1. Introduction
Renewable energy is drawing much attention as an energy source that can replace fossil fuels. Solar energy is the most representative renewable energy and an infinite, eco-friendly energy but is highly dependent on temperature and solar radiation. Temperature affects voltage, and solar radiation affects current [
1,
2,
3]. Temperature and solar radiation have a direct impact on solar power output and, in particular, cause a change in MPP (maximum power point). In order to track the MPP of the PV system efficiently, an appropriate DC-DC converter and a tracking algorithm (method) must be integrated and configured, and the following conditions must be satisfied [
4]:
Fast tracking response (transient response).
No vibration around the MPP (steady-state response).
Response performance against insolation and temperature change.
Simple structure and low cost.
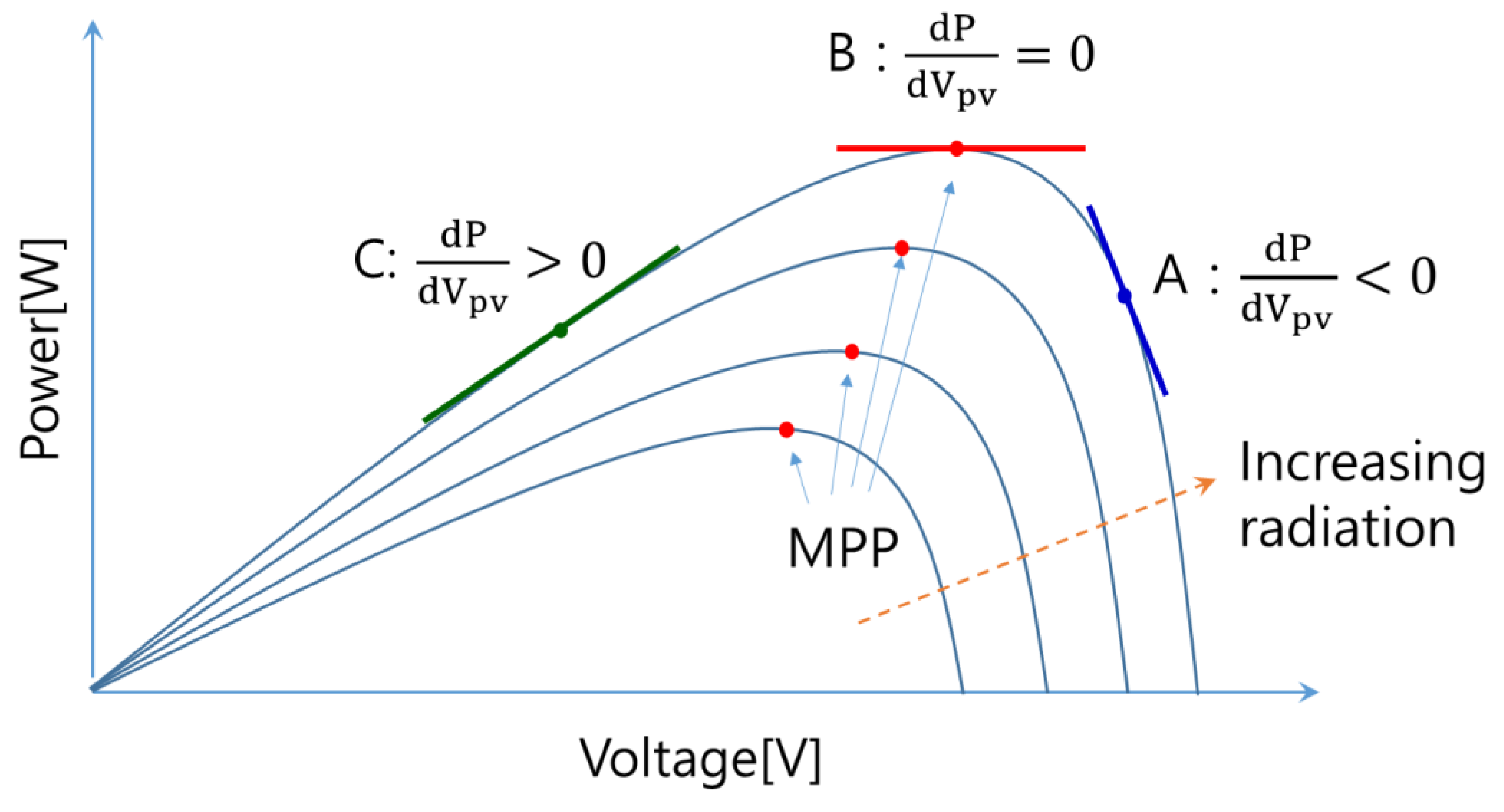
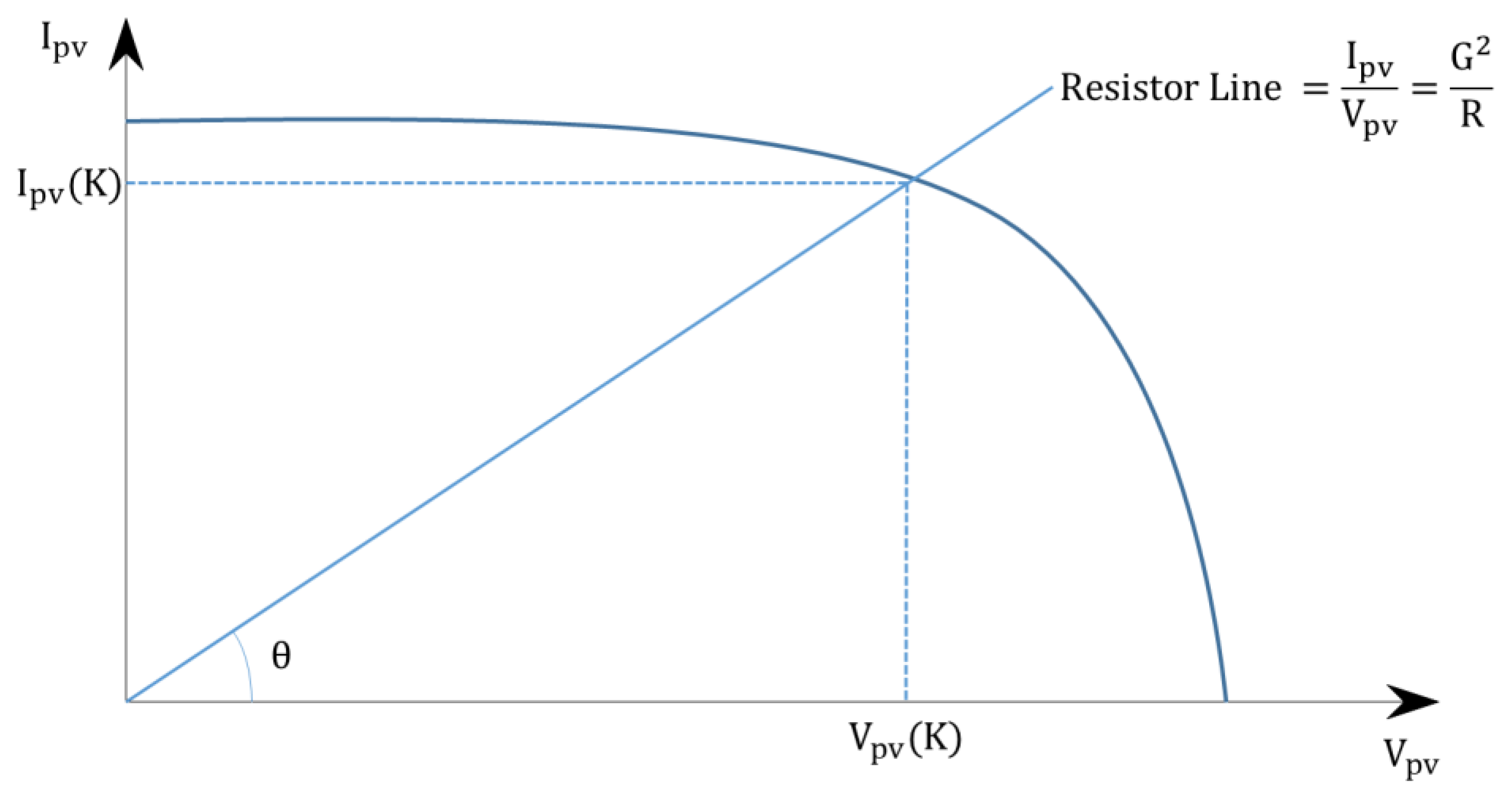
Typical methods for MPPT (maximum power point tracking) are the Constant Voltage method using a fixed ratio of the open voltage, P&O (Perturb & Observe) method using power and voltage perturbation, and IncCond (Incremental Conductance) method using slope and conductance that can be obtained in the current (
)-voltage (
) and power (P)-voltage (
) curves [
5,
6,
7,
8,
9,
10,
11,
12,
13]. In addition, These methods use reference voltage [
14,
15,
16,
17,
18,
19,
20,
21], reference current [
22,
23], or duty ratio [
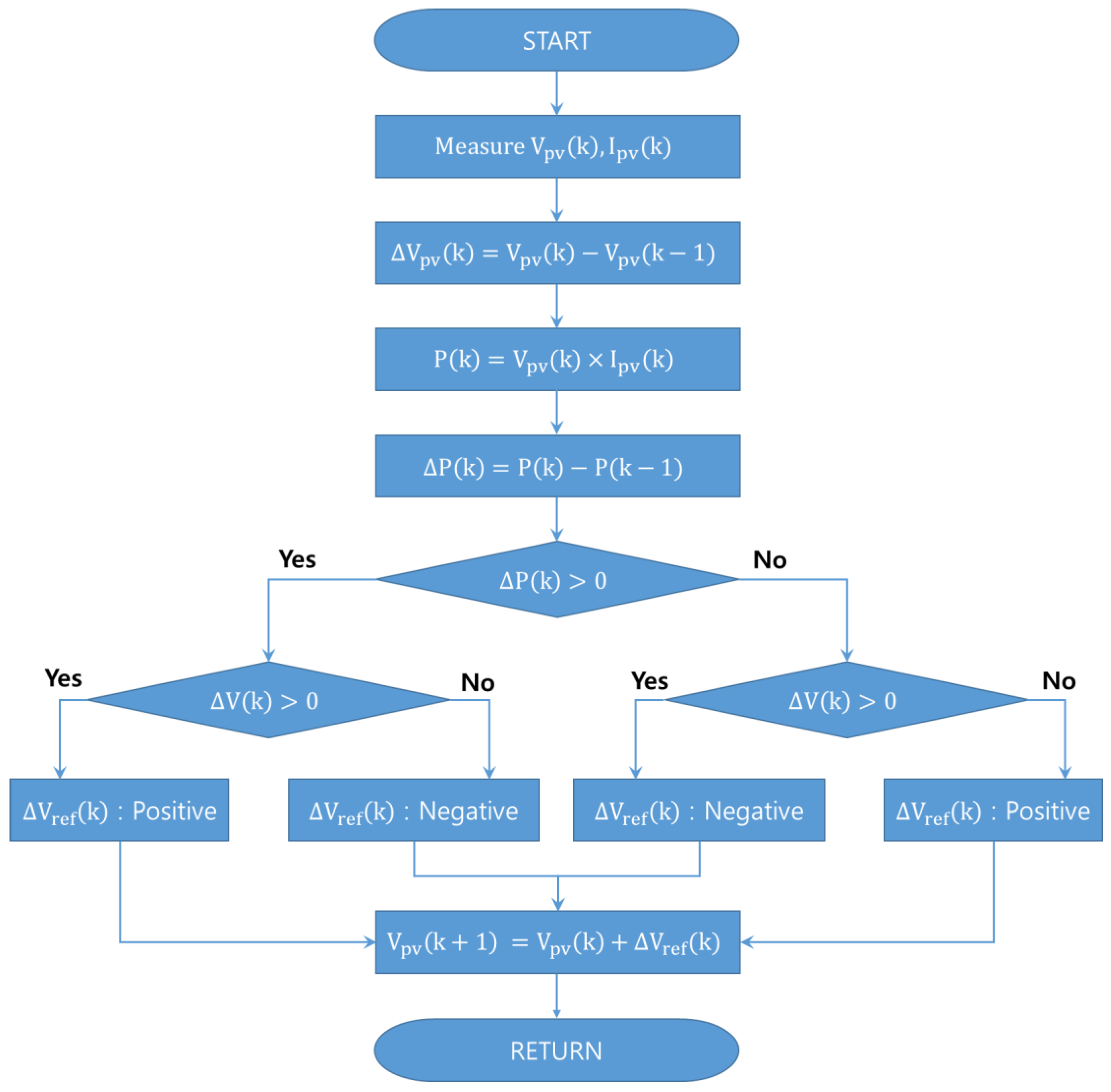
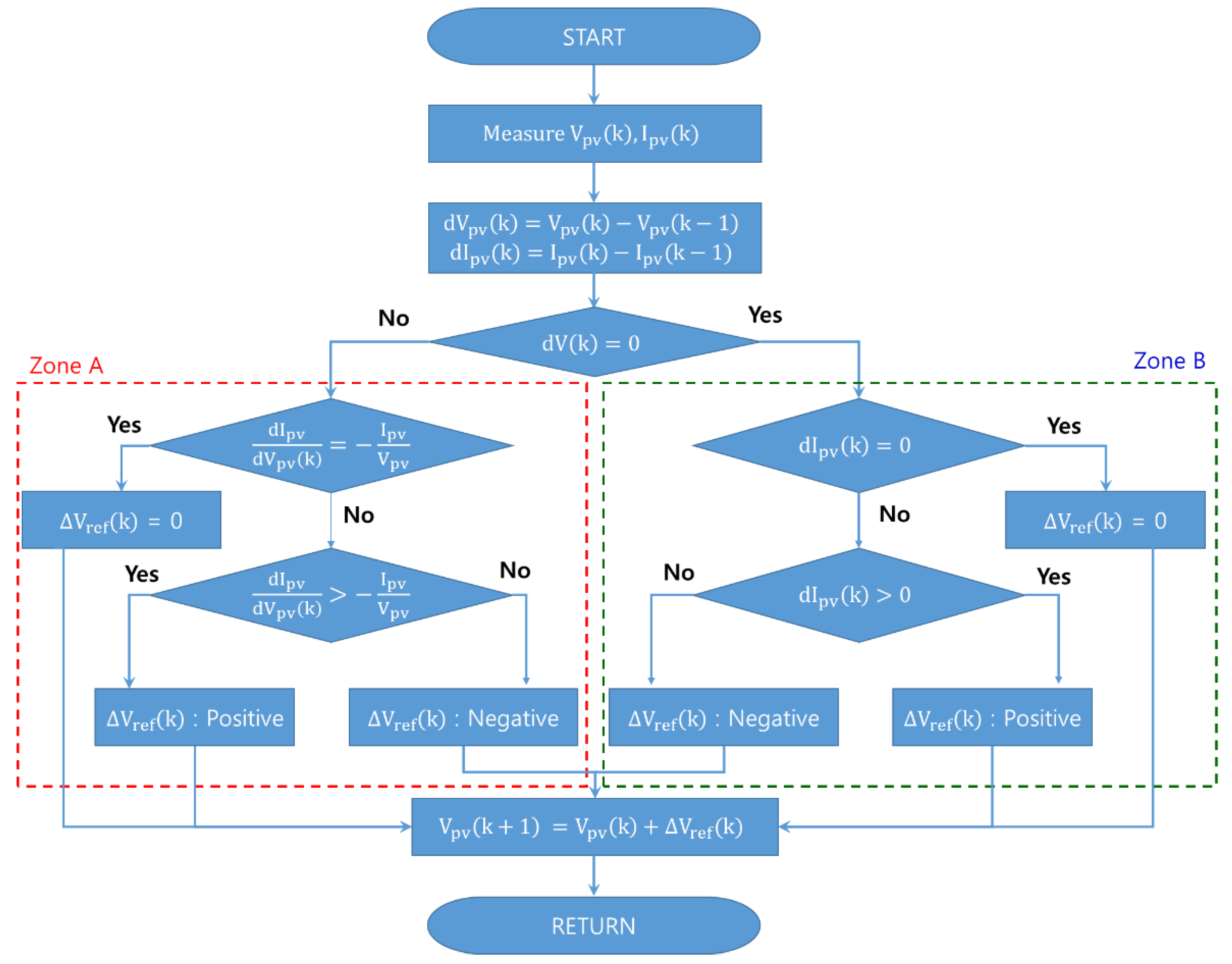
24] for maximum power point tracking. Among them, the P&O method has the advantages of simple structure and low calculation, whereas the IncCond method has the advantage of tracking the MPP faster and more accurately than the P&O. These methods are most generally used for the MPPT of the photovoltaic (PV) system due to the aforesaid advantages. Since the P&O and IncCond methods track the MPP while varying the voltage or current by a fixed size, however, vibration may occur near the MPP, and performance may deteriorate; thus rapidly changing the solar radiation conditions. Although used to solve these problems, artificial neural networks also have problems such as long learning time and high computational complexity [
25,
26].
Therefore, this paper proposes a method of tracking the MPP of the PV system using the PI controller, which is widely used to control the industrial field [
27,
28,
29,
30,
31,
32,
33]. The PI controller is a controller that uses proportional gain and integral gain. The proportional gain and the integral gain of the PI controller are closely related to the rise time, settling time, and steady-state error, and there is clear relationship between the gain and the control amount. In addition, it has a simple structure and a small amount of calculation, which enables a quick response. Since the PI controller is generally controlled with a fixed gain value, however, it is difficult to satisfy both transient and steady states. The response performance of the steady state is degraded when the gain value is increased for the fast response of the transient state, whereas, the performance of the transient state is degraded if the gain value is reduced to improve the steady-state response performance. Therefore, it is necessary to control the gain so as to satisfy both transient and steady states by automatically adjusting the gain value of the PI controller according to the operation state. In this paper, fuzzy control is used to adjust the gain of the PI controller. Methods for adjusting the gain value of PI controller using fuzzy control were presented through several studies [
