Genetic Algorithm for Embodied Energy Optimisation of Steel-Concrete Composite Beams



Abstract
1. Introduction
2. Optimising Steel-Concrete Composite Structures
2.1. The Genetic Algorithm
- From input parameters, populations of candidate solutions are randomly generated;
- The performance of a candidate solution within the population are determined against defined fitness functions;
- Repetition; selection of pairs of parent solutions, random crossover to produce candidate solutions, and mutation of offspring solutions;
- Form a new population with these offspring solutions;
- Repeat this process until an optimal solution has been returned.
2.2. Aims of this Study
- Minimisation of the universal beam (UB) section—Objective function 1
- Minimisation of depth of the concrete slab (dslab)—Objective function 2
- Minimisation of overall weight of the composite beam—Objective function 3
- Maximisation of the span length of the composite beam—Objective function 4
- Minimisation of the deflection of the composite beam—Objective function 5
3. Methodology for Structural Design and Life Cycle Energy Assessment
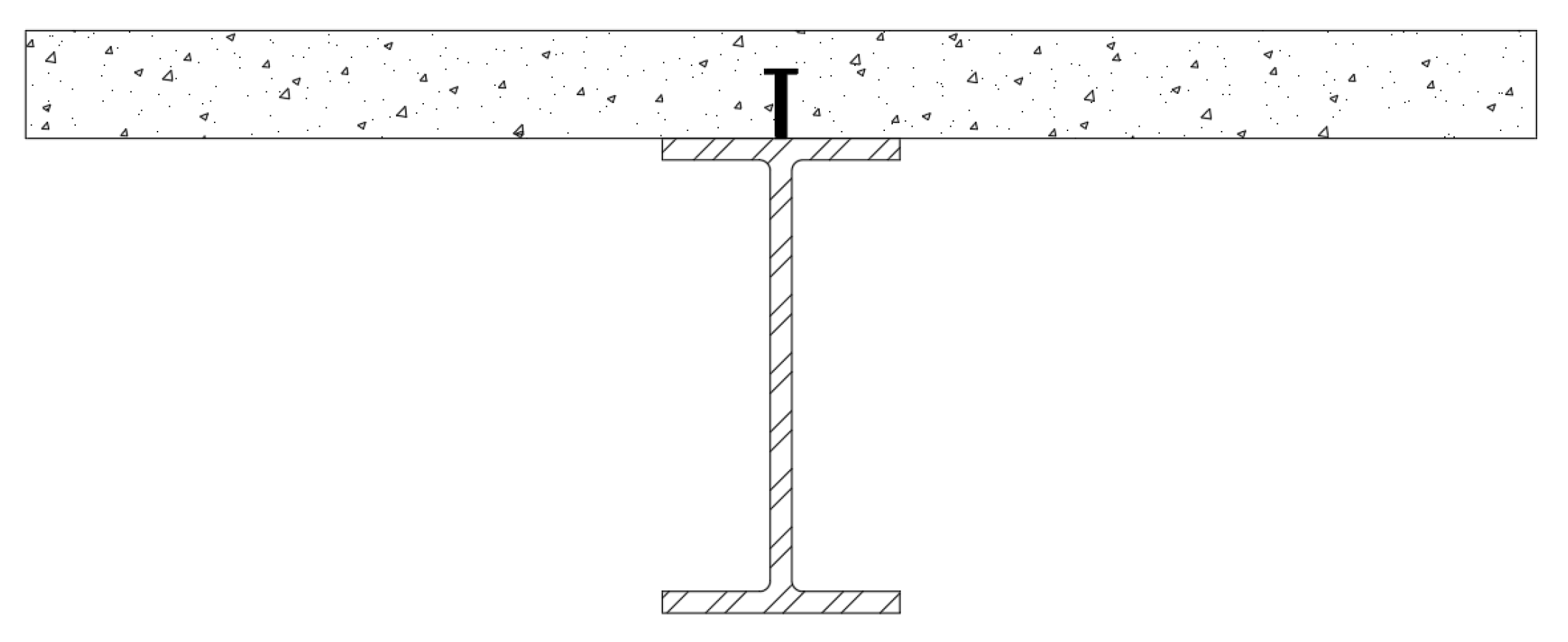
3.1. Structural Form
3.2. Actions upon the Structure
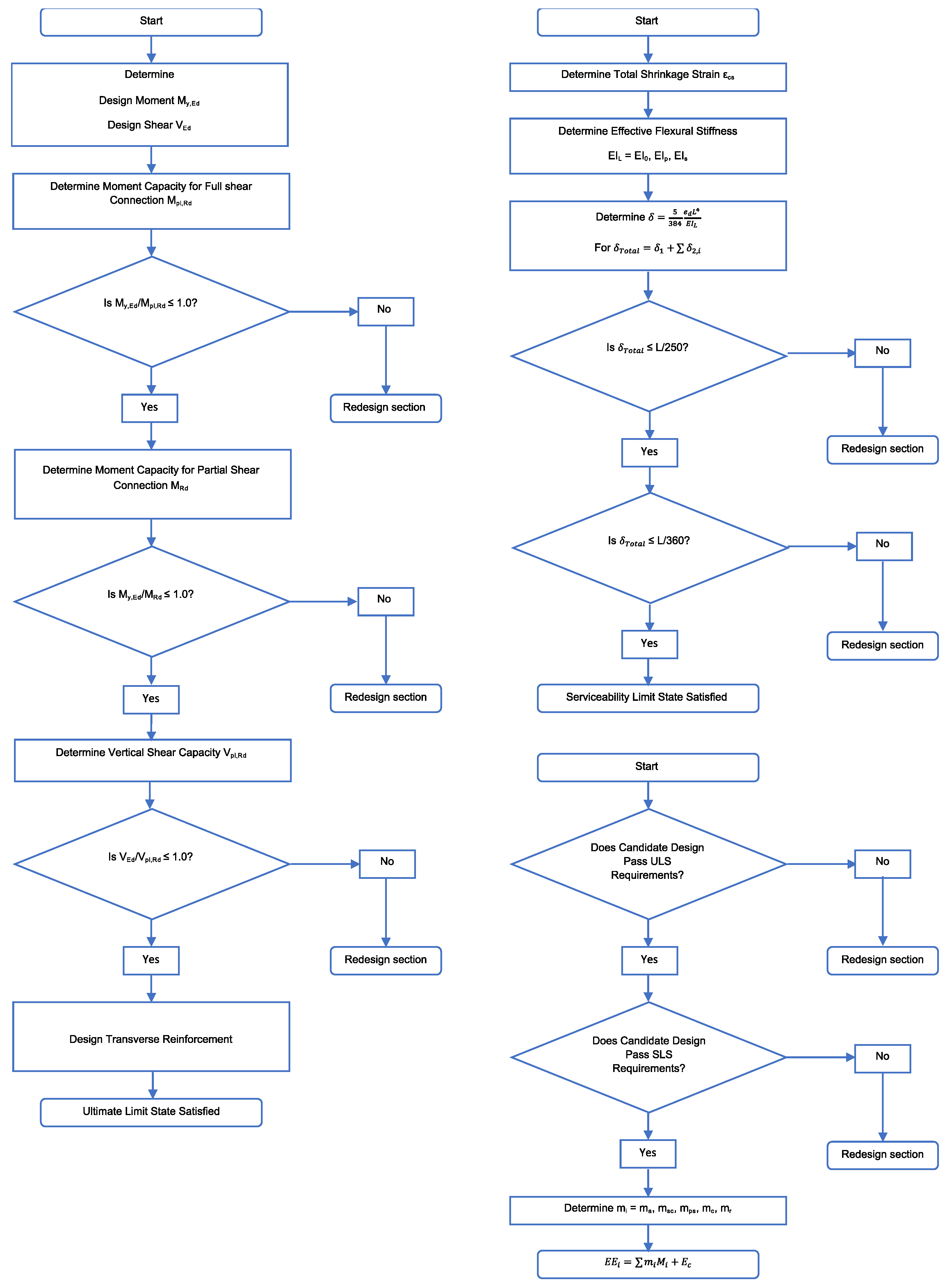
3.3. Ultimate Limit State Verification
3.4. Serviceability Limit State Verification
- At the construction stage, the beam alone is assumed to have insufficient resistance to lateral-torsional buckling and will be fully propped, thus for this scenario, there is no deflection of the beam.
- The beam is assumed to be an internal beam; therefore, relative humidity is assumed as 50%.
- It is assumed that the cement used for the slab is normal hardening, thus class = N.
