
Recycling Waste Classification Using Vision Transformer on Portable Device


Abstract
1. Introduction
- An automatic waste classification method based on vision transformer is proposed to improve the efficiency of resource recycling;
- Experiments show that the proposed method outperforms the existing methods;
- The trained model is deployed on cloud server for real-time and convenient waste classification on portable devices.
2. Materials and Methods
2.1. Overall Scheme
2.2. Vision Transformer Model
2.3. Deployed on the Cloud
2.4. Experimental Details
3. Experimental Results and Discussion
3.1. Performance of Vision Transformer Model
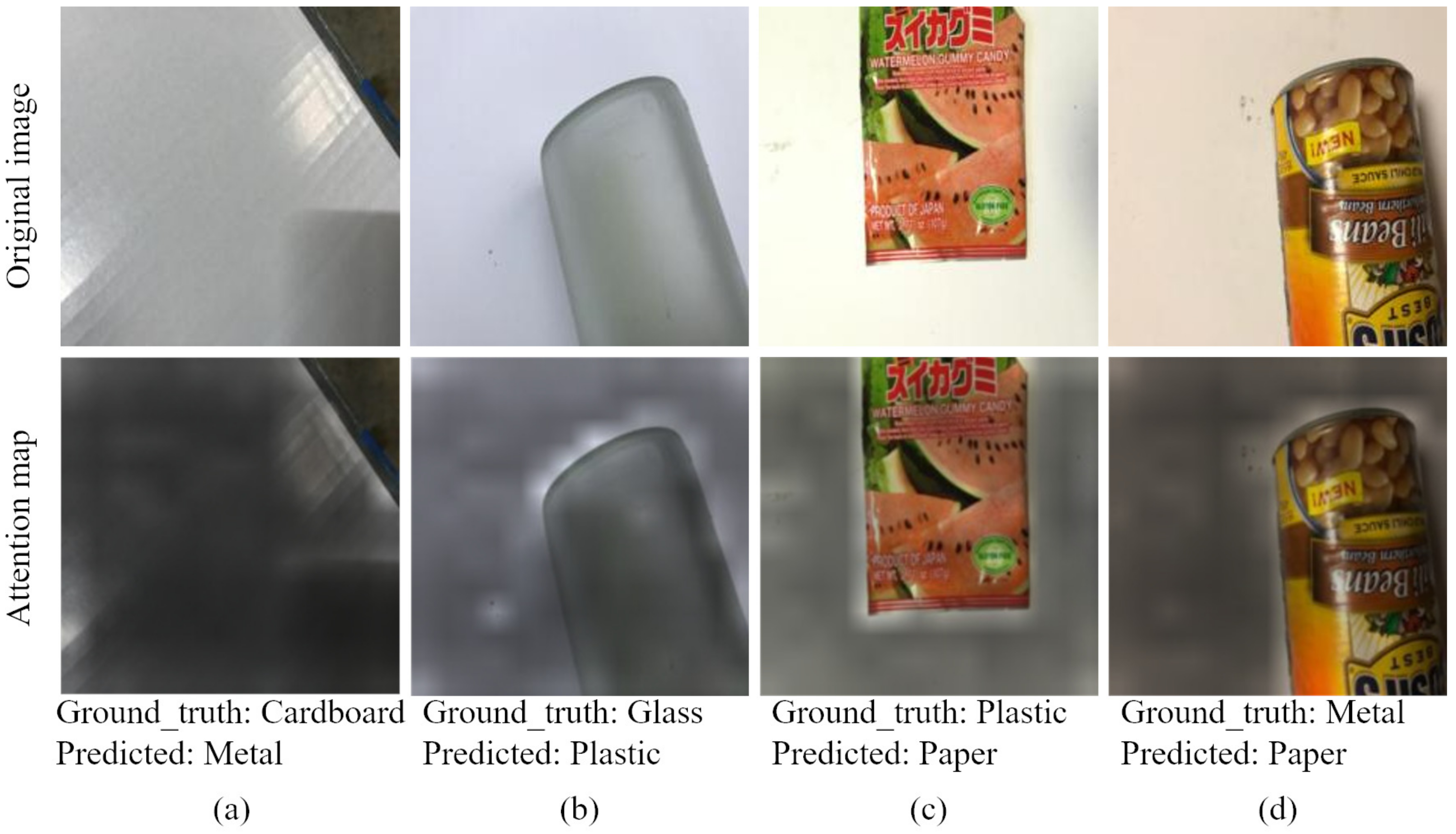
3.2. Self-Attention Mechanism
3.3. Influencing Factors of the Model Performance
3.4. Evaluation on Different Datasets
3.5. Application on Portable Device
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, Z.; Peng, B.; Huang, Y.; Sun, G. Classification for plastic bottles recycling based on image recognition. Waste Manag. 2019, 88, 170–181. [Google Scholar] [CrossRef] [PubMed]
- Seike, T.; Isobe, T.; Harada, Y.; Kim, Y.; Shimura, M. Analysis of the efficacy and feasibility of recycling PVC sashes in Japan. Resour. Conserv. Recycl. 2018, 131, 41–53. [Google Scholar] [CrossRef]
- Borowski, P.F. Environmental pollution as a threats to the ecology and development in Guinea Conakry. Ochr. Środowiska Zasobów Nat. 2017, 28, 27–32. [Google Scholar] [CrossRef]
- Zelazinski, T.; Ekielski, A.; Tulska, E.; Vladut, V.; Durczak, K. Wood dust application for improvment of selected properties of thermoplastic starch. Inmateh. Agric. Eng. 2019, 58, 37–44. [Google Scholar]
- Żelaziński, T. Properties of biocomposites from rapeseed meal, fruit pomace and microcrystalline cellulose made by press pressing: Mechanical and physicochemical characteristics. Materials 2021, 14, 890. [Google Scholar] [CrossRef]
- Vo, A.H.; Vo, M.T.; Le, T. A novel framework for trash classification using deep transfer learning. IEEE Access 2019, 7, 178631–178639. [Google Scholar] [CrossRef]
- AR, A.R.; Hasan, S.; Mahmood, B. Automatic waste detection by deep learning and disposal system design. J. Environ. Eng. Sci. 2019, 15, 38–44. [Google Scholar]
- Chu, Y.; Huang, C.; Xie, X.; Tan, B.; Kamal, S.; Xiong, X. Multilayer hybrid deep-learning method for waste classification and recycling. Comput. Intell. Neurosci. 2018, 2018, 5060857. [Google Scholar] [CrossRef]
- Tiyajamorn, P.; Lorprasertkul, P.; Assabumrungrat, R.; Poomarin, W.; Chancharoen, R. Automatic Trash Classification using Convolutional Neural Network Machine Learning. In Proceedings of the 2019 IEEE International Conference on Cybernetics and Intelligent Systems (CIS) and IEEE Conference on Robotics, Automation and Mechatronics (RAM), Bangkok, Thailand, 18–20 November 2019; pp. 71–76. [Google Scholar]
- Yu, Y. A Computer Vision Based Detection System for Trash Bins Identification during Trash Classification. J. Phys. Conf. Ser. 2020, 1617, 012015. [Google Scholar]
