
Autonomous Vessels in the Yangtze River: A Study on the Maritime Accidents Using Data-Driven Bayesian Networks


Abstract
:1. Introduction
2. Literature Review
2.1. Autonomous Vessel Operation Risks
2.2. Maritime Accident Research
2.3. Risk Analysis Based on BN
3. Methodology
3.1. Bayesian Network
3.2. Network Training
3.3. Mutual Information
4. Implementations
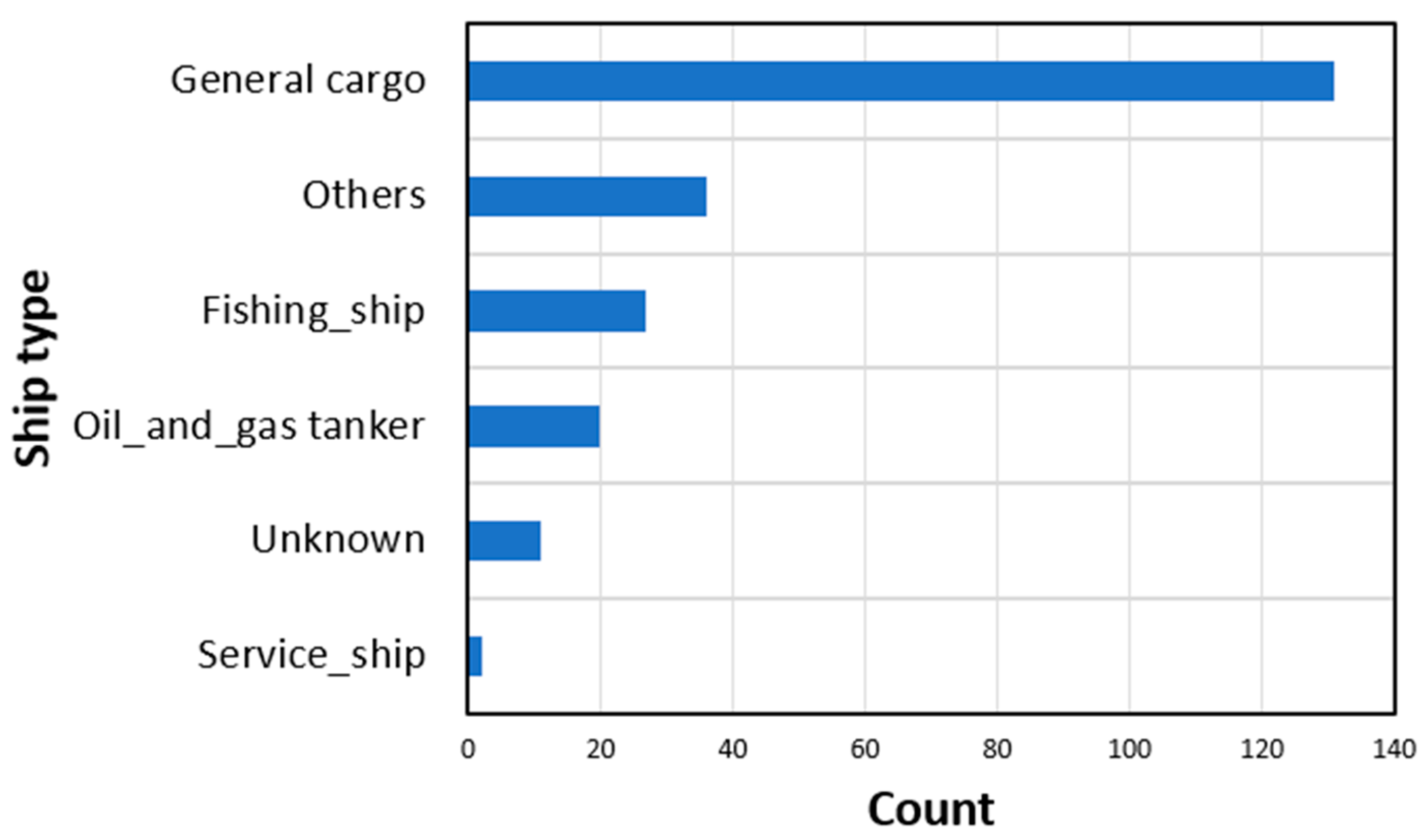
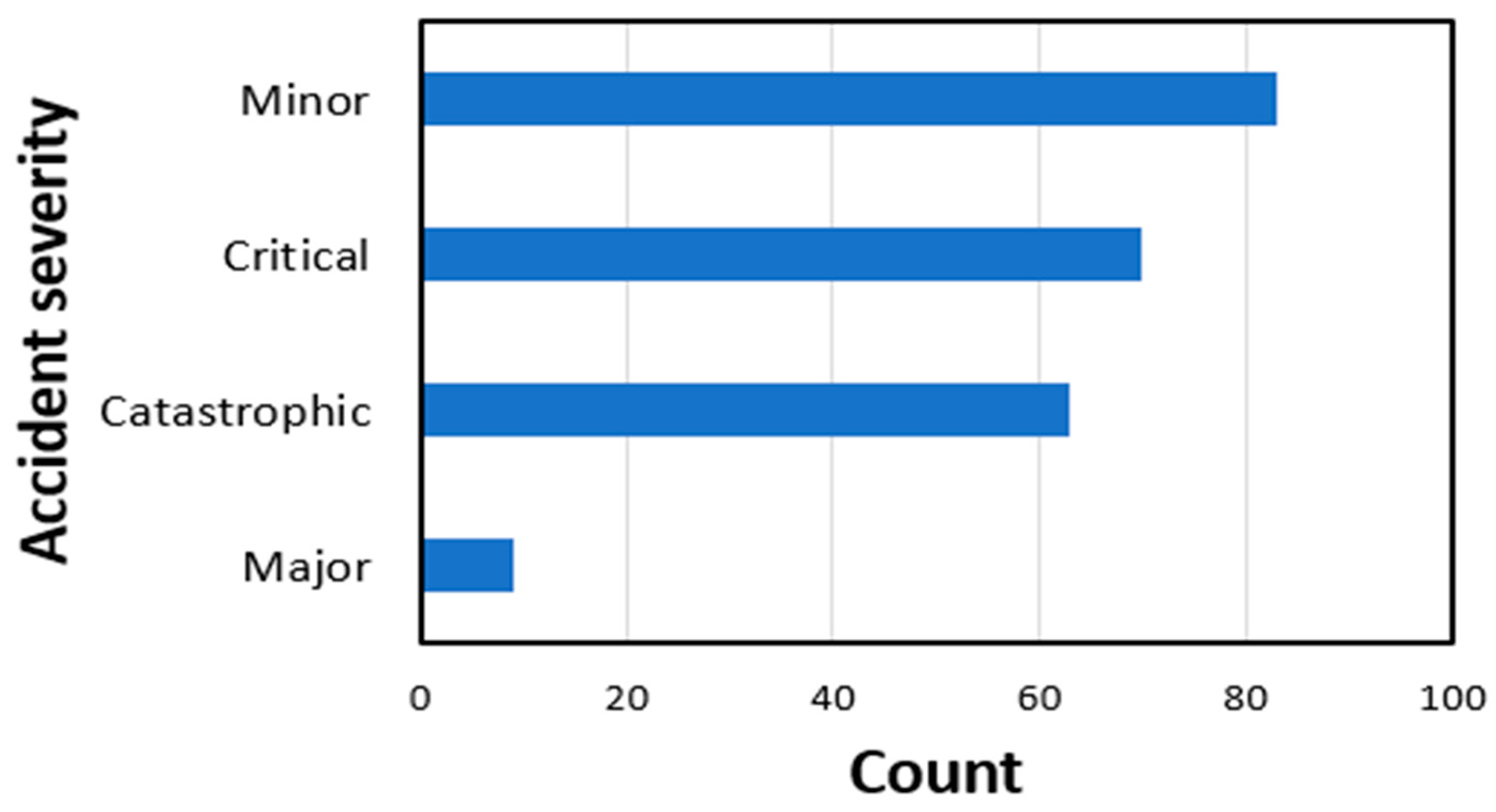
4.1. Data Collection
4.2. Dataset Establishment
- The factor appearance frequency in accident records should be considered to eliminate the trivial factors.