34,
35,
36,
37,
38]. However, existing studies depend on designer knowledge for rule base and membership function designs and do not suggest how the gain value of a PI controller changes with its operational state. Thus, the paper proposes simple and clear fuzzy control membership function and rule base design according to the characteristics of the PV system and shows the gains of PI controller, which are changing in the transient and steady-state of the system.
Fuzzy control does not require accurate modeling and has the advantage of controlling nonlinear systems [
39]. The VGPI (variable gain proportional integral) controller proposed in this paper uses the voltage and current of photovoltaic power generation, as inputs to control the gain value of the PI controller with a fuzzy controller, and the PI controller tracks the MPP of the PV system.
The VGPI controller compares the error at tracking speed and steady state with the most commonly used P&O controller and PI controller with a fixed gain value. It also shows the characteristics of gain values of the PI controller controlled by fuzzy control in the VGPI controller.
The rest of this paper is organized as follows:
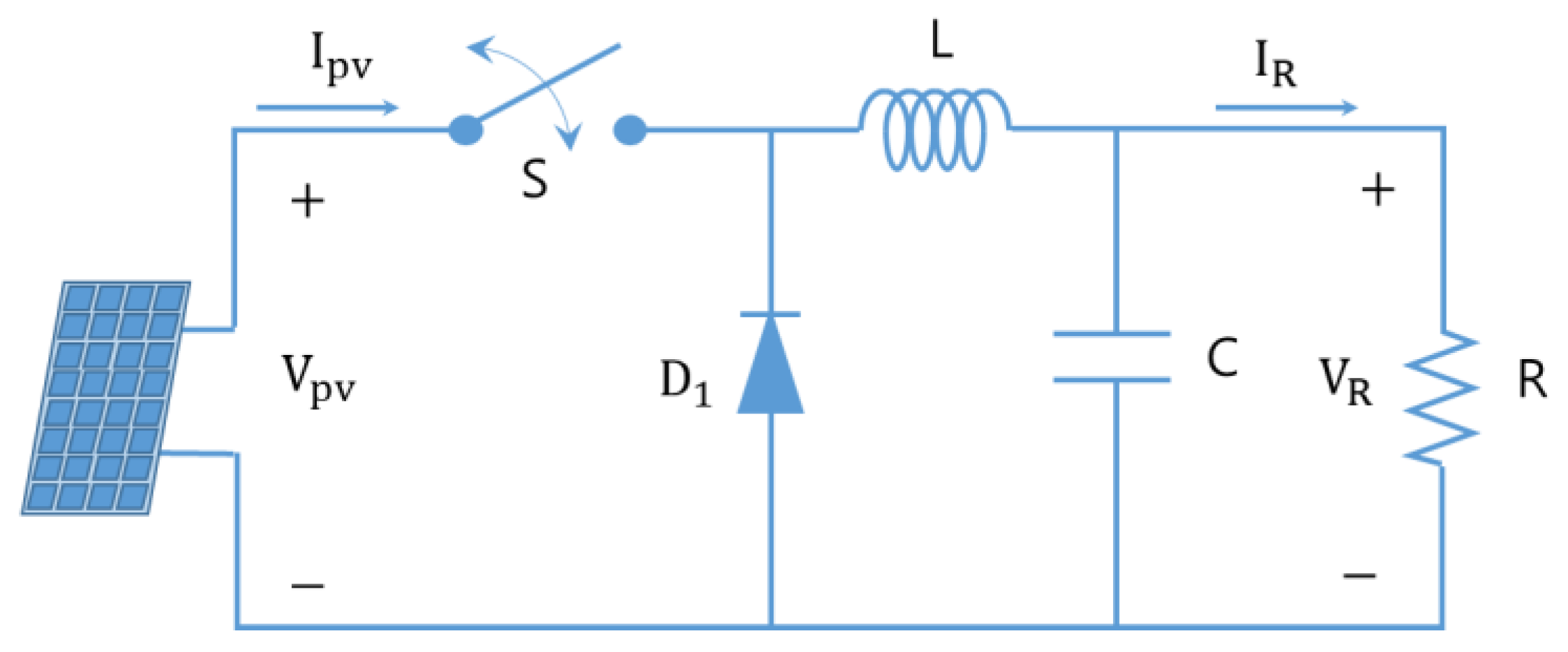
Section 2 discusses the DC-DC converter and the conventional MPPT method;
Section 3 presents the MPPT control by the VGPI controller;
Section 4 shows the comparison and analysis results of the MPPT control characteristics with the method proposed in the paper and the existing method; Finally,
Section 5 presents the conclusion.
3. Proposed MPPT Method
In this paper, a PI controller is used to track the MPP of the PV system. The PI controller is a method that uses proportional control and integral control. The PI controller uses the gain for proportional control and the gain for integral control.
Table 3 shows the effect of these gain values on the system. If large values of proportional gain and integral gain are selected to reduce the rise time and steady-state error, the overshoot may increase greatly, and the settling time may be longer. In addition, the error may increase in steady state. Generally, in the case of PI control, since two gain values are fixed, it is very important to select the gains value corresponding to the control state [
27,
49].
This paper proposes a method of adjusting the gain value of the PI controller using fuzzy control to improve this characteristic of the PI controller. Fuzzy control does not require accurate system modeling and has the advantage of handling nonlinear systems. Fuzzy control is controlled by using the rules of the “IF THEN” structure in simple language. The fuzzy controller inputs the error and the error change value to perform control through fuzzification and inferential engine defuzzification [
28]. The most common reasoning method used in the fuzzy controller is Mamdani’s MIN-MAX method. The “IF THEN” rule for multiple inputs has “AND” and “OR” operations, and it can be expressed as follows [
4]:
where
represents the membership strength of the fuzzy membership function for input
. Various methods of adjusting the gain value of the PI controller using fuzzy control have been proposed. These methods are based on user knowledge in designing Fuzzy Control’s membership functions and rule base and do not represent the background to design. This approach has the problem of redesigning membership functions and rule bases for other users to use.