3.5. Quantification of Embodied Energy
4. MATLAB Scripts for Optimisation
4.1. General MATLAB Script for Structural Design and Life Cycle Energy Assessment
4.2. Implementing MATLAB Global Optimisation Toolbox GA
| [x,fval] = ga(FitFcn,nvars,[],[],[],[],lb,ub,[],options); |
5. Optimisation of a Steel-Concrete Composite Beam
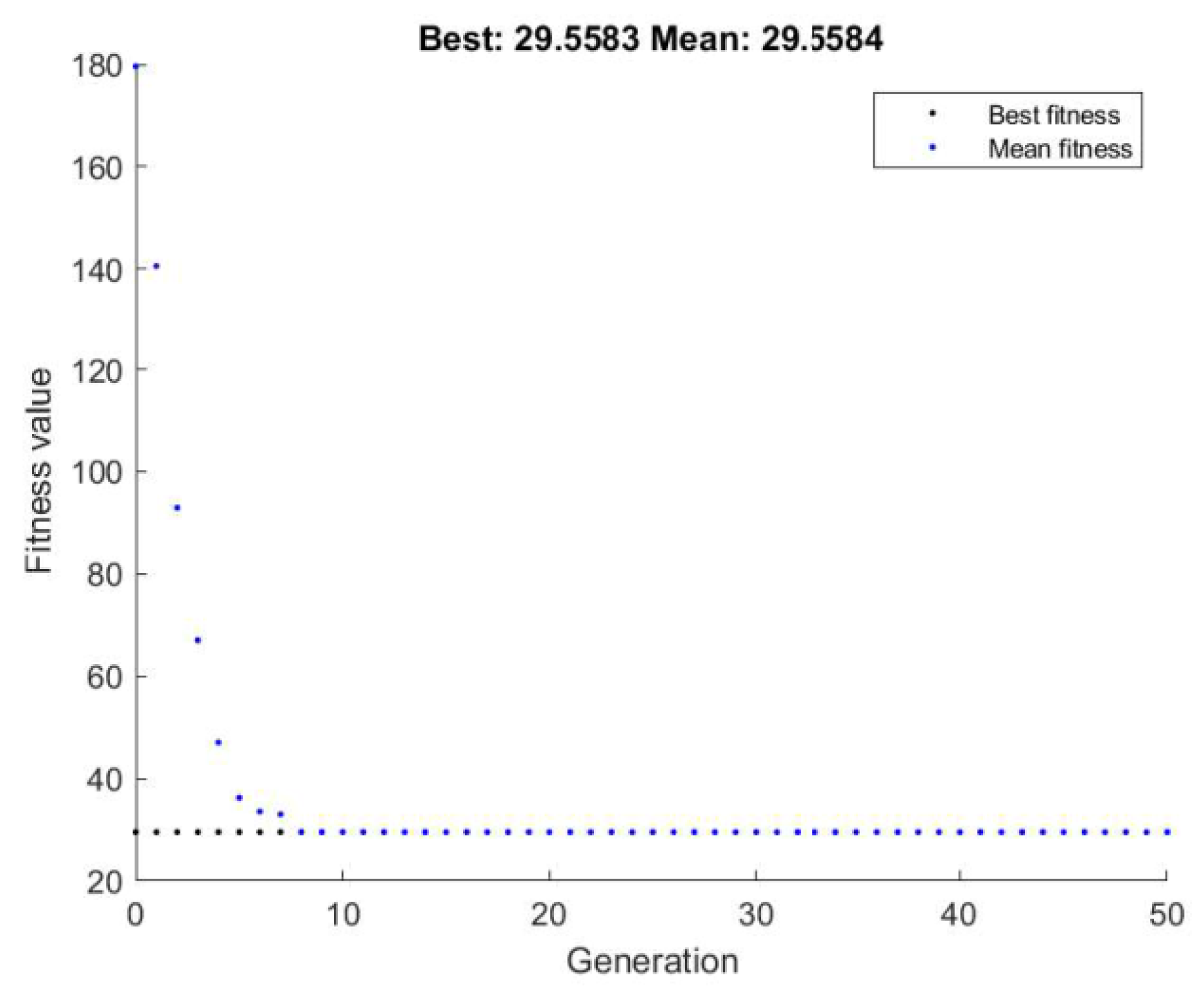
5.1. Minimisation of the Universal Beam Section—Objective Function 1
- A 305 × 102 × 25 universal beam with a span length of 6.0m, and bay spacing of 3.0m;
- A 130 mm deep C25/30 concrete slab cast upon;
| function ha = ha_function(x, Npla, dslab, NcSLAB, hc) ha = ((2*(x*10^3))/Npla)-(2*dslab)+((Npla*hc)/NcSLAB); end % %Genetic Algorithm Script for Objective Function 1 - Minimise Universal %Beam Section. % clc, clear, clear all % %Define Parameters hc = 70; dslab = 130; Npla = 987.25; NcSLAB = 1487.5 %Define GA Components FitFcn = @(x)ha_function(x,Npla,dslab,NcSLAB,hc); nvars = 1; lb = 120; ub = 257.79; options = optimoptions(‘ga’,’Generations’,50,... ‘MaxStallGenerations’,Inf,’PlotFcn’,@gaplotbestf); [x,fval] =ga(FitFcn,nvars,[],[],[],[],lb,ub,[],options); x fval |
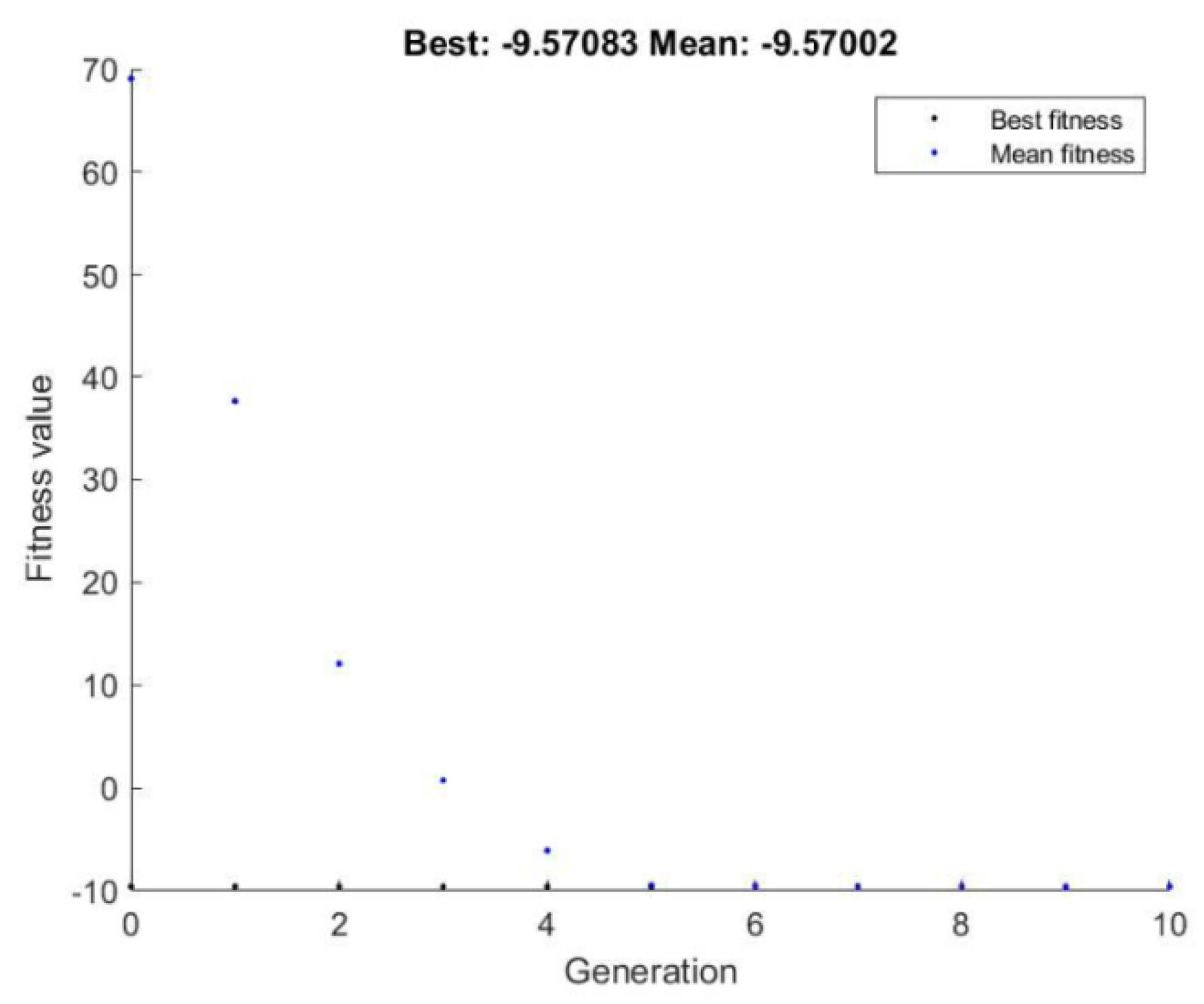
5.2. Minimisation of Depth of the Concrete Slab—Objective Function 2
| function dslab = dslab_function(x,Npla,NcSLAB,ha,hc) dslab=((x*10^3)/Npla)-(ha/2)+((Npla*hc)/(2*NcSLAB)); end %Genetic Algorithm Script for Objective Function 2 - Minimise depth of %concrete slab. % clc, clear, clear all % %Define Parameters hc = 70; ha = 308.7; Npla = 987.25; NcSLAB = 1487.5 %Define GA Components FitFcn = @(x)dslab_function(x,Npla,NcSLAB,ha,hc); nvars = 1; lb = 120; ub = 257.79; options = optimoptions(‘ga’,’Generations’,10,... ‘MaxStallGenerations’,Inf,’PlotFcn’,@gaplotbestf); [x,fval] =ga(FitFcn,nvars,[],[],[],[],lb,ub,[],options); x fval |
5.3. Minimisation of Overall Weight of the Composite Beam—Objective Function 3
5.4. Maximisation of the Span Length of the Composite Beam—Objective Function 4
5.5. Minimisation of the Deflection of the Composite Beam—Objective Function 5
6. Concluding Remarks
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| GA | Genetic Algorithm |
| UB | Universal Beam |
| ULS | Ultimate Limit State |
| SLS | Serviceability Limit State |
| MEd | Design Bending Moment |
| VEd | Design Shear Force |
| gk | Permanent Action |
| qk | Variable Action |
| γg | Partial Factor of Safety for Permanent Actions |
| γq | Partial Factor of Safety for Permanent Actions |
| γM0 | Partial Factor for Resistance–Structural Steel |
