
Influence of Aggregate Pollution in Truck Escape Ramps on Stopping Distance of Uncontrolled Vehicles

Abstract
:1. Introduction
2. Methodology
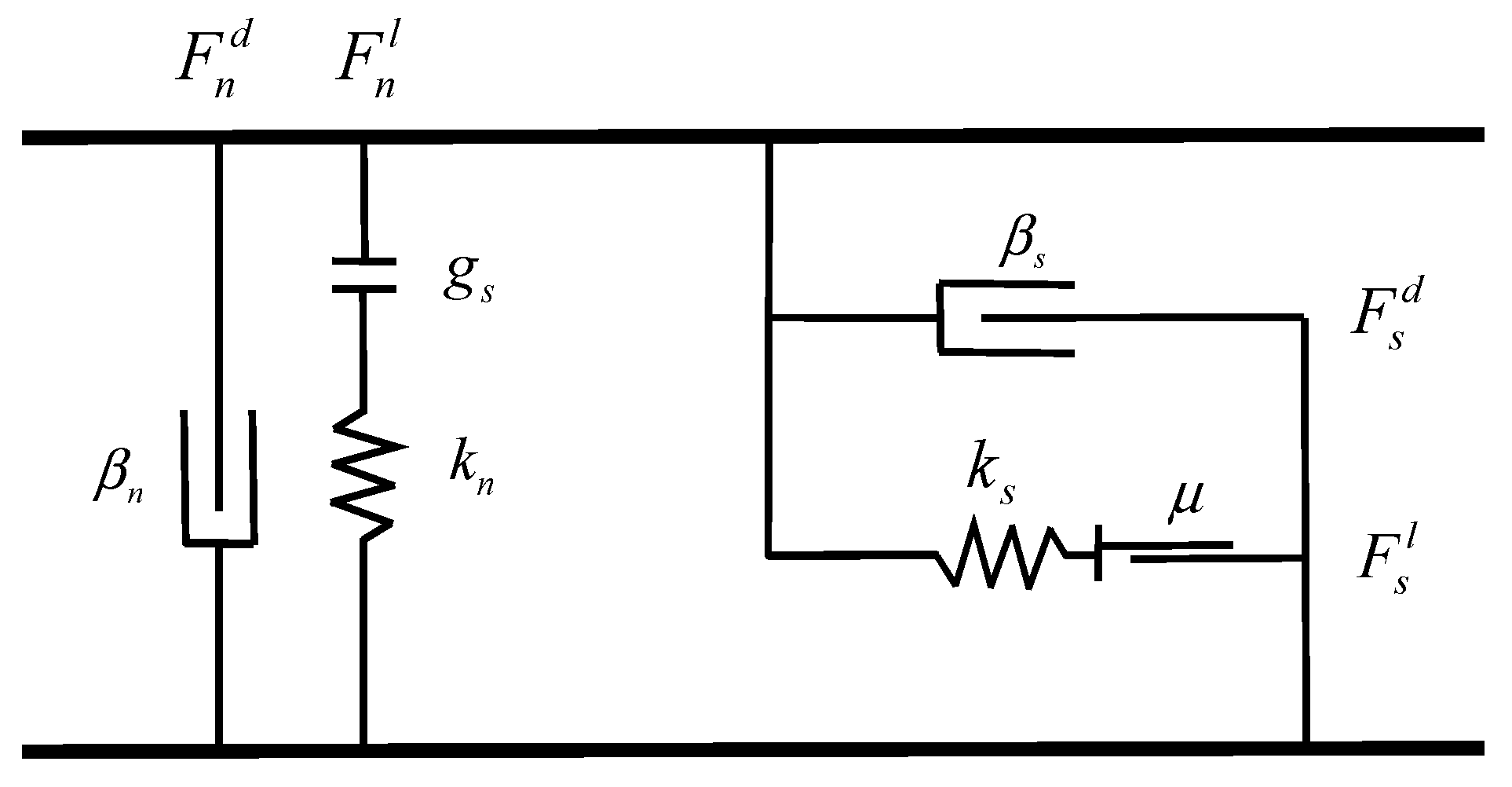
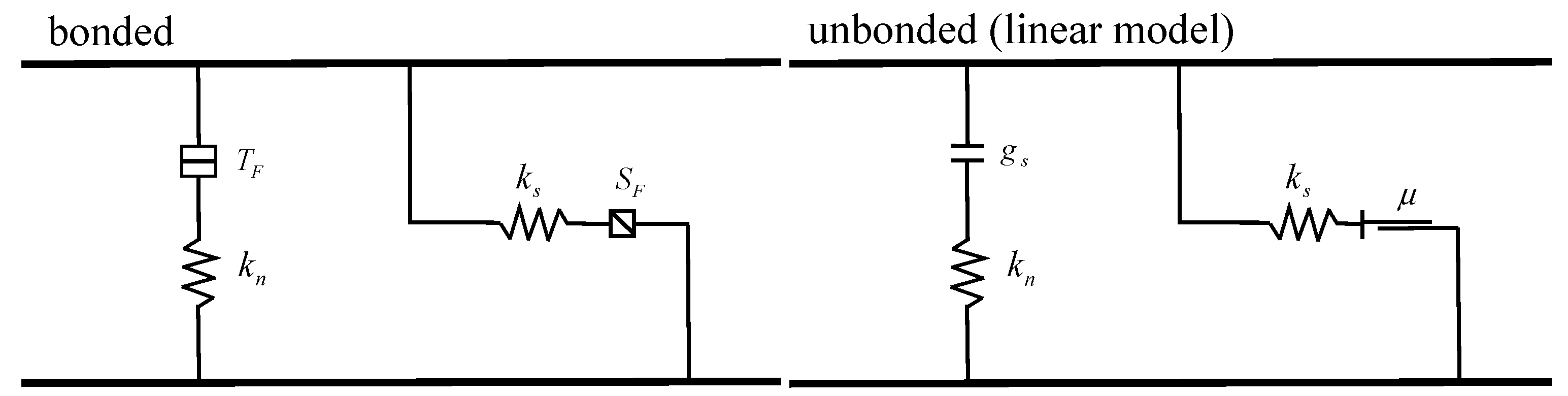
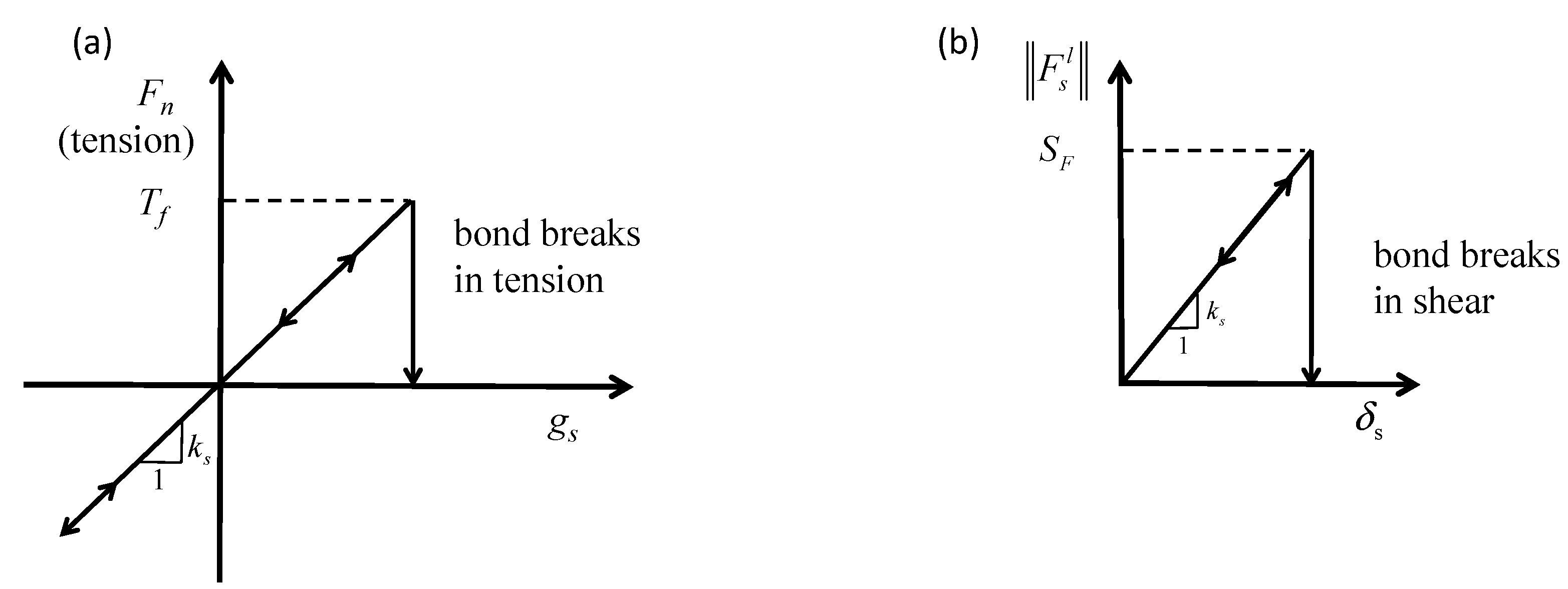
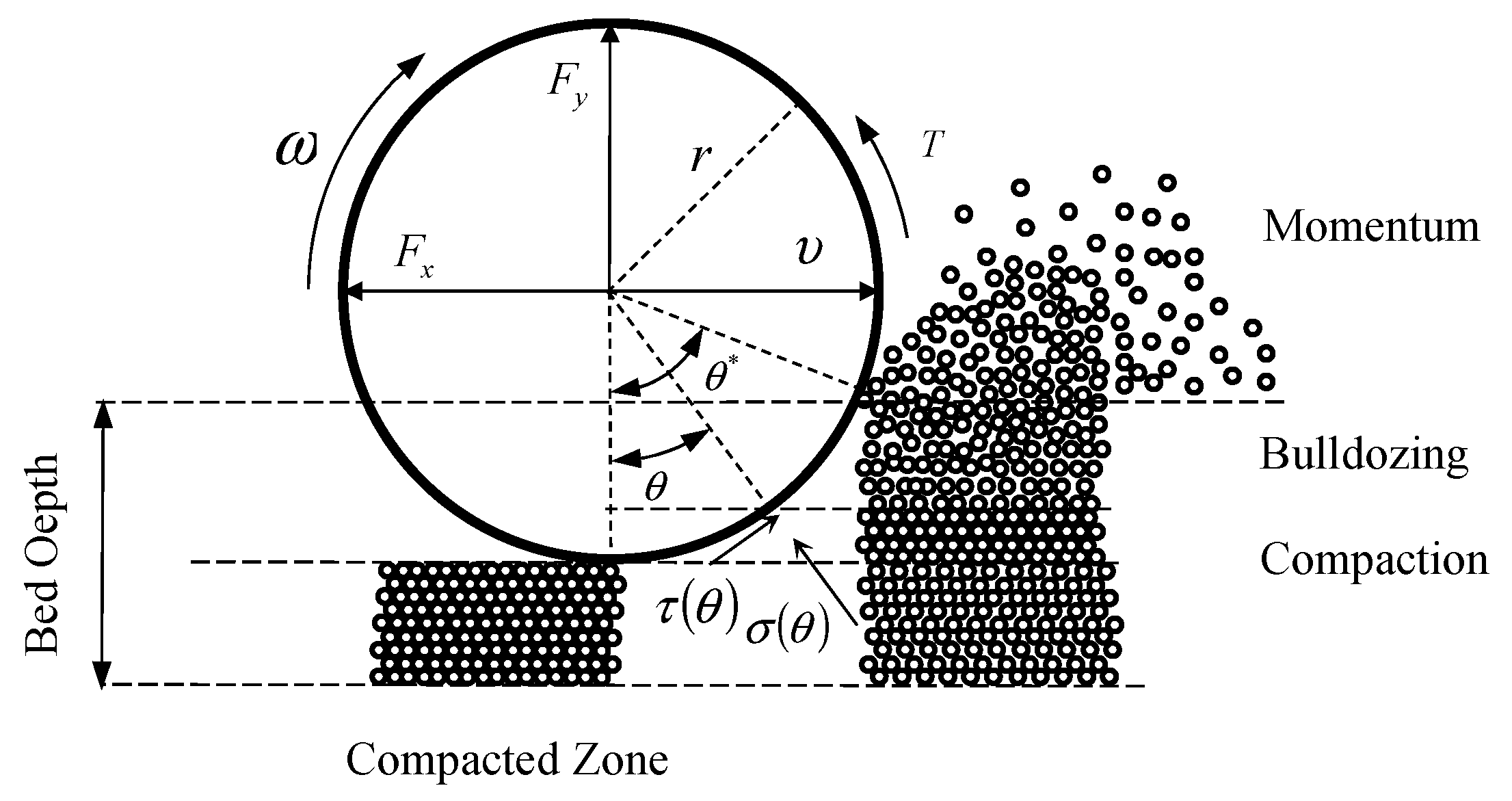
2.1. Constitutive Model
2.2. Build Wheel–Aggregate Model
2.3. Gravel Model Calibration
2.4. Wheel Model Calibration
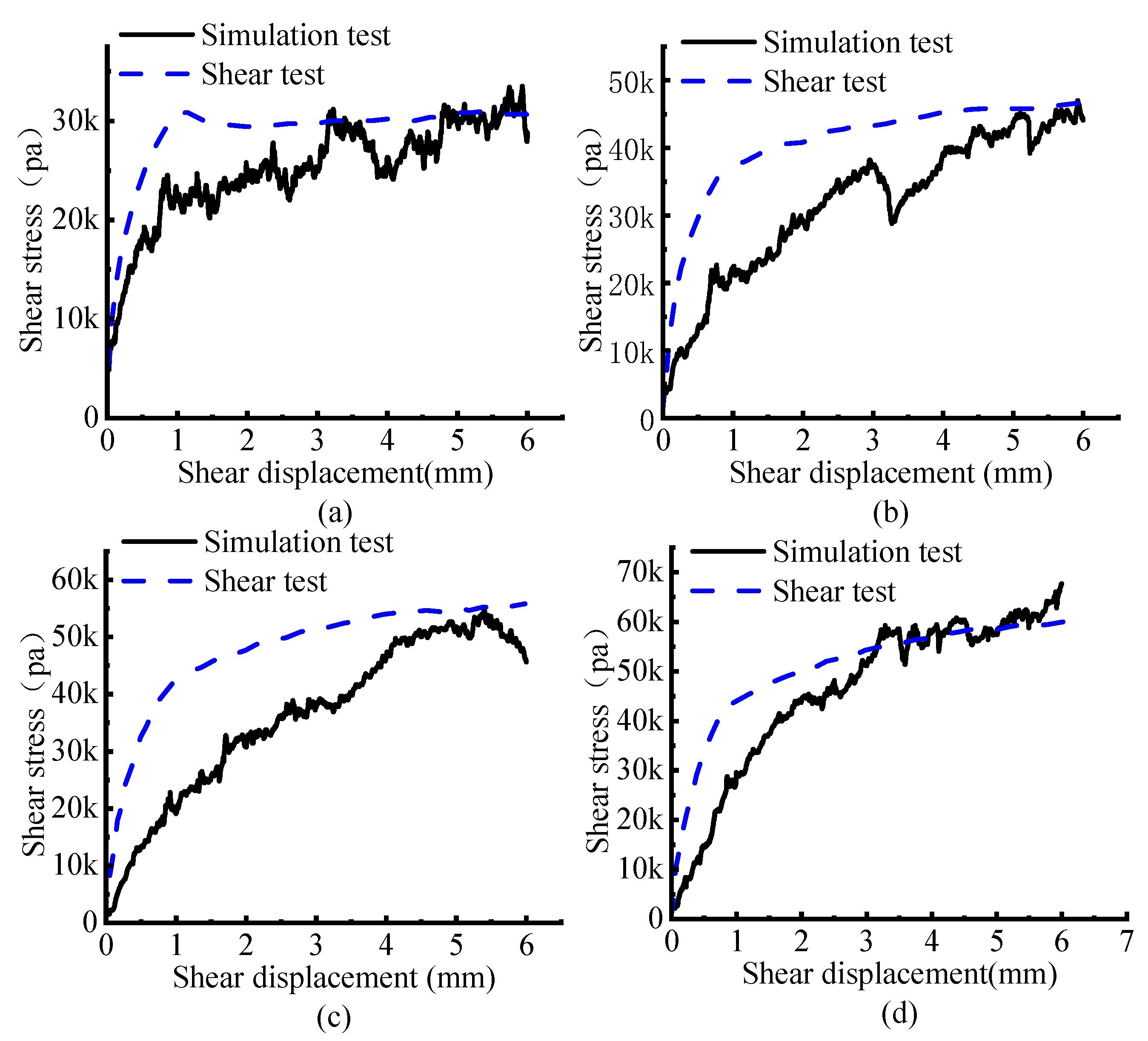
2.5. Calibration of Soil Pollutants
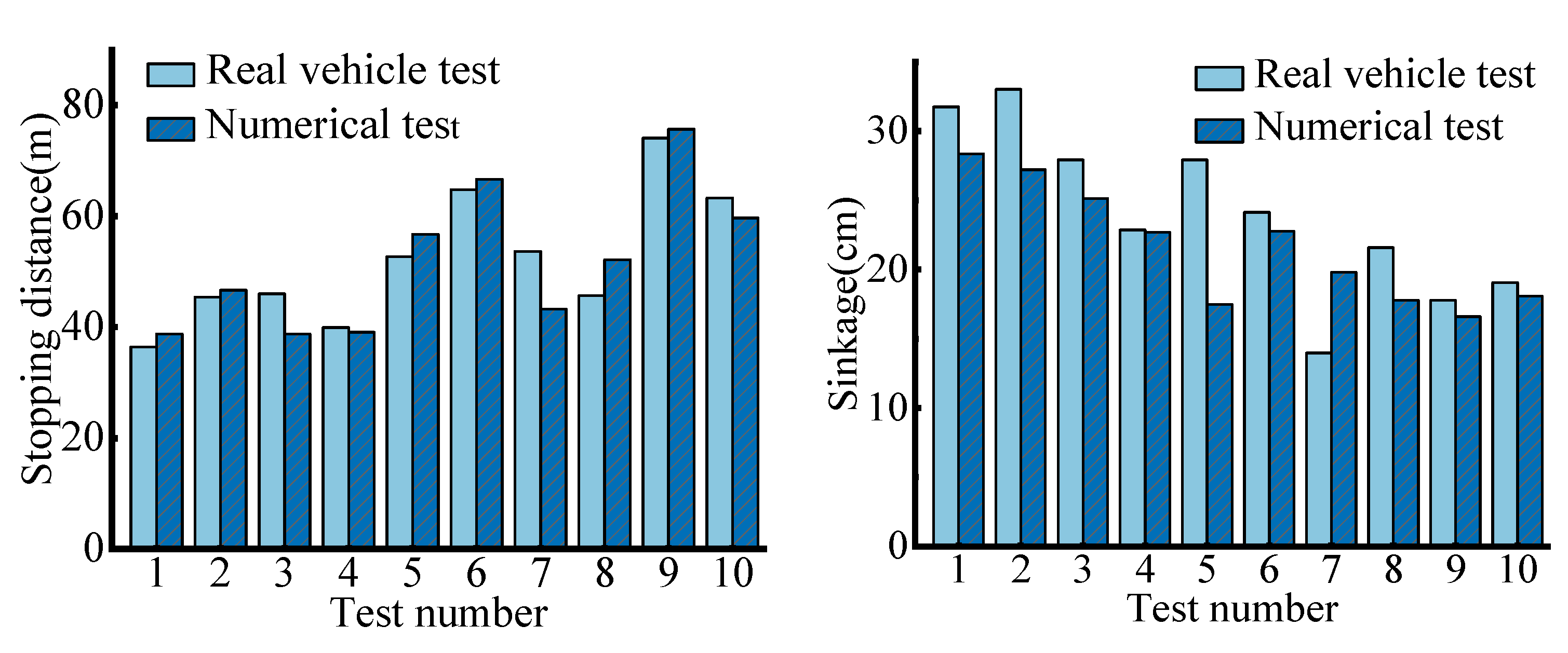
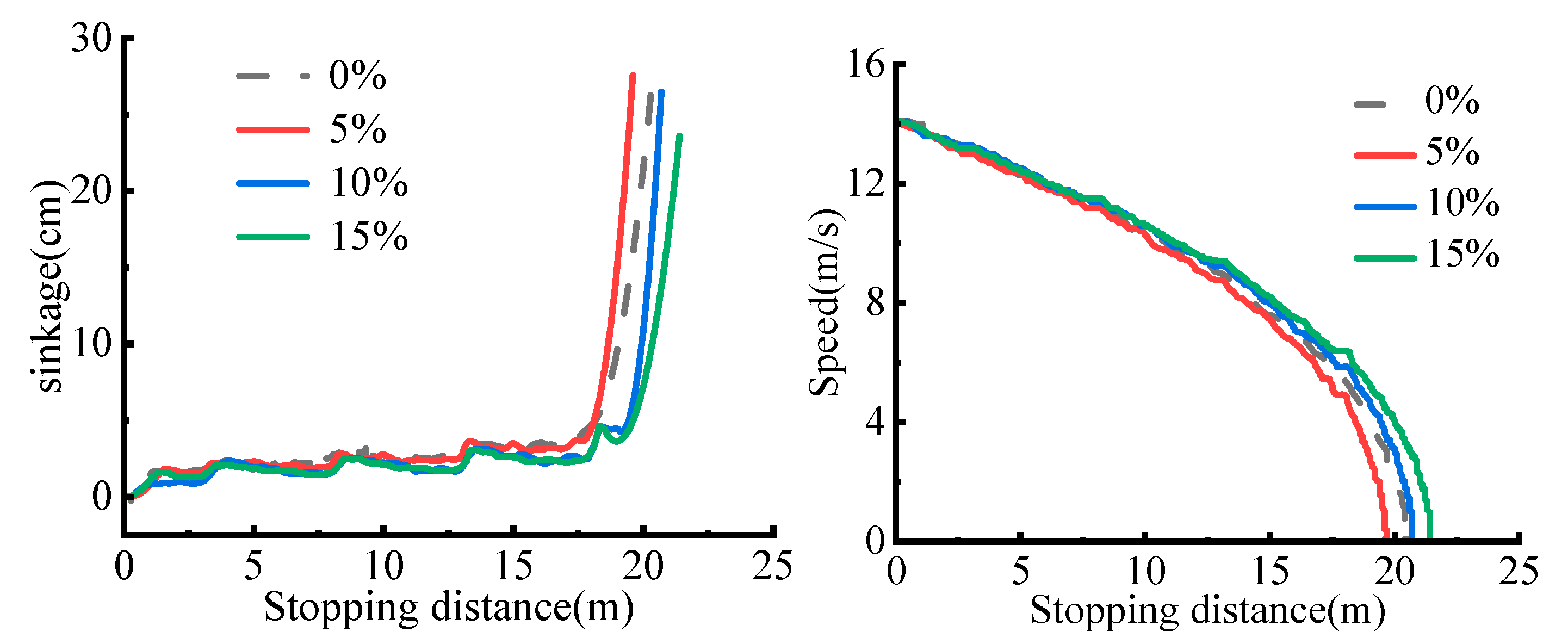
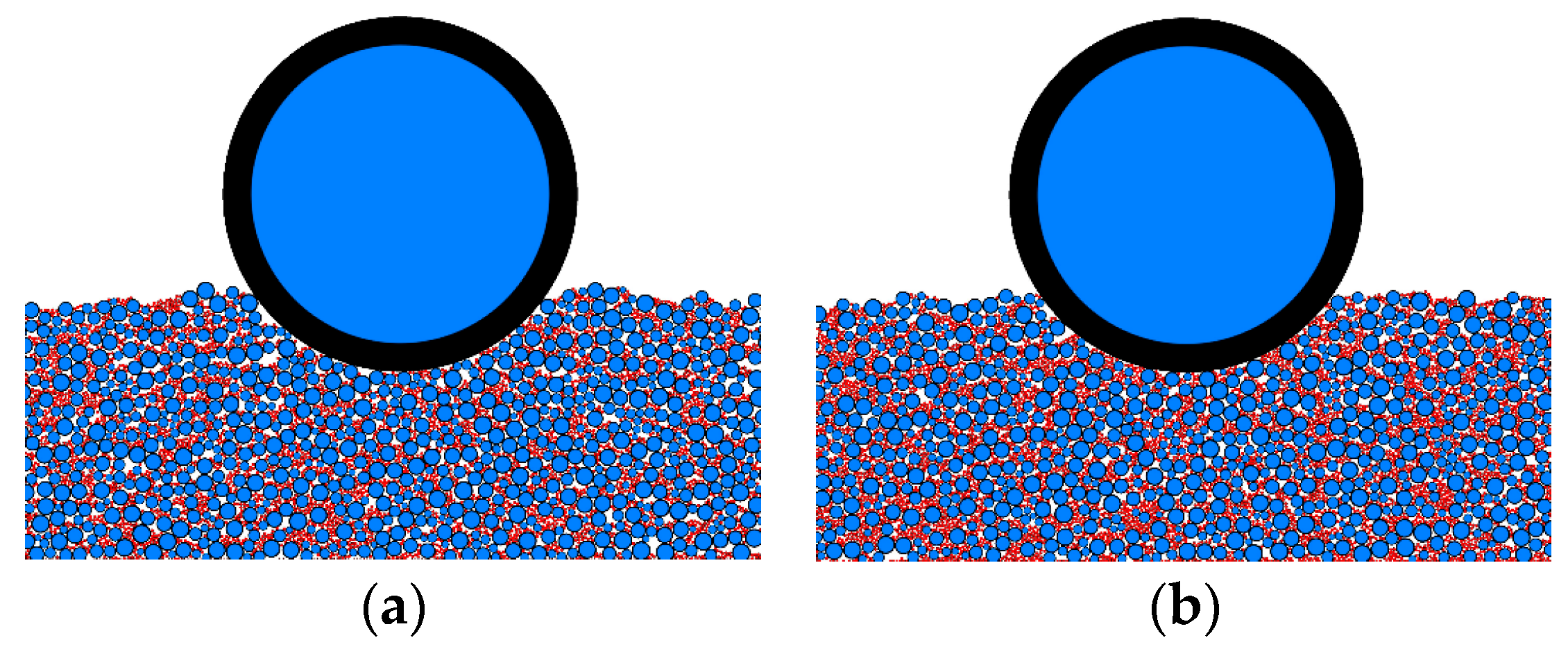
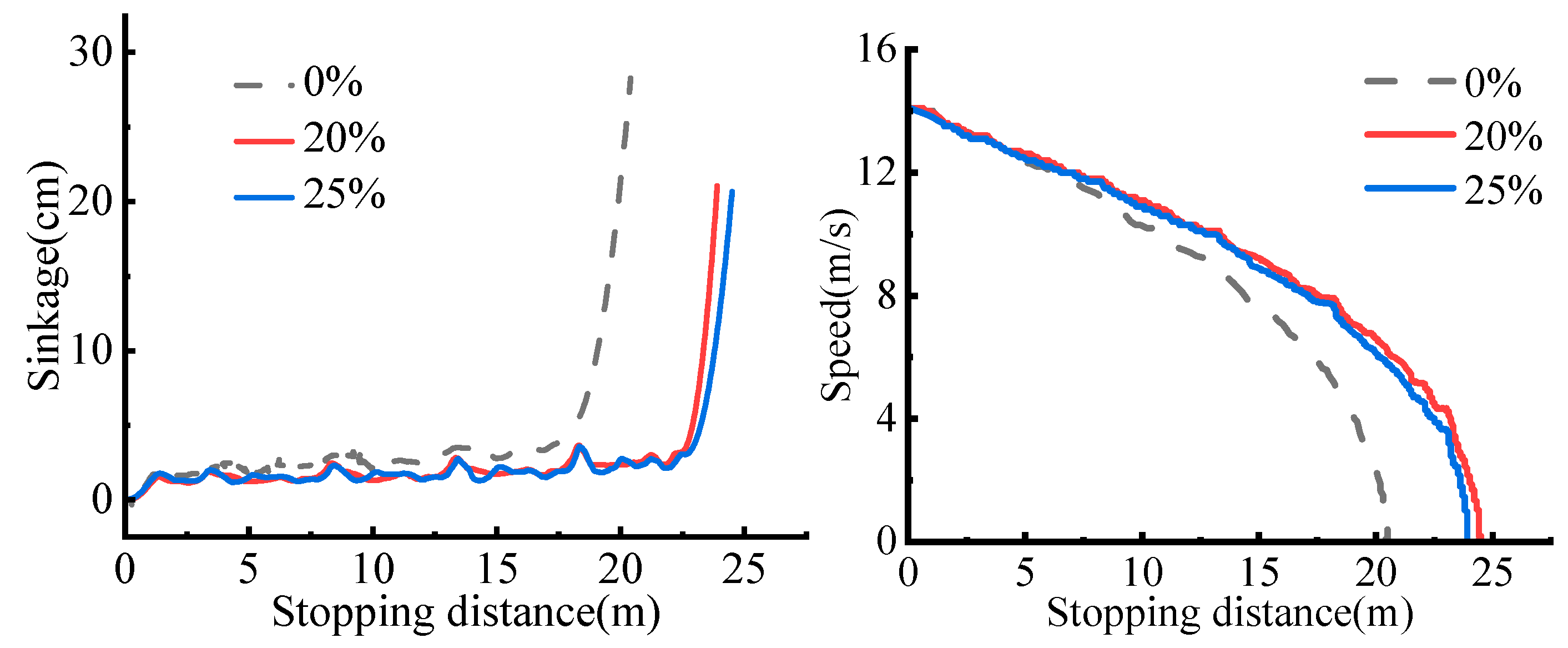
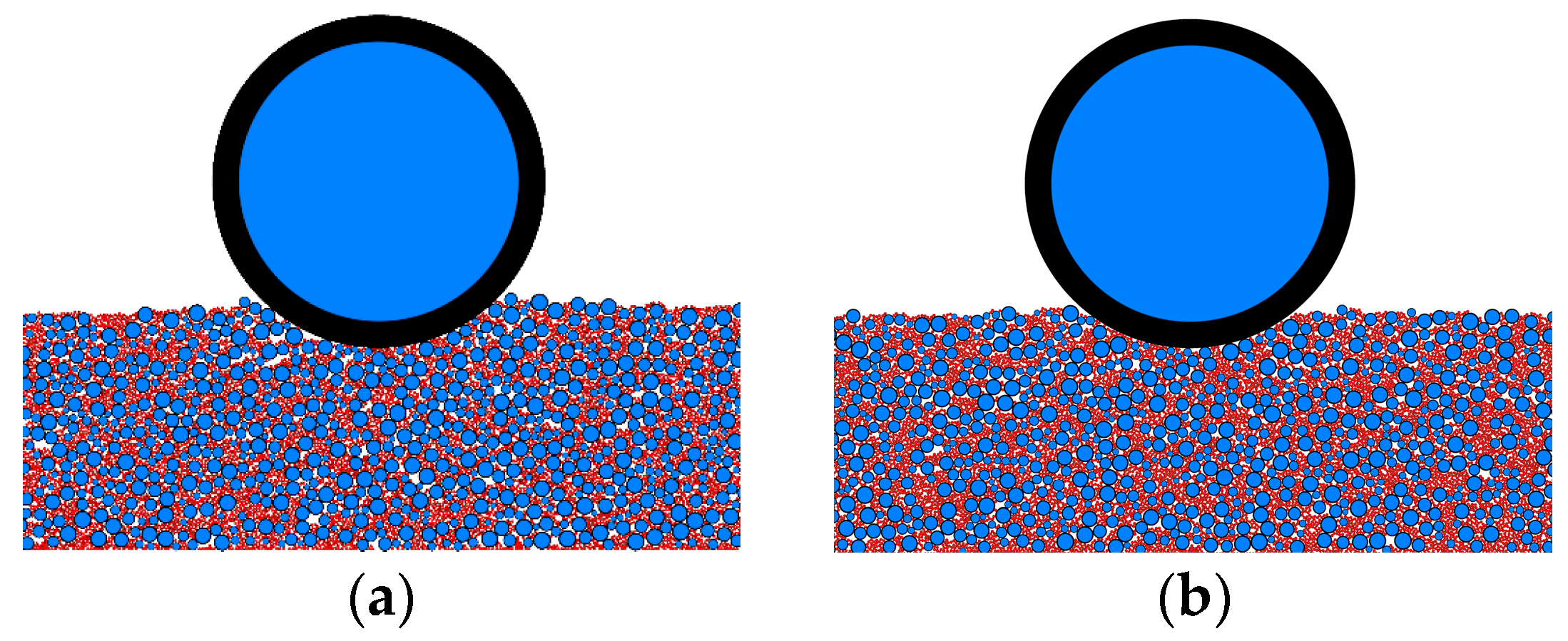
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- World Health Organization. Fact Sheets on Sustainable Development Goals: Health Targets, Road Safety; WHO: Copenhagen, Denmark, 2017. [Google Scholar]