- Some factors with the same or similar properties should be merged (e.g., Typhoon, a huge wave, and sea ice are merged as extreme weather conditions).
- All factors can be categorized to discuss the impact magnitudes from human, ship, environment, and management factors.
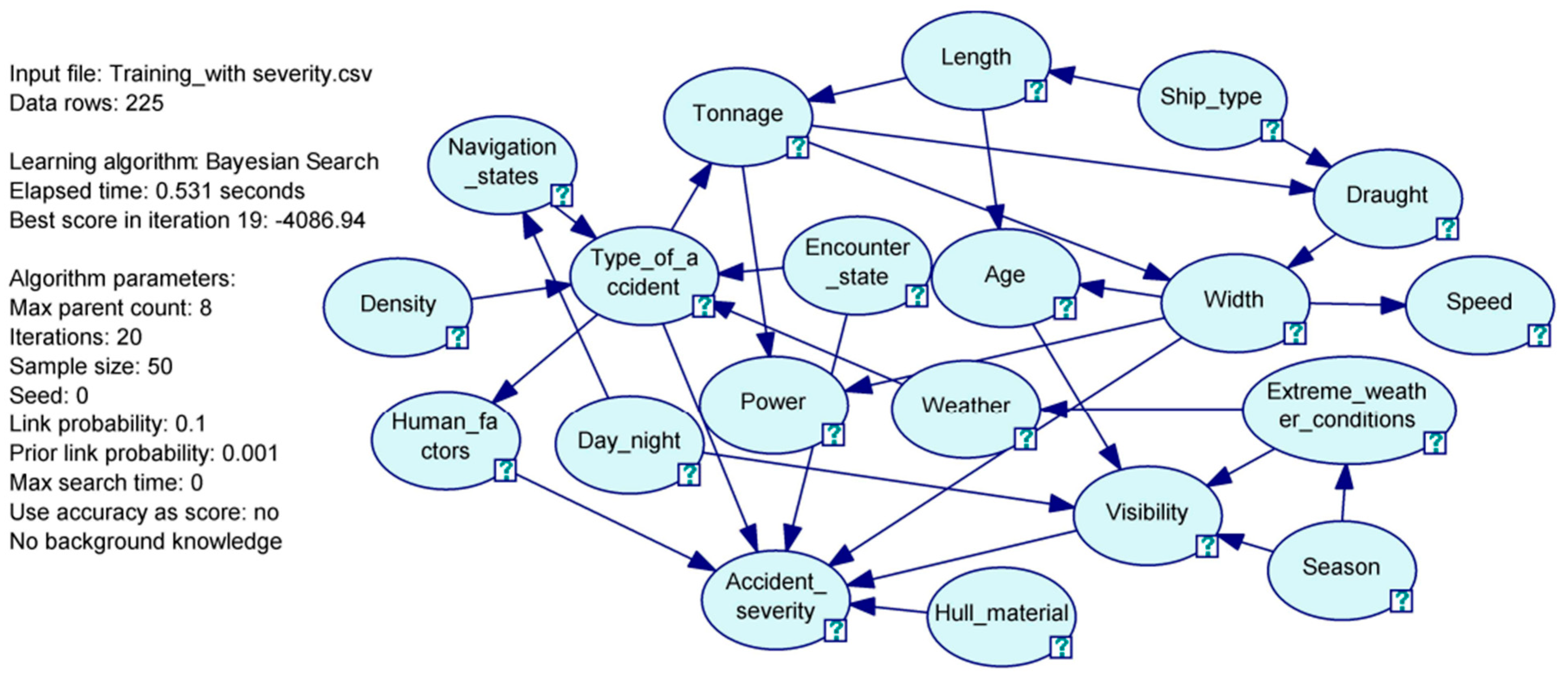
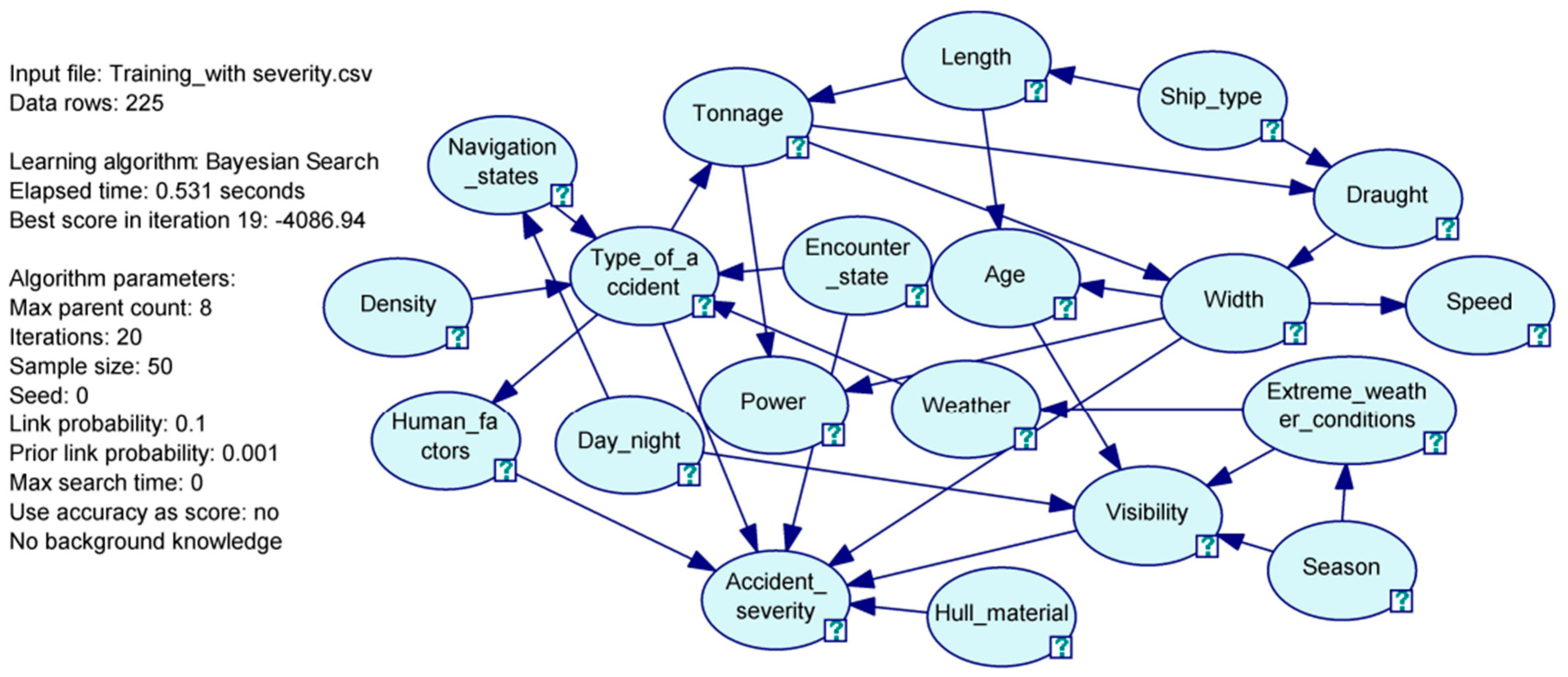
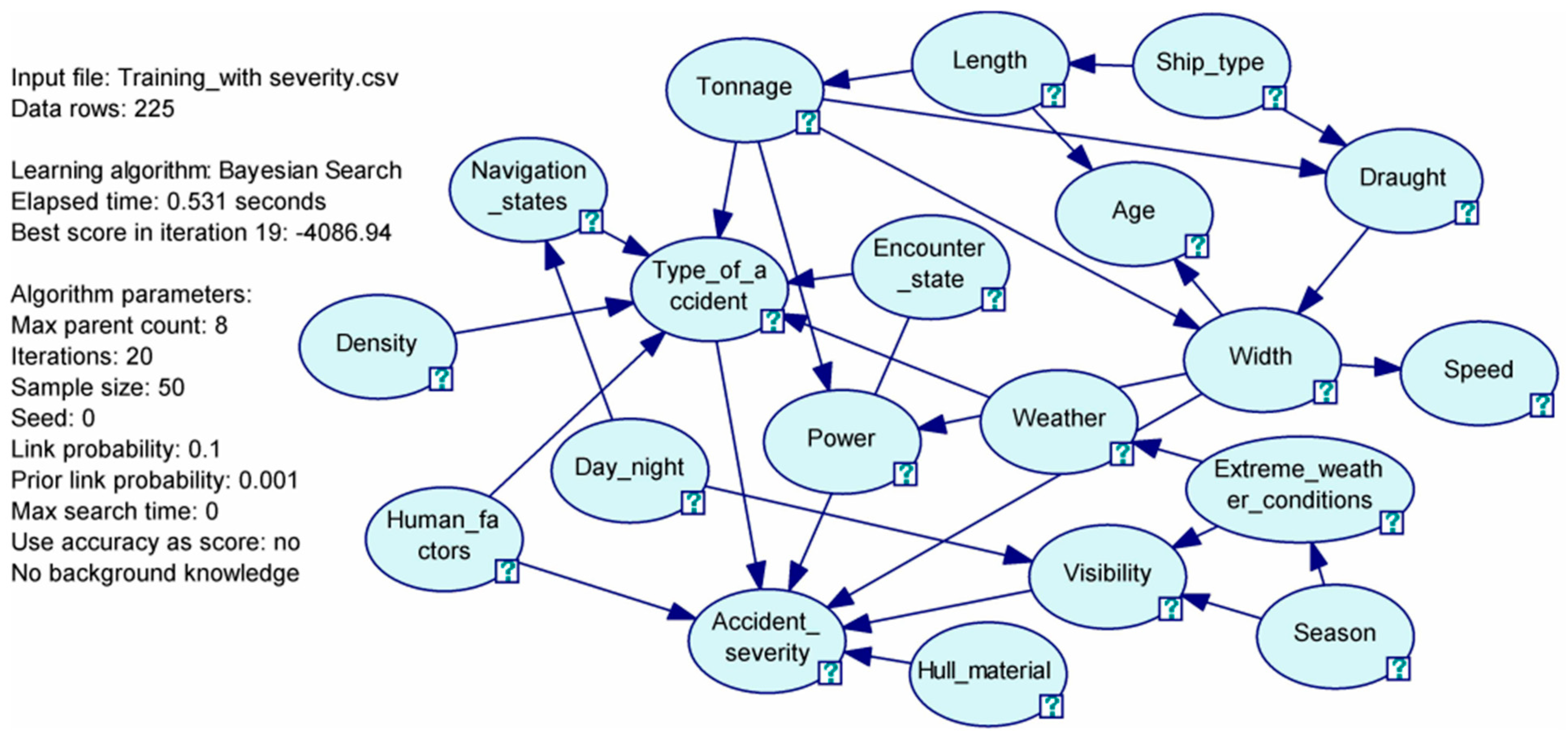
