1. Introduction
With the development of the automobile industry, automobile ownership has increased year by year, resulting in higher fuel consumption and CO
emissions, as well as global warming. The U.S. Environmental Protection Agency reported that transport traffic accounted for 28% of the total fuel consumption in 2016 worldwide [
1]. One-third of the world’s CO
emissions come from road transportation [
2]. Therefore, reducing automobile emissions plays a critical role in reducing greenhouse gases and improving air quality. This requirement promotes the automobile industry technology evolution and renewable energy development. In this sense, the adoption of electric vehicles (EVs) is a good alternative that contributes to reducing CO
emissions.
Compared with internal combustion engine vehicles (ICEVs), EVs have zero exhaust emissions during the operation period [
3]. They require less motor maintenance and have higher operation efficiency [
4]. These advantages motivate governments and enterprises to promote the adoption of EV. Specifically, the Chinese government has launched numerous policies, including license plate privileges and EV purchase subsidies [
5,
6] to accelerate the electrification process of vehicles. Consequently, the amount of EVs reached 1.53 million in 2017 [
7], and battery electric vehicles (BEVs) occupied over 80% of the EV market share [
8]. Therefore, it is critical to analyze the impact of the promotion of electric vehicles on CO
emissions.
There exists extensive research on compared CO
emissions between EVs and ICEVs. These studies can be roughly classified into three categories [
9]: the statistic method [
10,
11,
12], the well-to-wheel (WTW) method [
13,
14], and the life cycle assessment (LCA) method [
15]. However, most previous studies were based on laboratory testing [
10,
11,
12], small sample vehicle data [
13,
14], or statistical data [
15]. Increasing criticism has accumulated against the conclusions’ generalization of these studies, since there exist deviations between the real driving conditions of a large number of vehicles and the above situations [
14].
Existing research generally implemented on-board sensors to collect second-by-second instantaneous CO
emissions data or power consumption data [
16], which is intractable in real-world applications owing to the expense. In practice, we can only obtain low sampling frequency trajectory data for public transit vehicles, and low sampling frequency Controller Area Network (CAN) data recording the time, State of Charge (SoC), voltage, and current for public transit electric vehicles [
9]. Consequently, it is necessary to build a framework to compare the CO
emissions between EVs and conventional fuel vehicles based on low sampling frequency data.
There are two types of methods to estimate the vehicle emissions of conventional fuel vehicles based on trajectory data: macroscopic emissions models and microscopic emissions models. Wang et al. [
17] indicated that the macroscopic emissions models may be inferior regarding estimation accuracy because they cannot capture the dynamic characteristics of vehicles. Thus, the scholars proposed microscopic vehicle emissions models, such as CMEM [
18], MOVES [
19,
20], PHEM [
21,
22], and VT-Micro models [
23] to estimate the vehicle emissions accurately.
However, only a few of the above emissions models apply to transit buses. The CMEM and PHEM models suffer from bang-bang control, which means that drivers need to brake and accelerate at full speed to minimize their fuel consumption levels. The MOVES model avoids the bang-bang control problem, as well as provides robust estimates for vehicle emissions. However, it is time-consuming to update numerous input profiles when users apply this model. As for the VT-Micro model, this can achieve superior performance over the PHEM model on emissions estimation [
24], as well as circumvent the bang-bang control.
Therefore, we implemented the VT-Micro model to estimate CO emissions in this study. This presents a new challenge for applying the microscopic emissions models, because these models commonly use the second-by-second vehicle trajectories as input. However, the sampling frequency of most vehicle trajectory data ranges from 10 to 60 s. Therefore, it is significant to reconstruct the vehicle trajectories to second-by-second profiles, so that we can use the low sampling trajectory data in microscopic vehicle emissions models.
Numerous studies [
25,
26,
27] have been conducted to reconstruct second-by-second vehicle trajectories under low sample frequency situations. Wang et al. [
25] applied a hidden Markov model to reconstruct the trajectory; however, this was time-consuming in the computing process. Wang et al. [
26] applied an optimization model given temporal constraints to reconstruct the trajectory and used an approximation method to solve the problem; however, this may be inferior in accuracy. In this paper, we applied a modal activity-based method as proposed in [
27], because this method is interpretable as well as time-efficient. The model is comprised of two parts: to determine the modal activity sequence and to allocate the travel time/distance to each mode.
