
A Comprehensive Emissions Model Combining Autonomous Vehicles with Park and Ride and Electric Vehicle Transportation Policies



Abstract
1. Introduction
2. Literature Review
2.1. Autonomous Vehicles(AVs)
2.2. Electric Vehicles (EV)
2.3. Park and Ride (P&R)
2.4. COPERT Software
3. Method
3.1. Overview of the Study Area
3.2. Methodology for the Calculation of Emissions
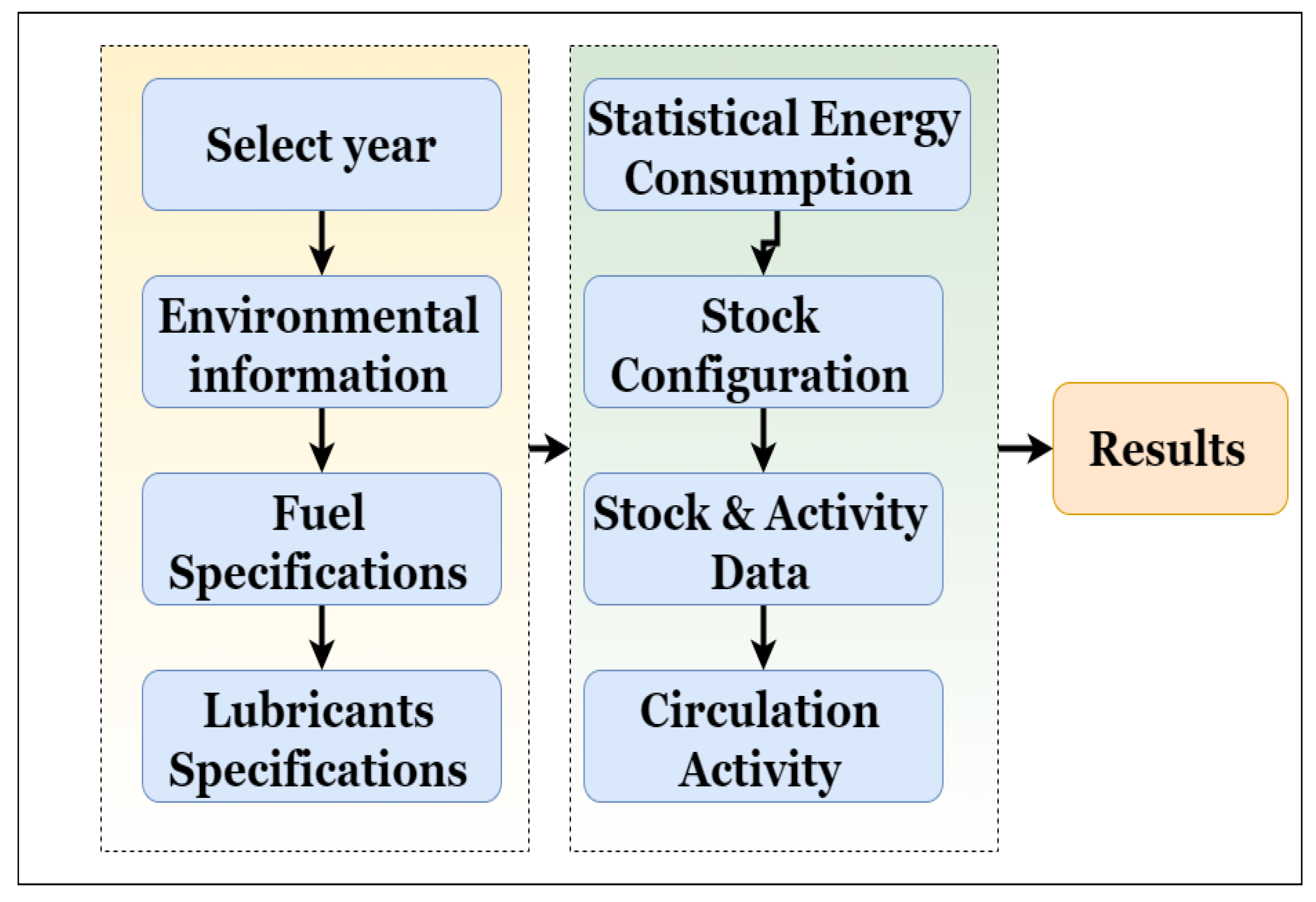
- Select the year: Select the year for which the study is intended to be carried out.
- Environmental information: The city’s meteorological information such as recorded temperature, the relative humidity for a year.
- Fuel specifications: Fuel values such as density (kg/m3), percentage of fuel aromatic components in PCA (% v/v), and NC cetane number can be entered.
- Lubricant specifications: information is pre-installed within the software.
- Statistical energy consumption: compares statistical and calculated energy consumption, modifies a number of input data (e.g., mileage, blend share), and recalculates emissions
- Stock configuration: The type of vehicles that make up the city’s vehicle fleet.
