
An Ensemble 3D Convolutional Neural Network for Spatiotemporal Soil Temperature Forecasting


Abstract
:1. Introduction
2. Materials and Methods
2.1. Experimental Data
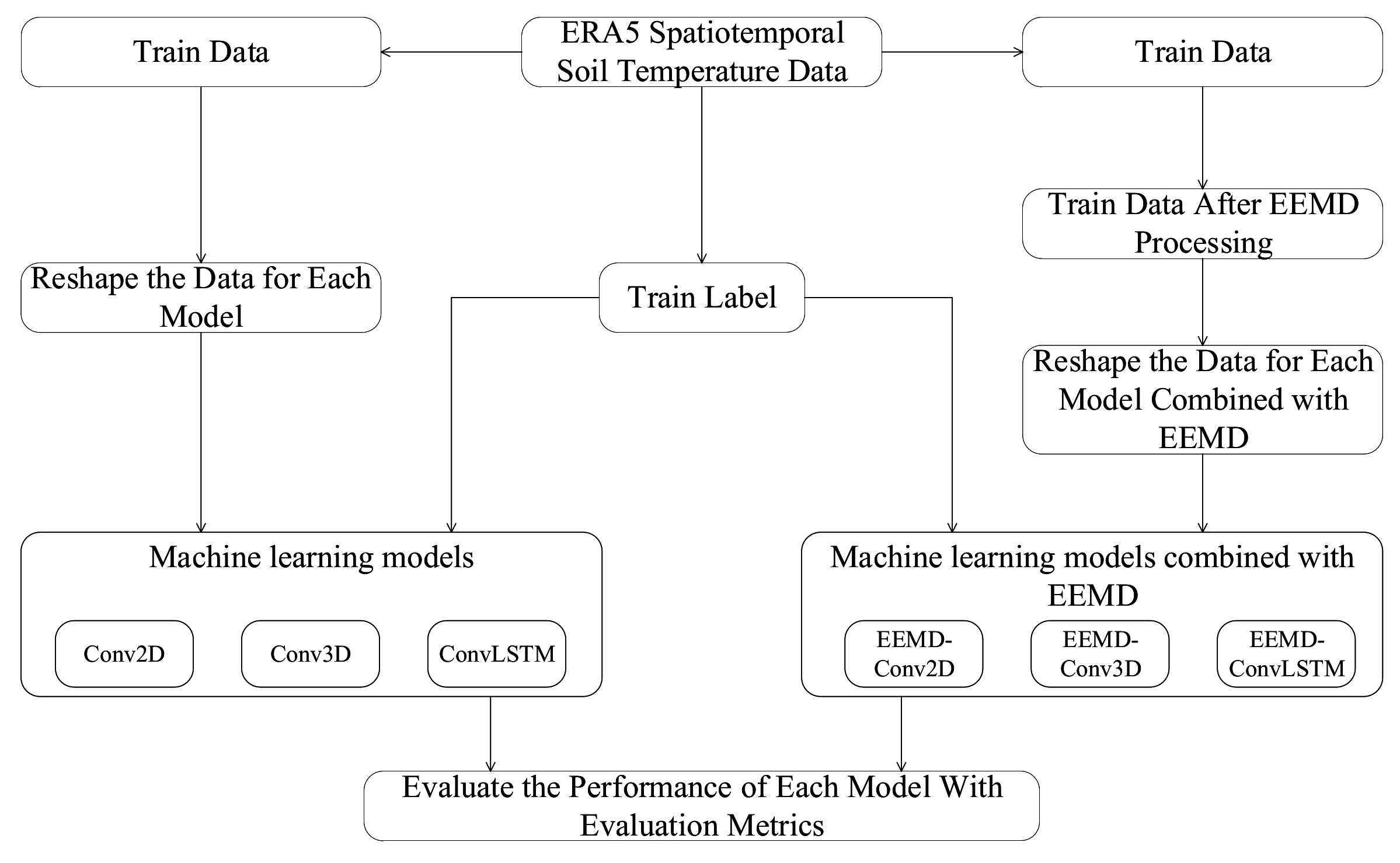
2.2. Methods
2.2.1. Ensemble Empirical Mode Decomposition (EEMD)
- Find all extreme value points of the signal x (t).
