
What Affects the E-Bicycle Speed Perception in the Era of Eco-Sustainable Mobility: A Driving Simulator Study


Abstract
:1. Introduction
Speed Perception (Driving Simulator)
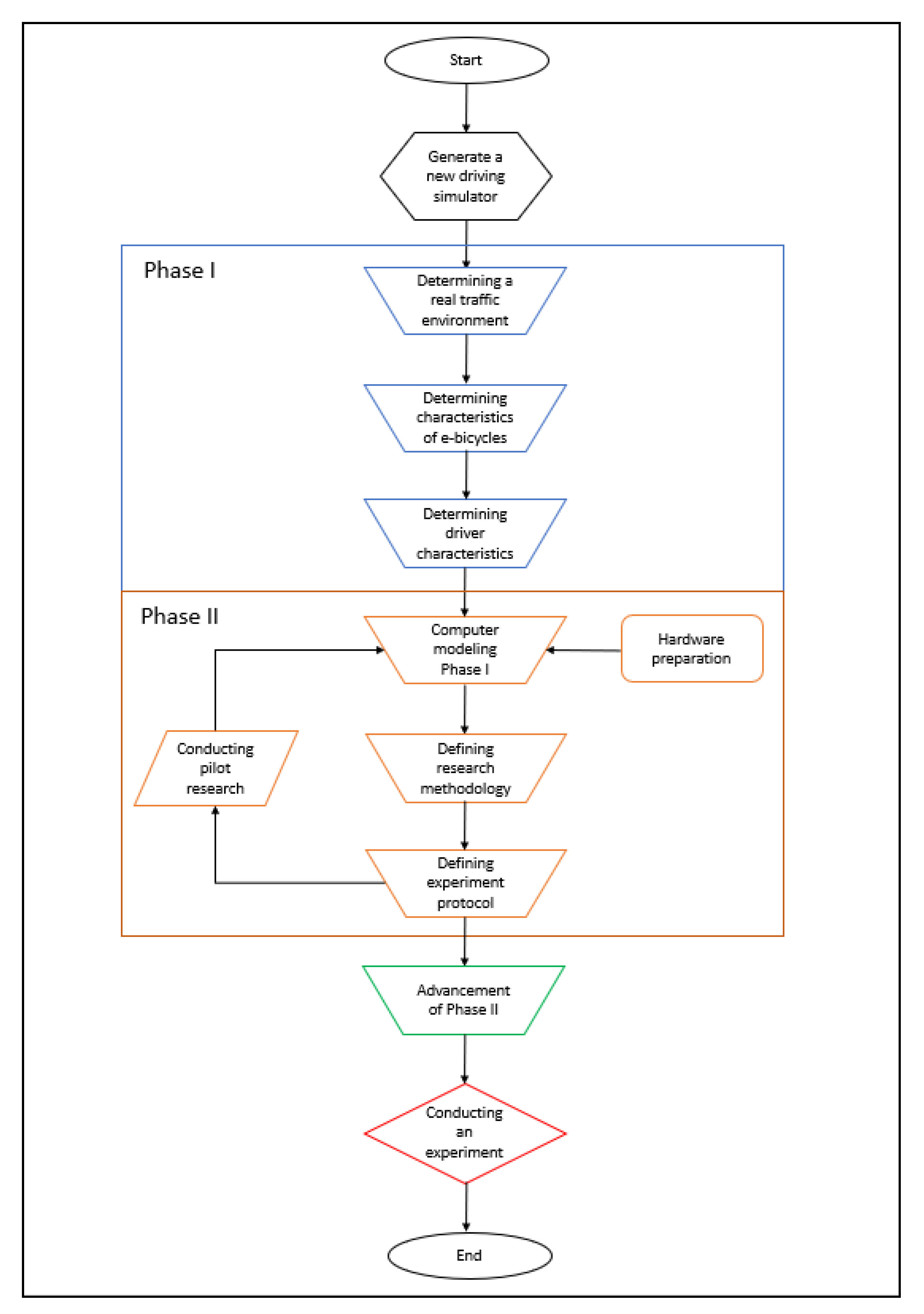
2. Methods
2.1. Participants
2.2. Procedure
2.3. Experimental Protocol
2.4. Stimuli
2.4.1. Characteristics of E-Bicycles and the Reflective Vest
2.4.2. E-Bicycle Speeds
2.4.3. Characteristics of the Driving Simulator
3. Analyses
4. Results
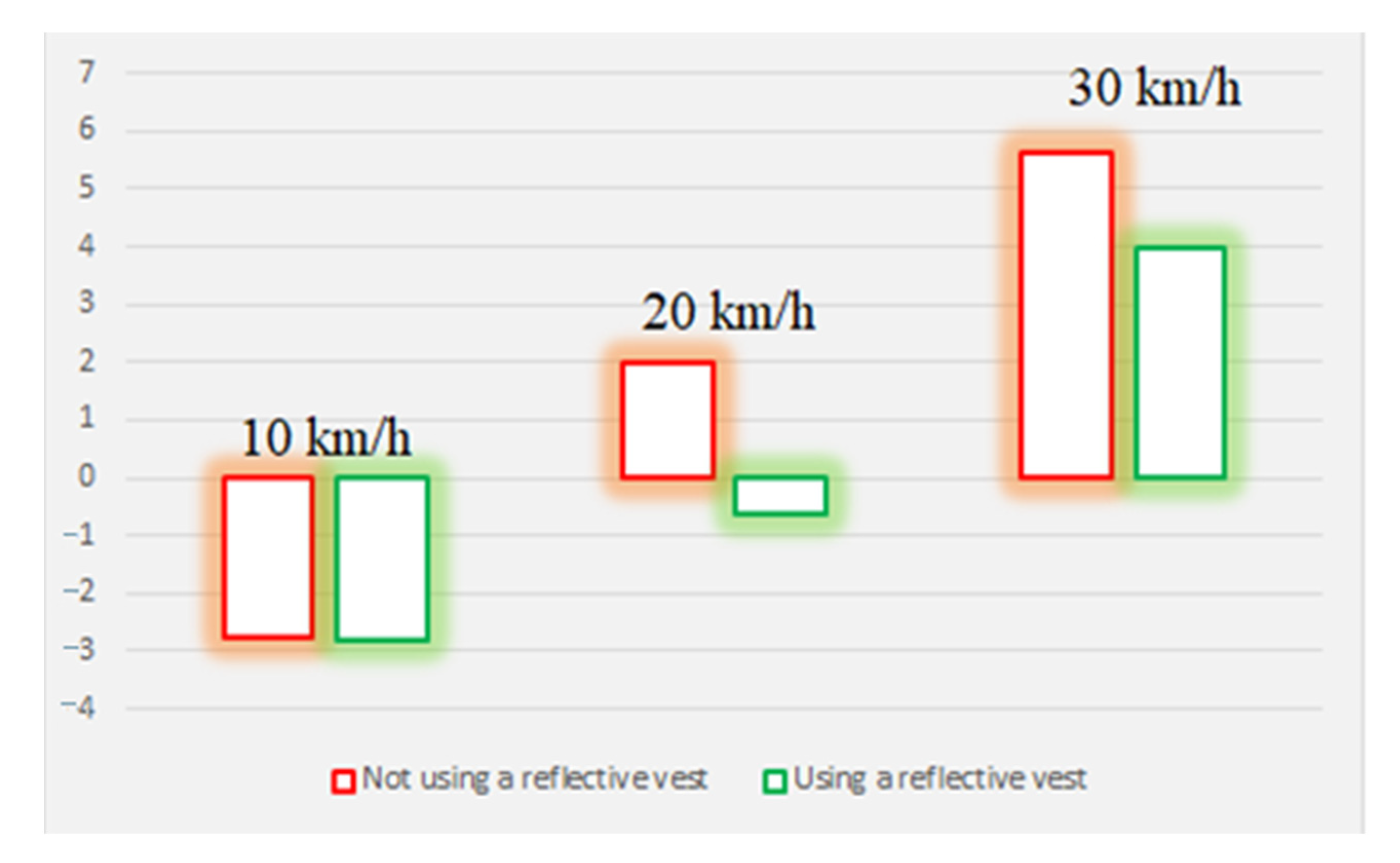
4.1. Estimation of the E-Bicycle Speed
4.2. Gender Differences in the Estimation of the E-Bicycle Speed
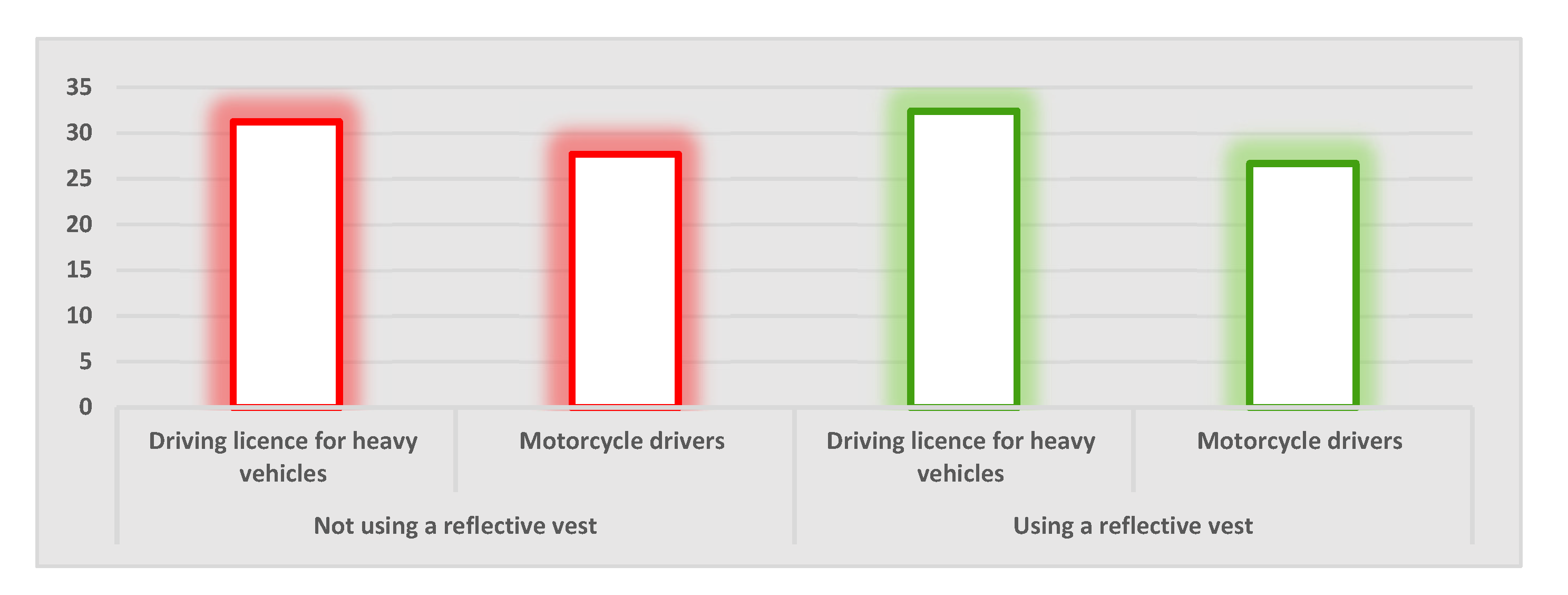
4.3. Impact of the Driving Licence Category on the Estimation of the E-Bicycle Speed
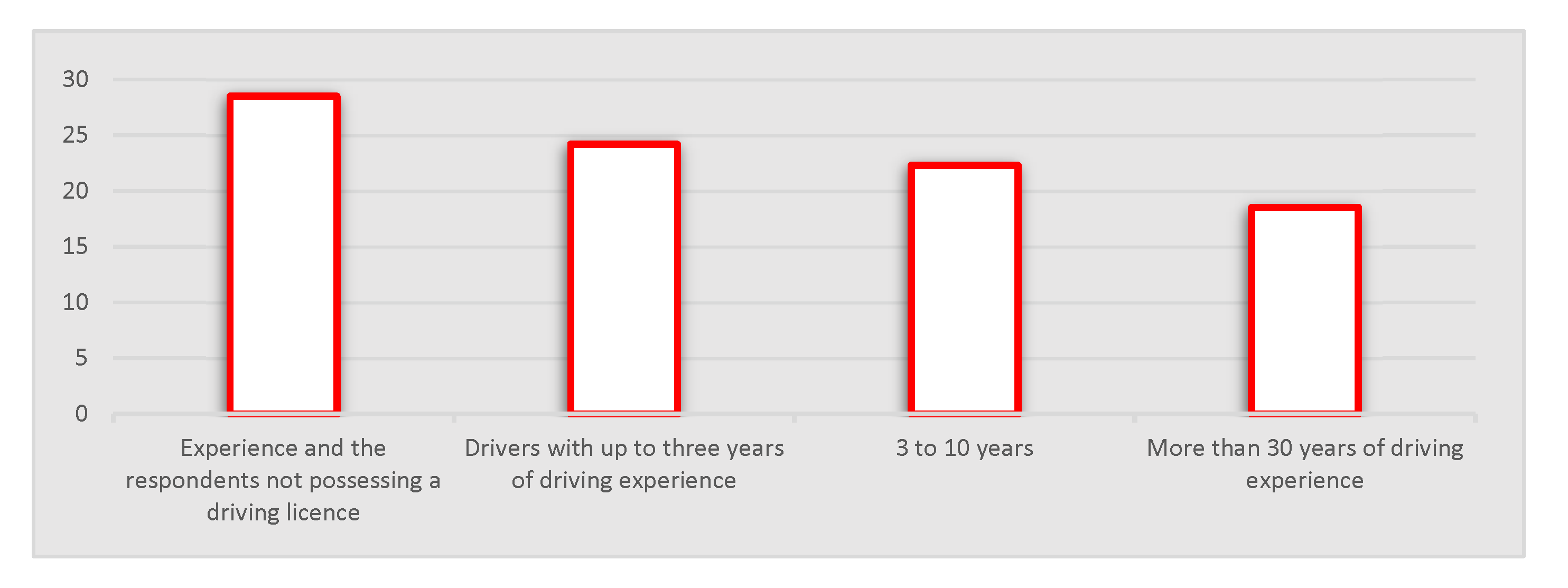
4.4. Impact of Driving Experience on the Estimation of the E-Bicycle Speed
5. Discussion
6. Conclusions
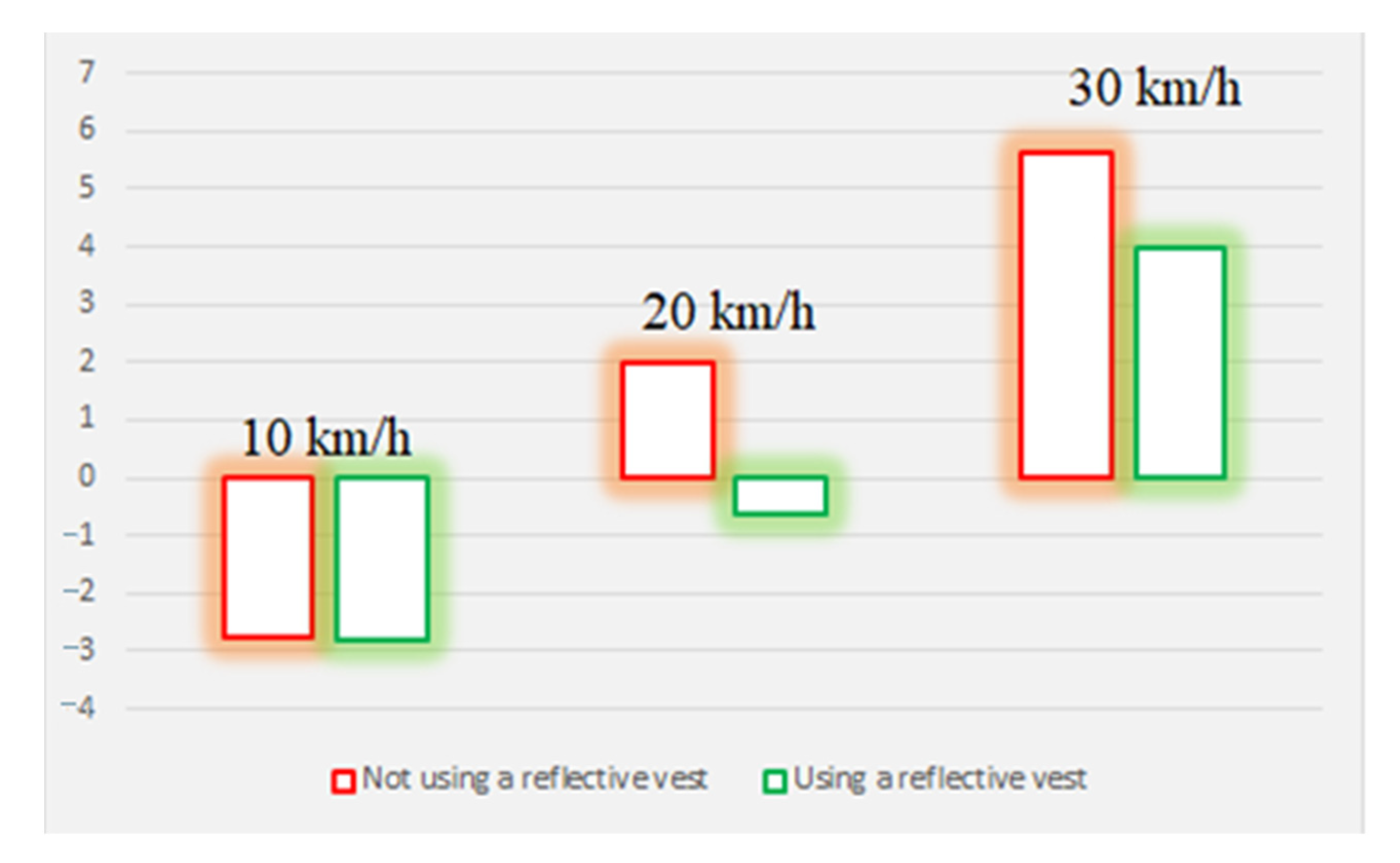
- The respondents underestimate the e-bicycle speed at the speeds of 20 km/h and 30 km/h and they overestimate it at the 10 km/h speed in both tested conditions;
