An Improved Transit Signal Priority Strategy for Real-World Signal Controllers that Considers the Number of Bus Arrivals


Abstract
1. Introduction
2. TSP Strategy Analysis
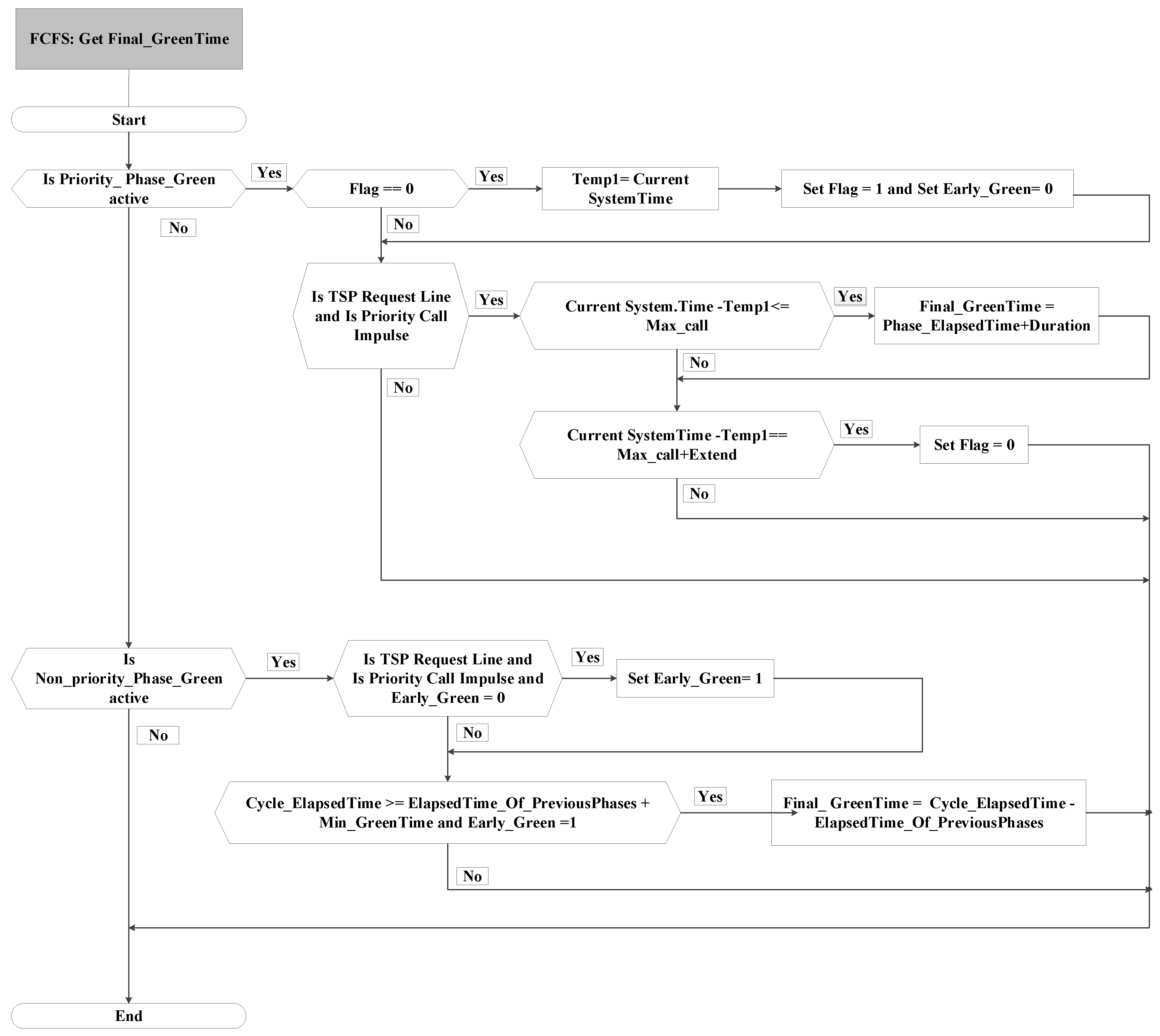
2.1. FCFS TSP Strategy
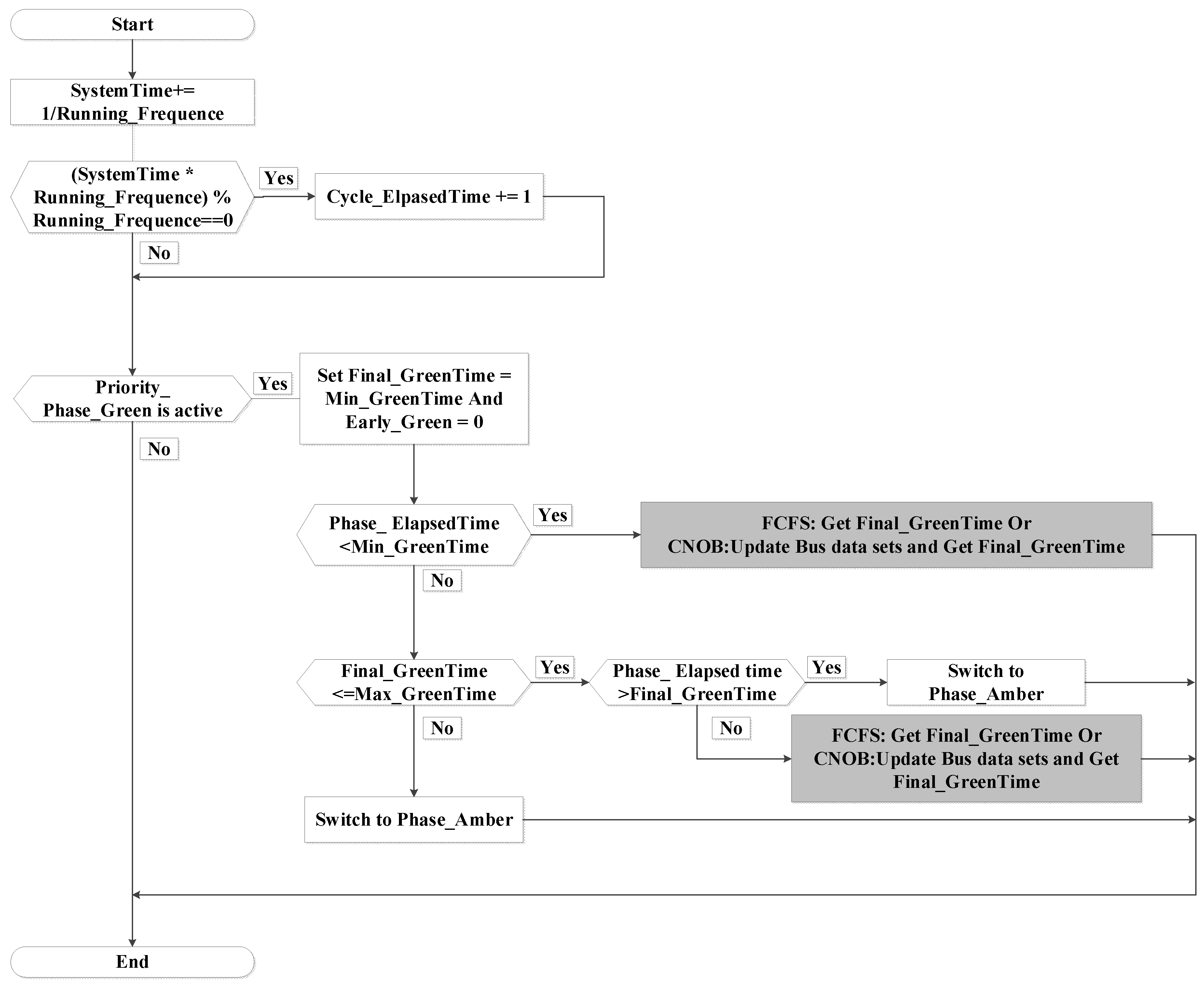
2.1.1. Priority Phase
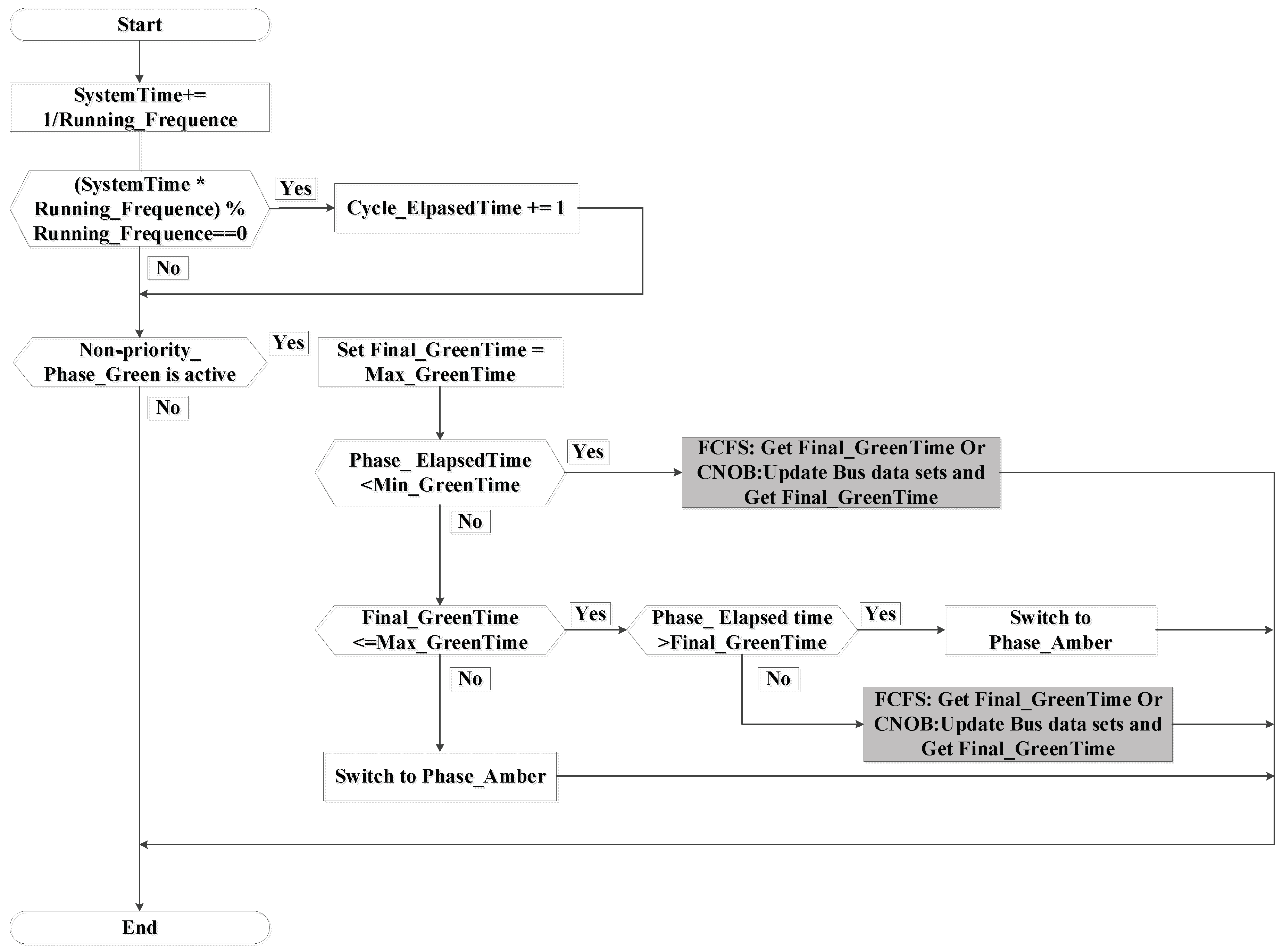
2.1.2. Non-Priority Phase
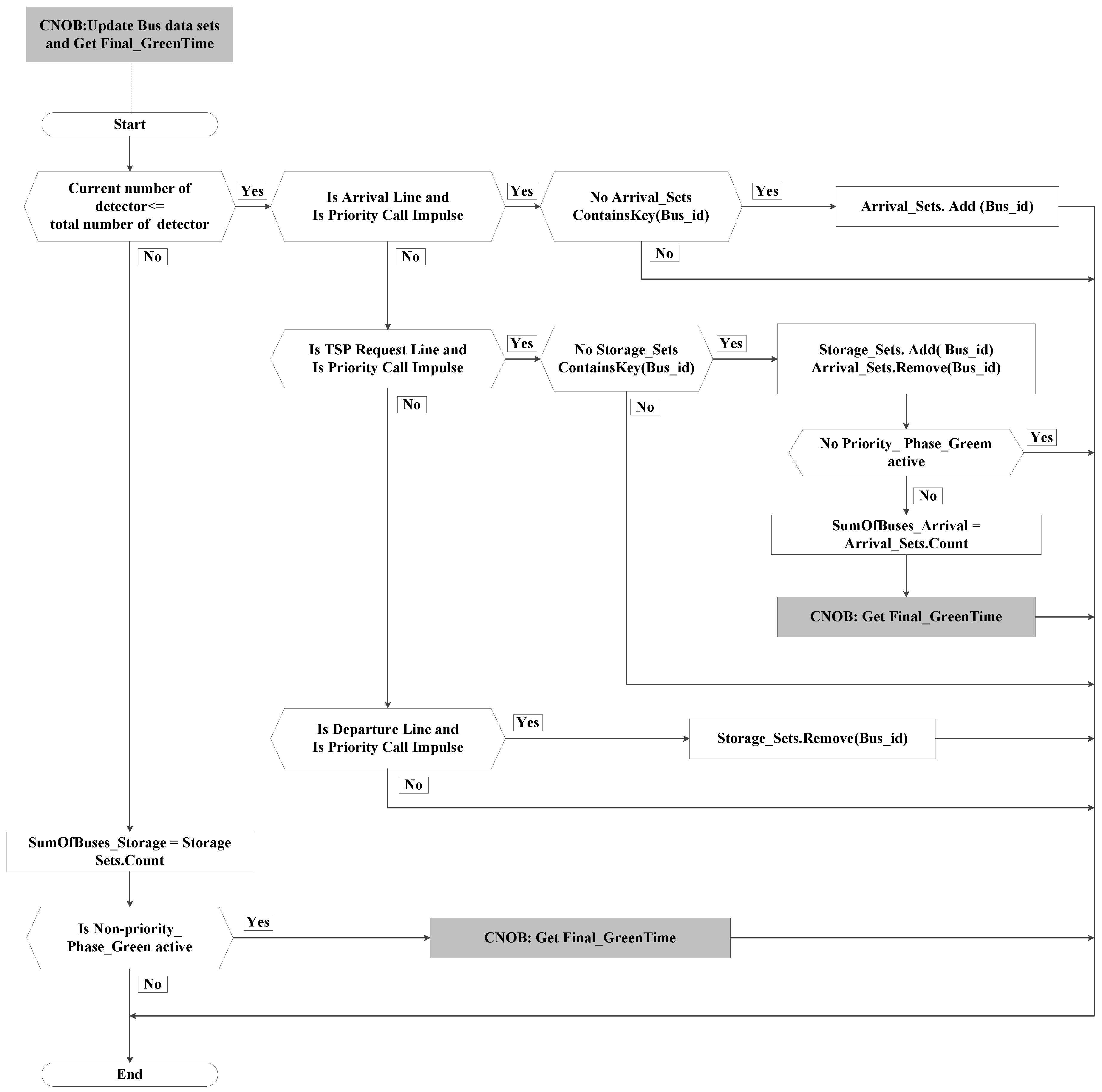
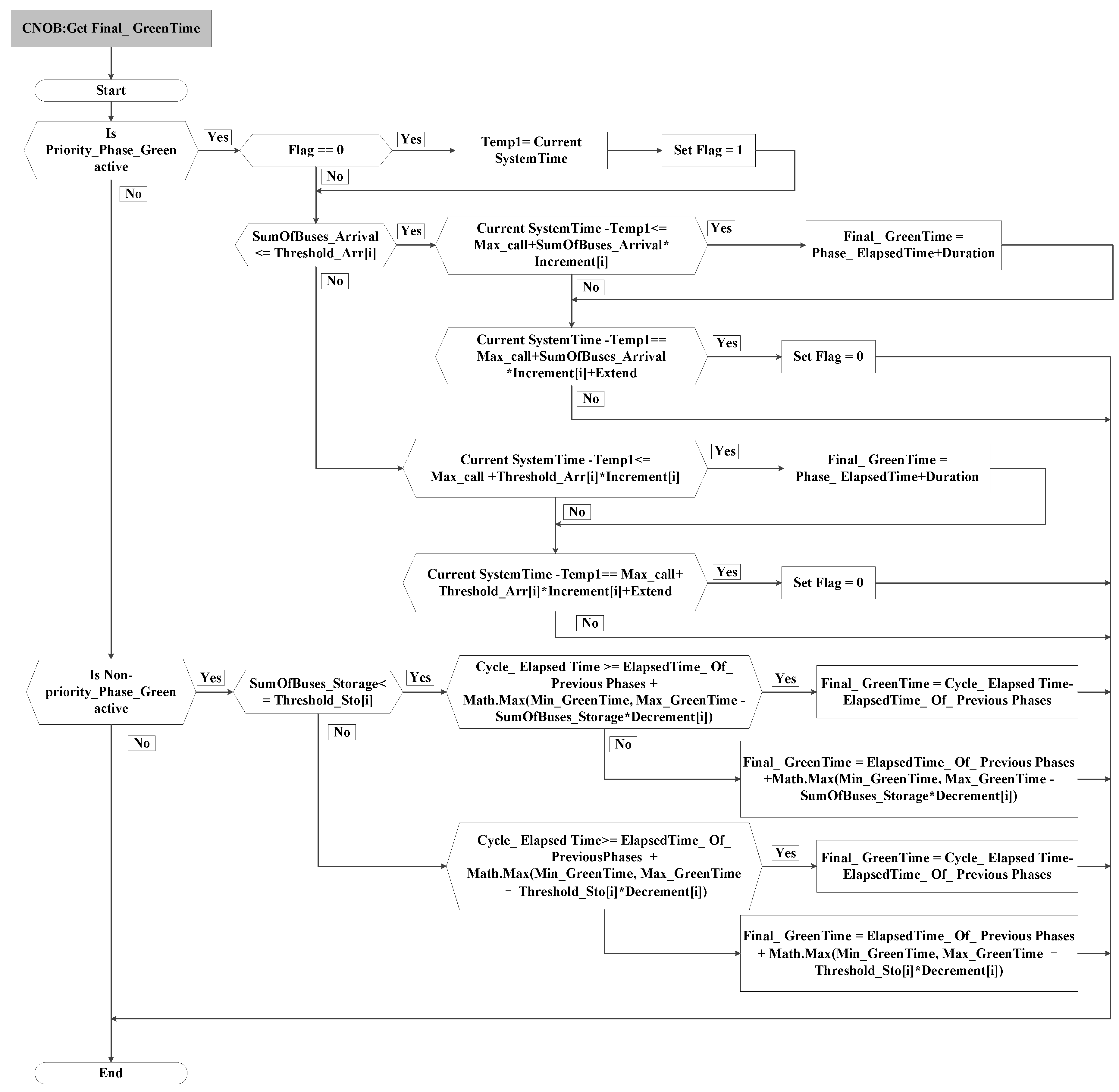
