Pedestrian–Vehicle Interaction at Unsignalized Crosswalks: A Systematic Review




Abstract
1. Introduction
1.1. Rationale
1.2. Objetive
2. Methods
2.1. Protocol
2.2. Elegibility Criteria
2.2.1. Inclusion Criteria
- Studies published in the English language;
- Publications time from 2012 to 2019;
- Studies that have as primary or secondary objective, the analysis of the interaction between pedestrians and vehicles in intersections, roundabouts or mid-block crossings;
- Studies that analyze pedestrian-vehicle interaction in a microscopic environment.
2.2.2. Exclusion Criteria
- Studies that carry out the analysis of the PVI at the zebra-crossing with traffic lights or outside the pedestrian crossings;
- Studies that analyze the PVI focusing specifically in groups of pedestrian crossing;
- Studies focused on modelling gap acceptance and/or other variables used to modelling the pedestrian behavior;
- Studies that analyze PVI as a traffic conflict;
- Studies that analyze the interaction pedestrian-pedestrian and pedestrian-other user (e.g., cyclists, and two-wheeled personal mobility vehicles).
2.3. Information Sources and Search
2.4. Study Selection
2.5. Data Collection Process and Data Items
2.6. Risk of Bias in Individual Studies
3. Results
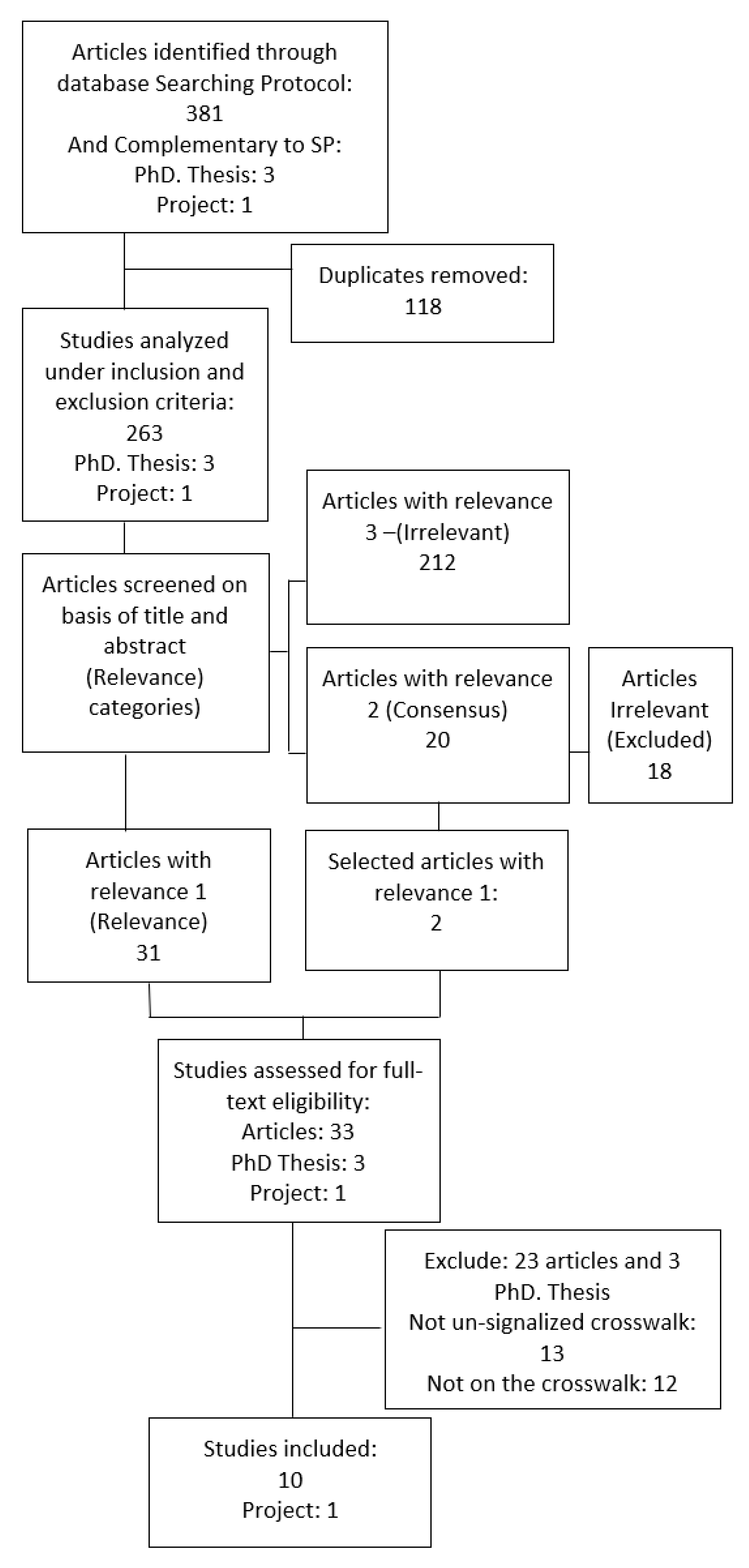
3.1. Study Selection
3.2. Characteristics of Studies
3.2.1. Data Collection for PVI
3.2.2. Pedestrian Model in PVI
3.2.3. Vehicular Model in PVI
3.2.4. Driver Yielding Behavior Model
3.2.5. Summary of the Characteristics of Studies
3.3. Risk of Bias within Studies
3.4. Main Outputs from Studies
3.4.1. Results of Pedestrian-Vehicle Interaction
3.4.2. Results of Driver Yielding Models
3.4.3. Summary of Results of Studies
4. Discussion
5. Conclusions
- (1)
- Each study used distinct data, variables, and techniques, which difficult the use of a common approach and, thus, a reliable comparison of the results that would allow to identify clearly the risk factors associated to PVI and, therefore, common policies to be implemented.
- (2)