Therefore, in this paper, using the operating characteristics for the gain value of the PI controller, a simpler and easier-to-understand controller is designed. Member functions and rule bases designed in the paper are based on the following:
Error and changing error which is the input of fuzzy control, are as shown in expressions (19) and (20).
The error and the changing error decrease in size as solar power is closer to the MPP.
If the input value is large, the tracking speed should be fast because it is far from the MPP. This increases the gain value of the PI controller.
If the input value is small, it is close to the MPP and the error in steady state must be reduced.
This reduces the gain value of the PI controller.
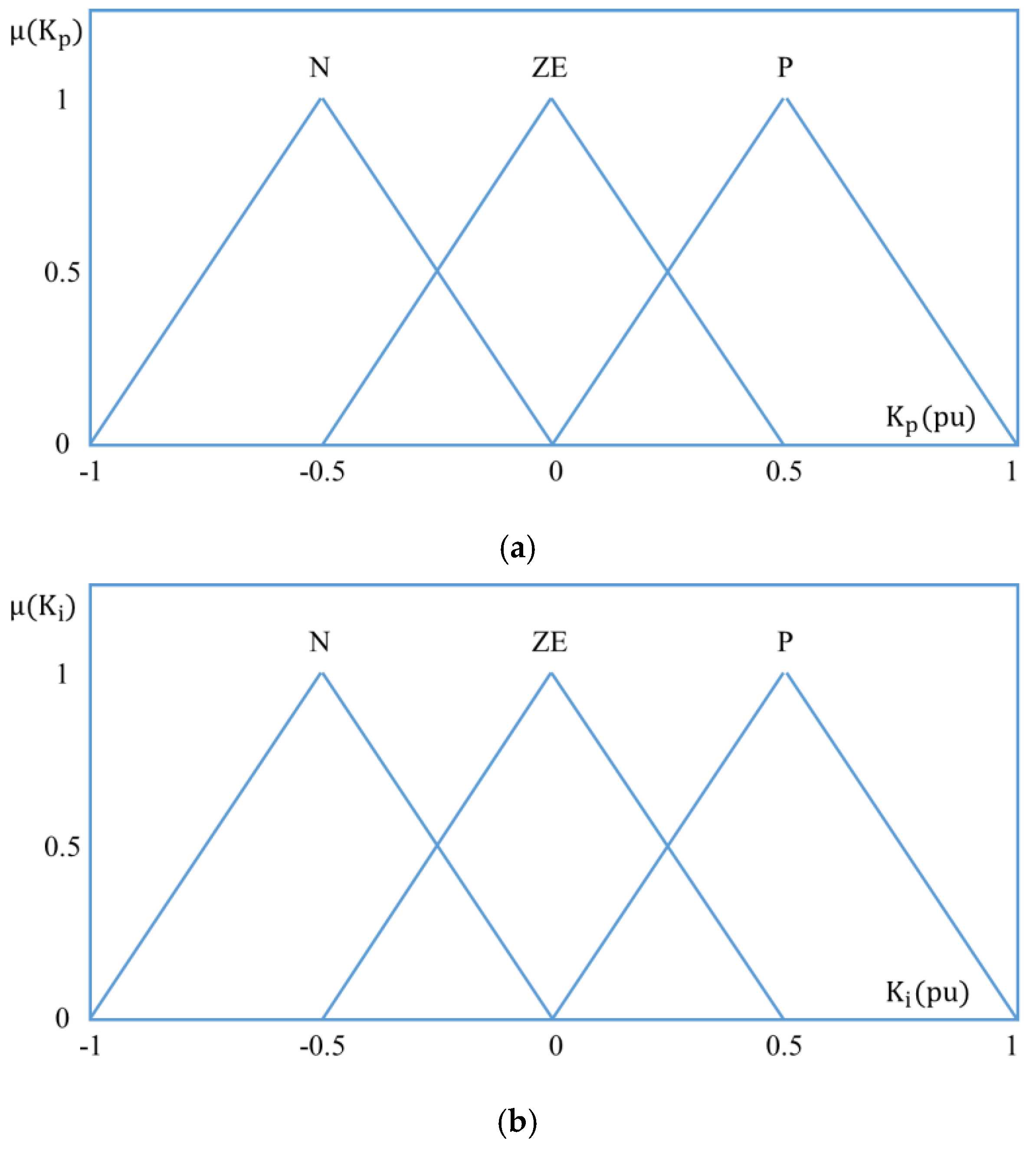
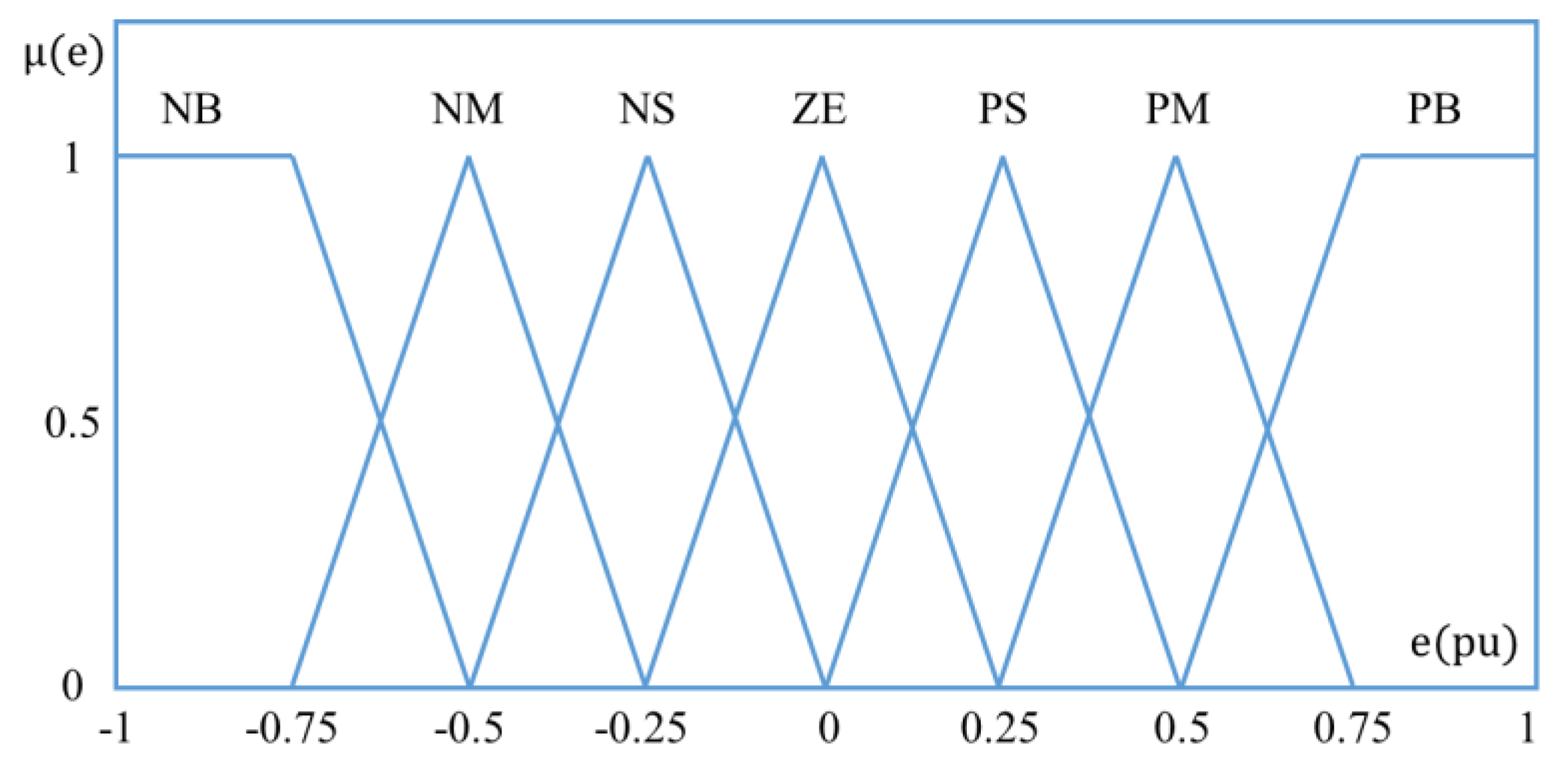
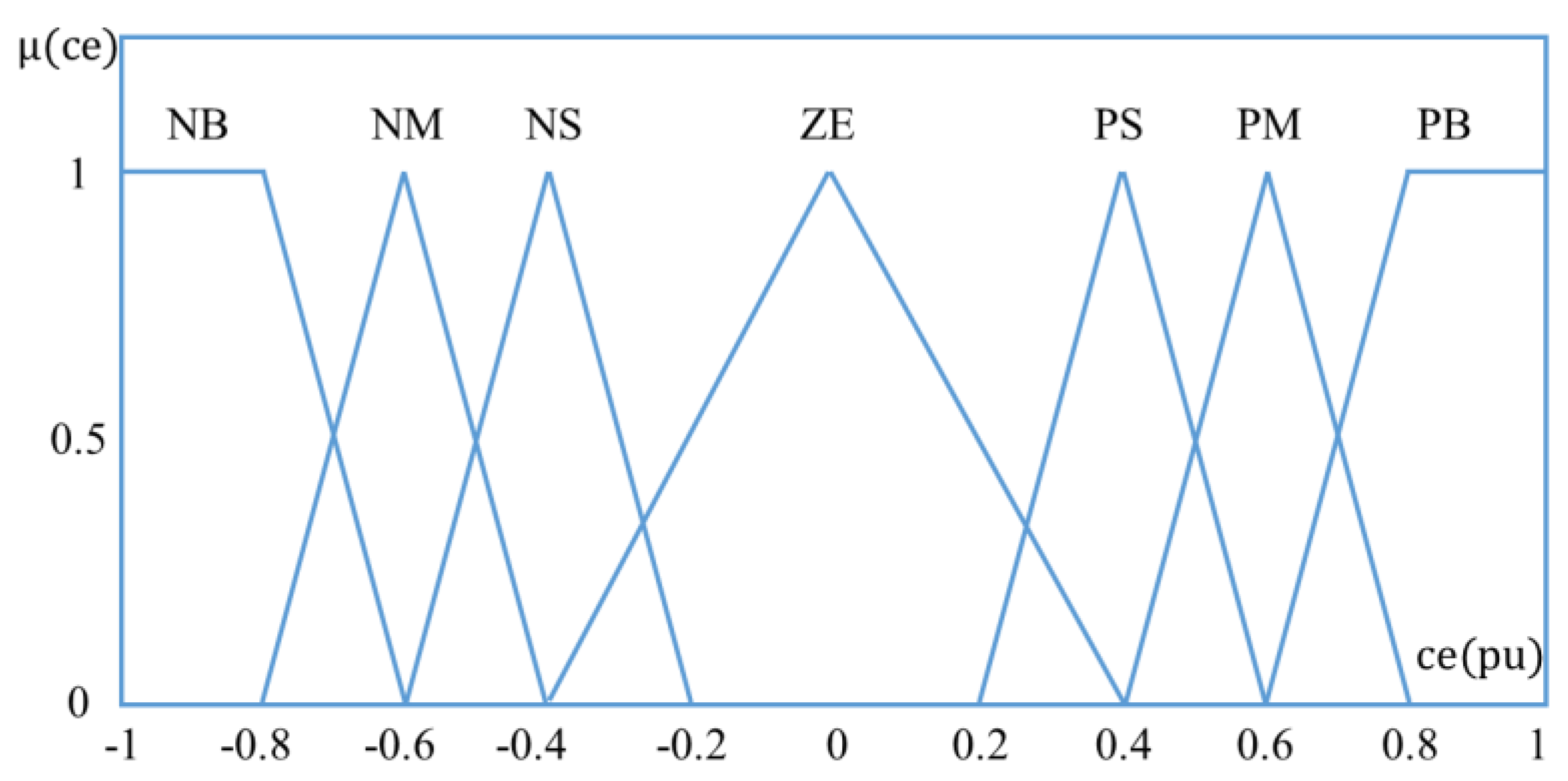
The input of fuzzy control, error and error variation, are divided into seven sections: Negative big (NB), Negative medium (NM), Negative small (NS), zero(ZE), Positive big (PB), Positive medium (PM) and positive small (PS). The output of the fuzzy control is designed to perform three actions: increase (P: positive), hold (ZE: zero) and decrease (N: negative).