2.2. CNOB TSP Strategy
2.2.1. Priority Phase
2.2.2. Non-Priority Phase
3. Experiment Design
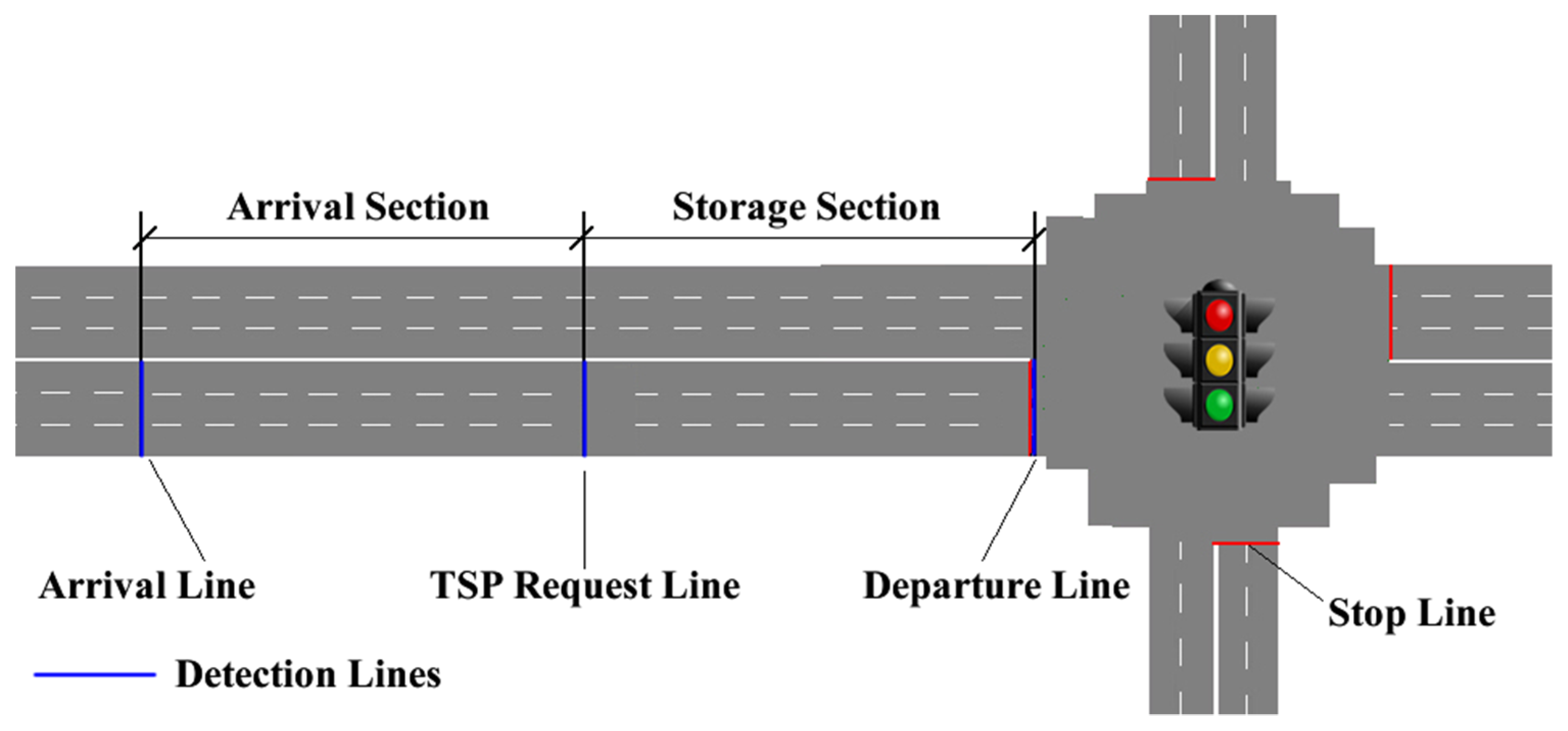
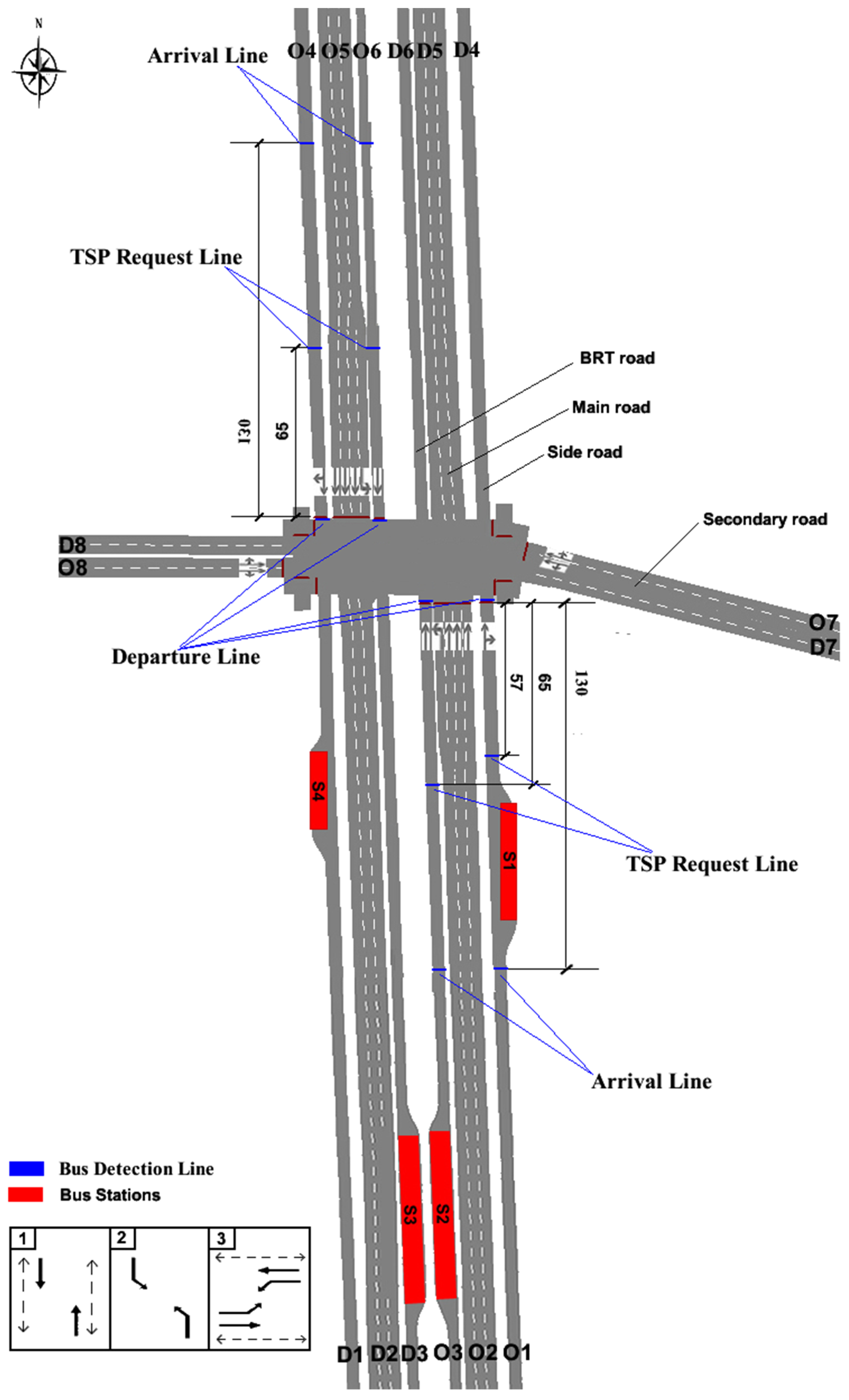
3.1. Simulation Intersection
3.2. Traffic Demand and Occupancy
3.3. Experiment Plan
4. Results and Discussion
4.1. Performance Comparison
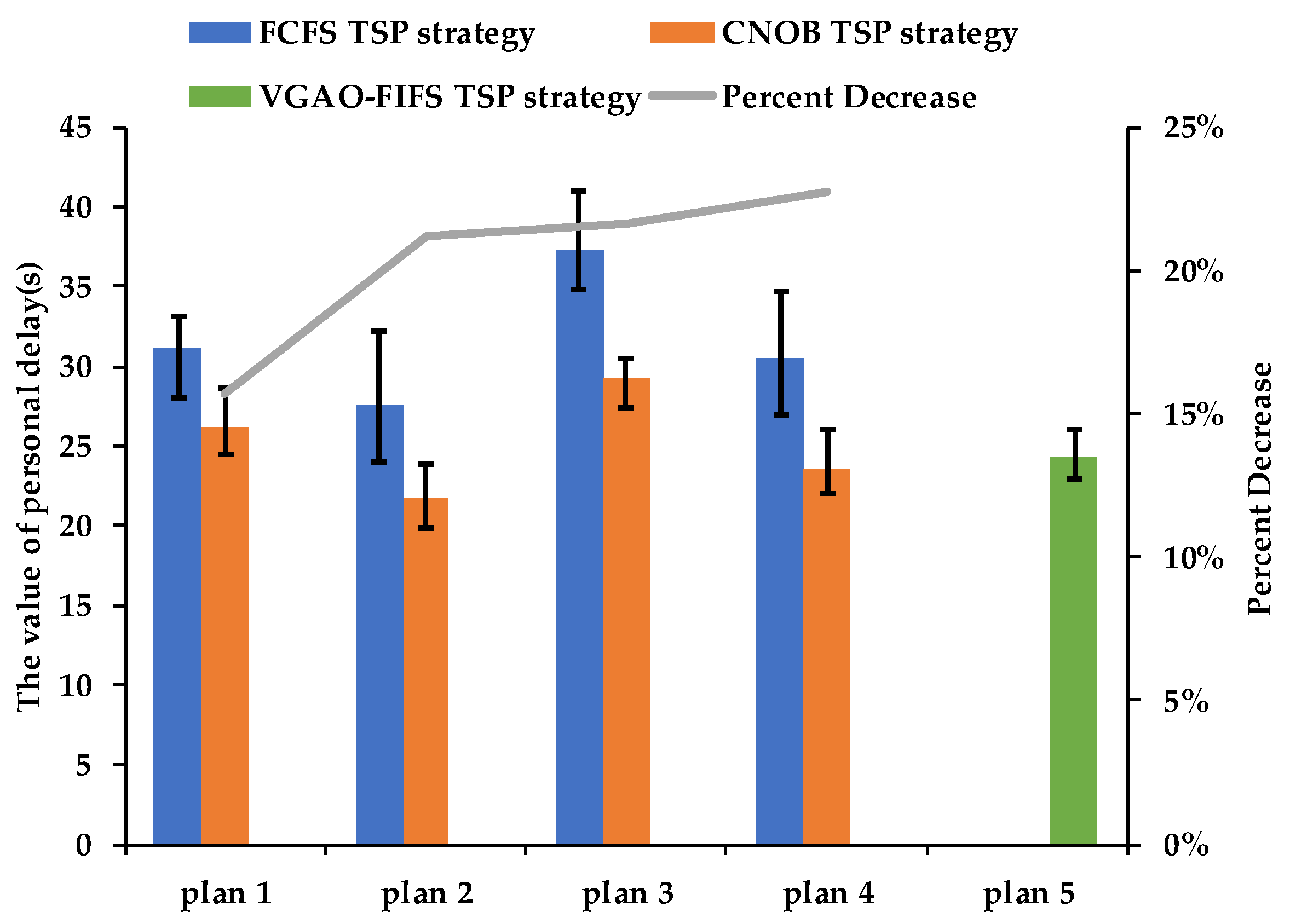
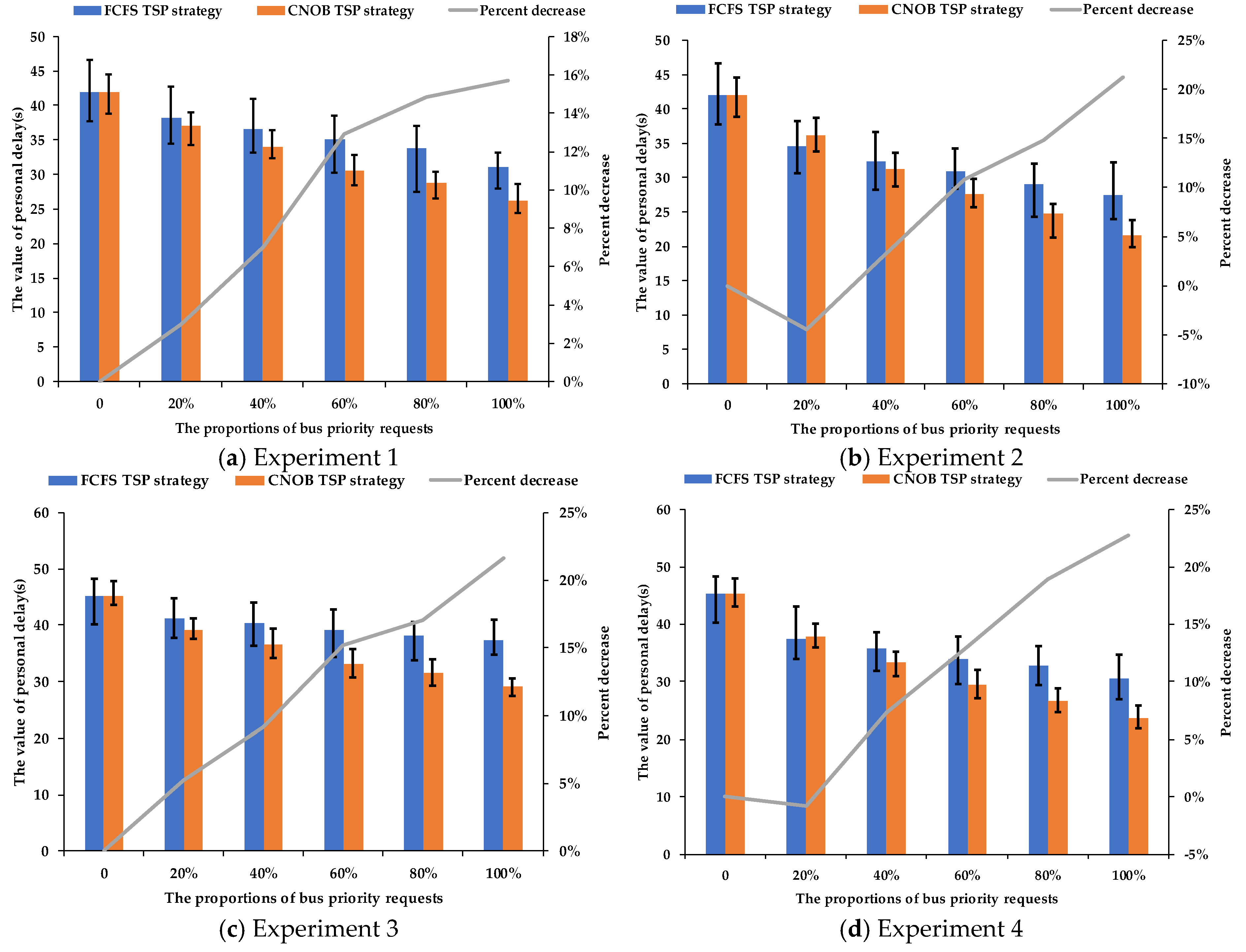