- In general, the heterogeneity of the pedestrians, drivers, vehicles, and road environment is not clearly considered in the modelling process. Age and sex of pedestrians and drivers are the main common variables used to assume distinct behaviors on the PVI.
- (3)
- Although studies exist focusing on driver and pedestrian decision-making process, it is not clear how the findings of these particular studies are considered in the micro-simulation process.
Author Contributions
Funding
Conflicts of Interest
References
- World Health Organization. Global Status Report on Road Safety 2018; World Health Organization: Geneva, Switzerland, 2018. [Google Scholar]
- Schroeder, B.; Rouphail, N.; Salamati, K.; Hunter, E.; Phillips, B.; Elefteriadou, L.; Chase, T.; Zheng, Y.; Sisiopiku, V.; Mamidipalli, S. Empirically-based performance assessment and simulation of pedestrian behavior at unsignalized crossings. Southeastern Transportation Research, Innovation, Development and Education Center (STRIDE). 2014. Available online: https://stride.ce.ufl.edu/wp-content/uploads/2017/03/Schroeder-STRIDE-2012-016S-Final-Report.pdf (accessed on 30 March 2020).
- Peden, M.; Scurfield, R.; Sleet, D.; Mohan, D. Informe Mundial Sobre Prevención De Los Traumatismos Causados Por El Tránsito; Organización Mundial de la Salud: Washington, DC, USA, 2004. [Google Scholar]
- Lu, L.; Ren, G.; Wang, W.; Chan, C.; Wang, J. A cellular automaton simulation model for pedestrian and vehicle interaction behaviors at unsignalized mid-block crosswalks. Accid. Anal. Prev. 2016, 95, 425–437. [Google Scholar] [CrossRef] [PubMed]
- Fu, T.; Miranda-Moreno, L.; Saunier, N. A novel framework to evaluate pedestrian safety at non-signalized locations. Accid. Anal. Prev. 2018, 111, 23–33. [Google Scholar] [CrossRef] [PubMed]
- David, N.K. The role of the physical environment in child pedestrian accidents. J. Adv. Transp. 1994, 28, 171–187. [Google Scholar] [CrossRef]
- Lloyd, D.; Wilson, D.; Mais, D.; Deda, W.; Bhagat, A. Reported Road Casualties Great Britain: 2014 Annual Report; Department for Transport: London, UK, 2015.
- I. Nazionale Di Statistica, Road Accidents in Italy. Available online: https://www4.istat.it/en/archive/203775 (accessed on 8 November 2019).
