Distributed Control Strategy of the Leader-Follower for Offshore Wind Farms under Fault Conditions



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Model and Theoretical Foundation
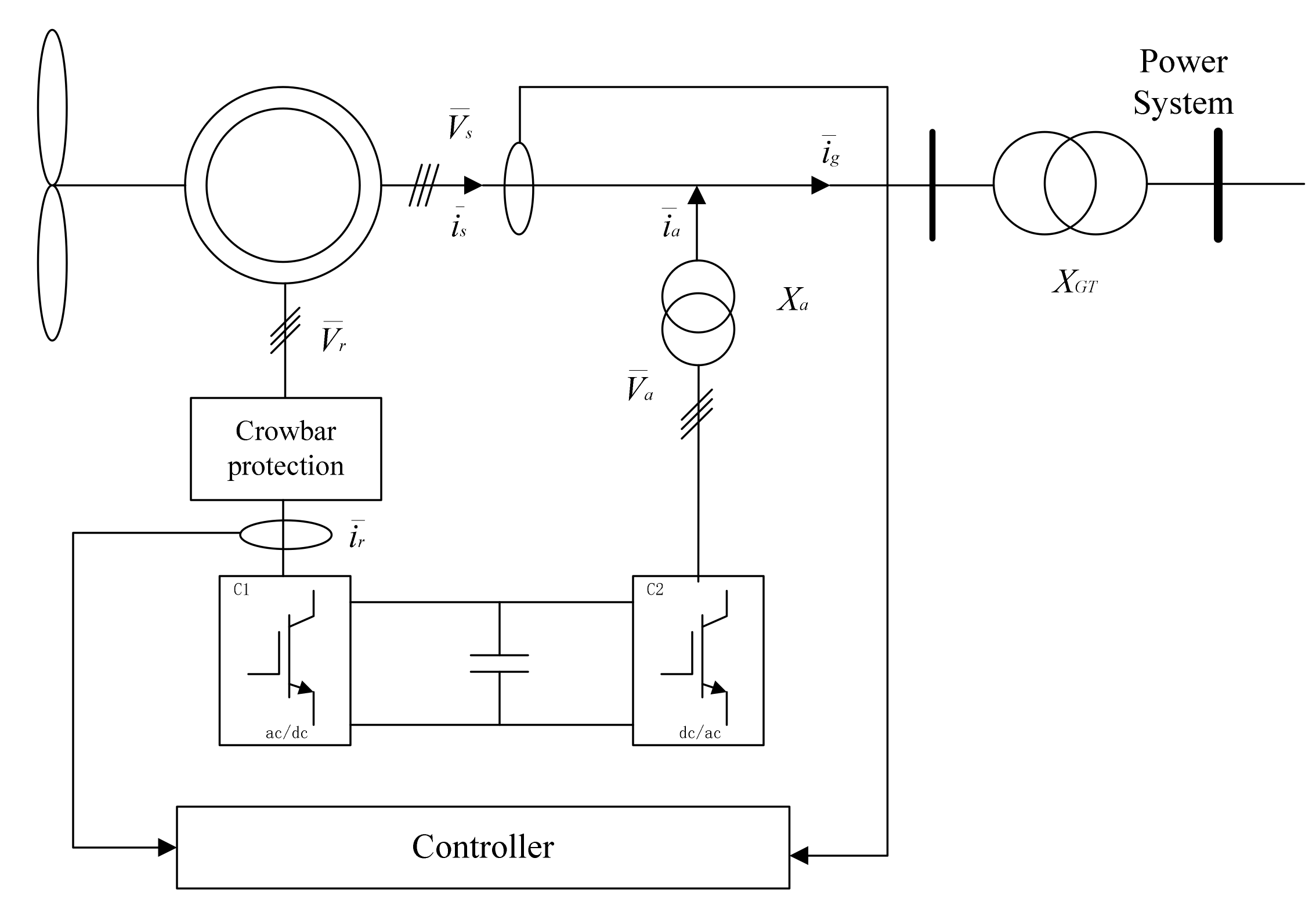
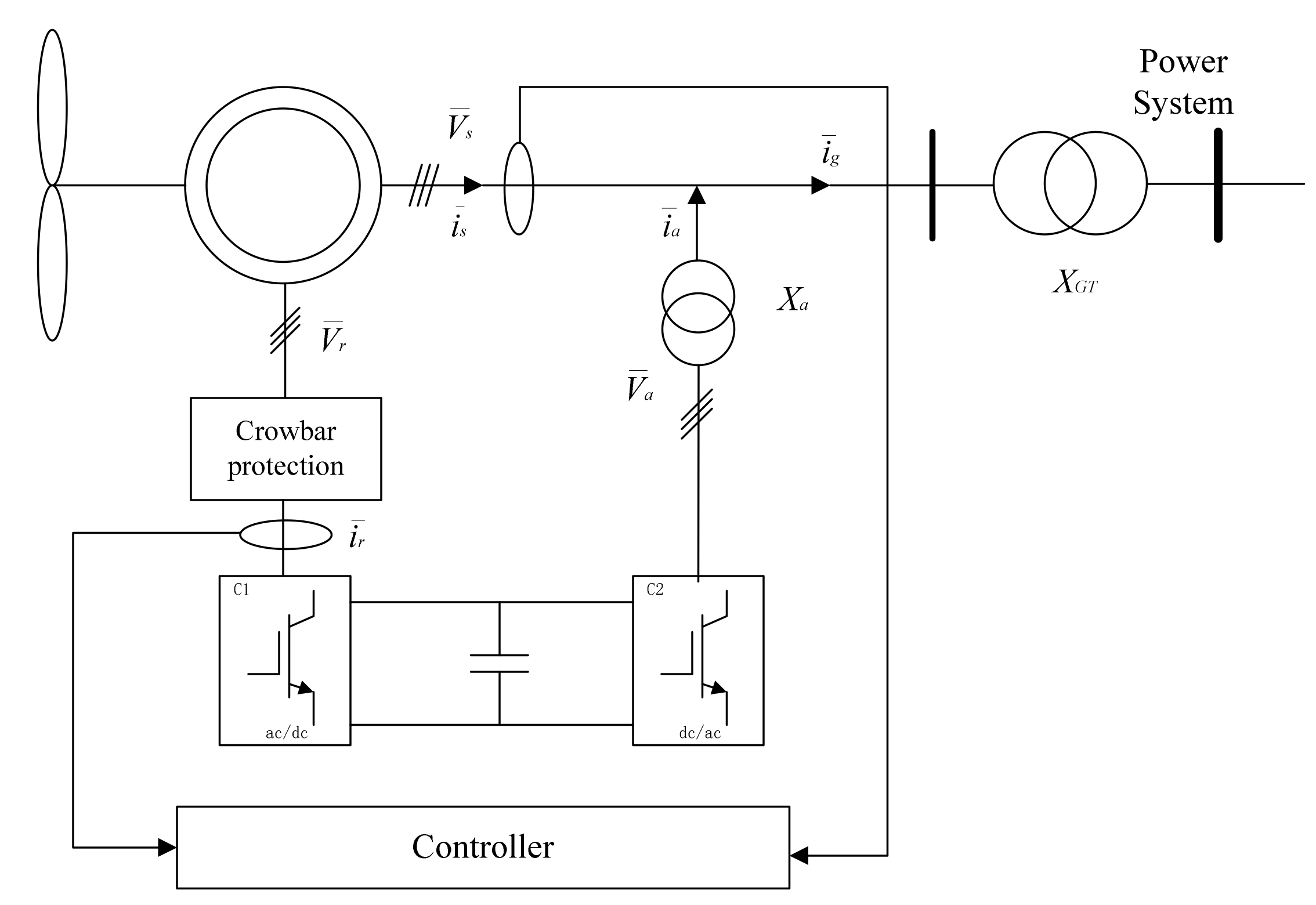
2.1. Single-Machine Hamiltonian Realization of Doubly Fed Wind Turbine
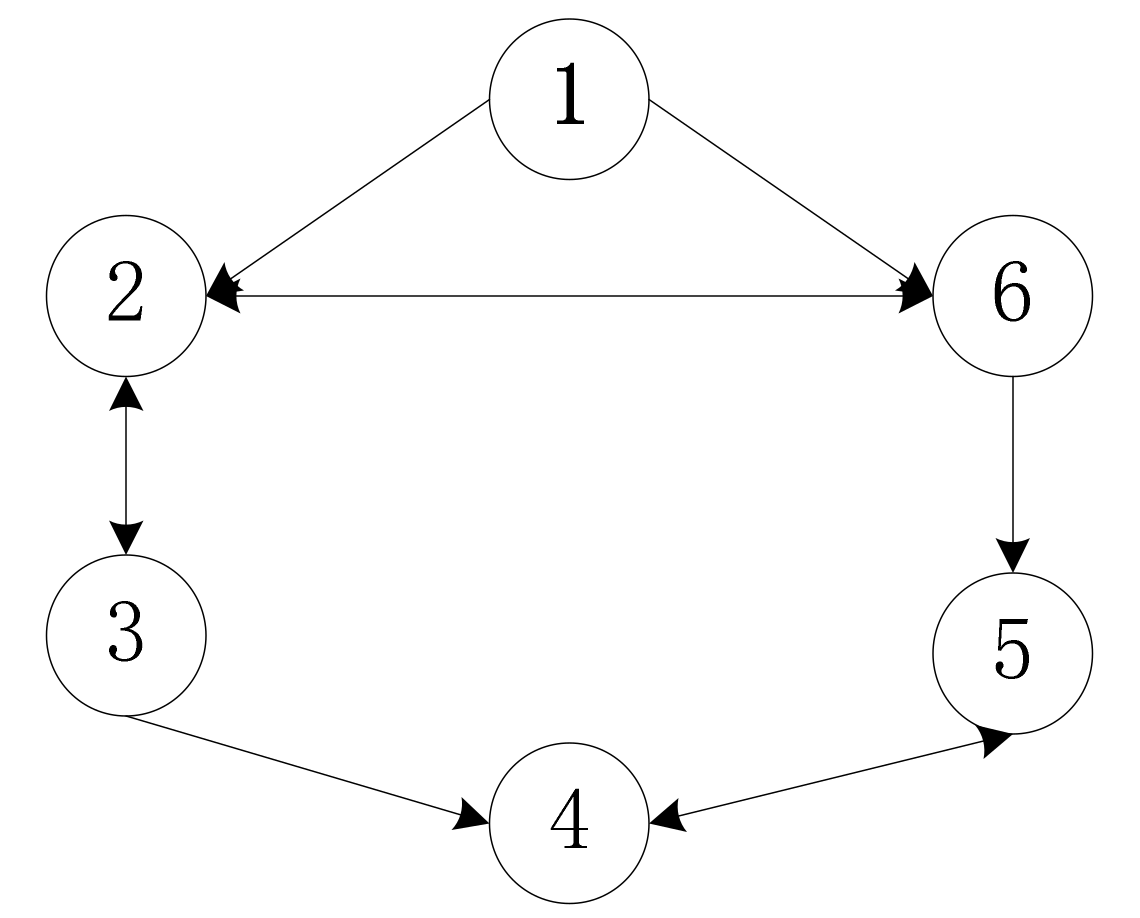
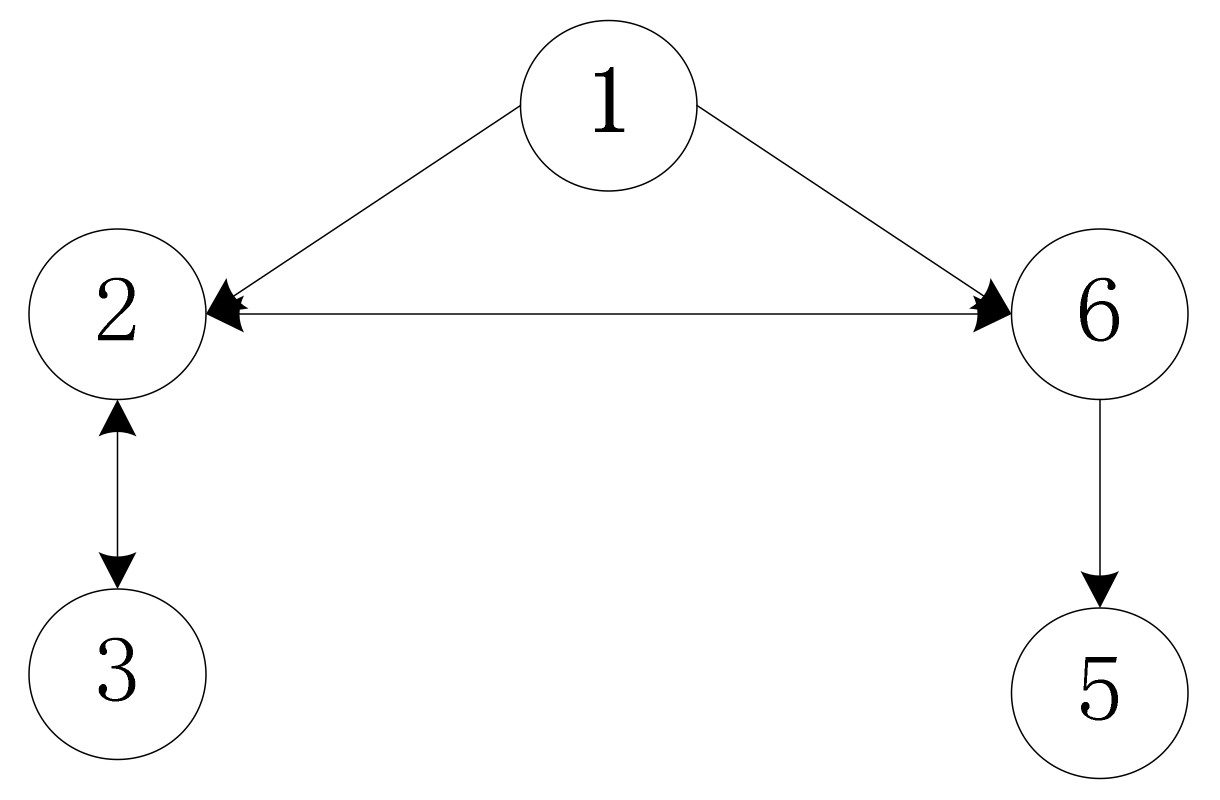
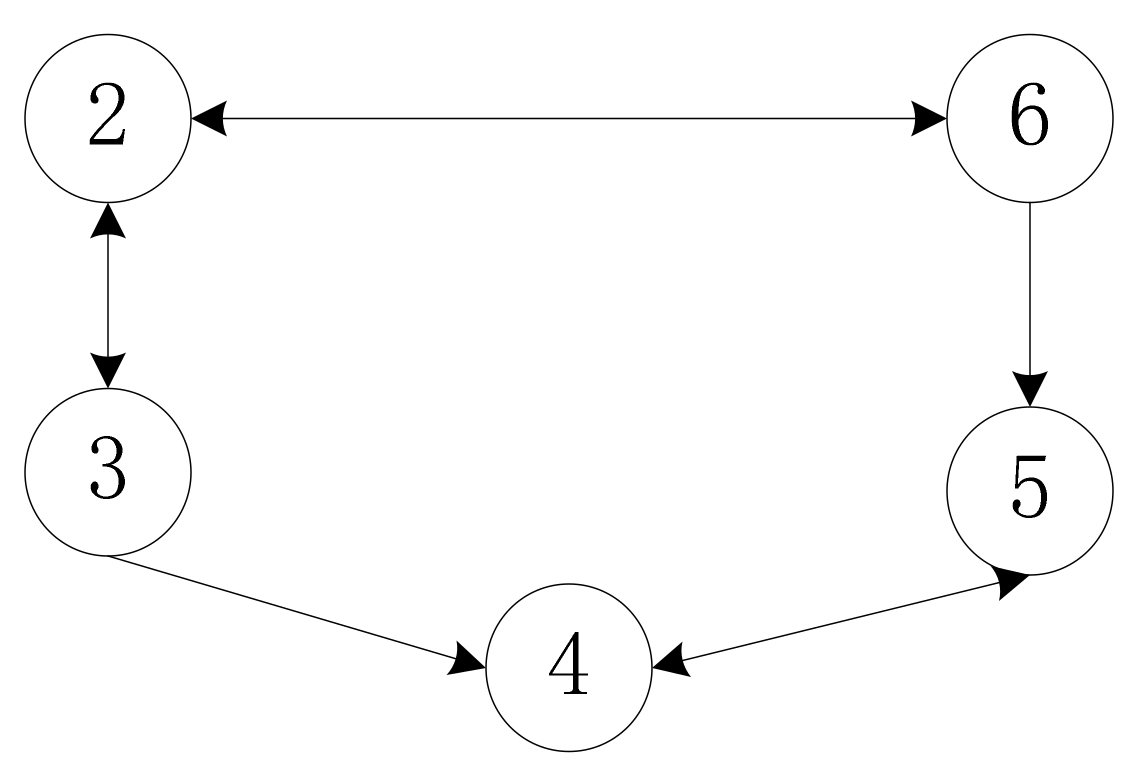
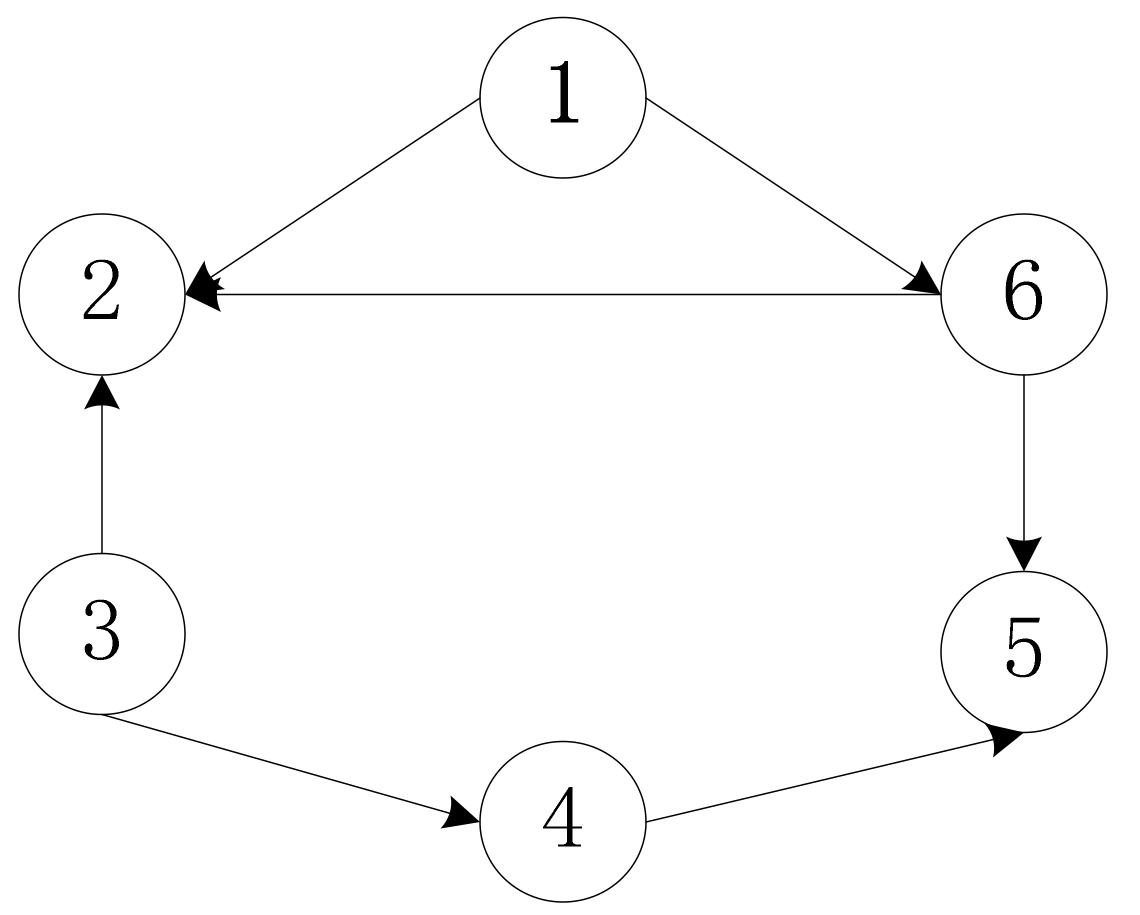
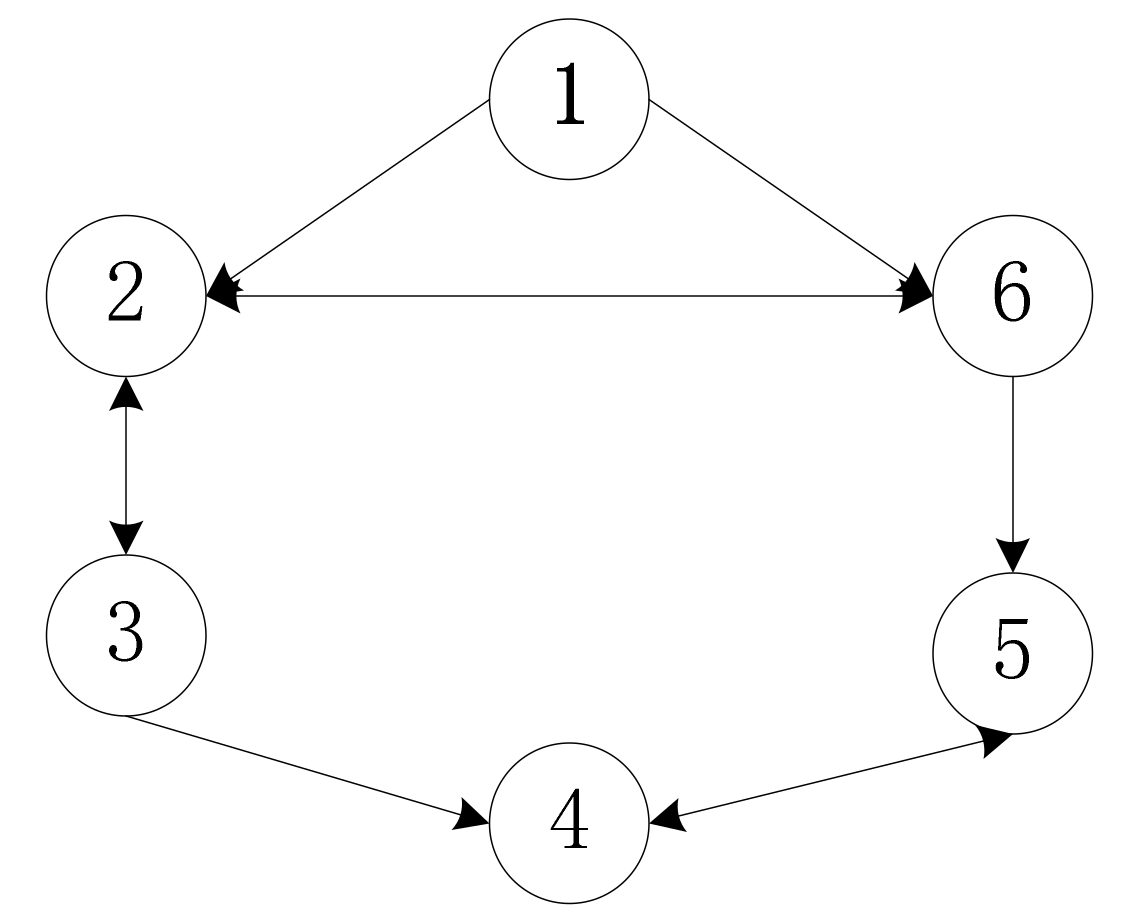
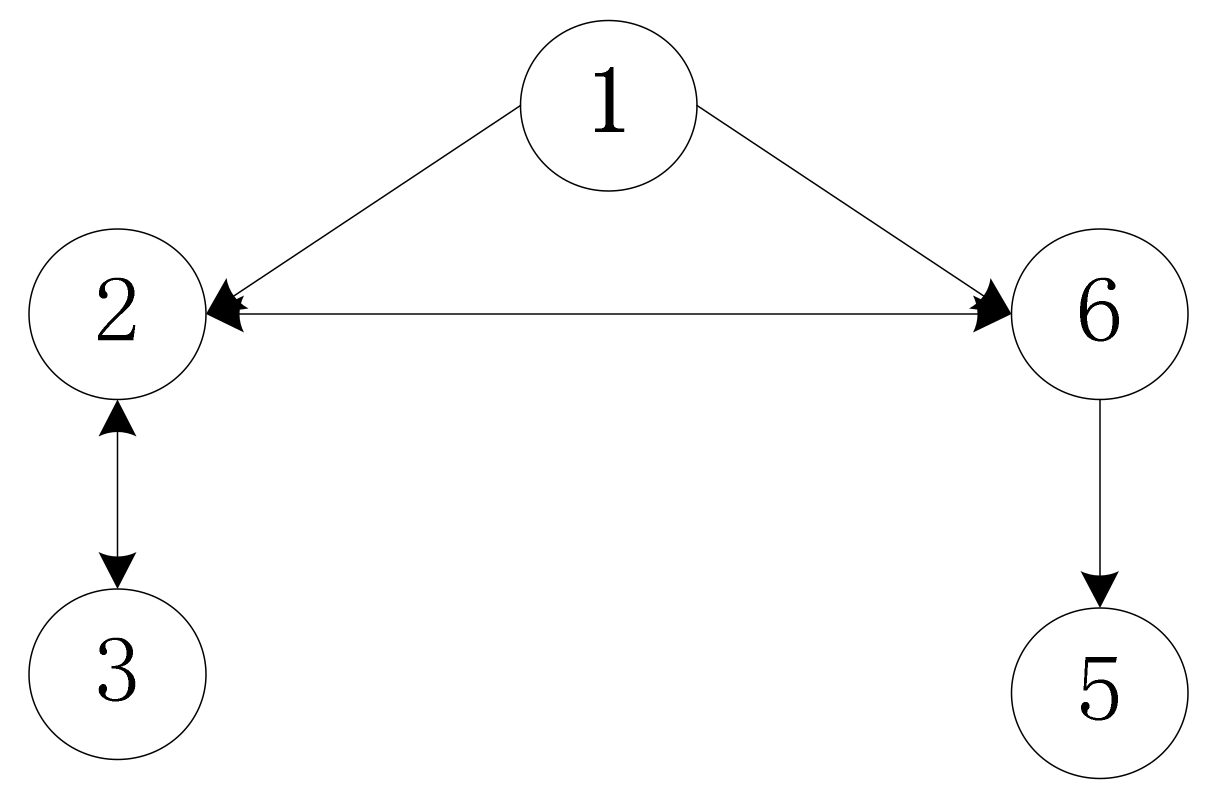
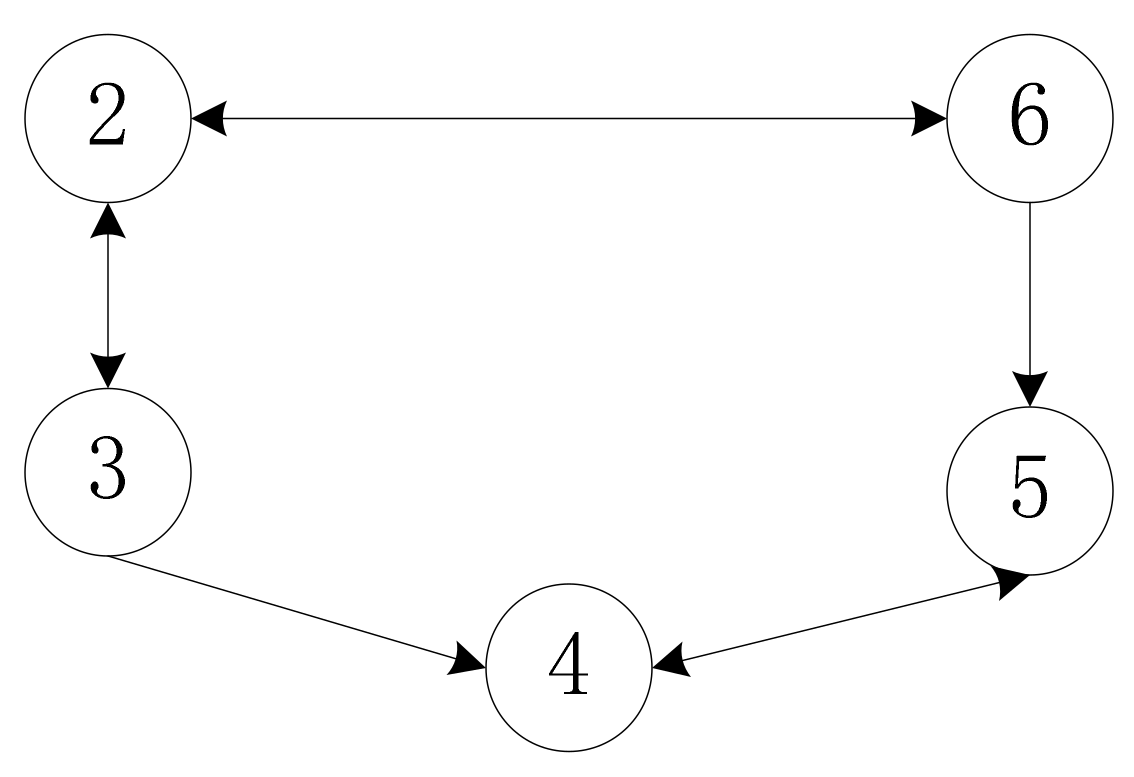
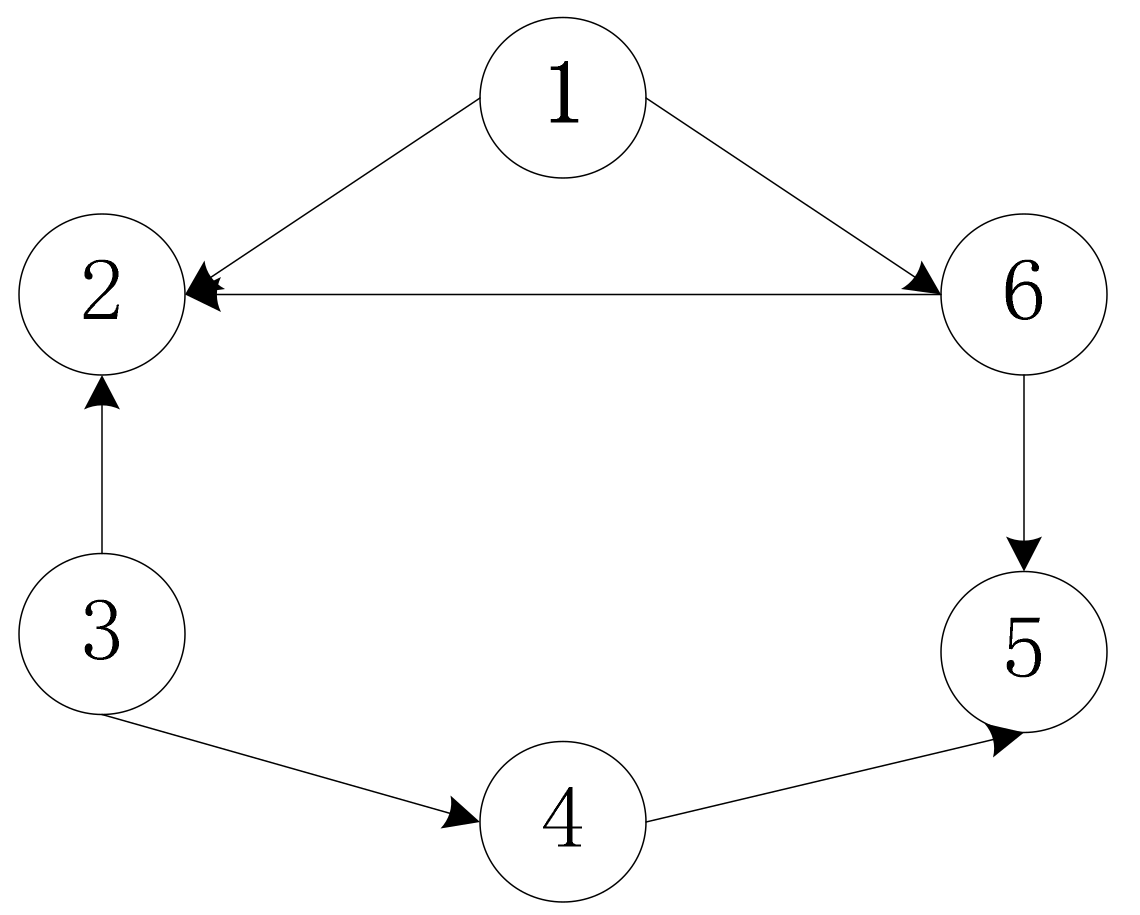
2.2. Conceptions of Graph Theory
- represents the unidirectional neighbor node of the node;
- represents the bidirectional neighbor node of the node;
- represents the potential neighbor node of the node.
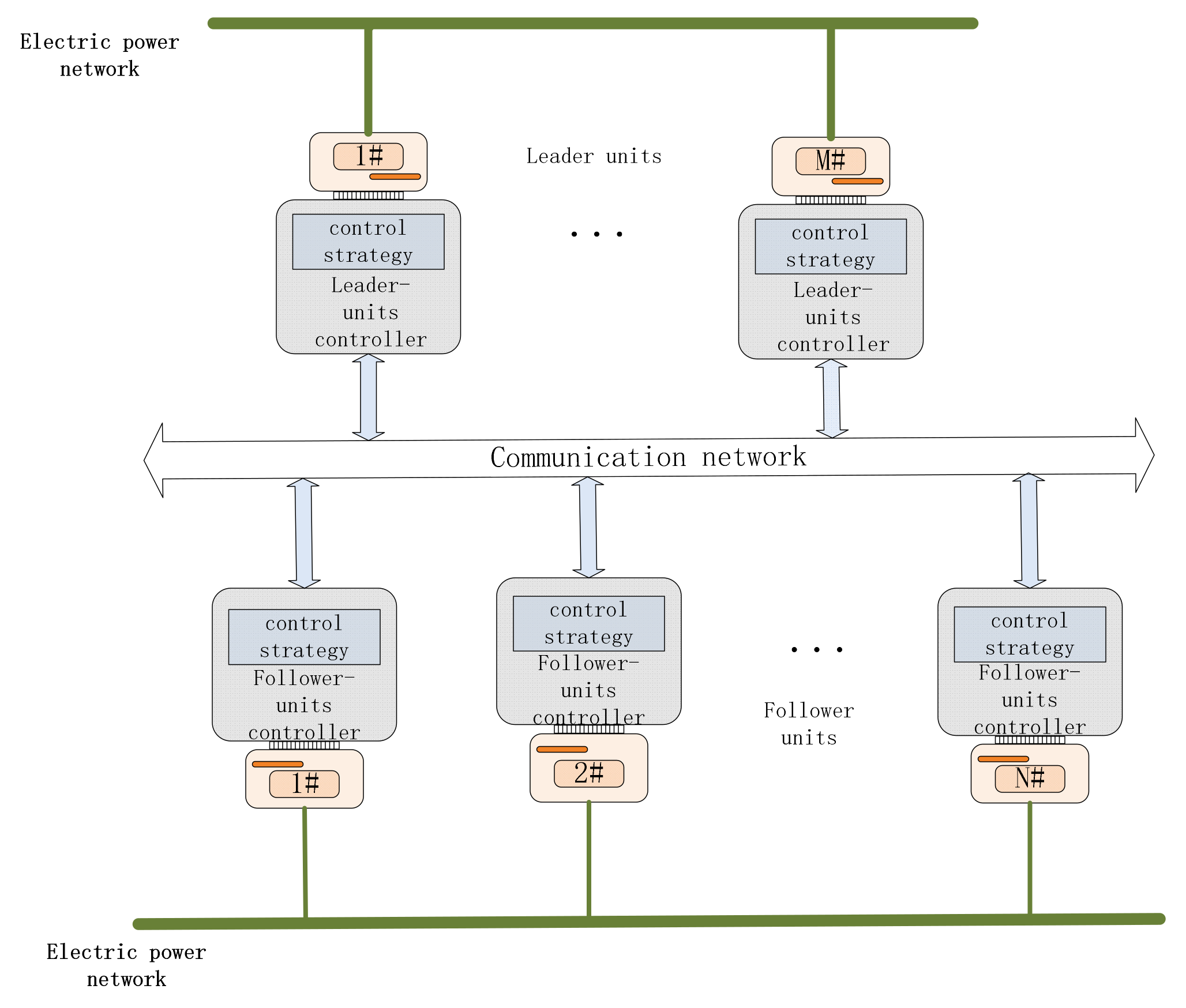
3. Leader-Follower Distributed Control Strategy
3.1. Control Strategy of Leader
3.2. Control Strategy of the Follower Unit
3.3. Analysis of the Control Strategy under Fault Conditions