- United Nations Conference on Trade and Development. Road Safety Considerations in Support of the 2030 Agenda for Sustainable Development; United Nations: New York, NY, USA, 2017. [Google Scholar]
- European Comission. Towards a Sustainable Europe by 2030; European Comission: Brussels, Belgium, 2019. [Google Scholar]
- Al-Qadi, I.L.; Rivera-Ortiz, L.A. Use of Gravel Properties to Develop Arrester Bed Stopping Model. Transp. Eng. J. ASCE 1991, 117, 566–584. [Google Scholar] [CrossRef]
- Al-Qadi, I.L.; Rivera-Ortiz, L.A. Laboratory testing of river gravel used in arrester beds. J. Test. Eval. 1991, 19, 280–291. [Google Scholar]
- Mateo-Ortiz, D.; Méndez, R. Microdynamic analysis of particle flow in a confined space using DEM: The feed frame case. Adv. Powder Technol. 2016, 27, 1597–1606. [Google Scholar] [CrossRef]
- Wang, C.K.; Chung, J.T.; Lin, Y.L. Dem Measurements of A Gravel-Bed Surface Using Two Scales of Images. Photogramm. Rec. 2015, 30, 387–401. [Google Scholar] [CrossRef]
- Indraratna, B.; Ngo, N.T.; Rujikiatkamjorn, C.; Sloan, S.W. Coupled discrete element–finite difference method for analysing the load-deformation behaviour of a single stone column in soft soil. Comput. Geotechnics. 2015, 63, 267–278. [Google Scholar] [CrossRef]
- Nishiyama, K.; Nakashima, H.; Yoshida, T.; Shimizu, H.; Miyasaka, J.; Ohdoi, K. FE-DEM with interchangeable modeling for off-road tire traction analysis. J. Terramech. 2018, 78, 15–25. [Google Scholar] [CrossRef]
- Nishiyama, K.; Nakashima, H.; Shimizu, H.; Miyasaka, J.; Ohdoi, K. 2D FE–DEM analysis of contact stress and tractive performance of a tire driven on dry sand. J. Terramech. 2017, 74, 25–33. [Google Scholar] [CrossRef]
