
Modeling and Analysis of Electric Vehicle User Behavior Based on Full Data Chain Driven


Abstract
:1. Introduction
1.1. Motivation
1.2. Literature Survey
- The single characteristic of EVs has been carefully explored in the above-mentioned studies. However, it is challenging to establish a comprehensive EV user behavior profile without fully considering EVs’ dynamic traveling and random charging behaviors.
- The established models and mining results of the above studies show poor applicability due to the high redundancy and heterogeneity of the raw data. Moreover, it lacks an EV modeling method that can support cross-platform and cross-region comparative analysis.
1.3. Contributions
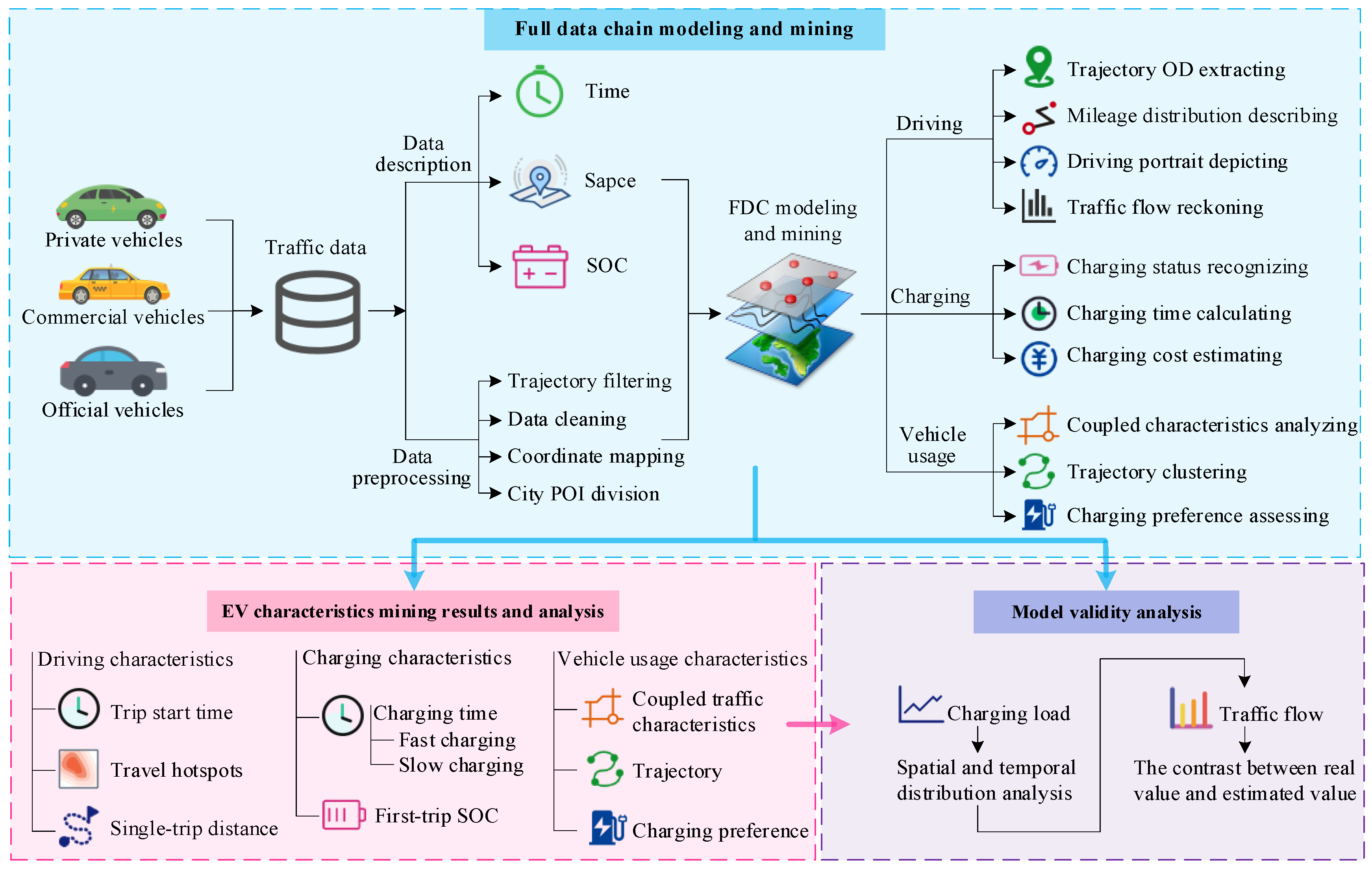
- This paper proposes an FDC-based EV behavior modeling method from the perspective of time, space, and energy. The proposed method adopts data-driven approaches to uncover the deeper characteristics of EVs with as few data dimensions as possible. It provides a standardized and efficient way for FDC modeling and city-level EV profiling in different regions;
- From the perspective of EV owners, charging stations, and transportation networks, this paper establishes a travel portrait of city-level EV users. By analyzing the FDCs of multi-type vehicles (i.e., PREVs, CEVs, and OEVs) in multiple scenarios (i.e., date types, functional area types), EV owners’ driving, charging, and vehicle usage characteristics are thoroughly mined;
- Based on the data mining results, the validity and applicability of the proposed model are verified through the analysis of the EV charging load and the comparison of road flow. In this way, the validity of the proposed method is demonstrated in a closed loop. It provides a data source and user behavior model for EV charging control and navigation.
1.4. Paper Organization
2. FDC-Based EV Modeling and Analysis Architecture
- (1)
- Firstly, determine the regional scope. DataMap is introduced for POI retrieval, and the city functional areas are divided based on the POI information;
- (2)
- Secondly, EV travel data is extracted and mined to describe user driving characteristics. Combined with the expanded charging station information, the EV charging state is identified, and the charging time and charging power are calculated as the basis of charging characteristics mining for users;
- (3)
- Then, the driving and charging characteristics are integrated to explore EV owners’ vehicle usage characteristics from coupled traffic characteristics, driving trajectory, and charging preference;
- (4)
- Finally, the charging load of the selected area is deduced based on the FDC mining results, and the effectiveness of the proposed model is verified by a comparative analysis of road traffic flow.