- Fit the envelopes emax (t) and emin (t) of the upper and lower extremal points with cubic spline fitting and find the average of two envelope lines m (t), then subtract m (t) in x (t):h (t) = x (t) − m (t).
- Determine whether h (t) is IMF according to the preset criterion.
- If not, replace x (t) with h (t) and repeat the above steps until h (t) satisfies the criterion, then h (t) is the IMF Ck (t) to be extracted.
- Every time an IMF is obtained, it is subtracted from the original signal, and the above steps are repeated; until the last remaining part of the signal rn (t) is just a monotonic sequence or a constant value sequence.
- Add normally distributed white noise to the original signal.
- The signal with white noise is taken as a whole and decomposed into IMF using EMD.
- Repeat the previous steps, adding a different sequence of normally distributed white noise to the original signal each time.
- The IMF obtained each time will be integrated and averaged as the final result.
2.2.2. Convolutional Neural Network (CNN)
2.2.3. Convolutional LSTM Network (ConvLSTM)
2.2.4. Model Training and Test
3. Results and Discussion
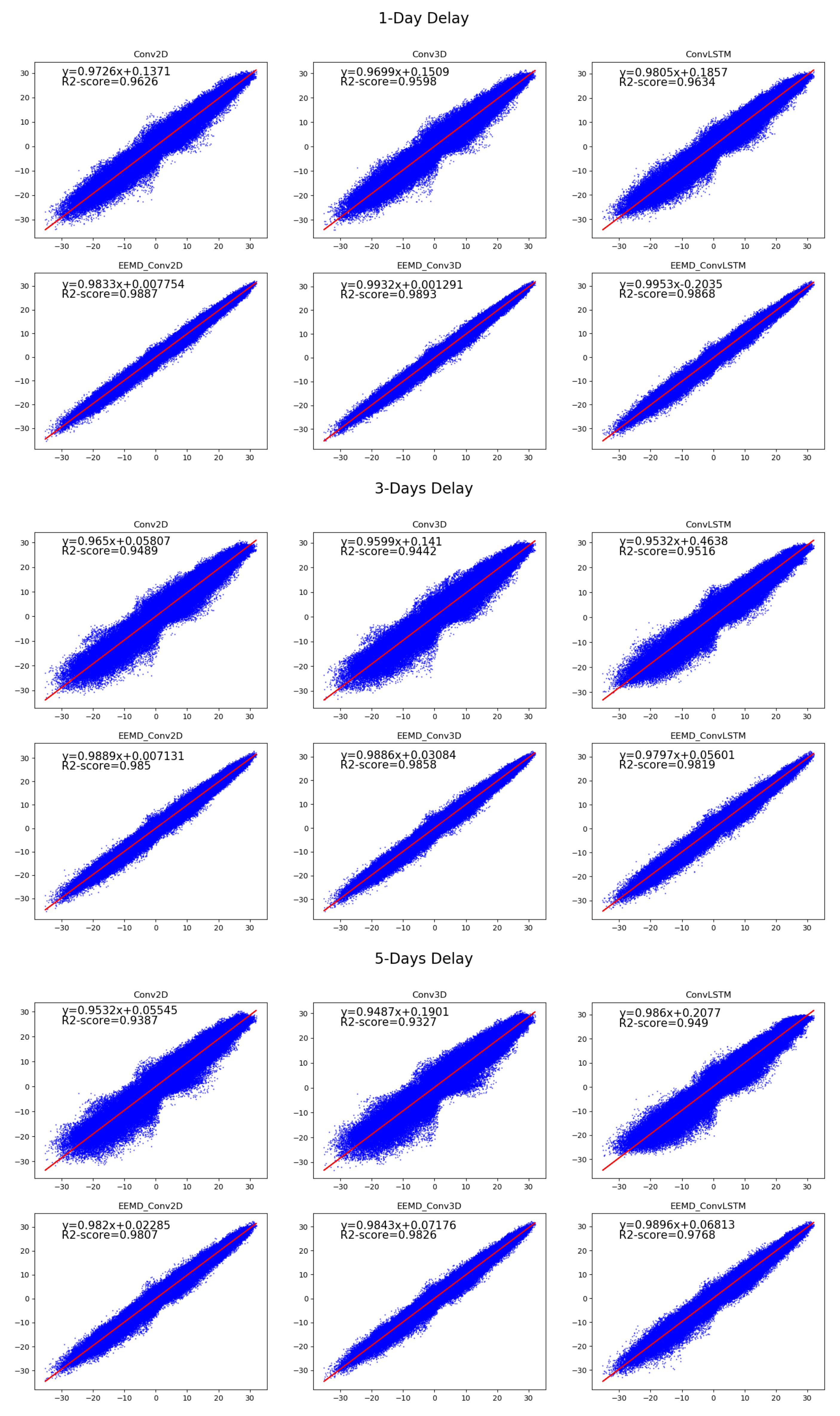
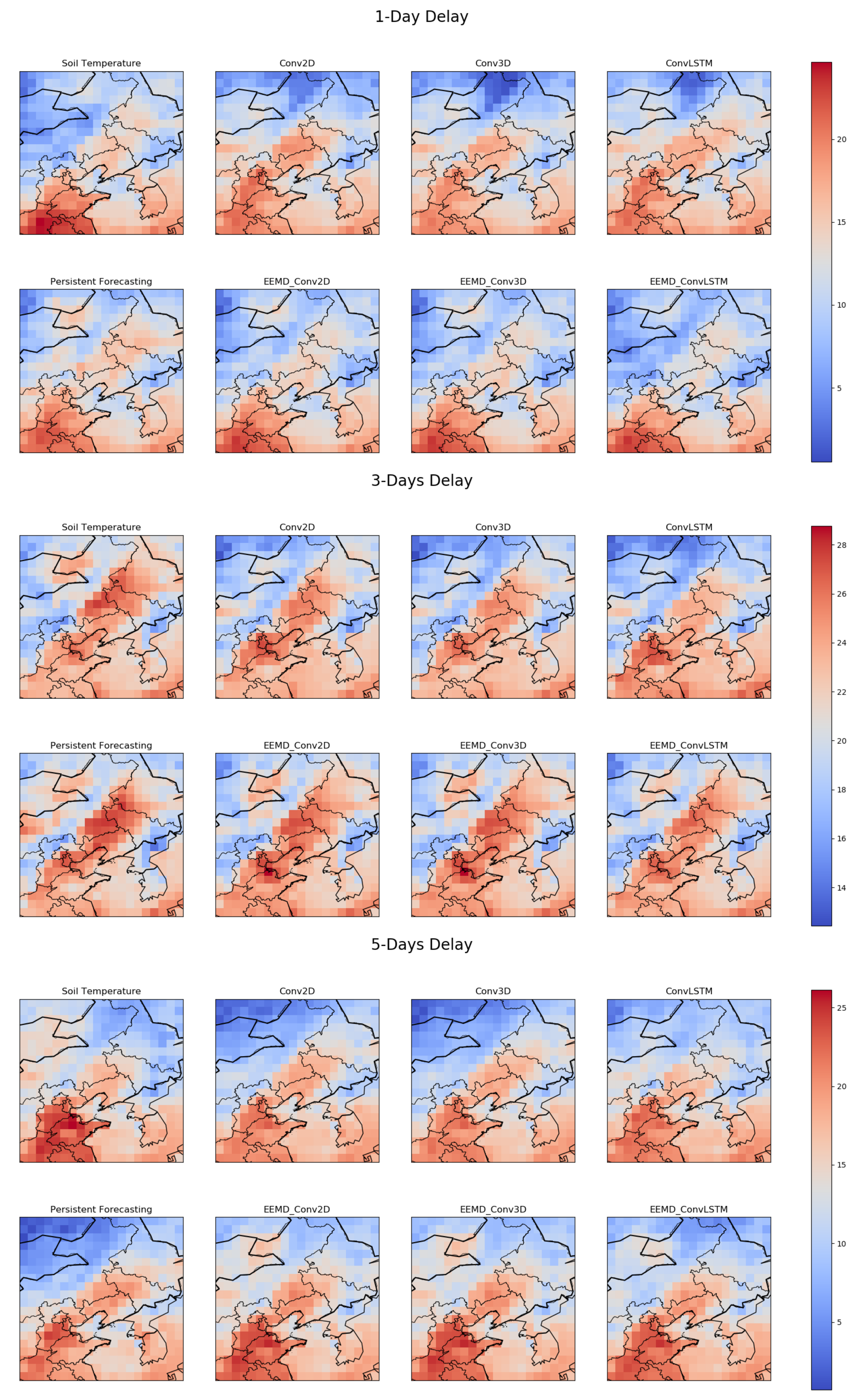
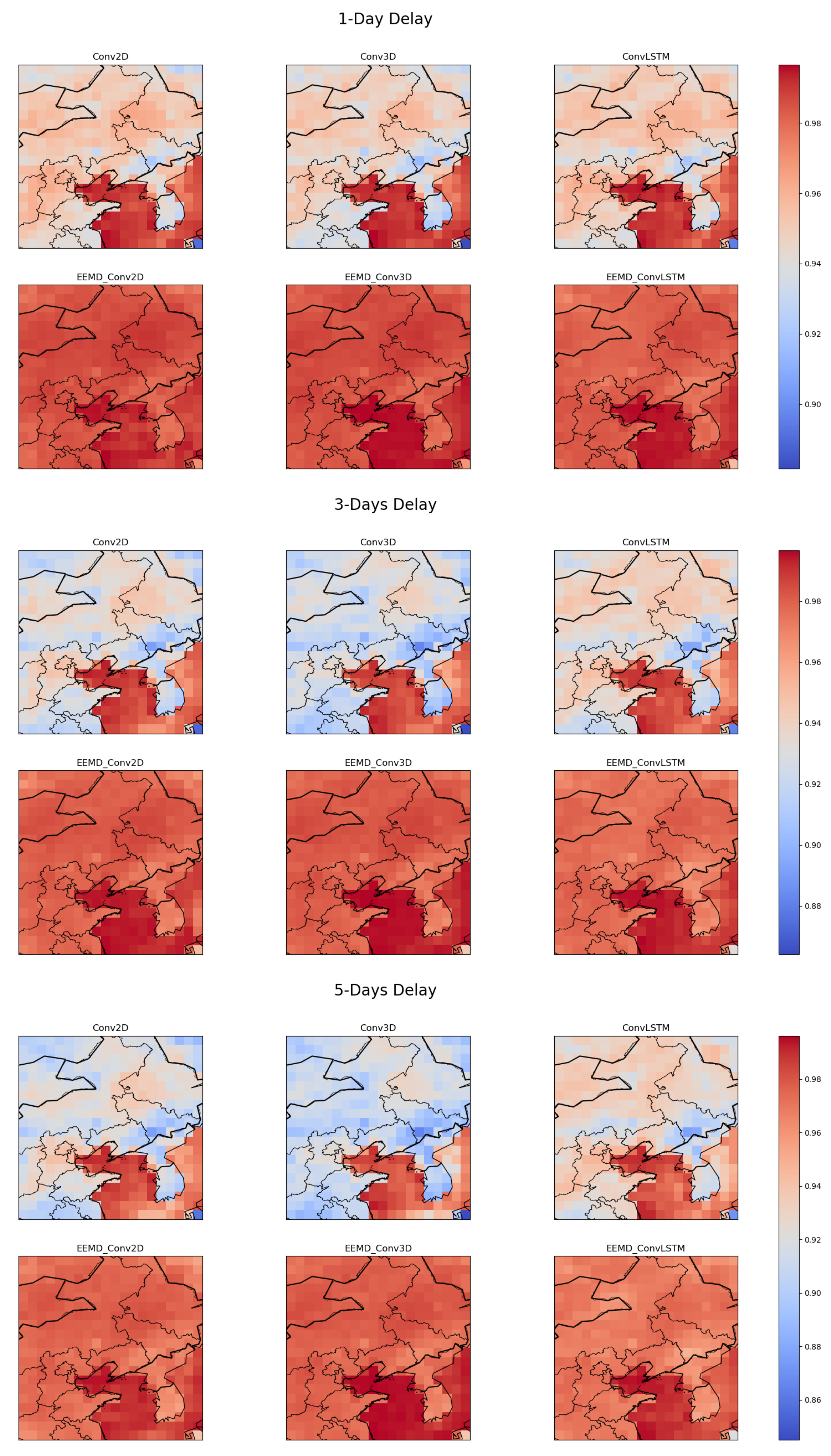
3.1. Results
3.2. Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lai, L.; Zhao, X.; Jiang, L.; Wang, Y.; Luo, L.; Zheng, Y.; Chen, X.; Rimmington, G.M. Soil respiration in different agricultural and natural ecosystems in an arid region. PLoS ONE 2012, 7, e48011. [Google Scholar] [CrossRef]
- Liang, L.; Riveros-Iregui, D.; Emanuel, R.; McGlynn, B. A simple framework to estimate distributed soil temperature from discrete air temperature measurements in data-scarce regions. J. Geophys. Res. Atmos. 2014, 119, 407–417. [Google Scholar] [CrossRef]