- Zegeer, C.V.; Richard Stewart, J.; Huang, H.; Lagerwey, P. Safety effects of marked versus unmarked crosswalks at uncontrolled locations: Analysis of pedestrian crashes in 30 cities. Transp. Res. Rec. 2001, 1773, 56–68. [Google Scholar] [CrossRef]
- Pfortmueller, C.A.; Marti, M.; Kunz, M.; Lindner, G.; Exadaktylos, A.K. Injury severity and mortality of adult zebra crosswalk and non-zebra crosswalk road crossing accidents: A cross-sectional analysis. PLoS ONE 2014, 9, e90835. [Google Scholar] [CrossRef] [PubMed]
- Fitzpatrick, K.; Turner, S.; Brewer, M.A. Improving pedestrian safety at unsignalized intersections. Inst. Transp. Eng. ITE J. 2007, 77, 34. [Google Scholar]
- Golakiya, H.M.; Patkar, M.; Dhamaniya, A. Impact of Midblock Pedestrian Crossing on Speed Characteristics and Capacity of Urban Arterials. Arab. J. Sci. Eng. 2019, 44, 8675–8689. [Google Scholar]
- Feliciani, C.; Crociani, L.; Gorrini, A.; Vizzari, G.; Bandini, S.; Nishinari, K. A simulation model for non-signalized pedestrian crosswalks based on evidence from on field observation. Intell. Artif. 2017, 11, 117–138. [Google Scholar] [CrossRef]
- Salamati, K.; Schroeder, B.; Geruschat, D.R.; Rouphail, N. Event-based modeling of driver yielding behavior to pedestrians at two-lane roundabout approaches. Transp. Res. Rec. 2013, 2389, 1–11. [Google Scholar] [CrossRef]
- Suh, D.; Ukkusuri, S.; Benekohal, R.; Waller, S. Modeling pedestrian crossing activities in an urban environment using microscopic traffic simulation. Transp. Res. Rec. 2013, 89, 213–224. [Google Scholar] [CrossRef]
- Mamidipalli, S.V.; Sisiopiku, V.P.; Schroeder, B.J.; Elefteriadou, L.; Salamati, K.; Rouphail, N. Probit-based pedestrian gap acceptance model for midblock crossing locations. Transp. Res. Rec. 2015, 2519, 128–136. [Google Scholar] [CrossRef]
- Sun, D.; Ukkusuri, S.; Benekohal, R.; Waller, S. Modeling of Motorist-Pedestrian Interaction at Uncontrolled Mid-Block Crosswalks; Transportation Research Record: Washington, DC, USA, 2003. [Google Scholar]
- Schroeder, B.J.; Rouphail, N.M. Event-based modeling of driver yielding behavior at unsignalized crosswalks. J. Transp. Eng. 2010, 137, 455–465. [Google Scholar] [CrossRef]
- Schneider, R.J.; Sanatizadeh, A.; Shaon, M.; He, Z.; Qin, X. Exploratory analysis of driver yielding at low-speed, uncontrolled crosswalks in Milwaukee, Wisconsin. Transp. Res. Rec. 2018, 2672, 21–32. [Google Scholar] [CrossRef]
- Liu, M.; Zeng, W.; Chen, P.; Wu, X. A microscopic simulation model for pedestrian-pedestrian and pedestrian-vehicle interactions at crosswalks. PLoS ONE 2017, 12, e0180992. [Google Scholar]
- Wang, T.; Wu, J.; McDonald, M. A micro-simulation model of pedestrian-vehicle interaction behavior at unsignalized mid-block locations. In Proceedings of the 15th International IEEE Conference on Intelligent Transportation Systems, Anchorage, AK, USA, 16–19 September 2012; pp. 1827–1833. [Google Scholar]
- Papadimitriou, E.; Yannis, G.; Golias, J. A critical assessment of pedestrian behaviour models. Transp. Res. Part F Traffic Psychol. Behav. 2009, 12, 242–255. [Google Scholar] [CrossRef]
- Moher, D.; Liberati, A.; Tetzlaff, J.; Altman, D.G.; Group, P. Preferred Reporting Items for Systematic Reviews and Meta-Analyses: The PRISMA Statement. Ann. Intern. Med. 2009, 151, 264–269. [Google Scholar] [CrossRef]
- Liberati, A.; Altman, D.; Tetzlaff, J.; Mulrow, C.; Gotzche, P.; Ioannidis, J.; Clarke, M.; Devereaux, P.; Kleijnen, J. The PRISMA statement for reporting systematic reviews and meta-analyses of studies that evaluate health care interventions: Explanation and elaboration. PLoS Med. 2009, 6, e1000100. [Google Scholar] [CrossRef]
- Saunier, N.; Sayed, T.; Ismail, K. Large-scale automated analysis of vehicle interactions and collisions. Transp. Res. Rec. 2010, 2147, 42–50. [Google Scholar] [CrossRef]
- Bobermin, M.P.; Silva, M.M.; Ferreira, S.; Guedes, J.C.; Baptista, J.S. Driving simulator for evaluating the effects of road geometric design on driver behavior. Int. J. Occup. Environ. Saf. 2019, 3, 46–51. [Google Scholar] [CrossRef]
- Nunez, A. Sources of Errors and Biases in Traffic Forecasts for Toll Road Concessions. Ph.D. Thesis, Economics and Finance. Université Lumière-Lyon II, Lyon, France, 2007. [Google Scholar]
- Jang, S.; Rasouli, S.; Timmermans, H.J. Bias and sources of error in discrete choice models: A critical reflection. In Proceedings of the 13th International Conference on Design and Decision Support Systems in Architecture and Urban Planning, DDSS 2016, Eindhoven, The Netherlands, 27–28 June 2016; pp. 1–28. [Google Scholar]
- U.D. of H.&H. Services. National Heart, Lung, and Blood Institute: Study Quality Assessment Tools, 2019. Available online: https://www.nhlbi.nih.gov/health-topics/study-quality-assessment-tools. (accessed on 1 June 2019).
