Profiling the Instantaneous Power Consumption of Electric Machinery in Agricultural Environments: An Algebraic Approach


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
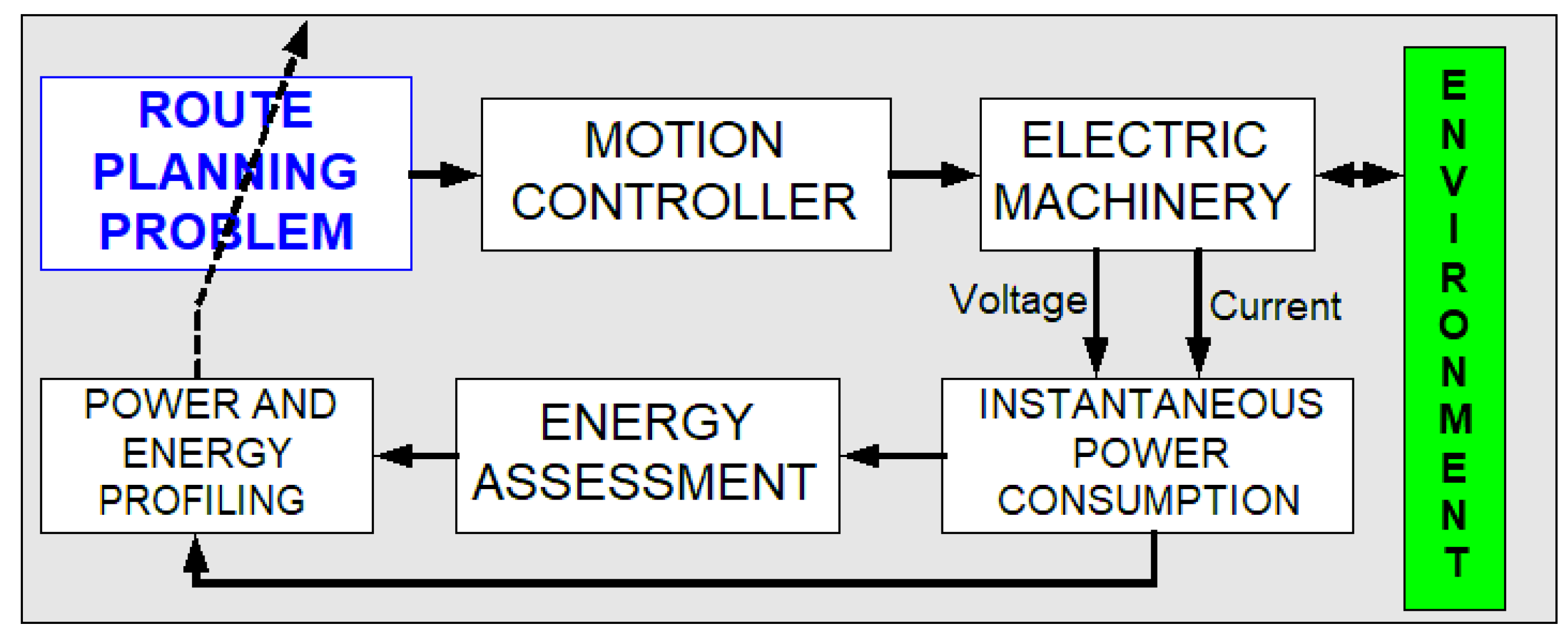
2. Materials and Methods
- The EM consists of an automated golf cart, equipped with sensors and processors as described in Section 2.1.
- The EM is aimed at performing agricultural tasks, such as monitoring. The environment chosen is an experimental olive grove shown in Section 2.2. Nevertheless, the methodology presented here does not depend on the nature of the farm, since it can be either maize, soy, or avocados, among others.
- To characterize the IPC, current and voltage sensors are used as the vehicle interacts with the terrain and the environment. The modeling of the IPC is presented in Section 2.3, and the modeling of the energy in Section 2.4.
- Both the IPC and the energy assessment are used to provide an IPC and energy profiling technique, which is later used to improve the route planning problem, as will be shown in Section 2.5.
- Finally, a motion controller receives the directives from the RPP to drive the vehicle across the grove.