- Onwuka, B.; Mang, B. Effects of soil temperature on some soil properties and plant growth. Adv. Plants Agric. Res 2018, 8, 34–37. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, W.; Smith, S.L.; Riseborough, D.W.; Cihlar, J. Soil temperature in Canada during the twentieth century: Complex responses to atmospheric climate change. J. Geophys. Res. D Atmos. 2005, 110, 1–15. [Google Scholar] [CrossRef]
- Harvey, A.C.; Todd, P. Forecasting economic time series with structural and Box-Jenkins models: A case study. J. Bus. Econ. Stat. 1983, 1, 299–307. [Google Scholar] [CrossRef]
- Specht, D.F. A general regression neural network. IEEE Trans. Neural Netw. 1991, 2, 568–576. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Dorffner, G. Neural networks for time series processing. Neural Netw. World 1996, 6, 447–468. [Google Scholar]
- Granger, C.; Andersen, A. Non-linear time series modelling. In Applied Time Series Analysis I; Findley, D.F., Ed.; Academic Press: Cambridge, MA, USA, 1978; pp. 25–38. [Google Scholar] [CrossRef]
- Shirvani, A.; Moradi, F.; Moosavi, A.A. Time series modelling of increased soil temperature anomalies during long period. Int. Agrophysics 2015, 29, 509–515. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.F.; Wang, W.M.; Huang, C.M. Analysis of an adaptive time-series autoregressive moving-average (ARMA) model for short-term load forecasting. Electr. Power Syst. Res. 1995, 34, 187–196. [Google Scholar] [CrossRef]
- Mihalakakou, G. On estimating soil surface temperature profiles. Energy Build. 2002, 34, 251–259. [Google Scholar] [CrossRef]
- Lekkas, D.; Onof, C.; Lee, M.; Baltas, E. Application of artificial neural networks for flood forecasting. Glob. Nest 2004, 6, 205–211. [Google Scholar] [CrossRef]
