
Adaptive Predictive Control with Neuro-Fuzzy Parameter Estimation for Microgrid Grid-Forming Converters



Abstract
:1. Introduction
- We present a theoretical analysis of LC-filter parameter variation dynamics (Section 3.1);
- To extend the operational range of the estimator, we introduce a new neural–trained fuzzy logic parameter estimator for islanded AC microgrids (Section 4.2);
- The new estimator is then embedded in a comprehensive adaptive predictive control scheme for microgrid converters (Section 3). The overall scheme has much better performance than a conventional MPC under parametric mismatches, with results verified via extensive simulations and hardware-in-the-loop (HiL) experiments.
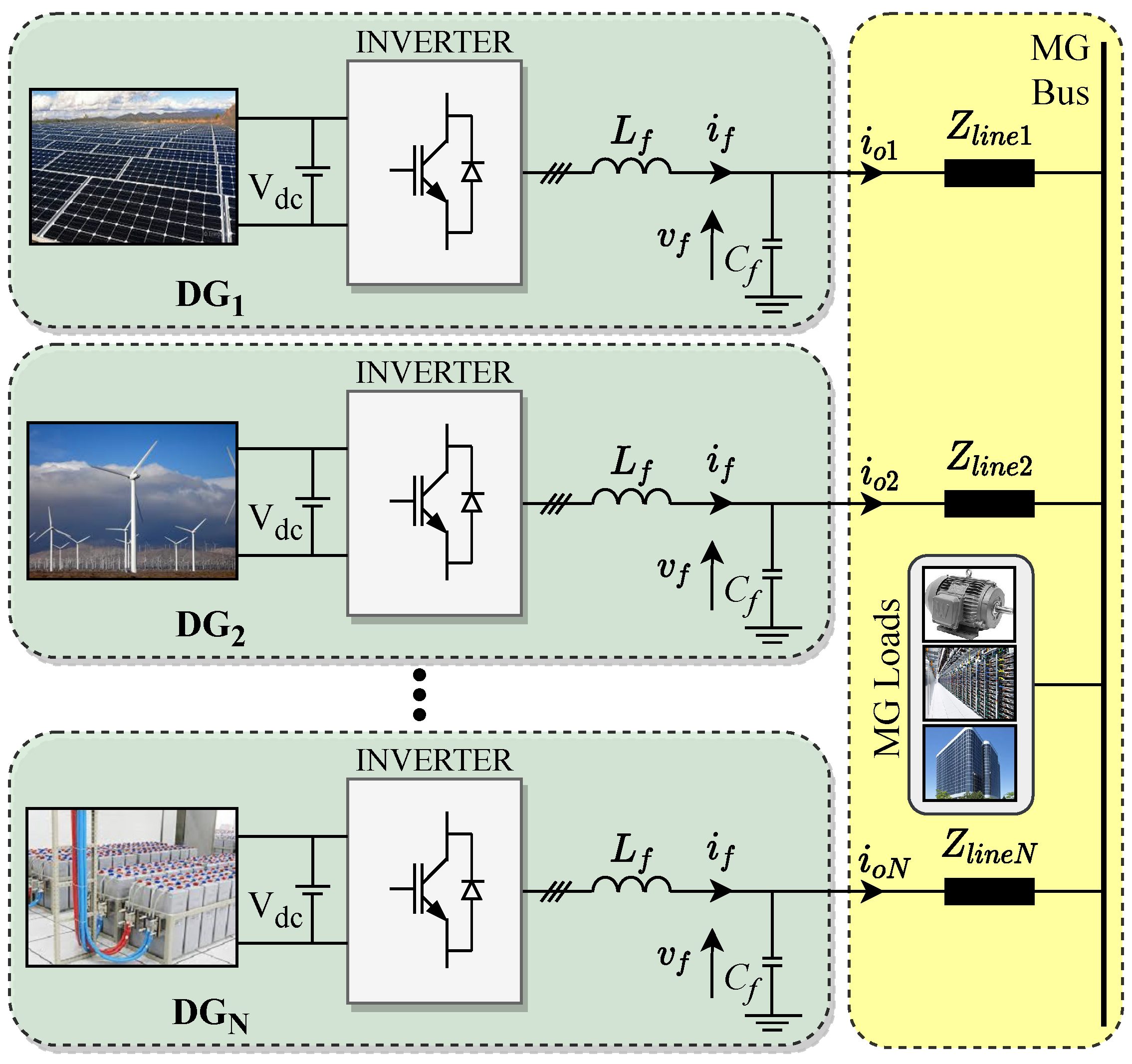
2. Conventional Dual-Objective Model Predictive Inverter Control
2.1. LC Filter
2.2. Cost Function
2.3. Droop Relationship
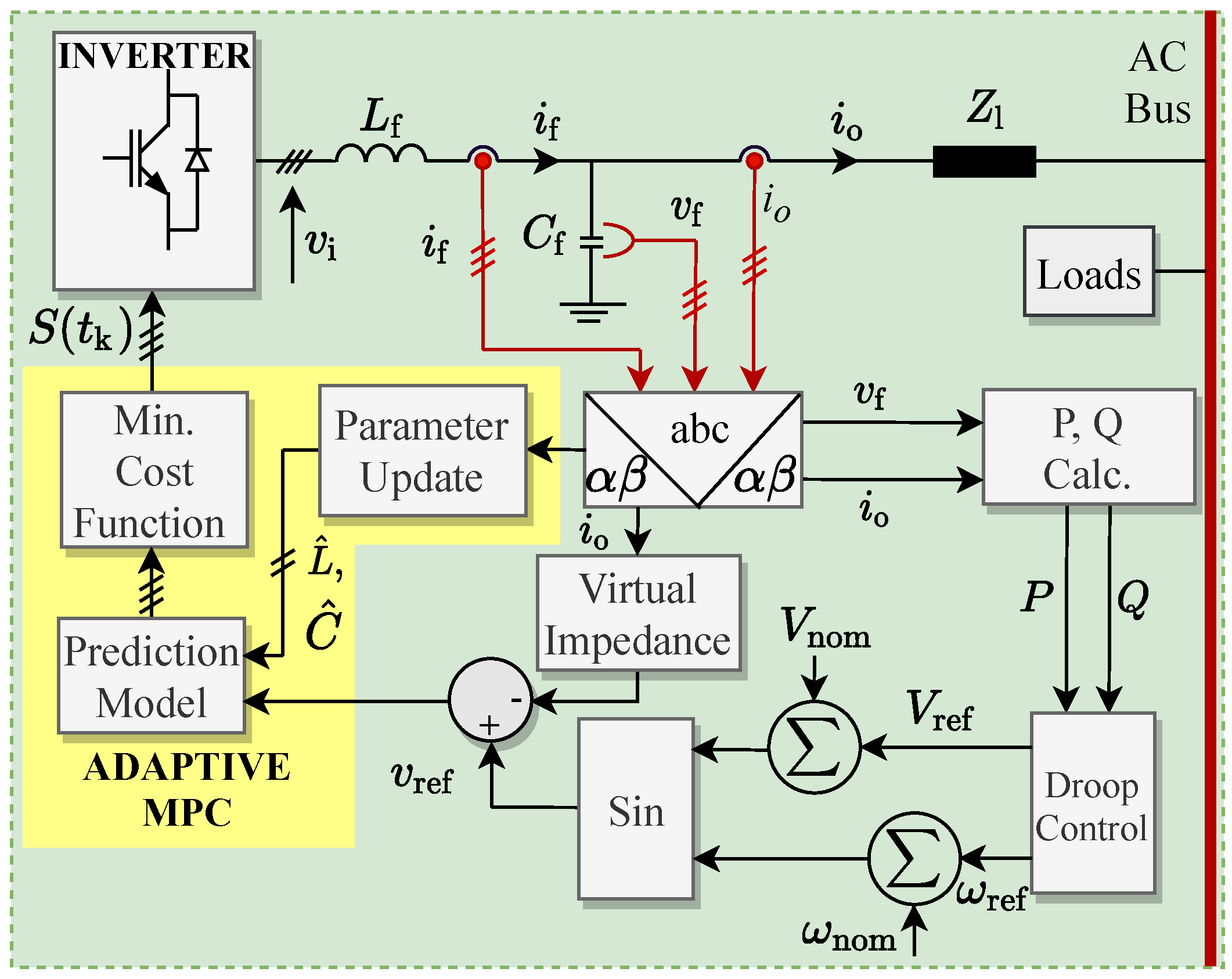
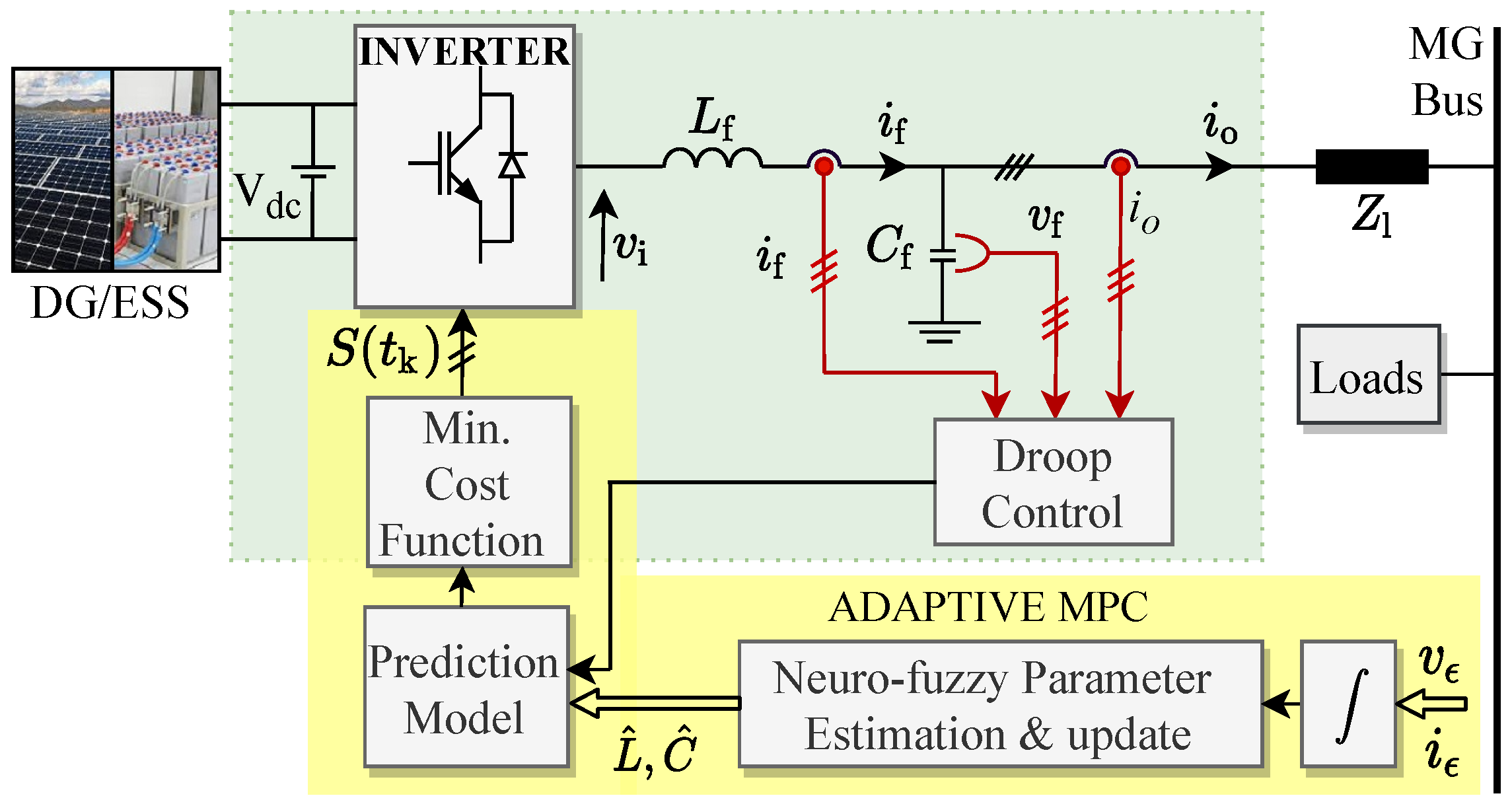
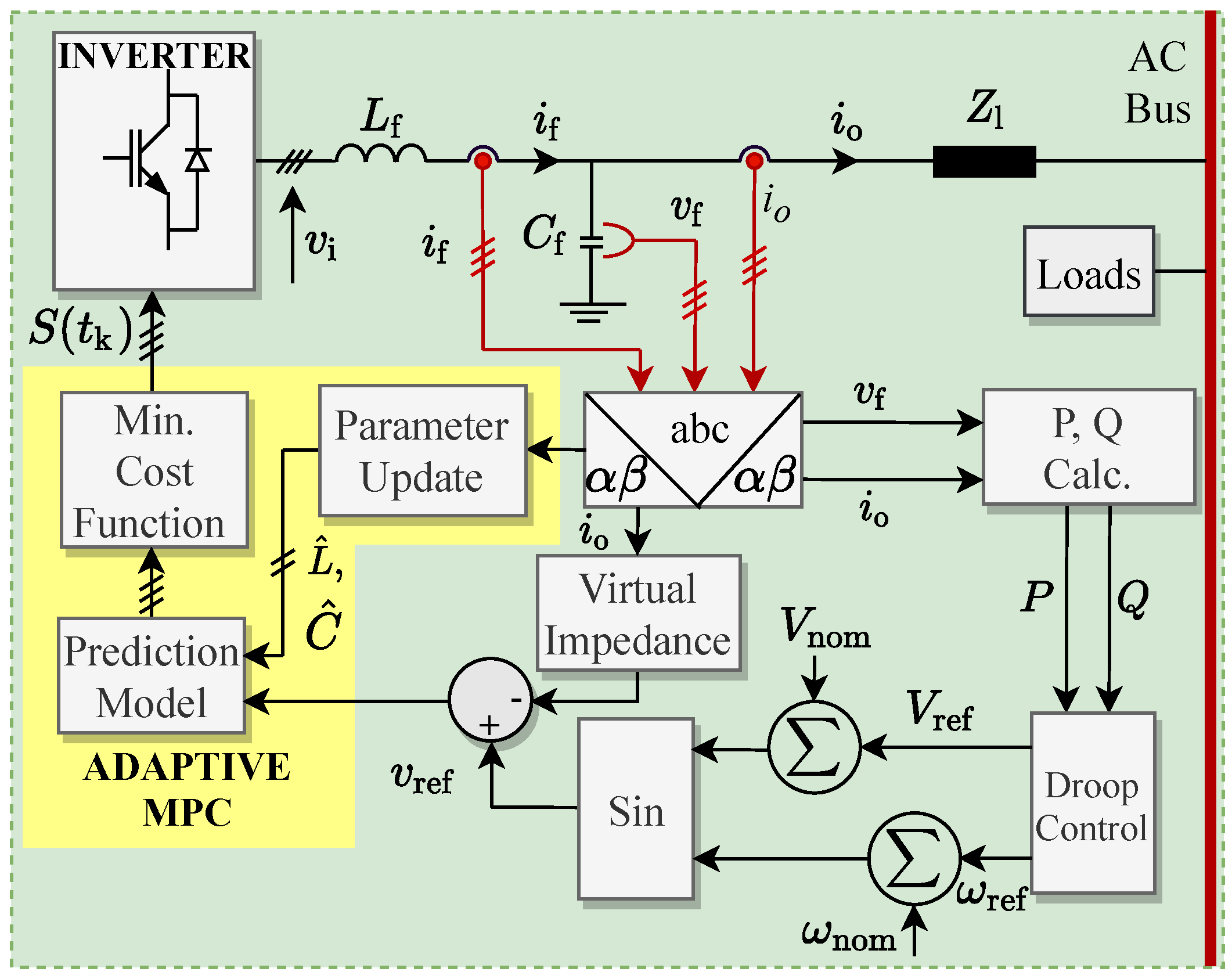
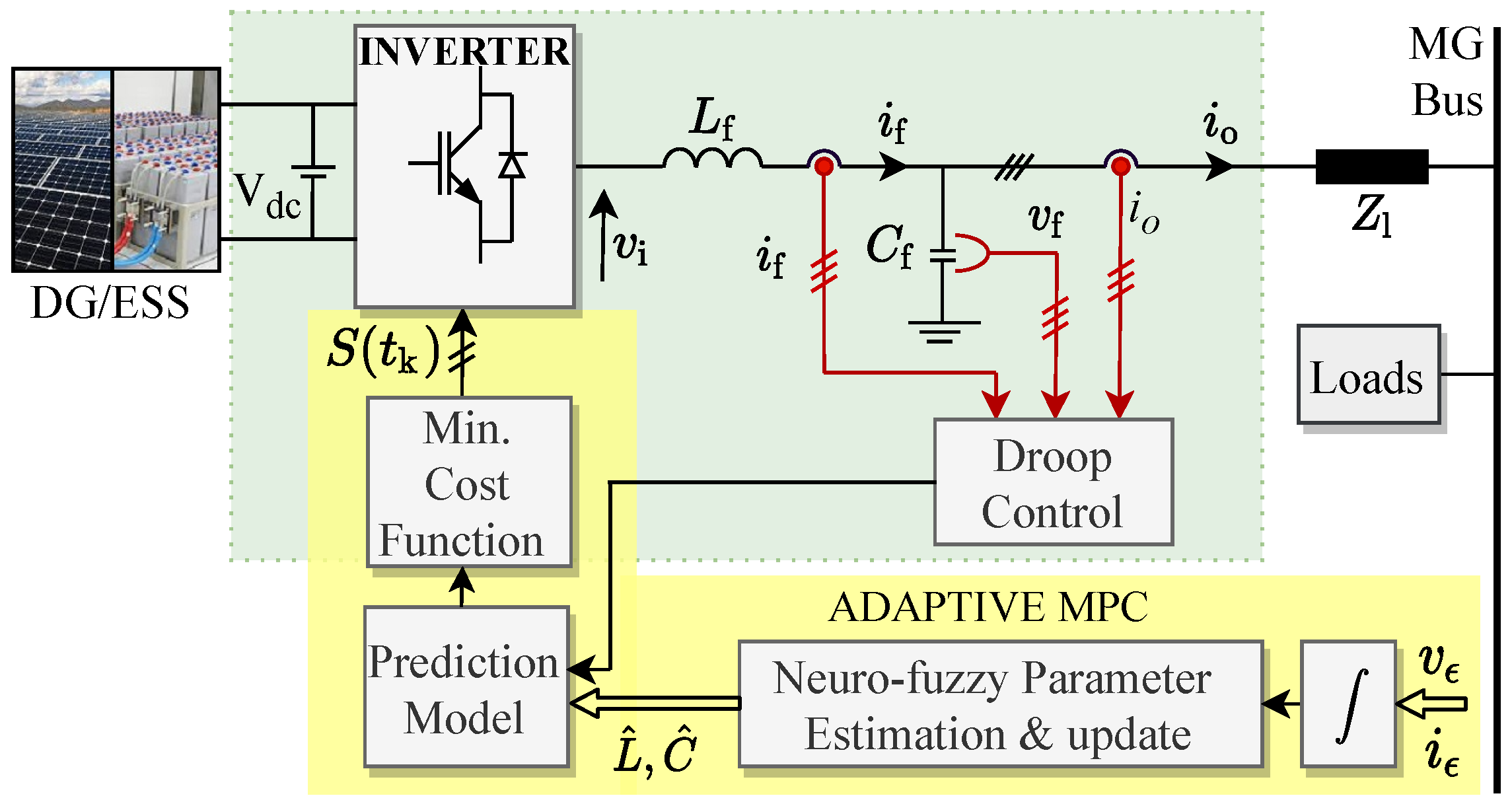
3. The Proposed Adaptive MPC Scheme
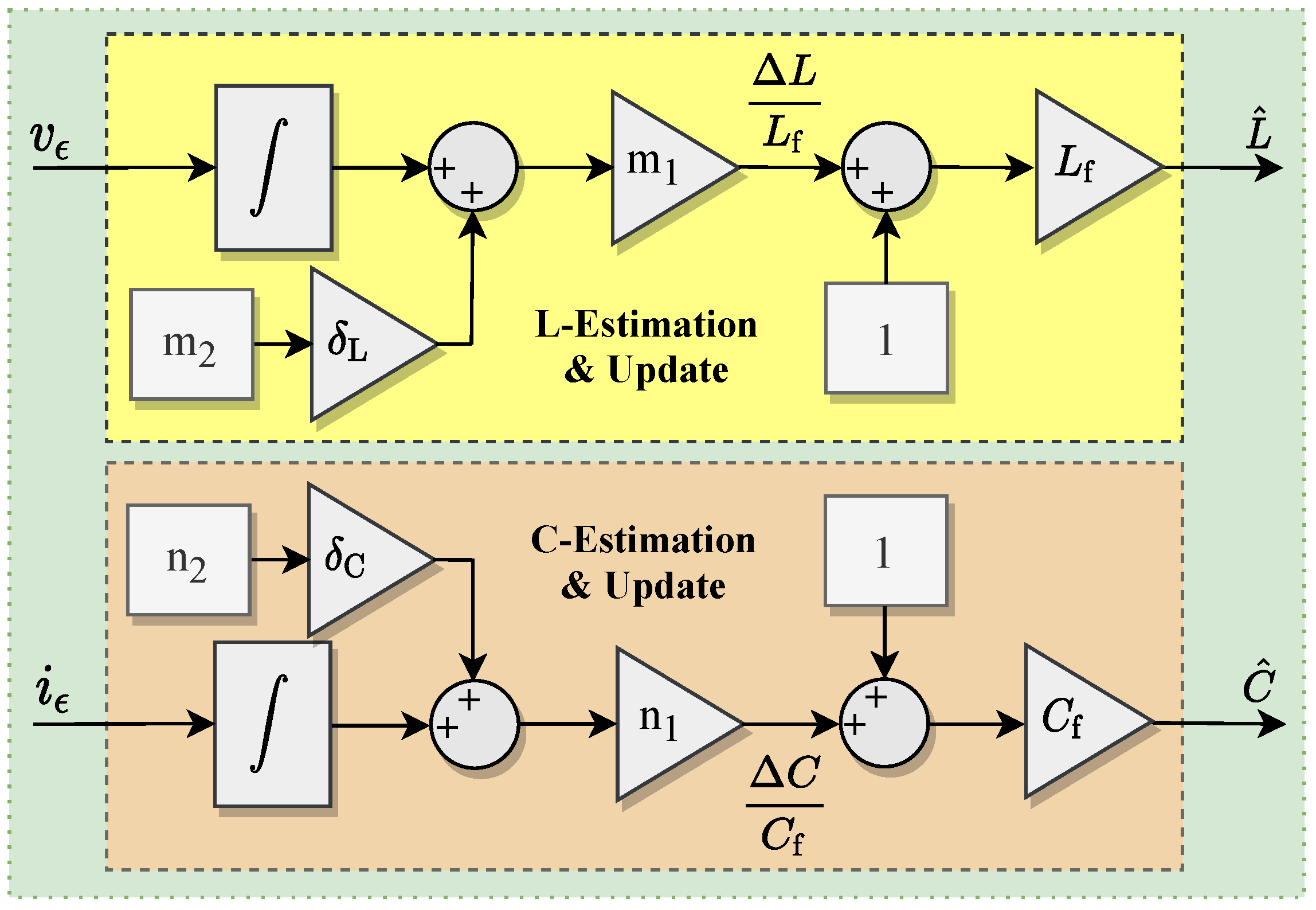
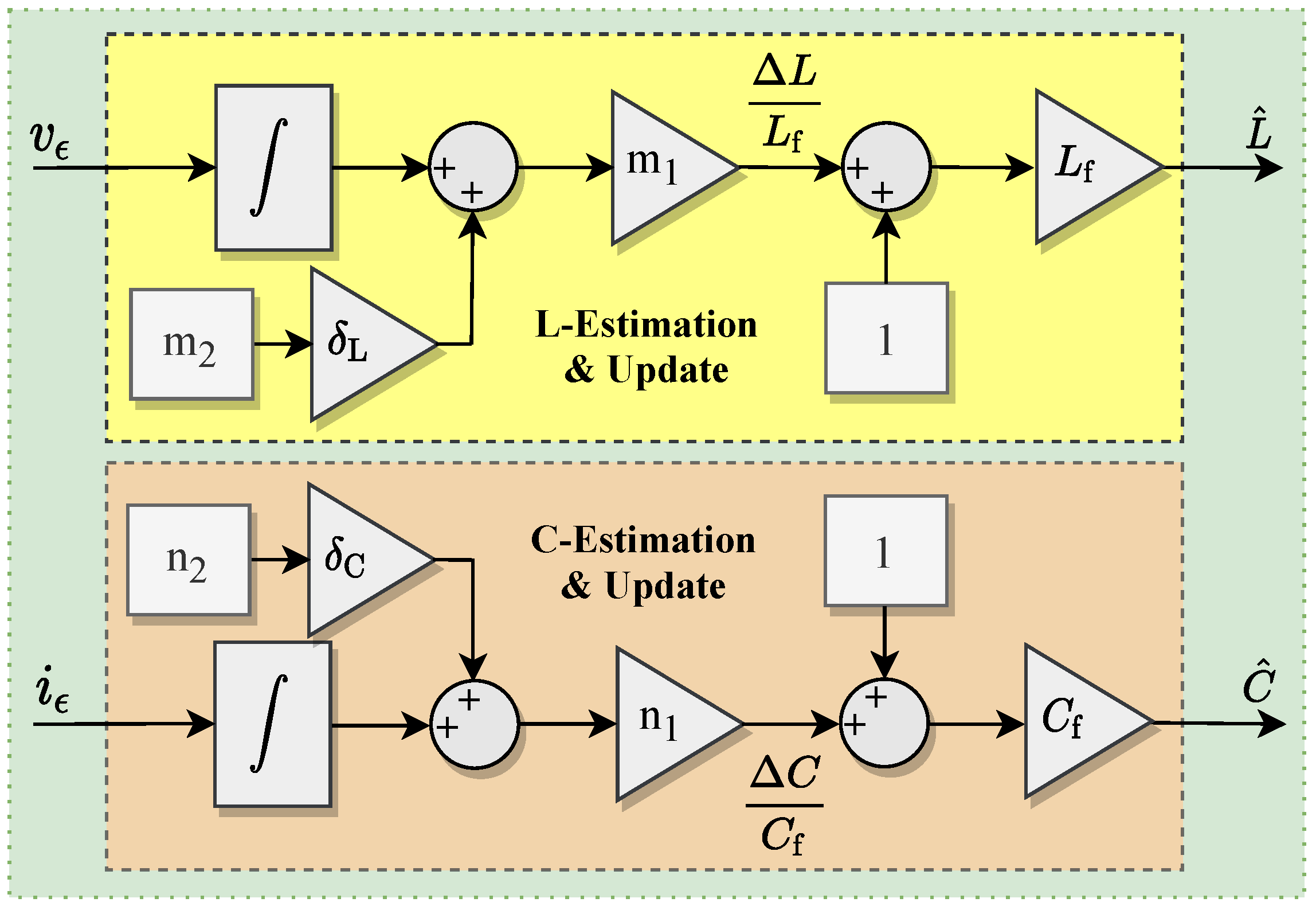
3.1. Parameter Estimation and Adaptive Model Update
3.1.1. Inductance Variation Estimation
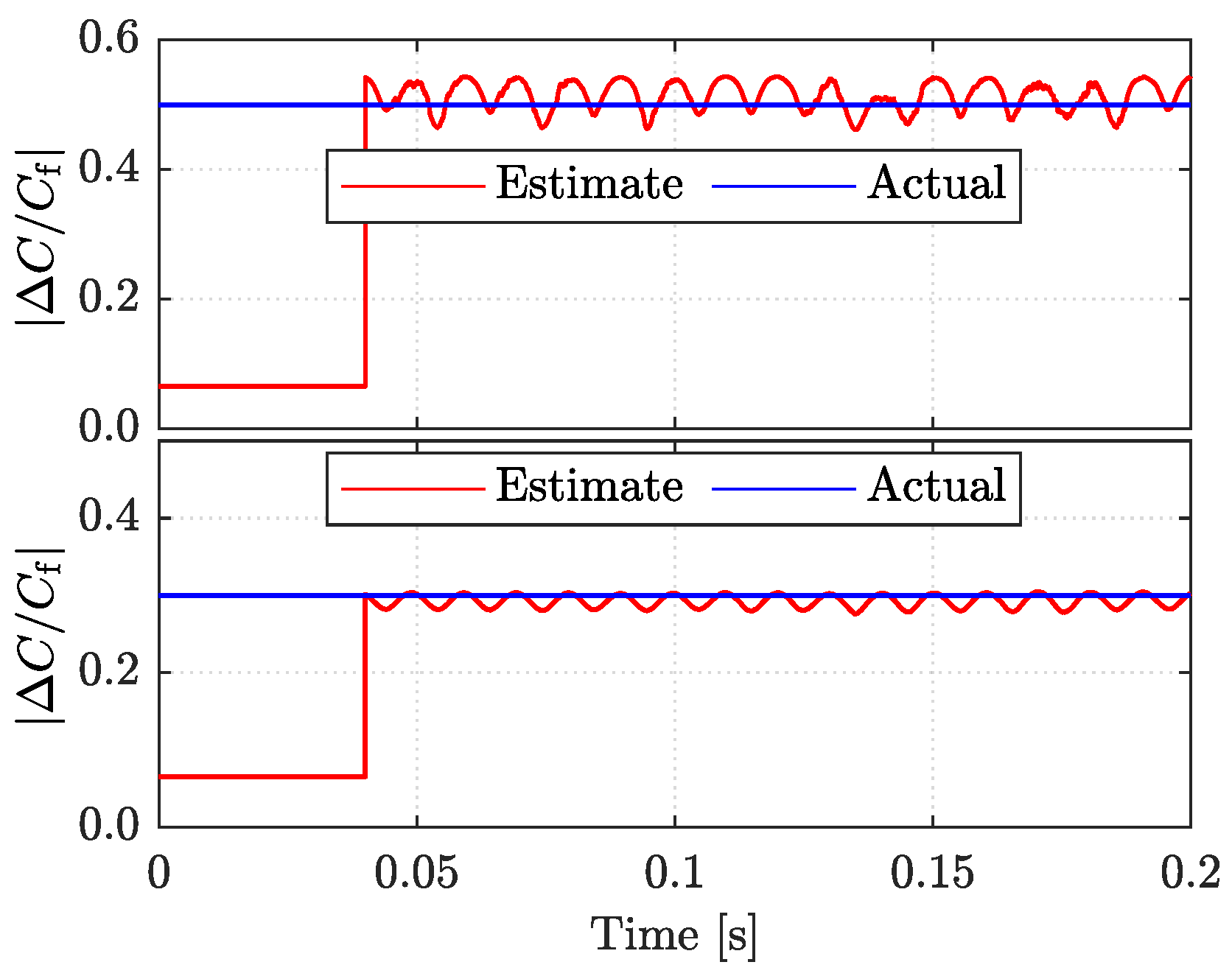
3.1.2. Capacitance Variation Estimation
3.2. Adaptive Model Update
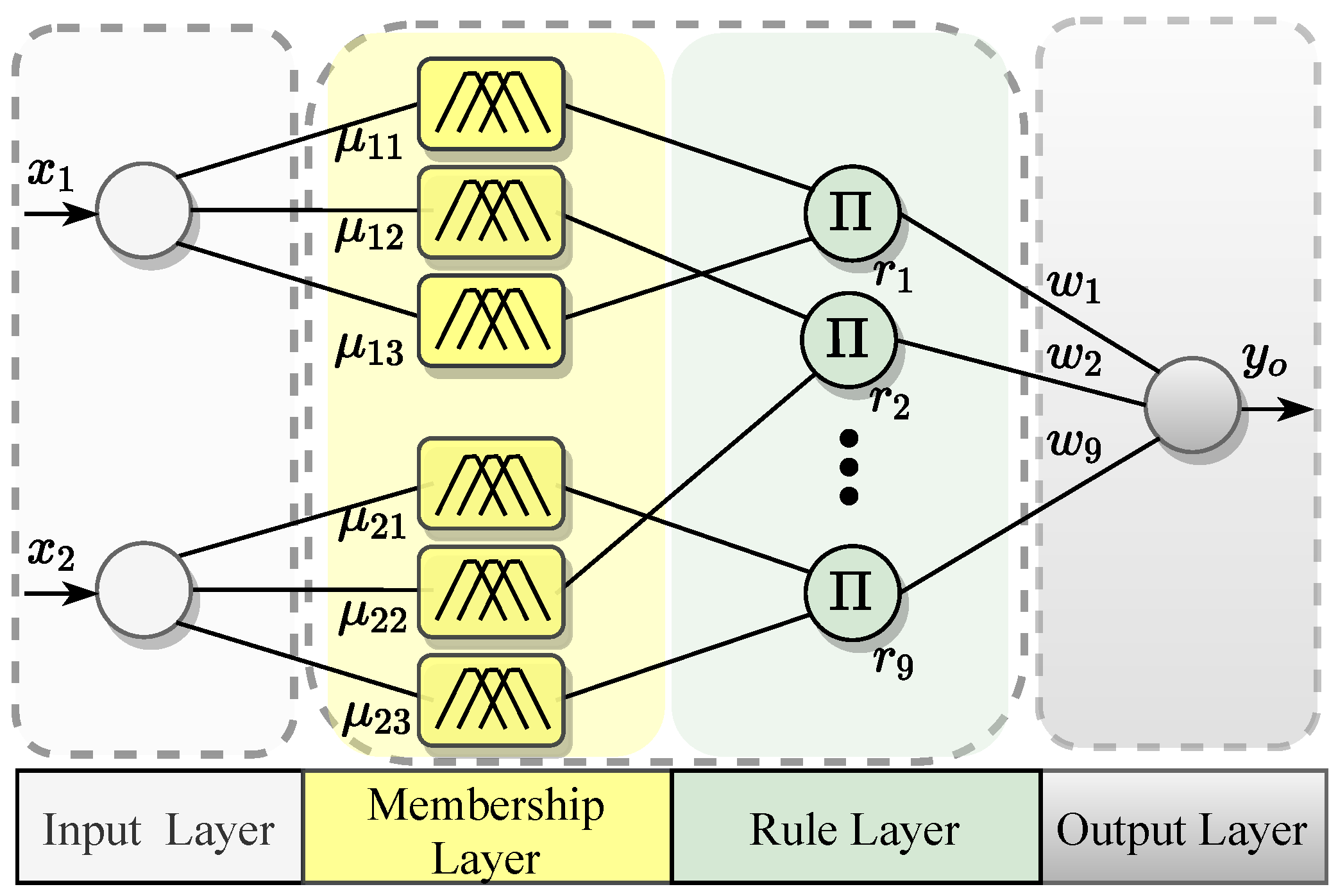