4. Leader-Follower Distributed Control Strategy under a Communication Fault Condition
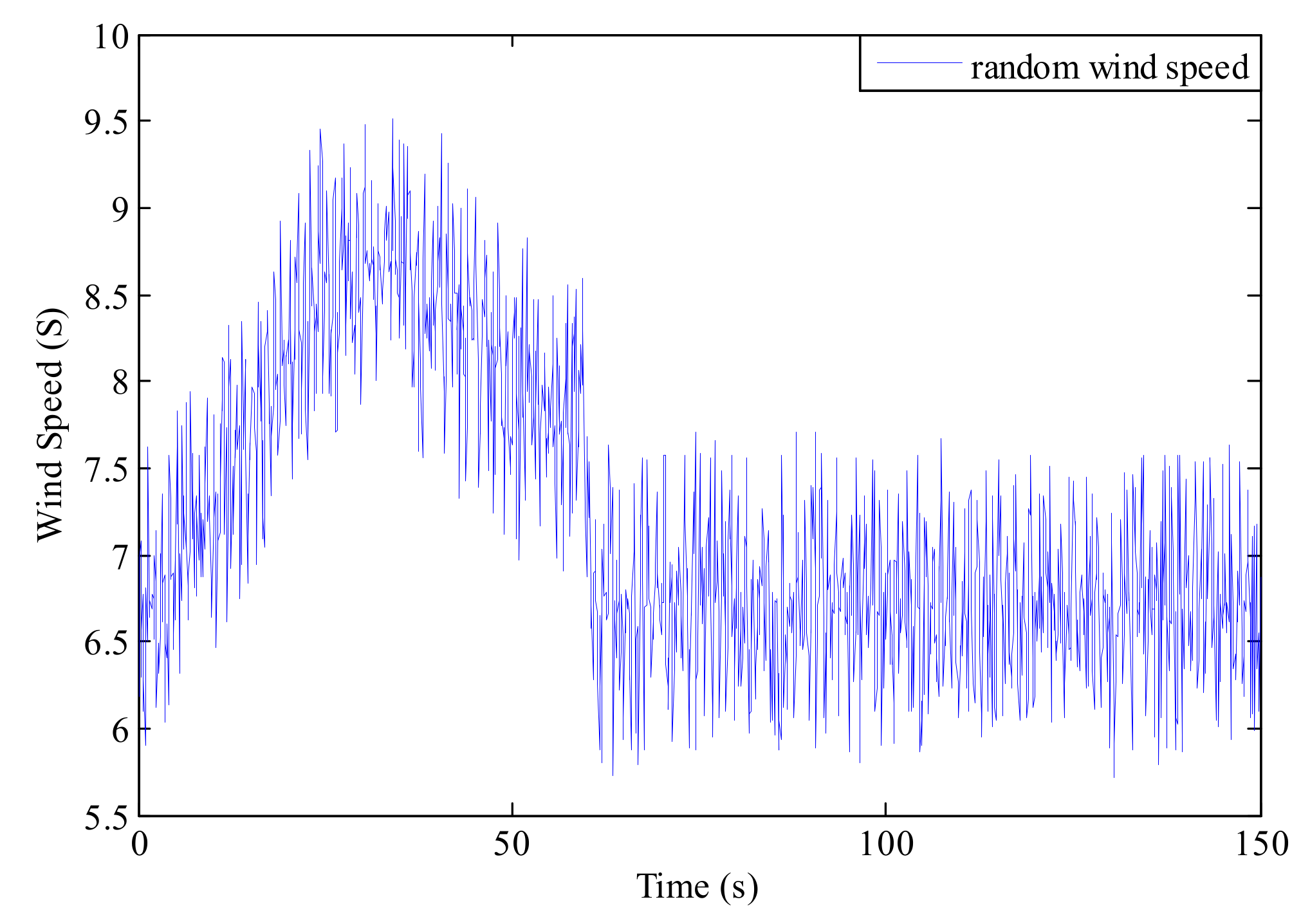
5. Simulation Verification
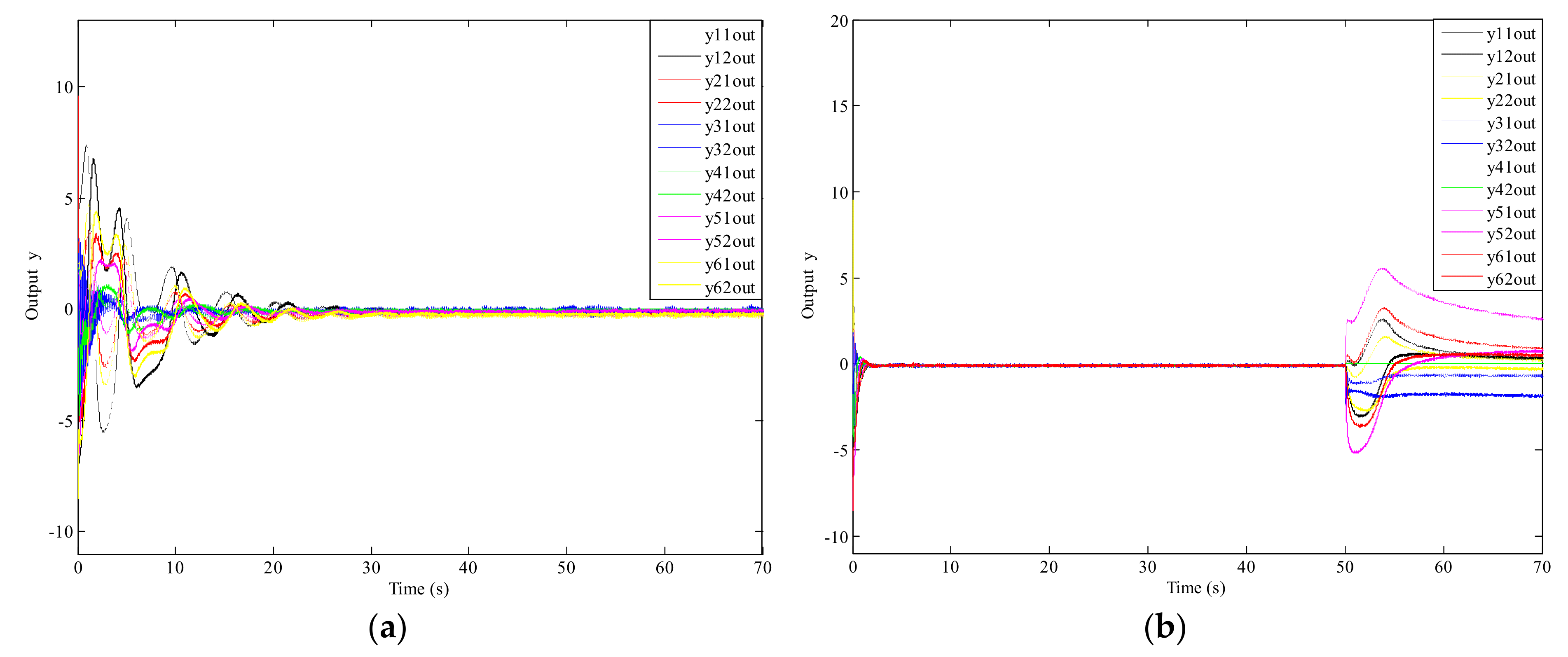
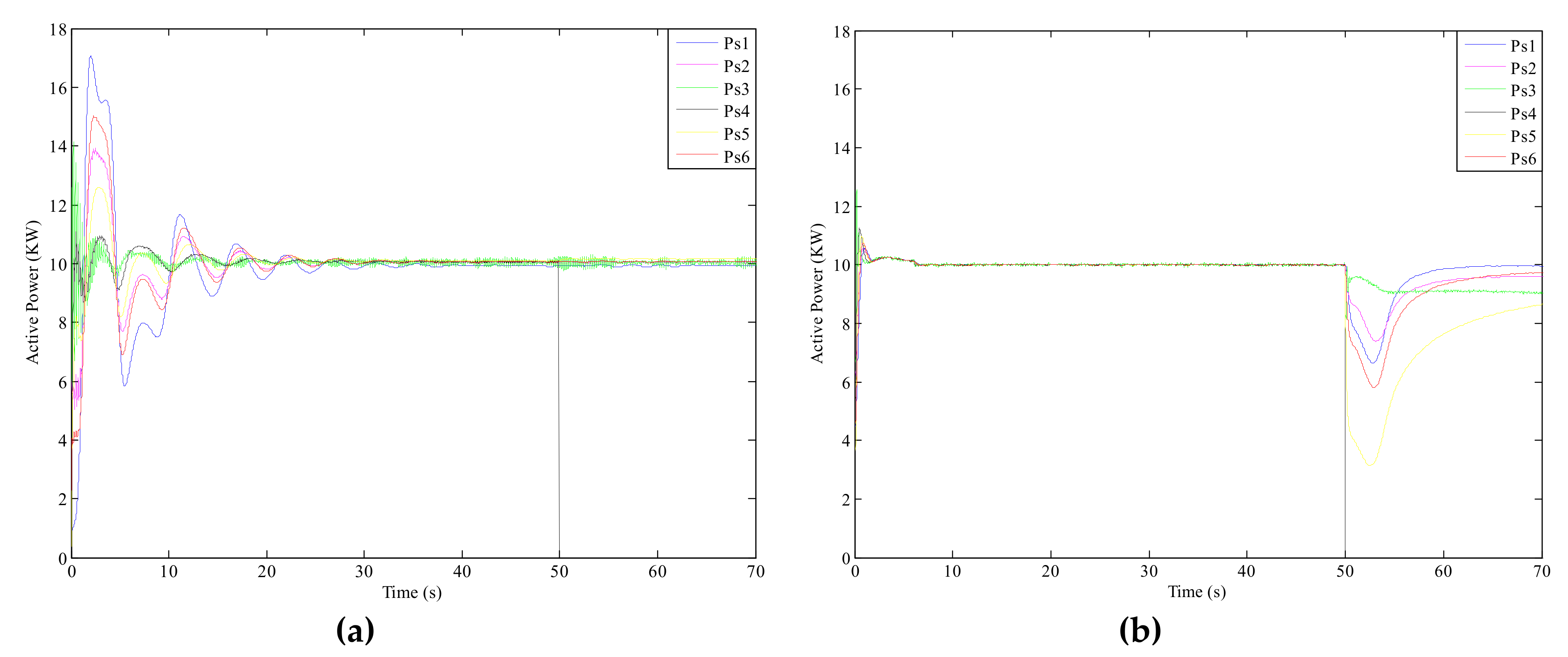
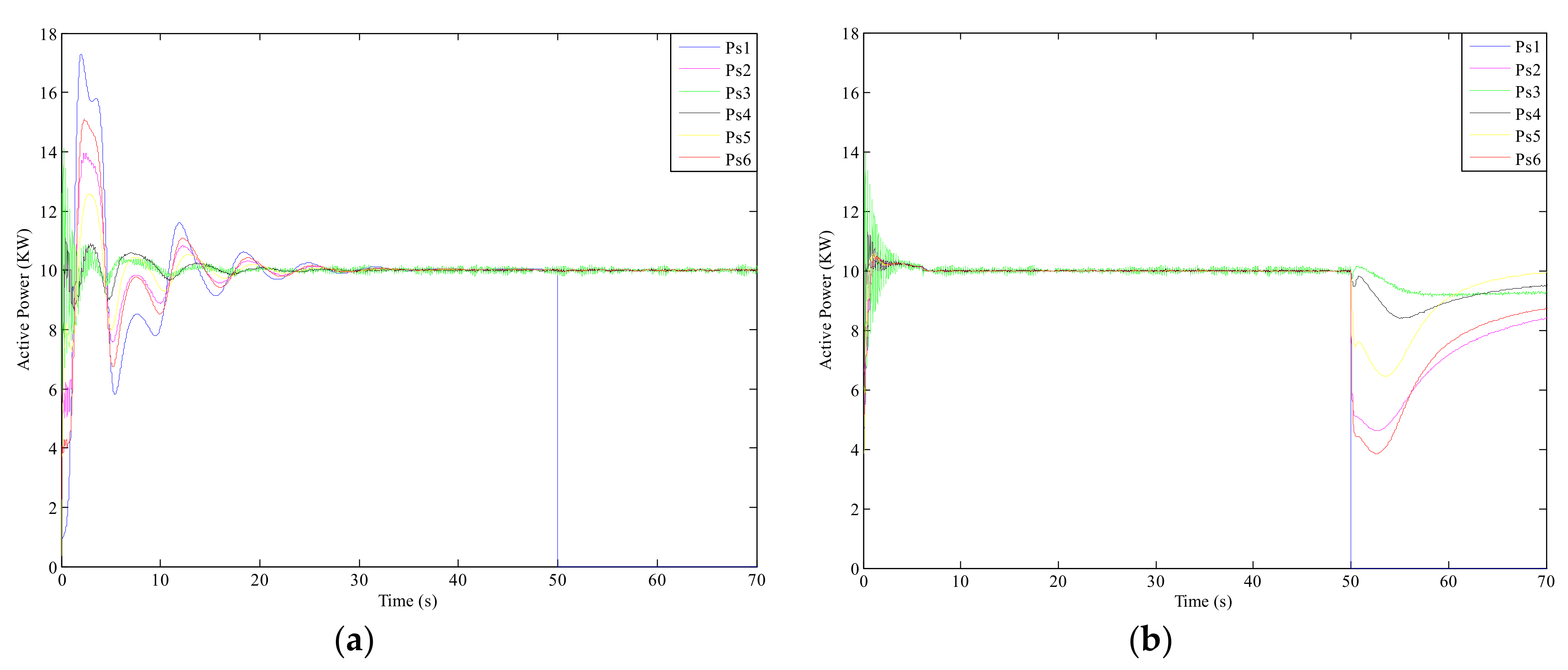
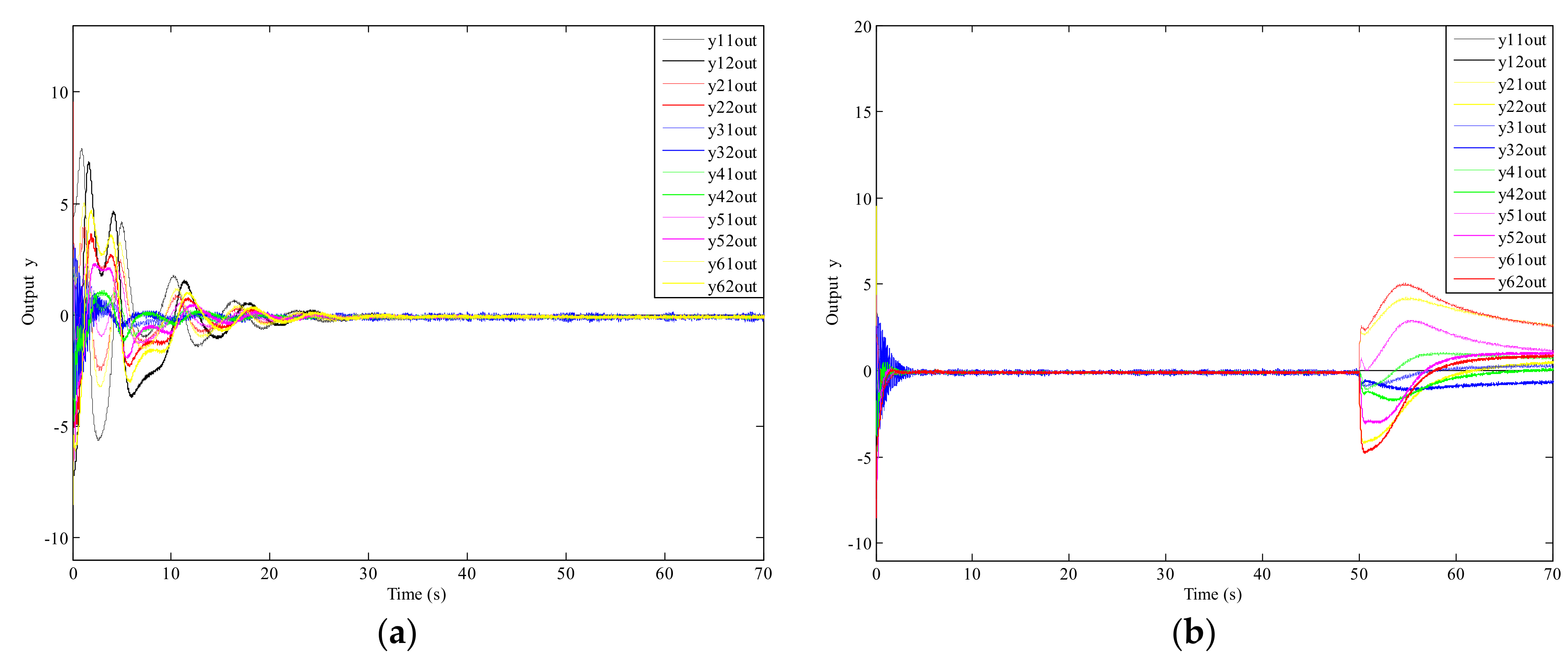
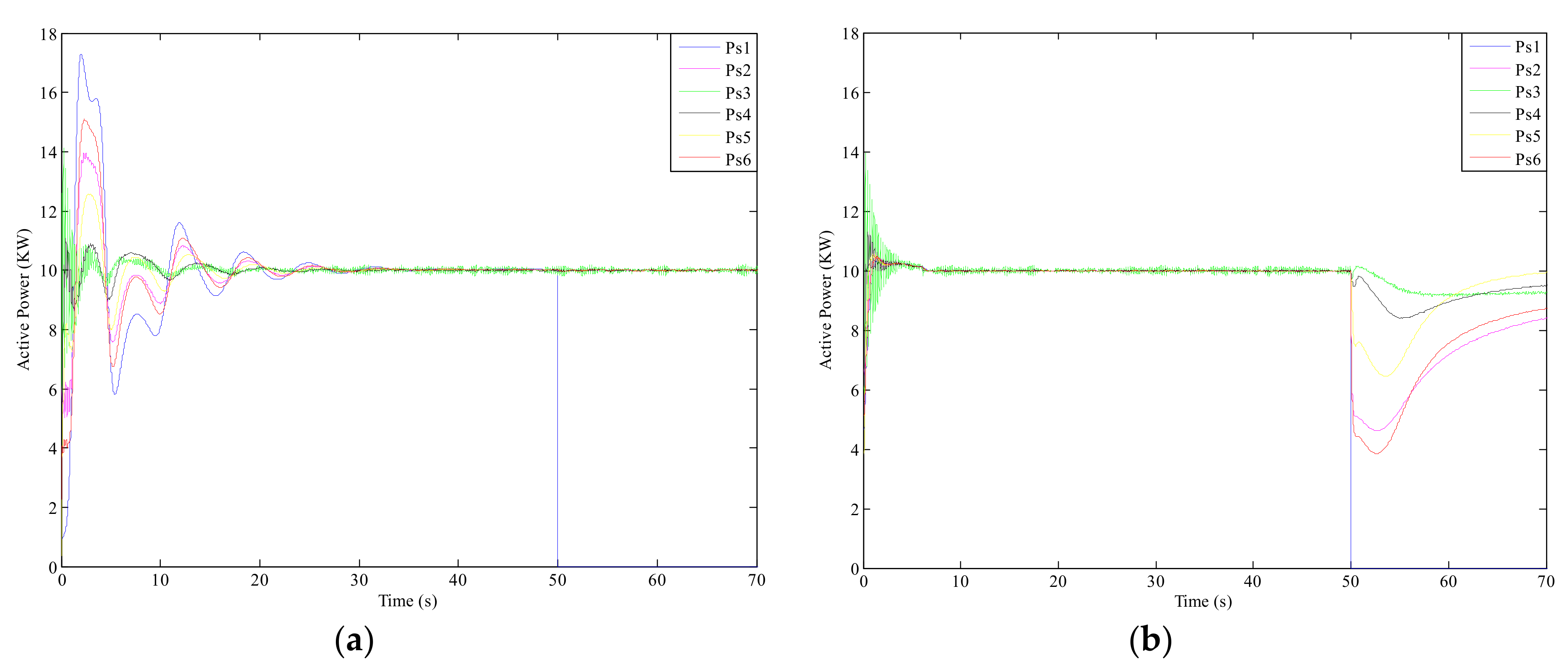
5.1. The Leader-Follower Control Strategy under Follower Unit Fault
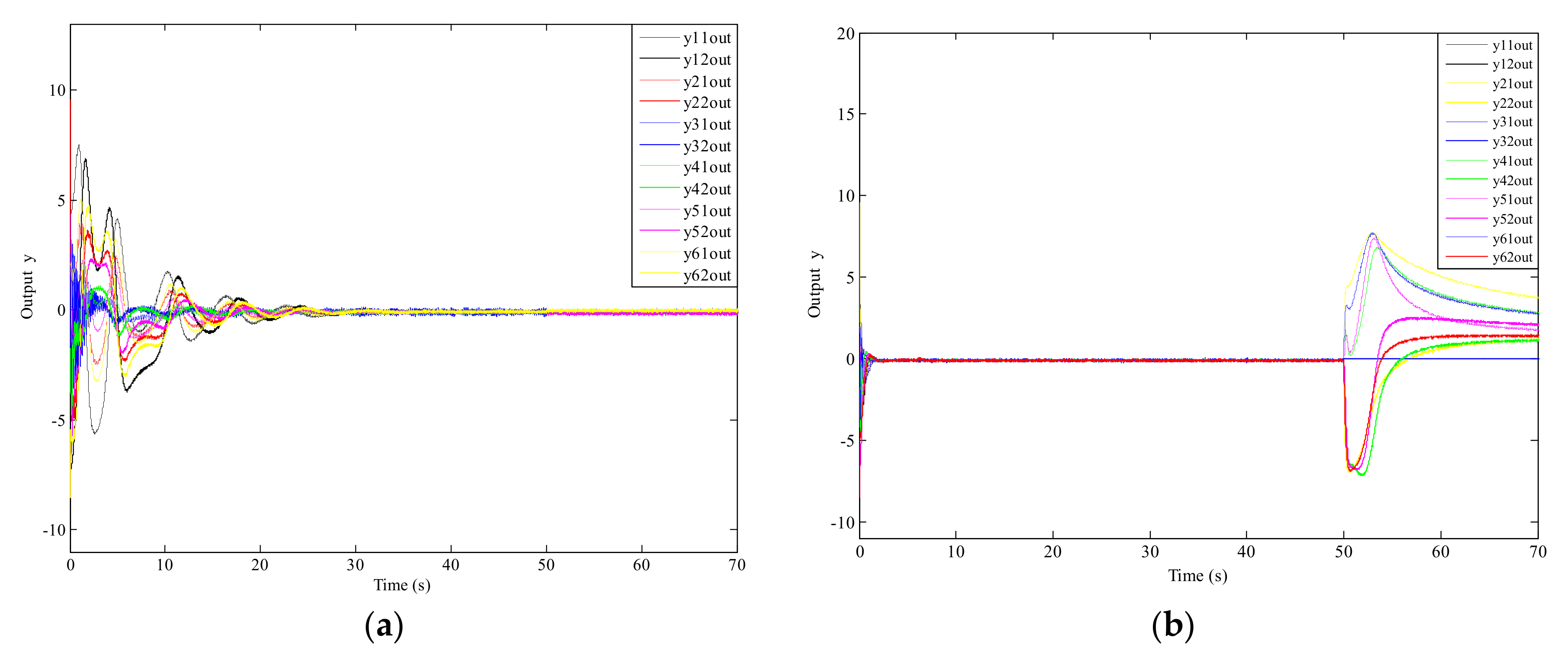
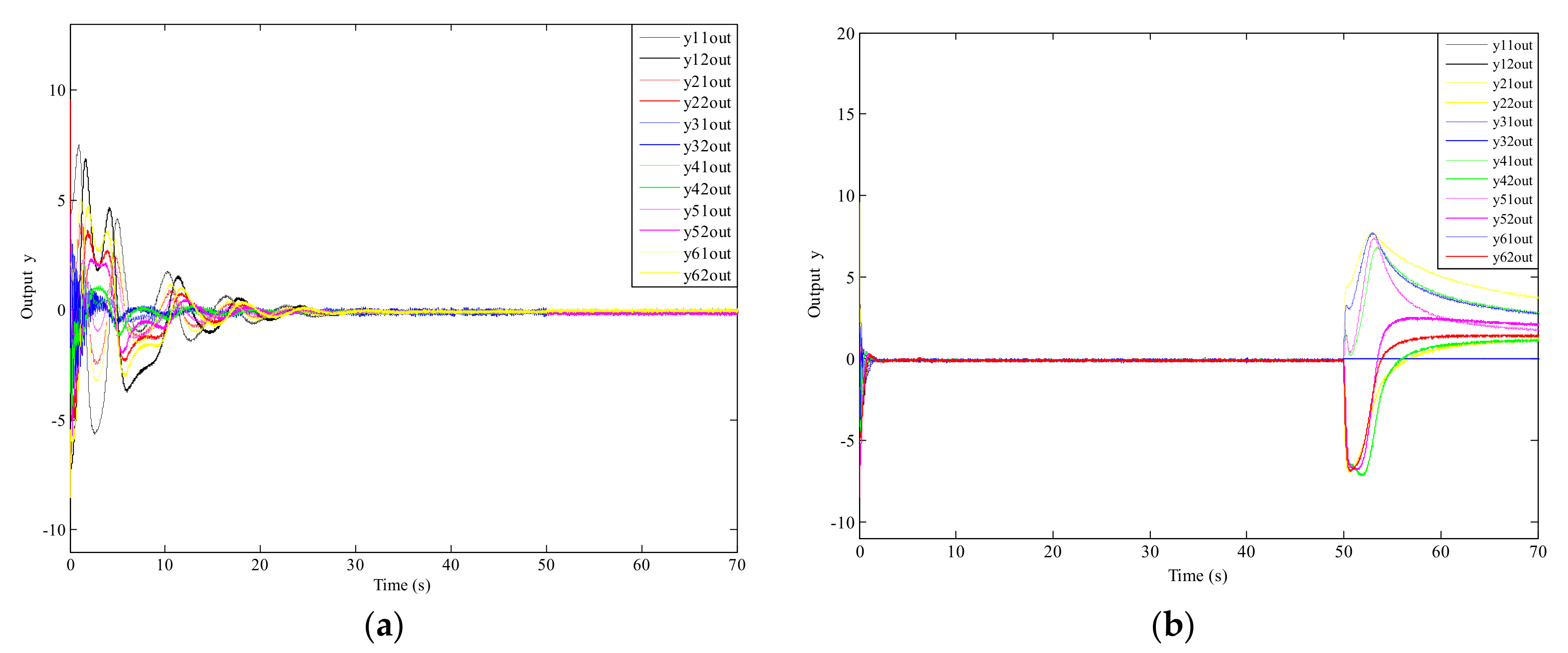
5.2. The Leader-Follower Control Strategy under a Leader Unit Fault
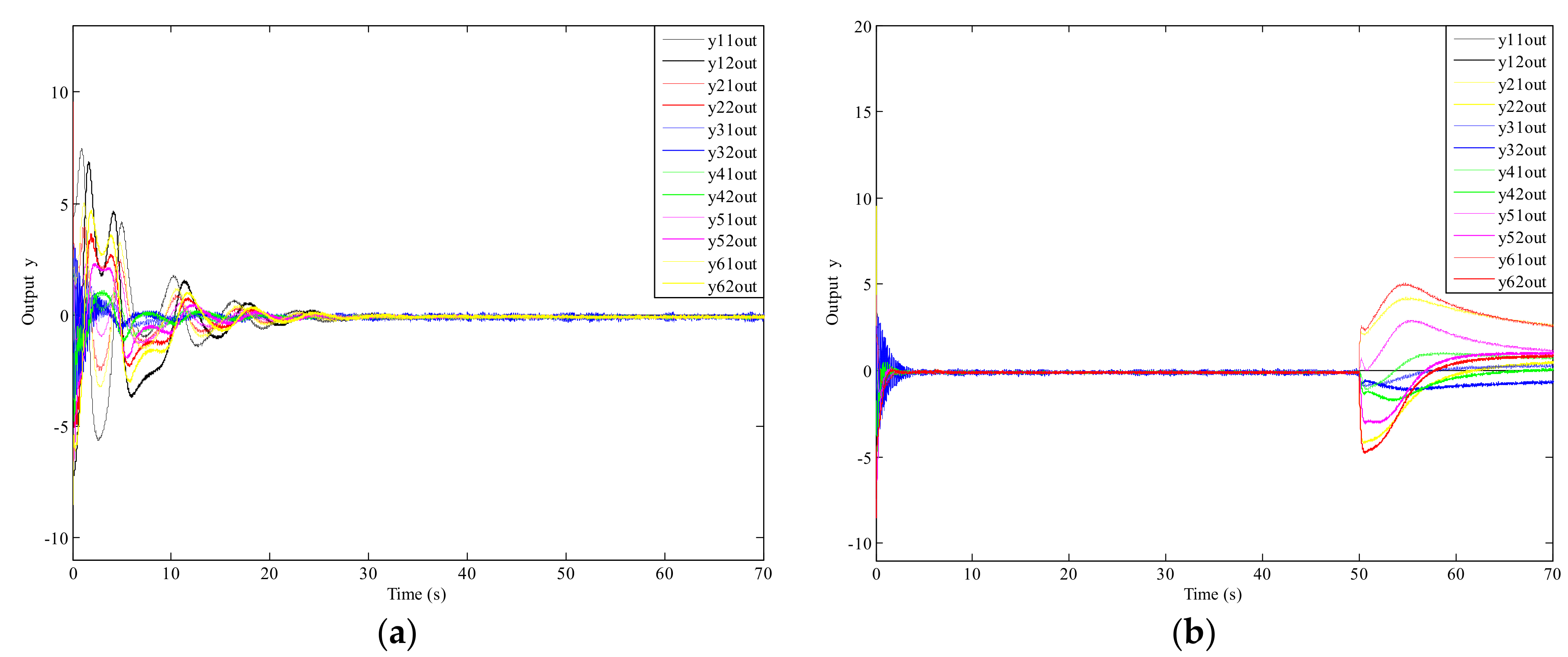
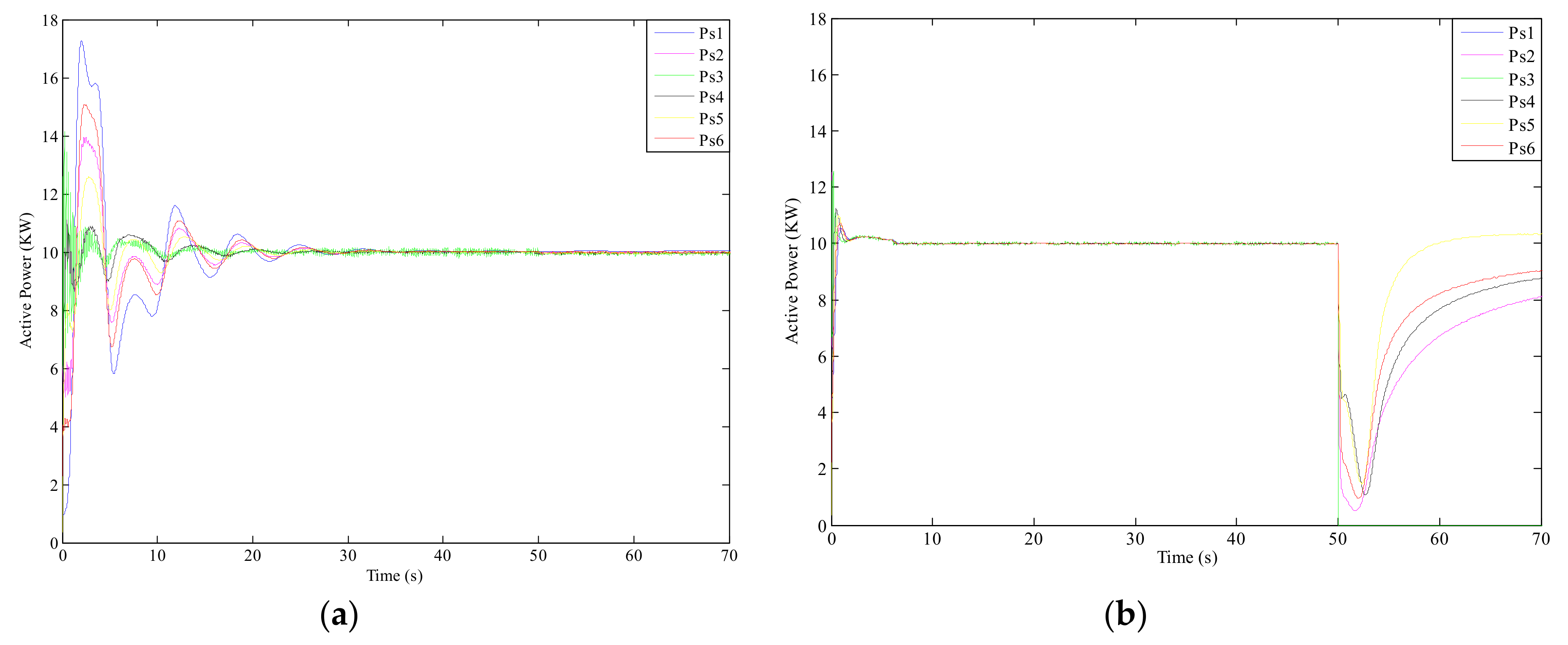
5.3. The Leader-Follower Control Strategy under a Communication Failure
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. List of Symbols
| ,, | stator, rotor, and generated current |
| , | stator and rotor voltage |
| , | stator side converter voltage and current |
| , | transformer reactance |
| rotor resistance | |
| synchronous angle speed | |
| mutual inductance | |
| , | stator and rotor inductance |
| rotor slip rate | |