| γc | Partial Factor for Resistance–Concrete |
| γs | Partial Factor for Resistance–Reinforcing Steel |
| γv | Partial Factor for Resistance–Shear Connectors |
| Fd | Combined Actions |
| ha | Depth of Universal Beam |
| ba | Width of Universal Beam |
| d | Depth Between Fillets |
| tw | Web Thickness |
| tf | Flange Thickness |
| r | Radius of Root Fillet |
| Aa | Area of Universal Beam |
| Wpl,y | Universal Beam Plastic Modulus (y-y axis) |
| Iyy | Universal Beam Second Moment of Area (y-y axis) |
| Ia | Universal Beam Second Moment of Area (dominant axis) |
| L | Beam Span |
| S | Beam Spacing |
| dslab | Depth of Slab |
| hc | Height of Concrete Above Profile |
| hp | Height of Profiled Deck |
| b1 | Width of Bottom Trough |
| b2 | Width of Top Trough |
| Ø | Nominal Diameter of Shear Connector |
| hsc | Height of Shear Connector prior to Welding |
| Fy | Yield Strength of Structural Steel |
| Fu | Ultimate Strength of Structural Steel |
| Fyk | Yield Strength of Reinforcing Steel |
| Fck | Cylinder Strength of Concrete |
| Ecm | Secant Modulus of Elasticity |
| beff | Effective Width of the Compression Flange |
| Nc,slab | Compression Resistance of the Concrete Slab |
| Npla | Tensile Resistance of the Steel Section |
| Mpl,Rd | Moment Capacity for Full Shear Connection |
| PRd | Design Shear Resistance of a Single Shear Connector |
| kt | Deck Shape Influence Factor |
| Mpl,a,Rd | Plastic Moment Resistance of the Universal Beam |
| MRd | Moment Capacity for Partial Shear Connection |
| Vpl,Rd | Vertical Shear Resistance of the Composite Beam |
| Av | Area of Shear |
| Asf | Cross Sectional Area of Reinforcing Steel |
| Fyd | Yield Strength of Reinforcing Steel |
| εcs | Total Shrinkage Strain |
| εcd | Drying Shrinkage Strain |
| εca | Autogenous Shrinkage Strain |
| fcm(t) | Minimum Concrete Strength for Time (t) |
| RH | Relative Humidity |
| EL | Effective Modulus of Elasticity of Concrete |
| E0 | Short Term Effective Modulus of Elasticity of Concrete |
| Ep | Permanent Effective Modulus of Elasticity of Concrete |
| Es | Effective Modulus of Elasticity of Concrete for Shrinkage |
| Ic | Second Moment of Area of Concrete Flange |
| EIL | Effective Flexural Stiffness of Concrete Flange |
| EI0 | Short Term Effective Flexural Stiffness of Concrete Flange |
| EIp | Permanent Effective Flexural Stiffness of Concrete Flange |
| EIs | Effective Flexural Stiffness of Concrete Flange for Shrinkage |
| Φ(t,t0) | Creep Coefficient |
| δi | ith Deflection Component |
| δtotal | Total Deflection |