Another issue is how to estimate the CO
emissions of electric vehicles based on trajectory data. The use of electric vehicles provokes increased emissions from electric power generation. In comparison with conventional fuel buses, we can consider that the CO
emissions of EVs mainly come from electricity generation. We adopted the integration method in [
13,
14] to calculate the power consumption of electric vehicles. Then, the challenge lies in estimating the CO
emissions factor for electricity generation.
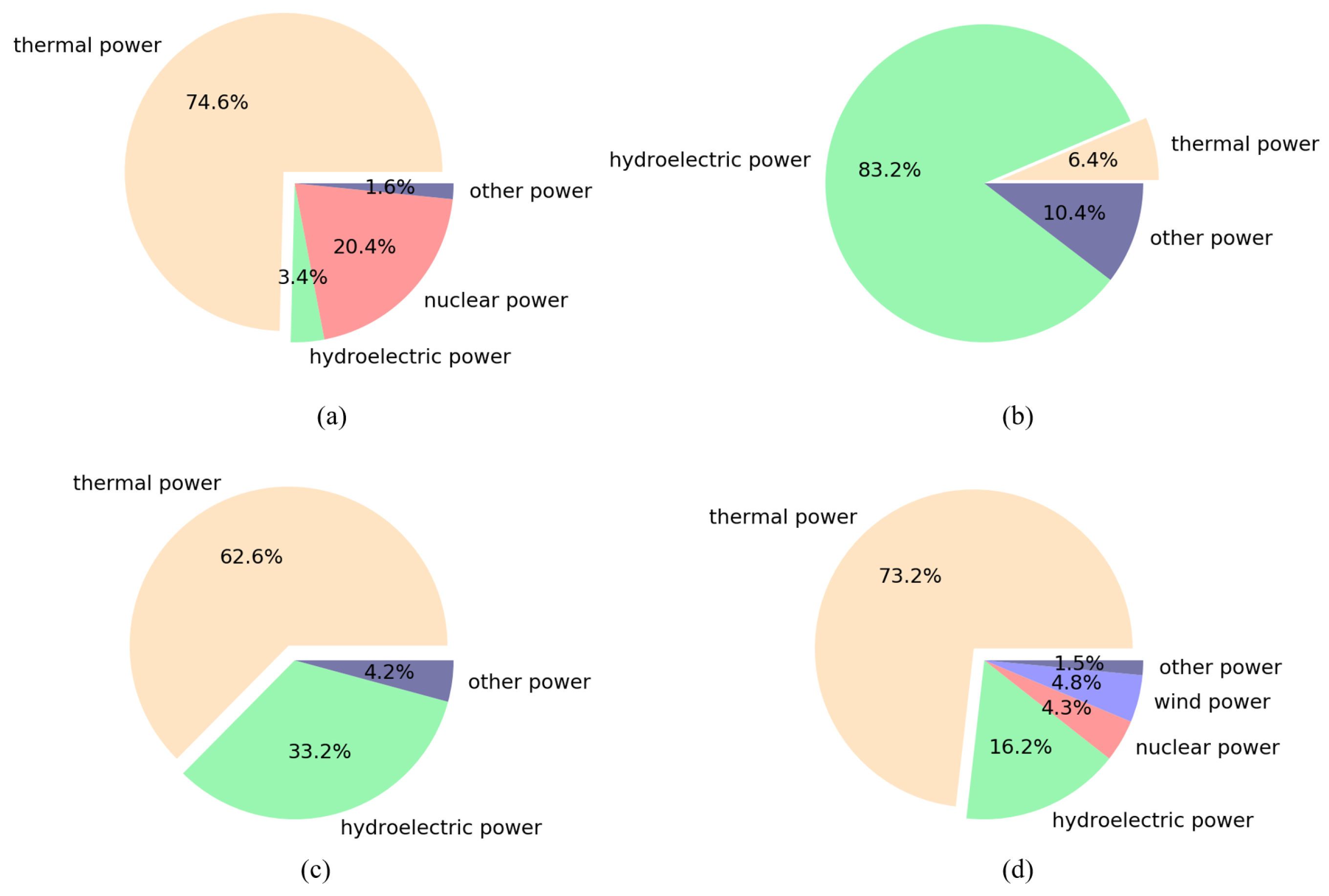
Previous research generally adopted the national power generation mix to estimate EVs CO
emissions. A recent study [
28] indicated that this will result in overestimating/underestimating the CO
emissions by about 120% using the national power generation mix. In this paper, we updated the data of the Guangdong power generation mix from extensive reviews of research papers, yearbooks, government announcements, and so on.