- Errors in the estimation of the e-bicycle speed increase with the (rise of the) analyzed speed;
- The respondents make minor errors when estimating the e-bicycle speed in the cases when the e-bicyclist uses a reflective vest, and larger errors when the e-bicyclist does not use a reflective vest;
- There are statistically significant differences in the perception of the e-bicycle speed of 20 km/h (t = −4.2; p = 0.000) and 30 km/h (t = 2.925; p = 0.004) when the e-bicyclist uses/does not use a reflective vest;
- There are no statistically significant differences in the estimation of the e-bicycle speed according to the respondent’s gender for all the tested speeds and in both tested conditions;
- There are statistically significant differences between drivers with different driving licence categories for the speed of 30 km/h (when the e-bicyclist uses a reflective vest F = 2.554; p = 0.041 and when the e-bicyclist does not use a reflective vest F = 2.493; p = 0.045). The e-bicycle speed of 30 km/h is most accurately estimated by heavy vehicle drivers, while least accurately by motorcycle drivers;
- The results show statistically significant differences when estimating the speed of 30 km/h (F = 2.477; p = 0.046), among the drivers of different driving experience when the e-bicyclist uses/does not use a reflective vest. The respondents who do not possess a driving licence make the smallest number of errors in perception, while the drivers with more than 30 years of driving experience have the worst perception.
7. Future Research
8. Recommendations
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Schleinitz, K.; Petzoldt, T.; Krems, J.F.; Gehlert, T. The influence of speed, cyclists’ age, pedaling frequency, and observer age on observers’ time to arrival judgments of approaching bicycles and e-bikes. Accid. Anal. Prev. 2016, 92, 113–121. [Google Scholar] [CrossRef]
- Dozza, M.; Francesco, G.; Piccinini, B.; Werneke, J. Using naturalistic data to assess e-cyclist behavior. Transp. Res. Part F 2016, 41, 217–226. [Google Scholar] [CrossRef] [Green Version]