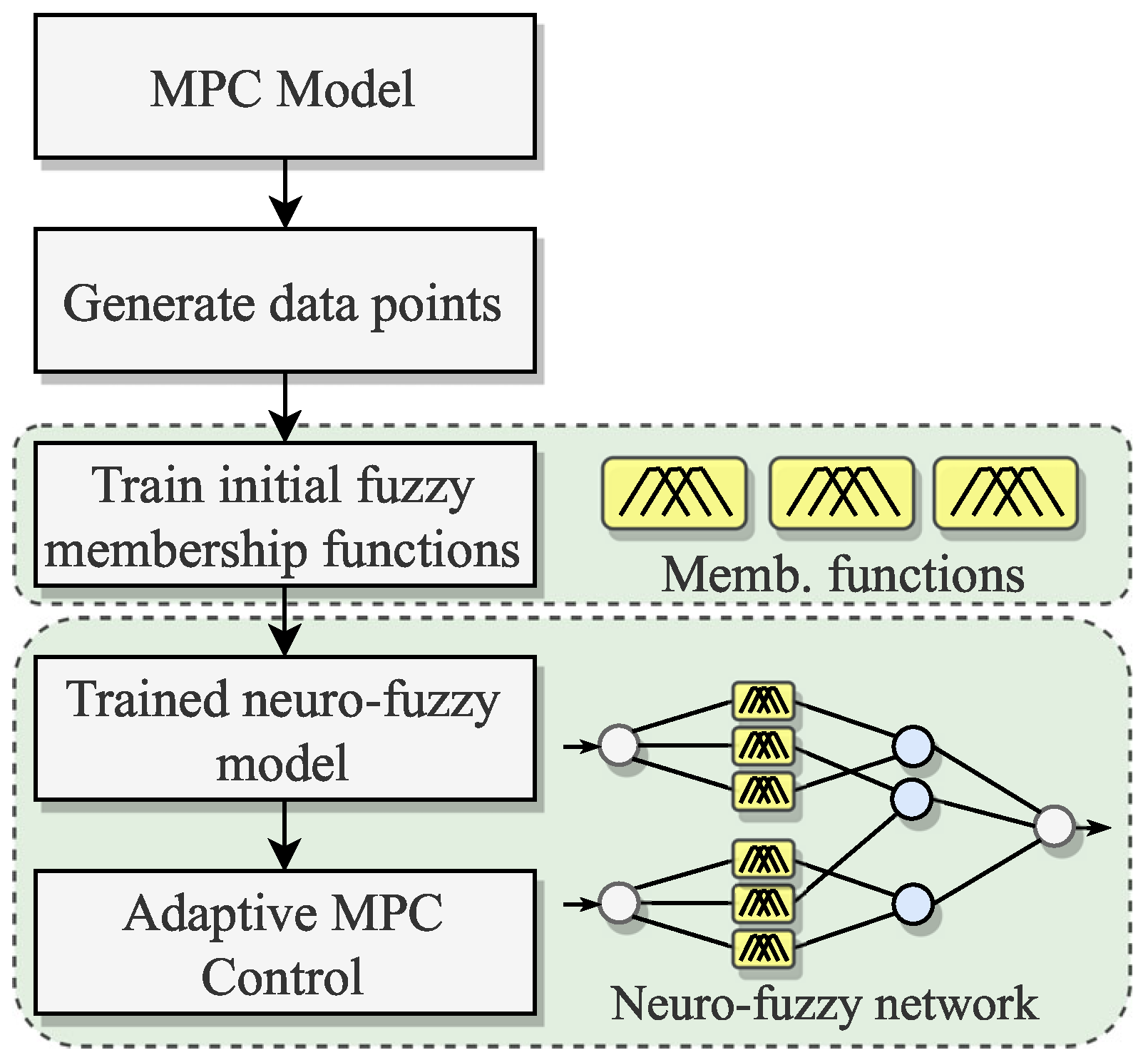
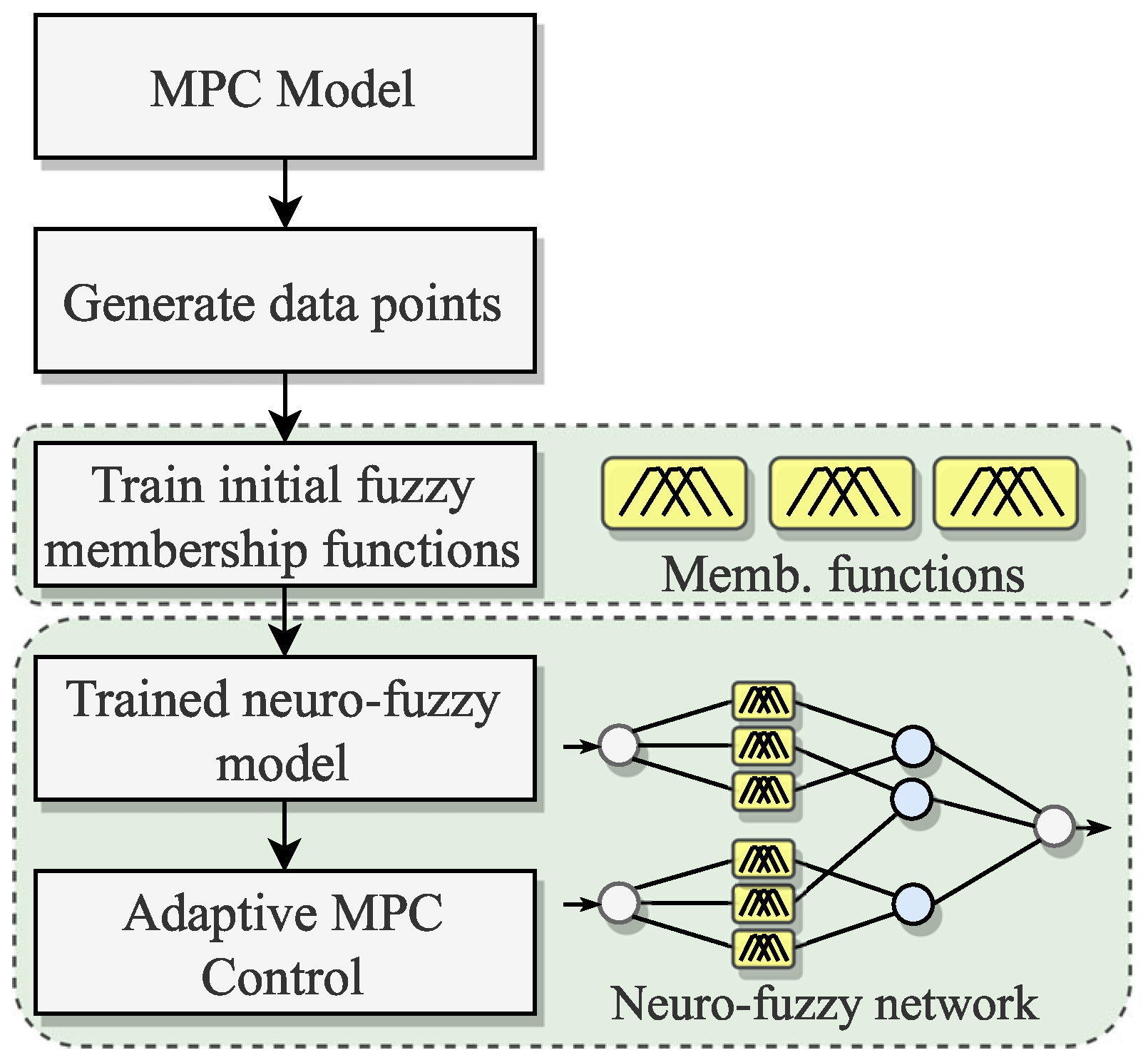
4. The Proposed Neuro-Fuzzy Parameter Estimator
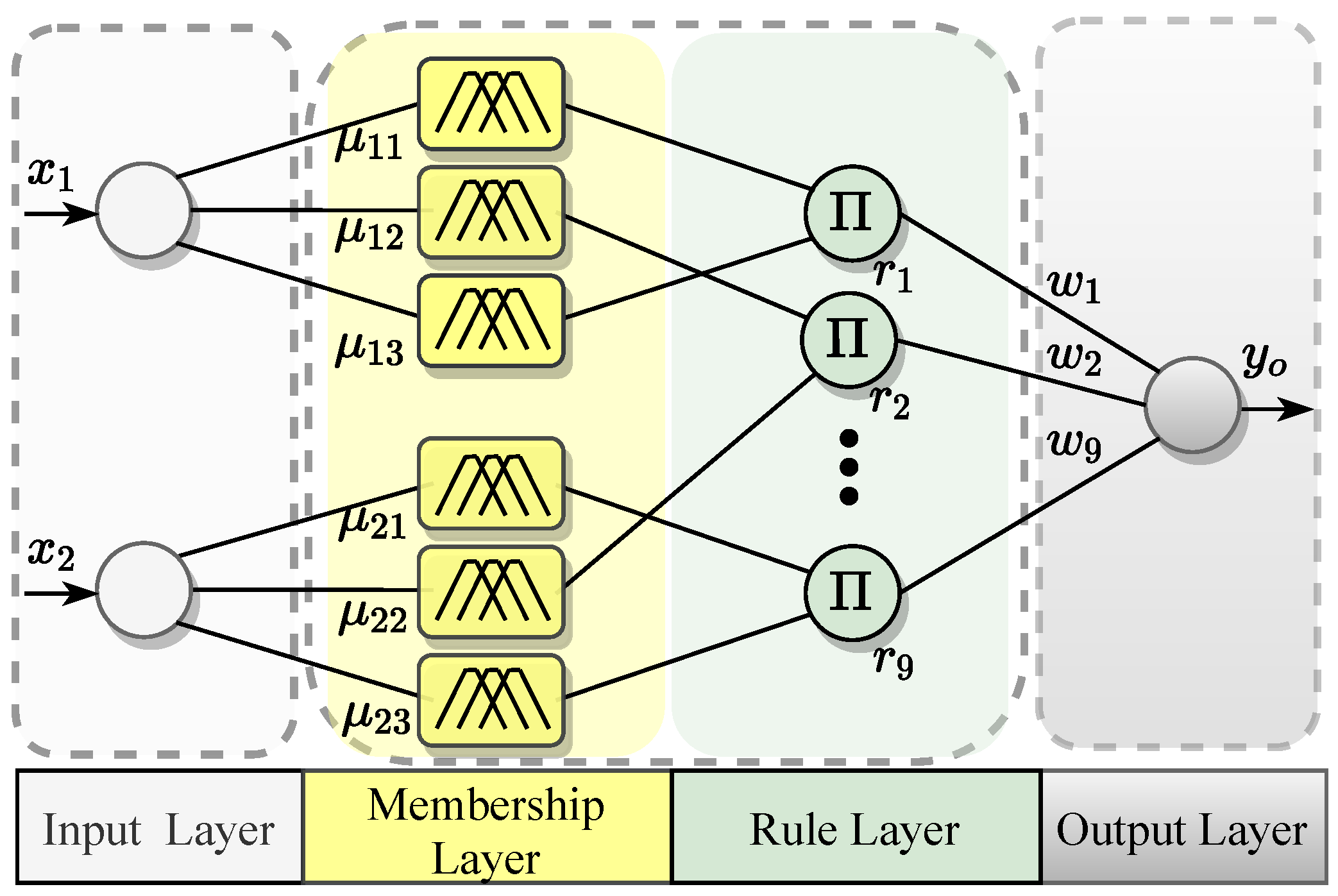
4.1. Principles of Adaptive Neuro-Fuzzy Control
4.1.1. The Input Layer
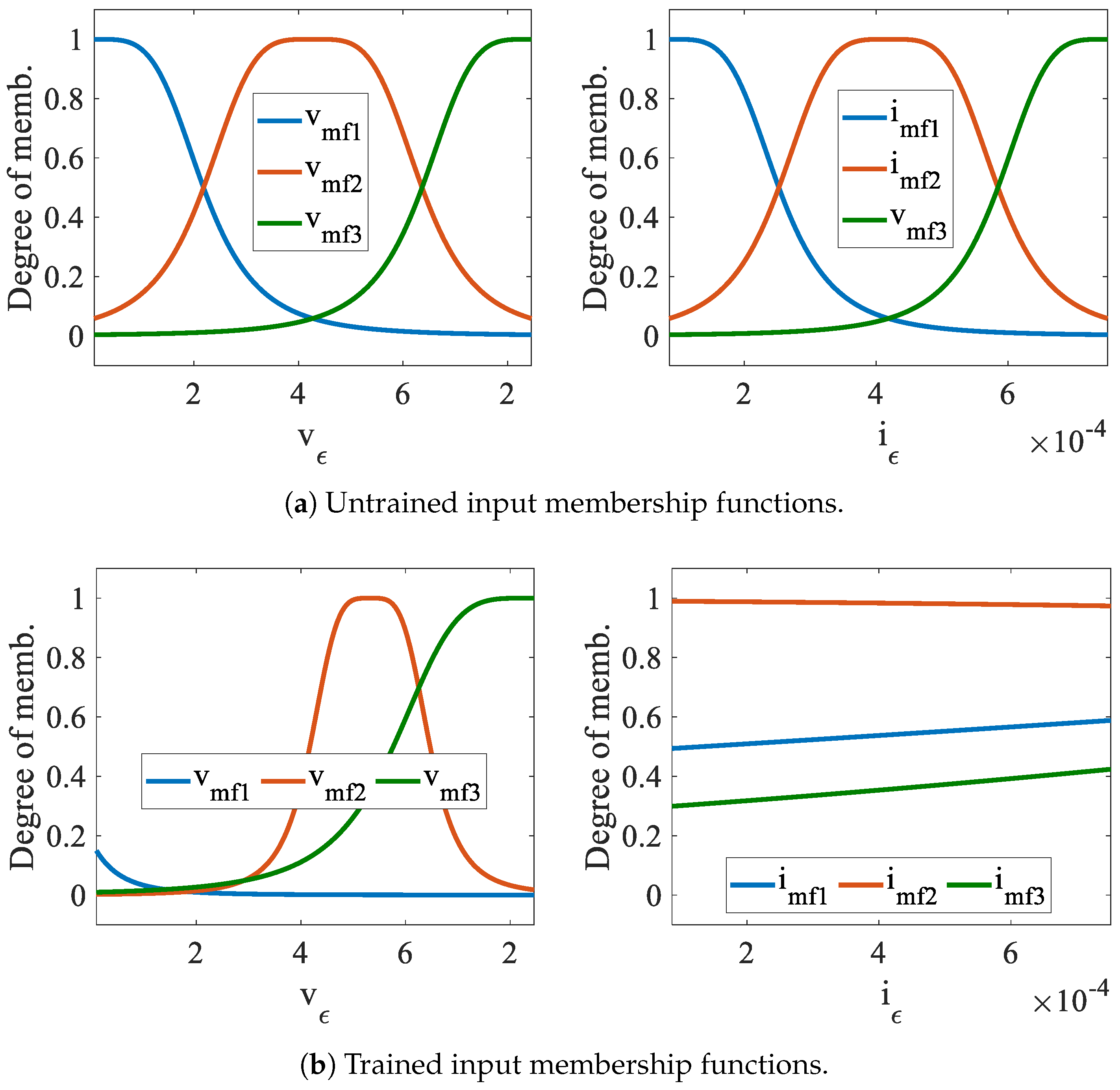
4.1.2. The Membership Layer
4.1.3. The Rule Layer
4.1.4. The Output Layer
4.2. Neuro-Fuzzy Parameter Estimation
5. Results and Discussion
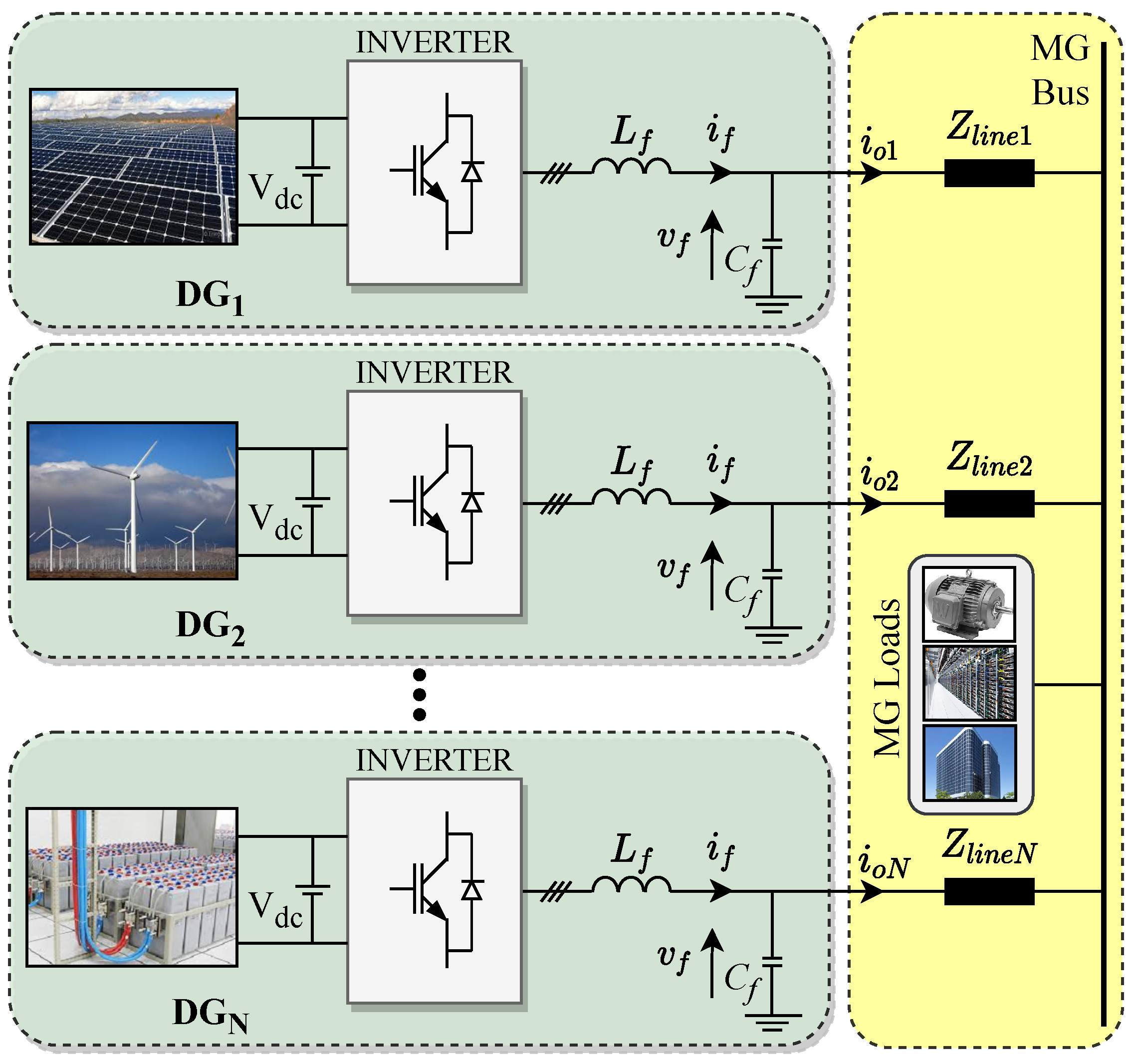
5.1. System Description
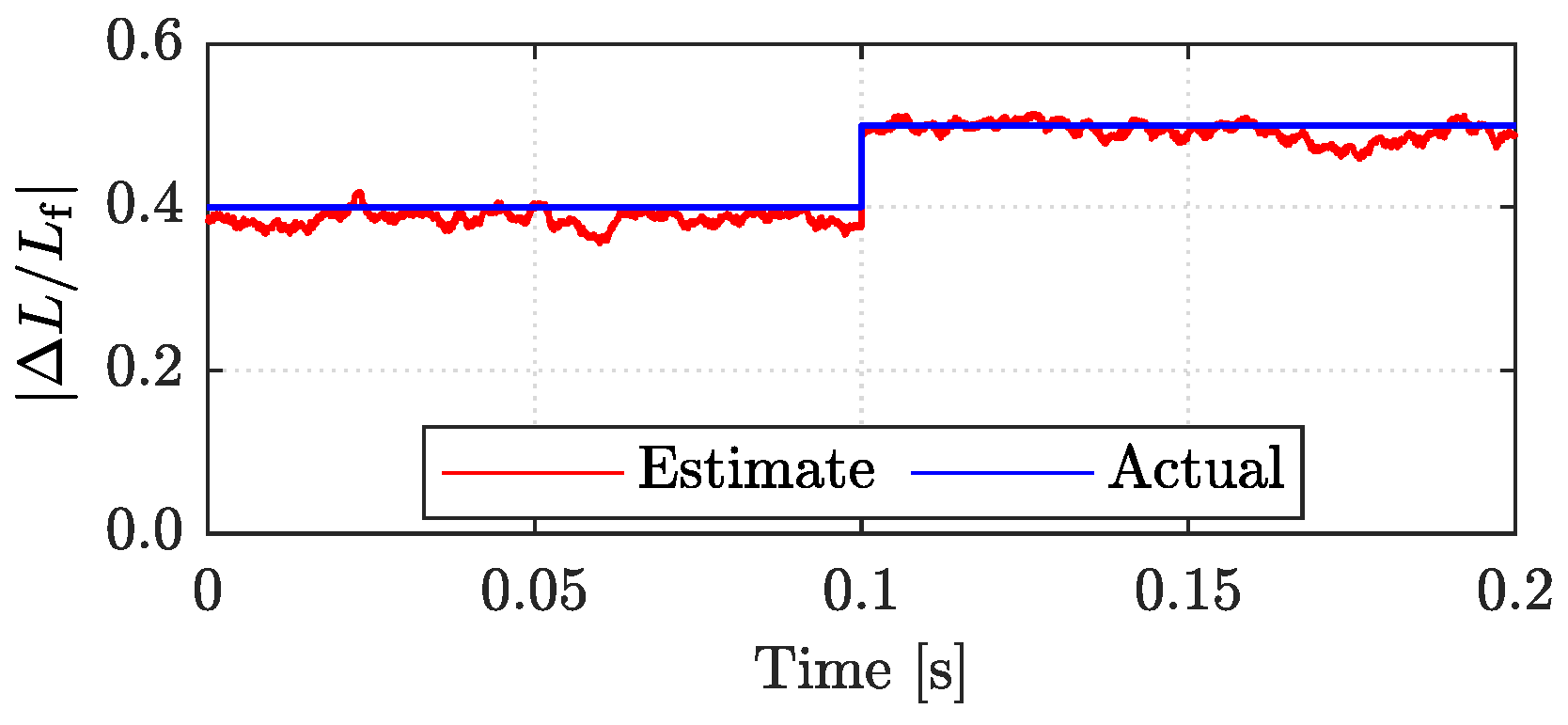
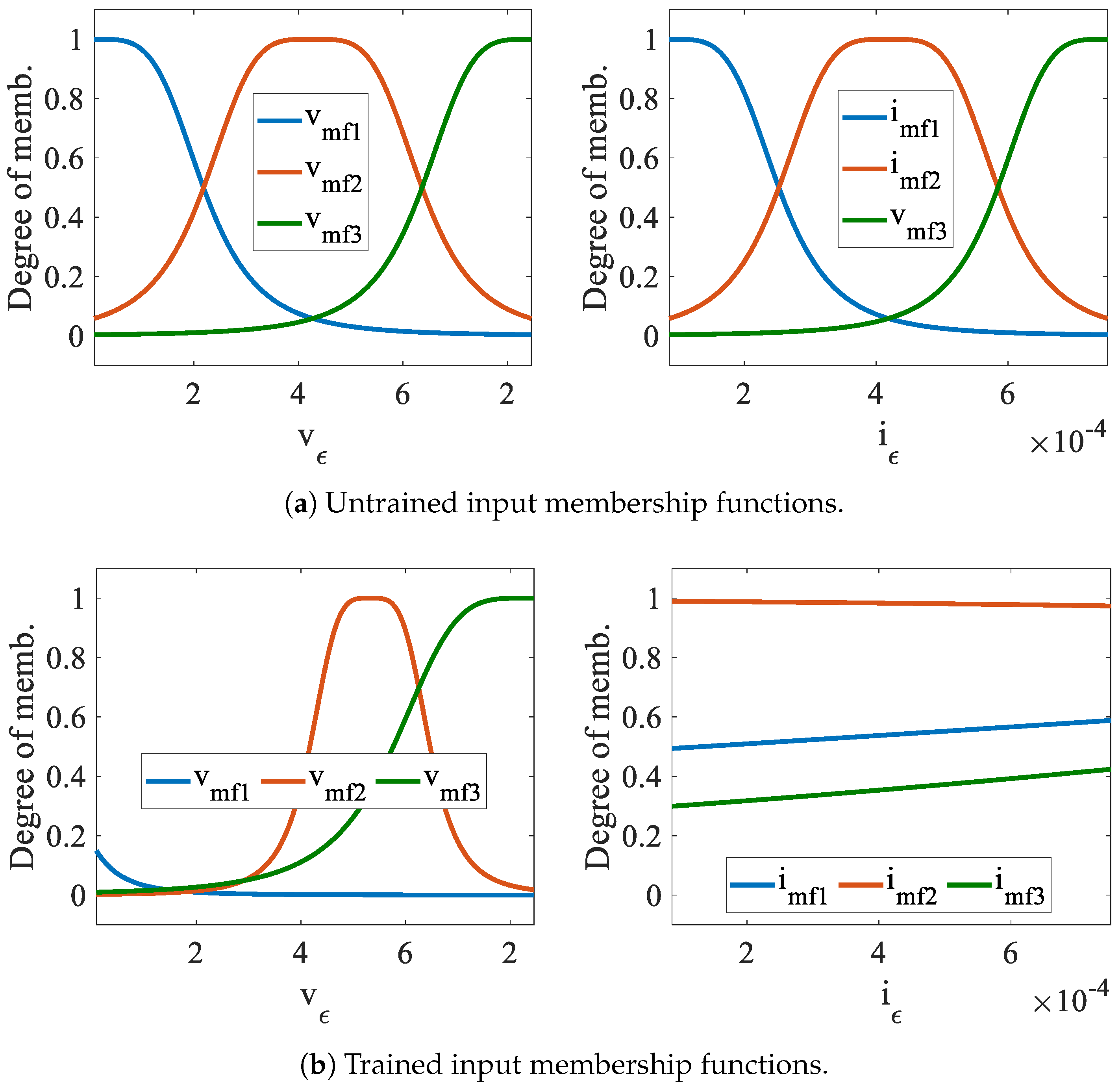
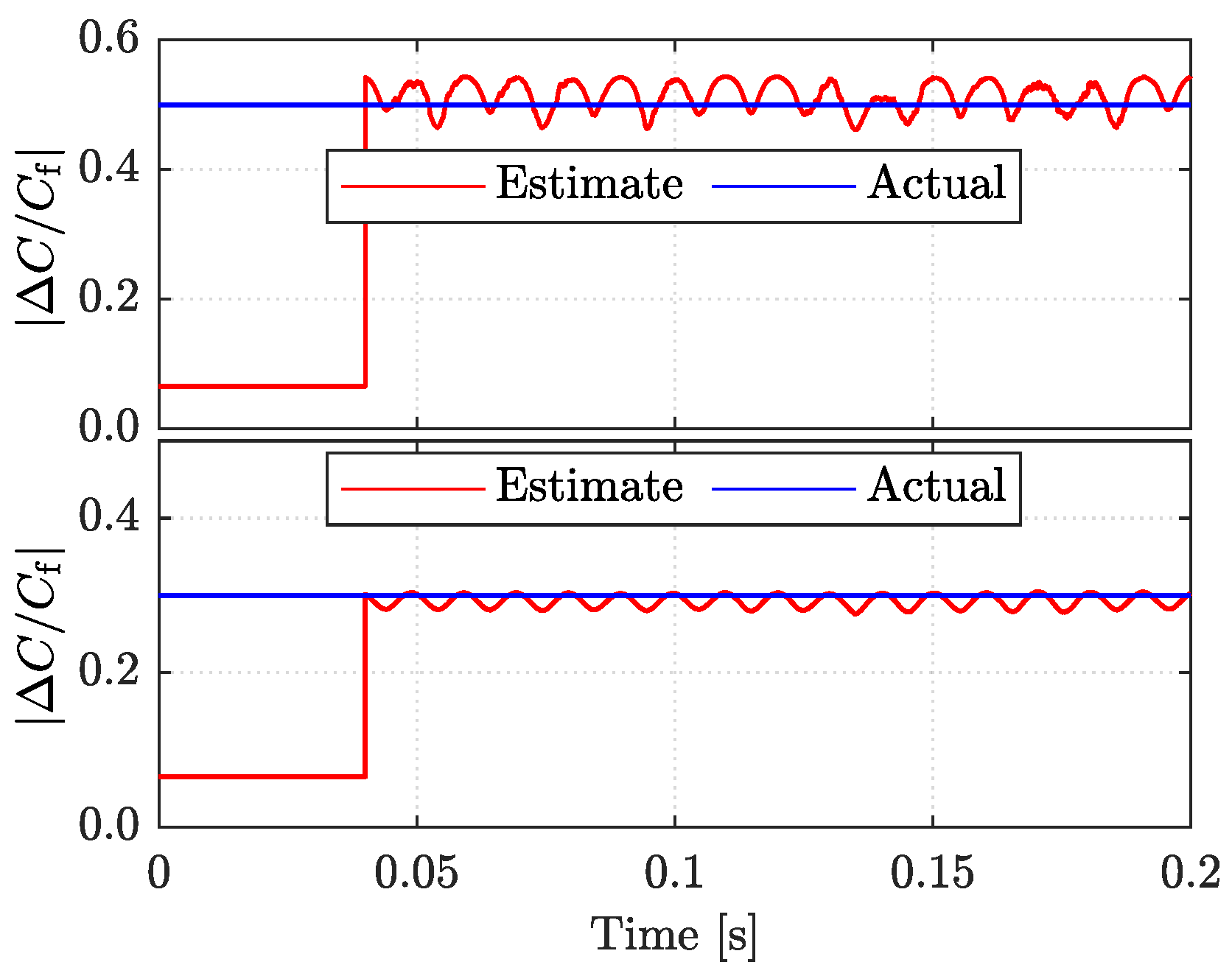
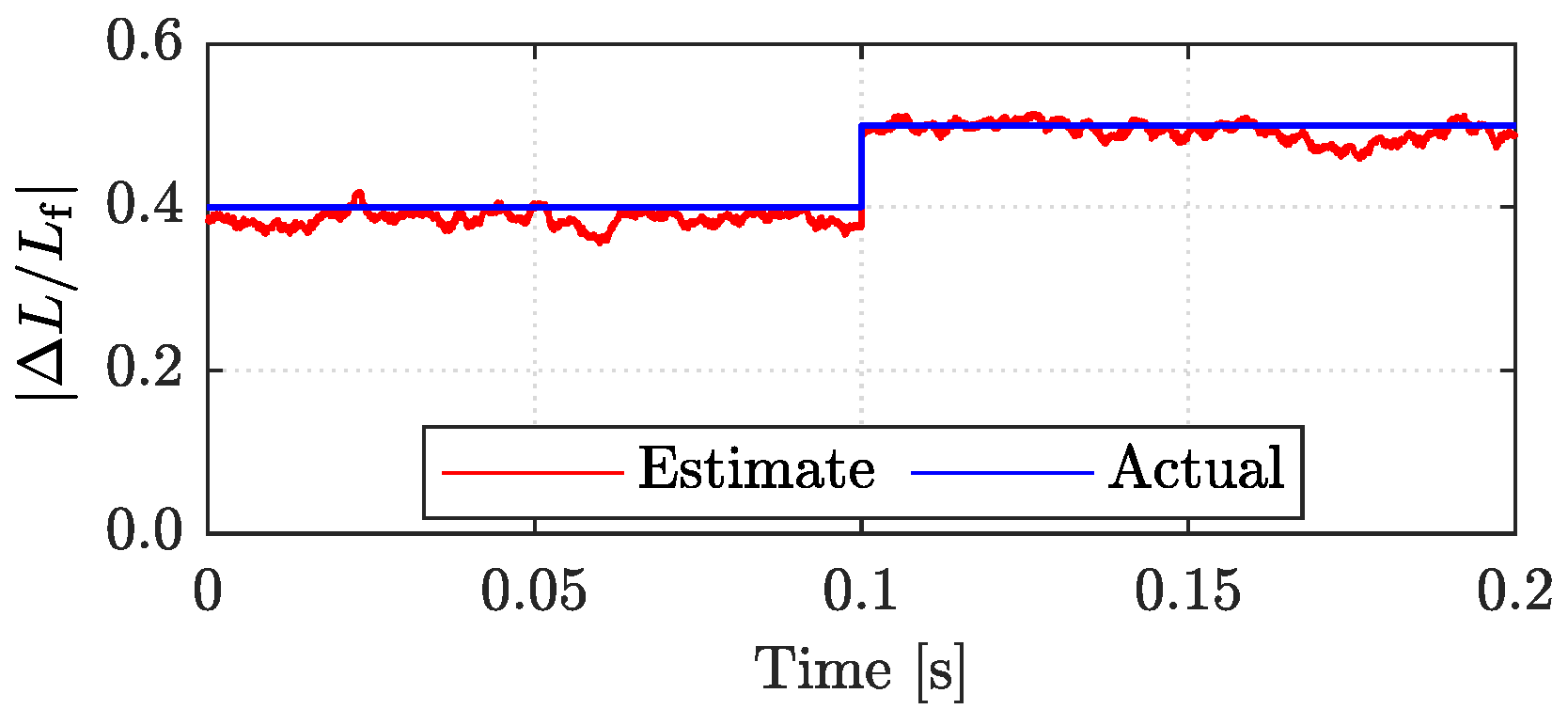
5.2. Parameter Estimation
5.3. Neuro-Fuzzy Transient Performance
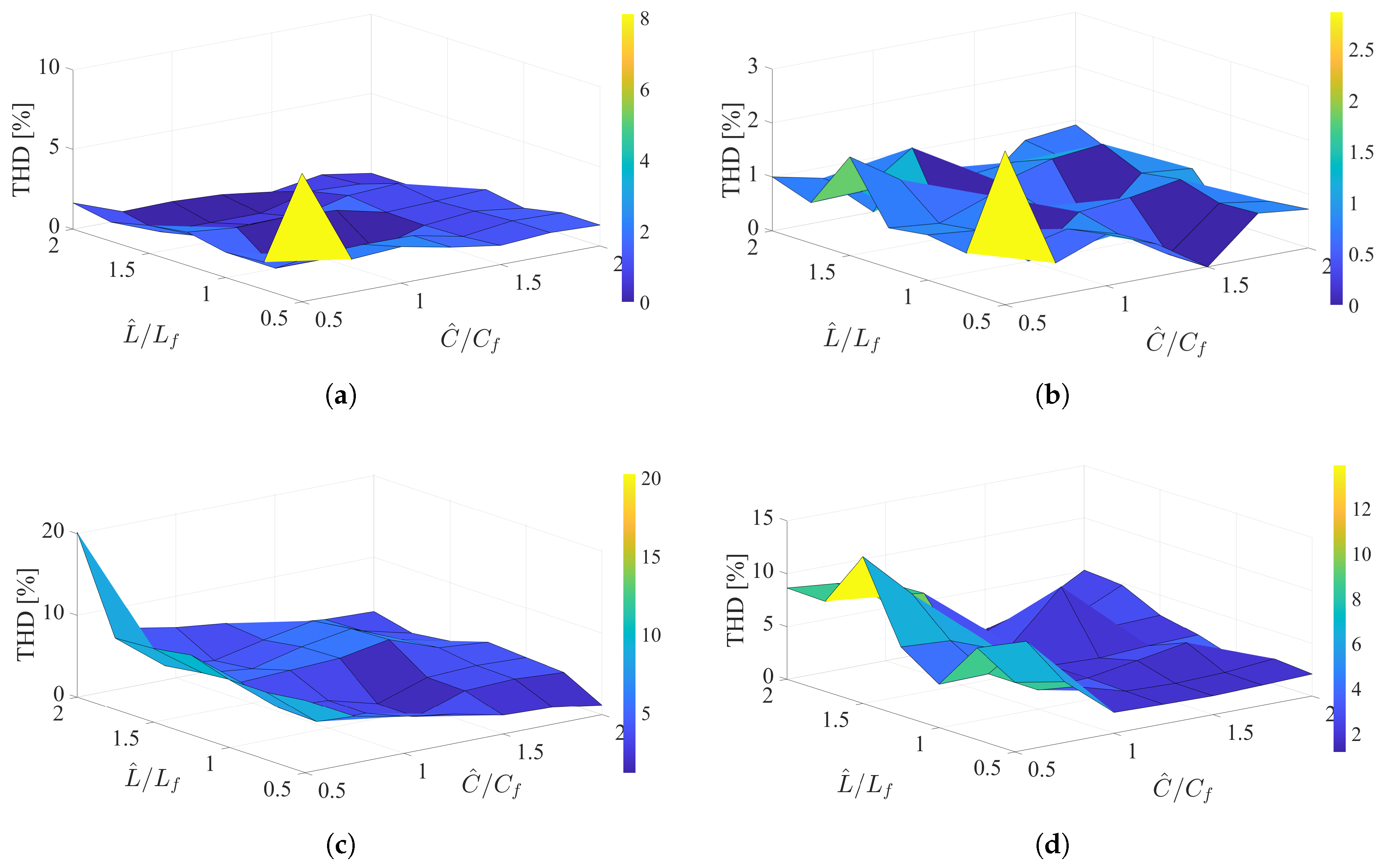
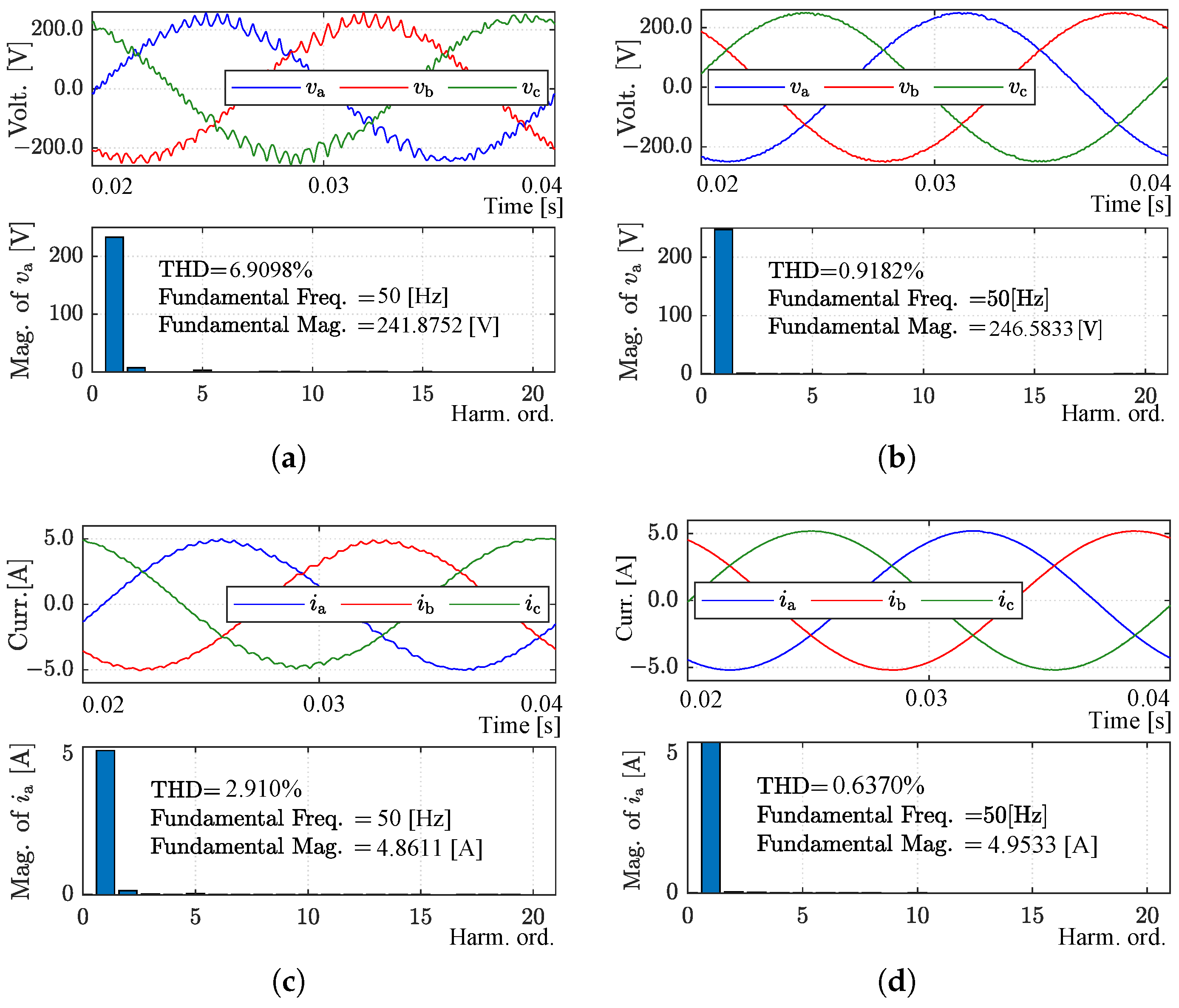
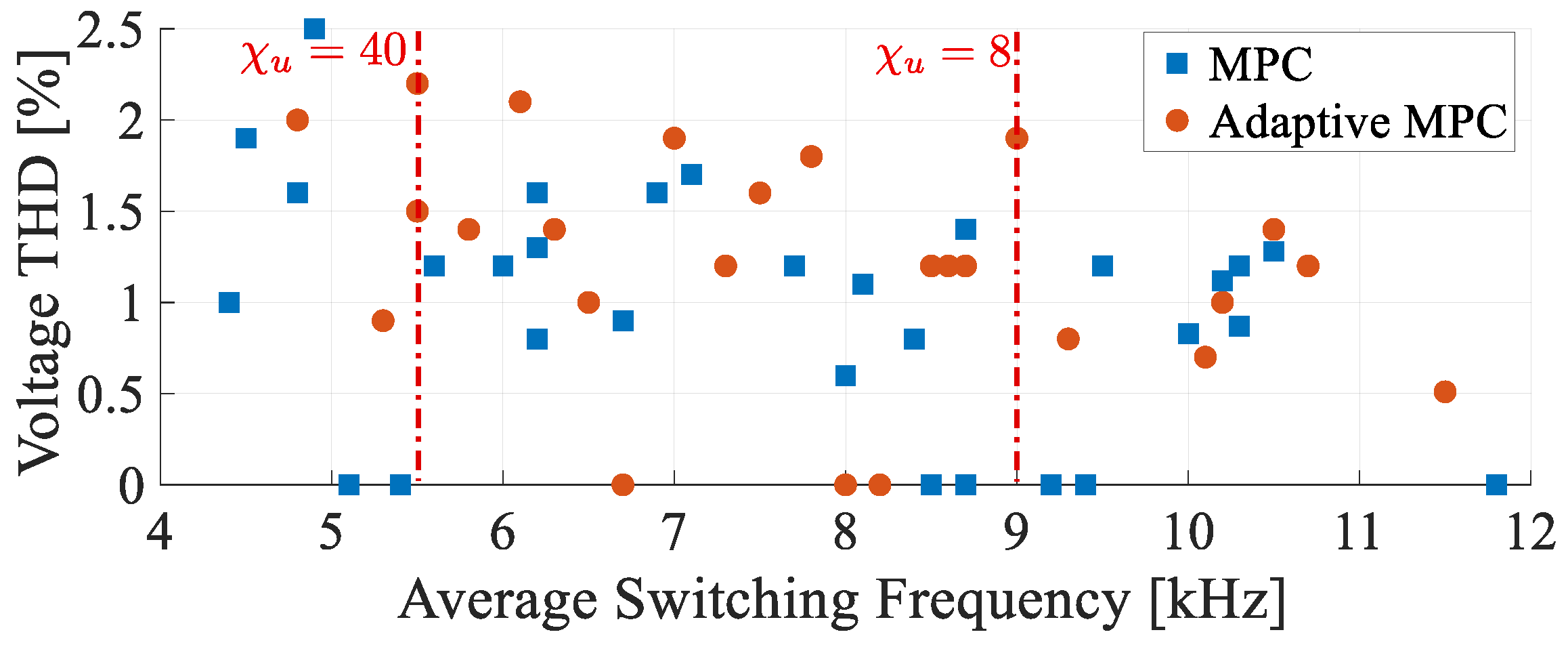
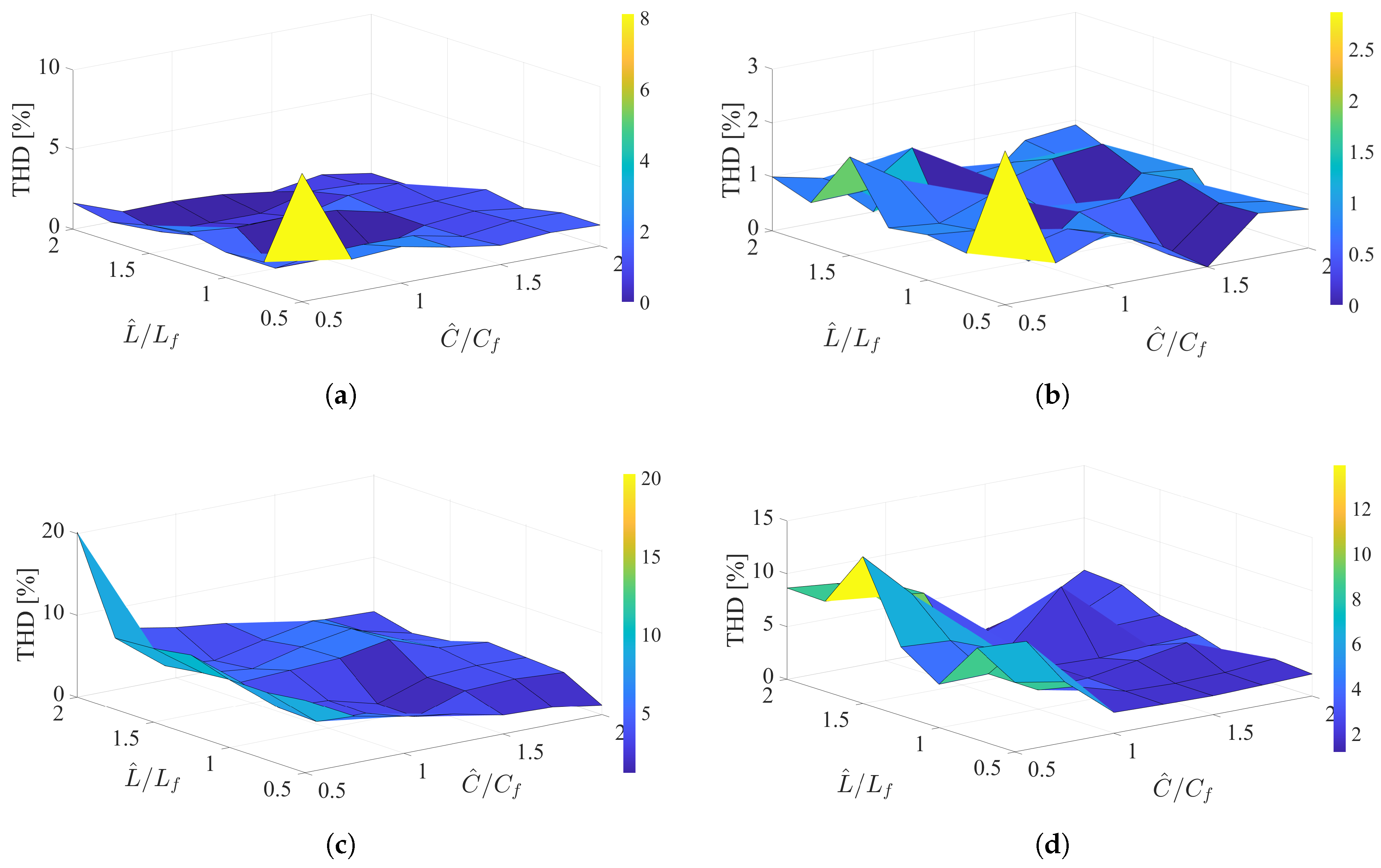
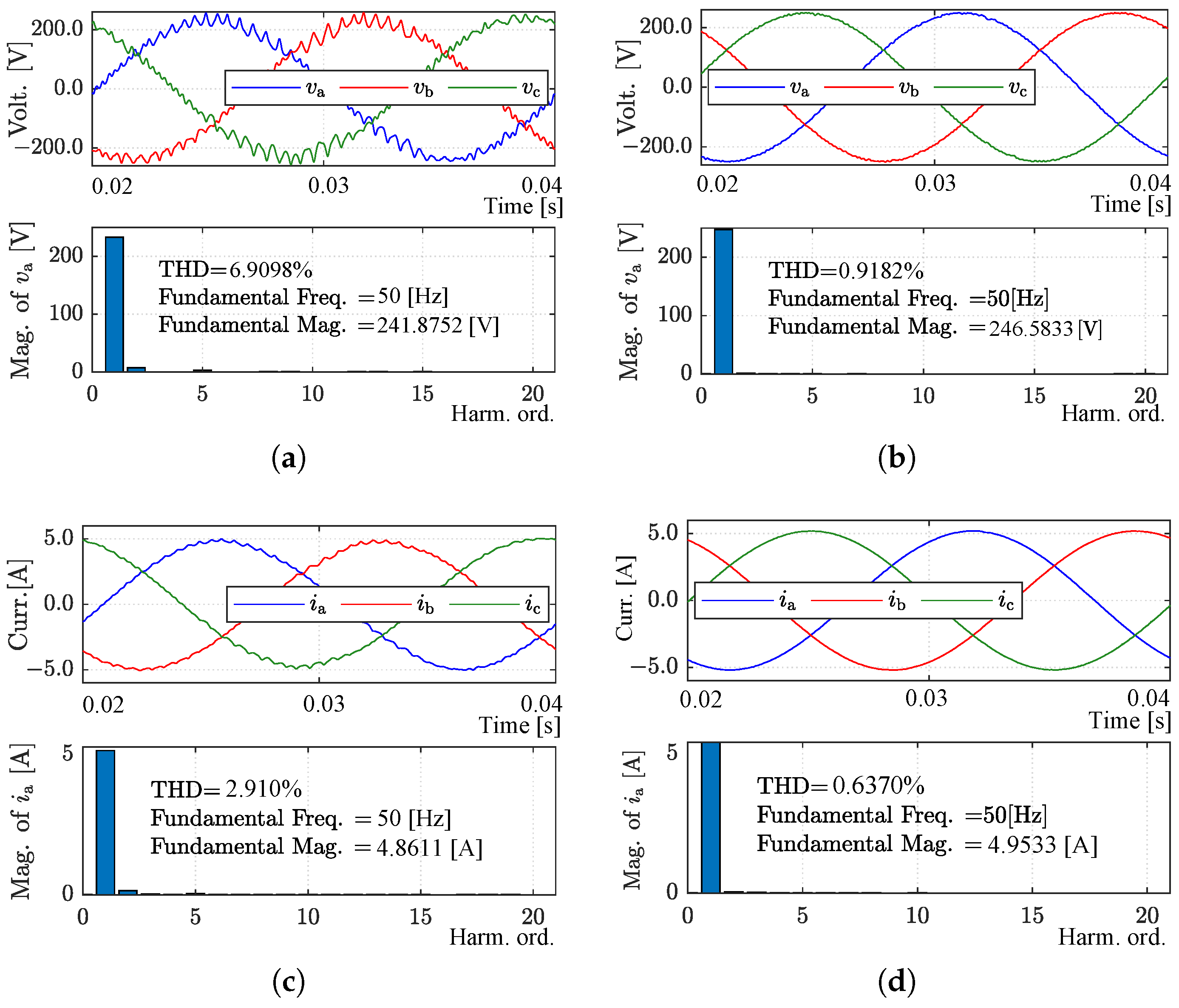
5.4. Steady-State Performance
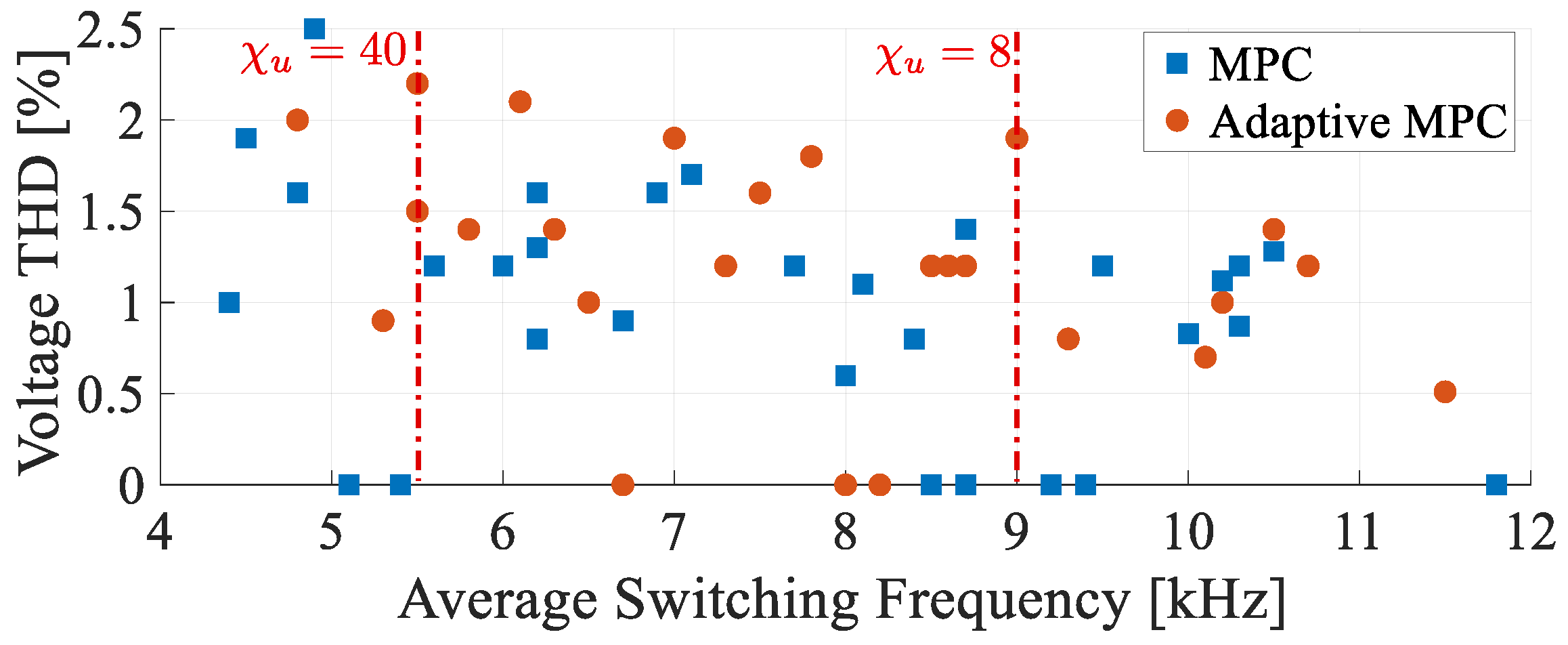
5.5. Overall Performance
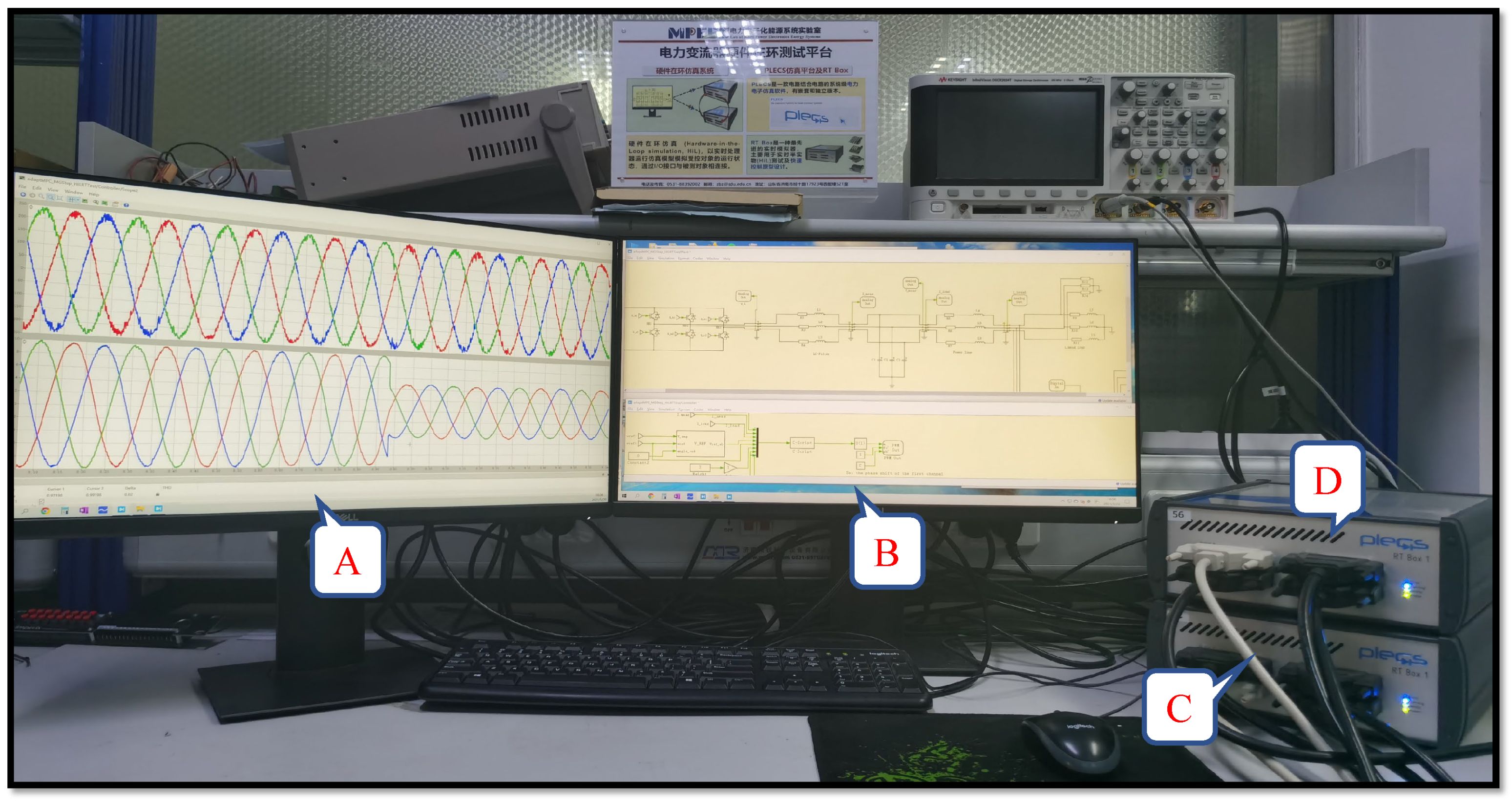
5.6. Real-Time Hardware-in-the-Loop Verification
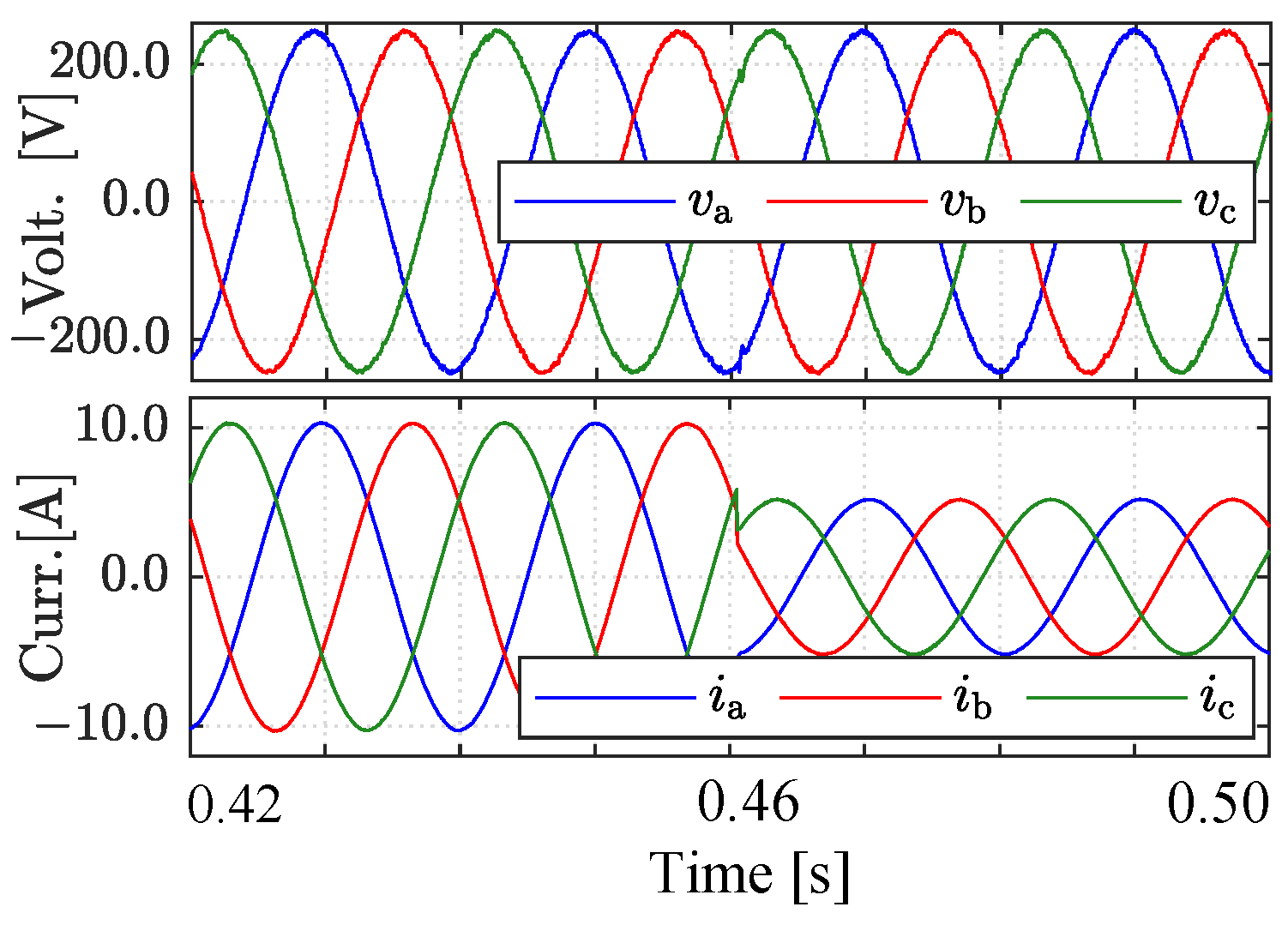
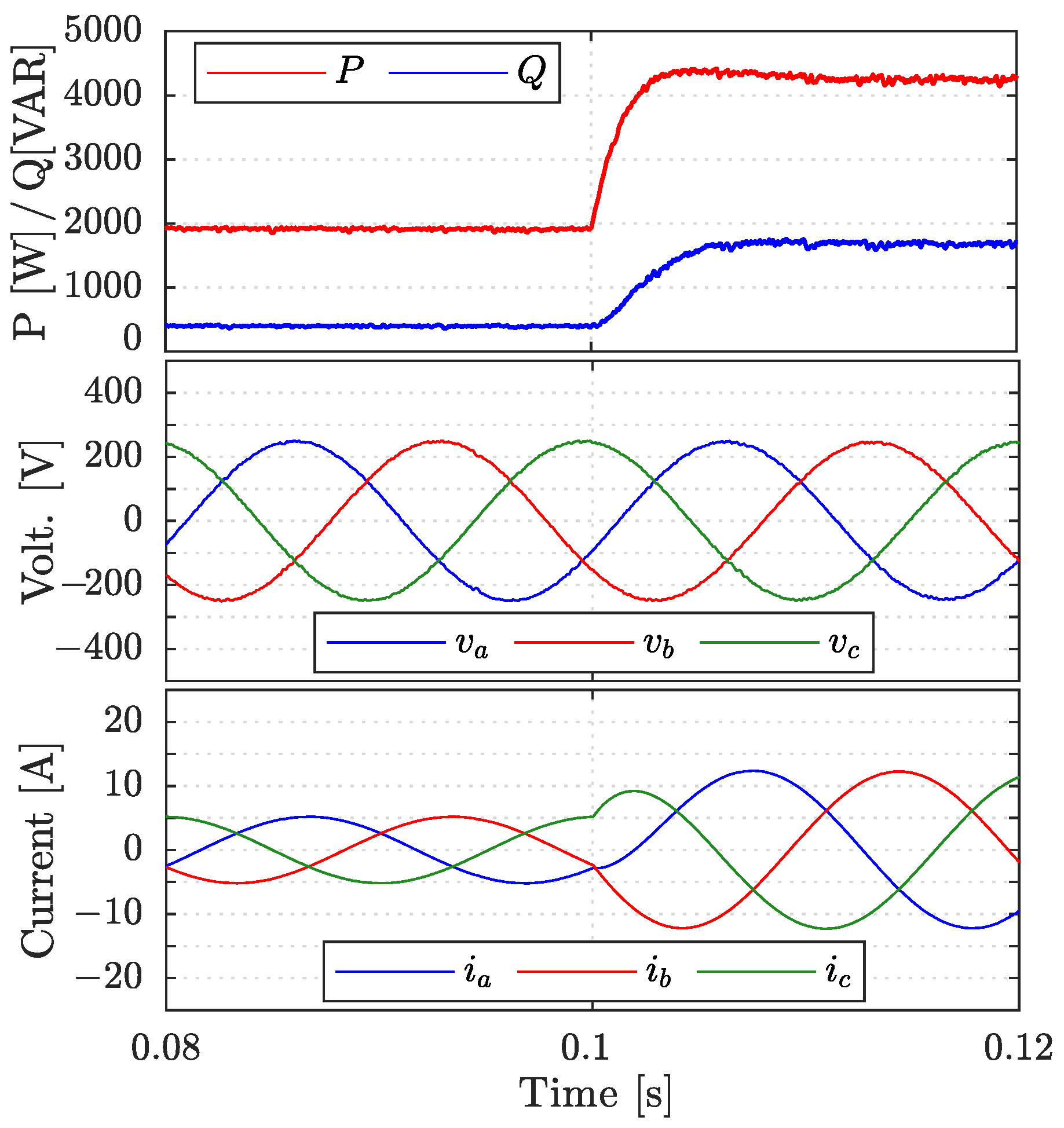
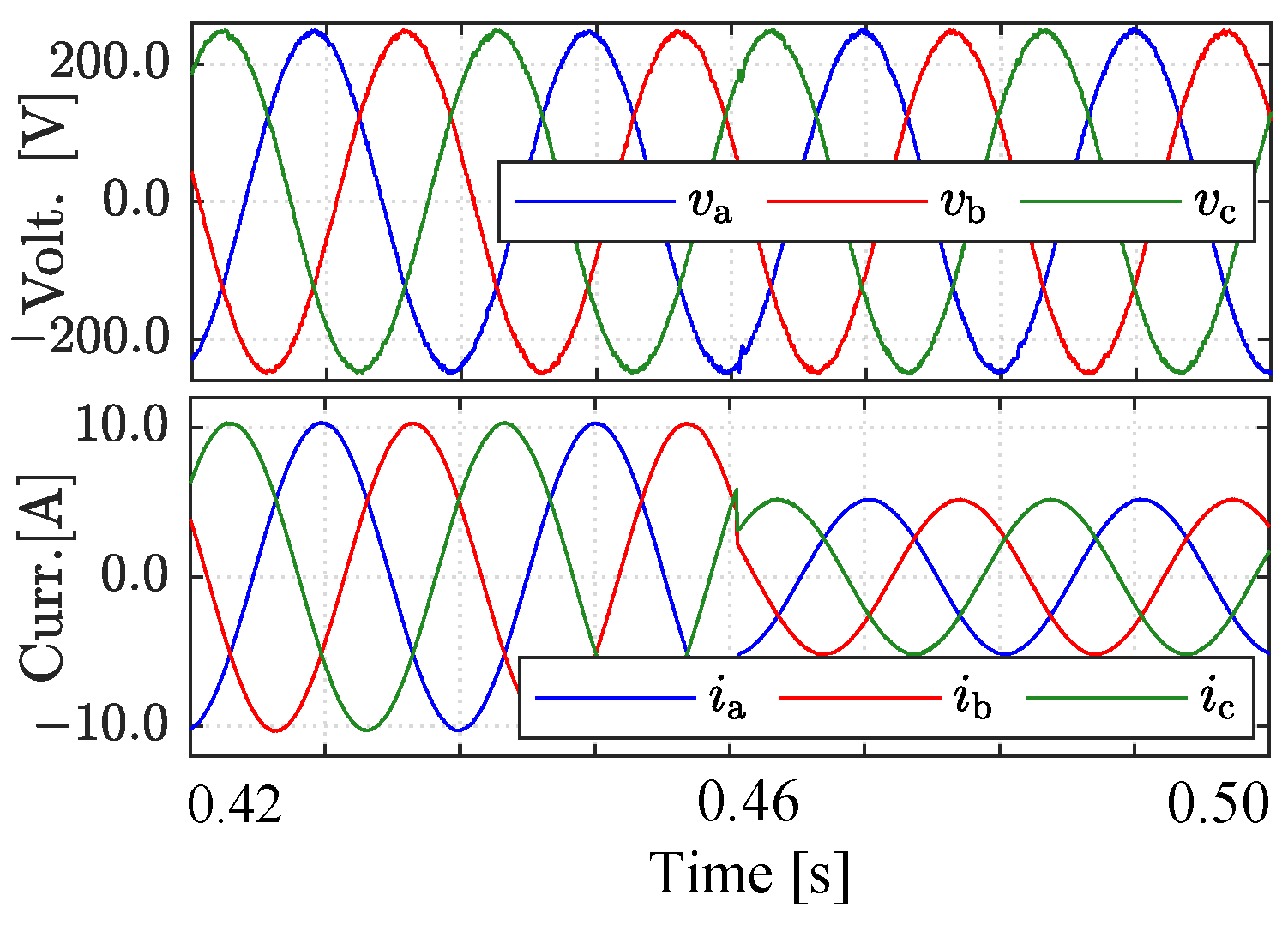
5.6.1. Transient Performance
5.6.2. Robustness to Model Parameter Variations
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Parameter Estimation and Update
Appendix A.1. Inductance Variation Estimation