3. FDC-Based Modeling and Mining
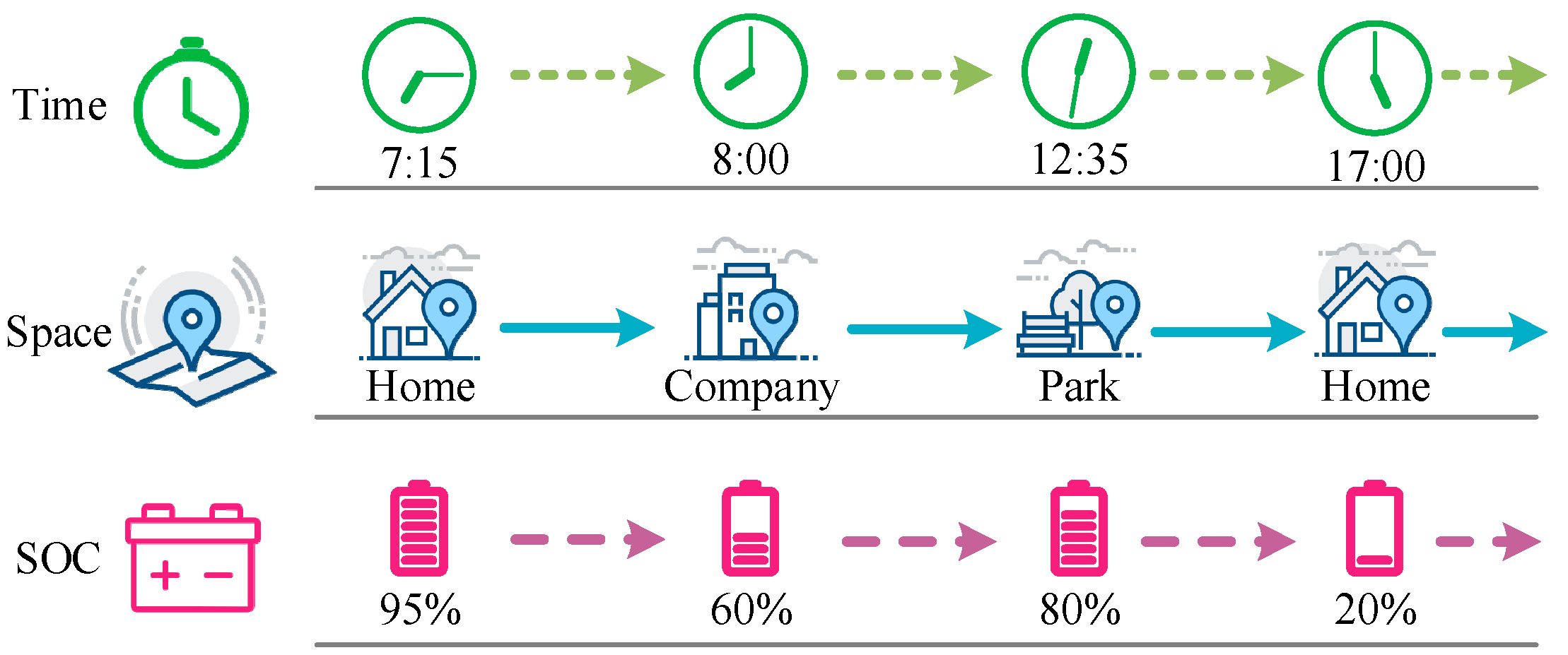
3.1. Data Description and Pre-Processing
3.1.1. Data Description
3.1.2. Data Pre-Processing
- (1)
- Trajectory filtering: the original trajectory may fluctuate sharply due to irresistible factors such as GPS signal interferences. The road network information in Chongqing is obtained via OpenStreetMap, and the GPS coordinates are mapped and filtered to improve the accuracy of the coordinates [27];
- (2)
- Data cleaning: for travel data, exclude data with instant GPS missing, travel distance less than 0.5 km, and instant SOC less than or equal to 0%. For parking data, exclude data with instant GPS missing and instant SOC greater than 100%;
- (3)
- Coordinate mapping: both data source and subsequent derivation process are based on the WGS-84 coordinate system. However, the DataMap (based on the GCJ-02 coordinate system) is applied for electronic map drawing in this paper, so the coordinate conversion is required to establish the mapping relationship between two coordinate trajectory sequences [2];
- (4)
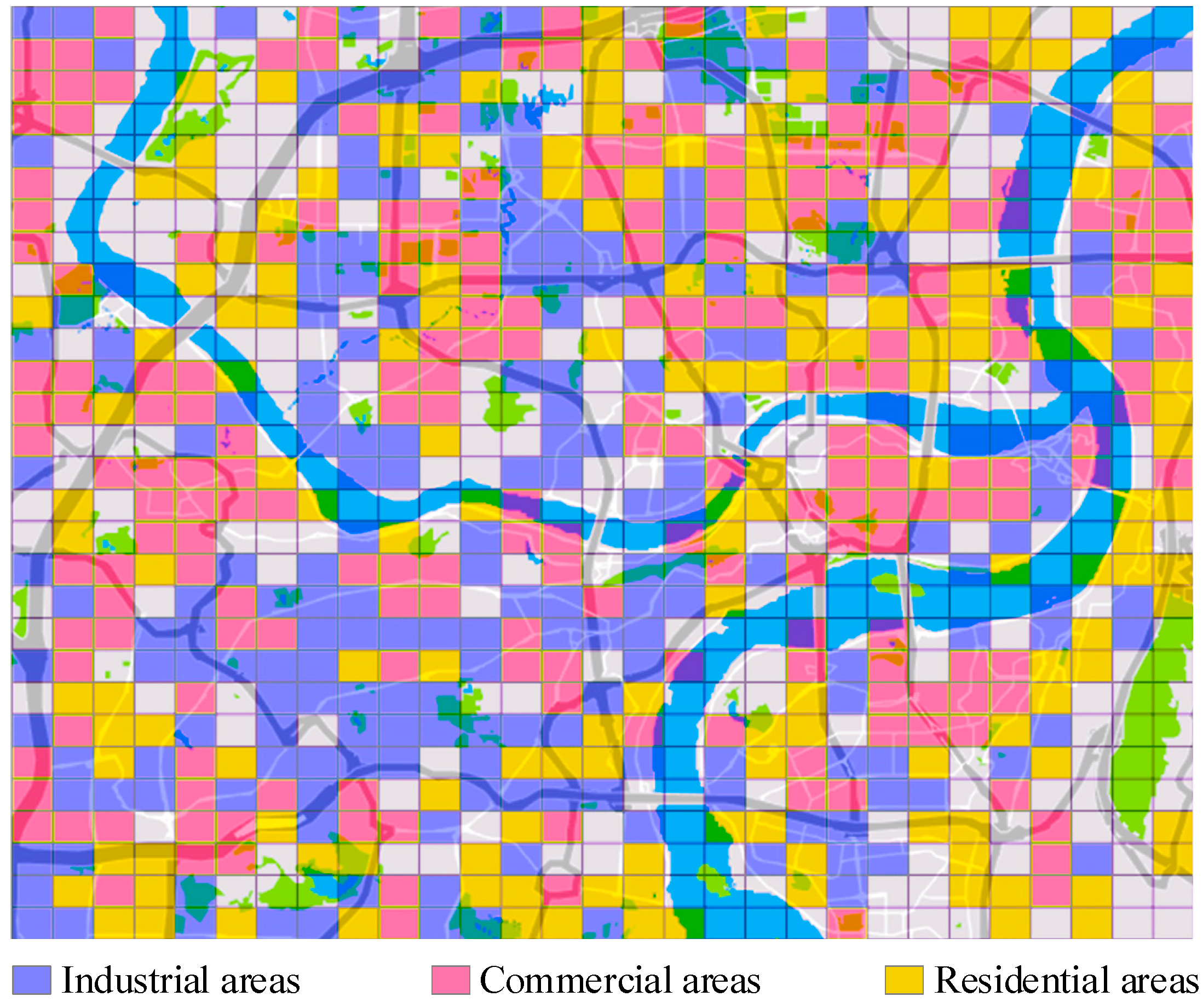
- Urban POI division: considering the regional economy and the activities of experimental vehicles, we select the range of longitude (east): 106.440 145~106.604 805, latitude (north): 29.503 586~29.621 343 as the research scope. The circumference is 58.04 km, and the area is 208.52 km2. The DataMap is utilized to retrieve the various types of POI points in the designated area, and the method proposed in [28] is adopted to classify urban areas. The POI partition results are obtained as shown in Figure 3. Among the functional areas, industrial, commercial, and residential areas accounted for 37.73%, 36.57%, and 26.70%, respectively.