4.3. Structure Learning
4.4. Structure Validation
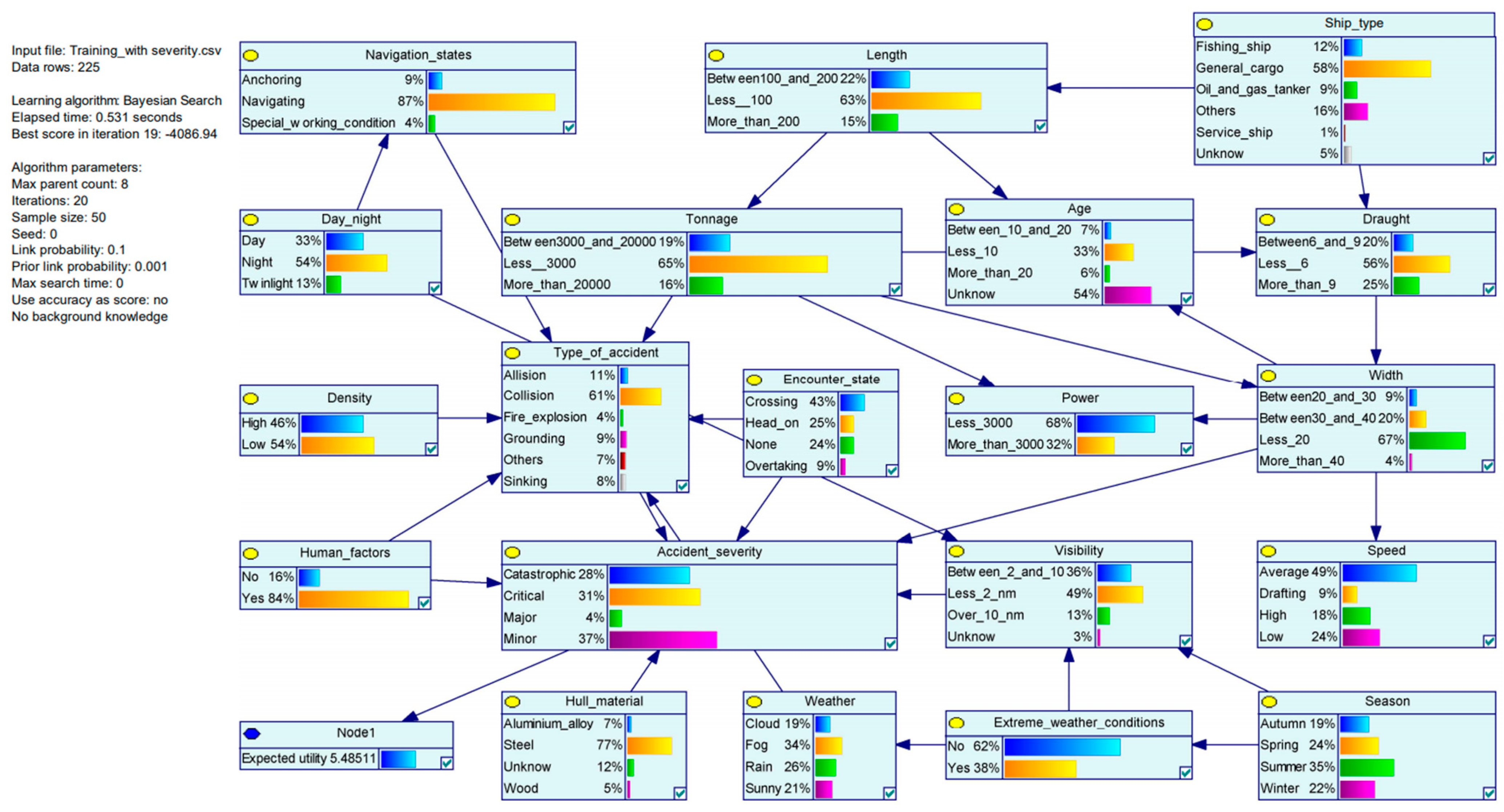
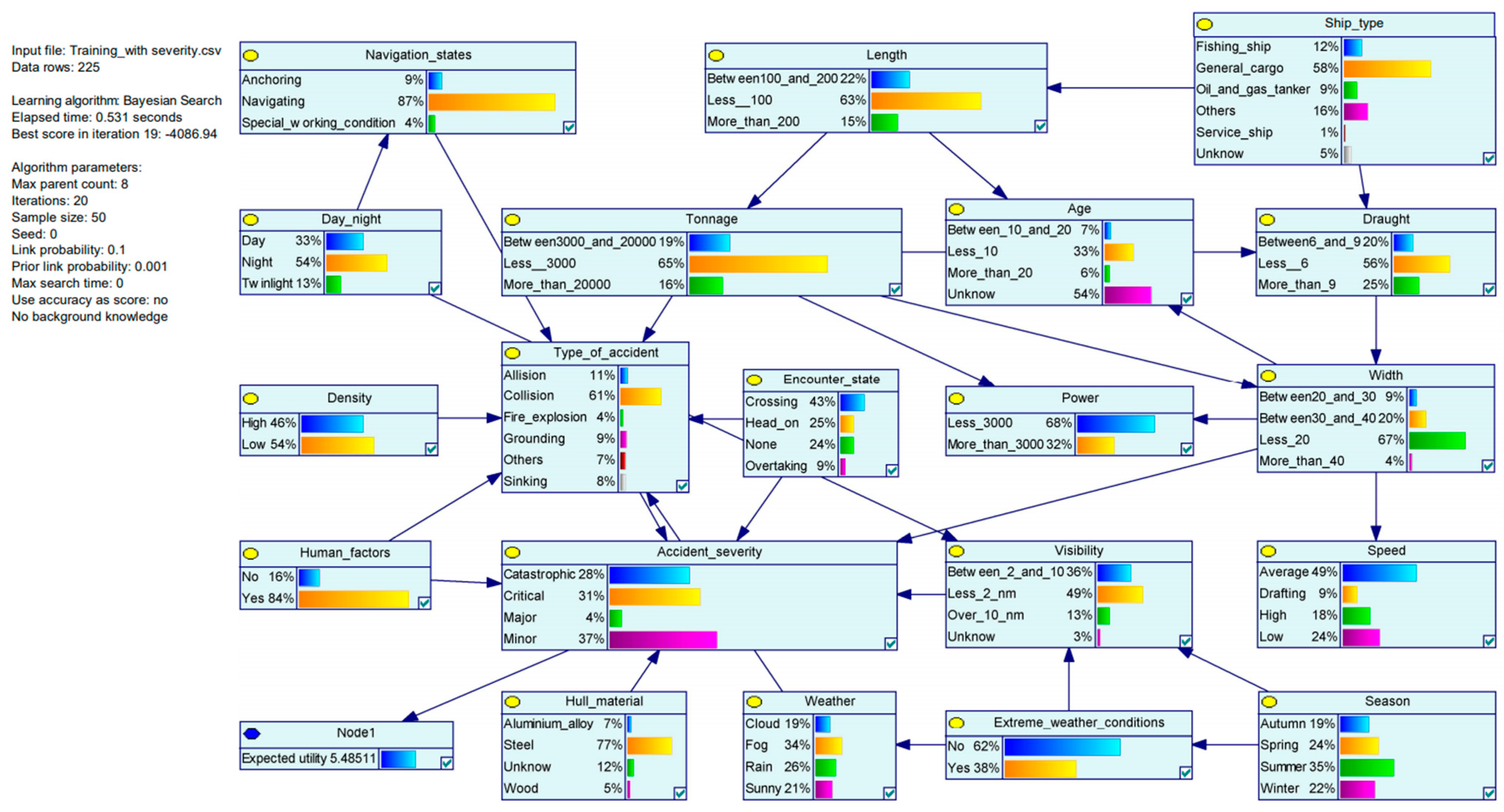
4.5. Probability Learning
4.6. Content Validation
- As the encounter states are the main factors leading to high risk of accident, any domain invaders or misbehavers will threaten maritime safety for autonomous vessels.
- Vessels encountering small ships could lead to a high risk of collision, in which the consequence may minor but the frequency is relatively high.
- Although the autonomous vessel can avoid having crews onboard, thereby reducing the impact from human factors, the result shows the reduction of accident frequency may not significant as other remaining critical situations (e.g., critical weather, congested waters).