Appendix A.2. Capacitance Variation Estimation
References
- Matevosyan, J.; Badrzadeh, B.; Prevost, T.; Quitmann, E.; Ramasubramanian, D.; Urdal, H.; Achilles, S.; MacDowell, J.; Huang, S.H.; Vital, V.; et al. Grid-Forming Inverters: Are They the Key for High Renewable Penetration? IEEE Power Energy Mag. 2019, 17, 89–98. [Google Scholar] [CrossRef]
- Babayomi, O.; Li, Z.; Zhang, Z. Distributed secondary frequency and voltage control of parallel-connected vscs in microgrids: A predictive VSG-based solution. CPSS Trans. Power Electron. Appl. 2020, 5, 342–351. [Google Scholar] [CrossRef]
- Young, H.A.; Perez, M.A.; Rodriguez, J. Analysis of Finite-Control-Set Model Predictive Current Control With Model Parameter Mismatch in a Three-Phase Inverter. IEEE Trans. Ind. Electron. 2016, 63, 3100–3107. [Google Scholar] [CrossRef]
- Yang, Y.; Tan, S.; Hui, S.Y.R. Adaptive Reference Model Predictive Control With Improved Performance for Voltage-Source Inverters. IEEE Trans. Control Syst. Technol. 2018, 26, 724–731. [Google Scholar] [CrossRef]
- Easley, M.; Fard, A.Y.; Fateh, F.; Shadmand, M.B.; Abu-Rub, H. Auto-Tuned Model Parameters in Predictive Control of Power Electronics Converters; IEEE: Baltimore, MD, USA, 2019; pp. 3703–3709. [Google Scholar] [CrossRef]
- Khalilzadeh, M.; Vaez-Zadeh, S.; Eslahi, M.S. Parameter-Free Predictive Control of IPM Motor Drives with Direct Selection of Optimum Inverter Voltage Vectors. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 327–334. [Google Scholar] [CrossRef]