2.1. Electric Machinery
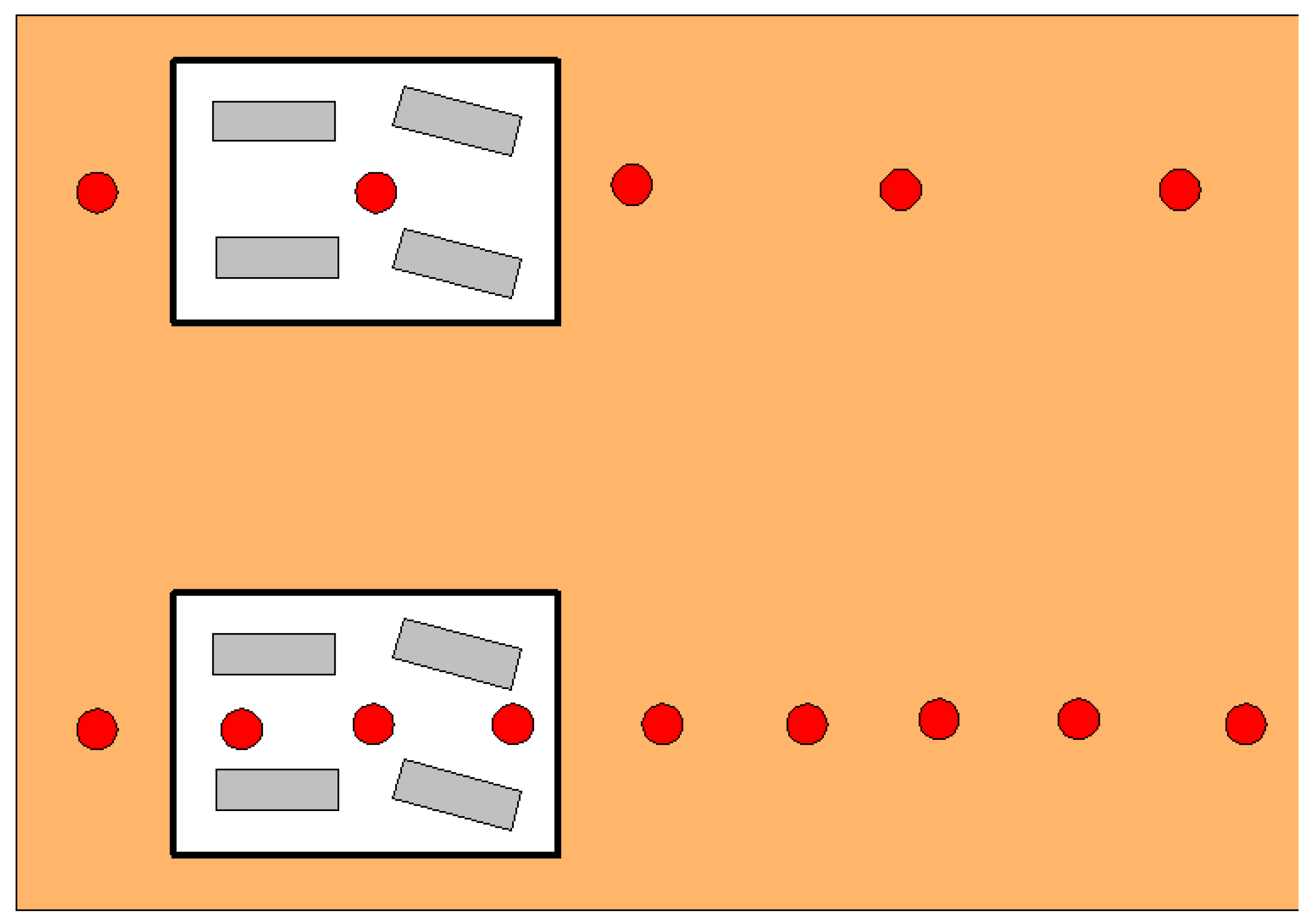
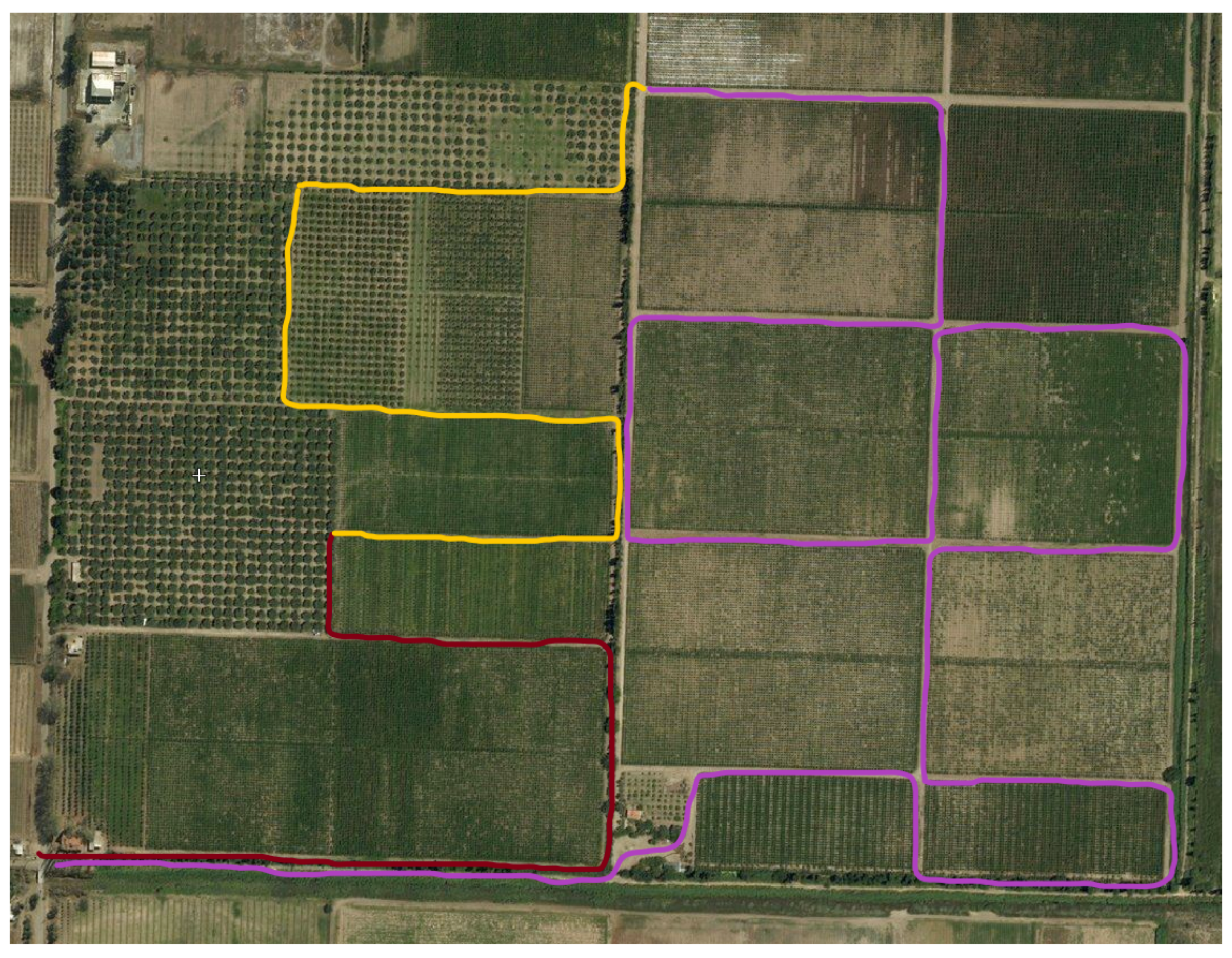
2.2. Agricultural Environment
2.3. The Instantaneous Power Consumption
2.4. Energy Assessment
2.5. Model-Based Power Profiles and the Route Planning Problem
2.6. Re-Planning the RPP
3. Experimental Results
3.1. Modeling the IPC
- The minimum traction velocity was set to 0 kmh (no backward motion was considered) and maximum velocity 20 kmh.
- The EM was set to follow a straight line at constant cruise speed, for several speed values.
- Each trial was repeated 10 times for each speed.
- Data acquired during acceleration—until reaching cruise speed—or deceleration were discarded. Thus, only the instantaneous power associated with a given constant speed was registered.
- With the data acquired, a dispersion plot was obtained, and via polynomial regression, an analytical model was associated with the data. Although we tested logarithmic and exponential, among other, approaches, only the polynomial regression showed the highest .