| ed | Combined Actions for Serviceability Limit State |
| ac | Distance Between Centroidal Axes of Concrete Flange and Universal Beam |
| EEi | Initial Embodied Energy Content of Steel-Concrete Composite Beam |
| EEtotal | Total Initial Embodied Energy Content of Steel-Concrete Composite Beam |
| EEa | Initial Embodied Energy Content of Universal Beam |
| EEsc | Initial Embodied Energy Content of Shear Connectors |
| EEps | Initial Embodied Energy Content of Profiled Deck |
| EEc | Initial Embodied Energy Content of Concrete Slab |
| EEr | Initial Embodied Energy Content of Reinforcing Steel |
| mi | Quantity of Material (i) |
| Mi | Cradle to Gate Embodied Energy Content for Material (i) |
| Ec | Embodied Energy Content for Construction Activities |
References
- Ahmed, I.; Tsavdaridis, K.D.; Neysari, F. A new breed of sustainable ultra-lightweight and ultra-shallow steel-concrete composite flflooring system: Life cycle assessment (LCA) of materials. In Proceedings of the International Conference Coordinating Engineering for Sustainability and Resilience (CESARE 2017), Dead Sea, Jordan, 3–8 May 2017; pp. 3–8. [Google Scholar]
- Ahmed, I.; Tsavdaridis, K.D.; Neysari, F. Push-out shear tests for a novel pre-fabricated shallow steel-concrete composite flflooring system. In Proceedings of the 12th International Conference on Advances in Steel-Concrete Composite Structures (ASCCS 2018), Valencia, Spain, 27–29 June 2018; pp. 27–29. [Google Scholar]
- Ahmed, I.; Tsavdaridis, K.D. Prefabricated Composite Flooring Systems with Normal and Lightweight Concretes. In Proceedings of the The 14th Nordic Steel Construction Conference (NSCC 2019), In Special Issue Proceedings of Nordic Steel, (DTU), Copenhagen, Denmark, 18–20 September 2019; Volume 3, pp. 257–263. [Google Scholar]
- Ahmed, I.M.; Tsavdaridis, K.D. Life Cycle Assessment (LCA) Study of European Lightweight Composite Flooring Systems. J. Build. Eng. 2018, 20, 624–633. [Google Scholar] [CrossRef]
- Ahmed, I.M.; Tsavdaridis, K.D. The Evolution of Composite Flooring Systems: Applications, Testing, Modelling and Eurocode Design Approaches. J. Constr. Steel Res. 2019, 155, 286–300. [Google Scholar] [CrossRef]
- Tsavdaridis, K.D.; D’Mello, C. Finite Element Investigation of Perforated Beams with Different Web Opening Configurations. In Proceedings of the The 6th International Conference on Advances is Steel Structures (ICASS 2009), Hong Kong, China, 16–18 December 2009; pp. 213–220. [Google Scholar]