Table 4 and
Table 5 show the rule base for proportional gain (
) and integral gain (
) designed in the paper, and
Figure 8,
Figure 9 and
Figure 10 show membership function for the input and output of fuzzy control.
Equations (21)–(24) show the gain of the PI controller adjusted by the fuzzy controller. Outputs
and
of the fuzzy controller are calculated using the center of gravity (COG) [
27,
50]:
Figure 11 shows an example of the input error (0.7) and changing error (0.3) of fuzzy control. When the error and error change values are calculated, the membership strength is calculated from the membership functions shown in
Figure 8 and
Figure 9. In the membership function for error 0.7, the membership strength is 0.8 for PM and 0.2 for PB. For changing error 0.3, the strength of membership is calculated for the membership function, which is 0.5 for ZE and 0.25 for PS. Four output values are calculated through the AND operation of Equation (17) and the rule base of
in
Table 4, and 0.413 can be obtained by calculating the final values through Equation (23).
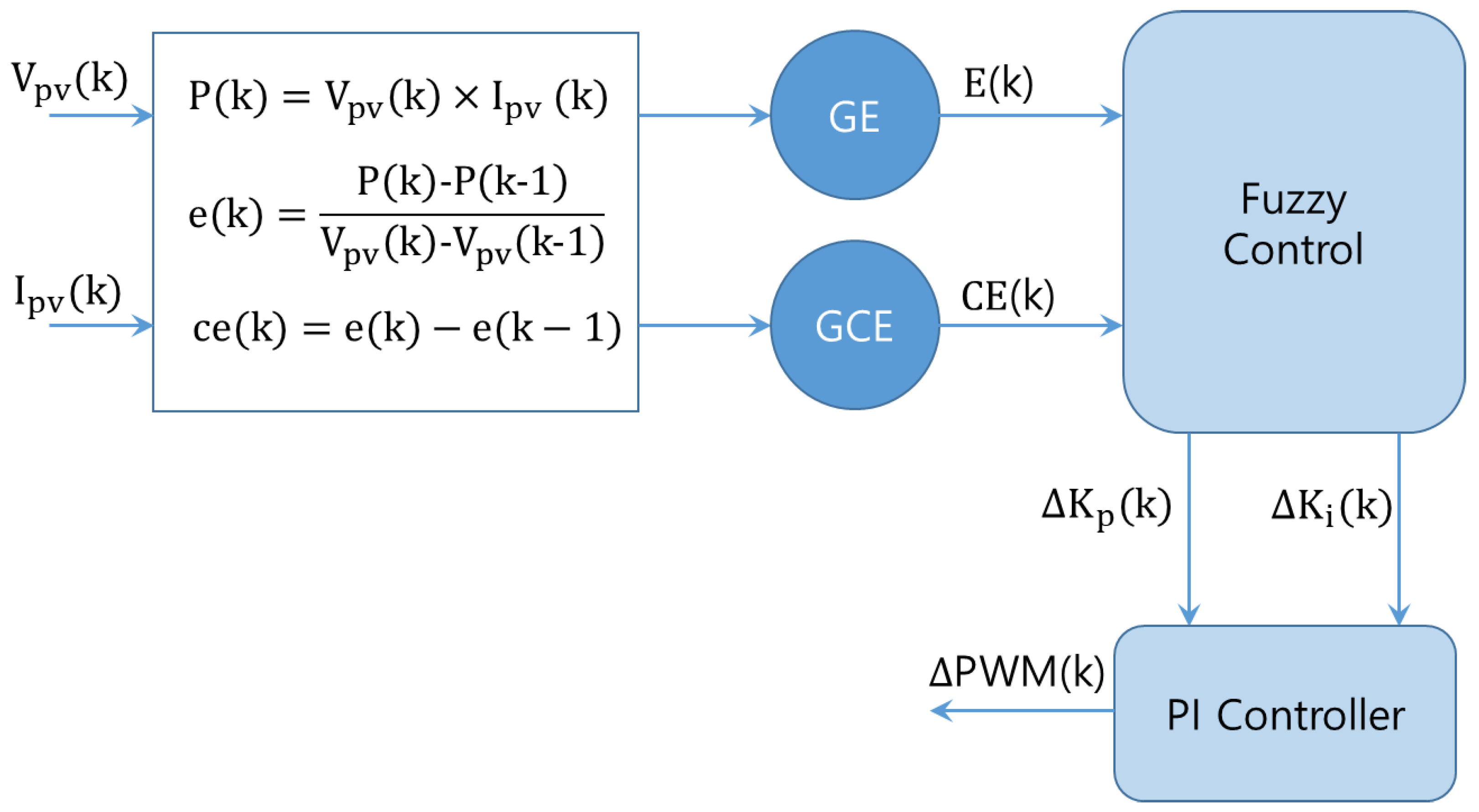
Figure 12 shows the structure of the VGPI controller for MPPT control of the PV system. The inputs are the voltage (
) and current (
) of the PV system, and the output is the change value of the PI controller gain value (
,
) through the fuzzy controller. The PI controller outputs the PWM (Pulse Width Modulation) signal for MPPT control using the adjusted gains by fuzzy control, and this signal controls the DC-DC converter.
4. Experiment Result
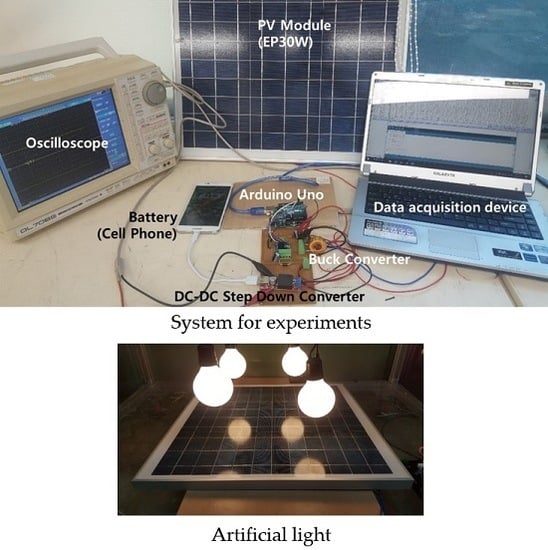
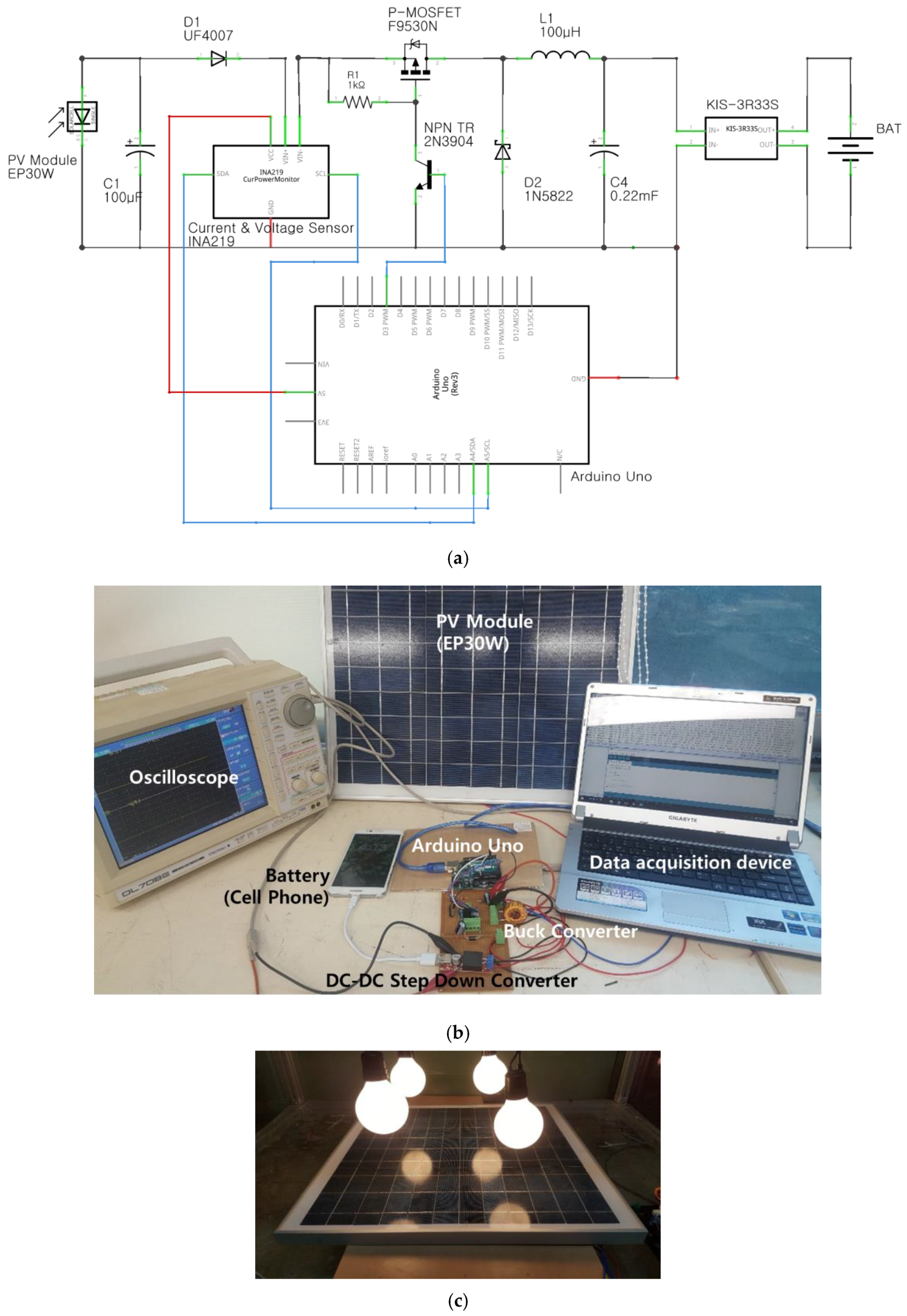
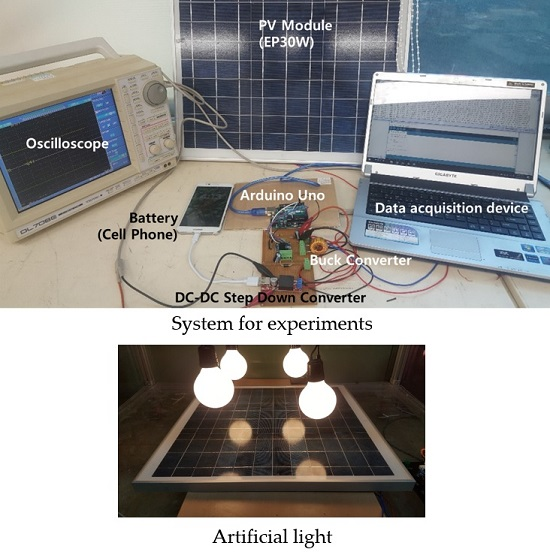
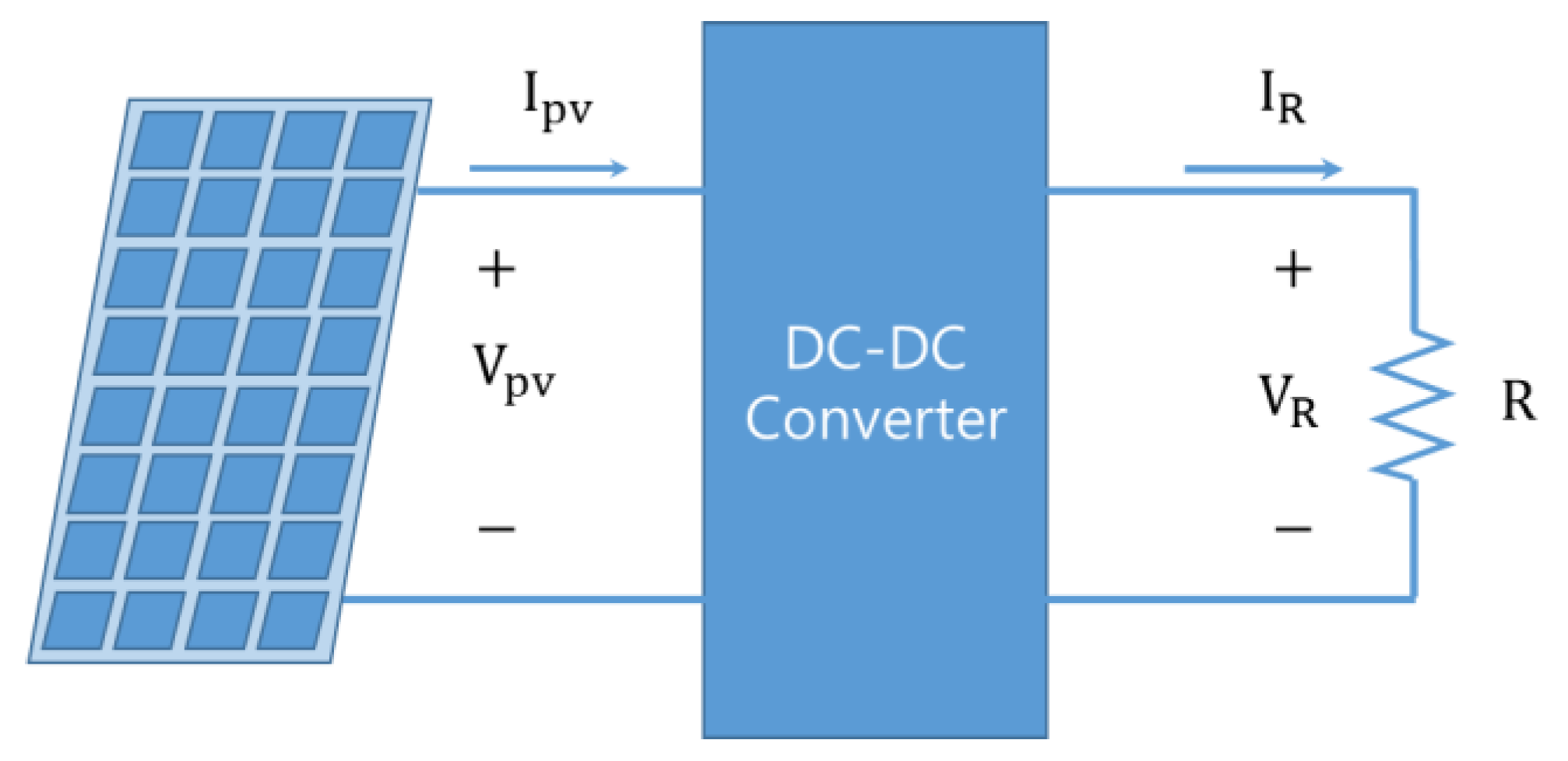
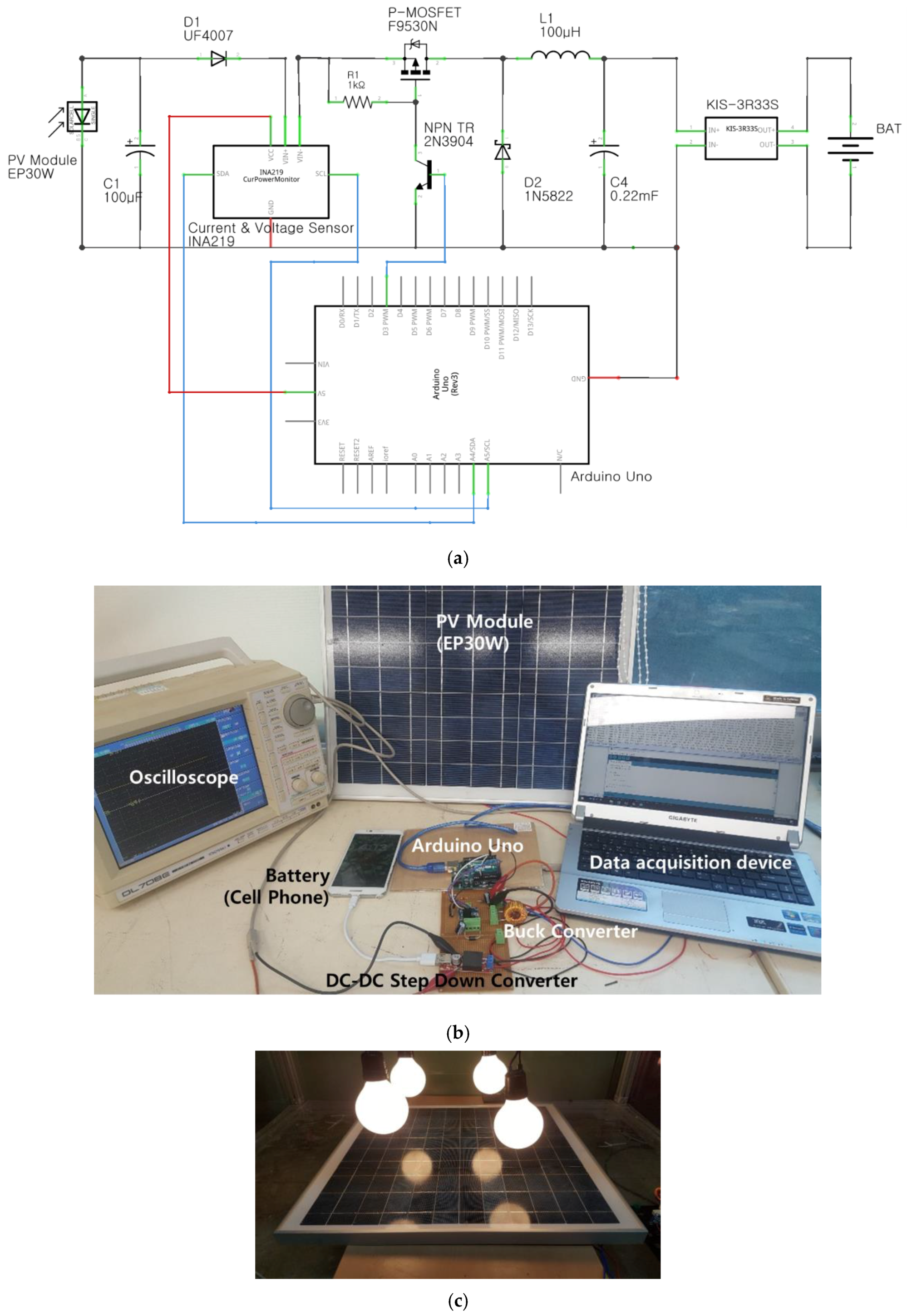