- Rose, G. E-bikes and urban transportation: Emerging issues and unresolved questions. Transportation 2012, 39, 81–96. [Google Scholar] [CrossRef]
- Schepers, J.P.; Fishman, E.; den Hertog, P.; Klein Wolt, K.; Schwab, A.L. The safety of electrically assisted bicycles compared to classic bicycles. Accid. Anal. Prev. 2014, 73, 174–180. [Google Scholar] [CrossRef]
- Cherry, C.; Cervero, R. Use characteristics and mode choice behavior of electric bike users in China. Transp. Policy 2007, 14, 247–257. [Google Scholar] [CrossRef] [Green Version]
- Fishman, E.; Cherry, C. E-bikes in the Mainstream: Reviewing a Decade of Research. Transp. Rev. 2015, 36, 72–91. [Google Scholar] [CrossRef]
- Van Cauwenberg, J.; De Bourdeaudhuij, I.; Clarys, P.; De Geus, B.; Deforche, B. Older E-bike Users: Demographic, Health, Mobility Characteristics, and Cycling Levels. Med. Sci. Sports Exerc. 2018, 50, 1780–1789. [Google Scholar] [CrossRef]
- Plazier, A.P.; Weitkamp, G.; Den Berg, A.E.V. “Cycling was never so easy!” An analysis of e-bike commuters’ motives, travel behaviour and experiences using GPS-tracking and interviews. J. Transp. Geogr. 2017, 65, 37–45. [Google Scholar] [CrossRef] [Green Version]
- Fyhri, A.; Fearnley, N. Effects of e-bikes on bicycle use and mode share. Transp. Res. Part Transp. Environ. 2015, 36, 45–52. [Google Scholar] [CrossRef] [Green Version]
- Campbell, A.A.; Cherry, C.R.; Ryerson, M.S.; Yang, X. Factors influencing the choice of shared bicycles and shared electric bikes in Beijing. Transp. Res. Part C Emerg. Technol. 2016, 67, 399–414. [Google Scholar] [CrossRef] [Green Version]
- Cherry, C. Electric Two-Wheelers in China: Analysis of Environmental, Safety, and Mobility Impacts. Ph.D. Thesis, University of California, Berkeley, CA, USA, 2007. [Google Scholar]
- Road Traffic Safety Agency. Statistical Report on the State of Traffic Safety in the Republic of Serbia in 2019; Road Traffic Safety Agency: Belgrade, Serbia, 2020.