| , | dq-axis stator current |
| , | stator transient or short circuit reactance and open circuit reactance |
| , | dq-axis transient reactance voltages |
| , | dq-axis rotor voltage |
| inertia constant | |
| mechanical power | |
| stator active power | |
| stator reactive power |
References
- Van Hertem, D.; Gomis-Bellmunt, O.; Liang, J. HVDC Grids: For Offshore and Supergrid of the Future; Wiley-IEEE Press: Hoboken, NJ, USA, 2016. [Google Scholar]
- Wu, Q.W.; Sun, Y.Z. Modeling and Modern Control of Wind Power; Wiley-IEEE Press: Hoboken, NJ, USA, 2018. [Google Scholar]
- Sakamuri, J.N.; Rather, Z.H.; Rimez, J.; Altin, M.; Goksu, O.; Cutululis, N.A. Coordinated voltage control in offshore HVDC connected cluster of wind power plants. IEEE Trans. Sustain. Energy 2016, 7, 1592–1601. [Google Scholar] [CrossRef]
- Lu, T.G.; Wang, Z.Y.; Ai, Q.; Lee, W.J. Interactive model for energy management of clustered microgrids. IEEE Trans. Ind. Appl. 2017, 53, 1739–1750. [Google Scholar] [CrossRef]
- Ackermann, T. Wind Power in Power Systems; John Wiley & Sons: Chichester, UK, 2005. [Google Scholar]