- Abdel-Aal, R.E. Hourly temperature forecasting using abductive networks. Eng. Appl. Artif. Intell. 2004, 17, 543–556. [Google Scholar] [CrossRef]
- Bilgili, M. Prediction of soil temperature using regression and artificial neural network models. Meteorol. Atmos. Phys. 2010, 110, 59–70. [Google Scholar] [CrossRef]
- Tabari, H.; Hosseinzadeh Talaee, P.; Willems, P. Short-term forecasting of soil temperature using artificial neural network. Meteorol. Appl. 2015, 22, 576–585. [Google Scholar] [CrossRef] [Green Version]
- Salcedo-Sanz, S.; Deo, R.; Carro-Calvo, L.; Saavedra-Moreno, B. Monthly prediction of air temperature in Australia and New Zealand with machine learning algorithms. Theor. Appl. Climatol. 2016, 125, 13–25. [Google Scholar] [CrossRef]
- Kisi, O.; Sanikhani, H.; Cobaner, M. Soil temperature modeling at different depths using neuro-fuzzy, neural network, and genetic programming techniques. Theor. Appl. Climatol. 2017, 129, 833–848. [Google Scholar] [CrossRef]
- Delbari, M.; Sharifazari, S.; Mohammadi, E. Modeling daily soil temperature over diverse climate conditions in Iran—A comparison of multiple linear regression and support vector regression techniques. Theor. Appl. Climatol. 2019, 135, 991–1001. [Google Scholar] [CrossRef]
- Tokgöz, A.; Ünal, G. A RNN based time series approach for forecasting turkish electricity load. In Proceedings of the 2018 26th Signal Processing and Communications Applications Conference (SIU), Izmir, Turkey, 2–5 May 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Hewage, P.; Behera, A.; Trovati, M.; Pereira, E. Long-Short Term Memory for an Effective Short-Term Weather Forecasting Model Using Surface Weather Data. In IFIP Advances in Information and Communication Technology; Springer: Berlin/Heidelberg, Germany, 2019; Volume 559, pp. 382–390. [Google Scholar] [CrossRef] [Green Version]