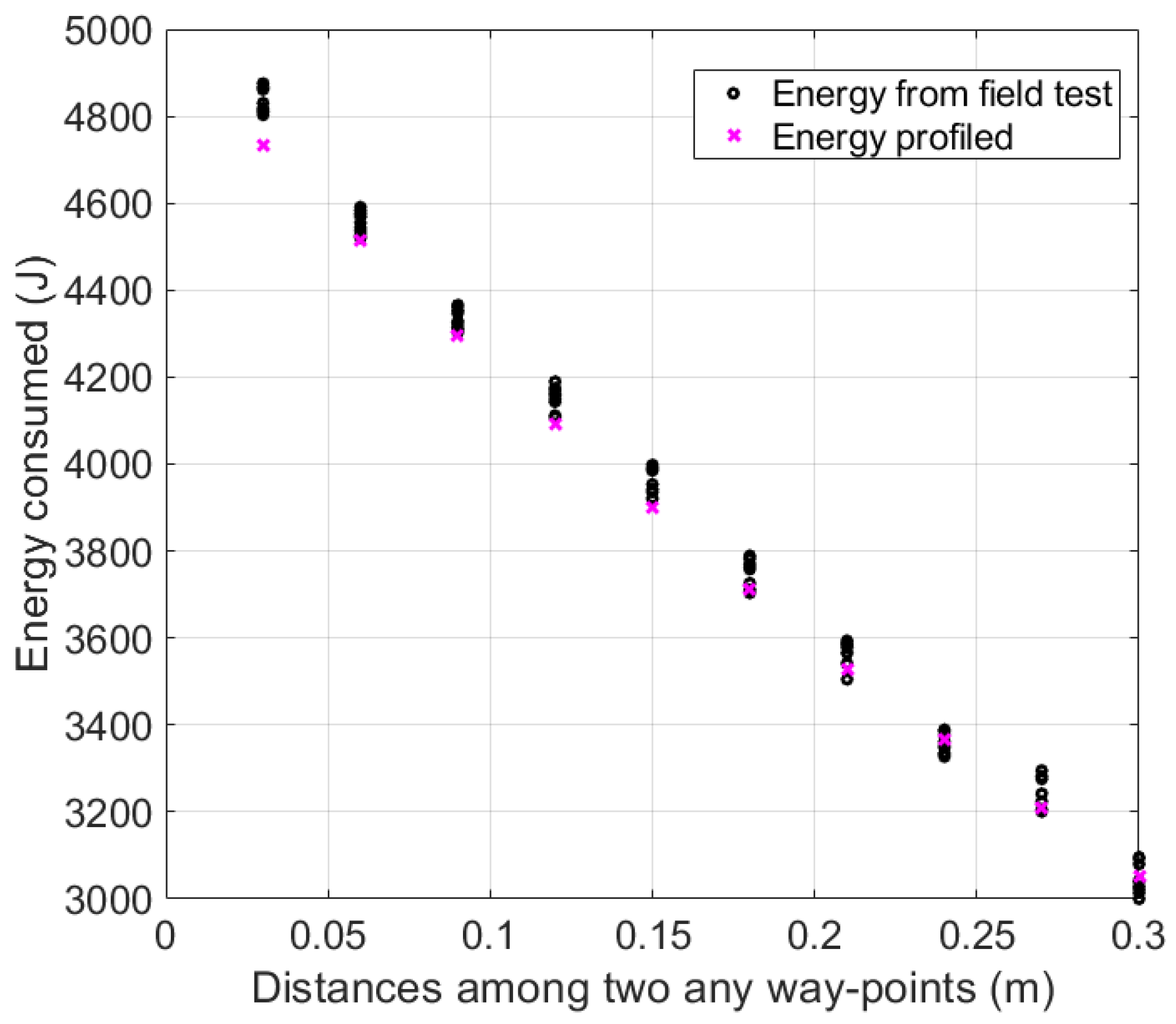
3.2. RPP Results
4. Discussion
- The modeling of the EM did not consider the effect of the temperature on the engine. Moreover, the efficiency of the system, —see Section 2.3—was assumed constant. The latter is not entirely true, since the efficiency of the engine might vary according to the internal temperature, as stated in [19,22], and thus, is actually a dynamic, and not a static, coefficient. Its modeling and how it affects the IPC will lead the future work of the authors.