- Xu, Y.L.; Zhang, W.; Liu, W.X.; Wang, X.; Ferrese, F.; Zang, C.Z.; Yu, H.B. Distributed subgradient- based coordination of multiple renewable generators in a microgrid. IEEE Trans. Power Syst. 2014, 29, 23–32. [Google Scholar] [CrossRef]
- Gao, X.D.; Meng, K.; Dong, Z.Y.; Wang, D.X.; EI Moursi, M.S.; Wong, K.P. Cooperation-driven distributed control scheme for large-scale wind farm active power regulation. IEEE Trans. Energy Convers. 2017, 32, 1240–1250. [Google Scholar] [CrossRef]
- Yang, S.P.; Tan, S.C.; Xu, J.X. Consensus based approach for economic dispatch problem in a smart grid. IEEE Trans. Power Syst. 2013, 28, 4416–4426. [Google Scholar] [CrossRef]
- Zhang, Z.; Chow, M.Y. Convergence analysis of the incremental cost consensus algorithm under different communication network topologies in a smart grid. IEEE Trans. Power Syst. 2012, 27, 1761–1768. [Google Scholar] [CrossRef]
- Zhang, X.J.; Karady, G.G.; Ariaratnam, S.T. Optimal Allocation of CHP-Based Distributed Generation on Urban Energy Distribution Networks. IEEE Trans. Sustain. Energy 2014, 5, 246–253. [Google Scholar] [CrossRef]