- Lin, C.K.; Yu, J.t.; Lai, Y.S.; Yu, H.C. Improved Model-Free Predictive Current Control for Synchronous Reluctance Motor Drives. IEEE Trans. Ind. Electron. 2016, 63, 3942–3953. [Google Scholar] [CrossRef]
- Carlet, P.G.; Tinazzi, F.; Bolognani, S.; Zigliotto, M. An Effective Model-Free Predictive Current Control for Synchronous Reluctance Motor Drives. IEEE Trans. Ind. Appl. 2019, 55, 3781–3790. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Jin, J.; Huang, L. Model-Free Predictive Current Control of PMSM Drives Based on Extended State Observer Using Ultralocal Model. IEEE Trans. Ind. Electron. 2021, 68, 993–1003. [Google Scholar] [CrossRef]
- Rodriguez, J.; Heydari, R.; Rafiee, Z.; Young, H.A.; Flores-Bahamonde, F.; Shahparasti, M. Model-Free Predictive Current Control of a Voltage Source Inverter. IEEE Access 2020, 8, 211104–211114. [Google Scholar] [CrossRef]
- Aguilera, R.P.; Lezana, P.; Quevedo, D.E. Finite-Control-Set Model Predictive Control With Improved Steady-State Performance. IEEE Trans. Ind. Inform. 2013, 9, 658–667. [Google Scholar] [CrossRef]
- Xia, C.; Wang, M.; Song, Z.; Liu, T. Robust Model Predictive Current Control of Three-Phase Voltage Source PWM Rectifier With Online Disturbance Observation. IEEE Trans. Ind. Inform. 2012, 8, 459–471. [Google Scholar] [CrossRef]