3.2. Driving Characteristics Mining
3.2.1. Trajectory OD Point Extracting
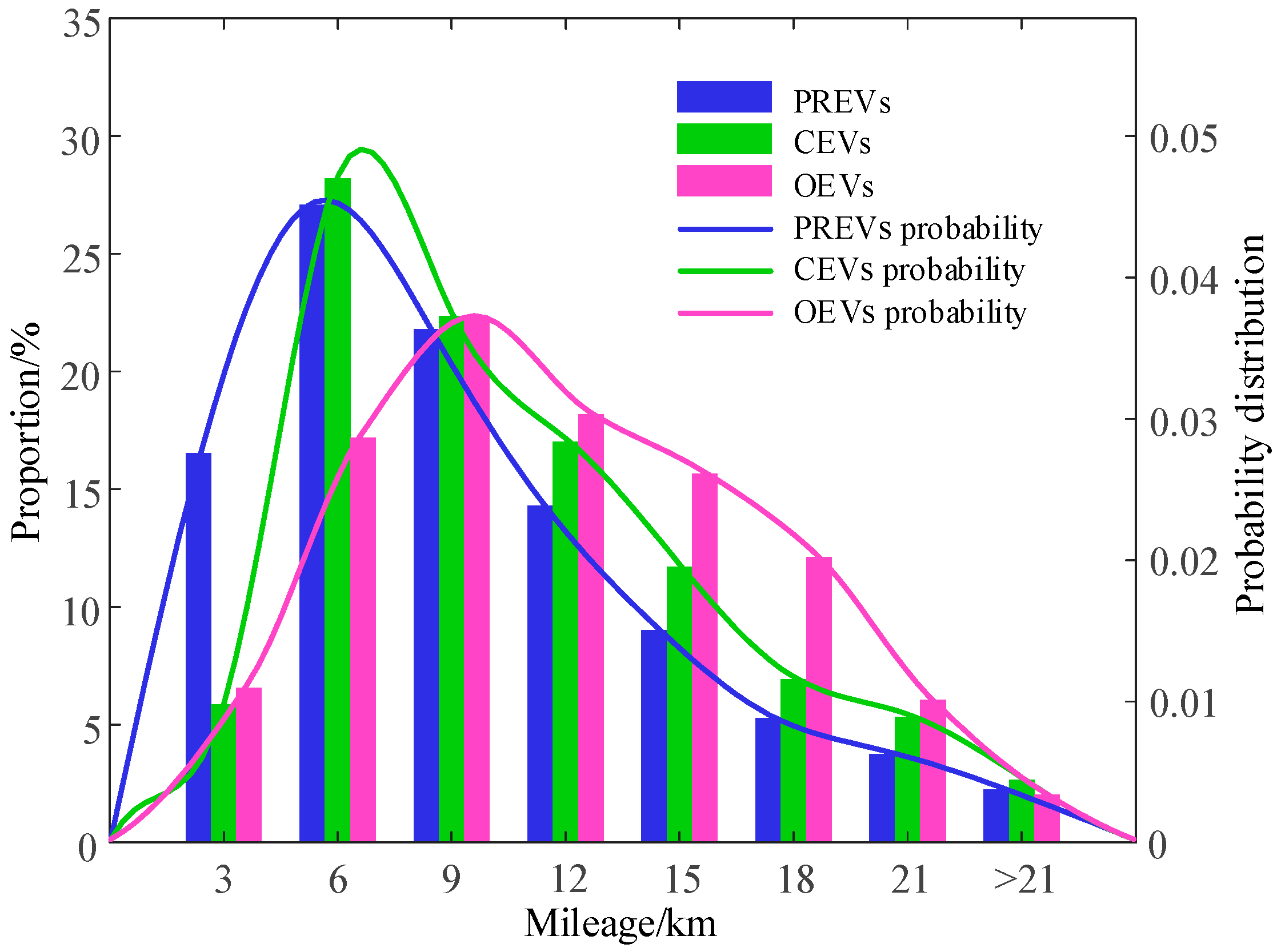
3.2.2. Mileage Distribution Describing
3.2.3. Driving Portrait Drawing
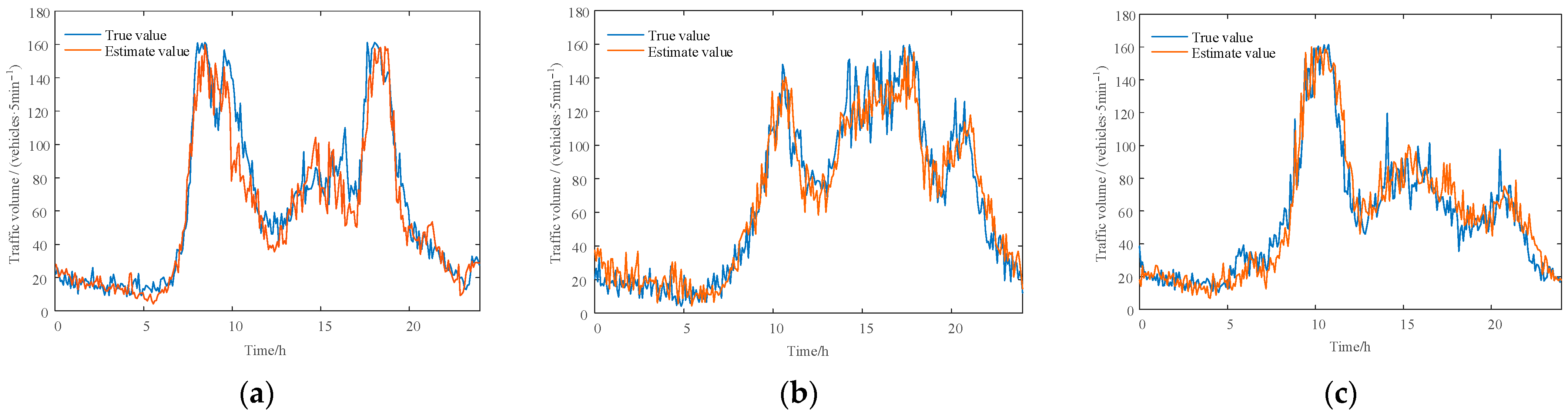
3.2.4. Traffic Flow Reckoning
3.3. Charging Characteristics Mining
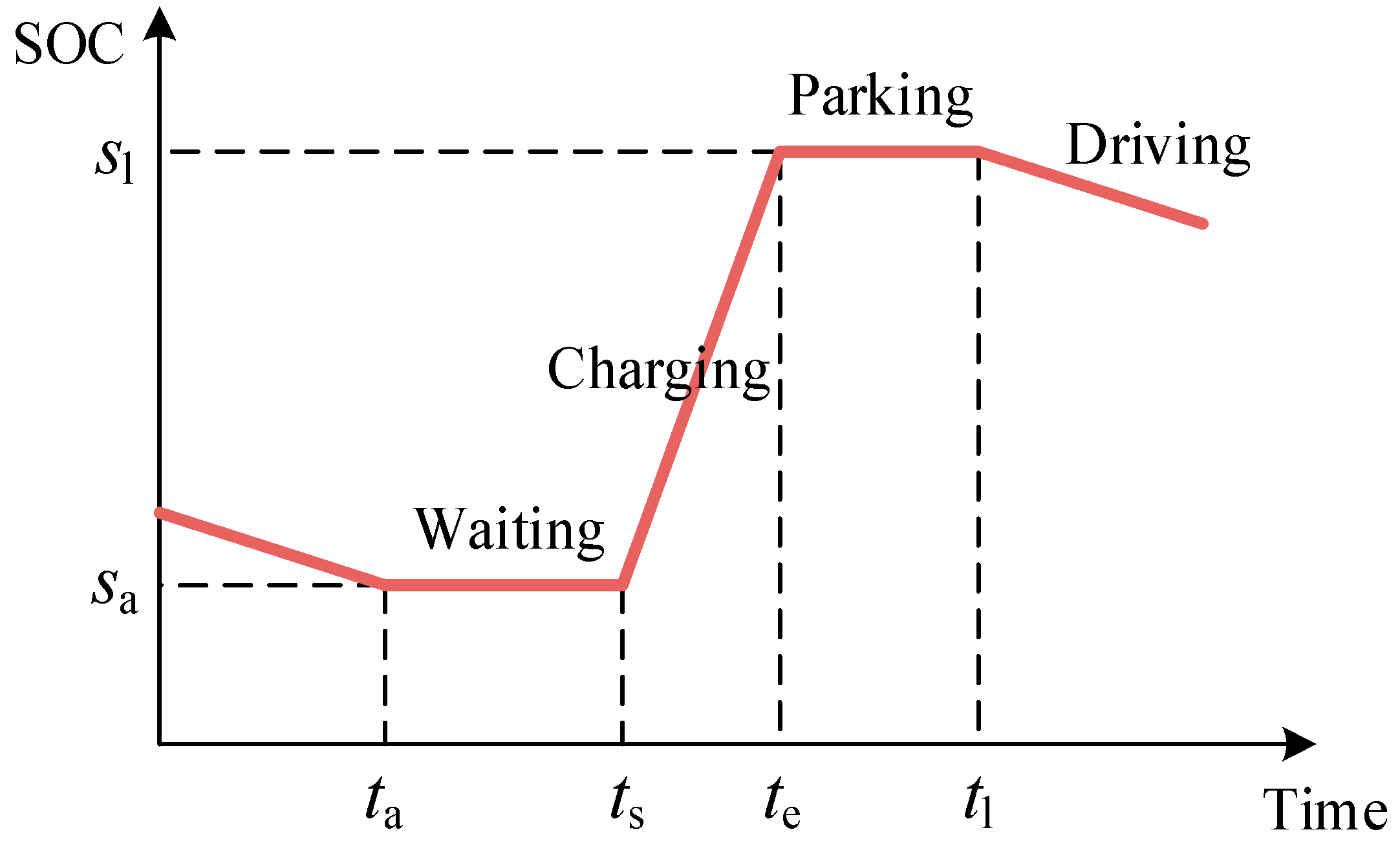
3.3.1. Charging States Recognizing
3.3.2. Charging Time Calculating
3.3.3. Charging Cost Statistics
3.4. Vehicle Usage Characteristics Mining
3.4.1. Coupled Traffic Characteristics Analyzing
3.4.2. Travel Trajectory Clustering
3.4.3. Charging Preference Evaluating
4. Modeling Results and Analysis of EV User Characteristics
4.1. EV Driving Characteristics