- Rodier, C.; Shaheen, S.A.; Chung, S. Unsafe at any speed? What the literature says about low-speed modes. In Proceedings of the Transportation Research Board 84th Annual Meeting, Washington, DC, USA, 9–13 January 2003. [Google Scholar]
- Antić, B. Improving and Developing of the Method for Accidents Avoidance Analysis, Accidents Type: Passenger Car—Bicycle. Ph.D. Thesis, University of Belgrade, Faculty of Transport and Traffic Engineering, Belgrade, Serbia, 2012. [Google Scholar]
- Koenderink, J.; Doorn, A.V.; Gegenfurtner, K. Colors and Things. i-Perception 2020, 11. [Google Scholar] [CrossRef]
- Koenderink, J.; van Doorn, A.; Witzel, C.; Gegenfurtner, K. Hues of color afterimages. I Percept. 2020, 11. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jonauskaite, D.; Parraga, C.A.; Quiblier, M.; Mohr, C. Feeling blue or seeing red? Similar patterns of emotion associations with colour patches and colour terms. I Percept. 2020, 11. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Law on Road Traffic Safety; 41/2009, 53/2010, 101/2011, 32/2013, 2/2018, 87/2018 and 23/2019; Official Gazette: Belgrade, Serbia, 2019.
- Wood, J.M.; Tyrrell, R.A.; Marszalek, R.; Lacherez, P.; Carberry, T.; Chu, B.S. Using reflective clothing to enhance the conspicuity of bicyclists at night. Accid. Anal. Prev. 2012, 45, 726–730. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cicevic, S.; Trifunovic, A.; Mitrovic, S.; Nešic, M. The usability analysis of a different presentation media design for vehicle speed assessment. In Ergonomic Design and Assessment of Products and Systems; Nova Science Publishers: Hauppauge, NY, USA, 2017. [Google Scholar]
- Wu, C.; Yu, D.; Doherty, A.; Zhang, T.; Kust, L.; Luo, G. An investigation of perceived vehicle speed from a driver’s perspective. PLoS ONE 2017, 12, e0185347. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zheng, Z.; Du, Z.; Xiang, Q.; Chen, G. Influence of multiscale visual information on driver’s perceived speed in highway tunnels. Adv. Mech. Eng. 2018, 10, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Pešić, D.; Trifunović, A.; Ivković, I.; Čičević, S.; Žunjić, A. Evaluation of the effects of daytime running lights for passenger cars. Transp. Res. Part F Traffic Psychol. Behav. 2019, 66, 252–261. [Google Scholar] [CrossRef]
- Hussain, Q.; Alhajyaseen, W.K.; Pirdavani, A.; Reinolsmann, N.; Brijs, K.; Brijs, T. Speed perception and actual speed in a driving simulator and real-world: A validation study. Transp. Res. Part F Traffic Psychol. Behav. 2019, 62, 637–650. [Google Scholar] [CrossRef]
- Trifunović, A.V.; Čičević, S.J.; Lazarević, D.M.; Dragović, M.S.; Vidović, N.D.; Mošić, M.R.; Otat, O.V. Perception of 3D virtual road markings: Based on estimation of vehicle speed. FME Trans. 2019, 47, 360–369. [Google Scholar] [CrossRef]
- Hussain, Q.; Almallah, M.; Alhajyaseen, W.K.; Dias, C. Impact of the geometric field of view on drivers’ speed perception and lateral position in driving simulators. Procedia Comput. Sci. 2020, 170, 18–25. [Google Scholar] [CrossRef]
- O’Hern, S.; Oxley, J.; Stevenson, M. Validation of a bicycle simulator for road safety research. Accid. Anal. Prev. 2017, 100, 53–58. [Google Scholar] [CrossRef]
- Farah, H.; Piccinini, G.B.; Itoh, M.; Dozza, M. Modelling overtaking strategy and lateral distance in car-to-cyclist overtaking on rural roads: A driving simulator experiment. Transp. Res. Part F Traffic Psychol. Behav. 2019, 63, 226–239. [Google Scholar] [CrossRef]
- Abadi, M.G.; Hurwitz, D.S.; Sheth, M.; McCormack, E.; Goodchild, A. Factors impacting bicyclist lateral position and velocity in proximity to commercial vehicle loading zones: Application of a bicycling simulator. Accid. Anal. Prev. 2019, 125, 29–39. [Google Scholar] [CrossRef] [PubMed]
- Bıçaksız, P.; Öztürk, İ.; Özkan, T. The differential associations of functional and dysfunctional impulsivity with driving style: A simulator study. Transp. Res. Part F Traffic Psychol. Behav. 2019, 63, 1–11. [Google Scholar] [CrossRef]
- Keler, A.; Kaths, J.; Chucholowski, F.; Chucholowski, M.; Grigoropoulos, G.; Spangler, M.; Busch, F. A bicycle simulator for experiencing microscopic traffic flow simulation in urban environments. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HA, USA, 4–7 November 2018; pp. 3020–3023. [Google Scholar]