- Ajorlou, A.; Aghdam, A.G. Connectivity Preservation in Nonholonomic Multi-Agent Systems: A Bounded Distributed Control Strategy. IEEE Trans. Autom. Control 2013, 58, 2366–2371. [Google Scholar] [CrossRef]
- Zhao, C.C.; He, J.P.; Cheng, P.; Chen, J.M. Consensus-based energy management in smart grid with transmission losses and directed communication. IEEE Trans. Smart Grid 2017, 8, 2049–2061. [Google Scholar] [CrossRef]
- Wang, Z.X.; Jiang, C.W.; Ai, Q.; Wang, C.M. The key technology of offshore wind farm and its new development in China. Renew. Sustain. Energy Rev. 2009, 13, 216–222. [Google Scholar]
- Kheshti, M.; Kang, X.N.; Song, G.B.; Jiao, Z.B. Modeling and Fault Analysis of Doubly Fed Induction Generators for Gansu Wind Farm Application. Can. J. Electr. Comput. Eng. 2015, 38, 52–64. [Google Scholar] [CrossRef]
- Jia, K.; Chen, R.; Xuan, Z.W.; Yang, Z.; Fang, Y.; Bi, T.S. Fault characteristics and protection adaptability analysis in VSC-HVDC-connected offshore wind farm integration system. IET Renew. Power Gener. 2018, 12, 1547–1554. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R.W. Distributed Consensus in Multi-Vehicle Cooperation Control; Springer-Verlag: London, UK, 2008. [Google Scholar]
- Ortega, R.; van der Schaft, A.J.; Maschke, B.; Escobar, G. Interconnection and damping assignment passivity-based control of port-controlled Hamiltonian systems. Automatica 2002, 38, 585–596. [Google Scholar] [CrossRef]
- Wang, Y.Z. Generalized Controlled Hamiltonian System: Realization, Control and Applications; Science Press: Beijing, China, 2007. [Google Scholar]
- Li, C.S.; Wang, Y.Z. Protocol design for output consensus of port-controlled Hamiltonian multi-agent systems. Acta Autom. Sin. 2014, 40, 415–422. [Google Scholar] [CrossRef]
- Muller, S.; Deicke, M.; De Doncker, R.W. Doubly fed induction generator systems for wind turbines. IEEE Ind. Appl. Mag. 2002, 8, 26–33. [Google Scholar] [CrossRef]
- Ekanayake, J.B.; Holdsworth, L.; Jenkins, N. Comparison of 5th order and 3rd order machine models for doubly fed induction generator (DFIG) wind turbines. Electr. Power Syst. Res. 2003, 67, 207–215. [Google Scholar] [CrossRef]