- Stock and activity data: The number of vehicles by category and kilometers travelled.
- Circulation activity: Urban trips are selected, which are the vehicles that are being investigated.
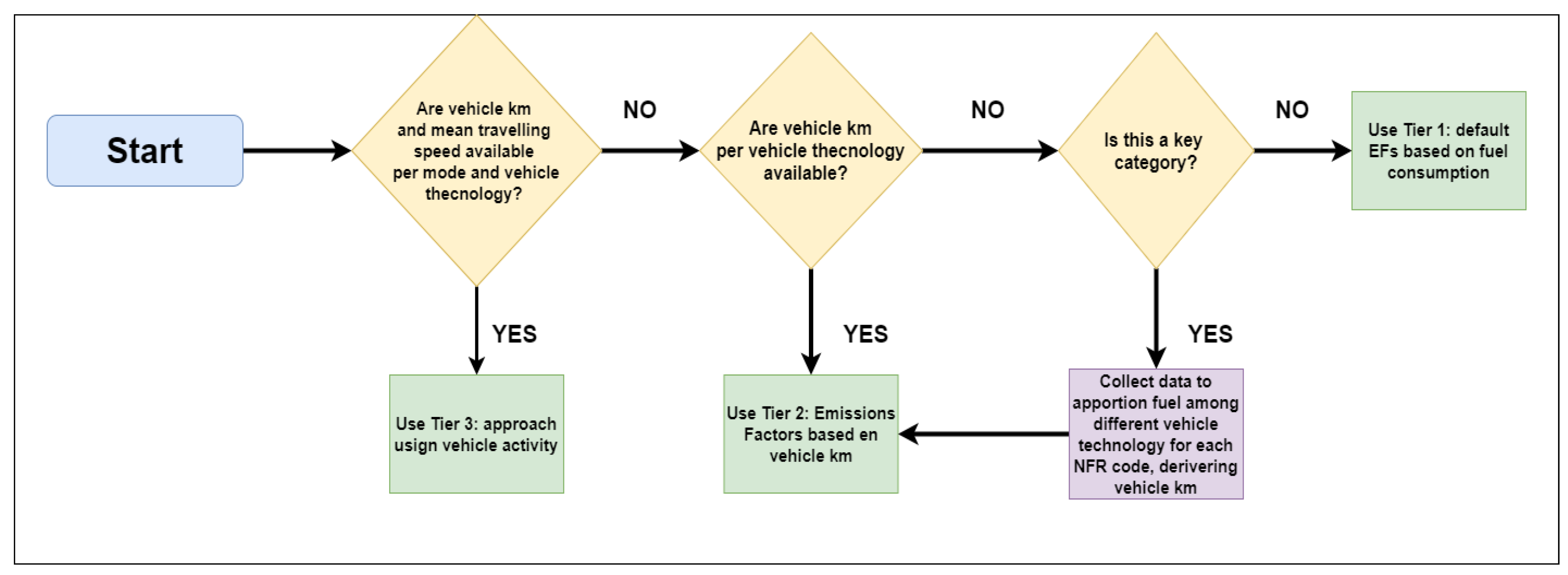
- Tier 1
- Tier 2
- Tier 3
3.3. Selected Scenarios
- Scenario I
- Scenario II
- Scenario III
- Scenario IV
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Maltese, I.; Gatta, V.; Marcucci, E. Active Travel in Sustainable Urban Mobility Plans. An Italian overview. Res. Transp. Bus. Manag. 2021. [Google Scholar] [CrossRef]
- Hu, X.; Chen, N.; Wu, N.; Yin, B. The potential impacts of electric vehicles on urban air quality in Shanghai city. Sustainability 2021, 13, 496. [Google Scholar] [CrossRef]
- Ortega, J.; Tóth, J.; Péter, T. A Comprehensive Model to Study the Dynamic Accessibility of the Park & Ride System. Sustainability 2021, 13, 4064. [Google Scholar] [CrossRef]
- Tettamanti, T.; Mohammadi, A.; Asadi, H.; Varga, I. A two-level urban traffic control for autonomous vehicles to improve network-wide performance. In Proceedings of the Transportation Research Procedia, Budapest, Hungary, 4–6 September 2017. [Google Scholar]
- Tomás, R.F.; Fernandes, P.; MacEdo, E.; Bandeira, J.M.; Coelho, M.C. Assessing the emission impacts of autonomous vehicles on metropolitan freeways. In Proceedings of the Transportation Research Procedia, Barcelona, Spain, 18–20 September 2020. [Google Scholar]
- Rövid, A.; Remeli, V.; Paufler, N.; Lengyel, H.; Zöldy, M.; Szalay, Z. Towards Reliable Multisensory Perception and Its Automotive Applications. Period. Polytech. Transp. Eng. 2020, 48, 334–340. [Google Scholar] [CrossRef]
- Pisoni, E.; Christidis, P.; Thunis, P.; Trombetti, M. Evaluating the impact of “Sustainable Urban Mobility Plans” on urban background air quality. J. Environ. Manag. 2019, 231, 249–255. [Google Scholar] [CrossRef]
- Wu, Y.; Zhang, L. Can the development of electric vehicles reduce the emission of air pollutants and greenhouse gases in developing countries? Transp. Res. Part D Transp. Environ. 2017. [Google Scholar] [CrossRef]
- Fontaras, G.; Zacharof, N.G.; Ciuffo, B. Fuel consumption and CO2 emissions from passenger cars in Europe–Laboratory versus real-world emissions. Prog. Energy Combust. Sci. 2017, 60, 97–131. [Google Scholar] [CrossRef]
- Kimpton, A.; Pojani, D.; Sipe, N.; Corcoran, J. Parking Behavior: Park ‘n’ Ride (PnR) to encourage multimodalism in Brisbane. Land Use Policy 2020. [Google Scholar] [CrossRef]
- Hou, B.; Zhao, S.; Liu, H. A Combined Modal Split and Traffic Assignment Model with Capacity Constraints for Siting Remote Park-and-Ride Facilities. IEEE Access 2020. [Google Scholar] [CrossRef]
- Adamczak, M.; Toboła, A.; Fijałkowska, J.; Cyplik, P.; Tórz, M. Analysis of incentives to eco-driving for car rental companies’ customers. Sustainability 2020, 12, 579. [Google Scholar] [CrossRef]
- Rong, B.; Zhao, H.; Cui, S.; Zhang, C. Continuum Dynamic Traffic Assignment Model for Autonomous Vehicles in a Polycentric Urban City with Environmental Consideration. Math. Probl. Eng. 2018. [Google Scholar] [CrossRef]
- Xu, L.; Yilmaz, H.Ü.; Wang, Z.; Poganietz, W.R.; Jochem, P. Greenhouse gas emissions of electric vehicles in Europe considering different charging strategies. Transp. Res. Part D Transp. Environ. 2020, 87, 102534. [Google Scholar] [CrossRef]