5. Discussion
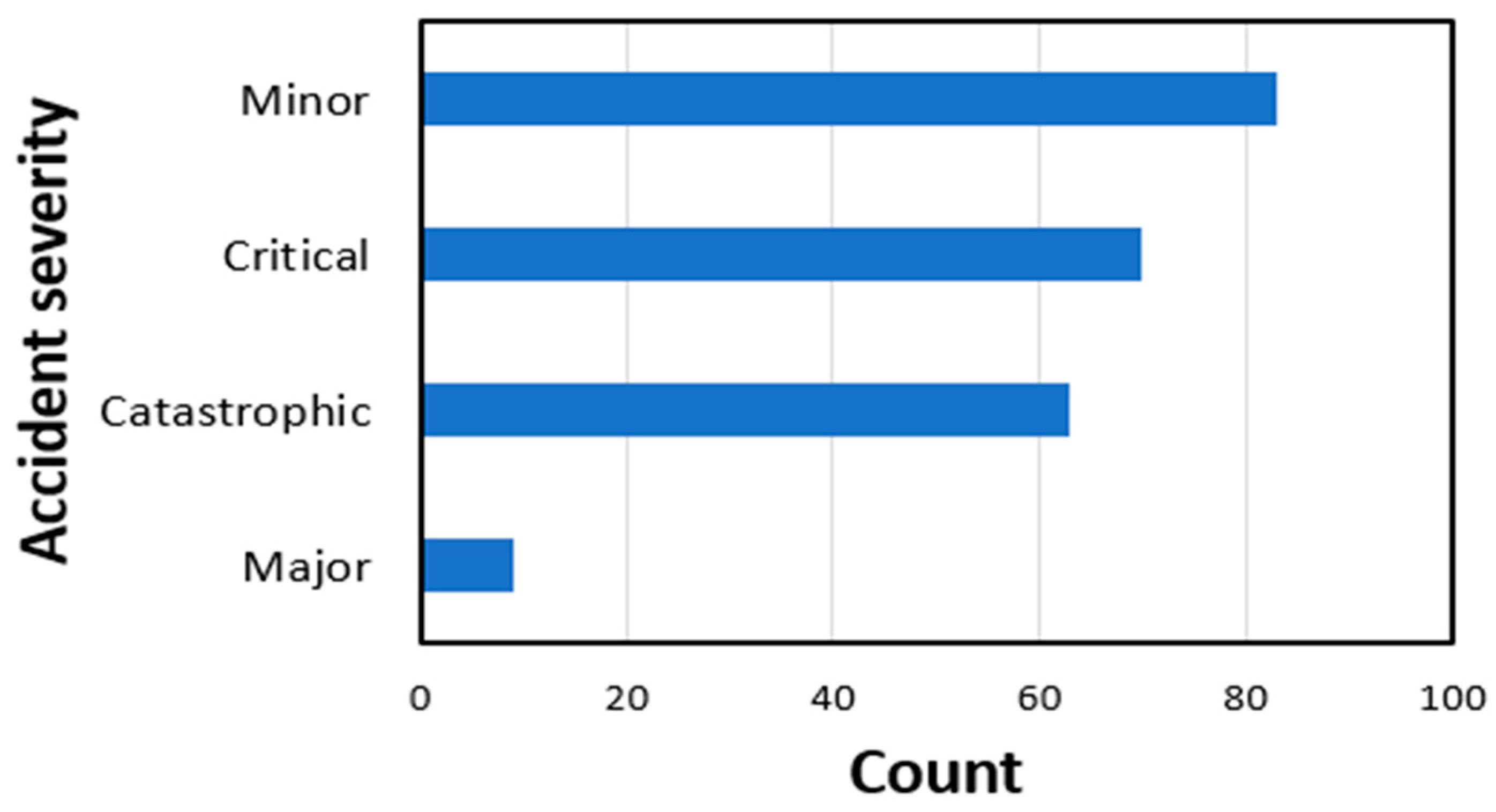
5.1. Major Accident for Autonomous Vessels
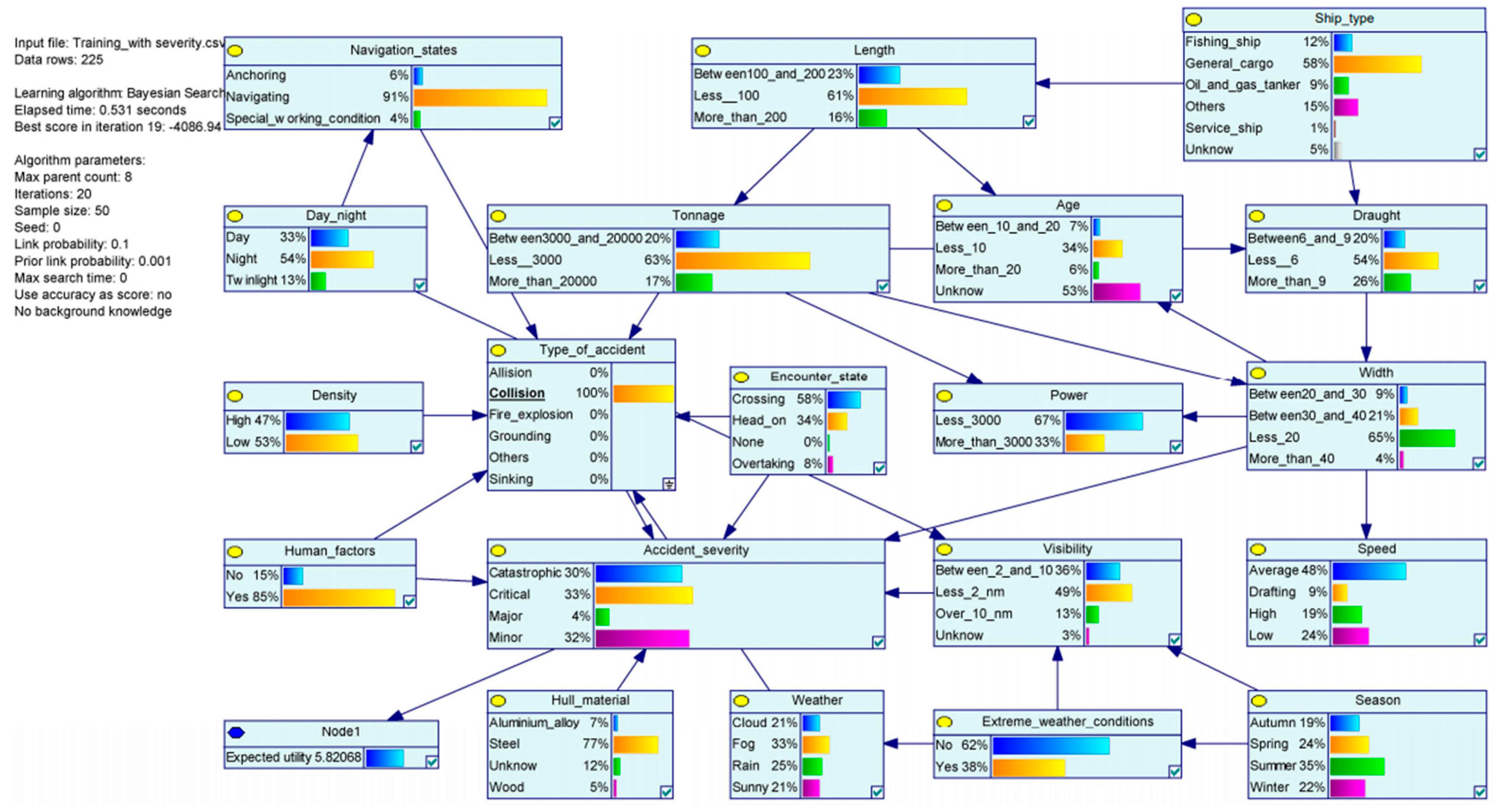
5.2. Scenario Analysis
5.2.1. Scenario One: An Autonomous Vessel under Critical Nature Environments
5.2.2. Scenario Two: With or without a Human Error Occurring
5.3. Recommendations
6. Conclusions
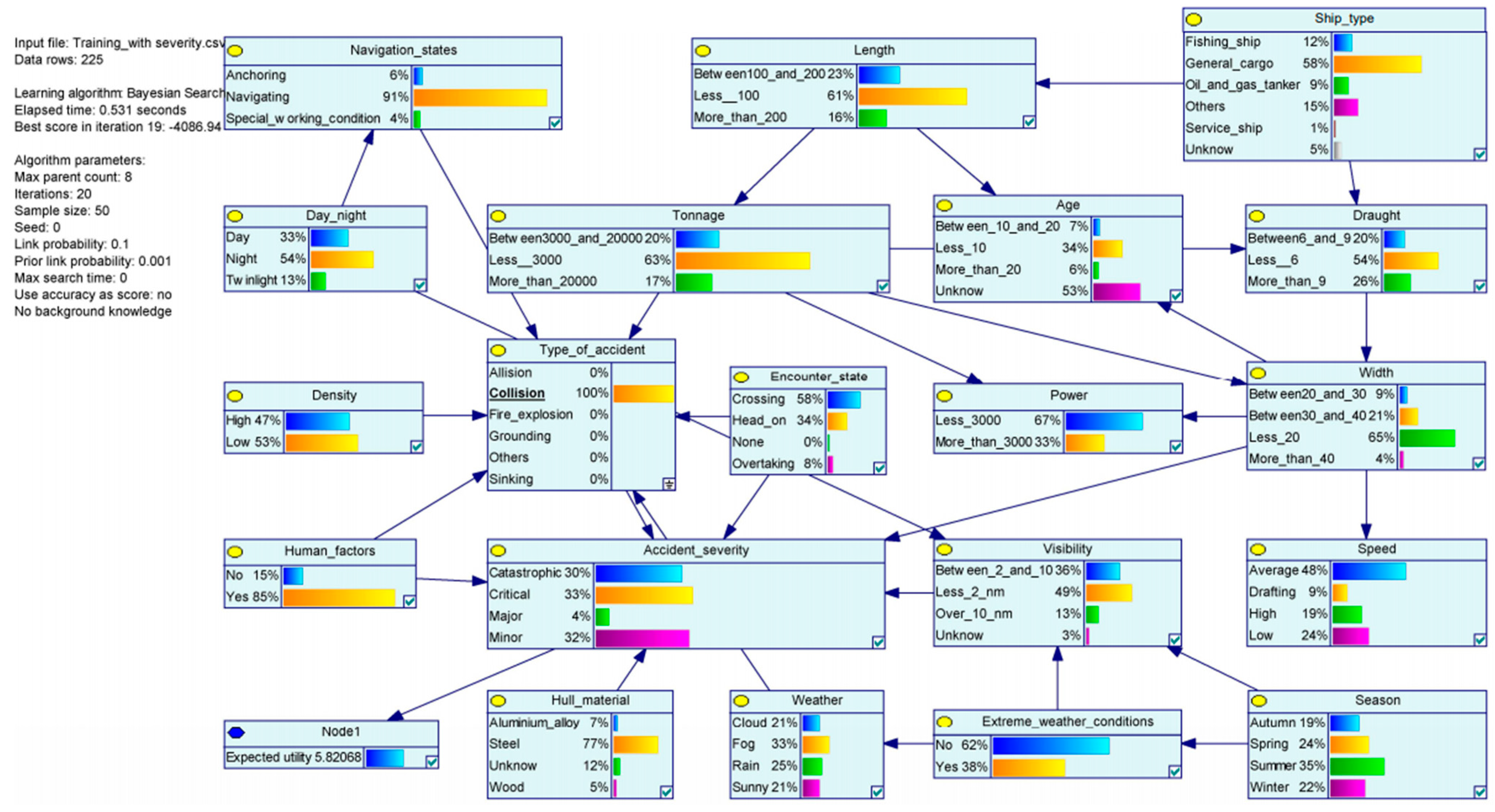
- Collision accidents make up the majority of accident that occurred in the Yangtze River, and they mostly happen to small autonomous vessels.
- The use of an autonomous vessel can ease the impacts from ‘Human factors’, ‘Day/night’ and ‘Visibility’, which are proven to be the important RIFs that affect maritime accidents.
- In terms of the collision risk, the autonomous vessels could face a higher risk of accidents under crossing situations when the ships giving way fail to take sufficient collision avoidance measures. Moreover, bad weather, e.g., rain and heavy sea conditions exacerbate the risk.
- Although the benefits of using autonomous vessels in the Yangtze River are widely noted, for instance, increasing the transport capacity, reducing collision risk, other accident risks may rise due to the lack of supervision onboard.
- Although autonomous ships have eliminated human factors, the risk of accidents has not been reduced because of the relationship between human factors and the accident severity.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Abilio Ramos, M.; Utne, I.B.; Mosleh, A. Collision avoidance on maritime autonomous surface ships: Operators’ tasks and human failure events. Saf. Sci. 2019, 116, 33–44. [Google Scholar] [CrossRef]
- Ventikos, N.P.; Chmurski, A.; Louzis, K. A systems-based application for autonomous vessels safety: Hazard identification as a function of increasing autonomy levels. Saf. Sci. 2020, 131, 104919. [Google Scholar] [CrossRef]
- Wróbel, K.; Montewka, J.; Kujala, P. Towards the assessment of potential impact of unmanned vessels on maritime transportation safety. Reliab. Eng. Syst. Saf. 2017, 165, 155–169. [Google Scholar] [CrossRef]
- Porathe, T.; Rødseth, H.; Fjørtoft, K.; Johnsen, S.O. At least as safe as manned shipping? Autonomous shipping, at least as safe as manned shipping? Autonomous shipping, safety and ‘human error’. In Safety and Reliability—Safe Societies in a Changing World, 1st ed.; CRC Press: London, UK, 2018; pp. 417–426. [Google Scholar]
- Jalonen, R.; Tuominen, R.; Wahlström, M. Safety of Unmanned Ships: Safe Shipping with Autonomous and Remote Controlled Ships; Aalto University: Helsinki, Finland, 2017. [Google Scholar]
- Zhang, D.; Yan, X.P.; Yang, Z.L.; Wall, A.; Wang, J. Incorporation of formal safety assessment and Bayesian network in navigational risk estimation of the Yangtze River. Reliab. Eng. Syst. Saf. 2013, 118, 93–105. [Google Scholar] [CrossRef]
- Zhang, D.; Yan, X.; Yang, Z.; Wang, J. A subjective approach for evaluating navigational risk of yangtze river. In Proceedings of the 11th International Probabilistic Safety Assessment and Management Conference and the Annual European Safety and Reliability Conference 2012, PSAM11 ESREL 2012, Helsinki, Finland, 25–29 June 2012. [Google Scholar]
- Wang, L.; Yang, Z. Bayesian network modelling and analysis of accident severity in waterborne transportation: A case study in China. Reliab. Eng. Syst. Saf. 2018, 180, 277–289. [Google Scholar] [CrossRef]
- Zhang, D.; Yan, X.; Yang, Z.; Wang, J. An accident data—Based approach for congestion risk assessment of inland waterways : A Yangtze River case. J. Reliab. 2013, 288, 176–188. [Google Scholar] [CrossRef]
- Van Dorp, J.R.; Merrick, J.R.W. On a risk management analysis of oil spill risk using maritime transportation system simulation. Ann. Oper. Res. 2011, 187, 249–277. [Google Scholar] [CrossRef]