- Martin, C.; Arahal, M.R.; Barrero, F.; Durin, M.J. Five-Phase Induction Motor Rotor Current Observer for Finite Control Set Model Predictive Control of Stator Current. IEEE Trans. Ind. Electron. 2016, 63, 4527–4538. [Google Scholar] [CrossRef]
- Turker, A.; Buyukkeles, U.; Bakan, A.F. A Robust Predictive Current Controller for PMSM Drives. IEEE Trans. Ind. Electron. 2016, 63, 3906–3914. [Google Scholar] [CrossRef]
- Chen, Z.; Qiu, J.; Jin, M. Adaptive finite-control-set model predictive current control for IPMSM drives with inductance variation. IET Electr. Power Appl. 2017, 11, 874–884. [Google Scholar] [CrossRef]
- Bechouche, A.; Abdeslam, D.O.; Seddiki, H.; Rahoui, A. Estimation of Equivalent Inductance and Resistance for Adaptive Control of Three-Phase PWM Rectifiers; IEEE: Florence, Italy, 2016; pp. 1336–1341. [Google Scholar] [CrossRef]
- Mehreganfar, M.; Saeedinia, M.H.; Davari, S.A.; Garcia, C.; Rodriguez, J. Sensorless Predictive Control of AFE Rectifier With Robust Adaptive Inductance Estimation. IEEE Trans. Ind. Inform. 2019, 15, 3420–3431. [Google Scholar] [CrossRef]
- Kwak, S.; Moon, U.C.; Park, J.C. Predictive-Control-Based Direct Power Control With an Adaptive Parameter Identification Technique for Improved AFE Performance. IEEE Trans. Power Electron. 2014, 29, 6178–6187. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiao, J.; Liu, J. Direct Power Control of PWM Rectifiers With Online Inductance Identification Under Unbalanced and Distorted Network Conditions. IEEE Trans. Power Electron. 2019, 34, 12524–12537. [Google Scholar] [CrossRef]
