1. Introduction
Personal mobility has always been a desire for humans. For over 100 years, the dominant mode of transportation has been the human-driven private car [
1,
2]. After the slow progress of recent decades, mobility is now evolving rapidly. Autonomous vehicles, along with electrification and sharing, appear to be the next big change in the field of mobility [
3,
4,
5,
6]. Up to 40 percent of the mileage driven in Europe could be covered by autonomous vehicles by 2030. Over 95 percent of new car sales are expected to be partially electrified, and 55 percent of all new car sales fully electrified by 2030. [
7] Tech giants, automakers, and startups are focusing on cities because that is where future customers live and work. After 2040, over 70 percent of the new cars sold in urban areas in the United States will be shared with driverless cars [
8]. Sharing means that mobility is a service without a private car [
9]. It is evident that environmental, social, and economic sustainability challenges demand citizens to have a more pragmatic view of car-ownership in the future [
10].
Autonomous public transportation can be a back-bone of a sustainable mobility solution. It may lead to safer roads, less congestion, and reduced parking [
11,
12,
13]. Levinson and Krizek argue that human drivers will be prohibited on public roads sooner or later [
14]. However, 78 percent of Americans report that they fear riding in an autonomous vehicle [
15]. Only 10 percent of them report that they would feel safer sharing the roads with driverless vehicles [
16]. Over 80 percent of people across the UK, France, Germany, Norway, and Spain are less willing to trust their loved ones to technology [
17]. On the other hand, in Switzerland, passengers of autonomous shuttle busses show relatively high trust in the system safety and reliability [
18]. Nevertheless, citizens will be the key for the new modes of transportation to succeed [
3]. The context of this research is Finland. On average, each Finn made approximately 2.7 trips per person in 2016. The per-capita domestic travel distance was 41 km in a day. Passenger car trips were longer in 2016 than in 2012, and public transport trips were shorter. However, the number of public transport trips had not changed [
19].
Even if dozens of trials of autonomous shuttle busses have been carried out, there are a few previous studies on it [
20]. Results from the trial in Berlin-Schöneberg, Germany indicated that the acceptance and use of autonomous vehicles in public transport is influenced by their perceived usefulness, ease of use, and social influence [
21]. According to the previous research about self-driving shuttles in Vantaa, Finland, passengers assessed traffic safety to be better than the safety of a conventional bus on the same route [
22].
Autonomous vehicles have typically been researched from the point of view of technology, operating environmentally and even other road users such as pedestrians [
20,
23,
24] or estimating travel behaviour implications via a naturalistic experiment [
25]. In this research, we focus on real-life experiences, perceptions, and feelings of passengers travelling in driverless shuttle bus in Espoo, Finland. We are interested in identifying how customers´ mobility behaviour could alter in the future. We also build background for the future researches in the area of mobility. This is important because similar types of trials will be seen in the near future, for example, in Australia, Austria, Canada, China, Denmark, New Zealand, Norway, Poland, and USA [
26].
2. Theoretical Framework: Theory of Interpersonal Behaviour
We apply the Theory of Interpersonal Behaviour (TIB) developed by Harry Triandis (1977), a general theory of social behaviours [
27]. TIB is based on social psychological thinking [
28] and the theory of social identity [
29]. TIB offers a useful model of behavioural change because it takes into account both personal factors—including roles, habits and emotions—and external or situational constraints [
30]. Accepting autonomous vehicles or not is a sensitive issue. Even if the majority of accidents are due to human error, would you allow a self-driving car to take your child to school? TIB recognises that human behaviour is not always rational. In fact, Triandis is one of the few theorists to offer an explicit role to multiple affective factors on behavioural intentions [