The control performance of MPPT is verified by the speed at which maximum power is tracked and the magnitude of the error in steady state using voltage, current and power output from the PV module. In order to verify MPPT’s performance in the paper, the experimental device was constructed with a PV module, a Buck converter, a DC-DC step down converter and a battery.
Experiments in solar power use solar simulators or use artificial light sources to construct a constant experimental environment. In the paper, a constant experimental environment was constructed using artificial lighting. Artificial light sources in the experimental environment can be used to maintain or change the test conditions. In addition, the same environmental conditions can be configured for different methods, so that the performance of the proposed method and the conventional method can be compared. The proposed method and conventional method compare the speed at which the maximum power point is tracked and the error at steady state. Since the environment is constructed using the same artificial light source, comparisons of output power, voltage and current can be a valid method for verifying peak power point tracking performance [
51,
52,
53,
54].
Figure 13 shows the circuit diagram and control system for the MPPT control performance test of solar power generation. In this paper, MPPT control is controlled by the buck converter, and voltage and current are measured using the INA219 voltage current sensor. Switching of the buck converter was performed using P-channel MOSFET (F9530N) for high-side switching of the buck converter. P-channel MOSFET has a switching state of “on” when a "low" signal is inputted to the gate, so the NPN transistor (2N3904) and pull-up resistor (1 kΩ) are used to control the buck converter.
DC-DC step down converter (KIS-3R33S) was used to maintain constant voltage for changes in the voltage of solar power, and the cell phone battery was charged.