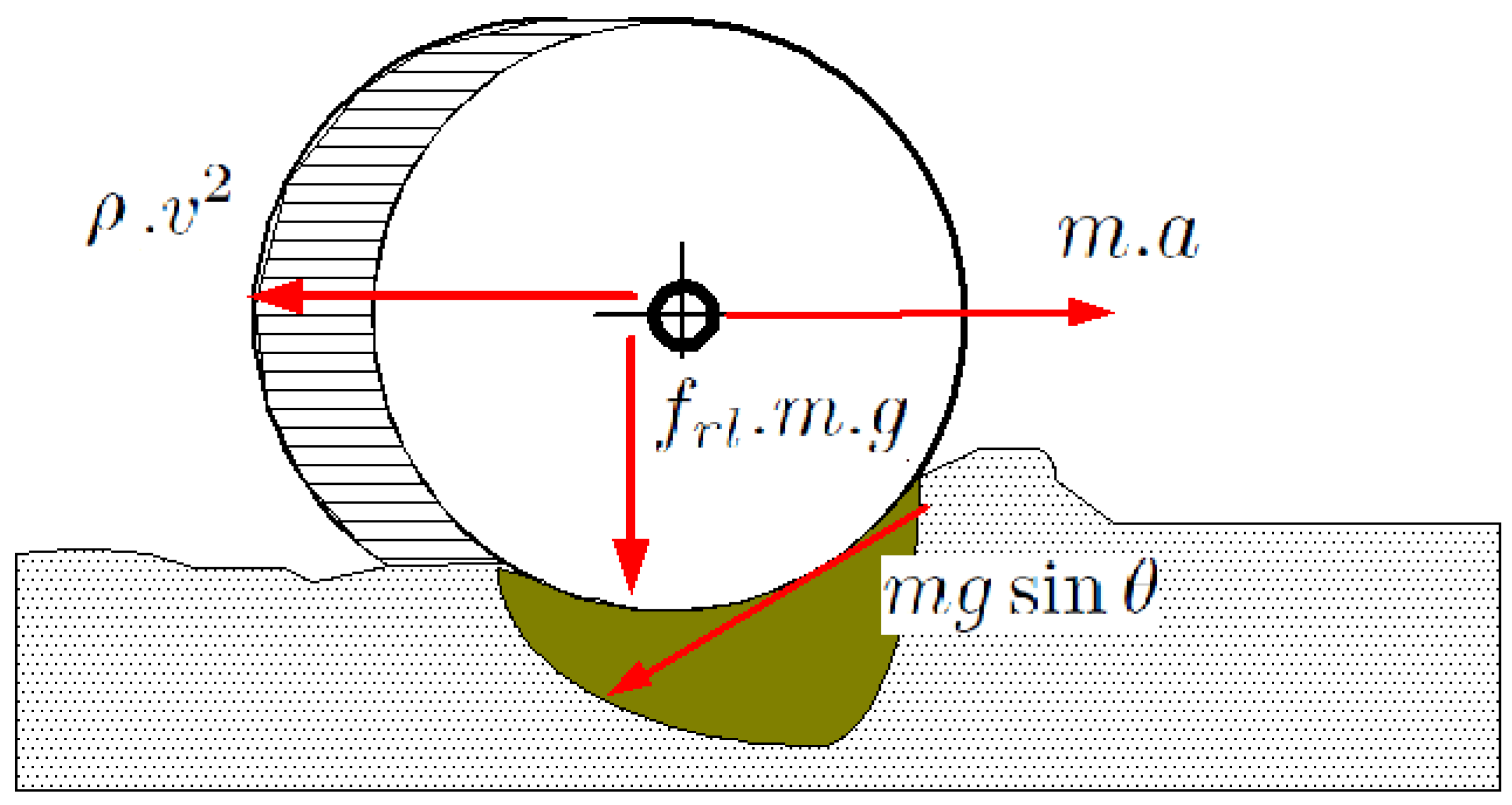
- When modeling the IPC, several assumptions were made, such as: flat terrain, negligible aerodynamic resistance, rigid wheels on the EM, and constant mass, among others. Such assumptions were necessary for the theoretical analysis, although the empirical analysis led to the fourth order model found in Section 3.1. It should be noted that the model obtained applies only for the terramechanic characteristics of the terrain where the experimentation was carried out. If the terrain changes, say to gravel, then the model from Figure 6 should be re-obtained by repeating the methodology presented in this work. However, the profiling technique shown in Section 2.5 is independent of the nature of the terrain.