- Abdelrahem, M.; Hackl, C.M.; Kennel, R. Finite set model predictive control with on-line parameter estimation for active frond-end converters. Electr. Eng. 2018, 100, 1497–1507. [Google Scholar] [CrossRef]
- Huang, L.; Coulson, J.; Lygeros, J.; Dörfler, F. Data-Enabled Predictive Control for Grid-Connected Power Converters; IEEE: Nice, France, 2019; pp. 8130–8135. [Google Scholar] [CrossRef] [Green Version]
- Carlet, P.G.; Favato, A.; Bolognani, S.; Dorfler, F. Data-Driven Predictive Current Control for Synchronous Motor Drives; IEEE: Detroit, MI, USA, 2020; pp. 5148–5154. [Google Scholar] [CrossRef]
- Teiar, H.; Chaoui, H.; Sicard, P. Almost Parameter-Free Sensorless Control of PMSM; IEEE: Yokohama, Japan, 2015; pp. 004667–004671. [Google Scholar] [CrossRef]
- Akpolat, A.N.; Habibi, M.R.; Dursun, E.; Kuzucuoglu, A.E.; Yang, Y.; Dragicevic, T.; Blaabjerg, F. Sensorless Control of DC Microgrid Based on Artificial Intelligence. IEEE Trans. Energy Convers. 2020. [Google Scholar] [CrossRef]
- Dragicevic, T.; Vazquez, S.; Wheeler, P. Advanced Control Methods for Power Converters in DG Systems and Microgrids. IEEE Trans. Ind. Electron. 2020. [Google Scholar] [CrossRef]