- Tsavdaridis, K.D.; D’Mello, C.; Hawes, M. Experimental Study of Ultra Shallow Floor Beams (USFB) with Perforated Steel Sections. In Proceedings of the The 11th Nordic Steel Construction Conference 2009 (NSCC 2009), Malmö, Sweden, 2–4 September 2009; Volume 128, pp. 312–319. [Google Scholar]
- Tsavdaridis, K.D.; D’Mello, C.; Huo, B.Y. Experimental and Computational Study of Vertical Shear Behaviour of Partially Encased Perforated Steel Beams. Eng. Struct. 2013, 56, 805–822. [Google Scholar] [CrossRef]
- Tsavdaridis, K.D.; Galiatsatos, G. Assessment of Cellular Beams with Transverse Stiffeners and Closely Spaced Web Openings. Thin Walled Struct. 2015, 94, 636–650. [Google Scholar] [CrossRef]
- Demetriou, D.; Nikitas, N.; Tsavdaridis, K.D. Performance of Fixed-Parameter Control Algorithms on High-Rise Structures Equipped with Semi-Active Tuned Mass Dampers. Struct. Des. Tall Spec. Build. 2015, 25, 340–354. [Google Scholar] [CrossRef]
- Demetriou, D.; Nikitas, N.; Tsavdaridis, K.D. Semi Active Tuned Mass Dampers of Buildings: A Simple Control Option. Am. J. Eng. Appl. Sci. Spec. Issue Struct. Eng. 2015, 8, 620–632. [Google Scholar] [CrossRef]
- Tsavdaridis, K.D.; D’Mello, C. Optimisation of Novel Elliptically-Based Web Opening Shapes of Perforated Steel Beams. J. Constr. Steel Res. 2012, 76, 39–53. [Google Scholar] [CrossRef]
- Tsavdaridis, K.D.; Kingman, J.J.; Toropov, V.V. Application of Structural Topology Optimisation to Perforated Steel Beams. Comput. Struct. 2015, 158, 108–123. [Google Scholar] [CrossRef]
- Kingman, J.J.; Tsavdaridis, K.D.; Toropov, V.V. Applications of Topology Optimisation in Structural Engineering: High-rise Buildings & Steel Components. Jordan J. Civ. Eng. 2015, 9, 335–357. [Google Scholar]
- Hawdon-Earl, S.; Tsavdaridis, K.D. Form Finding and Dimensioning of Reinforced Concrete Shell Roof for Akrotiri (Santorini). J. Int. Assoc. Shell Spat. Struct. (IASS) 2018, 59, 198. [Google Scholar]
- Fraser, A.S. Simulation of Genetic Systems by Automatic Digital Computers. Aust. J. Biol. Sci. 1957, 10, 484–491. [Google Scholar] [CrossRef]
- Panchal, D.R. Steel-Concrete Composite Beam Design Using Genetic Algorithms. Int. J. Innov. Res. Dev. 2014, 3, 473–480. [Google Scholar]
- Alanka, K.; Chaudhary, S. Cost Optimisation of Composite Beams using Genetic Algorithm and Artificial Neural Network. In Proceedings of the 2012 International Conference on Computer Technology and Science (ICCTS), New Delhi, India, 18–19 August 2012. [Google Scholar]
- Senouci, A.B.; Al-Ansari, M.S. Cost Optimisation of Composite Beams using Genetic Algorithms. In Advances in Engineering Software; Elsevier: Amsterdam, The Netherlands, 2009; Volume 40, pp. 1112–1118. [Google Scholar]