30,
31]. This is the reason we preferred TIB to other theories such as the UTAUT2 [
32]. TIB has been applied to a variety of research explaining human behaviour, behavioural changes, or behavioural prediction [
33,
34,
35,
36,
37,
38,
39].
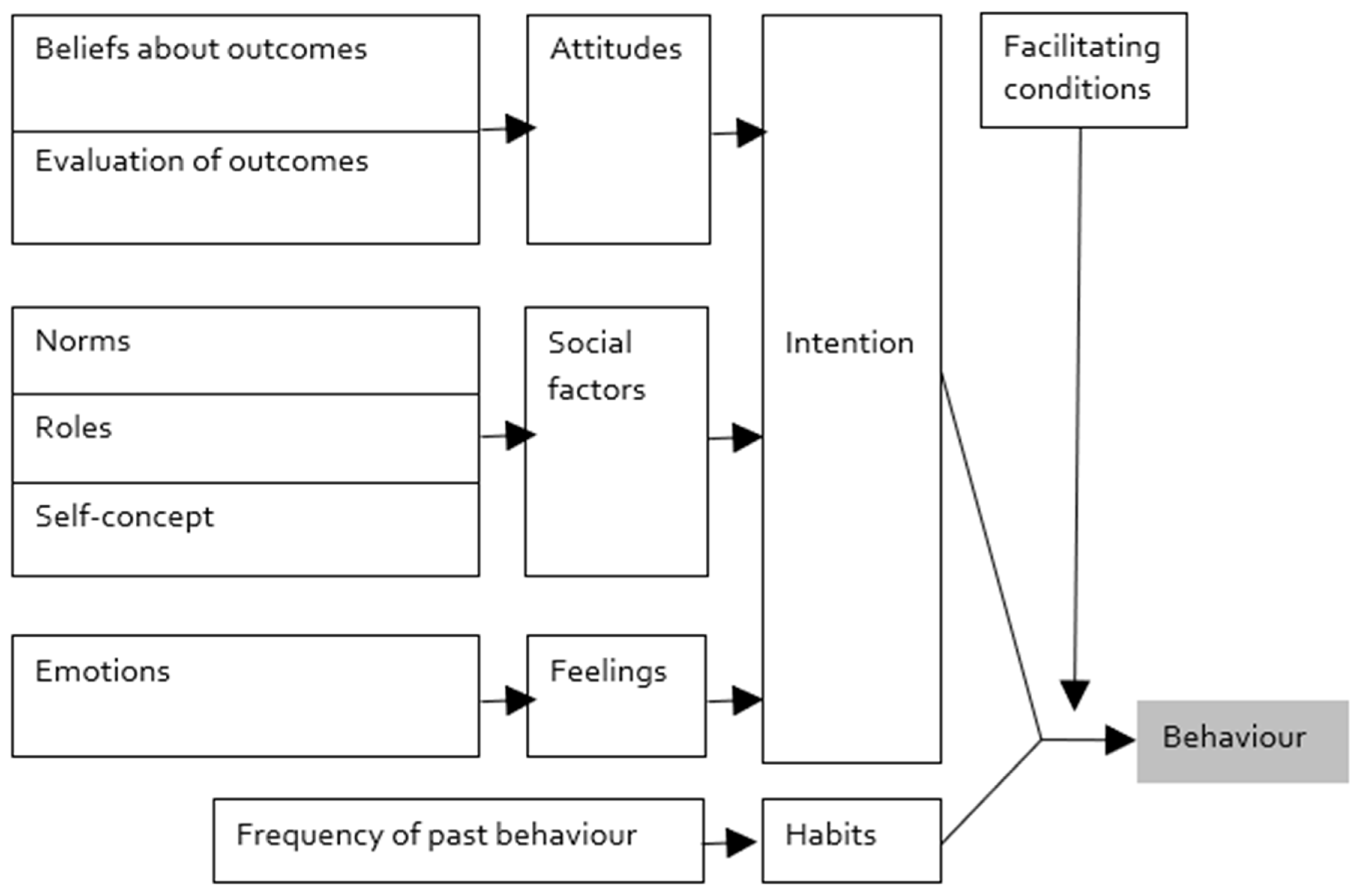
TIB focuses on the connection between human behaviour and the surrounding culture when explaining human behaviour. According to Triandis, human beings are neither fully autonomous—affected by personal factors only—nor entirely social—affected by contextual factors only. He argues that behaviour is a function of the intention, of the habitual responses and of situational conditions. The intention is influenced by rational thinking, social limits, and affective factors. In other words, human behaviour is influenced by moral beliefs, but the impact is moderated both by emotional drives and cognitive limitations. [
27,
40] (
Figure 1.)
Attitudes are evaluative ratings of objects. They consist of beliefs and the evaluation of outcomes of a new way of behaving [
25]. An intention of a new behaviour is more likely to occur if people can rely on the benefits of their new behaviour to be more significant than its harmful effects. Furthermore, people are ready to change their behaviour if they can be sure that the new behaviour will prevent problems in the future. Uncertainty about the positive consequences of the new behaviour reduces the likelihood of behavioural change [
41]. Discrepancies between attitudes and behaviour have been identified in several studies [
42,
43,
44].
Social factors include norms, roles, and self-concepts. Norms are social rules about what should and should not be done. [
27]. Therefore, a sense of good and bad plays a role in decision-making [
45,
46]. Roles are “sets of behaviours that are considered appropriate for persons holding particular positions in a group” [
27] (p. 8). These social groups, such as families, peer groups, social networks, and communities, typically have a great effect on our behaviour. For example, Wesley Schultz and colleagues [
47] showed that, when the average electricity consumption of households in a specific area was known, the residents of the area tried to reduce or increase the electricity consumption of their households to the average consumption. Self-concept refers to a personal identity. It includes goals that the person finds appropriate to pursue and establishes cognitive frames that the person is engaged in or discards [
27]. Self-concept is linked to the limits of behavioural changes. It defines how big behavioural risks can be taken [
48].
Behaviour is also influenced by feelings. They have a more or less unconscious input to decision-making. Emotional responses to a decision are supposed to be distinct from rational evaluations of consequences. [
27]. People can make a certain choice, for example, to avoid feeling guilty [
45]. A powerful factor of behavioural change is habits and routines. They guide our behaviour more than conscious choices [
49], because they are often automatic functions [
50]. Even if behavioural routines are relatively hard to modify, they can be changed [
51].
Intention refers to the individual’s motivation regarding the performance of the behaviour and can be influenced by the individual’s attitudes, emotions, or social factors [
31]. The intention is influenced by social and affective factors, as well as by rational deliberations. Thus, it is neither fully deliberative, nor fully automatic. However, TIB proposes that conscious control decreases when habits and routines are formed. Even if the intention of a new way of behaving is real, facilitating conditions still have a role to play. They include contextual factors such as legal and regulatory requirements, material costs and rewards, and encouragement [
52]. Facilitating conditions represent objective factors that can make the behaviour easier or harder to do [
31].
In this research, we are interested in identifying factors of behavioural change linked to autonomous vehicles. We answer the following research questions: (a) What kind of experiences, perceptions and feelings passengers have when they travel in self-driving shuttle bus? (b) Which factors are related to the positive and negative experiences of an autonomous vehicle? (c) What are the key factors of the intention that could make people use driverless shuttle buses?
