
Sustainability of Project-Based Learning by Incorporating Transdisciplinary Design in Fabrication of Hydraulic Robot Arm


Abstract
:1. Introduction
2. Literature Review
- Hypothesis testing for the analysis of the student feedback questionnaire [29] in gauging the effectiveness of robotics-inspired transdisciplinary PjBL in achieving the corresponding robotics-inspired transdisciplinary education learning outcomes mapped by the student feedback questionnaire.
- Hypothesis testing for the comparison analysis of the student scores in the complex engineering problem-based project as well as the student scores in solving associated numerical problems in assignments to evaluate the effectiveness of PjBL and PbBL approaches that the project and the numerical problems represent, respectively.
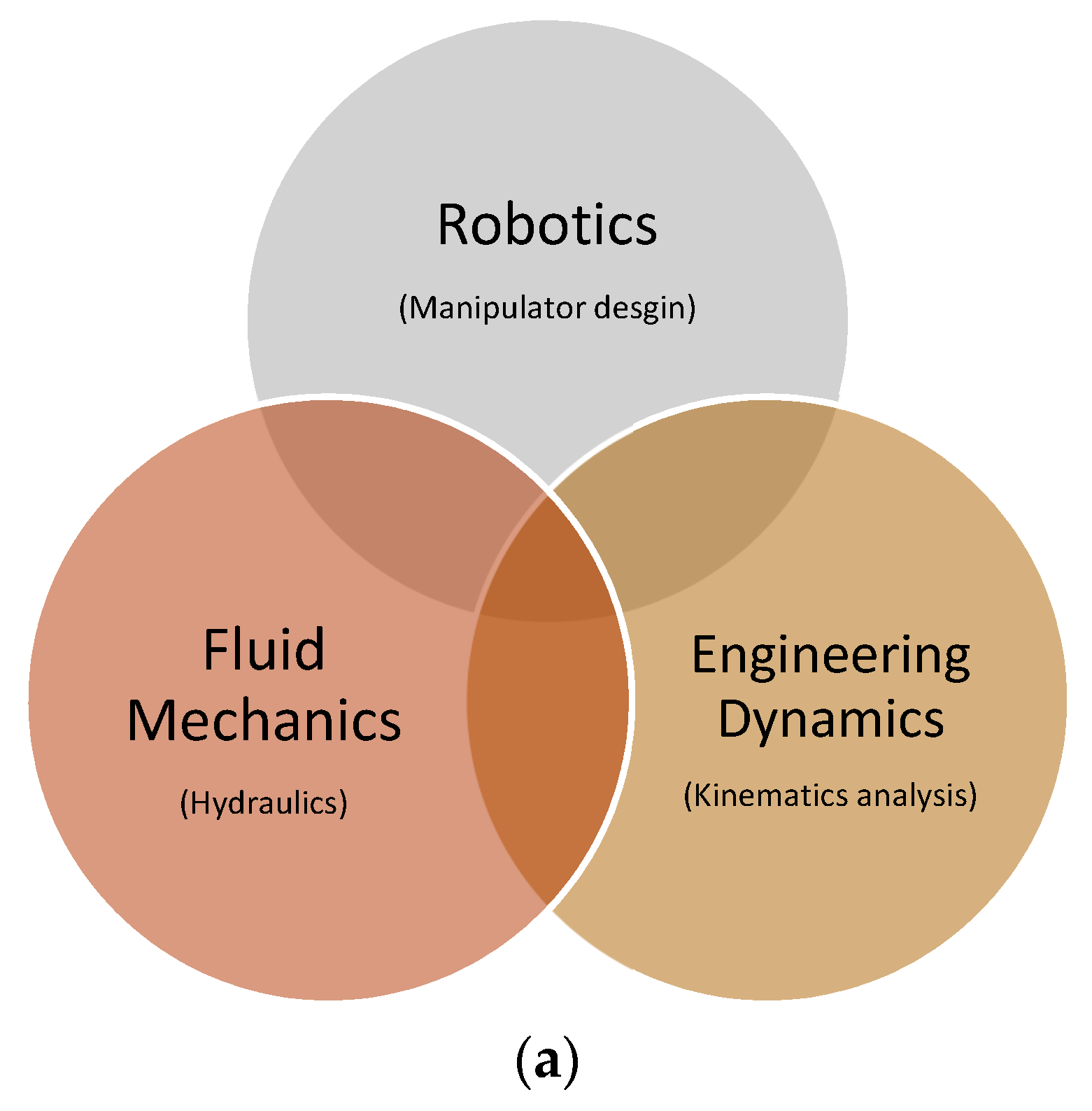
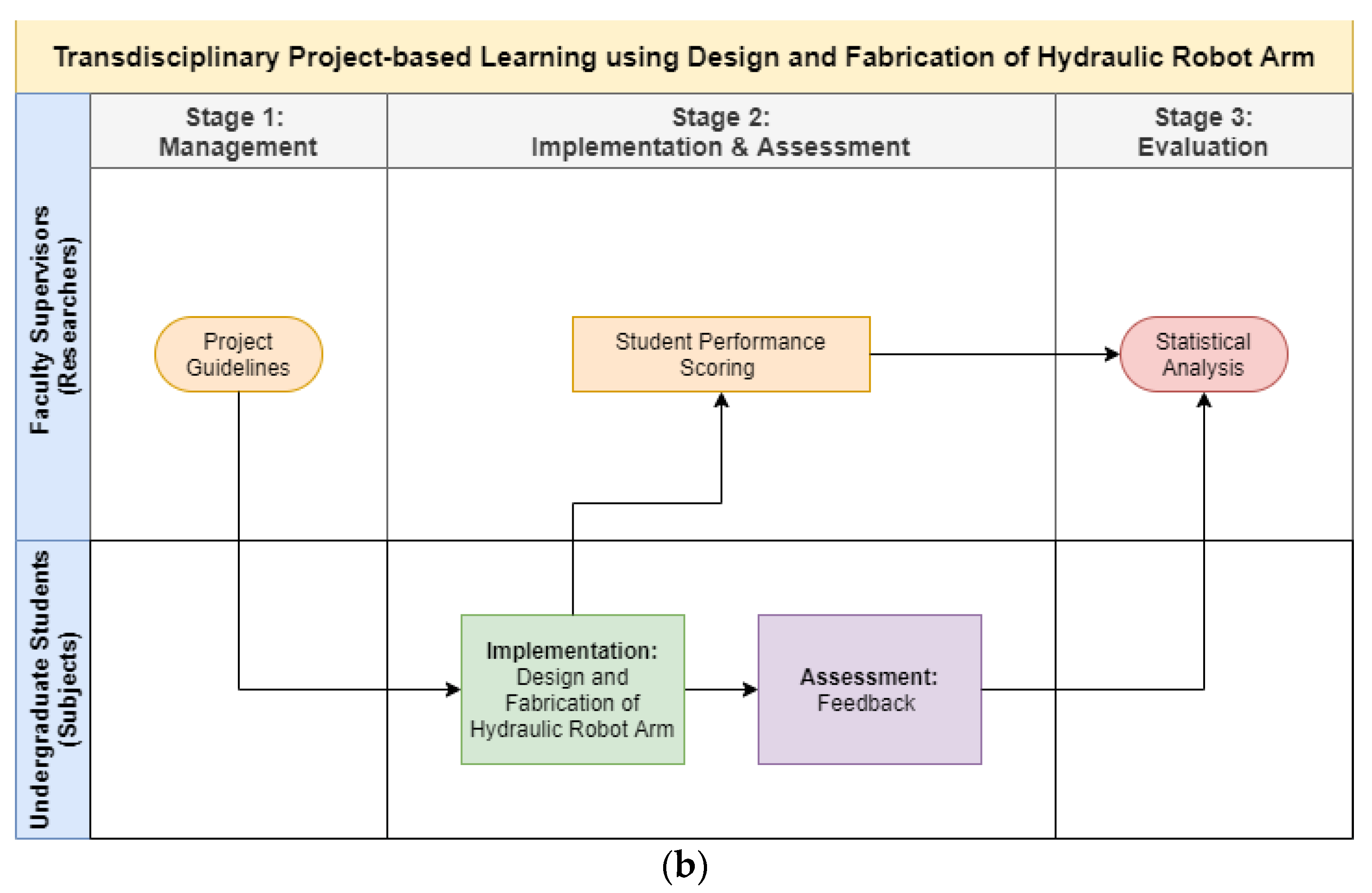
3. Research Methodology
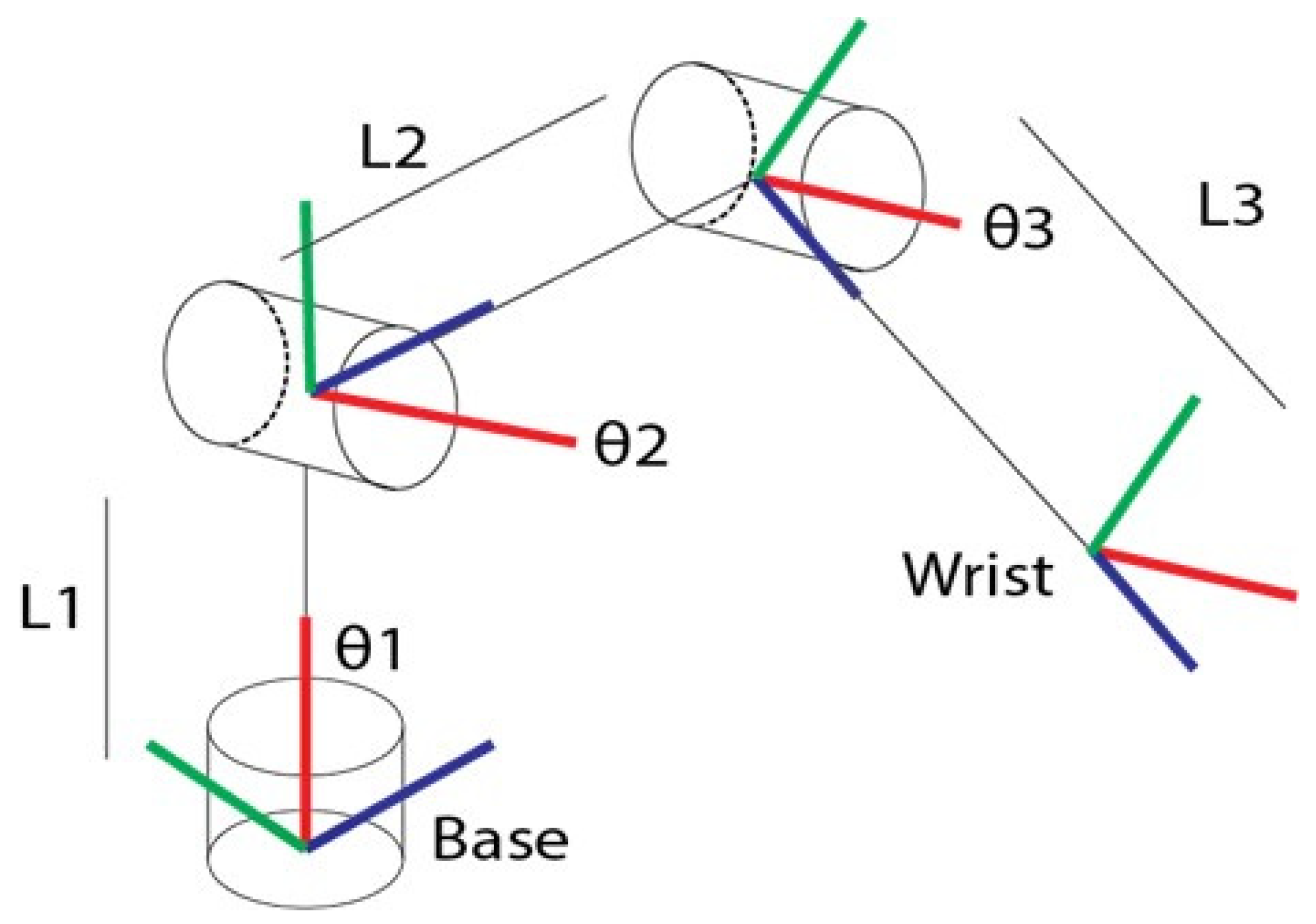
3.1. Management: Complex Engineering Problem
- What is the (derived) mathematical relationship between the joint angles and the corresponding position of the wrist with regard to the base frame?
- What are the joint angle values that produce the maximum extension in the manipulator? What is the length of the hydraulic column corresponding to that maximum extension?
- What are the maximum joint angle limitations of your fabricated manipulator? What is the length of the hydraulic column corresponding to that maximum extension?
- Be able to calculate how far the wrist moves from the base to reach a goal point.
3.2. Implementation: Project Development by the Students
- Presentation and demonstration (45% of total score): To assess the students’ practical knowledge along with the teamwork and presentation skills pertaining to the project design and development.