- Ottomanelli, M.; Iannucci, G.; Sassanelli, D. Simplified Model for Pedestrian–Vehicle Interactions at Road Crossings Based on Discrete Events System. Transp. Res. Rec. 2012, 2316, 58–68. [Google Scholar] [CrossRef]
- Chen, P.; Wu, C.; Zhu, S. Interaction between vehicles and pedestrians at uncontrolled mid-block crosswalks. Saf. Sci. 2016, 82, 68–76. [Google Scholar] [CrossRef]
- Blue, V.J.; Adler, J.L. Cellular automata microsimulation for modeling bi-directional pedestrian walkways. Transp. Res. Part B Methodol. 2001, 35, 293–312. [Google Scholar] [CrossRef]
- Ren, G.; Lu, L.; Wang, W.; Gong, X.; Huang, Z. Microscopic simulation model for pedestrian flow at signalized crosswalks. Transp. Res. Rec. 2014, 2434, 113–122. [Google Scholar] [CrossRef]
- Wu, W.; Chen, R.; Jia, H. Game theory modeling for vehicle-pedestrian interactions and simulation based on cellular automata. Int. J. Mod. Phys. 2019, 30, 1–21. [Google Scholar] [CrossRef]
- Xie, D.; Gao, Z.; Zhao, Z.; Wang, D.Z. Cellular automaton modeling of the interaction between vehicles and pedestrians at signalized crosswalk. J. Transp. Eng. 2012, 138, 1442–1452. [Google Scholar] [CrossRef]
- Zheng, Y.; Chase, R.T.; Elefteriadou, L.; Sisiopiku, V.; Schroeder, B. Driver types and their behaviors within a high level of pedestrian activity environment. Transp. Lett. 2017, 9, 1–11. [Google Scholar] [CrossRef]
- Van Houten, R.; Malenfant, J.E.; Blomberg, R.; Huitema, B.; Hochmuth, J. High-Visibility Enforcement on Driver Compliance with Pedestrian Right-of-Way Laws: 4-Year Follow-Up. Transp. Res. Rec. 2017, 2660, 58–65. [Google Scholar] [CrossRef]
- Schneider, R.; Qin, X.; Rahman, M.; Sanatizadeh, A.; He, Z.; Wykhuis, P. Evaluation of Driver Yielding to Pedestrians at Uncontrolled Crosswalks; University of Wisconsin-Madison Traffic Operations and Safety (TOPS) Laboratory: Madison, WI, USA, 2017. [Google Scholar]
- Fricker, J.D.; Zhang, Y. Modeling pedestrian and motorist interaction at semi-controlled crosswalks: The effects of a change from one-way to two-way street operation. Transp. Res. Rec. 2019, 2673, 433–446. [Google Scholar] [CrossRef]


{kind=link}
| Criteria | (Ottomanelli et al., 2012) | (Sun et al., 2003) | (Schroeder et al., 2014) | (Ottomanelli et al., 2012) | (Chen et al., 2016) | (Feliciani et al., 2017) | (Wu et al., 2019) | (Lu et al., 2016) | (Schroeder et al., 2010) | (Schneider et al., 2018) | (Salamati et al., 2013) | (Fricker and Zhang, 2019) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Was the question or objective of this investigation correctly indicated in the analysis? | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y |
| Does the sample of analysis data represent the target population? | NA | NA | Y | NA | NA | Y | NA | NA | Y | Y | Y | Y |
| Was the data collection methodology adequate for the technique used? | N | Y | Y | N | Y | Y | Y | Y | Y | Y | Y | Y |
| Was a clear description of the method used to analyze pedestrian behavior made? | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y |
| Was a clear description the method used to analyze the driver’s behavior? | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y |
| Was an appropriate description of the used methodology to the analysis of the interaction between pedestrian and vehicle? | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y |
| Did the authors use variables or parameters from other works to develop the model? | Y | N | N | Y | N | Y | Y | N | N | N | N | N |
| Did the authors inform about presumptions that can modify the model’s results? | Y | NA | Y | Y | Y | Y | Y | NR | Y | Y | Y | Y |
| Was it taken into account the heterogeneity of the pedestrians and their attributes? | N | Y | Y | N | NR | Y | NR | N | Y | Y | Y | Y |
| Was considerate the heterogeneity of the vehicles and their attributes? | N | Y | Y | N | Y | Y | N | Y | Y | Y | Y | N |
| Was made a calibration for the parameters used into the interaction model pedestrians-vehicle? | NR | NR | NR | NR | Y | NA | Y | Y | NA | NA | NA | NA |
| Does the technique used for the calibration of the model correspond to that appropriate for the model used? | NA | NA | NA | NA | Y | NA | Y | Y | NA | NA | NA | NA |
| Was made a validation to the used model? | Y | NA | Y | Y | Y | Y | Y | Y | NA | NA | NA | NA |
| Does the technique used for the validation of the model correspond to the technique appropriate to the type of results obtained? | Y | NA | Y | Y | Y | Y | Y | Y | NA | NA | NA | NA |
| Was an appropriate explanation made to the obtained results? | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y |