- Boot, W.R.; Charness, N.; Mitchum, A.; Roque, N.; Stothart, C.; Barajas, K. Driving Simulator Studies of the Effectiveness of Countermeasures to Prevent Wrong-Way Crashes (No. BDV30-977-10); Florida Department of Transportation: Tallahassee, FL, USA, 2015. [Google Scholar]
- Lubbe, N. Brake reactions of distracted drivers to pedestrian Forward Collision Warning systems. J. Saf. Res. 2017, 61, 23–32. [Google Scholar] [CrossRef] [PubMed]
- Olstam, J. Simulation of Surrounding Vehicles in Driving Simulators. Ph.D. Thesis, Linköping University Electronic Press, Linköping, Sweden, 2009. [Google Scholar]
- Pomarjanschi, L.; Dorr, M.; Barth, E. Gaze guidance reduces the number of collisions with pedestrians in a driving simulator. Acm Trans. Interact. Intell. Syst. (Tiis) 2012, 1, 1–14. [Google Scholar] [CrossRef]
- Sadia, R.; Bekhor, S.; Polus, A. Speed variation for different drivers, situations, and road geometry: Simulator and survey analysis. J. Transp. Saf. Secur. 2018, 10, 25–44. [Google Scholar] [CrossRef]
- Salamati, K.; Schroeder, B.; Rouphail, N.M.; Cunningham, C.; Zhang, Y.; Kaber, D. Simulator study of driver responses to pedestrian treatments at multilane roundabouts. Transp. Res. Rec. 2012, 2312, 67–75. [Google Scholar] [CrossRef] [Green Version]
- Taheri, S.M.; Matsushita, K.; Sasaki, M. Virtual reality driving simulation for measuring driver behavior and characteristics. J. Transp. Technol. 2017, 7, 123. [Google Scholar] [CrossRef] [Green Version]
- Kemeny, A.; Panerai, F. Evaluating perception in driving simulation experiments. Trends Cogn. Sci. 2003, 7, 31–37. [Google Scholar] [CrossRef]
- Dozza, M.; Schindler, R.; Bianchi-Piccinini, G.; Karlsson, J. How do drivers overtake cyclists? Accid. Anal. Prev. 2016, 88, 29–36. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jevtić, V.; Vujanić, M.; Lipovac, K.; Jovanović, D.; Pešić, D. The relationship between the travelling speed and motorcycle styles in urban settings: A case study in Belgrade. Accid. Anal. Prev. 2015, 75, 77–85. [Google Scholar] [CrossRef] [PubMed]
- Ivanisevic, T.; Simović, S.; Vukšić, V. The role and importance of e-bikes in CITY logistics, with special emphasis on sustainable transport. Put I Saobraćaj 2020, 66, 59–63. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors (Publication Year) | Problem Considered | Research Methodology (Sample) | Processing Data | Key Research Results |
|---|---|---|---|---|
| Bicycle | ||||
| O’Hern, S., Oxley, J., & Stevenson, M. [27] | Validation of a bicycle simulator for road safety research | Driving simulator (26 participants) | Statistical analysis | The study found evidence to suggest that various aspects of cyclist behaviour can be investigated using the driving simulator. |
| Farah, H., Piccinini, G. B., Itoh, M., & Dozza, M. [28] | Modelling overtaking strategy and lateral distance in car-to-cyclist overtaking on rural roads: A driving simulator experiment | Driving simulator (37 participants) | Statistical analysis | Higher driving speeds increase the probability of performing the flying overtaking manoeuvres. |
| Abadi, M. G., Hurwitz, D. S., Sheth, M., McCormack, E., & Goodchild, A. [29] | In this study, a bicycling simulator experiment examined bicycle and truck interactions. | Driving simulator (48 participants) | Statistical analysis | The results show that truck presence has an effect on the bicyclist’s performance, and this effect varies based on the engineering and design treatments employed. Truck manoeuvre had the largest effect on the bicyclist velocity and lateral position. |
| Passenger vehicle | ||||
| Cicevic, Trifunovic, Mitrovic, & Nesic [20] | Usability analysis of different presentation media designs for the vehicle speed assessment | Tablet PC and Smartboard (14 respondents) | Statistical analysis | There are differences between the medium on which tasks are presented, but also the accuracy of the assessment is influenced by the different analyzed speeds of vehicles, as well as the perspective from which the vehicle is observed. |