- Lawrence, S.; Giles, C.L.; Tsoi, A.C.; Back, A.D. Face recognition: A convolutional neural-network approach. IEEE Trans. Neural Netw. 1997, 8, 98–113. [Google Scholar] [CrossRef] [Green Version]
- Ji, S.; Xu, W.; Yang, M.; Yu, K. 3D convolutional neural networks for human action recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 35, 221–231. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tran, D.; Bourdev, L.; Fergus, R.; Torresani, L.; Paluri, M. Learning spatiotemporal features with 3D convolutional networks. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; Volume 2015, pp. 4489–4497. [Google Scholar] [CrossRef] [Green Version]
- Shi, X.; Chen, Z.; Wang, H.; Yeung, D.Y.; Wong, W.K.; Woo, W.C. Convolutional LSTM network: A machine learning approach for precipitation nowcasting. Adv. Neural Inf. Process. Syst. 2015, 2015, 802–810. [Google Scholar]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Wang, W.c.; Chau, K.w.; Xu, D.m.; Chen, X.Y. Improving forecasting accuracy of annual runoff time series using ARIMA based on EEMD decomposition. Water Resour. Manag. 2015, 29, 2655–2675. [Google Scholar] [CrossRef]
- Zhang, N.; Lin, A.; Shang, P. Multidimensional k-nearest neighbor model based on EEMD for financial time series forecasting. Phys. A Stat. Mech. Its Appl. 2017, 477, 161–173. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, Q.; Zhang, G.; Nie, Z.; Gui, Z.; Que, H. A novel hybrid data-driven model for daily land surface temperature forecasting using long short-term memory neural network based on ensemble empirical mode decomposition. Int. J. Environ. Res. Public Health 2018, 15, 1032. [Google Scholar] [CrossRef] [Green Version]