- Assignment/project Submission (5% of total score): To gauge the student vigilance and timely preparedness in meeting project deadlines.
- Report (50% of total score): To evaluate the academic/professional communication skills for technical report writing.
3.3. Assessment: Student Grades and Feedback Questionnaire
3.4. Evaluation: Statistical Analysis
4. Results and Discussion
4.1. Statistical Analysis of the Student Feedback Questionnaire
4.2. Statistical Analysis of Project-Based Learning Compared to Problem-Based Learning
4.3. Statistical Analysis of the Impact of Student Residential Status on Project-Based Learning and Problem-Based Learning
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bell, S. Project-Based Learning for the 21st Century: Skills for the Future. Clear. House J. Educ. Strateg. Issues Ideas 2010, 83, 39–43. [Google Scholar] [CrossRef]
- Mills, J.E.; Treagust, D.F. Engineering education—Is problem-based or project-based learning the answer. Australas. J. Eng. Educ. 2003, 3, 2–16. [Google Scholar]
- English, R. New accreditation criteria for US engineering technology programs. In Proceedings of the International Conference on Engineering Education, Oslo, Norway, 6–10 August 2001. [Google Scholar]
- William, K.; Laura, G. Teaching enterprise in vocational disciplines: Reflecting on positive experience. Manag. Decis. 2004, 42, 531–541. [Google Scholar]
- Sumarni, W.; Wardani, S.; Sudarmin, S.; Gupitasari, D.N. Project Based Learning (PBL) to improve psychomotoric skills: A classroom action research. J. Pendidik. IPA Indones. 2016, 5, 157–163. [Google Scholar]
- Wijayati, N.; Sumarni, W.; Supanti, S. Improving Student Creative Thinking Skills Through Project Based Learning. KnE Soc. Sci. 2019, 3, 408–421. [Google Scholar] [CrossRef]
- Savery, J.R. Overview of problem-based learning: Definitions and distinctions. In Essential Readings in Problem-Based Learning: Exploring and Extending the Legacy of Howard S. Barrows; Purdue University Press: West Lafayette, IN, USA, 2015; Volume 9, pp. 5–15. [Google Scholar]
- Ambrose, S.A.; Amon, C.H. Systematic Design of a First-Year Mechanical Engineering Course at Carnegie Mellon University. J. Eng. Educ. 1997, 86, 173–181. [Google Scholar] [CrossRef]
- Frank, M.; Lavy, I.; Elata, D. Implementing the Project-Based Learning Approach in an Academic Engineering Course. Int. J. Technol. Design Educ. 2003, 13, 273–288. [Google Scholar] [CrossRef]
- San-Segundo, R.; Montero, J.M.; Macías-Guarasa, J.; Ferreiros, J.; Córdoba, R. Towards the acquisition of soft and systemic skills: A project based learning experience in massive laboratories on electronics. In Proceedings of the International Conference on Engineering and Computer Education, Madrid, Spain, 13–16 November 2005. [Google Scholar]
- Ertas, A.; Maxwell, T.; Rainey, V.P.; Tanik, M.M. Transformation of higher education: The transdisciplinary approach in engineering. IEEE Trans. Educ. 2003, 46, 289–295. [Google Scholar] [CrossRef]
- Lutters, E.; van Houten, F.J.; Bernard, A.; Mermoz, E.; Schutte, C.S. Tools and techniques for product design. CIRP Ann. 2014, 63, 607–630. [Google Scholar] [CrossRef]
- Sharunova, A.; Butt, M.; Kresta, S.; Carey, J.; Wyard-Scott, L.; Adeeb, S.; Blessing, L.; Qureshi, A.J. Cognition and transdisci- plinary design: An educational framework for undergraduate engineering design curriculum development. In Proceedings of the Canadian Engineering Education Association (CEEA), Toronto, ON, Canada, 4–7 June 2017. [Google Scholar]
- Sharunova, M.A.; Butt, M.M.; Carey, J.P.; Qureshi, A.J. Alumni Feedback and Reflections on Industrial Demands and Transdisciplinary Engineering Design Education. In Proceedings of the 2019 ASEE Annual Conference & Exposition, Tampa, FL, USA, 15–19 June 2019. [Google Scholar]