4.2. EV Charging Characteristics
4.3. EV Vehicle Usage Characteristics
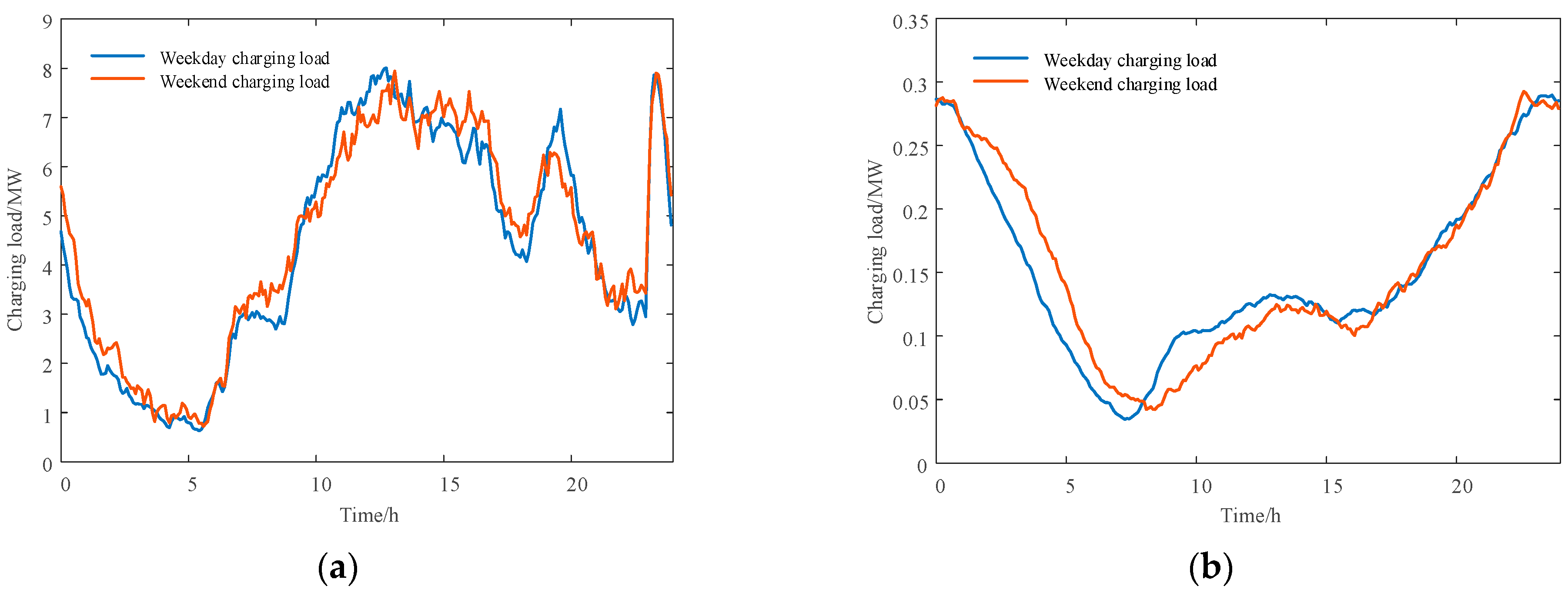
4.4. Effectiveness of Behavior Modeling
5. Discussion
6. Conclusions
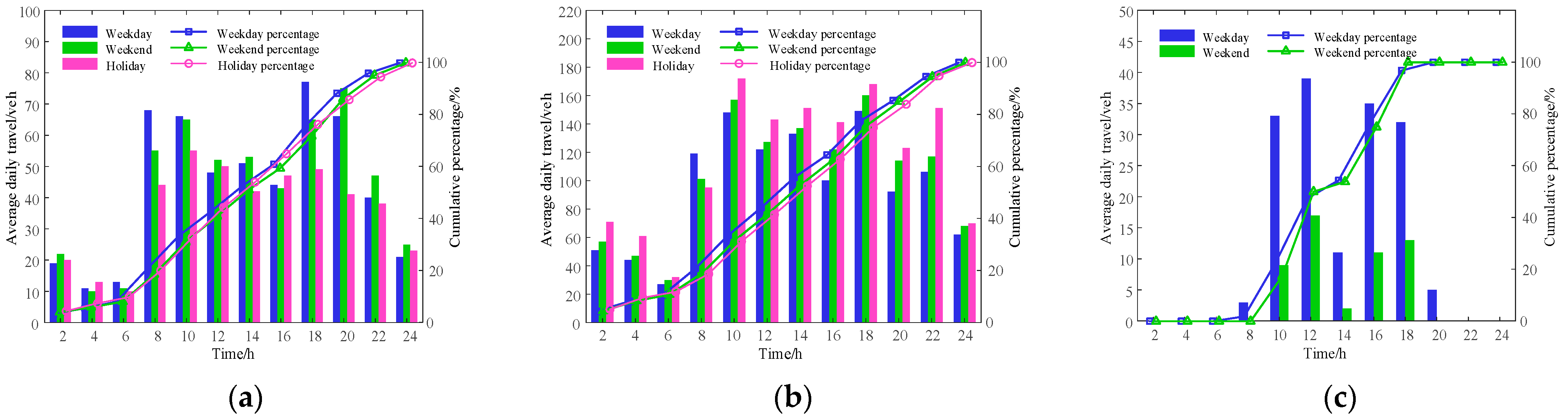
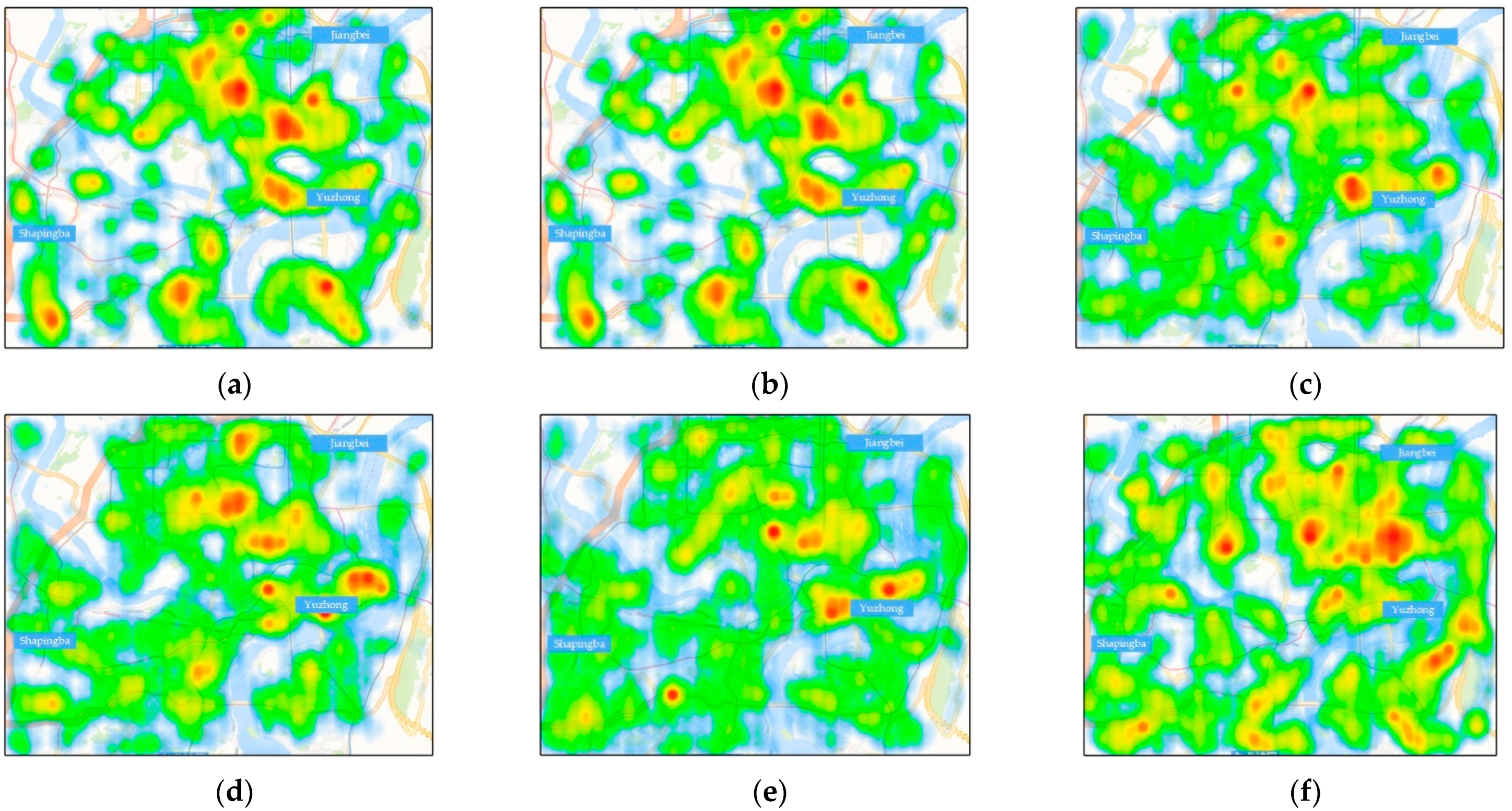
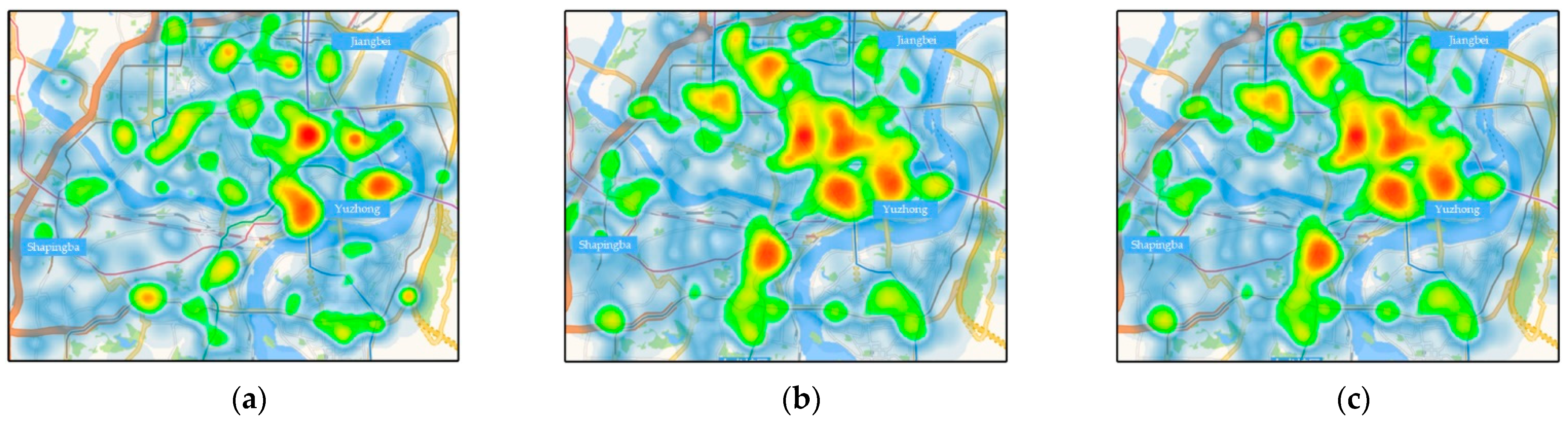
- Regarding driving characteristics, travel time distributions under different dates are unbalanced, with PREVs and CEVs being the most significant. The travel demand of CEVs on holidays is 19.51% higher than that on weekdays, whereas the demand of PREVs on holidays is 17.56% lower than that on weekdays. There are spatial shifts in travel hotspots at different times, and the transfer characteristics of