| Score | 0.64 | 0.73 | 0.8 | 0.64 | 0.8 | 0.93 | 0.86 | 0.73 | 0.83 | 0.83 | 0.83 | 0.81 |
| Classification | Moderate | Strong | Strong | Moderate | Strong | Strong | Strong | Strong | Strong | Strong | Moderate | Strong |
| Classification | Score |
|---|---|
| Weak | [0, 0.4) |
| Moderate | [0.4, 0.7) |
| Strong | [0.7, 1] |
| Study | Methodology Data collection | Characteristics of the Study Location | Geometrical Characteristics of the Study Location | Analysis Technique for Pedestrian Behavior | Analysis Technique for Driver Behavior | Coupling between Pedestrian and Vehicle Analysis | Calibration | Validation |
|---|---|---|---|---|---|---|---|---|
| (Sun et al., 2003) | Video recording | Educative area | Two way one-lane; | Pedestrian Gap Acceptance (PGA) using binary logit model | The binary logit model was used to predict the motorist yield (MOY) | The Dynamic Interaction Model system combined the outputs of the PGA and MOY models | The calibration of the binary logit model involves the determining of the parameter vector β (coefficient of variables) and is determined with the combination function (utility function) | One set of data was used for validate the model for each entity |
| (Ottomanelli et al., 2012) | Video recording | Educative area | One way one-lane | Discrete Event System: assigns a gap acceptance value for each event | Discrete Event System: The probability of yielding was assigned based on the field data | An algorithm was used for DES that, based on certain situations for the model, the Pedestrian-Vehicle interaction can be achieved for each generated entity. | - | Average pedestrian waiting time (APWT) and an average vehicle waiting time (AVWT) were used to evaluate the reliability of predictions |
| (Schroeder et al., 2014) | Video recording | In total, 27 Mid-blocks were analyzed: 11 located in student area 16 distributed in residential and commercial area | 22 one way two-lane; 1 two way two-lane; 2 one way three-lane; 1 one way one-lane; 1 one way one-lane | Pedestrian Gap Acceptance (PGA) using binary logit model | Binary logit model was used to analyze the driver yielding behavior | The pedestrian-vehicle interaction simulation was implemented in a new version microsimulation tool that is currently under development at the University of Florida under the guidance of Dr. Scott Washburn. | Conditions with different flows of vehicles and pedestrians, in addition to the different geometries of the study sites forced to calibrate the models and submodels at each crossing. | The yield model and gap model was validated, a crossing by state was taken into account, for the yield model the probability of yield was analyzed, they were calculated for each observation from the models and they were represented according to the decision observed by the driver. For the gap model were used to predict gap acceptance probability, this validation capacity was separated into two levels, strong Prediction, weak Prediction. |
| (Chen et al., 2016) | Counting and video recording | Commercial area | Oneway two-lanes | Bidirectional pedestrian model developed by Blue and Adler (2001) and Binary logit model determine the probability that the pedestrian crossed | The cellular automata model is used to depict the motion of vehicle; The vehicular traffic model consists of a vehicle-following sub model and a lane changing sub model.the decision making of the vehicle, a logit binary model was used to determine the probability of yielding to pedestrians. | Pedestrian-vehicle interaction is carried out through the framework of game theory | Four types of parameters were calibrated: The vehicle characteristics Pedestrians characteristics The coefficients in binary logit regression model The noise parameter in the imitation rule | Two level of validation were used: 1. The first level consisted of comparing the average outputs obtained from the model with field observations as a way testing the overall predictive power of the model. (vehicle delay, pedestrian delay); 2. Statistical comparison of the outputs: The method used to achieve this was a confidence interval and hypothesis test for the mean based in the t distribution. |
| (Wu et al., 2019) | Video recording and surveys | Mixed area (Educative area and residencial area) | two-way four-lane | Cellular automata model | Cellular automata model | Pedestrian-vehicle game model is applied to solve the problem of decision-making uncertainty between vehicles and crossing pedestrians. | The survey data, the headways and waiting time was used to calibrate the model | The space-time distribution of the traffic volume under the critical state was used for the validation of the model results |