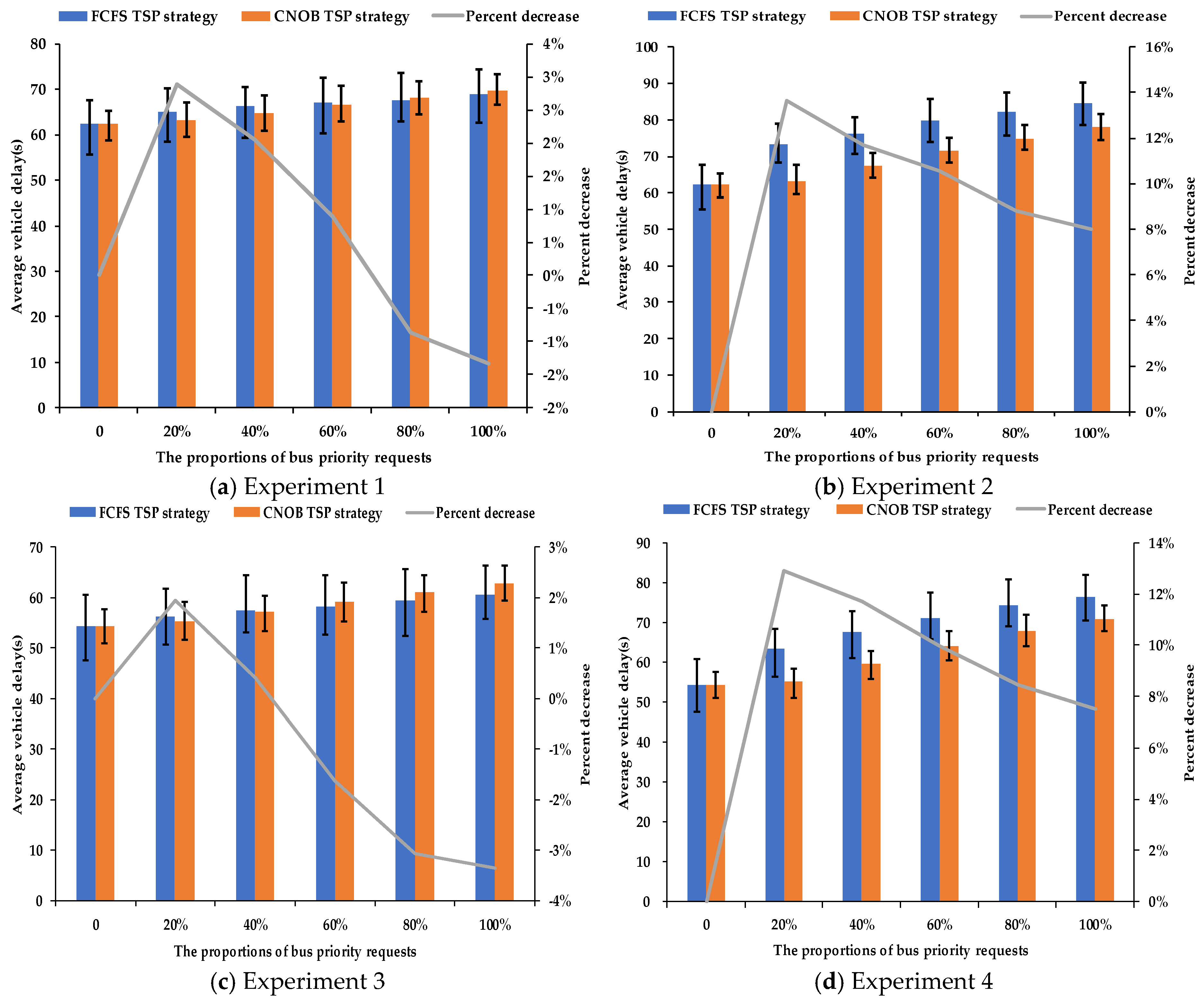
4.1.1. Delay Analysis
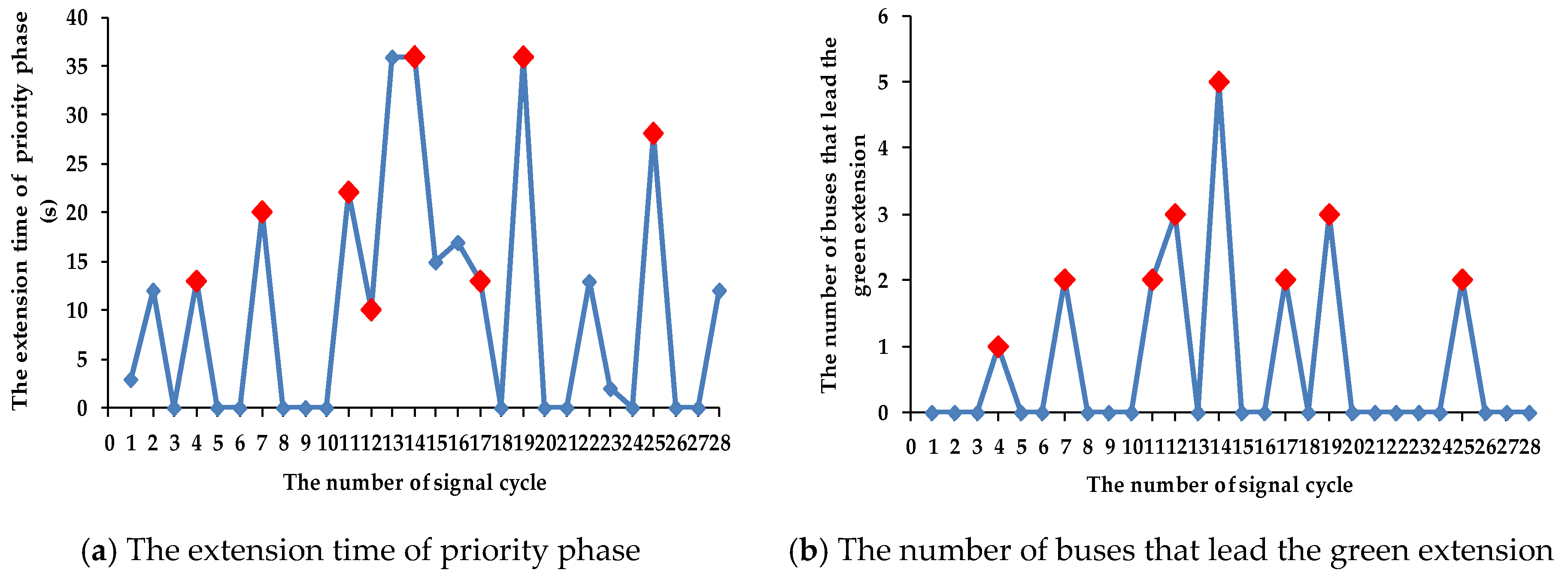
4.1.2. Green Extension Analysis
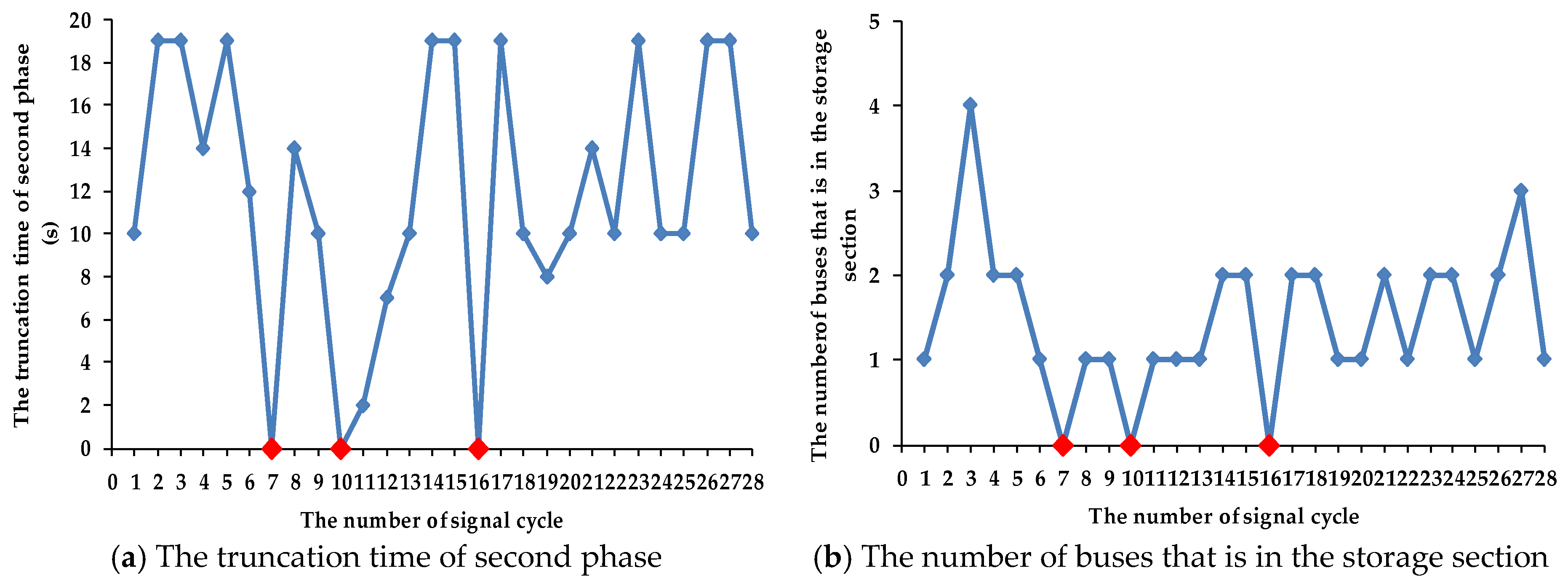
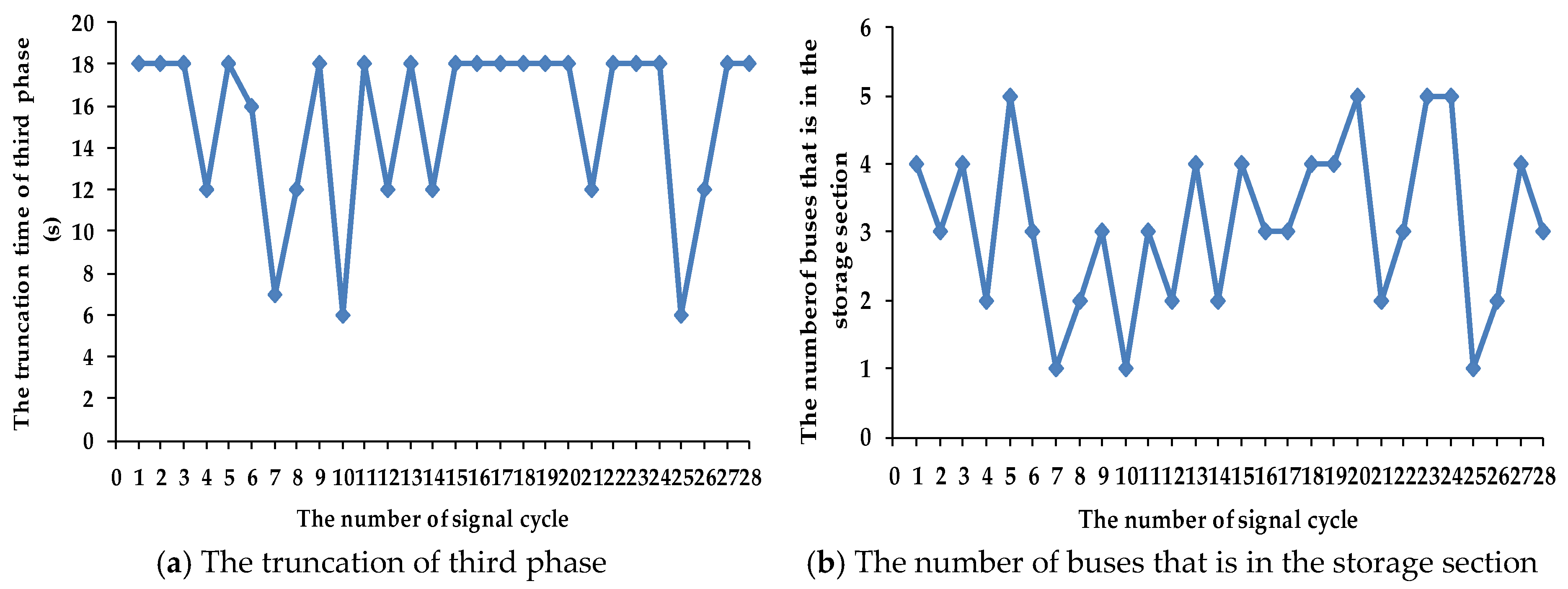
4.1.3. Early Green Analysis
4.2. Sensitivity Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bagherian, M.; Mesbah, M.; Ferreira, L.; Charles, P.; Khalilikhah, M. Network-Wide Optimization of Transit Signal Priority. In Proceedings