residential and industrial areas are most apparent during the morning and evening travel peaks. In contrast, the commercial areas show high travel enthusiasm at all times of the day;
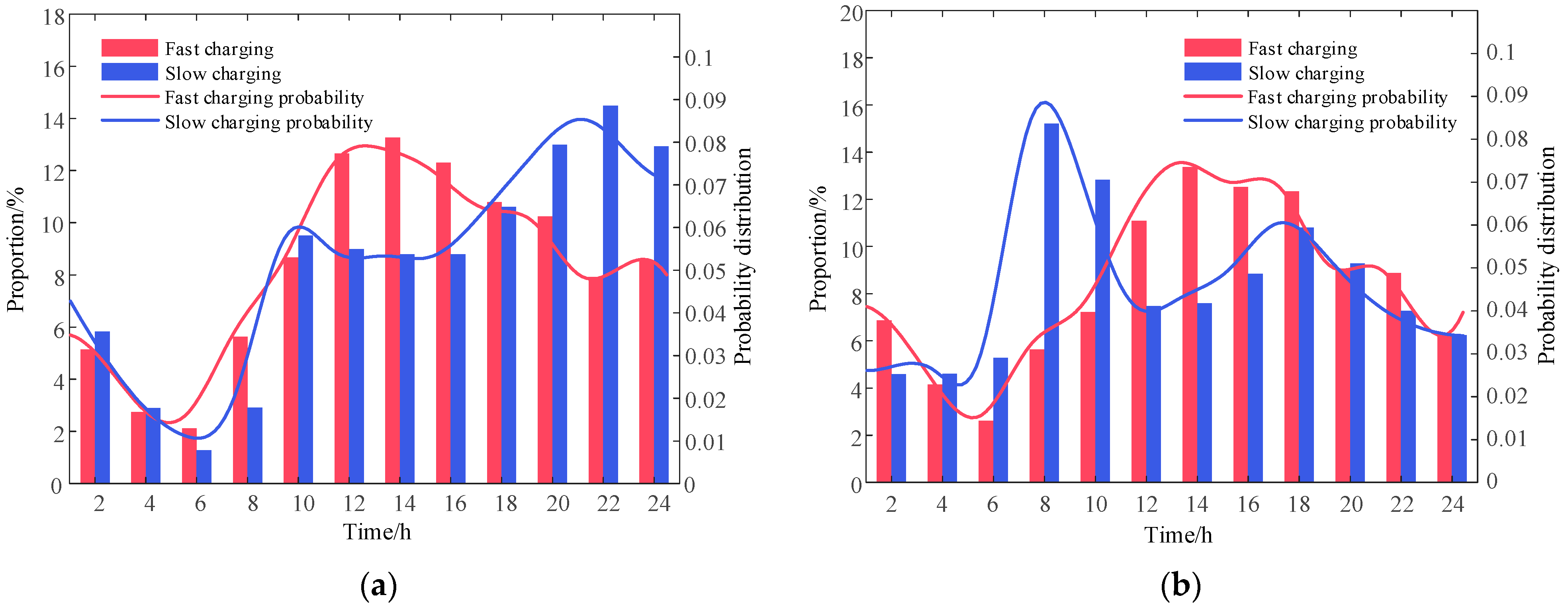
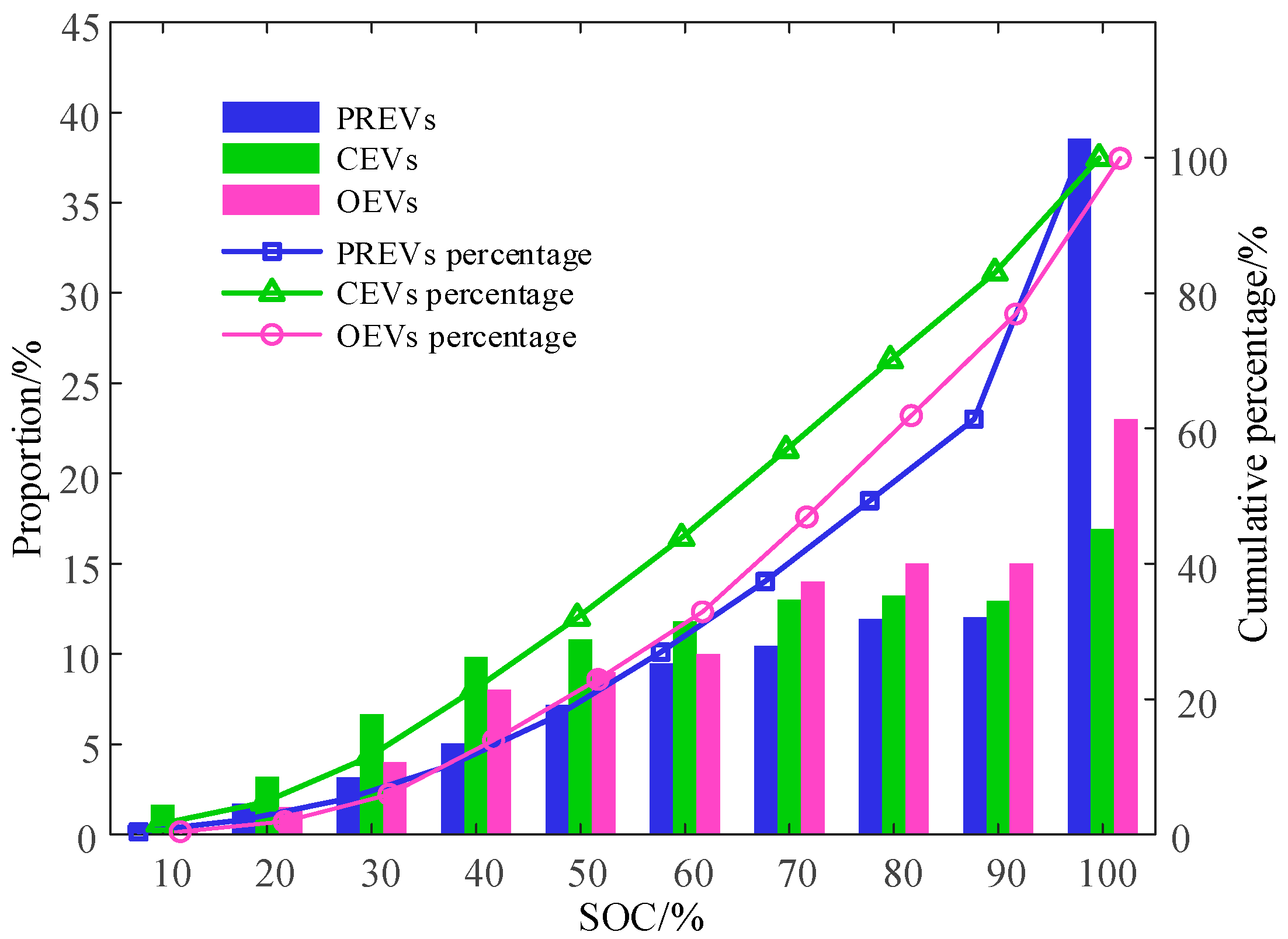
- Regarding charging characteristics, fast-charging users primarily access charging during the daytime, whereas slow-charging users mostly choose to charge at night when the electricity price is lower and finish charging in the morning when they go to work. Slow-charging users who finish charging in the morning peak period accounted for 28.05%. Among the three types of vehicles, PREV users are more conservative about the battery level. They often stop charging and start their journey when the batteries are fully charged;