| (Lu et al., 2016) | Video recording | Commercial area | two-ways two-lanes | SFCA (Social Force Cellular Automaton) model | Model of Nagel-Schreckenberg to imitate the driving manoeuvres and the actions of the vehicles. The vehicle yielding model was used for decision making | The discrete CA (Cellular Automaton) model was used to simulate pedestrian-vehicle interaction behavior, in which the pedestrians and vehicles are allowed to move between cells at every timestep. | The model is calibrated with detailed behavioral data collected and extracted from field observations. The capability of the calibrated model in predicting the pedestrian-interaction events as well as estimating te driver yielding rate and pedestrian delay are also tested and demonstrated. | The models were validated analyzing the error percentage of the number of interactions and the range of yield, in addition the pedestrian delay was also analyzed. |
| (Feliciani et al., 2017) | Video recording | Residential area | two way one-lane | Cellular model automata and the acceptance of the gap were assigned depending on the distribution of the data observed | The car following method is based on a modified version of the Gipps model, a probability of yielding was assigned based on a field distribution | Cellular Automata model was used for the analysis of pedestrian-vehicle interaction, adding specific rules of the behavior of the two agents | Since the model is based on qualitative aspects captured by video recordings, its parameters use empirical data and therefore do not require iterative calibration | In order to validate the model, delays (or waiting times) measured for both pedestrians and drivers were compared with simulated values |
| (Schroeder et al., 2010) | Counting and video recording | Educative area | one way two-lane | - | The binary logit model | - | - | - |
| (Salamati et al., 2013) | Counting and video recording | Urban areas | One two-lane entry and One two-lane exit | - | The analysis used logistic regression to model the likelihood of drivers yielding based on several factors. | - | - | - |
| (Schneider et al.,2018) | Counting and video recording | Central business district | Oneway two-lanes | - | A binary logistic model was to use for analyze the driver yielding behavior | - | - | - |
| (Fricker and Zhang, 2019) | Video recording | Educative area | One way one-lane and two way one-lane | A binary logistic regression model and the mixed logit model were applied | A logistic regression model was to use for analyze | - | - | - |
| Study | Input/Variables Used | Influential Variables for Pedestrian Analysis | Influential Variables for Vehicle Analysis | Conclusions (Authors) |
|---|---|---|---|---|
| (Sun et al., 2003) | The variables used to analyze pedestrian behavior were age, gender, waiting time, gap size and number of pedestrians waiting to cross. The variables used for the drivers were, age, gender, vehicle type (car, SUV or pick-up, truck or bus), number of pedestrians waiting and opposite direction traffic condition. | Gap size, number of pedestrians waiting, and age of pedestrians. | Opposite direction traffic and the type of vehicle. | The main contribution of the models proposed lies in application of these validated models into a simulation framework which can replicate the traffic realities at mid-block crosswalks to improve the safety of pedestrians. |
| (Ottomanelli et al., 2012) | Time between the arrival of two consecutive pedestrians at the crossing, recorded for each crossing direction (TPA); Walking speed of pedestrian; Time between the arrival of two consecutive vehicles at the crossing (TVA); Speed of vehicles; Percentage of drivers that intentionally stop the vehicle to let pedestrians cross. | Pedestrian waiting time (PWT) to begin crossing the street | Vehicle waiting time (VWT) if a vehicle has to stop because pedestrians are crossing the street | With ordinary measurements relevant to vehicular and pedestrian flows at real crossing, it is possible to simulate with good accuracy and reliability the behavior of the system. Also, the developed model is scalable; it can be easily maintained, reused, and extended for different application sites and case studies |