- Huang, N.E.; Shen, Z.; Long, S.R. A new view of nonlinear water waves: The Hilbert spectrum. Annu. Rev. Fluid Mech. 1999, 31, 417–457. [Google Scholar] [CrossRef] [Green Version]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Kalchbrenner, N.; Grefenstette, E.; Blunsom, P. A convolutional neural network for modelling sentences. In Proceedings of the 52nd Annual Meeting of the Association for Computational Linguistics, Baltimore, MD, USA, 22–27 June 2014; Volume 1, pp. 655–665. [Google Scholar] [CrossRef] [Green Version]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Xu, L.; Ren, J.S.; Liu, C.; Jia, J. Deep convolutional neural network for image deconvolution. Adv. Neural Inf. Process. Syst. 2014, 2, 1790–1798. [Google Scholar]
- Tran, D.; Wang, H.; Torresani, L.; Ray, J.; Lecun, Y.; Paluri, M. A Closer Look at Spatiotemporal Convolutions for Action Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 June 2018; pp. 6450–6459. [Google Scholar]
- Zaremba, W.; Sutskever, I.; Vinyals, O. Recurrent Neural Network Regularization. arXiv 2014, arXiv:1409.2329. [Google Scholar]
- Rasp, S.; Dueben, P.D.; Scher, S.; Weyn, J.A.; Mouatadid, S.; Thuerey, N. WeatherBench: A Benchmark Data Set for Data-Driven Weather Forecasting. J. Adv. Model. Earth Syst. 2020, 12, e2020MS002203. [Google Scholar] [CrossRef]
- Tenge, A.J.; Kaihura, F.B.; Lal, R.; Singh, B.R. Diurnal soil temperature fluctuations for different erosion classes of an oxisol at Mlingano, Tanzania. Soil Tillage Res. 1998, 49, 211–217. [Google Scholar] [CrossRef]
- Paul, K.I.; Polglase, P.J.; Smethurst, P.J.; O’Connell, A.M.; Carlyle, C.J.; Khanna, P.K. Soil temperature under forests: A simple model for predicting soil temperature under a range of forest types. Agric. For. Meteorol. 2004, 121, 167–182. [Google Scholar] [CrossRef]