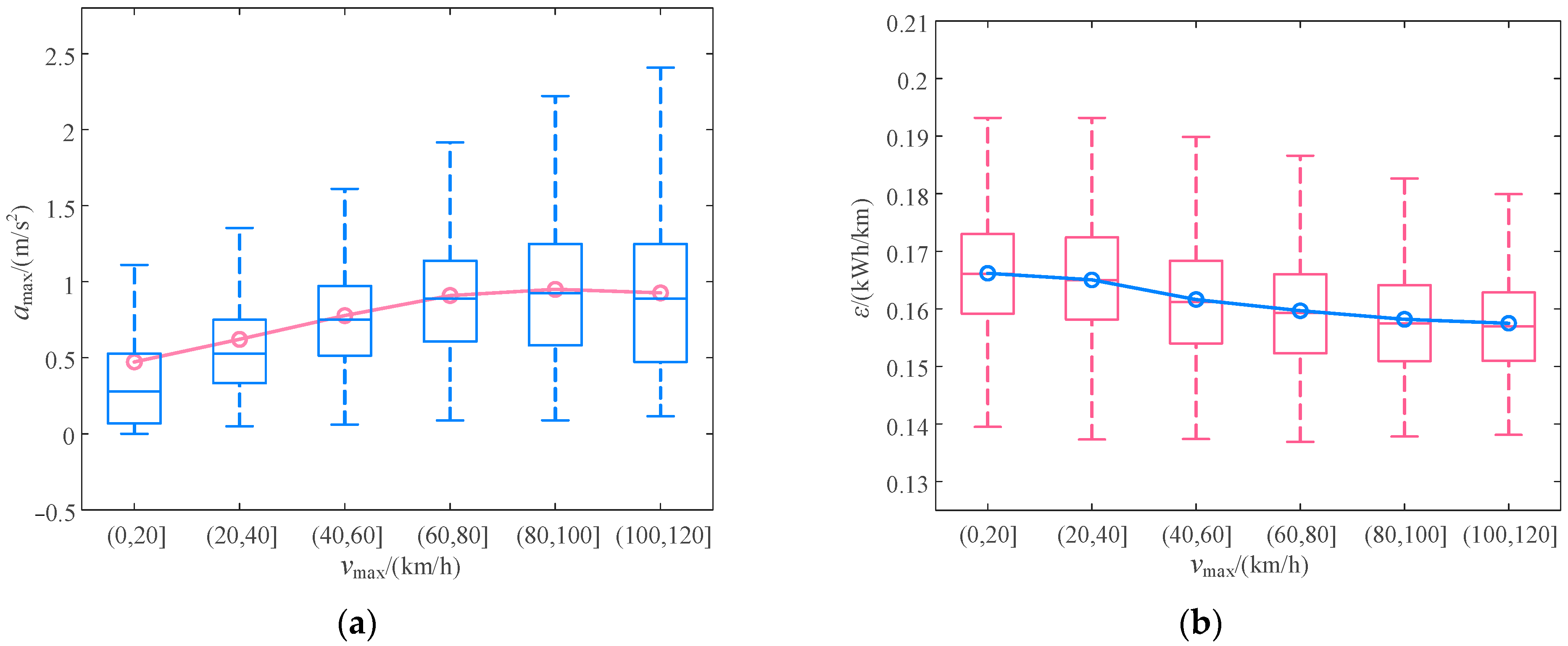
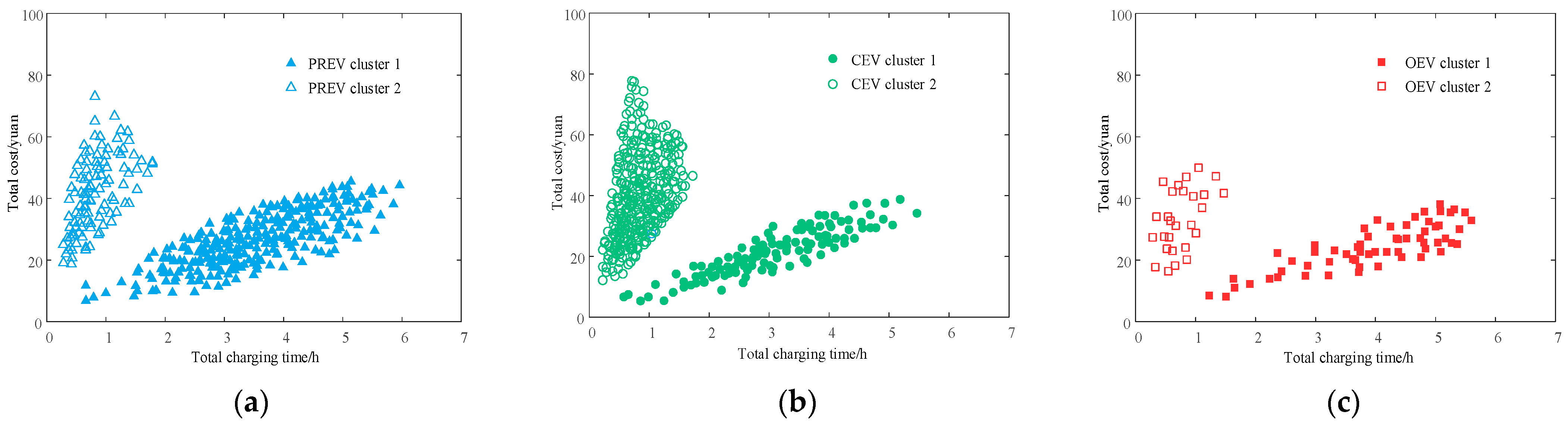
- Regarding vehicle usage characteristics, we analyze the coupled traffic characteristics, route selection habits, and charging preferences. We believe that there is a negative correlation between road traffic safety and energy consumption level. Moreover, the results show that CEVs have the widest choice of routes, and they are also more inclined to choose fast charging, whereas PREVs and OEVs have relatively fixed route patterns, and they are more inclined to slow charging.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ji, Z.; Huang, X. Plug-in electric vehicle charging infrastructure deployment of China towards 2020: Policies, methodologies, and challenges. Renew. Sustain. Energy Rev. 2018, 90, 710–727. [Google Scholar] [CrossRef]
- Xing, Q.; Chen, Z.; Zhang, Z.; Xu, X.; Zhang, T.; Huang, X.; Wang, H. Urban Electric Vehicle Fast-Charging Demand Forecasting Model Based on Data-Driven Approach and Human Decision-Making Behavior. Energies 2020, 13, 1412. [Google Scholar] [CrossRef] [Green Version]
- In 2020, There Are 33.28 Million Newly Registered Motor Vehicles in China, Including 4.92 Million New Energy Vehicles. Available online: https://app.mps.gov.cn/gdnps/pc/content.jsp?id=7647257 (accessed on 7 January 2021).