- Ruiz, V.; Sánchez, Á.; Vélez, J.F.; Raducanu, B. Automatic image-based waste classification. In Proceedings of the International Work-Conference on the Interplay between Natural and Artificial Computation, Almeria, Spain, 3–7 June 2019; pp. 422–431. [Google Scholar]
- Chao, Y.W.; Vijayanarasimhan, S.; Seybold, B.; Ross, D.A.; Deng, J.; Sukthankar, R. Rethinking the faster r-cnn architecture for temporal action localization. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 1130–1139. [Google Scholar]
- Liu, L.; Wu, F.X.; Wang, Y.P.; Wang, J. Multi-Receptive-Field CNN for Semantic Segmentation of Medical Images. IEEE J. Biomed. Health Inform. 2020, 24, 3215–3225. [Google Scholar] [CrossRef]
- Liang, J.; Zhang, T.; Feng, G. Channel Compression: Rethinking Information Redundancy Among Channels in CNN Architecture. IEEE Access 2020, 8, 147265–147274. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, L.; Polosukhin, I. Attention is all you need. arXiv 2017, arXiv:1706.03762. [Google Scholar]
- Dosovitskiy, A.; Beyer, L.; Kolesnikov, A.; Weissenborn, D.; Zhai, X.; Unterthiner, T.; Dehghani, M.; Minderer, M.; Heigold, G.; Gelly, S.; et al. An image is worth 16 × 16 words: Transformers for image recognition at scale. arXiv 2020, arXiv:2010.11929. [Google Scholar]
- Yang, M.; Thung, G. Classification of trash for recyclability status. CS229 Proj. Rep. 2016, 2016, 1–6. [Google Scholar]
- Proença, P.F.; Simões, P. TACO: Trash Annotations in Context for Litter Detection. arXiv 2020, arXiv:2003.06975. [Google Scholar]
- Wang, T.; Cai, Y.; Liang, L.; Ye, D. A Multi-Level Approach to Waste Object Segmentation. Sensors 2020, 20, 3816. [Google Scholar] [CrossRef]
- Lynch, S. OpenLitterMap. com–open data on plastic pollution with blockchain rewards (littercoin). Open Geospat. Data Softw. Stand. 2018, 3, 1–10. [Google Scholar] [CrossRef]
- Wang, Q.; Li, B.; Xiao, T.; Zhu, J.; Li, C.; Wong, D.F.; Chao, L.S. Learning deep transformer models for machine translation. arXiv 2019, arXiv:1906.01787. [Google Scholar]
- Baevski, A.; Auli, M. Adaptive input representations for neural language modeling. arXiv 2018, arXiv:1809.10853. [Google Scholar]
- Aslam, F.A.; Mohammed, H.N.; Lokhande, P. Efficient way of web development using python and flask. Int. J. Adv. Res. Comput. Sci. 2015, 6, 54–57. [Google Scholar]
- Mufid, M.R.; Basofi, A.; Al Rasyid, M.U.H.; Rochimansyah, I.F. Design an mvc model using python for flask framework development. In Proceedings of the 2019 International Electronics Symposium (IES), Surabaya, Indonesia, 27–28 September 2019; pp. 214–219. [Google Scholar]