| Wu, Yu, Doherty, Zhang, Kust & Luo [21] | To examine the effects of multiple factors such as image scale, speed, road type, driving experience, and gender on the speed perception of drivers’ vehicles. | Driving simulator—Video clips (30) | Statistical analysis | The study shows the effect of multidimensional influential factors on the perceived vehicle speed from the drivers’ perspective. |
| Zheng, Du, Xiang, & Chen [22] | Influence of multiscale visual information on the driver’s perceived speed in highway tunnels. | Driving simulation (30 drivers) | Statistical analysis | The speed overestimation by drivers in the middle of tunnels results from the presence of high-frequency visual information, while speed underestimation results from the presence of medium-frequency and low-frequency visual information. |
| Pešić, Trifunović, Ivković, Čičević & Žunjić [23] | The paper shows whether there are differences in the driver’s estimation of the passenger car speed when daytime running lights (DRL) are turned on or off. | Driving simulator (185 drivers) | Statistical analysis | The results indicate that there are differences in the estimation of passenger car speed when DRL are turned on or off. |
| Hussain, Q., Alhajyaseen, W. K., Pirdavani, A., Reinolsmann, N., Brijs, K., & Brijs, T. [24] | Speed perception and actual speed in a driving simulator and real world: A validation study | Driving simulator (65 drivers) | Statistical analysis | The fixed-base driving simulator can be considered as a useful tool for research on actual speed and speed perception. |
| Trifunović, Čičević, Lazarević, Dragović, Vidović, Mošić & Otat [25] | To appraise the relationship between Perception of 3D virtual road markings and the estimation of vehicle speed. | Virtual reality (63 drivers) | Statistical analysis | There are statistically significant differences between drivers’ willingness to reduce vehicle speed as a response to the two types of 3D road markings. |
| Hussain, Q., Almallah, M., Alhajyaseen, W. K., & Dias, C. [26] | Impact of the geometric field of view on drivers’ speed perception and lateral position in driving simulators | Driving simulator (41 drivers) | Statistical analysis | Results of this study suggest that using the incorrect geometric field of view for any simulator would generate biased results in speed and lateral position. |
| Our study | What affects the perception of the e-bicycle speed? | Driving simulator (175 participants) | Statistical analysis | The e-bicycle speed perception is affected by the use of a reflective vest, driving experience and the driving licence category of the respondents. |
| Conditions | Not Using a Reflective Vest | Using a Reflective Vest | ||||
|---|---|---|---|---|---|---|
| Speed | 10 km/h | 20 km/h | 30 km/h | 10 km/h | 20 km/h | 30 km/h |
| Mean | 12.76 | 17.99 | 24.37 | 12.82 | 20.63 | 26.01 |
| Standard Deviation | 7.029 | 7.825 | 11.888 | 8.232 | 9.681 | 10.288 |
| Conditions/Speed | 10 km/h | 20 km/h | 30 km/h |
|---|---|---|---|
| Not using a reflective vest | −2.76 | 2.01 | 5.63 |
| Using a reflective vest | −2.82 | −0.63 | 3.99 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Simović, S.; Ivanišević, T.; Trifunović, A.; Čičević, S.; Taranović, D. What Affects the E-Bicycle Speed Perception in the Era of Eco-Sustainable Mobility: A Driving Simulator Study. Sustainability 2021, 13, 5252. https://doi.org/10.3390/su13095252
Simović S, Ivanišević T, Trifunović A, Čičević S, Taranović D. What Affects the E-Bicycle Speed Perception in the Era of Eco-Sustainable Mobility: A Driving Simulator Study. Sustainability. 2021; 13(9):5252. https://doi.org/10.3390/su13095252
Chicago/Turabian StyleSimović, Sreten, Tijana Ivanišević, Aleksandar Trifunović, Svetlana Čičević, and Dragan Taranović. 2021. "What Affects the E-Bicycle Speed Perception in the Era of Eco-Sustainable Mobility: A Driving Simulator Study" Sustainability 13, no. 9: 5252. https://doi.org/10.3390/su13095252
APA StyleSimović, S., Ivanišević, T., Trifunović, A., Čičević, S., & Taranović, D. (2021). What Affects the E-Bicycle Speed Perception in the Era of Eco-Sustainable Mobility: A Driving Simulator Study. Sustainability, 13(9), 5252. https://doi.org/10.3390/su13095252