| (Schroeder et al., 2014) | Variables focused on the behavior of the first vehicle that entered into interaction with the pedestrian were used (speed vehicle, The distance from the vehicle to the researcher, yield to pedestrian or not, was in platoon, type of vehicle, type of yield), the variables were used for the pedestrian (group, pedestrian crossed from the mediam or the cub, the crossing pedestrian was controlled, site where the pedestrian stopped crosswalk or curb) | the size of the gap length in seconds, and a binary variable distinguishing between gaps and lag events | Presence of adjancent yields, low speed plattons, presence of multiple pedestrians and female pedestrians | Using the global default pedestrian parameters results in similar rates of no delay, but the average delay depends much more on site-specific flow rate. They added that although the simulation recreates reasonable delay values for a set of site-specific flow rates, it is necessary to develop the simulation to replicate the largest observed delays. |
| (Chen et al., 2016) | The distance between the vehicle and the pedestrian along the vehicle movement direction (DISTANCE); Vehicle speed (VEHSPEED); Vehicle type (VEHTYPE); Pedestrian speed (PEDSPEED); The number of pedestrian arriving at the crossing point (PEDNUMBER) | Pedestrian speed (PEDSPEED) | DISTANCE and vehicle speed (VEHSPEED) | In order to take into account the decision process of vehicle drivers and pedestrians during the interaction, evolutionary game theory and cumulative prospect theory are employed for addressing the crossing decision behavior under bounded rationality and risk. Futhermore, the model developed by the authors can capture the phenomenon of disagreement among a pedestrian crossing group, which could help to better understanding the herd mentality. |
| (Lu et al., 2016) | Were classified into three categories: Pedestrian characteristics and situation (gender, age, attitude, position, clothes colour, etc.); Vehicle characteristics (vehicle type, distance to conflict pedestrian, time headway, etc.) and Traffic condition (adjacent condition of yielding to the pedestrians that may occur with the vehicle in the other lane os the road) | Attitude and presence of pedestrian group | Time headway and vehicle speed | Through comparison of the average interaction events and driver yielding rates obtained from simulation model and field data, the authors demonstrated that the simulation model can replicate pedestrian-vehicle interaction with high accuracy and reliability. In addition, the proposed model also makes a good prediction of pedestrian delay. |
| (Feliciani et al., 2017) | The model used constants and parameters for the modeling of the PVI (pedestrian speed, vehicle speed, gap acceptance for pedestrian, car density, pedestrian flow, etc.) those were mostly obtained from the field study. Some values taken from literature is the drivers’ reaction time and the pedestrians’, acceleration and deceleration. | Pedestrian flow, pedestrian delay | Vehicle flow, vehicle delay | Simulations show that a good agreement with delay of both road users is found when pedestrians are supposed to estimate velocity of incoming vehicles and judge if they can stop in the given distance. Furthermore, they highlight that the use of the accepted gap also led to somehow acceptable results, but the concept needs to be investigated further to allow a successful implementation in the simulation model. |
| (Wu et al., 2019) | the model used the headways and the waiting time as main variables, three parameters were analyzed for pedestrians (the occupancy, the direction, the conformity). | Pedestrian delay, traffic conflict | Traffic volume | The threshold of traffic flow and pedestrian flow causing traffic conflicts and delay is proposed. In addition, the authors include the threshold of pedestrian arrival rate which will induce force crossing behaviors. The model develops provides some practical references for transportation agencies to meet pedestrians time-cost and comfort needs in crossing streets when they design pedestrian crossing facilities. |
| (Schroeder et al., 2010) | The variables used for the study describing driver characteristics (vehicle platooning, type of vehicle, vehicle is part of a queue of vehicles, vehicle speed), pedestrian characteristics (pedestrian assertiveness, multiple pedestrians, Pedestrian is waiting on the near side of the approaching vehicle, Indication whether the flashing beacon was actuated by the pedestrian), the dynamics of the closest approaching vehicle (approaching vehicle has close follower, ), and the circumstances surrounding the pedestrian-vehicle interaction event (presence of an adjacent yield in the opposite direction, the previous vehicle passed without yielding) | pedestrian assertiveness | vehicle platooning | Vehicle yields also showed a strong correlation with the behavior of the pedestrian. An assertive pedestrian, who walks briskly in the approach to the crosswalk, appears to frequently elicit a response from the driver by increasing the likelihood of yielding. A strong effect of vehicle platoons in reducing the likelihood of yielding |