- Bye, R.J.; Aalberg, A.L. Maritime navigation accidents and risk indicators: An exploratory statistical analysis using AIS data and accident reports. Reliab. Eng. Syst. Saf. 2018, 176, 174–186. [Google Scholar] [CrossRef]
- Fan, S.; Blanco-Davis, E.; Yang, Z.; Zhang, J.; Yan, X. Incorporation of human factors into maritime accident analysis using a data-driven Bayesian network. Reliab. Eng. Syst. Saf. 2020, 203, 107070. [Google Scholar] [CrossRef]
- Jokioinen, E.; Poikonen, J.; Jalonen, R.; Saarni, J. Remote and Autonomous Ships—The Next Steps; AAWA Position Paper, Rolls Royce plc: London, UK, 2016. [Google Scholar]
- Dghaym, D.; Hoang, T.S.; Turnock, S.R.; Butler, M.; Downes, J.; Pritchard, B. An STPA-based formal composition framework for trustworthy autonomous maritime systems. Saf. Sci. 2021, 136, 105139. [Google Scholar] [CrossRef]
- Goerlandt, F. Maritime Autonomous Surface Ships from a risk governance perspective: Interpretation and implications. Saf. Sci. 2020, 128, 104758. [Google Scholar] [CrossRef]
- Huang, Y.; Van Gelder, P.H.A.M.J. Collision risk measure for triggering evasive actions of maritime autonomous surface ships. Saf. Sci. 2020, 127, 104708. [Google Scholar] [CrossRef]
- Utne, I.B.; Rokseth, B.; Sørensen, A.J.; Vinnem, J.E. Towards supervisory risk control of autonomous ships. Reliab. Eng. Syst. Saf. 2020, 196, 106757. [Google Scholar] [CrossRef]
- Chang, C.H.; Kontovas, C.; Yu, Q.; Yang, Z. Risk assessment of the operations of maritime autonomous surface ships. Reliab. Eng. Syst. Saf. 2020, 207, 107324. [Google Scholar] [CrossRef]
- Fan, C.; Wróbel, K.; Montewka, J.; Gil, M.; Wan, C.; Zhang, D. A framework to identify factors influencing navigational risk for Maritime Autonomous Surface Ships. Ocean Eng. 2020, 202, 107188. [Google Scholar] [CrossRef]
- Chian Tan, W.; Hian Chua, K.; Wu, Y. The Automated Risk Estimation for the Navigation of Autonomous Ships by Learning with Navigation Feature. Int. J. Comput. 2021, 18, 2041003. [Google Scholar] [CrossRef]
- Hu, S.; Li, Z.; Xi, Y.; Gu, X.; Zhang, X. Path analysis of causal factors influencing marine traffic accident via structural equation numerical modeling. J. Mar. Sci. Eng. 2019, 7, 96. [Google Scholar] [CrossRef] [Green Version]
- Fan, S.; Yang, Z.; Blanco-Davis, E.; Zhang, J.; Yan, X. Analysis of maritime transport accidents using Bayesian networks. Proc. Inst. Mech. Eng. J. Reliab. 2020, 234, 439–454. [Google Scholar] [CrossRef]
- Wang, S.; Yin, J.; Khan, R.U. The multi-state maritime transportation system risk assessment and safety analysis. Sustainability 2020, 12, 5728. [Google Scholar] [CrossRef]
- Di Nardo, M.; Murino, T. The system dynamics in the human reliability analysis through cognitive reliability and error analysis method: A case study of an LPG company. Int. Rev. Civ. Eng. 2021, 12, 56–68. [Google Scholar]
- Soner, O.; Asan, U.; Celik, M. Use of HFACS-FCM in fire prevention modelling on board ships. Saf. Sci. 2015, 77, 25–41. [Google Scholar] [CrossRef]
- Knapp, S.; Kumar, S.; Sakurada, Y.; Shen, J. Econometric analysis of the changing effects in wind strength and significant wave height on the probability of casualty in shipping. Accid. Anal. Prev. 2011, 43, 1252–1266. [Google Scholar] [CrossRef] [PubMed]
- Li, M.; Mou, J.; Liu, R.; Chen, P.; Dong, Z.; He, Y. Relational model of accidents and vessel traffic using AIS Data and GIS: A case study of the Western port of Shenzhen City. J. Mar. Sci. Eng. 2019, 7, 163. [Google Scholar] [CrossRef] [Green Version]
- Heij, C.; Knapp, S. Evaluation of safety and environmental risk at individual ship and company level. Transp. Res. Transp. Environ. 2012, 17, 228–236. [Google Scholar] [CrossRef]
- Balmat, J.F.; Lafont, F.; Maifret, R.; Pessel, N. A decision-making system to maritime risk assessment. Ocean Eng. 2011, 38, 171–176. [Google Scholar] [CrossRef]