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Fei-Fei, L. Imagenet: A large-scale hierarchical image database. In Proceedings of the 2009 IEEE conference on computer vision and pattern recognition, Miami, FL, USA, 20–25 June 2009; pp. 248–255. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Bircanoğlu, C.; Atay, M.; Beşer, F.; Genç, Ö.; Kızrak, M.A. RecycleNet: Intelligent waste sorting using deep neural networks. In Proceedings of the 2018 Innovations in Intelligent Systems and Applications (INISTA), Thessaloniki, Greece, 3–5 July 2018; pp. 1–7. [Google Scholar]
- Meng, S.; Chu, W.T. A Study of Garbage Classification with Convolutional Neural Networks. In Proceedings of the 2020 Indo–Taiwan 2nd International Conference on Computing, Analytics and Networks (Indo-Taiwan ICAN), Rajpura, India, 7–15 February 2020; pp. 152–157. [Google Scholar]
- Aral, R.A.; Keskin, Ş.R.; Kaya, M.; Hacıömeroğlu, M. Classification of trashnet dataset based on deep learning models. In Proceedings of the 2018 IEEE International Conference on Big Data (Big Data), Seattle, WA, USA, 10–13 December 2018; pp. 2058–2062. [Google Scholar]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-excitation networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 7132–7141. [Google Scholar]
- Mao, W.L.; Chen, W.C.; Wang, C.T.; Lin, Y.H. Recycling waste classification using optimized convolutional neural network. Resour. Conserv. Recycl. 2021, 164, 105132. [Google Scholar] [CrossRef]
- Woo, S.; Park, J.; Lee, J.Y.; Kweon, I.S. Cbam: Convolutional block attention module. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 3–19. [Google Scholar]
- Huynh, M.H.; Pham-Hoai, P.T.; Tran, A.K.; Nguyen, T.D. Automated Waste Sorting Using Convolutional Neural Network. In Proceedings of the 2020 7th NAFOSTED Conference on Information and Computer Science (NICS), Ho Chi Minh City, Vietnam, 26–27 November 2020; pp. 102–107. [Google Scholar]
- Tan, M.; Le, Q.V. Efficientnetv2: Smaller models and faster training. arXiv 2021, arXiv:2104.00298. [Google Scholar]
- Thorpe, S.; Fize, D.; Marlot, C. Speed of processing in the human visual system. Nature 1996, 381, 520–522. [Google Scholar] [CrossRef] [PubMed]
- Sosa-Garcia, J.; Odone, F. “Hands on” visual recognition for visually impaired users. ACM Trans. Access. Comput. (TACCESS) 2017, 3, 1–30. [Google Scholar] [CrossRef]
- Kaggle. Drinking Waste Classification Dataset. 2020. Available online: https://www.kaggle.com/arkadiyhacks/drinking-waste-classification (accessed on 12 July 2020).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Accuracy (%) | Total Images | Inference Time per Image (ms) | Epoch |
|---|---|---|---|---|
| HOG + SVM [28] | 23.51 | 2276 train images, 251 test images 1 | - | - |
| SIFT + SVM [17] | 63 | 1769 train images, 758 test images 2 | - | - |
| Simple CNN [28] | 79.49 | 2276 train images, 251 test images | - | 40 |
| HOG CNN [28] | 81.53 | 2276 train images, 251 test images | - | 40 |
| Resnet50 w/o pre-train [28] | 58.70 | 2276 train images, 251 test images | - | 40 |
| Resnet50 [28] | 91.40 | 2276 train images, 251 test images | - | 40 |
| DenseNet121 [29] | 95 | 2527 (70% training, 17% testing, 13% valid) | - | 10 + 100 |