of the 94th Annual Meeting for Transport Research Board (TRB), Washington, DC, USA, 11–15 January 2015; pp. 15–1146. Available online: https://trid.trb.org/view/1336954 (accessed on 12 September 2015).
- Truong, L.T.; Currie, G. Coordinated transit signal priority model considering stochastic bus arrival time. IEEE Trans. Intell. Transp. Syst. 2018, 20, 1269–1277. [Google Scholar] [CrossRef]
- Albright, E.; Figliozzi, M. Integration of Multi-modal Transportation Data Sets to Provide Transit Signal Priority Stop-level Performance Measures. In Proceedings of the Western ITE Conference Proceedings, Anchorage, AK, USA, 10–13 July 2011. [Google Scholar]
- Ghanim, M.; Dion, F.; Abu-Lebdeh, G. Integration of Signal Control and Transit Signal Priority Optimization in Coordinated Network Using Genetic Algorithms and Artificial Neural Networks. In Proceedings of the 88th Annual Meeting of the Transportation Research Board (TRB), Washington, DC, USA, 11–15 January 2009; pp. 9–3063. Available online: https://trid.trb.org/view/882077 (accessed on 30 January 2009).
- Zhang, J. Evaluation of transit signal priority using analytical method. Ph.D. Thesis, Texas Tech University, Lubbock, TX, USA, 2007; pp. 1–55. Available online: http://hdl.handle.net/2346/8819 (accessed on 20 June 2007).