3. Materials and Methods
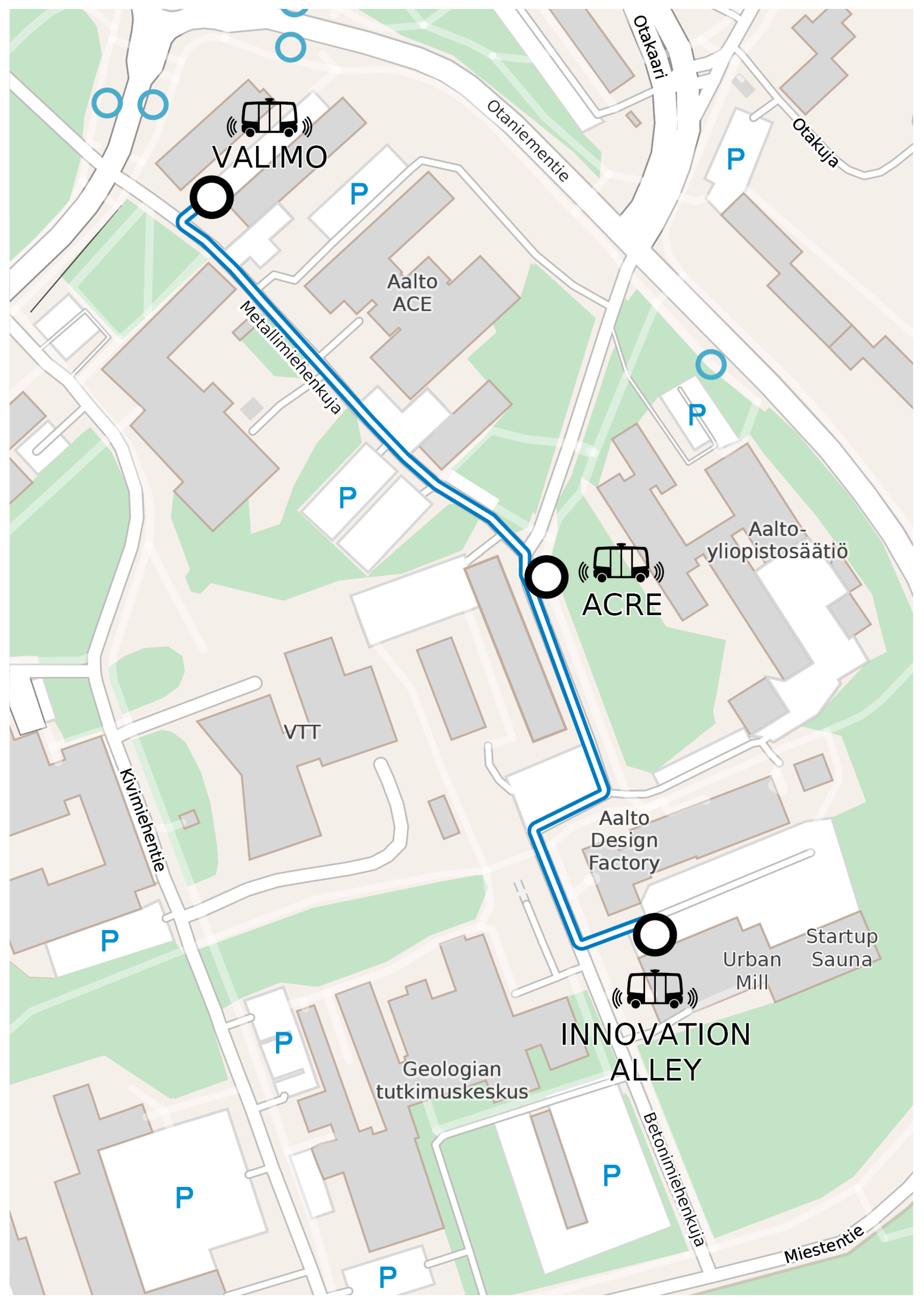
The data were collected in October–November 2017 in Otaniemi, City of Espoo, which is a part of the Helsinki capital region in Finland. Otaniemi is a business district that attracts technology businesses in particular. It is also a multidisciplinary campus area of the Aalto University.
The interviewees (n = 44) were passengers who travelled a predefined route between the Otaniemi underground station and the campus area (
Figure 2). The route provided transport on the campus area between locations. The shuttle bus also worked as a feeder to the transport system. The route was operated by the EasyMile EZ-10 driverless shuttle bus. The vehicle represented SAE Level 4 automation (SAE J3016). It follows the rules it has learned without being able to execute complex driving manoeuvres on its own. Snowflakes, heavy rain, dust, and flying leaves can cause emergency stops for the bus because it often recognizes these things as obstacles. In the trial, the driverless shuttle bus operated among other traffic for 29 days, 145 hours, and 365 km with 522 passengers. The one-way length of the route was approximately 700 metres. The carrying capacity of the bus was 10 passengers (6 seats and 4 standing passengers). The maximum operating speed was 12 km/h during the trial. There was not much traffic on the road, and it had a speed limit of 40 km/h. Since the driverless shuttle bus is not yet familiar with traffic rules, at intersections other vehicles were guided with manually controlled traffic lights. The passengers were instructed that only the traffic lights were operated by humans and the driverless shuttle bus operated autonomously. Onboard the driverless shuttle bus was an operator, who was a member of the project team, and the interviewer. The operator intervened in driving if the bus stopped because of flying leaves, dust, or snowflakes.
The interviews were carried out in either Finnish or English, depending on the language choice of the respondent. Interviews of 10–15 minutes were recorded with the permission of the respondents. (Please see the questionnaire we applied as
Appendix A). The interviews were semi-structured, and the questions had been divided into four themes: (a) Imminent reactions, (b) attitudes, (c) social factors, and (d) affections. Imminent reactions were a general theme. Other themes were derived from the TIB. According to TIB attitudes, social factors and affections form the intention for behavioural changes. First, we asked passengers to describe their immediate reactions to a driverless shuttle bus. Second, we were interested in identifying the passengers´ attitudes towards the driverless shuttle bus. According to the TIB, attitudes can be identified by beliefs and evaluations of the outcomes of a new behaviour—in this case riding a driverless shuttle bus. We asked passengers to tell us about how driverless shuttle buses can improve their daily mobility. What kind of benefits do they identify in using driverless shuttle buses regularly in the future, or what kind of things could hamper the widespread use of a driverless shuttle bus in their life? We were also interested in the social factors of a potential new mobility behaviour. Therefore, we asked passengers to imagine what kind of user group would benefit most from the driverless shuttle bus. We also asked them to tell us what they assumed their friends would think about driverless shuttle buses and why. In addition, we asked them to reflect on whether they are the type of person who would use automated buses in the future or not. The last theme of the interview was the passengers´ affects. We asked passengers to tell us which adjectives described their feelings about the driverless shuttle bus. We were interested in knowing, for example, whether they felt confident, unsafe, insecure, calm, excited, curious, or critical.