- Babayomi, O.; Oluseyi, P.; Keku, G.; Ofodile, N.A. Neuro-Fuzzy Based Fault Detection Identification and Location in a Distribution Network; IEEE: Accra, Ghana, 2017; pp. 164–168. [Google Scholar] [CrossRef]
- Guo, L.; Hung, J.; Nelms, R. Evaluation of DSP-Based PID and Fuzzy Controllers for DC–DC Converters. IEEE Trans. Ind. Electron. 2009, 56, 2237–2248. [Google Scholar] [CrossRef]
- Saroha, J.; Singh, M.; Jain, D.K. ANFIS-Based Add-On Controller for Unbalance Voltage Compensation in a Low-Voltage Microgrid. IEEE Trans. Ind. Inform. 2018, 14, 5338–5345. [Google Scholar] [CrossRef]
- Jabr, H.M.; Lu, D.; Kar, N.C. Design and Implementation of Neuro-Fuzzy Vector Control for Wind-Driven Doubly-Fed Induction Generator. IEEE Trans. Sustain. Energy 2011, 2, 404–413. [Google Scholar] [CrossRef]
- Hou, S.; Chu, Y.; Fei, J. Robust Intelligent Control for a Class of Power-electronic Converters Using Neuro-Fuzzy Learning Mechanism. IEEE Trans. Power Electron. 2021. [Google Scholar] [CrossRef]
- Dragicevic, T. Model Predictive Control of Power Converters for Robust and Fast Operation of AC Microgrids. IEEE Trans. Power Electron. 2018, 33, 6304–6317. [Google Scholar] [CrossRef]
- Wang, J.S.; Lee, C. Self-adaptive neuro-fuzzy inference systems for classification applications. IEEE Trans. Fuzzy Syst. 2002, 10, 790–802. [Google Scholar] [CrossRef]