- Wu, F.; Zhang, X.P.; Ju, P.; Sterling, M.J.H. Decentralized nonlinear control of wind turbine with doubly fed induction generator. IEEE Trans. Power Syst. 2008, 23, 613–621. [Google Scholar]
- Wang, B.; Tian, M.; Lin, T.J.; Hu, Y.L. Distributed complementary control research of wind turbines in two offshore wind farms. Sustainability 2018, 10, 553. [Google Scholar] [CrossRef]
- Mesbahi, M.; Egerstedt, M. Graph Theoretic Methods in Multiagent Networks; Princeton University Press: Princeton, NJ, USA, 2010. [Google Scholar]
- Badihi, H.; Zhang, Y.M.; Hong, H. Wind Turbine Fault Diagnosis and Fault-Tolerant Torque Load Control Against Actuator Faults. IEEE Trans. Control Syst. Technol. 2015, 23, 1351–1372. [Google Scholar] [CrossRef]
- Blesa, J.; Jiménez, P.; Rotondo, D.; Nejjari, F.; Puig, V. An Interval NLPV Parity Equations Approach for Fault Detection and Isolation of a Wind Farm. IEEE Trans. Ind. Electron. 2015, 62, 3794–3805. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Wang, B.; Wu, Q.X.; Tian, M.; Hu, Q.Y. Distributed coordinated control of offshore doubly fed wind turbine groups based on the Hamiltonian energy method. Sustainability 2017, 9, 1448. [Google Scholar] [CrossRef]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, B.; Tang, Z.; Gao, X.; Liu, W.; Chen, X. Distributed Control Strategy of the Leader-Follower for Offshore Wind Farms under Fault Conditions. Sustainability 2019, 11, 2290. https://doi.org/10.3390/su11082290
Wang B, Tang Z, Gao X, Liu W, Chen X. Distributed Control Strategy of the Leader-Follower for Offshore Wind Farms under Fault Conditions. Sustainability. 2019; 11(8):2290. https://doi.org/10.3390/su11082290
Chicago/Turabian StyleWang, Bing, Zhen Tang, Xiang Gao, Weiyang Liu, and Xianhui Chen. 2019. "Distributed Control Strategy of the Leader-Follower for Offshore Wind Farms under Fault Conditions" Sustainability 11, no. 8: 2290. https://doi.org/10.3390/su11082290
APA StyleWang, B., Tang, Z., Gao, X., Liu, W., & Chen, X. (2019). Distributed Control Strategy of the Leader-Follower for Offshore Wind Farms under Fault Conditions. Sustainability, 11(8), 2290. https://doi.org/10.3390/su11082290