All the interviews were transcribed afterwards, resulting in 52 pages in total using Times New Roman font, size 12, and spacing 1.5. The socio-demographic characteristics of the respondents are presented in
Table 1.
We applied inductive qualitative content analysis. An inductive approach was a fruitful solution because our aim was to create a significant and broad description of the phenomena in question [
53]. An exploratory research method enables the researcher to describe the meaning of qualitative data systematically [
54]. It also increases the understanding of the phenomena [
55], because in inductive content analysis, the categories are not predefined. This approach is used to understand the perspective of the respondents and it moves from individual observations towards a general statement [
53]. Previous observations, knowledge, or theories do not affect the outcome of the analysis very much, because the analysis is directed by the content of the data. The inductive process is started by reducing data, then clustering data, and finally drawing conclusions [
56].
First, the data was read through several times in order to fully internalize and understand the data. In the first phase of analysis, we excluded all the irrelevant information, and all the relevant parts of the data were separated from the text and coded. We considered technically specific speculation, and also broad pondering about the full implementation of autonomous shuttles in the future to be irrelevant for this study. Either of these, too narrow or too broad aspects, did not describe how the experience of travelling in an autonomous shuttle bus was for the passengers, and therefore did not answer the research questions. When clustering the data, we coded the data by reading it through carefully and forming categories with similar content. We coded the data manually with highlighter pens. The purpose of forming categories is to reduce the data by grouping expressions that have the same meaning into one category, which are given a name that describes the content [
53]. In other words, the data were first broken into parts, which were then sorted into different subcategories. These subcategories were then joined to create generic categories where appropriate, from which the main categories were eventually formed (see
Table 2). This continued as far as it was feasible, and categories that describe the phenomena were formed [
57]. We wanted to assure that the categories were really equivalent to the data by returning to the data several times during the analysis. After the inductive analysis, we compared our results within the theoretical frame of TIB.
4. Results
We present our results in accordance with the main categories, generic categories and subcategories formed by inductive content analysis (
Table 2). In order to understand the results, it is good to recognise that the driverless shuttle bus is—from the point of the passengers—an example of advanced technology based on artificial intelligence [
58], which is demonstrated by this comment: “I rely on technology and I do not believe that a human being could be a better driver than artificial intelligence. In fact, I believe the opposite. That is why there is no reason why I would not use a robot bus” (Male, 25–34, Employee).
4.1. General Perceptions on Board
The respondents compared their experience in the driverless shuttle bus to a metro or a tram: “It feels like a small train and feels almost like there could be rails under” (Female, 25–34, Employee). It was pointed out that, in a metro station you do not see the driver either and there is no staff inside to help and guide people, just like there is possibly no one in a driverless shuttle bus. It was also mentioned that respondents did not actually think about the driving experience while travelling in the driverless shuttle bus because of the feeling of travelling by tram, so it did not feel abnormal in any way: “For some reason I didn’t think about the driving experience that much, maybe because it had a feeling more like travelling by tram” (Male, 35–44, Entrepreneur).
Some even felt that bus drivers are sometimes unpredictable, so the actions of driverless shuttle buses could be more easily foreseen. It was also believed that driverless buses would keep up with the schedule better, and thus enable smoother traffic. This makes them more reliable than human-driven conventional public transport. According to the data advanced technology can be trustworthy as human error is lacking, and driverless cars are capable of seeing in all directions simultaneously. Humans are considered to be very prone to distractions and some respondents felt that people cause dangerous situations when they get tired, whereas robots have endless stamina. “They could operate throughout the night because humans get tired but robot buses don’t, so it would be really cool to get to home this way in the early hours of the morning from the city centre” (Male, 25–34, Entrepreneur).
According to the analysis, whether the driver was human or not was not important for the passengers. Some respondents even stated that the absence of a driver is actually unnoticeable in a driverless shuttle bus. People do not use buses because of the driver, but because they need to get to a specific place:
“Well I believe that if there was a choice to also use a traditional bus, it would not matter to me which one I used, I would choose the one that caters to my needs better. So, the one happens to operate at the moment of my need and the one that is cheaper for me”.
(Female, 45–54, Entrepreneur)
The right route and good accessibility of the service are key factors of good mobility services. In that sense, driverless shuttle buses would serve passengers´ needs as would normal buses, and they felt that they would use it in the same way as they use conventional public transportation: “Well, for me it doesn’t really matter who sits behind the wheel, so if it is a robot then it is a robot, after all, buses have only instrumental value that you get from place A to place B, so if the bus happens to be a robot I don’t believe that people care that much after the first shock” (Male, 15–24, Student).
4.2. Safety Perceptions
Safety of autonomous vehicles was an aspect that almost all of the respondents mentioned, even though it was not asked directly. The aspect of safety raised discussions from two different perspectives: Personal security inside the vehicle, and safety of the driverless shuttle buses in general. The passengers were positively surprised at how safe they actually felt in the vehicle.
It was surprising how fast you get used to it, at first I was like oh my god this is a driverless shuttle bus, it doesn’t have a driver and then all of a sudden you feel that this is perfectly okay. You get used to it really fast and you forget that it doesn’t have a driver.
(Female, 35–44, Employee)
For most passengers, the actual experience was better than the expectations they had beforehand. Some of them were a bit nervous before the trip, but afterwards they felt safe and confident: “I had a lot of fear of what it would be like on a road without a driver, and it is really safe, I feel good about it” (Female, 35–44, Employee). One respondent stated that this trip was his second one, so he did not have any feelings of mistrust. However, when he first rode it, he felt a bit uneasy. “I have taken this trip before so I was already prepared for what it was so I didn’t have any untrusting feeling. But when I first rode that thing, it was a bit like: Wow! It is a robot bus” (Male, 25–34, Employee). Some respondents mentioned that the factors that made them feel confident and safe were the slow speed, quiet traffic, an operator inside with them, the current media attention on autonomous vehicles, which made the vehicle feel familiar, and how the route was presented visibly in the bus. “It moved kind of slowly and carefully, the slowness might not have been good for the traffic around us but it made me feel confident” (Female, 45–54, Employee).