- International Energy Agency. Global EV Outlook 2021; International Energy Agency: Paris, France, 2021. [Google Scholar]
- Zhang, H.; Hu, Z.; Xu, Z.; Song, Y. An Integrated Planning Framework for Different Types of PEV Charging Facilities in Urban Area. IEEE Trans. Smart Grid 2016, 7, 2273–2284. [Google Scholar] [CrossRef]
- Infante, W.; Ma, J. Coordinated Management and Ratio Assessment of Electric Vehicle Charging Facilities. IEEE Trans. Ind. Appl. 2020, 56, 5955–5962. [Google Scholar] [CrossRef]
- Wang, J.; Bharati, G.R.; Paudyal, S.; Ceylan, O.; Bhattarai, B.P.; Myers, K.S. Coordinated Electric Vehicle Charging with Reactive Power Support to Distribution Grids. IEEE Trans. Ind. Inform. 2018, 15, 54–63. [Google Scholar] [CrossRef]
- Ji, C.; Yang, Q.; Ning, N.; Liu, Y.; Lyu, L. Mitigating Downward Reserve Deficiency of Power System via Coordinating EV Demand Response at Valley Period. IEEE Access 2020, 8, 112368–112378. [Google Scholar] [CrossRef]
- Chaudhari, K.S.; Kandasamy, N.K.; Krishnan, A.; Ukil, A.; Gooi, H.B. Agent-Based Aggregated Behavior Modeling for Electric Vehicle Charging Load. IEEE Trans. Ind. Inform. 2018, 15, 856–868. [Google Scholar] [CrossRef]
- Wang, M.; Ismail, M.; Zhang, R.; Shen, X.; Serpedin, E.; Qaraqe, K. Spatio-Temporal Coordinated V2V Energy Swapping Strategy for Mobile PEVs. IEEE Trans. Smart Grid 2018, 9, 1566–1579. [Google Scholar] [CrossRef]
- Pevec, D.; Babic, J.; Carvalho, A.; Ghiassi-Farrokhfal, Y.; Ketter, W.; Podobnik, V. A survey-based assessment of how existing and potential electric vehicle owners perceive range anxiety. J. Clean. Prod. 2020, 276, 122779. [Google Scholar] [CrossRef]
- Wang, Y.; Yao, E.; Pan, L. Electric vehicle drivers’ charging behavior analysis considering heterogeneity and satisfaction. J. Clean. Prod. 2021, 286, 124982. [Google Scholar] [CrossRef]
- Rautiainen, A.; Repo, S.; Jarventausta, P.; Mutanen, A.; Vuorilehto, K.; Jalkanen, K. Statistical Charging Load Modeling of PHEVs in Electricity Distribution Networks Using National Travel Survey Data. IEEE Trans. Smart Grid 2012, 3, 1650–1659. [Google Scholar] [CrossRef]
- Xia, Y.; Hu, B.; Xie, K.; Tang, J.; Tai, H.-M. An EV Charging Demand Model for the Distribution System Using Traffic Property. IEEE Access 2019, 7, 28089–28099. [Google Scholar] [CrossRef]
- Hilton, G.; Kiaee, M.; Bryden, T.; Dimitrov, B.; Cruden, A.; Mortimer, A. A Stochastic Method for Prediction of the Power Demand at High Rate EV Chargers. IEEE Trans. Transp. Electrif. 2018, 4, 744–756. [Google Scholar] [CrossRef] [Green Version]
- Arias, M.B.; Bae, S. Electric vehicle charging demand forecasting model based on big data technologies. Appl. Energy 2016, 183, 327–339. [Google Scholar] [CrossRef]
- Li, M.; Jia, Y.H.; Shen, Z.J.; He, F. Improving the electrification rate of the vehicle miles traveled in Beijing: A data-driven approach. Transp. Res. Part A Policy Pract. 2017, 97, 106–120. [Google Scholar] [CrossRef]
- Zhang, X.; Zou, Y.; Fan, J.; Guo, H. Usage pattern analysis of Beijing private electric vehicles based on real-world data. Energy 2019, 167, 1074–1085. [Google Scholar] [CrossRef]
- Zou, Y.; Wei, S.; Sun, F.; Hu, X.; Shiao, Y. Large-scale deployment of electric taxis in Beijing: A real-world analysis. Energy 2016, 100, 25–39. [Google Scholar] [CrossRef]
- Yang, T.; Xu, X.; Guo, Q.; Zhang, L.; Sun, H. EV charging behaviour analysis and modelling based on mobile crowdsensing data. IET Gener. Transm. Distrib. 2017, 11, 1683–1691. [Google Scholar] [CrossRef]
- Fieltsch, P.; Flämig, H.; Rosenberger, K. Analysis of charging behavior when using battery electric vehicles in commercial transport. Transp. Res. Procedia 2020, 46, 181–188. [Google Scholar] [CrossRef]
- Sun, X.-H.; Yamamoto, T.; Morikawa, T. Fast-charging station choice behavior among battery electric vehicle users. Transp. Res. Part D Transp. Environ. 2016, 46, 26–39. [Google Scholar] [CrossRef]
- Ashkrof, P.; Homem de Almeida Correia, G.; van Arem, B. Analysis of the effect of charging needs on battery electric vehicle drivers’ route choice behaviour: A case study in the Netherlands. Transp. Res. Part D Transp. Environ. 2020, 78, 102206. [Google Scholar] [CrossRef]
- Zhang, B.; Niu, N.; Li, H.; Wang, Z.; He, W. Could fast battery charging effectively mitigate range anxiety in electric vehicle usage? Evidence from large-scale data on travel and charging in Beijing. Transp. Res. Part D Transp. Environ. 2021, 95, 102840. [Google Scholar] [CrossRef]
- Fan, J.; Fu, C.; Stewart, K.; Zhang, L. Using big GPS trajectory data analytics for vehicle miles traveled estimation. Transp. Res. Part C Emerg. Technol. 2019, 103, 298–307. [Google Scholar] [CrossRef]
- Ko, J.; Guensler, R.; Hunter, M. Analysis of effects of driver/vehicle characteristics on acceleration noise using GPS-equipped vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2010, 13, 21–31. [Google Scholar] [CrossRef]
- Jia, Y. Short-Term Demand Forecasting of Network Car Based on Spatio-Temporal Feature Analysis. Master’s Thesis, Beijing Jiaotong University, Beijing, China, 2019. [Google Scholar]
- Chi, J.; Jiao, L.; Dong, T.; Gu, Y.; Ma, Y. Quantitative identification and visualization of urban functional area based on POI data. J. Geomat. 2016, 41, 68–73. [Google Scholar] [CrossRef]
- Yang, T. Study on Reckoning the Section Traffic Flow on the Basis of the Technology of Probe Car. Master’s Thesis, Beijing Jiaotong University, Beijing, China, 2006. [Google Scholar]
- Lin, X.; Liu, T.; Wang, Z. Annual Report on Green Development of China’s Urban Transportation; Social Science Literature Press: Beijing, China, 2019. [Google Scholar]
- Xu, Y.; Zheng, Y.; Yang, Y. On the movement simulations of electric vehicles: A behavioral model-based approach. Appl. Energy 2021, 283, 116356. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Field Name | Field Type | Field Description |
|---|---|---|
| Vehicle number | Varchar | Desensitized anonymous coding |
| Instant time | Datatime | Format: yyyy-mm-dd hh:mm:ss |
| Instant SOC | Integer | Format: dd, unit: % |
| Instant coordinates | Double | Format: dd.dddd, dd.dddd, WGS-84 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Xing, Q.; Chen, Z.; Zhang, Z.; Liu, B. Modeling and Analysis of Electric Vehicle User Behavior Based on Full Data Chain Driven. Sustainability 2022, 14, 8600. https://doi.org/10.3390/su14148600
Wang R, Xing Q, Chen Z, Zhang Z, Liu B. Modeling and Analysis of Electric Vehicle User Behavior Based on Full Data Chain Driven. Sustainability. 2022; 14(14):8600. https://doi.org/10.3390/su14148600
Chicago/Turabian StyleWang, Ruisheng, Qiang Xing, Zhong Chen, Ziqi Zhang, and Bo Liu. 2022. "Modeling and Analysis of Electric Vehicle User Behavior Based on Full Data Chain Driven" Sustainability 14, no. 14: 8600. https://doi.org/10.3390/su14148600
APA StyleWang, R., Xing, Q., Chen, Z., Zhang, Z., & Liu, B. (2022). Modeling and Analysis of Electric Vehicle User Behavior Based on Full Data Chain Driven. Sustainability, 14(14), 8600. https://doi.org/10.3390/su14148600