- Sharunova, A.; Butt, M.; Qureshi, A.J. Transdisciplinary Design Education for Engineering Undergraduates: Mapping of Bloom’s Taxonomy Cognitive Domain across Design Stages. Procedia CIRP 2018, 70, 313–318. [Google Scholar] [CrossRef]
- Sharunova, A.; Wang, Y.; Kowalski, M.; Qureshi, A.J. Applying Bloom’s taxonomy in transdisciplinary engineering design education. Int. J. Technol. Design Educ. 2020, 1–13. [Google Scholar] [CrossRef]
- Qureshi, A.J.; Gericke, K.; Blessing, L. Design process commonalities in trans-disciplinary design. In Proceedings of the 19th International Conference on Engineering Design ICED13, Seoul, Korea, 19–22 August 2013. [Google Scholar]
- Ertas, A.; Frias, K.M.; Tate, D.; Back, S.M. Shifting engineering education from disciplinary to transdisciplinary practice. Int. J. Eng. Educ. 2015, 31, 94–105. [Google Scholar]
- Ertas, A. Transdisciplinary Engineering Design Process; John Wiley & Sons: Hoboken, NJ, USA, 2018. [Google Scholar]
- Eguchi, A. Robotics as a learning tool for educational transformation. In Proceedings of the 4th International Workshop Teaching Robotics, Teaching with Robotics & 5th International Conference Robotics in Education, Padova, Italy, 18 July 2014. [Google Scholar]
- Alimisis, D. Educational robotics: Open questions and new challenges. Sci. Technol. Educ. 2013, 6, 63–71. [Google Scholar]
- Yew, E.H.J.; Goh, K. Problem-Based Learning: An Overview of Its Process and Impact on Learning. Health Prof. Educ. 2016, 2, 75–79. [Google Scholar] [CrossRef] [Green Version]
- Shepherd, H.G. The Probe Method: A Project-Based-Learning Model’s Effect on Critical Thinking Skills. Diss. Abstr. Int. Sect. A 1998, 59, 779. [Google Scholar]
- Kolmos, A.; Fink, F.K.; Krogh, L. The Aalborg PBL Model: Progress, Diversity and Challenges; Aalborg University Press: Aalborg, Denmark, 2004. [Google Scholar]
- Rekola, J.; Messo, T. Application of problem-based learning method for a course on modeling and control of electric drives. In Proceedings of the IECON 2017—43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 9 October–1 November 2017; pp. 3583–3588. [Google Scholar]
- Jabarullah, N.H.; Hussain, H.I. The effectiveness of problem-based learning in technical and vocational education in Malaysia. Educ. Train. 2019, 61, 552–567. [Google Scholar] [CrossRef]
- Hill, A.M.; Hopkins, R. University/School Collaboration in Teacher Education. Changing Schools, Changing Practices: Perspectives on Educational Reform and Teacher Professionalism; Garant: Louvan, Belgium, 1999; pp. 171–182. [Google Scholar]
- Ibrahim, I.; Khalid, M.W.B.; Shoukat, G.; Sajid, M. An Integrated Approach for the Teaching of Pipe Network Analysis Using Project Based Learning. In Proceedings of the ASME 2018 5th Joint US-European Fluids Engineering Division Summer Meeting, Montreal, QC, Canada, 15–20 July 2018; Volume FEDSM2018-83382, p. V001T04A003. [Google Scholar]
- Ali, S.; Sajid, M.; Ayaz, Y.; Asgher, U. A Methodology for Integrating Project Based Learning Outcomes and Attributes via Questionnaire. In Advances in Neuroergonomics and Cognitive Engineering; Advances in Intelligent Systems and Computing; Ayaz, H., Asgher, U., Eds.; Springer: Cham, Switzerland, 2021; Volume 1201. [Google Scholar]
- Cheville, R.A.; McGovern, A.; Bull, K.S. The light applications in science and engineering research collaborative undergraduate laboratory for teaching (LASER CULT)-relevant experiential learning in photonics. IEEE Trans. Educ. 2005, 48, 254–263. [Google Scholar] [CrossRef]
- Somerville, M.; Anderson, D.; Berbeco, H.; Bourne, J.R.; Crisman, J.; Dabby, D.; Donis-Keller, H.; Holt, S.S.; Kerns, S.; Kerns, D.V.; et al. The Olin curriculum: Thinking toward the future. IEEE Trans. Educ. 2005, 48, 198–205. [Google Scholar] [CrossRef]