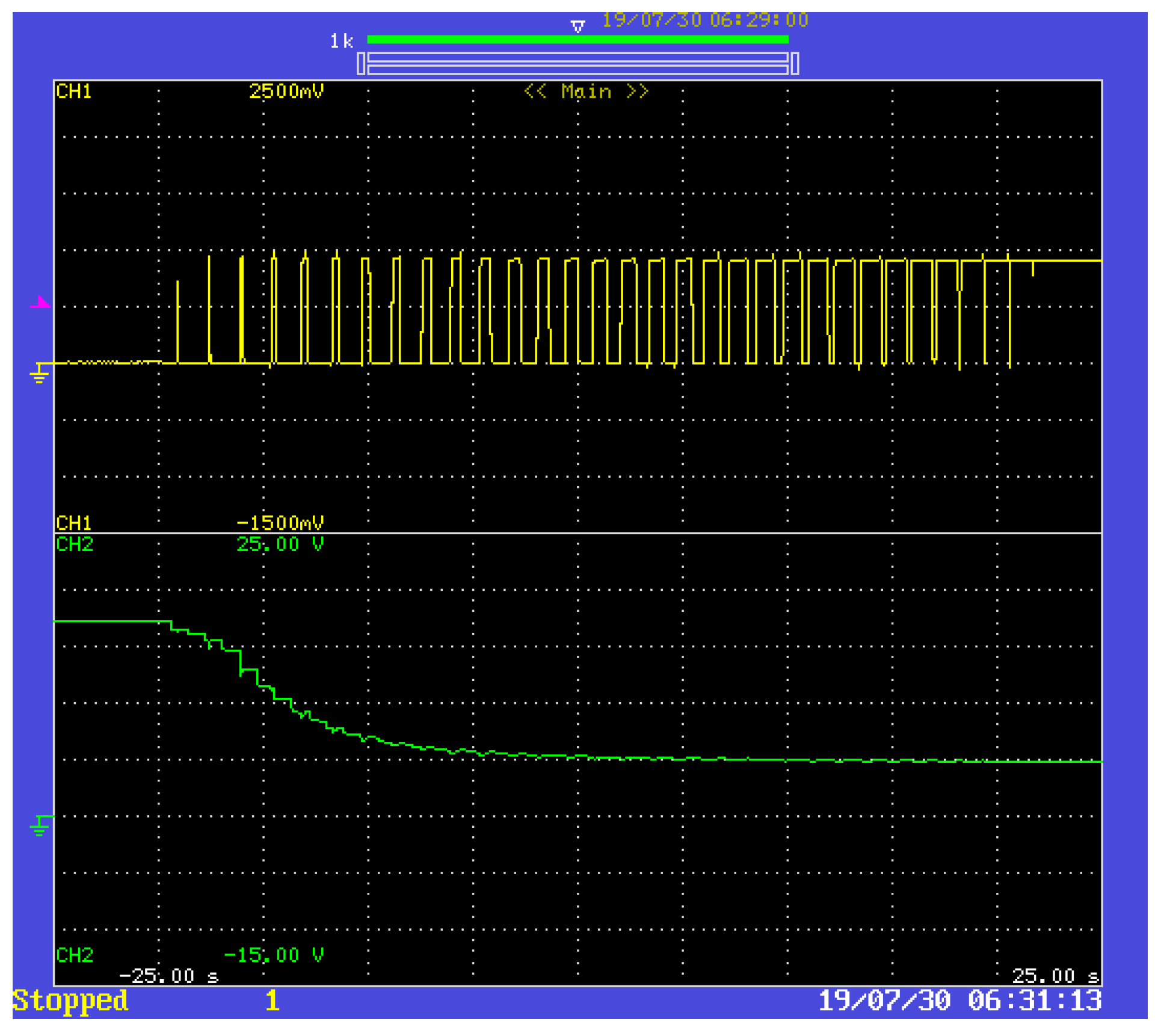
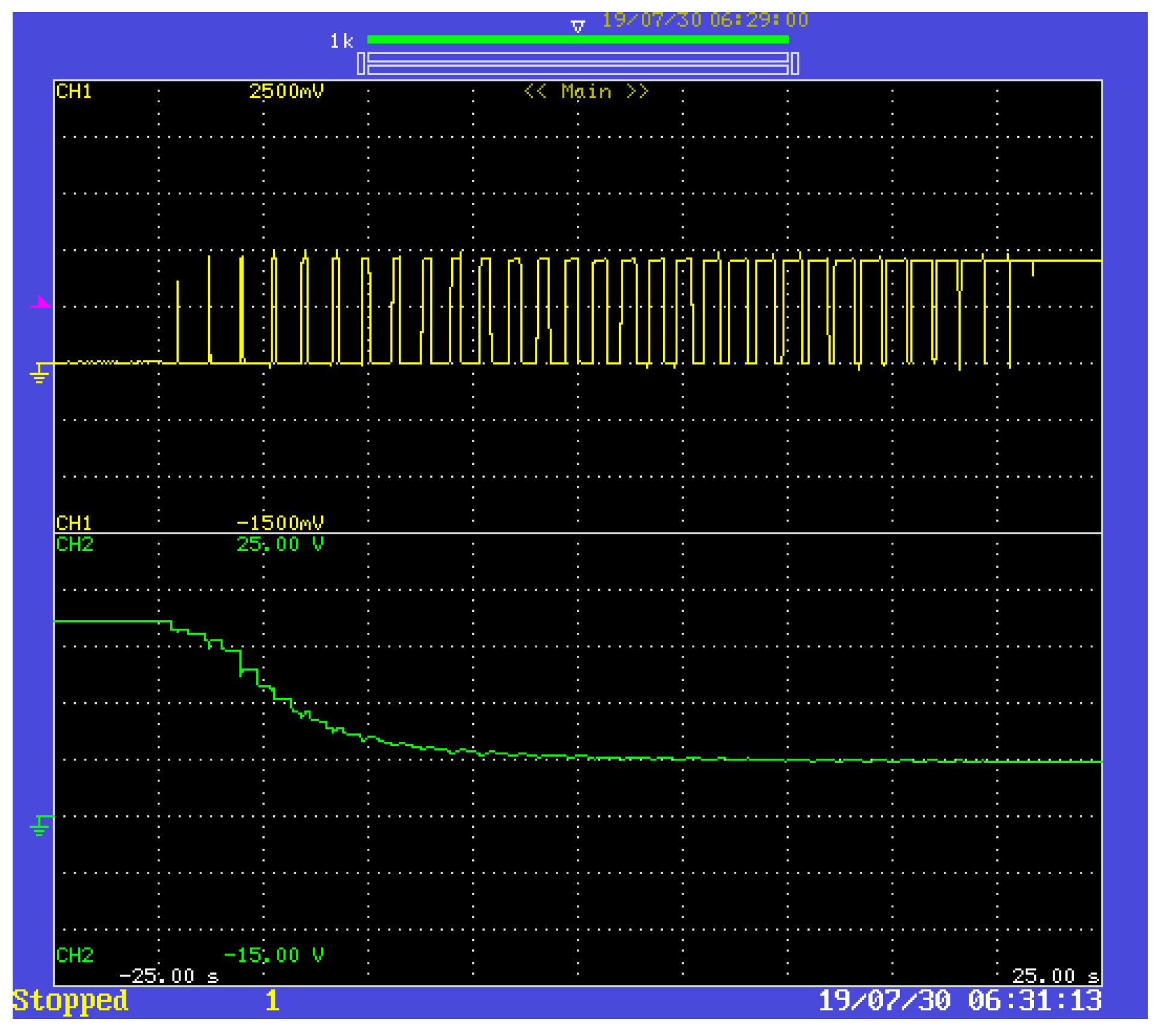
Figure 14 shows the change of output voltage according to PWM signal of Buck Converter. When MPPT control is performed using a buck converter, the voltage gradually decreases from the open-circuit voltage to the load voltage according to the PWM signal. In
Figure 14, CH1 represents the PWM signal output from the controller, and CH2 denotes the voltage change of the PV module. The switching frequency of the controller used is 3.9 [kHz].
Figure 15,
Figure 16 and
Figure 17 show the response characteristics of the VGPI, PI, and P&O methods under constant solar irradiation conditions.