It is really safe and it knows where to go and there is the route, so I guess all of those things made me feel safe, if they weren’t there, if you couldn’t tell where we were going or there wasn’t that confirmation, you would just be like, we are just going next door and then you would go to the highway or something.
(Female, 24–34, Employee)
The positive side of driverless shuttle buses was considered to be the elimination of human error. It was believed that driverless shuttle buses would make fewer mistakes and they can drive closer to each other, thus easing congestion. “I believe that transportation will be smoother when it is automated and then we will have less human caused surprises in traffic” (Female, 45–54, Entrepreneur). Driverless shuttle buses would not be affected by tiredness, which usually has an influence on human decision-making. “When it is more developed, the possibility of human error will be eliminated, so fatigue and other things that affect our decision-making and perceptive skills, are not there anymore” (Male, 45–54, Employee).
However, safety also raised some suspicion among the respondents. Some considered humans to be better at observing their environment, and in the case of an emergency, humans were considered to be better at overcoming sudden situations. “You have thousands of decisions to make when you drive a car, but for a robot, I don’t know if they can handle this” (Male, 15–24, Student). The respondents were worried about how robots would react if children ran into the road unexpectedly, or how would the robot make a decision whether to run over a child, an old person or to crash the vehicle. This consideration of how robots can decide who to run over or whether to crash the vehicle and save the pedestrian came up frequently. “I don’t know how it makes a decision in sudden situations. I think a big question is does it decide to run over an old person, a child, or will it crash the vehicle?” (Male, 15–24, Student).
The respondents were worried about how driverless shuttle buses would adapt to other traffic: “The bigger challenge is how to get all the pieces of traffic to work together, that is not an easy task, but at least sitting in the driverless shuttle bus is not terrifying” (Male, 55–64, Employee). It was stated that robots do not have an understanding of whether somebody is about to cross the road, and in that sense, it was believed that driverless shuttle buses would always need to be more careful. As a result, traffic gets slower and more congested, because people are better at analysing others’ movements. However, some of the respondents actually considered humans as a bigger problem than robots, because human actions are not as predictable as a robot’s action would be. In this regard, robots were believed to be safe, at least if there were no human drivers around.
Even though the respondents felt comfortable in the driverless vehicle, one thing was quite clear: Any accidents caused by driverless shuttle buses would not be tolerated: “I think that this is very prone to comments in the beginning, like any new innovation or thing. In a way there is the risk that one bad experience will spread extensively and it (driverless shuttle bus) can be harshly judged on social media.” (Female, 25–34, Student). When asked what would prevent the respondents from using driverless shuttle buses regularly in the future, it was stated that if accidents occur, they would not use them anymore. “If I see a lot of accidents I wouldn’t go there.” (Male, 25–34, Student).
4.3. Operation Environment
According to the analysis of the data, the affordance of the mobility services should be good enough to meet the real mobility needs of people. When analysing what would make the respondents use driverless shuttle buses regularly in the future, the route arose as being the most important factor. Even if pure novelty would make one use in the beginning, for regular use, the route is a crucial factor: “I will use it if it operates on a good route” (Female, 15–24, Student). “It would have to go on the routes I need because otherwise I would use other public transport” (Female, 45–54, Employee). The respondents stated that they would use driverless shuttle buses if they operated on routes that the respondents used daily, like the route between their home and work: “If it ran regularly between my home and workplace I would use it” (Male, 55–64, Employee). It was pointed out, however, that even with the right route, the current slow speed of the bus could prevent respondents from using it.
The respondents wished that driverless shuttle buses could enhance the contemporary transport services by providing more flexible customised routes, which would be less expensive due to the elimination of drivers’ wages: “If we think about normal buses (…) there is always a driver on board, it produces a lot of expenses, so I see this in terms of decreased expenses and the possibility to achieve more flexible services for customers” (Male, 55–64, Employee). These resources could then be used to provide more vehicles so that the driverless shuttle buses could run more frequently than regular buses do at the moment. “I think you can probably drive more lines and maybe smaller units because then you don’t need people to work and drive the bus. Then you don’t need as many drivers so you can actually have more buses and a smaller gap between them and that would actually improve public transport a lot” (Male, 25–34, Student). The other possibility that wage elimination was hoped to provide operation around the clock, which would improve the accessibility of public transport. “Robot buses can work during night time and we don’t need to worry about the cost and whether the bus will be there” (Female, 15–24, Student).
The most desired enhancement of services was an on-demand service, so that routes could be determined by the people travelling within the vehicle. Some stated that, with human interaction, this could be harder as the driver could get confused with the changing routes. “With algorithms we could have something similar to what the Kutsuplus-service was, so that the routes could be optimized to function smarter. If you changed the routes for a normal driver all the time, you would probably have more troubles than with a robot bus” (Male, 25–34, Employee). Respondents hoped that driverless shuttle buses could replace the Kutsuplus service [
59]. Many of the respondents were displeased that the Kutsuplus service ended and hoped that driverless shuttle buses would have an on-demand service. The aim of the Kutsuplus service was to give an easy option for car users to transfer to public transport. The service was based on on-demand minibuses with non-fixed routes. Due to funding issues, the service came to an end in 2015 after three years of operation. However, the experiment was a success according to the customers [
60].
In previous studies, on-demand autonomous vehicles have been recognised as an effective solution for the everyday mobility needs of citizens [
61]. According to our data, on-demand robot-buses were seen as a solution to the fact that with public transport you rarely get to the actual place where you are going: “Well, usually the biggest problem of public transport is that in general people go from place A to place B, only public transport doesn’t, but leaves you in a different place. (…) Mostly I am waiting for the robot traffic to be better than Kutsuplus” (Male, 55–64, Employee). On-demand driverless shuttle buses were also considered to be convenient for disabled people and children as you could let the bus know the requirements of the passengers in advance.