- Artar, M.; Daloglu, A.T. Optimum Design of Composite Steel Frames with Semi-Rigid Connections and Column Bases via Genetic Algorithm. Steel Compos. Struct. 2015, 19, 1035–1053. [Google Scholar] [CrossRef]
- Eleftheriadis, S.; Dunant, C.F.; Drewniok, M.P.; Rogers-Tizard, W. A Computational Paradigm for the Optimisation of Steel Building Structures Based on Cost and Carbon Indexes in Early Design Stages. In Proceedings of the 24th International Workshop on Intelligent Computing in Engineering (EG-ICE-2017), University of Nottingham, Nottingham, UK, 10–12 July 2017. [Google Scholar]
- Eleftheriadis, S.; Dunant, C.F.; Drewniok, M.P.; Rogers-Tizard, W.; Kyprianou, C. Comparative Numerical Analysis for Cost and Embodied Carbon Optimisation of Steel Building Structures. Adv. Comput. Des. 2018, 3, 385–404. [Google Scholar]
- MathWorks. Global Optimisation Toolbox Version R2019A.S.I:S.N; 2019. [Google Scholar]
- CEN. European Committee for Standardisation. In Eurocode 4: Design of Steel and Concrete Composite Structures Part 1-1: General Rules and Rules for Buildings; CEN: Brussels, Belgium, 2005. [Google Scholar]
- Mitchell, M. An Introduction to Genetic Algorithms; First MIT paperback, Ed.; Massachusetts Institute of Technology: Cambridge, MA, USA, 1996. [Google Scholar]
- CEN European Committee for Standardisation. Eurocode 1 Actions on Structures-Part 1-1: General Actions-Densities, Self-Weight, Imposed Loads for Buildings; European Committee for Standardisation: Brussels, Belgium, 2002. [Google Scholar]
- CEN European Committee for Standardisation. Eurocode: Basis of Structural Design; European Committee for Standardisation: Brussels, Belgium, 2002. [Google Scholar]
- British Standards Institute. UK National Annex to Eurocode 1. Actions on Structures. In General Actions-Densities, Self-Weight, Imposed Loads for Buildings; British Standards Institute: London, UK, 2005. [Google Scholar]
- CEN. European Committee for Standardisation. In Eurocode 3: Design of Steel Structures-Part 1-1: General Rules and Rules for Buildings; CEN: Brussels, Belgium, 2006. [Google Scholar]
- CEN. European Committee for Standardisation. In Eurocode 2: Design of Concrete Structures-Part 1-1: General Rules and Rules for Buildings; CEN: Brussels, Belgium, 2004. [Google Scholar]
- Heaton Products LTD. 2019. Reinforcement Mesh. Available online: https://www.heatonproducts.co.uk/products/reinforcement-mesh/ (accessed on 27 April 2019).