| DenseNet169 [29] | 95 | 2527 (70% training, 17% testing, 13% valid) | - | 7 + 120 |
| Inception V4 [29] | 94 | 2527 (70% training, 17% testing, 13% valid) | - | 7 + 120 |
| Inception V4 [29] | 89 | 2527 (70% training, 17% testing, 13% valid) | - | 10 + 200 |
| MobileNet [29] | 84 | 2527 (70% training, 17% testing, 13% valid) | - | 10 + 200 |
| ResNet18 + SE [30] | 87.70 | 2527 (70% training, 17% testing, 13% valid) | - | 100 |
| ResNet34 + SE [30] | 88.86 | 2527 (70% training, 17% testing, 13% valid) | - | 100 |
| ResNet50 + SE [30] | 91.88 | 2527 (70% training, 17% testing, 13% valid) | - | 100 |
| ResNet18 + CBAM [32] | 79.81 | 2527 (70% training, 17% testing, 13% valid) | - | 100 |
| ResNet34 + CBAM [32] | 81.44 | 2527 (70% training, 17% testing, 13% valid) | - | 100 |
| ResNet50 + CBAM [32] | 82.14 | 2527 (70% training, 17% testing, 13% valid) | - | 100 |
| ResNet18 + RecycleNet [27] | 93.04 | 2527 (70% training, 17% testing, 13% valid) | 231 3 | 100 |
| ResNet34 + RecycleNet [27] | 93.97 | 2527 (70% training, 17% testing, 13% valid) | 352 | 100 |
| ResNet50 + RecycleNet [27] | 94.20 | 2527 (70% training, 17% testing, 13% valid) | 366 | 100 |
| Optimized DenseNet121 [31] | 94.02 | 2276 train images, 251 test images | - | 40 |
| EfficientNet-B0 [33] | 90.02 | 2527 (70% training, 17% testing, 13% valid) | - | - |
| EfficientNet-B1 [33] | 91.53 | 2527 (70% training, 17% testing, 13% valid) | - | - |
| EfficientNet-V2 [34] | 94.69 | 2527 (70% training, 17% testing, 13% valid) | - | - |
| Vision transformer w/o pre-train | 89.06 | 2527 (70% training, 17% testing, 13% valid) | - | 40 |
| Vision transformer | 96.98 | 2527 (70% training, 17% testing, 13% valid) | 423 | 40 |
| Ground Truth | Cardboard | Glass | Metal | Paper | Plastic | Trash | |
|---|---|---|---|---|---|---|---|
| Predicted | |||||||
| Cardboard | 69 | 0 | 0 | 0 | 0 | 0 | |
| Glass | 0 | 78 | 0 | 0 | 2 | 0 | |
| Metal | 1 | 1 | 67 | 0 | 0 | 0 | |
| Paper | 0 | 0 | 1 | 104 | 1 | 0 | |
| Plastic | 0 | 3 | 0 | 4 | 71 | 0 | |
| Trash | 0 | 0 | 0 | 0 | 0 | 29 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, K.; Lei, H.; Jiao, Z.; Zhong, Z. Recycling Waste Classification Using Vision Transformer on Portable Device. Sustainability 2021, 13, 11572. https://doi.org/10.3390/su132111572
Huang K, Lei H, Jiao Z, Zhong Z. Recycling Waste Classification Using Vision Transformer on Portable Device. Sustainability. 2021; 13(21):11572. https://doi.org/10.3390/su132111572
Chicago/Turabian StyleHuang, Kai, Huan Lei, Zeyu Jiao, and Zhenyu Zhong. 2021. "Recycling Waste Classification Using Vision Transformer on Portable Device" Sustainability 13, no. 21: 11572. https://doi.org/10.3390/su132111572
APA StyleHuang, K., Lei, H., Jiao, Z., & Zhong, Z. (2021). Recycling Waste Classification Using Vision Transformer on Portable Device. Sustainability, 13(21), 11572. https://doi.org/10.3390/su132111572