- Shomron, G.; Weiser, U. Spatial correlation and value prediction in convolutional neural networks. IEEE Comput. Archit. Lett. 2019, 18, 10–13. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.X.; Wu, Q.B.; Zhu, J.Q. Improved EEMD-based crude oil price forecasting using LSTM networks. Phys. A: Stat. Mech. Its Appl. 2019, 516, 114–124. [Google Scholar] [CrossRef]
- Tan, Q.F.; Lei, X.H.; Wang, X.; Wang, H.; Wen, X.; Ji, Y.; Kang, A.Q. An adaptive middle and long-term runoff forecast model using EEMD-ANN hybrid approach. J. Hydrol. 2018, 567, 767–780. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data | Minimum | Maximum | Mean | Median | Standard Deviation |
|---|---|---|---|---|---|
| Northwest Area (43° N–52° N, 112° E–121° E) | −37.071 | 30.835 | 0.764 | 0.709 | 13.616 |
| Northeast Area (43° N–52° N, 122° E–131° E) | −35.452 | 29.477 | 2.967 | 2.477 | 12.952 |
| Southwest Area (33° N–42° N, 112° E–121° E) | −28.354 | 33.745 | 11.017 | 11.944 | 10.918 |
| Southeast Area (33° N–42° N, 122° E–131° E) | −27.582 | 32.727 | 13.325 | 14.582 | 9.462 |
| Overall (33° N–52° N, 112° E–131° E) | −37.071 | 33.745 | 7.018 | 9.056 | 12.973 |
| Models | Input Size | Kernel Size | Strides |
|---|---|---|---|
| Conv2D | (20,20,10) | 3 × 3 | (1,1) |
| Conv3D | (10,20,20,1) | (5,2,2,3) × 3 × 3 | [(1,2,2,3),1,1] |
| ConvLSTM | (10,20,20,1) | 3 × 3 | (1,1) |
| EEMD-Conv2D | (20,20,100) | 3 × 3 | (1,1) |
| EEMD-Conv3D | (10,20,20,10) | (5,2,2,3) × 3 × 3 | [(1,2,2,3),1,1] |
| EEMD-ConvLSTM | (10,20,20,10) | 3 × 3 | (1,1) |
| Delay | Models | MAE | MSE | RMSE | MAPE | |
|---|---|---|---|---|---|---|
| 1 Day | PF | 1.4749 | 4.6189 | 2.1492 | 0.9713 | 29.87% |
| Conv2D | 1.7371 | 5.9179 | 2.4327 | 0.9626 | 40.65% | |
| Conv3D | 1.7899 | 6.3363 | 2.5172 | 0.9598 | 42.36% | |
| ConvLSTM | 1.7301 | 5.8763 | 2.4241 | 0.9634 | 40.33% | |
| EEMD-Conv2D | 0.9952 | 1.775 | 1.3323 | 0.9887 | 16.22% | |