- Zöldy, M. Fuel properties of Butanol–Hydrogenated vegetable oil blends as a diesel extender option for internal combustion engines. Period. Polytech. Chem. Eng. 2020, 64, 205–212. [Google Scholar] [CrossRef]
- Olivier, J.G.J.; Schure, K.M.; Peters, J. Trends in Global CO2 and Total Greenhouse Gas 2019 Report; Netherlands Environmental Assessment Agency: The Hague, The Netherlands, 2020; Volume 2020. [Google Scholar]
- WEC. World Energy Resources 2016. World Energy Counc. 2016, 2016, 6–46. [Google Scholar]
- UNEP. Kick the Habit: A un Guide to Climate Nuatrality; UNEP: Nairobi, Kenya, 2008; ISBN 9789280729269. [Google Scholar]
- Zhen, X.; Wang, Y. An overview of methanol as an internal combustion engine fuel. Renew. Sustain. Energy Rev. 2015, 52, 477–493. [Google Scholar] [CrossRef]
- Huang, Y.; Hong, G.; Huang, R. Investigation to charge cooling effect and combustion characteristics of ethanol direct injection in a gasoline port injection engine. Appl. Energy 2015, 160, 244–254. [Google Scholar] [CrossRef]
- Alkharabsheh, A.; Moslem, S.; Oubahman, L.; Duleba, S. An integrated approach of multi-criteria decision-making and grey theory for evaluating urban public transportation systems. Sustainability 2021, 13, 2740. [Google Scholar] [CrossRef]
- European Parliament. Council of the European Union REGULATION (EC) No 715/2007 of the European Parliament and of the Council of 20 June 2007 on type approval of motor vehicles with respect to emissions from light passenger and commercial vehicles (Euro 5 and Euro 6) and on access to vehicle repair and mai. Off. J. Eur. Union 2007, L171, 1–16. [Google Scholar]
- Ortega, J.; Tóth, J.; Péter, T.; Moslem, S. An Integrated Model of Park-And-Ride Facilities for Sustainable Urban Mobility. Sustainability 2020, 12, 4631. [Google Scholar] [CrossRef]
- Ortega, J.; Tóth, J.; Péter, T. Mapping the Catchment Area of Park and Ride Facilities within Urban Environments. ISPRS Int. J. Geo-Inf. 2020, 9, 501. [Google Scholar] [CrossRef]
- Ortega, J.; Hamadneh, J.; Esztergár-Kiss, D.; Tóth, J. Simulation of the Daily Activity Plans of Travelers Using the Park-and-Ride System and Autonomous Vehicles: Work and Shopping Trip Purposes. Appl. Sci. 2020, 10, 2912. [Google Scholar] [CrossRef]
- Ortega, J.; Tóth, J.; Moslem, S.; Péter, T.; Duleba, S. An Integrated Approach of Analytic Hierarchy Process and Triangular Fuzzy Sets for Analyzing the Park-and-Ride Facility Location Problem. Symmetry 2020, 12, 1225. [Google Scholar] [CrossRef]
- Tilg, G.; Yang, K.; Menendez, M. Evaluating the effects of automated vehicle technology on the capacity of freeway weaving sections. Transp. Res. Part C Emerg. Technol. 2018, 96, 3–21. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Iacobucci, R.; McLellan, B.; Tezuka, T. Modeling shared autonomous electric vehicles: Potential for transport and power grid integration. Energy 2018, 158, 148–163. [Google Scholar] [CrossRef]
- Barth, M.; Boriboonsomsin, K. Energy and emissions impacts of a freeway-based dynamic eco-driving system. Transp. Res. Part D Transp. Environ. 2009, 14, 400–410. [Google Scholar] [CrossRef]
- Vimmerstedt, L.; Brown, A.; Newes, E.; Markel, T.; Schroeder, A.; Zhang, Y.; Chipman, P.; Johnson, S. Transformative Reduction of Transportation Greenhouse Gas Emissions: Opportunities for Change in Technologies and Systems; U.S. Department of Transportation: Washington, DC, USA, 2015; p. 121.