4.4. Overall Feelings and Perceptions
The respondents described their overall feelings towards driverless shuttle buses with the adjective “interesting”. “Well of course at the beginning it is the novelty that is super interesting” (Female, 25–34, Employee). The respondents were interested in knowing if the driverless shuttle bus already really works well and how far in the future the wider use of driverless shuttle buses actually is. The driverless shuttle bus also raised curiosity in the respondents; many wanted to see what stage the technology is at and where it could go: “Well, I’m interested in what it is really like and how soon we can use these more often, or does this still need a lot of development?” (Male, 15–24, Student). One respondent even compared the driverless shuttle bus to a spaceship “if you could get a ride in a spaceship, wouldn’t you go?” (Female, 25–34, Employee).
Trust towards driverless shuttle buses divided the respondents into two groups. Some felt they really trusted driverless shuttle buses, but others were a bit sceptical. “Some (friends) see this as a possibility and in a positive light but some still wonder are robotics necessary and couldn’t we just manage with humans?” (Female, 25–34, Student). One respondent stated he did not have trust issues because his generation has been raised to trust robots, maybe more than humans. Some suspected that people in general would have feelings of mistrust and fear towards driverless shuttle buses. Others believed that even though the technology was not, in their opinion, so developed at the moment, they believed it would be in the future. Again, the issue of safety arose: “This goes quite slowly so the technology still needs to develop to be more trustworthy and safer but when it is more developed and can go faster it will be really good, I support this” (Male, 25–34, Something else).
Some were suspicious themselves and some suspected that others, mainly older people, would have suspicions about driverless shuttle buses. However, all passengers that were between 55–64 years old had a positive image of the driverless shuttle bus. Some of the respondents suspected that some of their friends might have just decided that driverless shuttle buses were bad, because they oppose technology in general:
I think, considering family and relatives, the older they are, the more suspicions they have. But I do believe that younger people think that, okay, the world has crazier things than self-driving cars. Those will come when the technology is at that point.
(Male, 15–24, Student)
The capability of people to adjust to driverless buses was seen as a challenge: “People may have some prejudices and it will require a change in attitudes” (Female, 15–24, Student). Even though it was believed that technology will develop to the point where driverless shuttle buses are absolutely safe and trustworthy, the respondents were not so sure how it will be possible to get people to use them. “I don’t think there is anything restricting those people from using this thing, it is more about adaptation, once you get used to this” (Male, 25–34, Student). Only a few passengers thought that they would definitely choose a robot driver over the human one. There are other reasons for a human driver than traffic safety and effectiveness. People are not used to travel in a driverless vehicle and when there is not a human driver, there is nobody you can talk and complain to: “Well, it is just the habit or the lack of habit of some technology or artificial intelligence to steer this kind of vehicle, and there is no driver to whom you can talk and complain to” (Male, 15–24, Student).
However, some respondents believed that, in the end, this is just something that people have to accept because there is no way around it: “This requires getting used to (…) There must be some reasons why it will be tested and developed and eventually used, so it must in some way be better than a normal bus that is driven by a human” (Female, 15–24, Student). It was also believed that, in general, people actually adapt to new technology very fast. “New technology is coming all the time and arriving to the market, so nowadays it is really easy to adapt to” (Male, 25–34, Student). However, it was stated in the beginning that this could be very prone to comments if people have bad experiences.
4.5. Effects on Mobility Behaviour in the Future
According to the analysis, driverless shuttle buses could reduce the usage of cars. “It decreases the need for private cars for short trips” (Male, 55–64, Employee). It was seen that, if the driverless shuttle buses could run more frequently, they could reduce the need for cars, especially for shorter trips. Most interesting was the fact that those respondents who especially described cars to be part of their lifestyle, and that they use cars daily, also mentioned that they would use driverless shuttle buses in the future, even though they do not usually use any other modes of public transport: “I’m quite a regular car user but instead of traditional public transportation I could easily use this.” (Male, 25–34, Student). When asked about which user groups driverless shuttle buses would suit the best, a couple answered, for everybody, “even for us car users: I am myself a devoted private car user and I have driven a car my whole life (…) I could absolutely use a driverless shuttle bus” (Male, 25–34, Entrepreneur). There are various reasons for this. A respondent mentioned that he hates driving but still does it daily, and with driverless shuttle buses he would not have to. “Of course (could use an autonomous shuttle bus). I don’t like to drive a car even though I do it every day” (Male, 55–64, Employee). Respondents also saw this as a good opportunity for the occasions when people had consumed alcohol and couldn’t drive. It was also suspected that in the future, the use of private cars in the city centre would be restricted, in which case driverless shuttle buses could serve citizens´ needs. One of the respondents stated that, if the driverless shuttle bus operated on the route of a couple of kilometres between his home and work, he would absolutely use it, which brings us back to the importance of the route.
Some respondents considered that autonomous vehicles could be seen as a threat to the practice of driving: “If we think about my father, (…) he thinks that this (a driverless shuttle bus) reduces his autonomy, which is something he has with his own combustion engine car.” (Male, 25–34, Student). Many of the respondents, who did not mention anything about their own car use, considered that driverless shuttle buses could decrease the use of private cars in general, mainly if they ran frequently. Others, on the other hand, thought that driverless shuttle buses are suitable for those who do not have their own car, like children, students, and the elderly.
5. Discussion
Next, we will discuss our results with the theoretical ideas from Harry Triandis´ Theory of Interpersonal Behaviour [
27]. According to the TIB, the intention to change mobility behaviour consists of a citizen´s attitude, social factors, and affect. Habits and routines, as well as contextual factors, also affect the new mobility behaviour. Behavioural change is more probable if the change provides benefits that overcome the disadvantages [
39].