To conclude, we focused on building a framework to compare the WTW CO
emissions between battery electric buses (BEBs) and conventional diesel buses (CDBs) based on BEB sensor data in Shenzhen city. As the WTW CO
emissions accounted for about 70–90% of the full life cycle CO
emissions [
13,
14]. In addition, we obtained limited data of vehicle material for CDBs and vehicle recycling process data for both BEBS and CDBs [
14].
Specifically, we reconstructed the second-by-second CDB trajectories with a modal activity-based method [
27] and then estimated the CO
emissions of CDBs with the VT-Micro model. To improve the estimation accuracy of BEB CO
emissions, we updated the data of the Guangdong power generation mix. We compared the WTW CO
emissions between BEBs and CDBs traveling at different speed horizons to understand the characteristics and influencing factors of CO
emissions.
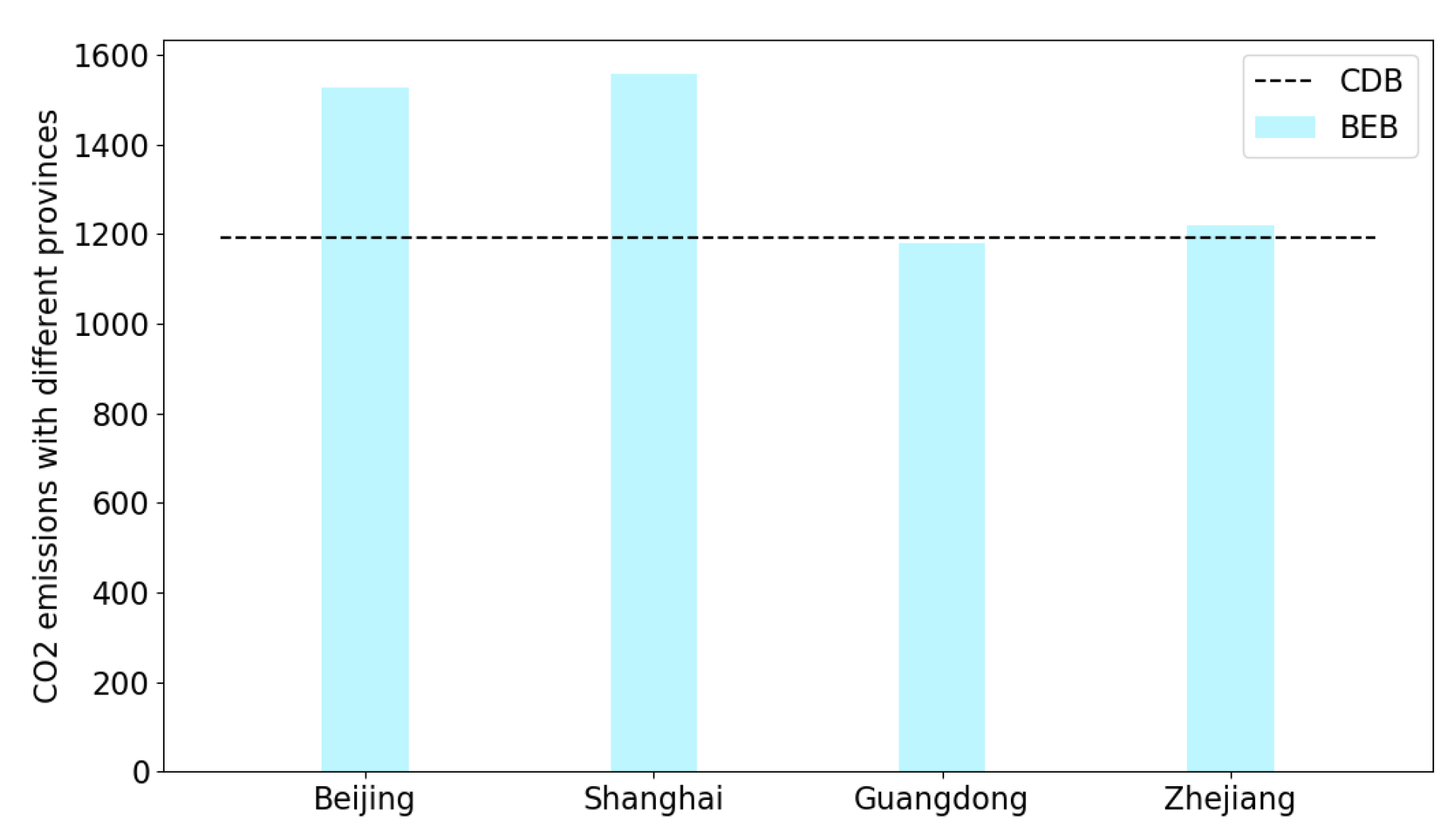
WTW CO emission estimation in the four provinces with the largest electric vehicle sales is presented to illustrate the importance of inter-provincial electricity transactions. We focus on the low frequency of air-conditioning usage due to the limitations of the BEB data.
The remainder of this work is organized as follows.
Section 2 describes the CO
emission estimation methods of BEBs and CDBs. In
Section 3, we present the trajectory reconstruction result, and the CO
emission comparisons between BEBs and CDBs traveling at different speed horizons.
Section 4 discusses the limits of this work. Finally, we conclude the study in
Section 5.
4. Discussion
The CO
emissions of a public transit bus are dependent on the ambient temperature. Prior studies [
13,
14] claimed that the CO
emissions of CDBs and BEBs with air-conditioning use increased 48% and 23% compared to the operation conditions without air-conditioning use. At this time, we could only obtain the BEB data in January for Shenzhen; we will investigate the CO
emissions across different seasons after we obtain the BEB data of a whole year.
Fortunately, a study [
13] demonstrated that BEB provides significant CO