- Sun, Z.; Lu, H.; Wan, J. Modeling and simulation of intersection signal control for transit priority. In Proceedings of the 25th Chinese Control and Decision Conference (CCDC), Guiyang, China, 25–27 May 2013; pp. 4496–4501. [Google Scholar] [CrossRef]
- Stevanovic, J.; Stevanovic, A. Stochastic optimization of traffic control and transit priority settings in VISSIM. Transp. Res. Part C 2008, 16, 332–349. [Google Scholar] [CrossRef]
- Stevanovic, A.; Stevanovic, J. Traffic control optimization for multi-modal operations in a large-scale urban network. In Proceedings of the IEEE Forum on Integrated and Sustainable Transportation Systems, Vienna, Austria, 29 June–1 July 2011; pp. 146–151. [Google Scholar] [CrossRef]
- Ghanim, M.S.; Abu-Lebdeh, G. Microscopic simulation study of transit signal priority implementation along an arterial corridor. In Proceedings of the 5th International Conference on Modeling, Simulation and Applied Optimization (ICMSAO), Hammamet, Tunisia, 28–30 April 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Xu, H.; Zheng, M. Impact of phase scheme on development and performance of a logic rule-based bus rapid transit signal priority. J. Transp. Sys. Eng. 2009, 135, 953–965. [Google Scholar] [CrossRef]
- Ma, W.; Ye, X. Optimal offline cycle length model based on online bus priority demand. J. Transp. Syst. Eng. Info. Technol. 2013, 13, 124–129. [Google Scholar] [CrossRef]
- Byrne, N.; Koonce, P.; Bertini, R.L.; Pangilinan, C. Using hardware-in-the-loop simulation to evaluate signal control strategies for transit signal priority. Transp. Res. Rec. 2005, 1925, 227–234. [Google Scholar] [CrossRef]
- Li, M.; Wu, G.; Li, Y. Active signal priority for light rail transit at grade crossings. Transp. Res. Rec. 2007, 2035, 141–149. [Google Scholar] [CrossRef]
- Currie, G.; Shalaby, A. Active transit signal priority for streetcars: Experience in Melbourne, Australia, and Toronto, Canada. Trans. Res. Rec. 2008, 2042, 41–49. [Google Scholar] [CrossRef]
- Consoli, F.A.; Alomari, A.H.; Al-Deek, H. Evaluation of conditional transit signal priority technology for regional implementation. Transp. Res. Rec. 2015, 2484, 140–148. [Google Scholar] [CrossRef]
- Tan, X.Y.; Li, J.; Deng, W. Signal Strategy of Conditional Transit Priority Based on Transit Schedule. Advanced Materials Research. Trans. Tech. Publ. 2011, 156, 298–302. [Google Scholar] [CrossRef]
- Xuejin, Z.; Qingsong, L.; Tao, L. Study on Conditional Bus Priority Signal Setting Based on Running Timetable. In Proceedings of the 2010 International Conference on Intelligent Computation Technology and Automation, Changsha, China, 11–12 May 2010; Volume 3, pp. 486–488. [Google Scholar] [CrossRef]
- Xu, H.; Sun, J.; Zheng, M. Comparative analysis of unconditional and conditional priority for use at isolated signalized intersections. J. Transp. Sys. Eng. 2010, 136, 1092–1103. [Google Scholar] [CrossRef]
- Bie, Y.; Wang, D.; Song, X. Conditional bus signal priority strategies considering saturation degree restriction at isolated junction. J. Southwest Jiaotong Univ. 2011, 46, 657–663. [Google Scholar] [CrossRef]
- Bie, Y.M.; Wang, D.H.; Wei, Q. Conditional active and passive bus signal priority strategies considering saturation degree restriction at an isolated junction. J. Jilin Univ. (Eng. Technol. Ed.) 2011, 41, 1222–1227. [Google Scholar] [CrossRef]
- Feng, L.; Jian, W. Active transit signal priority considering overlapping phase in artery progression. In Proceedings of the 2010 2nd International Conference on Advanced Computer Control, Shenyang, China, 27–29 March 2010; Volume 2, pp. 272–277. [Google Scholar] [CrossRef]
- Liu, B.; Zhao, Z.; Niu, X. Analysis of total passager delay at the intersection based on active bus priority strategy. In Proceedings of the 2012 2nd International Conference on Computer Science and Network Technology, Changchun, China, 29–31 December 2012; pp. 2191–2196. [Google Scholar] [CrossRef]
- Lian, P.; Li, Z.; Rong, J.; Keel, J.; Lai, Y.; Chen, N. A cycle optimization method for multiple TSP requests based on VISSIM-based GA. Int. J. Simul. Syst. Sci. Technol. 2016, 17. [Google Scholar] [CrossRef]
- Siemens Energy & Automation. ACTRA Users Manual version 4.3.9; Siemens Energy & Automation: Munich, Germany, 2006; pp. 253–286. [Google Scholar]
- Oliveira-Neto, F.M.; Loureiro, C.F.G.; Han, L.D. Active and passive bus priority strategies in mixed traffic arterials controlled by SCOOT adaptive signal system: Assessment of performance in Fortaleza, Brazil. Transp. Res. Rec. 2009, 2128, 58–65. [Google Scholar] [CrossRef]
- Liu, Z.; Qiao, W. A rule-based signal compensation strategy for the non-bus-priority approaches at an intersection. In Proceedings of the 15th COTA International Conference of Transportation Professionals, Beijing, China, 24–27 July 2015; pp. 2007–2017. [Google Scholar] [CrossRef]
- Fang, S.Y.; Li, F. A Distributed Phase Time Optimization Method of the Coordinated Control for Active Bus Signal Priority. In Advanced Materials Research; Trans Tech Publications: Kapellweg, Switzerland, 2012; Volume 468, pp. 233–237. [Google Scholar] [CrossRef]
- Liu, Z.; Guo, X. Analysis of an Intersection Based on Active Priority Strategies, International Conference on Green Intelligent Transportation System and Safety; Springer: Berlin/Heidelberg, Germany, 2016; pp. 737–750. [Google Scholar] [CrossRef]
- Jeong, Y.; Kim, Y. Study on the Optimal Detector Location for the Active Bus Signal Priority of the Median Bus Lane. In Proceedings of the 17th ITS World Congress ITS JapanITS AmericaERTICO, Busan, Korea, 25–29 October 2010; Available online: https://trid.trb.org/view/1090905 (accessed on 30 June 2019).
- Huang, H.; Li, X.; Lian, P.; Rong, J. Trigger probability model of transit signal priority strategies based on signal timing. J. Comput. Appl. 2018, 38, 3025–3029. [Google Scholar] [CrossRef]
- Stevanovic, A.; Abdel-Rahim, A.; Zlatkovic, M. Microscopic modeling of traffic signal operations: Comparative evaluation of hardware-in-the-loop and software-in-the-loop simulations. Transp. Res. Rec. 2009, 2128, 143–151. [Google Scholar] [CrossRef]
- Zlatkovic, M.; Stevanovic, A.; Martin, P.T. Development and evaluation of algorithm for resolution of conflicting transit signal priority requests. Transp. Res. Rec. 2012, 2311, 167–175. [Google Scholar] [CrossRef]
- Ma, W.; Bai, Y. Serve sequence optimization approach for multiple bus priority requests based on decision tree. In Plan, Build, and Manage Transportation Infrastructure in China, Proceedings of the Seventh International Conference of Chinese Transportation Professionals Congress, Shanghai, China, 21–22 May 2008; ASCE: Reston, VA, USA, 2008; pp. 605–615. [Google Scholar] [CrossRef]
- Ahmed, B. Exploring new bus priority methods at isolated vehicle actuated junctions. Transp. Res. Proc. 2014, 4, 391–406. [Google Scholar] [CrossRef][Green Version]
- Yun, I. Evaluation of stochastic optimization methods of traffic signal control settings for coordinated actuated signal systems. Ph.D. Thesis, University of Virginia, Charlottesville, VA, USA, 2005. Available online: https://trid.trb.org/view/776787 (accessed on 3 March 2006).
- Planung Transport Verkehr (PTV) AG. VISSIM 5.30-05 User Manual; Planung Transport Verkehr: Karlsruhe, Germany, 2011; pp. 453–454. [Google Scholar]
- Lin, Y.; Yang, X.; Zou, N. Passive transit signal priority for high transit demand: Model formulation and strategy selection. Transp. Lett. 2019, 11, 119–129. [Google Scholar] [CrossRef]
- Shu, S.; Zhao, J.; Han, Y. Signal timing optimization for transit priority at near-saturated intersections. J. Adv. Transp. 2018, 2018. [Google Scholar] [CrossRef]
- Tan, M.K.; Chuo, H.S.E.; Chin, R.K.Y.; Yeo, K.B.; Teo, K.T.K. Optimization of Urban Traffic Network Signalization using Genetic Algorithm. In Proceedings of the (2017) ICOS 2016 IEEE Conference on Open Systems, Langkawi, Malaysia, 10–12 October 2016; pp. 87–92. [Google Scholar] [CrossRef]