- Nishiyama, K.; Nakashima, H.; Yoshida, T.; Ono, T.; Shimizu, H.; Miyasaka, J.; Ohdoi, K. 2D FE–DEM analysis of tractive performance of an elastic wheel for planetary rovers. J. Terramech. 2016, 64, 23–35. [Google Scholar] [CrossRef]
- Zhao, X.; Liu, P.; Yu, Q.; Shi, P. On the Effective Speed Control Characteristics of a Truck Escape Ramp Based on the Discrete Element Method. IEEE Access 2019, 7, 80366–80379. [Google Scholar] [CrossRef]
- Liu, P.; Yu, Q.; Zhao, X.; Shi, P. Discrete Element Analysis of the Reconstruction Method for Randomly Shaped Pebbles. IEEE Access 2019, 7, 137317–137329. [Google Scholar] [CrossRef]
- Liu, P.; Yu, Q.; Zhao, X.; Zhou, C.; Shi, P. Three-dimensional discrete element modeling of the irregularly shaped pebbles used in a truck escape ramp. Comput. Part. Mech. 2019, 7, 479–490. [Google Scholar] [CrossRef]
- Greto, K.; Easa, S.M. Reliability-based design of truck escape ramps. Can. J. Civ. Eng. 2020, 47, 395–404. [Google Scholar] [CrossRef]
- Qin, P.; Wu, F.; Wu, D.; Zhnag, S. Three-dimensional discrete element simulation of the runaway vehicle deceleration process on the arrester bed of truck escape ramps. Sci. Prog. 2020, 103, 003685042094089. [Google Scholar] [CrossRef] [PubMed]
- Ambrož, M.; Trajkovski, J.; Kunc, R. Decelerations of passenger vehicles on gravel arrester beds. Sustainability 2020, 12, 1761. [Google Scholar] [CrossRef]
- Capuano, F.A.; Heymsfield, E.; Li, N. Alternative arresting system design for truck escape ramps. Int. J. Crashworthiness 2018, 23, 618–626. [Google Scholar] [CrossRef]
- Zhao, C.L.; Zang, M.Y. Alternately Moving Road Method for the FEM/DEM Simulation of Tire-Sand Interactions. In Proceedings of the ICCM, Cambridge, UK, 28–30 July 2014. [Google Scholar]