emission reduction benefits compared with CDB when operating in hot weather with air-conditioning use. Therefore, we conclude that the CO
emission reduction benefit estimation was reasonable and even slightly conservative in our paper due to the frequency of air-conditioning usage being the lowest in January in Shenzhen.
Due to the unavailability of the city-scale CDBs data in Shenzhen, we utilized the BEB trajectories to estimate the WTW CO
emissions for CDBs. A previous study [
36] indicated that BEBs are driven more aggressively than CDBs. Fortunately, the experimental results indicated that the estimated errors were acceptable. The CDBs emitted CO
with 1.009–1.341 kg/km in our paper, while the average WTW CO
emissions factor for the tested CDBs in previous studies [
13,
14] was 1.4 kg/km. Considering that various technologies have been developed to reduce CO
emissions for CDBs in recent years, the estimated CO
emission factor for CDBs is acceptable. The experiments showed that BEBs could reduce CO
emissions by 18.0–23.9% compared with CDBs. The CO
reduction benefits are similar to those shown in prior research [
13,
14], which reported that BEBs could reduce CO
emissions by 19–35%.
Some factors that may influence the CO
emissions for CDBs are ignored in Equations (4) and (5), such as auxiliary power (power steering, air compressor, and so on), which is independent of the trajectory. However, auxiliary power is included in the calculation of the BEB power consumption in Equation (
1). Though the experimental results validated the effectiveness of our proposed method, we hope to design a more delicate model that can consider more factors to estimate CO
emissions in future work.
We aimed to compare CO emissions between BEBs and CDBs in this paper. To further validate the advantage of BEB adoption, more greenhouse gases are required to compare between BEBs and CDBs, and we plan to utilize CO emissions to evaluate multiple greenhouse gas emissions between BEBs and CDBs in our future work.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}