- Li, Z.D.; Chen, K.Q. Research on Timing Optimization of Reginal Traffic Signals Based on Improved Genetic Algorithm, IOP Conference Series: Materials Science and Engineering, 2018; IOP Publishing: Bristol, UK, 2018; p. 012191. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Explanation |
|---|---|
| SystemTime | The system time of signal controller (Sec.) |
| Running_Frequence | The running times in one second (times/Sec.) |
| Cycle_ElapsedTime | The elapsed time of current signal cycle (Sec.) |
| Priority_Phase_Green | The green time period of priority phase |
| Non-priority_Phase_Green | The green time period of non-priority phase |
| Phase_ElapsedTime | The elapsed time of the current signal phase (Sec.) |
| Final_GreenTime | The green time of signal phase that real-timely calculated by TSP strategy (Sec.) |
| Phase_Amber | Change the current status of signal phase to amber |
| Phase_Green | Change the current status of signal phase to green |
| Min_GreenTime | The minimum green time of signal phase (Sec.) |
| Max_GreenTime | The maximum green time of signal phase (Sec.) |
| Early_Green | Boolean used to judge whether at least one bus passes the TSP request line when any non-priority phase is active |
| Max_call | The maximum time that a priority call for bus may remain active and be considered valid (Sec.) [24] |
| Extend | The time which is added to the end of each priority call when the assigned phase is green, during the period of Extend time, the signal controllers will not respond to any priority call (Sec.) [24] |
| Duration | The extension of green time when a priority call occurs (Sec.) [24] |
| ElapsedTime_Of_PreviousPhases | The total green time of the previous signal phases that do not include the current signal phase (Sec.) |
| Arrival_Sets | The data sets that use to record the bus arrival information in the arrival section |
| Storage_Sets | The data sets that use to record the bus storage information in the storage section |
| SumOfBuses_Arrival | The number of buses in the arrival section |
| SumOfBuses_Storage | The number of buses in the storage section |
| Threshold_Arr[i] | The maximum allowed value of buses in the arrival section that will be accepted by the signal controller for the i-th priority phase |
| Threshold_Sto[i] | The maximum allowed value of buses in the storage section that will be accepted by the signal controller for the i-th non-priority phase |
| Increment[i] | The unit extension time for one bus in arrival section for the i-th priority phase (Sec.) |
| Decrement[i] | The unit truncation time for one bus in storage section for the i-th non-priority phase (Sec.) |
| Cycle No | O1–D4 | O1–D7 | O2–D5 | O2–D8 | O4–D1 | O4–D8 | O5–D2 | O5–D7 | O7–D2 | O7–D5 | O7–D8 | O8–D2 | O8–D5 | O8–D7 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 137 | 98 | 743 | 78 | 20 | 157 | 1507 | 274 | 20 | 78 | 20 | 98 | 176 | 39 |
| 2 | 235 | 20 | 939 | 137 | 117 | 117 | 1193 | 78 | 137 | 59 | 0 | 59 | 117 | 157 |
| 3 | 352 | 39 | 587 | 98 | 0 | 215 | 1350 | 313 | 137 | 117 | 39 | 20 | 215 | 176 |
| 4 | 254 | 20 | 1096 | 39 | 39 | 137 | 1154 | 274 | 137 | 137 | 39 | 20 | 293 | 117 |
| 5 | 235 | 20 | 1585 | 117 | 39 | 117 | 1507 | 215 | 20 | 98 | 20 | 20 | 235 | 137 |
| 6 | 313 | 0 | 1252 | 78 | 78 | 157 | 1409 | 254 | 78 | 157 | 20 | 20 | 235 | 137 |
| 7 | 157 | 0 | 1487 | 98 | 59 | 137 | 1507 | 293 | 137 | 78 | 39 | 20 | 235 | 117 |
| 8 | 157 | 20 | 1193 | 98 | 117 | 98 | 1467 | 254 | 98 | 117 | 98 | 39 | 117 | 176 |
| 9 | 196 | 59 | 1037 | 157 | 98 | 78 | 1565 | 235 | 98 | 59 | 117 | 39 | 117 | 98 |
| 10 | 98 | 0 | 1193 | 59 | 59 | 98 | 1487 | 235 | 39 | 137 | 20 | 20 | 176 | 196 |
| 11 | 254 | 20 | 822 | 137 | 78 | 117 | 1487 | 235 | 39 | 137 | 39 | 137 | 137 | 78 |
| 12 | 274 | 39 | 959 | 78 | 98 | 117 | 1565 | 254 | 176 | 176 | 39 | 59 | 215 | 157 |
| 13 | 352 | 20 | 880 | 39 | 78 | 117 | 1213 | 254 | 137 | 78 | 39 | 20 | 117 | 78 |
| 14 | 215 | 117 | 1017 | 98 | 20 | 157 | 1193 | 157 | 137 | 39 | 39 | 39 | 157 | 117 |
| 15 | 254 | 39 | 1037 | 78 | 20 | 137 | 1565 | 137 | 98 | 157 | 39 | 20 | 235 | 98 |
| 16 | 235 | 0 | 1350 | 98 | 117 | 137 | 1252 | 274 | 59 | 59 | 78 | 59 | 235 | 39 |
| 17 | 333 | 78 | 1311 | 39 | 39 | 157 | 1370 | 117 | 98 | 39 | 78 | 20 | 78 | 215 |
| 18 | 293 | 59 | 1037 | 78 | 39 | 176 | 1291 | 117 | 39 | 137 | 39 | 39 | 137 | 157 |
| 19 | 274 | 0 | 1370 | 117 | 0 | 215 | 1409 | 235 | 59 | 39 | 20 | 20 | 117 | 98 |
| Cycle No | O1–D4 | O3–D6 | O4–D1 | O6–D3 |
|---|---|---|---|---|
| 1 | 39 | 78 | 59 | 20 |
| 2 | 59 | 59 | 117 | 59 |
| 3 | 20 | 78 | 98 | 59 |
| 4 | 39 | 20 | 98 | 59 |
| 5 | 39 | 59 | 0 | 137 |
| 6 | 59 | 78 | 59 | 20 |
| 7 | 98 | 39 | 20 | 0 |
| 8 | 39 | 20 | 78 | 39 |
| 9 | 78 | 59 | 98 | 0 |
| 10 | 39 | 59 | 117 | 98 |
| 11 | 39 | 0 | 78 | 20 |
| 12 | 39 | 20 | 39 | 98 |
| 13 | 0 | 39 | 59 | 39 |
| 14 | 59 | 117 | 117 | 59 |
| 15 | 39 | 39 | 117 | 39 |
| 16 | 59 | 39 | 59 | 0 |
| 17 | 59 | 117 | 117 | 20 |
| 18 | 0 | 20 | 98 | 0 |
| 19 | 98 | 20 | 39 | 0 |
| Vehicle Types | Lanes | Occupancy |
|---|---|---|
| General vehicles | All lanes | 1.5 |
| Regular buses | South bound of side road | 20.0 |
| North bound of side road | 56.5 | |
| BRT vehicles | South bound of BRT road | 30.5 |
| North bound of BRT road | 70.2 |
| Experiment No | 1 | 2 | 3 | 4 | 5 | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| TSP Strategy | FCFS | CNOB | FCFS | CNOB | FCFS | CNOB | FCFS | CNOB | VGAO-FCFS | |
| First Phase (priority phase) | Max_GreenTime | 86 | 86 | 86 | 86 | 86 | 86 | 86 | 86 | 86 |
| Min_GreenTime | 66 | 66 | 66 | 66 | 50 | 50 | 50 | 50 | 50 | |
| Amber | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | |
| All-Red | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | |
| Max_call | 7 | 7 | 7 | 7 | 7 | 7 | 7 | 7 | [3,10] | |
| Extend | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | [3,10] | |
| Duration | 15 | 15 | 15 | 15 | 15 | 15 | 15 | 15 | [3,34] | |
| Threshold_Arr[1] | --- | 4 | --- | 5 | --- | 4 | --- | 5 | ||
| Increment[1] | --- | 5 | --- | 8 | --- | 5 | --- | 8 | ||
| Second Phase (non-priority phase) | Max_GreenTime | 34 | 34 | 34 | 34 | 34 | 34 | 34 | 34 | 34 |
| Min_GreenTime | 24 | 24 | 15 | 15 | 24 | 24 | 15 | 15 | 15 | |
| Amber | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | |
| All-Red | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | |
| Threshold_Sto[1] | --- | 2 | --- | 2 | --- | 2 | --- | 2 | --- | |
| Decrement[1] | --- | 5 | --- | 10 | --- | 5 | --- | 10 | --- | |
| Third Phase (non-priority phase) | Max_GreenTime | 40 | 40 | 40 | 40 | 40 | 40 | 40 | 40 | 40 |
| Min_GreenTime | 30 | 30 | 22 | 22 | 30 | 30 | 22 | 22 | 22 | |
| Amber | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | |
| All-Red | 8 | 8 | 8 | 8 | 8 | 8 | 8 | 8 | 8 | |
| Threshold_Sto[2] | --- | 3 | --- | 3 | --- | 3 | --- | 3 | --- | |
| Decrement[2] | --- | 4 | --- | 6 | --- | 4 | --- | 6 | --- | |
| Experiment No | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| Average delay per person (s) | 5.42 × 10−6 | 3.42 × 10−5 | 8.87 × 10−10 | 7.11 × 10−7 |
| Average vehicle delay(s) | 0.40304364 | 1.23 × 10−4 | 0.23675712 | 2.18 × 10−4 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lian, P.; Wu, Y.; Li, Z.; Keel, J.; Guo, J.; Kang, Y. An Improved Transit Signal Priority Strategy for Real-World Signal Controllers that Considers the Number of Bus Arrivals. Sustainability 2020, 12, 287. https://doi.org/10.3390/su12010287
Lian P, Wu Y, Li Z, Keel J, Guo J, Kang Y. An Improved Transit Signal Priority Strategy for Real-World Signal Controllers that Considers the Number of Bus Arrivals. Sustainability. 2020; 12(1):287. https://doi.org/10.3390/su12010287
Chicago/Turabian StyleLian, Peikun, Yiyuan Wu, Zhenlong Li, Jack Keel, Jiangang Guo, and Yaling Kang. 2020. "An Improved Transit Signal Priority Strategy for Real-World Signal Controllers that Considers the Number of Bus Arrivals" Sustainability 12, no. 1: 287. https://doi.org/10.3390/su12010287
APA StyleLian, P., Wu, Y., Li, Z., Keel, J., Guo, J., & Kang, Y. (2020). An Improved Transit Signal Priority Strategy for Real-World Signal Controllers that Considers the Number of Bus Arrivals. Sustainability, 12(1), 287. https://doi.org/10.3390/su12010287