| EEMD-Conv3D | 0.9656 | 1.7151 | 1.3096 | 0.9893 | 17.90% | |
| EEMD-ConvLSTM | 1.0625 | 2.1374 | 1.462 | 0.9868 | 21.54% | |
| 3 Days | PF | 2.2058 | 9.7061 | 3.1155 | 0.9392 | 53.00% |
| Conv2D | 2.0167 | 7.9812 | 2.8251 | 0.9489 | 44.86% | |
| Conv3D | 2.1032 | 8.6639 | 2.9434 | 0.9442 | 46.91% | |
| ConvLSTM | 1.9651 | 7.359 | 2.7128 | 0.9516 | 46.30% | |
| EEMD-Conv2D | 1.1403 | 2.3792 | 1.5424 | 0.985 | 19.33% | |
| EEMD-Conv3D | 1.0942 | 2.2378 | 1.4959 | 0.9858 | 19.31% | |
| EEMD-ConvLSTM | 1.2281 | 2.8185 | 1.6789 | 0.9819 | 19.72% | |
| 5 Days | PF | 2.4653 | 11.8385 | 3.4407 | 0.9252 | 59.90% |
| Conv2D | 2.1978 | 9.3635 | 3.06 | 0.9387 | 54.72% | |
| Conv3D | 2.3094 | 10.2386 | 3.1998 | 0.9327 | 54.94% | |
| ConvLSTM | 2.0861 | 8.2726 | 2.8762 | 0.949 | 65.03% | |
| EEMD-Conv2D | 1.2865 | 3.002 | 1.7326 | 0.9807 | 27.41% | |
| EEMD-Conv3D | 1.2056 | 2.7216 | 1.6497 | 0.9826 | 25.90% | |
| EEMD-ConvLSTM | 1.3976 | 3.6842 | 1.9194 | 0.9768 | 21.39% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, F.; Hao, H.; Li, Q. An Ensemble 3D Convolutional Neural Network for Spatiotemporal Soil Temperature Forecasting. Sustainability 2021, 13, 9174. https://doi.org/10.3390/su13169174
Yu F, Hao H, Li Q. An Ensemble 3D Convolutional Neural Network for Spatiotemporal Soil Temperature Forecasting. Sustainability. 2021; 13(16):9174. https://doi.org/10.3390/su13169174
Chicago/Turabian StyleYu, Fanhua, Huibowen Hao, and Qingliang Li. 2021. "An Ensemble 3D Convolutional Neural Network for Spatiotemporal Soil Temperature Forecasting" Sustainability 13, no. 16: 9174. https://doi.org/10.3390/su13169174
APA StyleYu, F., Hao, H., & Li, Q. (2021). An Ensemble 3D Convolutional Neural Network for Spatiotemporal Soil Temperature Forecasting. Sustainability, 13(16), 9174. https://doi.org/10.3390/su13169174