychol. Behav. 2019, 60, 440–452. [Google Scholar] [CrossRef]
- Onat, N.C.; Kucukvar, M.; Aboushaqrah, N.N.; Jabbar, R. How sustainable is electric mobility? A comprehensive sustainability assessment approach for the case of Qatar. Appl. Energy 2019, 250, 461–477. [Google Scholar] [CrossRef]
- Prakash, K.; Mamun, K.A.; Islam, F.R.; Chand, A.A.; Prasad, K.A.; Goundar, K.K.; Maharaj, S. Hybrid electric vehicle: Designing a control of solar/wind/battery/capacitor/fuel cell hybrid system. In Proceedings of the 2019 29th Australasian Universities Power Engineering Conference (AUPEC), Nadi, Fiji, 26–29 November 2019; pp. 1–6. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | EV Description and RE Integration | Operating Voltage (V) and Load Power | Efficiency (%) | System Description and Analysis |
|---|---|---|---|---|
| [34] |
| 400, 110 kW | Better ES | A proper simulation of power generation with electrolyze and hydrogen storage tank was conducted. |
| [35] |
| 48, 5–7 kW | 77 (E) and 73 (M) | The system was designed using four wheels, one electric motor, a conventional with PV-assisted and parallel hybrid configuration. |
| [36] |
| 48, 1.85 kW | 70 | An advanced EMS directly-drive vehicle was designed. |
| [37] |
| 300, 3.5 kW | 91 EM | EMS in solar car race. |
| [38] |
| 36, 300 W | 45 FC | Design and development of FC and SC based on electric bicycle. |
| [39] |
| 42, 15 kW | Better ES | PV/hydrogen-based hybrid power system combining BES/FC for HEV. |
| Issues | Challenges | Ref. |
|---|---|---|
| Power Distribution and Optimal EV Design |
| [43,44,45,46,47,48,49,50] |
| Battery Thermal Management |
| [43,44,51,52,53,54] |
| Battery Storage Life Cycle and Aging |
| [43,44,47,55,56,57] |
| Power Electronic Controller and Converter |
| [58,59,60,61] |
| Environmental and Decarburization |
| [57,62,63,64,65] |
| Standard Regulation and Policy |
| [66,67,68,69] |
| Ref. | Year | Description | Connecting SDGs |
|---|---|---|---|
| [70] | 2022 | A model was developed using FC to estimate the carbon emission of the hydrogen supply for an EV. |
|
| [71] | 2022 | A public charging station was modeled and developed for EVs in Norway. |
|
| [72] | 2022 | In relation to EV, an effective cost analysis for a BESS is presented. |
|
| [73] | 2021 | A feasibility study of a hybrid solar PV-biogas generator-based charging station for an easy bike and auto rickshaw scenario in a developing nation was analyzed. |
|
| [74] | 2021 | Public fast-charging stations (PFCSs), solar distributed generation, and BESs as well as their scheduling, were designed. |
|
| [75] | 2019 | The maximum electricity emission rates and marginal electricity prices for charging an EV on a daily basis were assessed. |
|
| [76] | 2019 | A direct qualitative study to determine the elements that influence individual acceptance of self-driving electric buses was conducted. |
|
| [77] | 2019 | The effects of categorizing threats on EV drivers was examined. |
|
| [78] | 2019 | A life cycle sustainability assessment was conducted for EV technologies. |
|
| Characteristic | Value |
|---|---|
| Power | 3000 W |
| Voltage | 72 V DC |
| Maximum Current | 70–80 A |
| Maximum Torque | 90–150 Nm |
| Wheel Diameter | 300 mm |
| Characteristic | Value |
|---|---|
| Capacity | 150 Ah |
| Bank Voltage | 72 V DC |
| Single Battery Voltage | 70 V |
| Quantity in series | 6 |
| Characteristic | Value |
|---|---|
| Weight | 15,000 N |
| 0.012 on asphalt | |
| Gravitational Acceleration g | 10 m/s2 |
| 0.15 m | |
| 0.1 | |
| Angle of Inclination | α |
| Torque (Total) | τ |
| Characteristic | Value |
|---|---|
| RPM (maximum) | 1000 rpm |
| Speed (maximum) | 56.55 km/hr |
| Acceleration (maximum) | 0.262 m/s2 |
| Revolutions per minute | 0.015708 m/s |
| Characteristic | Value |
|---|---|
| τmax | 405 Nm |
| Wheel circumference | 1.7687 m |
| ∆ speed | 166.8 m/mim |
| Angular velocity | 6.18 rad/s |
| Maximum power | 2.5 kW |
| Solar Array Sizing | Value |
|---|---|
| Power rating | 70 W |
| Peak efficiency | 19.3% |
| Maximum power current | 4.07 A |
| Maximum power voltage | 17.2 V |
| Open circuit voltage | 21.6 V |
| Short circuit current | 4.35 A |
| Panel connected in series | 5 |
| Action | Acceleration (m/s2) | Time (s) |
|---|---|---|
| Park | 0 | |
| Accelerate | 0.262 | 100 |
| Release Accelerator and Cruise | 0 | 160 |
| Full Brake | −3 | 1000 |
| Accelerate | 0.262 | 1200 |
| Release Accelerator and Cruise | 0 | 1260 |
| Half Brake | −1.5 | 2000 |
| Accelerate | 0.262 | 2005 |
| Release Accelerator and Cruise | 0 | 2035 |
| Full Brake | −3 | 5000 |
| Accelerate | 0.262 | 5100 |
| Release Accelerator and Cruise | 0 | 5160 |
| Full Brake | 0.262 | 20,000 |
| Accelerate | 0 | 20,010 |
| Release Accelerator and Cruise | 0 | 20,070 |
| Full Brake | −3 | 3500 |
| Accelerate | 0.262 | 35,010 |
| Release Accelerator and Cruise | 0 | 35,070 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mamun, K.A.; Islam, F.R.; Haque, R.; Chand, A.A.; Prasad, K.A.; Goundar, K.K.; Prakash, K.; Maharaj, S. Systematic Modeling and Analysis of On-Board Vehicle Integrated Novel Hybrid Renewable Energy System with Storage for Electric Vehicles. Sustainability 2022, 14, 2538. https://doi.org/10.3390/su14052538
Mamun KA, Islam FR, Haque R, Chand AA, Prasad KA, Goundar KK, Prakash K, Maharaj S. Systematic Modeling and Analysis of On-Board Vehicle Integrated Novel Hybrid Renewable Energy System with Storage for Electric Vehicles. Sustainability. 2022; 14(5):2538. https://doi.org/10.3390/su14052538
Chicago/Turabian StyleMamun, Kabir A., F. R. Islam, R. Haque, Aneesh A. Chand, Kushal A. Prasad, Krishneel K. Goundar, Krishneel Prakash, and Sidharth Maharaj. 2022. "Systematic Modeling and Analysis of On-Board Vehicle Integrated Novel Hybrid Renewable Energy System with Storage for Electric Vehicles" Sustainability 14, no. 5: 2538. https://doi.org/10.3390/su14052538
APA StyleMamun, K. A., Islam, F. R., Haque, R., Chand, A. A., Prasad, K. A., Goundar, K. K., Prakash, K., & Maharaj, S. (2022). Systematic Modeling and Analysis of On-Board Vehicle Integrated Novel Hybrid Renewable Energy System with Storage for Electric Vehicles. Sustainability, 14(5), 2538. https://doi.org/10.3390/su14052538