- Talley, W.K.; Yip, T.L.; Jin, D. Determinants of vessel-accident bunker spills. Transp. Res. Transp. Environ. 2012, 17, 605–609. [Google Scholar] [CrossRef]
- Mullai, A.; Paulsson, U. A grounded theory model for analysis of marine accidents. Accid. Anal. Prev. 2011, 43, 1590–1603. [Google Scholar] [CrossRef] [Green Version]
- Sotiralis, P.; Ventikos, N.P.; Hamann, R.; Golyshev, P.; Teixeira, A.P. Incorporation of human factors into ship collision risk models focusing on human centred design aspects. Reliab. Eng. Syst. Saf. 2016, 156, 210–227. [Google Scholar] [CrossRef]
- Celik, M.; Lavasani, S.M.; Wang, J. A risk-based modelling approach to enhance shipping accident investigation. Saf. Sci. 2010, 48, 18–27. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, D.; Goerlandt, F.; Yan, X.; Kujala, P. Use of HFACS and fault tree model for collision risk factors analysis of icebreaker assistance in ice-covered waters. Saf. Sci. 2017, 111, 128–143. [Google Scholar] [CrossRef]
- Uğurlu, Ö.; Köse, E.; Yıldırım, U.; Yüksekyıldız, E. Marine accident analysis for collision and grounding in oil tanker using FTA method. Marit. Policy Manag. 2013, 42, 163–185. [Google Scholar] [CrossRef]
- Weber, P.; Medina-Oliva, G.; Simon, C.; Iung, B. Overview on Bayesian networks applications for dependability, risk analysis and maintenance areas. Eng. Appl. Artif. Intell. 2012, 25, 671–682. [Google Scholar] [CrossRef] [Green Version]
- Trucco, P.; Cagno, E.; Ruggeri, F.; Grande, O.A. Bayesian Belief Network modelling of organisational factors in risk analysis: A case study in maritime transportation. Reliab. Eng. Syst. Saf. 2008, 93, 845–856. [Google Scholar] [CrossRef]
- Cooper, G.F.; Herskovits, E. Bayesian Method for the Induction of Probabilistic Networks from Data. Mach. Learn. 1992, 9, 309–347. [Google Scholar] [CrossRef]
- Yu, Q.; Liu, K.; Yang, Z.; Wang, H.; Yang, Z. Geometrical risk evaluation of the collisions between ships and offshore installations using rule-based Bayesian reasoning. Reliab. Eng. Syst. Saf. 2021, 210, 107474. [Google Scholar] [CrossRef]
- Zhang, J.; Teixeira, P.; Soares, C.G.; Yan, X.; Liu, K. Maritime Transportation Risk Assessment of Tianjin Port. Risk. Anal. 2016, 36, 1171–1187. [Google Scholar]
- Yu, Q.; Liu, K.; Chang, C.; Yang, Z. Realising advanced risk assessment of vessel traffic flows near offshore wind farms. Reliab. Eng. Syst. Saf. 2020, 203, 107086. [Google Scholar] [CrossRef]
- Zhang, J.; Yan, X.; Zhang, D.; Haugen, S.; Yang, X. Safety management performance assessment for Maritime Safety Administration (MSA) by using generalized belief rule base methodology. Saf. Sci. 2014, 63, 157–167. [Google Scholar] [CrossRef]
- European Maritime Safety Agency. Annual Overview of Marine Casualties and Incidents. European Union. 2020. Available online: http://www.emsa.europa.eu/newsroom/latest-news/item/4266-annual-overview-of-marine-casualties-and-incidents-2020.html (accessed on 4 September 2021).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Literature Sources | Ship Type | Ship Age | Ship Flag | Ship Speed | Tonnage | Rain, Fog, Wind | Visibility | Location | Season | Time of a Day | Human Factors |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Wang et al. [23] | √ | √ | √ | √ | |||||||
| Hu et al. [21] | √ | √ | |||||||||
| Wang and Yang [8] | √ | √ | √ | √ | √ | √ | |||||
| Fan et al. [12] | √ | √ | √ | √ | √ | √ | √ | ||||
| Heij and Knapp [28] | √ | ||||||||||
| Knapp et al. [26] | √ | √ | |||||||||
| Balmat et al. [29] | √ | √ | √ | ||||||||
| Talley et al. [30] | √ | ||||||||||
| Li et al. [27] | √ | √ | |||||||||
| Mullai and Paulsson [31] | √ | √ | |||||||||
| Sotiralis et al. [32] | √ |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