- Igliński, H.; Babiak, M. Analysis of the Potential of Autonomous Vehicles in Reducing the Emissions of Greenhouse Gases in Road Transport. Procedia Eng. 2017, 192, 353–358. [Google Scholar] [CrossRef]
- Obaid, M.; Szalay, Z. A novel model representation framework for cooperative intelligent transport systems. Period. Polytech. Transp. Eng. 2019. [Google Scholar] [CrossRef]
- Huang, Y.; Ng, E.C.Y.; Zhou, J.L.; Surawski, N.C.; Chan, E.F.C.; Hong, G. Eco-driving technology for sustainable road transport: A review. Renew. Sustain. Energy Rev. 2018, 93, 596–609. [Google Scholar] [CrossRef]
- Sivak, M.; Schoettle, B. Eco-driving: Strategic, tactical, and operational decisions of the driver that influence vehicle fuel economy. Transp. Policy 2012, 22, 96–99. [Google Scholar] [CrossRef]
- El-Shawarby, I.; Ahn, K.; Rakha, H. Comparative field evaluation of vehicle cruise speed and acceleration level impacts on hot stabilized emissions. Transp. Res. Part D Transp. Environ. 2005, 10, 13–30. [Google Scholar] [CrossRef]
- MacKenzie, D.W. Fuel Economy Regulations and Efficiency Technology Improvements in U.S. Cars Since 1975. Ph.D. Dissertation, Massachusetts Institute of Technology, Cambridge, MA, USA, 2013. [Google Scholar]
- Tsugawa, S. An Overview on an Automated Truck Platoon within the Energy ITS Project; IFAC: Wien, Austria, 2013; Volume 7, ISBN 9783902823434. [Google Scholar]
- Obaid, M.; Szalay, Z.; Török, Á. Reconsidering the cybersecurity framework in the road transportation domain. Acta Polytech. Hung. 2020, 17, 57–83. [Google Scholar] [CrossRef]
- Boriboonsomsin, K.; Barth, M.J.; Zhu, W.; Vu, A. Eco-routing navigation system based on multisource historical and real-time traffic information. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1694–1704. [Google Scholar] [CrossRef]
- Ericsson, E.; Larsson, H.; Brundell-Freij, K. Optimizing route choice for lowest fuel consumption–Potential effects of a new driver support tool. Transp. Res. Part C Emerg. Technol. 2006, 14, 369–383. [Google Scholar] [CrossRef]
- Sanguinetti, A.; Kurani, K.; Davies, J. The many reasons your mileage may vary: Toward a unifying typology of eco-driving behaviors. Transp. Res. Part D Transp. Environ. 2017, 52, 73–84. [Google Scholar] [CrossRef]
- Ecodriven org. ECODRIVEN Campaign Catalogue for European Ecodriving & Traffic Safety Campaigns. Available online: http://docplayer.net/9158908-Ecodriven-campaign-catalogue-for-european-ecodriving-traffic-safety-campaigns.html (accessed on 1 March 2021).