- To profile the IPC, an algebraic approach was used, which was based on the kinematic model of the vehicle (positioning only). It would be expected that if the dynamic model were used instead, then the profiling could reach better accuracy indexes than the reported ones. Including the dynamic model of the EM will also lead the future work of the authors. It should be noted though that Equation (11) assumes that the vehicle effectively reaches the desired position at the next sampling time, thus the importance of the motion controller implemented. Otherwise, positioning errors could cumulate and saturate actuators.
- Optimizing the RPP by varying the distance among way-points as shown in Equation (14) was shown to be an encouraging approach. However, finding such distances was an off-line procedure, as the vehicle did not update the way-points as it traversed the agricultural field. It remains as an open field of study to explore what would happen if such a distance is real-time adjusted according to the energy availability of the system, since, as reported in [26], the stability of the controller could be compromised, as well as actuator saturation problems could arise.
- The mass of the system plays a crucial role, as shown in Equation (13). It is the future work of the authors to analyze how the profiling technique can be implemented when mass changes are present in the system (such as in the case of harvesting, seeding, or herbicide spraying).
- Although the technique shown in this work was implemented on an EM for agricultural processes, it could also be extended to other applications, such as mining, construction sites, or urban navigation.
- A prognostic analysis of the battery remains yet to be done, which was not considered in this work, and it will also lead the future work of the authors.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Caban, J.; Vrabel, J.; Sarkan, B.; Zarajczyk, J.; Marczuk, A. Analysis of the market of electric tractors in agricultural production. In MATEC Web of Conferences; EDP Sciences: Les Ulis, France, 2018; Volume 244. [Google Scholar]
- Schueller, J.; Demmel, M. Agricultural machinery engineers meet in Germany. Resour. Eng. Technol. Sustain. World 2018, 25, 18–20. [Google Scholar]
- Medzevepryte, U.K.; Makaras, R. Drawbar performance of a hybrid agricultural vehicle. In Transport Means—22nd Proceedings of the International Conference, Trakai, Lithuania, 3–5 October 2018; pp. 1246–1249. [Google Scholar]
- Cavallo, E.; Ferrari, E.; Coccia, M. Likely Technological Trajectories in Agricultural Tractors by Analysing Innovative Attitudes of Farmers. Int. J. Technol. Policy Manag. 2015, 15, 158–177. [Google Scholar] [CrossRef]
- Li, N.; Chen, Z.; Zhu, C.; Zhang, C.; Sun, Z.; Li, W. System design and experiment of electric driven weeding robot. Nongye Jixie Xuebao 2016, 47, 15–20. [Google Scholar]
- Singh, S. Agricultural machinery industry in India. AMA Agric. Mech. Asia Afr. Latin Am. 2016, 47, 26–35. [Google Scholar]
- Lohan, S.K.; Narang, M.K.; Manes, G.S.; Grover, N. Farm power availability for sustainable agriculture development in Punjab state of India. Int. Agric. Eng. J. 2015, 17, 196–207. [Google Scholar]
- Jun, H.; Hailiang, L.; Yujie, S.; Haibo, Z.; Zhongxuan, Z.; Sarker, K.K. Self-driven stubble cleaning and land preparation combined machine, China. INMATEH-Agric. Eng. 2016, 49, 21–30. [Google Scholar]
- Han, X.Z.; Kim, H.J.; Kim, J.Y.; Yi, S.Y.; Moon, H.C.; Kim, J.H.; Kim, Y.J. Path-tracking simulation and field tests for an auto-guidance tillage tractor for a paddy field. Comput. Electron. Agric. 2015, 112, 161–171. [Google Scholar] [CrossRef]
- Kim, J.; Lee, H. Motor position control algorithm for an automated manual transmission of the agricultural tractor. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2015, 229, 3341–3349. [Google Scholar] [CrossRef]