In the eyes of the passengers, driverless shuttle buses have both positive and negative impacts in their life and society in general. These impacts are based on beliefs and evaluations of outcomes (see
Figure 1). If the positive benefits overcome the negative ones, a positive attitude can be expected [
27]. The negative outcomes of this kind of high-tech solution, which can prevent the change in behaviour, are that some people have started to fear that driverless shuttle buses will take jobs in a society [
18], or in the bigger picture, that artificial general intelligence (AGI) could turn against humans, as seen in movies. Moreover, some people oppose technology in general, because work done by humans is seen as more valuable. This attitude comes from their worldview, and attitudes influence the use of new technology directly [
62]. However, younger people have been born into a world where technology is already trusted. It is also probably the reason why they feel that their parents have prejudices against driverless shuttle buses. Nordhoff et al. found that younger people also care less about the opinions of people important to them than older people do when it comes to the decision of whether to use driverless shuttle buses or not. Age also correlates with the feeling of how easy driverless shuttle buses are to use; the older one is the harder it feels [
21]. However, a study carried out in Switzerland indicates that 92% of the respondents (n = 181) felt that the driverless shuttle bus was easy to use [
63].
The elimination of driver wages was seen as a positive outcome of driverless shuttle buses. However, the respondents were not hoping for reduced costs for the consumers. Rather, it was hoped that the funds saved would be used to improve the quality of the mobility services through more frequent lines, on-demand services, and operation around the clock. This indicates that reduced costs are not necessarily considered to improve customers’ quality of life, but that better services might do that. This trend is typical in a society where citizens´ basic needs are relatively easy to fulfil in everyday life [
64]. As public transport does not typically carry you directly where you are going, driverless shuttle buses were hoped to provide a more personalised service that can fulfil individual needs better than the conventional services available now. Driverless shuttle buses were believed to provide flexibility and therefore enhance quality of life. From this point of view, the best possible outcome would be a new on-demand mobility service on flexible routes. People seek comfort in their life and solutions that help them in their fast paced lives.
Our study revealed that cars might be seen as unpleasant but necessary in society [
10]; cars are used since public transport cannot fill the needs of mobility sufficiently or it is not seen as a suitable option otherwise. According to Dittmar, cars have symbolic value, which refers to the self-concept of a person. As driverless shuttle buses were seen to enable more individual services, they can decrease the need for and use of private cars and thus change the role of car drivers. [
65] “Car driver” is a role to have as a human being [
27]. Immaterial motives to drive and own a car are increasing, and cars are used to express one’s social position [
66]. However, driverless shuttle buses might change the social role of car drivers. Our results suggest that autonomous buses could decrease the need for and use of private cars. This was the case with both car owners and people who did not determine their use of cars.
People are accustomed to human driven mobility. It is a norm in a society. However, our results show that passengers seem to think that the driver’s purpose is to steer the wheel and if the job can be done otherwise, it does not concern the passengers as long as they reach their destination. In the other words, buses have only an instrumental value for passengers and they are only used for transportation. In a way, the driver does not exactly serve any purpose for the passengers anymore and that might be why it is not seen as a relevant factor. Therefore, the route of the driverless shuttle bus arose as a crucial factor for the existence of driverless shuttle buses. The importance of the route suggests that personalised services are required, as transportation designed for the masses rarely meet the exact needs of an individual citizen. The right route would therefore serve an individual’s real needs of mobility and that is why it was considered the most important factor. It is important that driverless shuttle buses serve the real needs of people; because mere good performance does not guarantee the acceptance of new technology [
62], and other incentives are also required. However, according to Nordhoff et al, driverless shuttle buses are already seen as a useful and important part of the transport system [
21].
The respondents argued that even though driverless shuttle buses were considered to be a relatively positive thing, it might be hard to get people to use them. This relates to the habits and routines people have [
27]. Human behaviour is guided more by habits and routines than conscious choices [
49]. Even if behavioural routines are relatively hard to modify, they can be changed [
51]. According to our results, emotions that could help with behavioural change were the interest and curiosity towards driverless shuttle buses. People are naturally curious of new things, especially if they can affect their life. It is only natural that the driverless shuttle bus also caused a lot of interest among the passengers. Passengers want to test in advance what is coming next to their society. Safety was also an emotion that could very well affect the decision-making of whether to use a driverless shuttle bus or not [
27]. Different things affected the passengers’ feelings of safety.
The results indicate that the passengers did feel safe when travelling with the driverless shuttle bus. This was also the result of the studies carried out by Nordhoff et al, Merat et al, and Salonen [
21,
22,
63]. Factors that were mentioned as making the passengers feel safe were facilitation conditions, such as the speed, quiet traffic in the area, and the operator on board. The feeling of safety is somewhat bound to the environment. Even if humans, as drivers, were considered unreliable and unpredictable, paradoxically, it was still hoped that a human would be inside the driverless shuttle bus, to make the passengers feel safer. Additionally, in the study of Nordhoff et al, the respondents felt that supervision by an operator during the trip was preferred [
21]. This reveals that people still hesitate whether to trust driverless shuttle buses or not. The facilitating conditions that could prevent the change in behaviour and cause the passengers to feel unsafe would have been bigger roads with more vehicles and higher speed limits [
31]. Moreover, when the driver is not there anymore, there is no natural channel for the passengers to express their feelings, especially the unpleasant ones so that they feel they are being heard. Humans need the feeling that they can communicate with another human if the situation requires it. The operator on board did not have to manage the bus in any way, but the image of a human in charge makes the passengers trust driverless shuttle buses more. Trust was also increased because passengers had a strong association with rail traffic. They felt that when travelling by a driverless shuttle bus, they had the familiar feeling of travelling by metro or tram, where you rarely interact with the driver, or even witness the driver’s existence; you just trust that you get where you are supposed to. Feelings of familiarity were revealed to enhance the feeling of safety. People feel safe around things they are accustomed to. According to Hengstler et al., the more visible the role of technology is, the harder it is to trust. In rail traffic, the absence of driver is not as visible as it is in a bus [
67].