- Martinez-Mones, A.; Gomez-Sanchez, E.; Dimitriadis, Y.A.; Jorrin-Abellan, I.M.; Rubia-Avi, B.; Vega-Gorgojo, G. Multiple case studies to enhance project-based learning in a computer architecture course. IEEE Trans. Educ. 2005, 48, 482–489. [Google Scholar] [CrossRef]
- Dempsey, G.L.; Anakwa, W.K.N.; Huggins, B.D.; Irwin, J.H. Electrical and computer engineering curriculum assessment via senior miniproject. IEEE Trans. Educ. 2003, 46, 350–358. [Google Scholar] [CrossRef]
- Macias-Guarasa, J.; Montero, J.M.; San-Segundo, R.; Araujo, A.; Nieto-Taladriz, O. A project-based learning approach to design electronic systems curricula. IEEE Trans. Educ. 2006, 49, 389–397. [Google Scholar] [CrossRef]
- Schahczenski, C.; Ackerman, F. A Successful Multi-Course Project. J. Comput. Sci. Coll. 2017, 33, 202–208. [Google Scholar]
- Baochun, X.; Yunlong, S.; Jingqiu, W.; Wei, C. Design and Implementation of Teaching for the Training Project of Multi-Course. China Mod. Educ. Equip 2017, 7. [Google Scholar] [CrossRef]
- Sullivan, G.A.; Hardin, J.M. The Can Crusher Project: A Multi-Semester Design Project to Enhance Retention of Engineering Skill Sets. In Proceedings of the ASME 2015 Internatonal Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Boston, MA, USA, 2–5 August 2015. [Google Scholar]
- Khandakar, A.; Chowdhury, M.E.H.; Gonzales, A., Jr.; Pedro, S.; Touati, F.; Emadi, N.A.; Ayari, M.A. Case study to analyze the impact of multi-course project-based learning approach on education for sustainable development. Sustainability 2020, 12, 480. [Google Scholar] [CrossRef] [Green Version]
- Pota, H.R. A prototype flexible robot arm-an interdisciplinary undergraduate project. IEEE Trans. Educ. 1992, 35, 83–89. [Google Scholar] [CrossRef]
- Nervold, A.K.; Straub, J.; Berk, J. A Curriculum-Integrated Small Spacecraft Program for Interdisciplinary Education. In Proceedings of the AIAA SPACE 2013 Conference and Exposition, San Diego, CA, USA, 10–12 September 2013. [Google Scholar]
- Hyunjung, R.; Jinyoung, H.; Minha, L.; Young-Wan, C. Effects of interdisciplinary courses on future engineers’ competency. High. Educ. Skills Work-Based Learn. 2020, 10, 467–479. [Google Scholar]
- Xuemei, L.; Gang, X. Interdisciplinary Innovative Education Based on Modular Robot Platform. In CCCM ’08: Proceedings of the ISECS International Colloquium on Computing, Communication, Control, and Management; IEEE Computer Society: Washington, DC, USA, 2008; Volume 2, pp. 66–69. [Google Scholar]
- Luna, A.; Chong, M. A PBL approach for teaching Electronics Fundamentals by Developing Robotics Projects. In Proceedings of the 2020 XIV Technologies Applied to Electronics Teaching Conference (TAEE), Porto, Portugal, 8–10 July 2020; pp. 1–7. [Google Scholar]
- Andrew, M.; Marler, T.; Lastunen, J.; Acheson-Field, H.; Popper, S.W. An Analysis of Education and Training Programs in Advanced Manufacturing Using Robotics; RAND Corporation: Santa Monica, CA, USA, 2020. [Google Scholar]
- Likert, R. A Technique for the Measurement of Attitudes. Arch. Psychol. 1932, 22, 55. [Google Scholar]
- Lancaster, H.O.; Seneta, E. Chi-square distribution. Encycl. Biostat 2005, 2. [Google Scholar] [CrossRef]
- Rao, J.N.K.; Scott, A.J. On Simple Adjustments to Chi-Square Tests with Sample Survey Data. Ann. Stat. 1987, 15, 385–397. [Google Scholar] [CrossRef]
- Shapiro, S.S.; Wilk, M.B. An Analysis of Variance Test for Normality (Complete Samples). Biometrika 1965, 52, 591–611. [Google Scholar] [CrossRef]
- Razali, N.M.; Wah, Y.B. Power comparisons of shapiro-wilk, kolmogorov-smirnov, lilliefors and anderson-darling tests. J. Stat. Model. Anal. 2011, 2, 21–33. [Google Scholar]
- Mann, H.B.; Whitney, D.R. On a Test of Whether one of Two Random Variables is Stochastically Larger than the Other. Ann. Math. Stat. 1947, 18, 50–60. [Google Scholar] [CrossRef]
- MacFarland, T.W.; Yates, J.M. Mann-Whitney U Test; Springer International Publishing: Cham, Switzerland, 2016; pp. 103–132. [Google Scholar]