- Wei, S.; Zhang, W.; Xiao, S.; Chen, K. Mechanical Properties of Saturated Clay under Effect of over Consolidation Ratio. J. Chongqing Jiaotong Univ. 2017, 36, 64–70. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Relative Densities | Confining Pressures (kPa) | Peak Stress (kPa) | Peak Strain (%) | Volumetric Strain (%) | |||
|---|---|---|---|---|---|---|---|
| Real Data | Simulation Data | Real Data | Simulation Data | Real Data | Simulation Data | ||
| 13% | 69.0 | 294.3 | 274.16 | 4.4 | 6.66 | −0.225 | 0.15 |
| 137.9 | 480.7 | 512.25 | 5.5 | 6.05 | −0.290 | 0.197 | |
| 206.9 | 571.1 | 743.62 | 6.3 | 7.55 | −0.86 | 0.194 | |
| 45% | 69.0 | 324.3 | 261.3 | 3.9 | 6.38 | 0.105 | 0.11 |
| 137.9 | 659.3 | 488.87 | 5.5 | 6.56 | 0.13 | 0.19 | |
| 206.9 | 701.7 | 742.43 | 5.8 | 6.75 | 0.19 | 0.22 | |
| 80% | 69.0 | 367.8 | 316.84 | 3.3 | 4.83 | 0.615 | 0.14 |
| 137.9 | 772.4 | 668.77 | 4.1 | 5.12 | 0.65 | 0.23 | |
| 206.9 | 986.1 | 999.71 | 5.3 | 7.48 | 2.17 | 1.46 | |
| Average Particle Size (cm) | Particle Density (kg/m3) | Normal Stiffness (N/m) | Tangential Stiffness (N/m) | Friction Coefficient |
|---|---|---|---|---|
| 2 | 2630 | 3 × 106 | 2.45 × 106 | 30 |
| Wheel Radius (m) | Normal Stiffness (N/m) | Tangential Stiffness (N/m) | Friction Coefficient |
|---|---|---|---|
| 0.55 | 6 × 106 | 1.39 × 107 | 0.5 |
| Effective Modulus | Stiffness Ratio | Tensile Strength (pa) | Shear Strength (pa) | Friction Coefficient |
|---|---|---|---|---|
| 7.8 × 107 | 3 | 2.3 × 106 | 1.3 × 106 | 25 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, P.; Li, Z.; Li, H.; Huang, J.; Wang, G. Influence of Aggregate Pollution in Truck Escape Ramps on Stopping Distance of Uncontrolled Vehicles. Sustainability 2022, 14, 11593. https://doi.org/10.3390/su141811593
Qin P, Li Z, Li H, Huang J, Wang G. Influence of Aggregate Pollution in Truck Escape Ramps on Stopping Distance of Uncontrolled Vehicles. Sustainability. 2022; 14(18):11593. https://doi.org/10.3390/su141811593
Chicago/Turabian StyleQin, Pinpin, Ziming Li, Hao Li, Junming Huang, and Guiqi Wang. 2022. "Influence of Aggregate Pollution in Truck Escape Ramps on Stopping Distance of Uncontrolled Vehicles" Sustainability 14, no. 18: 11593. https://doi.org/10.3390/su141811593
APA StyleQin, P., Li, Z., Li, H., Huang, J., & Wang, G. (2022). Influence of Aggregate Pollution in Truck Escape Ramps on Stopping Distance of Uncontrolled Vehicles. Sustainability, 14(18), 11593. https://doi.org/10.3390/su141811593