|---|---|---|---|---|---|---|---|---|---|---|
| Human error () | Yes | No | Yes | Yes | Yes | No | Yes | No | Yes | Yes |
| Accident () | Yes | Yes | No | Yes | Yes | No | Yes | Yes | Yes | Yes |
| Number | Factors | Unit | Descriptions |
|---|---|---|---|
| 1 | Length | metre | Less 100, Between 100 and 200, More than 200 |
| 2 | Width | metre | Less 20, Between 20 and 30, Between 30 and 40, More than 40 |
| 3 | Tonnage | ton | Less 3000, Between 3000 and 20000, More than 20000 |
| 4 | Draught | metre | Less 6, Between 6 and 9, More than 9 |
| 5 | Power | kilowatt | Less 3000, More than 3000 |
| 6 | Ship type | Oil and gas tanker, General cargo, Fishing ship, Service ship, Others | |
| 7 | Hull material | Steel, aluminium alloy, wood | |
| 8 | Age | year | Less 10, Between 10 and 20, More than 20 |
| 9 | Season | Spring, Summer, Autumn, Winter | |
| 10 | Day/Night | Day (8:00–17:00), Night (19:00–5:00), Twilight (5:00–7:00 and 17:00–19:00) | |
| 11 | Speed | knot | Low (2–6), Average (6–12), High (greater than 12) |
| 12 | Encounter state | Crossing, Head on, Overtaking, None | |
| 13 | Density | High, Low | |
| 14 | Navigation states | Navigating, Anchoring, Special working conditions | |
| 15 | Weather | Cloud, Wind, Rain, Fog | |
| 16 | Extreme weather conditions | Yes, No | |
| 17 | Visibility | nautical miles (nm) | Less 2, Between 2 and 10, over 10 |
| 18 | Type of accident | Collision, Allision, Grounding, Fire/explosion, Sinking, Others | |
| 19 | Human factors | Yes, No |
| Minor | Major | Critical | Catastrophic | |
|---|---|---|---|---|
| Ships over 3000 gross tonnage | Below minor accident | Serious injury, or economic loss between 500 k * and 3000 k | 1–2 fatalities, or economic loss between 3000 k and 5000 k | Over 2 fatalities, or economic loss over 5000 |
| Ships between 500 and 3000 | Below minor accident | Serious injury, or economic loss between 200 k and 500 k | 1–2 fatalities, or economic loss between 500 k and 3000 k | Over 2 fatalities, or economic loss over 3000 |
| Ships below 500 gross tonnage | Below minor accident | Serious injury, or economic loss between 100 k and 200 k | 1–2 fatalities, or economic loss between 200 k and 500 k | Over 2 fatalities, or economic loss over 500 k |
| Factor | Entropy Value | (Percent) Ratio |
|---|---|---|
| Accident severity | 1.73 | 100 |
| Encounter state | 0.342 | 19.77 |
| Hull material | 0.286 | 16.53 |
| Tonnage | 0.158 | 9.13 |
| Width | 0.158 | 9.13 |
| Ship type | 0.133 | 7.69 |
| Length | 0.118 | 6.82 |
| Human factors | 0.053 | 3.06 |
| Draught | 0.026 | 1.50 |
| Navigation states | 0.023 | 1.33 |
| Weather | 0.016 | 0.92 |
| Density | 0.015 | 0.87 |
| Type of accident | 0.015 | 0.87 |
| Season | 0.009 | 0.52 |
| Visibility | 0.008 | 0.46 |
| Day/night | 0.004 | 0.23 |
| Extreme weather conditions | 0.004 | 0.23 |
| Power | ||
| Speed | ||
| Age |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, X.; Yuan, H.; Yu, Q. Autonomous Vessels in the Yangtze River: A Study on the Maritime Accidents Using Data-Driven Bayesian Networks. Sustainability 2021, 13, 9985. https://doi.org/10.3390/su13179985
Zhao X, Yuan H, Yu Q. Autonomous Vessels in the Yangtze River: A Study on the Maritime Accidents Using Data-Driven Bayesian Networks. Sustainability. 2021; 13(17):9985. https://doi.org/10.3390/su13179985
Chicago/Turabian StyleZhao, Xiaoyuan, Haiwen Yuan, and Qing Yu. 2021. "Autonomous Vessels in the Yangtze River: A Study on the Maritime Accidents Using Data-Driven Bayesian Networks" Sustainability 13, no. 17: 9985. https://doi.org/10.3390/su13179985
APA StyleZhao, X., Yuan, H., & Yu, Q. (2021). Autonomous Vessels in the Yangtze River: A Study on the Maritime Accidents Using Data-Driven Bayesian Networks. Sustainability, 13(17), 9985. https://doi.org/10.3390/su13179985