- Fay, M.P.; Proschan, M.A. Wilcoxon-Mann-Whitney or t-test? On assumptions for hypothesis tests and multiple interpretations of decision rules. Stat. Surv. 2010, 4, 1–39. [Google Scholar] [CrossRef] [PubMed]
- McKnight, P.E.; Najab, J. Mann-Whitney U Test. In The Corsini Encyclopedia of Psychology; Weiner, I.B., Craighead, W.E., Eds.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2010. [Google Scholar]
- López-Nicolás, G.; Romeo, A.; Guerrero, J. Project Based Learning of Robot Control and Programming. In Proceedings of the ICEE and ICEER (International Conference on Engineering Education and Research), Seoul, Korea, 23–28 August 2009; pp. 1–8. [Google Scholar]
- Ghaleb, N.; Almalki, H.; Aly, A. Project-Based Learning of Robotics for Engineering Educationimprovement. Int. J. Mech. Prod. Eng. Res. Dev. 2020, 10, 4395–4424. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Question Statements | |
|---|---|
| 1 | The project provided me with motivation to learn about hydraulics and robotics. |
| 2 | The project provided me with opportunities for independent learning and knowledge construction. |
| 3 | The project allowed me to explore and make decisions in order to reach a solution. |
| 4 | Inclusion of the project increased my interest in the course as a whole. |
| 5 | The project helped me explore meaningful questions related to hydraulics and kinematics. |
| 6 | The project encouraged me to do independent, out-of-the-box research utilizing all resources (Internet, library, seniors, faculty, et cetera) available to me. |
| 7 | The project has helped me in becoming a better engineer. |
| 8 | I am confident in solving kinematic problems. |
| 9 | The project provided me with sufficient skills to design a simple hydraulic arm in the future. |
| 10 | Knowledge acquired through the project will help me if/when I am to work in an industry. |
| 11 | The project helped me with horizontal knowledge development (i.e., skills not strictly a part of the course, including soft skills). |
| 12 | The project helped me with team working skills. |
| 13 | The project helped me with time management. |
| 14 | The project gave me insights into handling projects professionally. |
| 15 | The project made me an active learner. |
| 16 | I prefer project-based learning over lecture-based learning. |
| 17 | Working on a project improved my grade for this course. |
| 18 | My understanding of hydrostatics is better than my understanding of the other topics of fluid mechanics. |
| 19 | Had the project not been a part of the course, I would not have learned as much. |
| Variable | χ2 Value | p-Value |
|---|---|---|
| Outcome A | 130.83 | 2.59 × 10−27 |
| Outcome B | 150.73 | 1.42 × 10−31 |
| Outcome C | 105.19 | 7.72 × 10−22 |
| Outcome D | 129.74 | 4.42 × 10−27 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Farid, T.; Ali, S.; Sajid, M.; Akhtar, K. Sustainability of Project-Based Learning by Incorporating Transdisciplinary Design in Fabrication of Hydraulic Robot Arm. Sustainability 2021, 13, 7949. https://doi.org/10.3390/su13147949
Farid T, Ali S, Sajid M, Akhtar K. Sustainability of Project-Based Learning by Incorporating Transdisciplinary Design in Fabrication of Hydraulic Robot Arm. Sustainability. 2021; 13(14):7949. https://doi.org/10.3390/su13147949
Chicago/Turabian StyleFarid, Taha, Sara Ali, Muhammad Sajid, and Khalid Akhtar. 2021. "Sustainability of Project-Based Learning by Incorporating Transdisciplinary Design in Fabrication of Hydraulic Robot Arm" Sustainability 13, no. 14: 7949. https://doi.org/10.3390/su13147949
APA StyleFarid, T., Ali, S., Sajid, M., & Akhtar, K. (2021). Sustainability of Project-Based Learning by Incorporating Transdisciplinary Design in Fabrication of Hydraulic Robot Arm. Sustainability, 13(14), 7949. https://doi.org/10.3390/su13147949