- Jochem, P.; Babrowski, S.; Fichtner, W. Assessing CO2 emissions of electric vehicles in Germany in 2030. Transp. Res. Part A Policy Pract. 2015, 78, 68–83. [Google Scholar] [CrossRef]
- Shen, W.; Han, W.; Wallington, T.J.; Winkler, S.L. China Electricity Generation Greenhouse Gas Emission Intensity in 2030: Implications for Electric Vehicles. Environ. Sci. Technol. 2019, 53, 6063–6072. [Google Scholar] [CrossRef]
- Ke, W.; Zhang, S.; He, X.; Wu, Y.; Hao, J. Well-to-wheels energy consumption and emissions of electric vehicles: Mid-term implications from real-world features and air pollution control progress. Appl. Energy 2017, 188, 367–377. [Google Scholar] [CrossRef]
- Orsi, F.; Muratori, M.; Rocco, M.; Colombo, E.; Rizzoni, G. A multi-dimensional well-to-wheels analysis of passenger vehicles in different regions: Primary energy consumption, CO2 emissions, and economic cost. Appl. Energy 2016, 169, 197–209. [Google Scholar] [CrossRef]
- Song, Z.; He, Y.; Zhang, L. Integrated planning of park-and-ride facilities and transit service. Transp. Res. Part C Emerg. Technol. 2017, 74, 182–195. [Google Scholar] [CrossRef]
- Pitsiava–Latinopoulou, M.; Basbas, S.; Papoutsis, K.; Sdoukopoulos, E. Parking Policies for Supporting Sustainable Mobility. Procedia Soc. Behav. Sci. 2012, 48, 897–906. [Google Scholar] [CrossRef]
- Mingardo, G. Transport and environmental effects of rail-based Park and Ride: Evidence from the Netherlands. J. Transp. Geogr. 2013. [Google Scholar] [CrossRef]
- Holguı´n-Veras, J.; Yushimito, W.F.; Aros-Vera, F.; Reilly, J.J. User rationality and optimal park-and-ride location under potential demand maximization. Transp. Res. Part B Methodol. 2012, 46, 949–970. [Google Scholar] [CrossRef]
- Duncan, M.; Christensen, R.K. An analysis of park-and-ride provision at light rail stations across the US. Transp. Policy 2013, 25, 148–157. [Google Scholar] [CrossRef]
- Farhan, B.; Murray, A.T. Distance decay and coverage in facility location planning. Ann. Reg. Sci. 2006, 40, 279–295. [Google Scholar] [CrossRef]
- Ortega, J.; Moslem, S.; Tóth, J.; Péter, T.; Palaguachi, J.; Paguay, M. Using Best Worst Method for Sustainable Park and Ride Facility Location. Sustainability 2020, 12, 83. [Google Scholar] [CrossRef]
- Kastori, G.E.; Papadimitriou, G.; Katsis, P.; Kouridis, C.; Saharidis, G.K.D. Development of a novel model for co-modal emission calculation and inventory methodology. Energy Syst. 2019. [Google Scholar] [CrossRef]
- Li, F.; Zhuang, J.; Cheng, X.; Li, M.; Wang, J.; Yan, Z. Investigation and prediction of heavy-duty diesel passenger bus emissions in Hainan using a COPERT model. Atmosphere 2019, 10, 106. [Google Scholar] [CrossRef]
- O’Driscoll, R.; ApSimon, H.M.; Oxley, T.; Molden, N.; Stettler, M.E.J.; Thiyagarajah, A. A Portable Emissions Measurement System (PEMS) study of NOx and primary NO2 emissions from Euro 6 diesel passenger cars and comparison with COPERT emission factors. Atmos. Environ. 2016. [Google Scholar] [CrossRef]
- Gkatzoflias, D.; Kouridis, C.; Mellios, G.; Saliakas, V.; Katsis, P. A Scenario Evaluation Model for the Application of CO2 and Air Pollutant Reduction Policies. Procedia Soc. Behav. Sci. 2012. [Google Scholar] [CrossRef]
- Alam, M.S.; Hyde, B.; Duffy, P.; McNabola, A. Assessment of pathways to reduce CO2 emissions from passenger car fleets: Case study in Ireland. Appl. Energy 2017, 189, 283–300. [Google Scholar] [CrossRef]
- Zachariadis, T.; Samaras, Z. An Integrated Modeling System for the Estimation of Motor Vehicle Emissions. J. Air Waste Manag. Assoc. 1999. [Google Scholar] [CrossRef] [PubMed]
- Smit, R.; Ntziachristos, L. COPERT Australia: A new software to estimate vehicle emissions in Australia. In Proceedings of the Australasian Transport Research Forum, ATRF 2013–Proceedings, Brisbane, Australia, 2–4 October 2013. [Google Scholar]
- Cuenca Municipality. Sustainable Urban Mobility Plan and Public Areas; Cuenca Municipality: Cuenca, Ecuador, 2014. [Google Scholar]
- Universidad del Azuay. Available online: http://gis.uazuay.edu.ec/ierse/sistemagrafico.php (accessed on 1 January 2021).