- Ramesh, T.; Prakesh, R.; Shukla, K.K. Life cycle Energy Analysis of Buildings: An Overview. Elsevier. Energy Build. 2010, 42, 1592–1600. [Google Scholar] [CrossRef]
- Hammond, G.P.; Jones, C.I. Inventory of Carbon and Energy (ICE); University of Bath: Bath, UK, 2008. [Google Scholar]
- Tata Steel. ComFlor® Manual Composite Floor Decking Design and Technical Manual; Tata Steel UK Limited: London, UK, 2017. [Google Scholar]
- SMD. Best Practice Data Sheet DATA/11 SMD Shear Studs SMD.DAT.152.V4; SMD Stockyards Limited; Available online: http://smdltd.co.uk/wp-content/uploads/2016/06/SMD.DAT_.152.V4-Best-Practice-Data-Sheet-DATA.11-SMD-Shear-Studs.pdf (accessed on 12 April 2020).
- Steel Construction Info. Universal Beams Interactive ‘Blue Book’. Available online: https://www.steelforlifebluebook.co.uk/ub/ec3-ukna/section-properties-dimensions-properties/ (accessed on 1 May 2019).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Objective Function | UB Section | Slab Depth (mm) | Span (m) | EEa (MJ) | EEsc (MJ) | EEps (MJ) | EEc (MJ) | EEr (MJ) | EEtotal (MJ) |
|---|---|---|---|---|---|---|---|---|---|
| Initial Candidate Design | 305 × 102 × 28 | 130 | 6.0 | 6226.6 | 293.0 | 8143.0 | 4795.2 | 4035.8 | 23,493.6 |
| Minimised Universal Beam Section | 203 × 102 × 23 | 130 | 6.0 | 5100.5 | 293.0 | 8143.0 | 4795.2 | 4035.8 | 22,367.5 |
| Minimised Depth of Concrete Slab | 305 × 102 × 28 | 110 | 6.0 | 6226.6 | 293.0 | 8143.0 | 3836.2 | 4035.8 | 22,534.6 |
| Minimised Weight | 203 × 102 × 23 | 110 | 6.0 | 5100.5 | 293.0 | 8143.0 | 3836.2 | 4035.8 | 21,408.5 |
| Maximised Span Length | 254 × 102 × 28 | 110 | 7.823 | 8147.2 | 383.9 | 10617.0 | 5001.7 | 5262.1 | 29,410.9 |
| Minimised Deflection | 203 × 133 × 25 | 110 | 6.0 | 5542.1 | 293.0 | 8143.0 | 3836.2 | 4035.8 | 21,849.2 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Whitworth, A.H.; Tsavdaridis, K.D. Genetic Algorithm for Embodied Energy Optimisation of Steel-Concrete Composite Beams. Sustainability 2020, 12, 3102. https://doi.org/10.3390/su12083102
Whitworth AH, Tsavdaridis KD. Genetic Algorithm for Embodied Energy Optimisation of Steel-Concrete Composite Beams. Sustainability. 2020; 12(8):3102. https://doi.org/10.3390/su12083102
Chicago/Turabian StyleWhitworth, Alex H., and Konstantinos Daniel Tsavdaridis. 2020. "Genetic Algorithm for Embodied Energy Optimisation of Steel-Concrete Composite Beams" Sustainability 12, no. 8: 3102. https://doi.org/10.3390/su12083102
APA StyleWhitworth, A. H., & Tsavdaridis, K. D. (2020). Genetic Algorithm for Embodied Energy Optimisation of Steel-Concrete Composite Beams. Sustainability, 12(8), 3102. https://doi.org/10.3390/su12083102