- Er, M.J.; Mandal, S. A Survey of Adaptive Fuzzy Controllers: Nonlinearities and Classifications. IEEE Trans. Fuzzy Syst. 2016, 24, 1095–1107. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbols | Values |
|---|---|---|
| DC voltage | 650 V | |
| Nominal frequency | 50 Hz | |
| Nominal voltage | 250 V | |
| Filter | mH, μF | |
| Sampling time | μs (Simulation) μs (HiL controller) μs (HiL plant discretization) | |
| Droop coefficients | , | μV/W, μrad/sVar |
| Line impedance | , | , mH |
| Virtual impedance | , | , mH |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Babayomi, O.; Zhang, Z.; Li, Y.; Kennel, R. Adaptive Predictive Control with Neuro-Fuzzy Parameter Estimation for Microgrid Grid-Forming Converters. Sustainability 2021, 13, 7038. https://doi.org/10.3390/su13137038
Babayomi O, Zhang Z, Li Y, Kennel R. Adaptive Predictive Control with Neuro-Fuzzy Parameter Estimation for Microgrid Grid-Forming Converters. Sustainability. 2021; 13(13):7038. https://doi.org/10.3390/su13137038
Chicago/Turabian StyleBabayomi, Oluleke, Zhenbin Zhang, Yu Li, and Ralph Kennel. 2021. "Adaptive Predictive Control with Neuro-Fuzzy Parameter Estimation for Microgrid Grid-Forming Converters" Sustainability 13, no. 13: 7038. https://doi.org/10.3390/su13137038
APA StyleBabayomi, O., Zhang, Z., Li, Y., & Kennel, R. (2021). Adaptive Predictive Control with Neuro-Fuzzy Parameter Estimation for Microgrid Grid-Forming Converters. Sustainability, 13(13), 7038. https://doi.org/10.3390/su13137038