- Ntziachristos, L.; Gkatzoflias, D.; Kouridis, C.; Samaras, Z. COPERT: A European road transport emission inventory model. Environ. Sci. Eng. 2009. [Google Scholar] [CrossRef]
- Kousoulidou, M.; Fontaras, G.; Ntziachristos, L.; Bonnel, P.; Samaras, Z.; Dilara, P. Use of portable emissions measurement system (PEMS) for the development and validation of passenger car emission factors. Atmos. Environ. 2013. [Google Scholar] [CrossRef]
- Kousoulidou, M.; Ntziachristos, L.; Gkeivanidis, S.; Samaras, Z.; Franco, V.; Dilara, P. Validation of the COPERT road emission inventory model with real-use data. In Proceedings of the 19th Annual International Emission Inventory Conference, San Antonio, TX, USA, 27–30 September 2010. [Google Scholar]
- European Environment Agency. 1.A.3.b.i-iv Road Transport 2019 Report; European Environment Agency: København, Denmark, 2019; ISBN 9788578110796.
- Banister, D. Unsustainable Transport: City Transport in the New Century; Elsevier: Abingdon, UK; Routledge: Abingdon, UK, 2005; ISBN 0203003888. [Google Scholar]
- Cavadas, J.; Antunes, A.P. An optimization model for integrated transit-parking policy planning. Transportation 2019, 46, 1867–1891. [Google Scholar] [CrossRef]
- Cavadas, J.; Antunes, A.P. Optimization-based study of the location of park-and-ride facilities. Transp. Plan. Technol. 2019, 42, 201–226. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
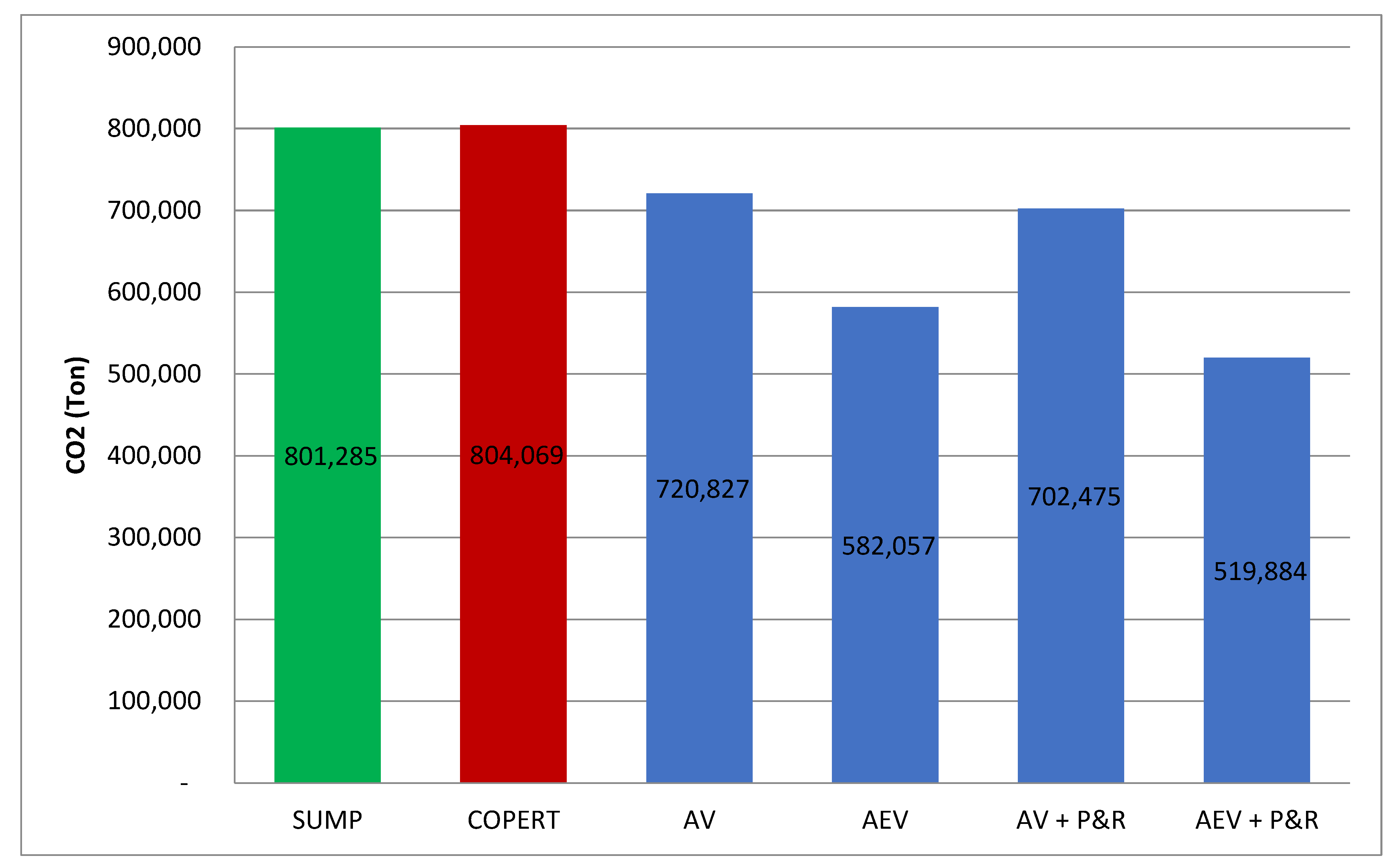
| Scenario | CO | NOx | CO2 | |
|---|---|---|---|---|
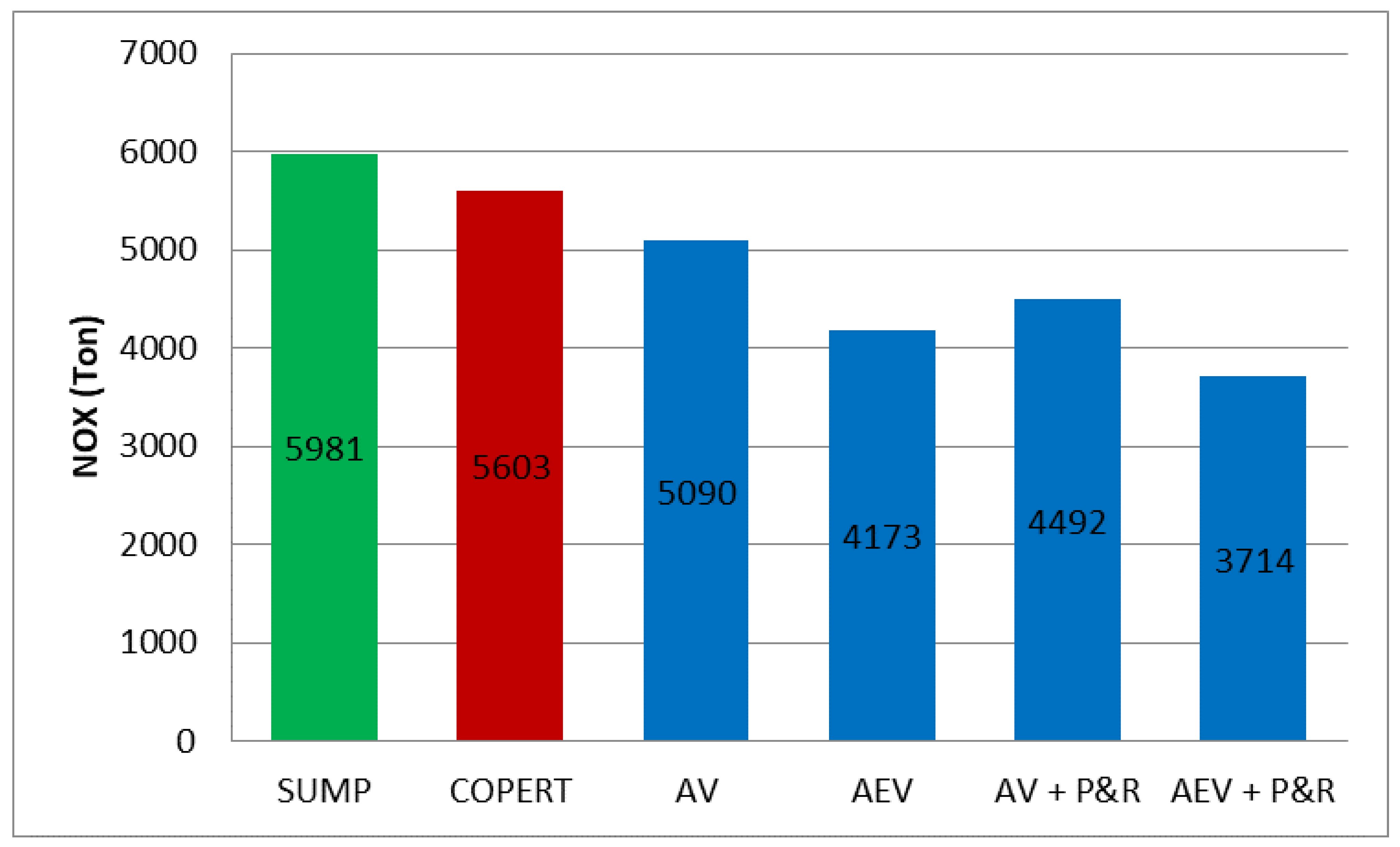
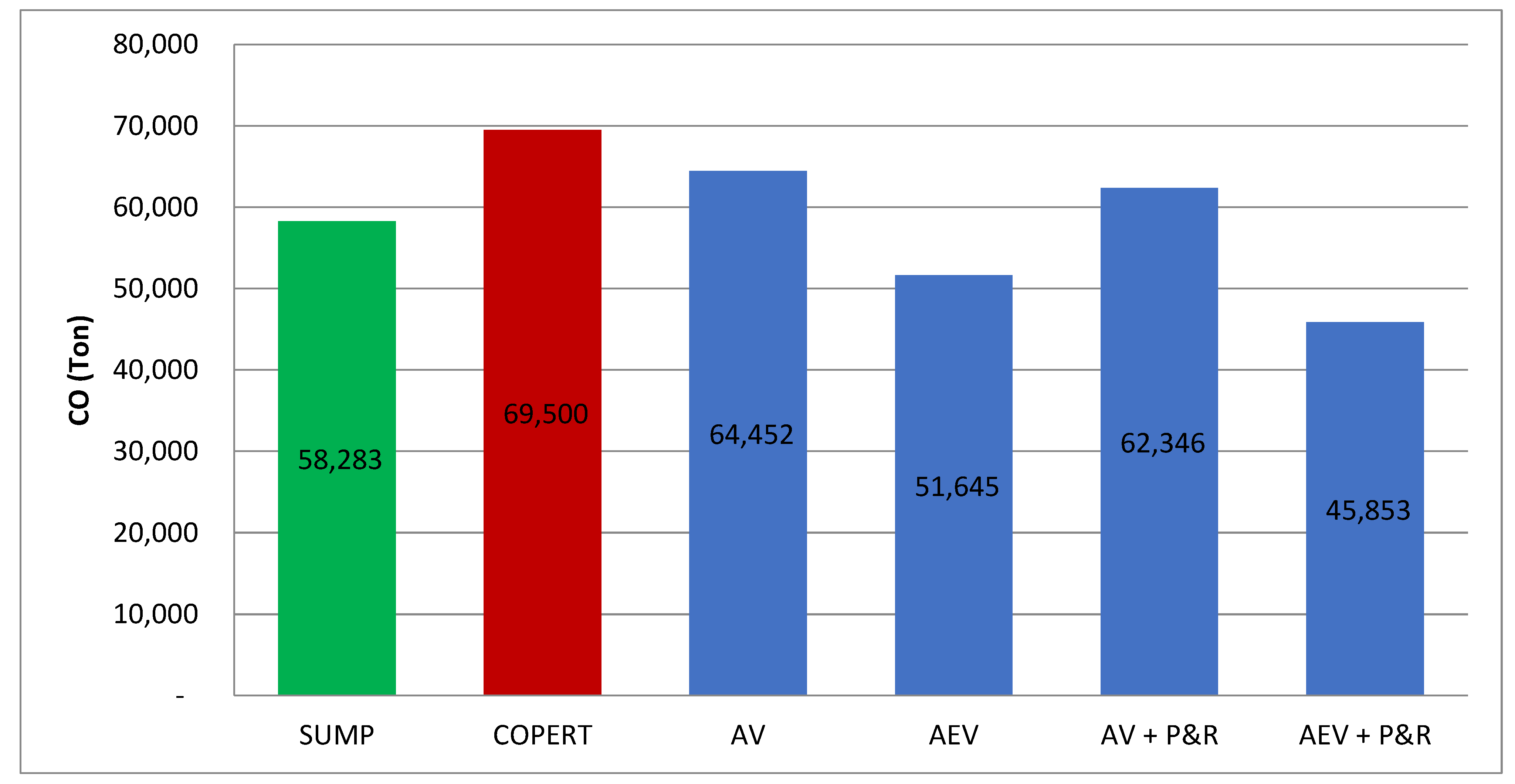
| Base | (Tons) | 69,500 | 5603 | 804,069 |
| I | AV | 7% | 9% | 10% |
| II | AEV | 26% | 26% | 28% |
| III | AV + P&R | 10% | 20% | 13% |
| IV | AEV + P&R | 34% | 34% | 35% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Obaid, M.; Torok, A.; Ortega, J. A Comprehensive Emissions Model Combining Autonomous Vehicles with Park and Ride and Electric Vehicle Transportation Policies. Sustainability 2021, 13, 4653. https://doi.org/10.3390/su13094653
Obaid M, Torok A, Ortega J. A Comprehensive Emissions Model Combining Autonomous Vehicles with Park and Ride and Electric Vehicle Transportation Policies. Sustainability. 2021; 13(9):4653. https://doi.org/10.3390/su13094653
Chicago/Turabian StyleObaid, Mohammed, Arpad Torok, and Jairo Ortega. 2021. "A Comprehensive Emissions Model Combining Autonomous Vehicles with Park and Ride and Electric Vehicle Transportation Policies" Sustainability 13, no. 9: 4653. https://doi.org/10.3390/su13094653
APA StyleObaid, M., Torok, A., & Ortega, J. (2021). A Comprehensive Emissions Model Combining Autonomous Vehicles with Park and Ride and Electric Vehicle Transportation Policies. Sustainability, 13(9), 4653. https://doi.org/10.3390/su13094653