- Conesa-Munoz, J.; Bengochea-Guevara, J.M.; Andujar, D.; Ribeiro, A. Route planning for agricultural tasks: A general approach for fleets of autonomous vehicles in site-specific herbicide applications. Comput. Electron. Agric. 2016, 127, 204–220. [Google Scholar] [CrossRef]
- Amiama, C.; Cascudo, N.; Carpente, L.; Cerdeira-Pena, A. A decision tool for maize silage harvest operations. Biosyst. Eng. 2015, 134, 94–104. [Google Scholar] [CrossRef]
- Bochtis, D.D.; Sorensen, C.G.C.; Busato, P. Advances in agricultural machinery management: A review. Biosyst. Eng. 2014, 126, 69–81. [Google Scholar] [CrossRef]
- Hameed, I.A.; Bochtis, D.D.; Sørensen, C.G.; Jensen, A.L.; Larsen, R. Optimized driving direction based on a three-dimensional field representation. Comput. Electron. Agric. 2013, 91, 145–153. [Google Scholar] [CrossRef]
- Bochtis, D.D.; Sorensen, C.G.; Green, O. A DSS for planning of soil-sensitive field operations. Decis. Support Syst. 2012, 53, 66–75. [Google Scholar] [CrossRef]
- Carpente, L.; Casas-Mendez, B.; Jacome, C.; Puerto, J. A model and two heuristic approaches for a forage harvester planning problem: A case study. TOP 2010, 18, 122–139. [Google Scholar] [CrossRef]
- Bochtis, D.D.; Sørensen, C.G. The vehicle routing problem in field logistics part I. Biosyst. Eng. 2009, 104, 447–457. [Google Scholar] [CrossRef]
- LaValle, S. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Wu, X.; Freese, D.; Cabrera, A.; Kitch, W.A. Electric vehicles’ energy consumption measurement and estimation. Transp. Res. Part D Transp. Environ. 2015, 34, 52–67. [Google Scholar] [CrossRef]
- Chang, N.; Baek, D.; Hong, J. Power consumption characterization, modeling and estimation of electric vehicles. In Proceedings of the IEEE/ACM International Conference on Computer-Aided Design, San Jose, CA, USA, 2–6 November 2014; pp. 175–182. [Google Scholar]
- Cheein, F.A.; Scaglia, G. Trajectory Tracking Controller Design for Unmanned Vehicles: A New Methodology. J. Field Robot. 2014, 31, 861–887. [Google Scholar] [CrossRef]
- Cheon, S.; Kang, S.-J. An electric power consumption analysis system for the installation of electric vehicle charging stations. Energies 2010, 10, 1534. [Google Scholar] [CrossRef]
- De Cauwer, C.; Van Mierlo, J.; Coosemans, T. Energy consumption prediction for electric vehicles based on real-world data. Energies 2015, 8, 8573–8593. [Google Scholar] [CrossRef]
- Wong, J. Terramechanics and Off-Road Vehicle Engineering; Butterworth-Heinemann: Oxford, UK, 2009. [Google Scholar]
- Auat Cheein, F. Intelligent Sampling Technique for Path Tracking Controllers. IEEE Trans. Control Syst. Technol. 2016, 24, 747–755. [Google Scholar] [CrossRef]
- Prado, A.J.; Michalek, M.M.; Cheein, F.A. Machine-learning based approaches for self-tuning trajectory tracking controllers under terrain changes in repetitive tasks. Eng. Appl. Artif. Intell. 2018, 67, 63–80. [Google Scholar] [CrossRef]





© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Romero Schmidt, J.; Eguren, J.; Auat Cheein, F. Profiling the Instantaneous Power Consumption of Electric Machinery in Agricultural Environments: An Algebraic Approach. Sustainability 2019, 11, 2146. https://doi.org/10.3390/su11072146
Romero Schmidt J, Eguren J, Auat Cheein F. Profiling the Instantaneous Power Consumption of Electric Machinery in Agricultural Environments: An Algebraic Approach. Sustainability. 2019; 11(7):2146. https://doi.org/10.3390/su11072146
Chicago/Turabian StyleRomero Schmidt, Javier, Javier Eguren, and Fernando Auat Cheein. 2019. "Profiling the Instantaneous Power Consumption of Electric Machinery in Agricultural Environments: An Algebraic Approach" Sustainability 11, no. 7: 2146. https://doi.org/10.3390/su11072146
APA StyleRomero Schmidt, J., Eguren, J., & Auat Cheein, F. (2019). Profiling the Instantaneous Power Consumption of Electric Machinery in Agricultural Environments: An Algebraic Approach. Sustainability, 11(7), 2146. https://doi.org/10.3390/su11072146