Even if passengers did feel safe in the driverless shuttle bus the results indicate that they are less tolerant of accidents caused by autonomous vehicles than humans. It was stated that if they heard about accidents caused by driverless shuttle buses, they would stop using them. However, the same was not said about human drivers. Social factors, such as norms, roles, and self-concept, define our behaviour to a great degree. They have impact on what should and should not be done [
27], and what is good and what is bad [
45,
46]. Understanding the social factors that guide the social conception of automation is critical [
62]. Driverless shuttle buses do not have a socially formed set of rules according to which they operate. The norms and roles guide the human bus drivers to act in a way that is considered socially appropriate [
27]. People are not considered to cause accidents deliberately in any case, because it is not acceptable. As Azim Shariff and colleagues put it: “Every day the adoption of autonomous cars is delayed is another day that people will continue to lose their lives to the non-autonomous human drivers of yesterday” [
68]. We can not say the same about driverless shuttle buses, as there are no values that guide their actions. Thus, they do not have the socially controlled tendency to try to keep everyone safe. Overall, however, the respondents were mainly concerned about the safety of others, not of themselves as passengers of the driverless shuttle bus.
Driverless shuttle buses have not yet proved their capability in society. The ultimate impacts of autonomous vehicles on travel and the built environment are still speculative [
23]. By giving the possibility for people to try them in a safe environment, and thus, providing positive experiences, and intentions towards new mobility behaviours can be created if it is so wished. Lack of experience can also cause feelings of insecurity. The more experience one has, the more confident one feels. Therefore, to successfully introduce the adaptation of driverless shuttle buses to the public, it would require experiments where the passengers feel that someone is in control of the situation, in a safe environment. By getting people to try these with small steps, gaining good experiences, overall opposition towards technology might be reduced. Additionally, according to Nordhoff et al., small steps and operation in a safe environment are the keys to successfully introducing self-driving shuttle buses to the public [
21]. By presenting the concrete benefits of driverless shuttle buses, passive resistance can be reduced [
69]. By explaining the clear purpose of driverless shuttle buses, the development of distorted perceptions can be prevented and interest and desire created [
67]. There are also other remarkable benefits that respondents did not mention. For instance, fleets of self-driving mini buses could help curb traffic pollution and congestion [
70]. It is also good to remember that the passengers we interviewed were from the technology business area. This enhances the quality of their attitudes, social factors, and feelings.
6. Concluding Remarks
Currently autonomous vehicles are tested on the road in many countries. The uniqueness of this study is in the immersion and first-hand experience of being in an autonomous vehicle as a passenger. We examined both personal factors (attitudes, feelings, social factors, and habits), and contextual factors that affect the intention of change of mobility behaviour. The intention of new mobility behaviour is influenced by rational thinking, social limits, and affective factors. There are limitations in this research. We applied qualitative content analysis, which is a descriptive method. What we also know is that qualitative information is difficult to verify. Thus, our results cannot be generalised beyond the data we analysed [
53] (pp. 112–113) [
71] (p. 407). Therefore, we have reported our analysis in detail and as transparently as possible. In order to minimise the risk of subjectivity, we researchers acted as opponents to each other. However, quantitative methods with hundreds of passengers travelling in autonomous shuttles are needed in order to generalize our descriptive results.
Our results revealed that, even if the respondents had some negative thoughts about driverless shuttle buses beforehand, the passengers’ image of driverless shuttle buses was definitely improved during the trip. Their prejudice reduced and the feeling of safety in particular was better than they expected beforehand. A feeling of familiarity was definitely an aspect that increased the feeling of safety and the overall positive image. It makes the passengers forget that, in fact, the vehicle does not have a driver. The positive side of driverless shuttle buses was also considered to be foreseeability and reliability. However, the positive sides were not so significant that a driverless shuttle bus would definitely be chosen over a human driver.
Even though the respondents felt relatively safe in the driverless shuttle bus, the safety of driverless shuttle buses in city environment in general made the passengers a bit hesitant. It was seen that there are situations in which driverless shuttle buses might handle better, but there are definitely situations in which humans perform better. The respondents also had strong opinions about accidents caused by driverless shuttle buses. This is an aspect that could really damage the image of autonomous vehicles in general. People might also oppose driverless shuttle buses because of an ideology. Work done by humans is seen as valuable and the technology replacing humans was considered to potentially affect negatively in society. On the other hand, even car owners could be possible users of driverless shuttle buses if they operate on-demand basis instead of on-schedule, and move on flexible routes instead of fixed routes. We summarise our findings as follows:
- -
Feelings of familiarity towards a tram or a metro, for example, ease adapting to an autonomous vehicle.
- -
The services provided by driverless shuttle buses will have to meet the actual mobility needs of people for them to be accepted and used. On-demand services on flexible routes are especially important.
- -
Driverless shuttle buses can possibly decrease the use of private cars if the services provided are better than conventional buses. This was the case for both car owners and persons who did not specify their relationship to cars.
- -
One good experience already enhances the personal feeling of safety considerably, but people still have hesitations about the general safety of driverless shuttle buses. Opposite to human driver, any mistakes will not be accepted by the autonomous vehicle.
Our conclusion is that attitudes, social factors, and emotions of the passengers of the self-driving shuttle bus trial in Espoo, Finland form an intention to change mobility behaviour. The decision whether to use a driverless shuttle bus or not correlates highly with the contextual factors. Route and flexibility surface as the most important reasons for behavioral changes. If the automated transportation serves these needs better than conventional services available at the moment, people are more accepting. Thus, the needs of people should be carefully determined and the operation of driverless shuttle buses planned accordingly. To prevent the development of negative images, it might also be effective to create an image of a driverless shuttle bus as a conveyor rather than a replacement for a conventional bus.
In the future, it would be fruitful to research whether a low threshold to automated mobility could be created without the image of negative impact, if driverless shuttle buses were introduced as a new concept of transportation and not as a replacement for anything existing transportation solutions. The most probable way to organise the operation of shared, self-driving fleet of shuttle buses is to create a management system where the operator can be removed from the bus to a remote control room. A remote operator could intervene if the driverless shuttle bus faces any obstacles or problems it cannot handle.






{kind=link}
{kind=link}