| (Schneider et al.,2018) | Three different types of variables were taken into account: Demographic variables (gender, race/ethnicity, age) for pedestrians and drivers; Behavior variables (pedestrian assertively, position of pedestrian and pedestrian group); site variables (Traffic volume, vehicel speed, bus stop present, adjacent commercial land use, etc.) | pedestrian race/ethnicity, position of pedestrian, pedestrian assertively | traffic volumes, vehicle speed, distance of crosswalk | The authors concluded, based on the results that roadway design strategies such as reducing roadway design speeds and narrowing roadway crossing distances to increase the probability of drivers yielding to pedestrians. They also suggest the importance of educating pedestrians and drivers so that pedestrians can carefully and confidently assert their right-of-way in uncontrolled crosswalks. |
| (Salamati et al., 2013) | The variables describe the interaction between the first vehicle and the pedestrian; vehicle speed, type of vehicle, lane in which first vehicle was driving, vehicle platooing, presence of conflicts at the entrance of the roundabout, type of pedestrian (appeared to be blind and carried a white cane), waiting position of pedestrian (at curb or passive, in road or aggressive) | Type of pedestrian, waiting position of pedestrian | Vehicle speed, lane in which fist vehicle was driving | The authors concluded even when controlling for vehicular speed, pedestrian behavior, vehicle platooning, and other factors, the study showed that other site-specific variables or driver culture explained a significant portion of the differences in yielding behavior. |
| (Fricker and Zhang, 2019) | Four different types of variables were taken into account: Pedestrians dynamics (gender, hesitation, pedestrians position, number of pedestrians waiting, age, gropu size, etc.), vehicle dynamics (approach speed, adjacent vehicle, approach to the crosswalk), environmental characteristics (interaction’s distance), response behavior (pedestrians outcomes, vehicle response) | Approach speed, Hesitation, distance and pedestrian position | Approach speed, hesitation and number of pedestrians waiting | The authors concluded that a driver’s decision is mainly influenced by interacted pedestrian behavior and the environmental characteristics when an interaction occurs. Furthemore, the change of one-way to two-way operation removed the effects of interaction between vehicles (follower vehicle and adjacent vehicle) on a driver’s decision and led drivers to react more to the interacted pedestrian. |
| Steps to Follow | Step Content |
|---|---|
| 1. Tools used for data collection | Video camera, pedestrian and vehicle counts, speed measuring guns |
| 2. Moment of information gathering | Peak hour, day of week, climate conditions, etc |
| 3. Description of the site where the study is conducted | Crossing location Pedestrian crossing dimensions Type of pedestrian crossing Road classification |
| 4. What type of information will be collected? | Variables Parameters Attributes |
| 5. Detailed description of how the methodology is applied | When an interaction is considered, assumptions |
| 6. Description of data processing and statistics | Use of software for data processing, distribution of pedestrians along the field survey, etc. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Amado, H.; Ferreira, S.; Tavares, J.P.; Ribeiro, P.; Freitas, E. Pedestrian–Vehicle Interaction at Unsignalized Crosswalks: A Systematic Review. Sustainability 2020, 12, 2805. https://doi.org/10.3390/su12072805
Amado H, Ferreira S, Tavares JP, Ribeiro P, Freitas E. Pedestrian–Vehicle Interaction at Unsignalized Crosswalks: A Systematic Review. Sustainability. 2020; 12(7):2805. https://doi.org/10.3390/su12072805
Chicago/Turabian StyleAmado, Harley, Sara Ferreira, José Pedro Tavares, Paulo Ribeiro, and Elisabete Freitas. 2020. "Pedestrian–Vehicle Interaction at Unsignalized Crosswalks: A Systematic Review" Sustainability 12, no. 7: 2805. https://doi.org/10.3390/su12072805
APA StyleAmado, H., Ferreira, S., Tavares, J. P., Ribeiro, P., & Freitas, E. (2020). Pedestrian–Vehicle Interaction at Unsignalized Crosswalks: A Systematic Review. Sustainability, 12(7), 2805. https://doi.org/10.3390/su12072805