The PI controller used for comparison with VGPI uses 0.035 for proportional gain () and 0.005 for integral gain (). Arduino’s PWM ranges from 0 to 255, with 0 representing 0% and 255 representing 100% duty ratio. The P&O controller adjusts the PWM to a fixed size 3 to regulate the voltage at a constant rate.
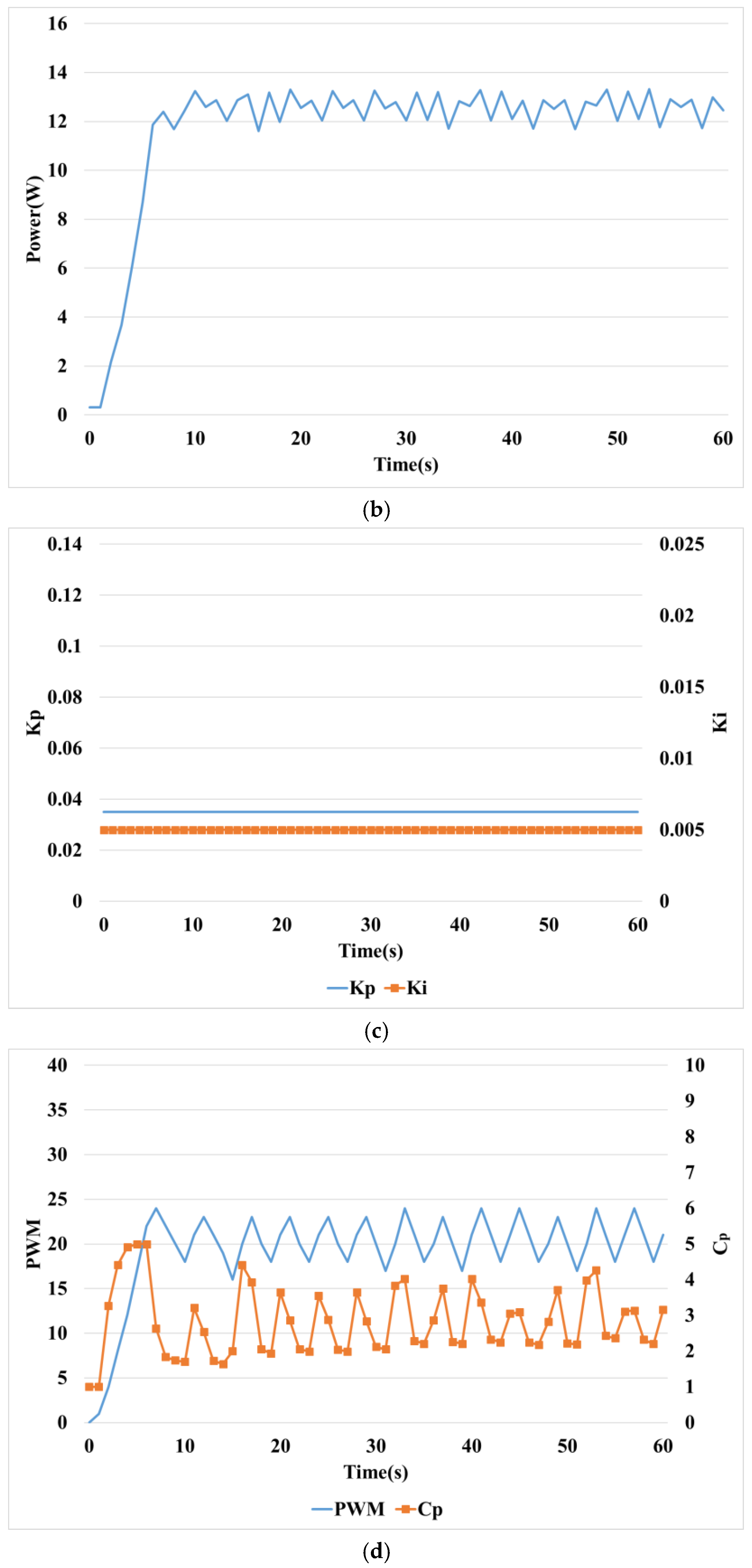
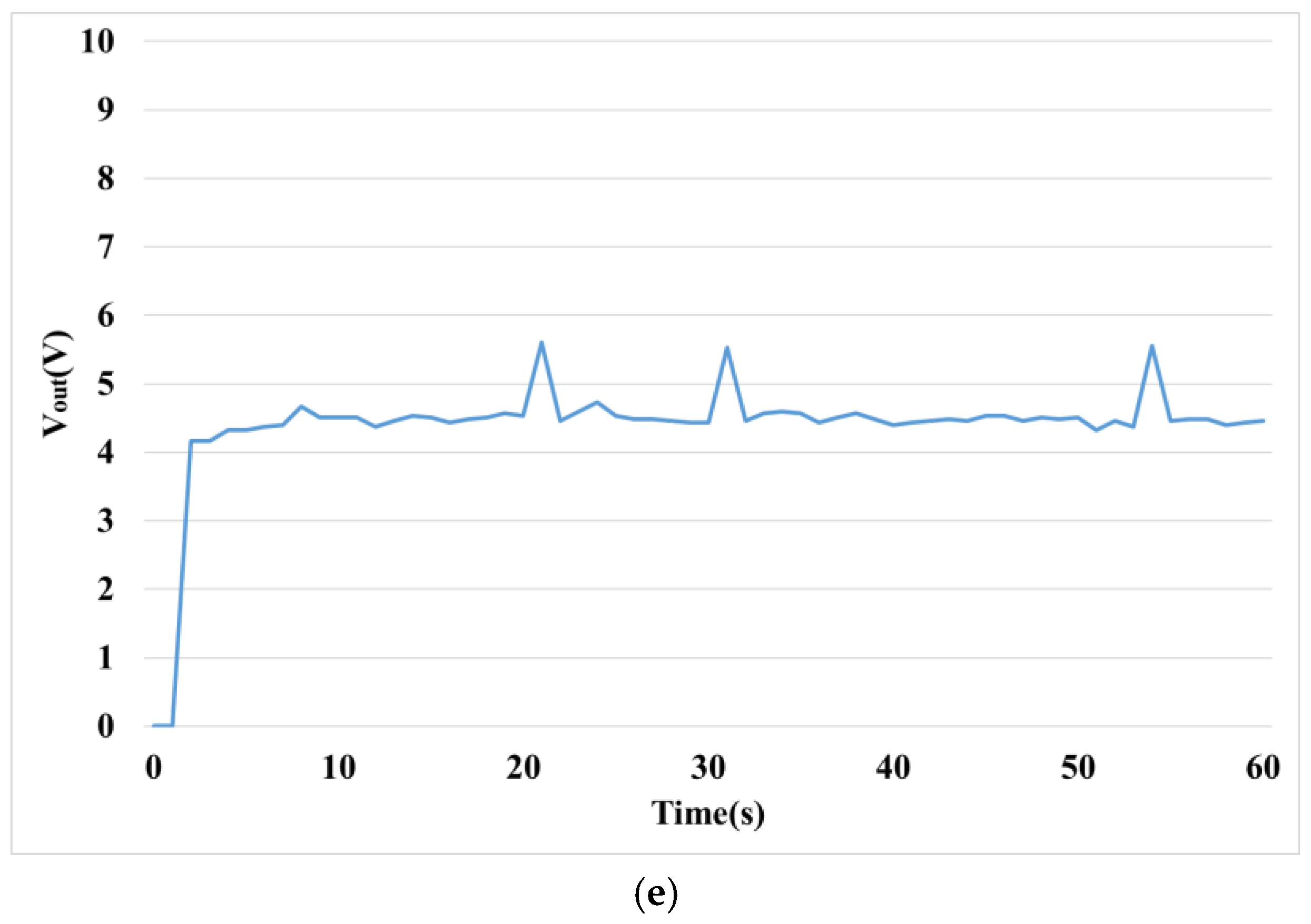
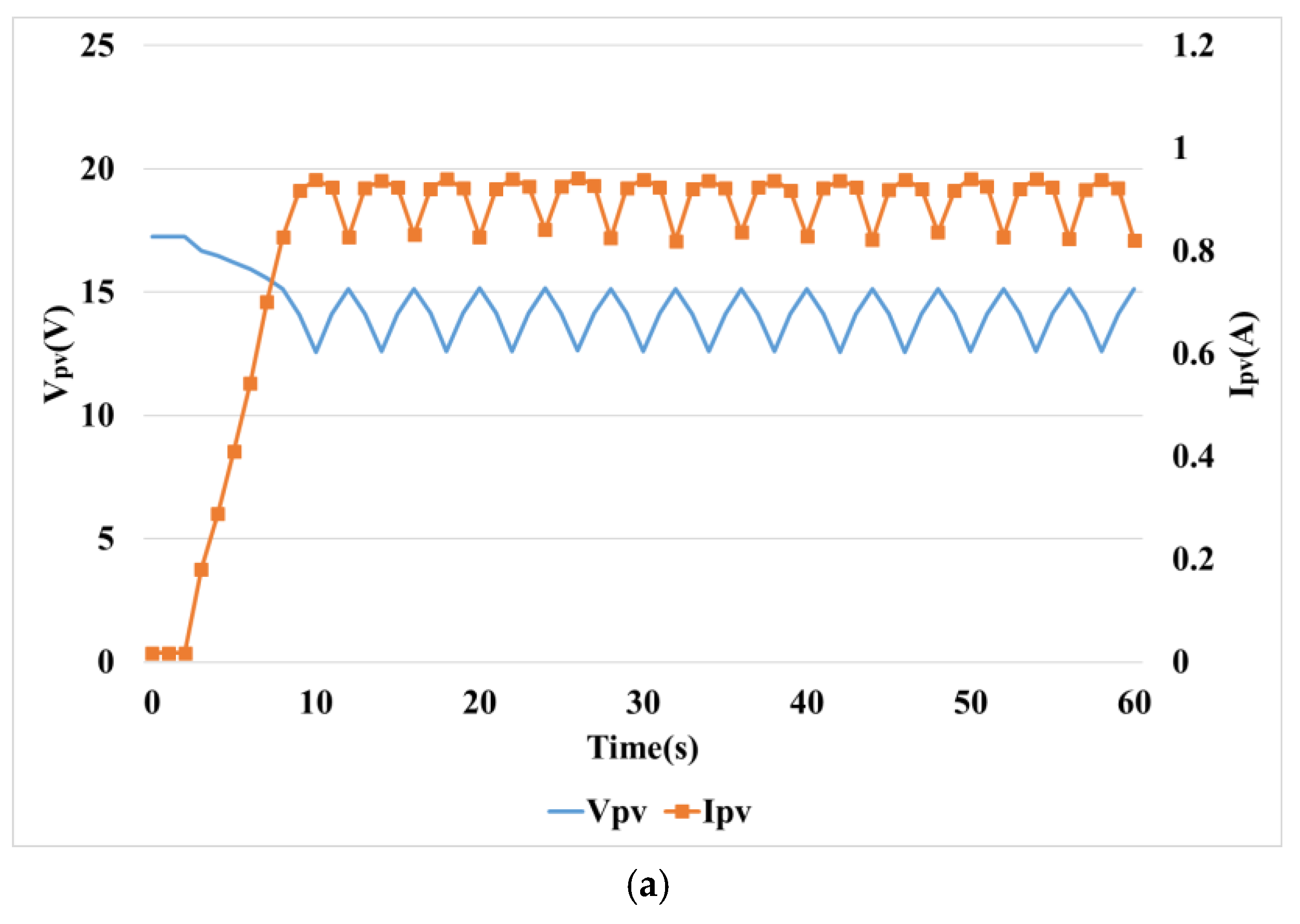
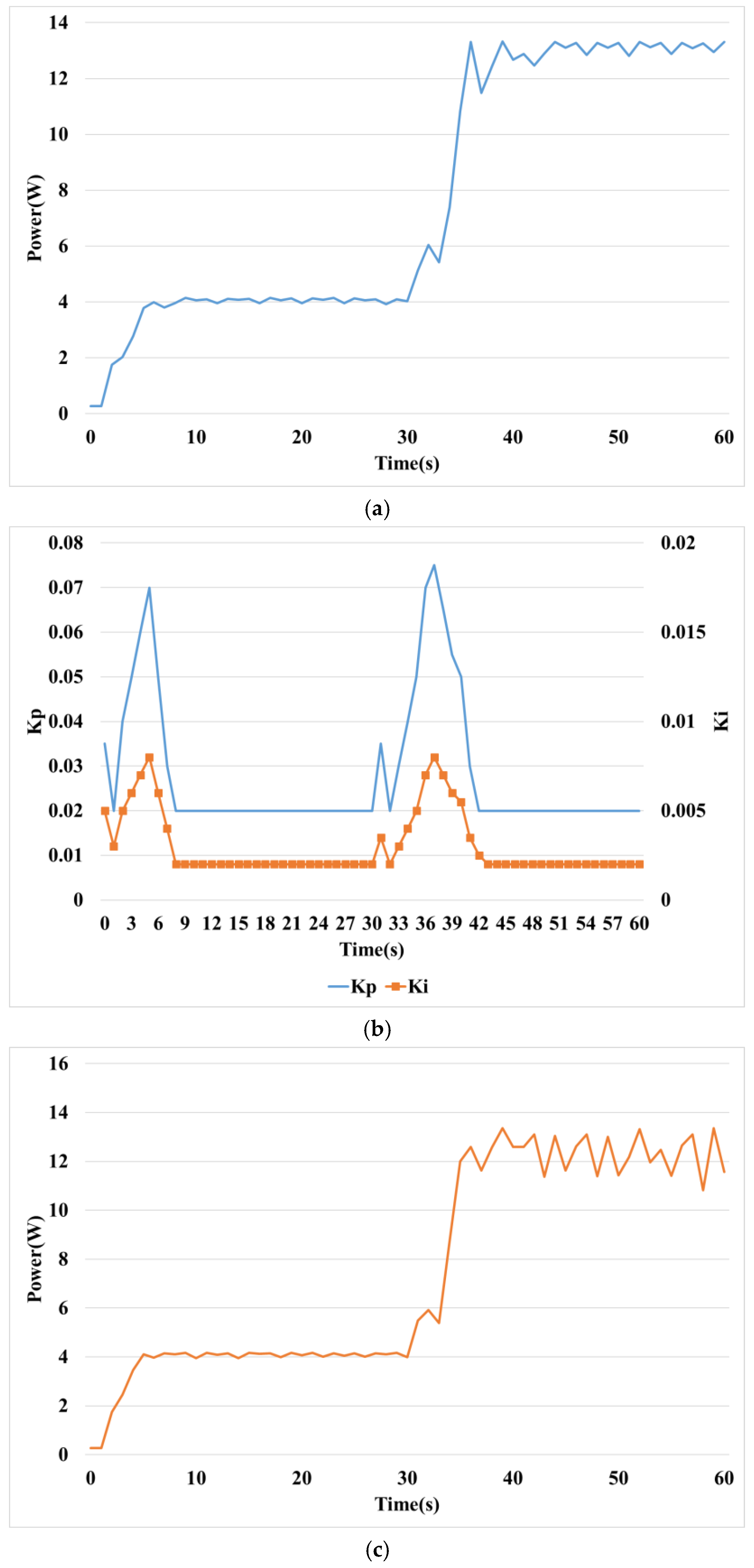
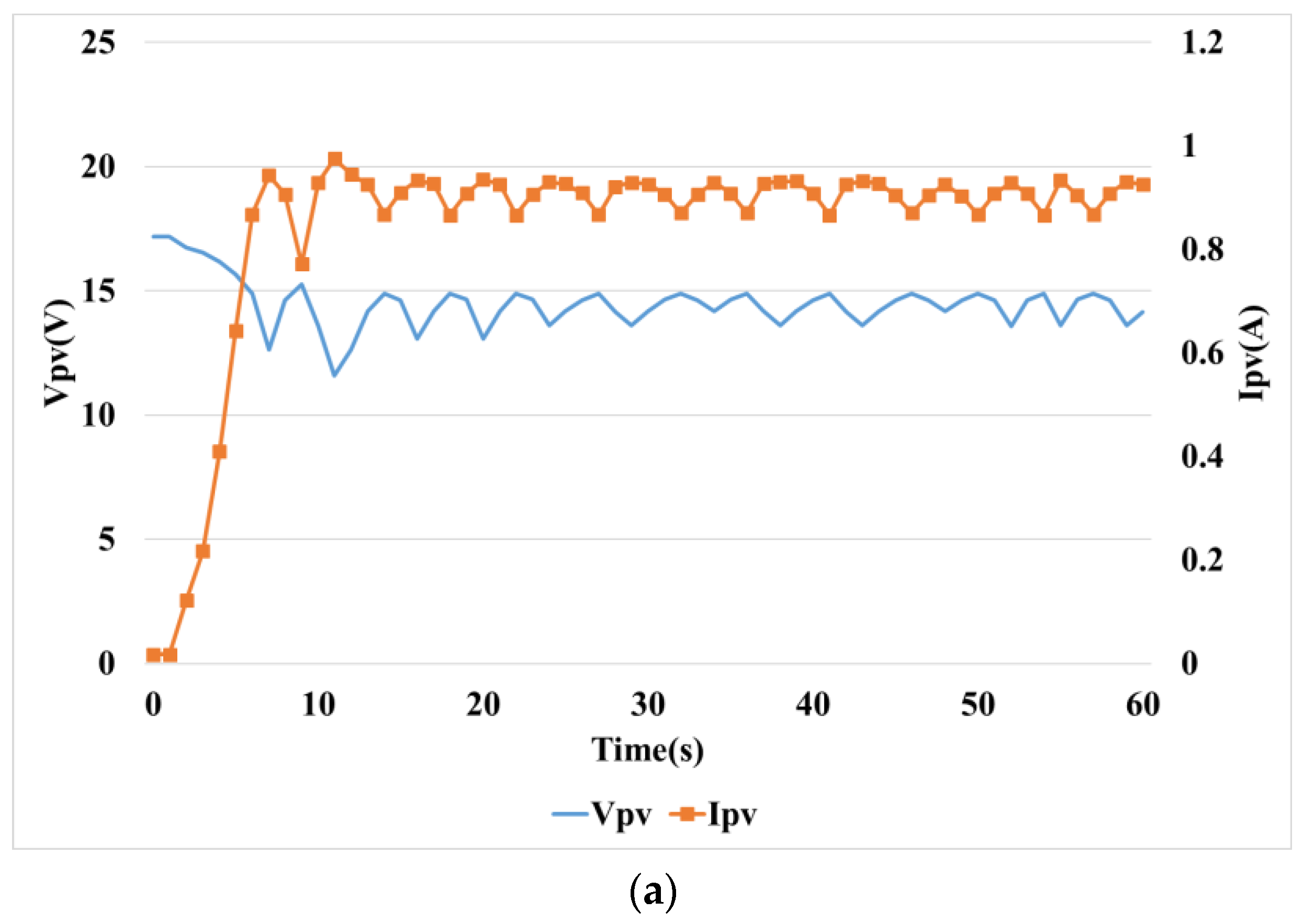
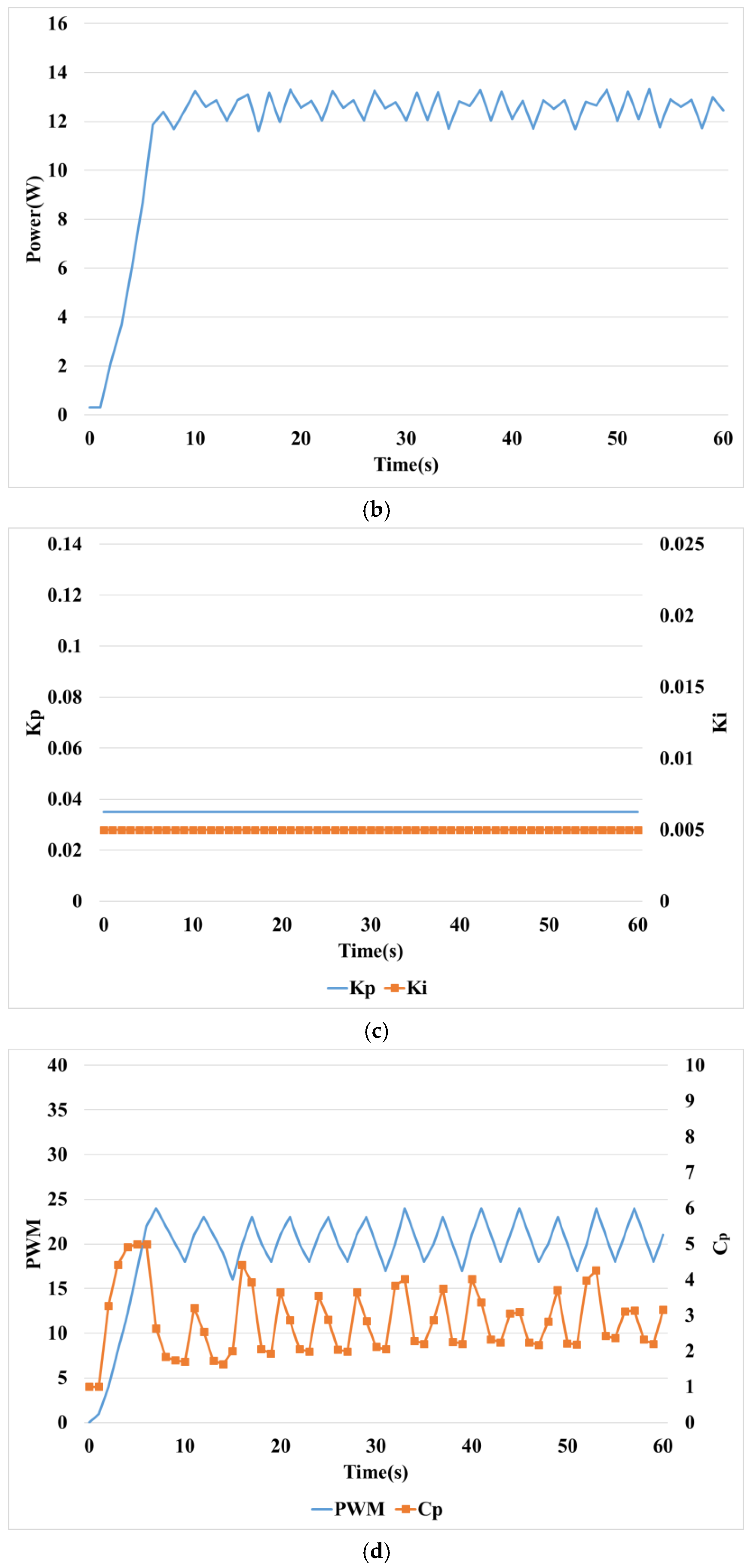
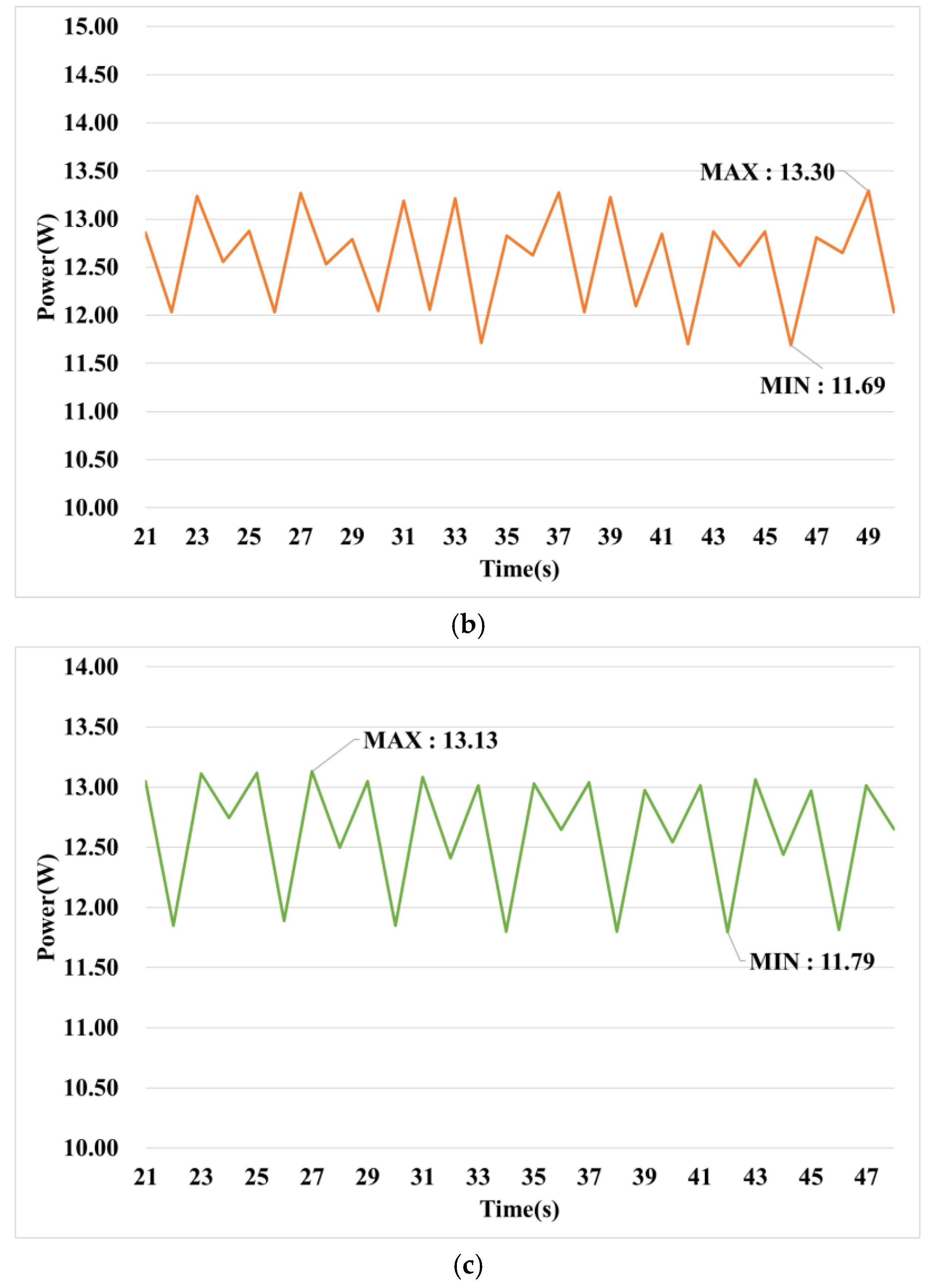
In
Figure 15,
Figure 15a shows the voltage and current,
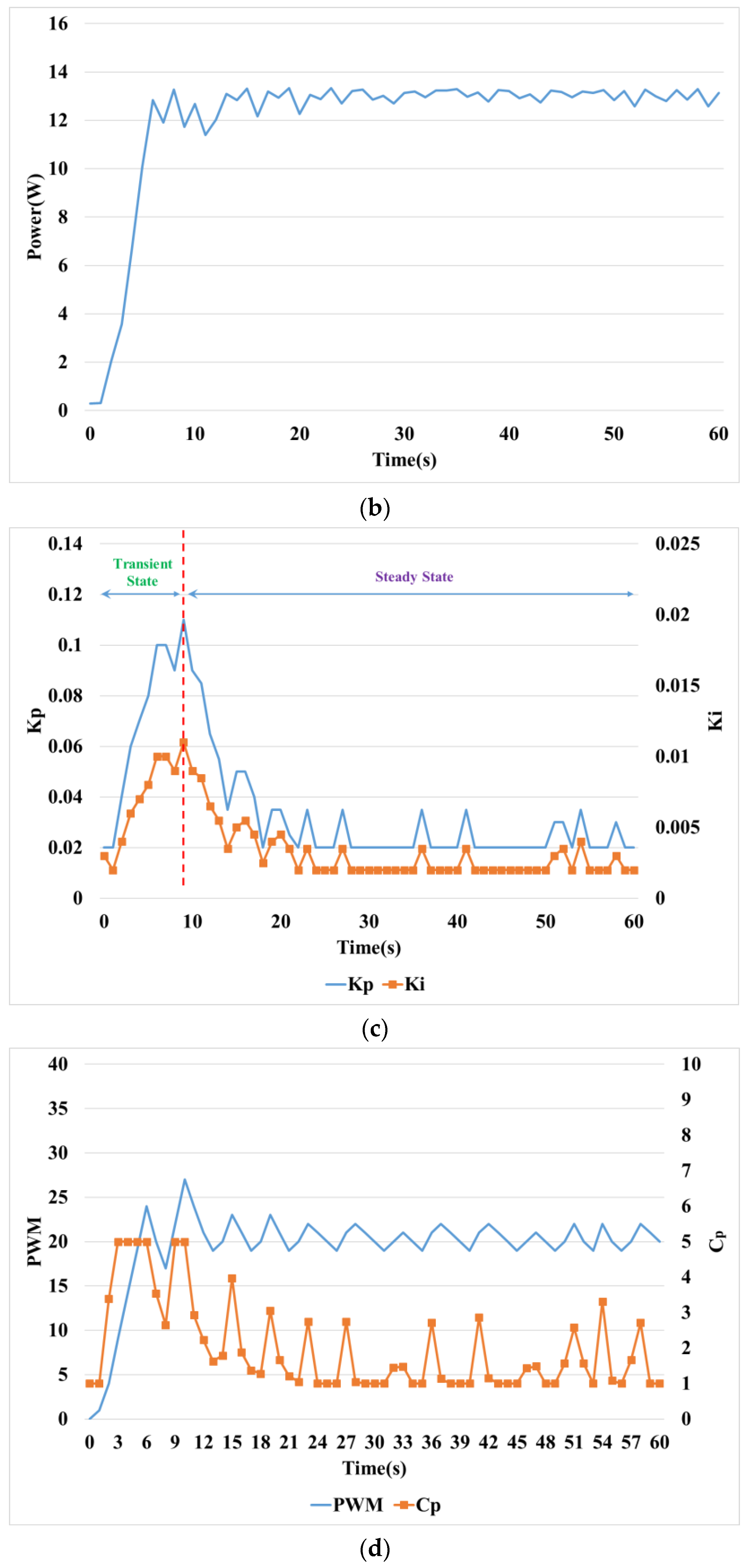
Figure 15b presents the output power,
Figure 15c illustrates the gain of the PI controller controlled by fuzzy control,
Figure 15d shows the control value (
) and PWM signal for switching control of the DC-DC converter and
Figure 15e is output voltage controlled by step down converter. The gain of the PI controller in (C) is increased for fast tracking in transient state, and the gain value is decreased for improving accuracy and stability in steady state. The control value (
) for tracking the MPP increases as the gain of the PI controller is adjusted according to the operating state and decreases in steady state. As a result, the variation of the PWM signal for switching of the DC-DC converter is reduced, and the power ripple is reduced; thus enabling more accurate MPPT. The output voltage in
Figure 15e remains constant even as the voltage of solar power changes.
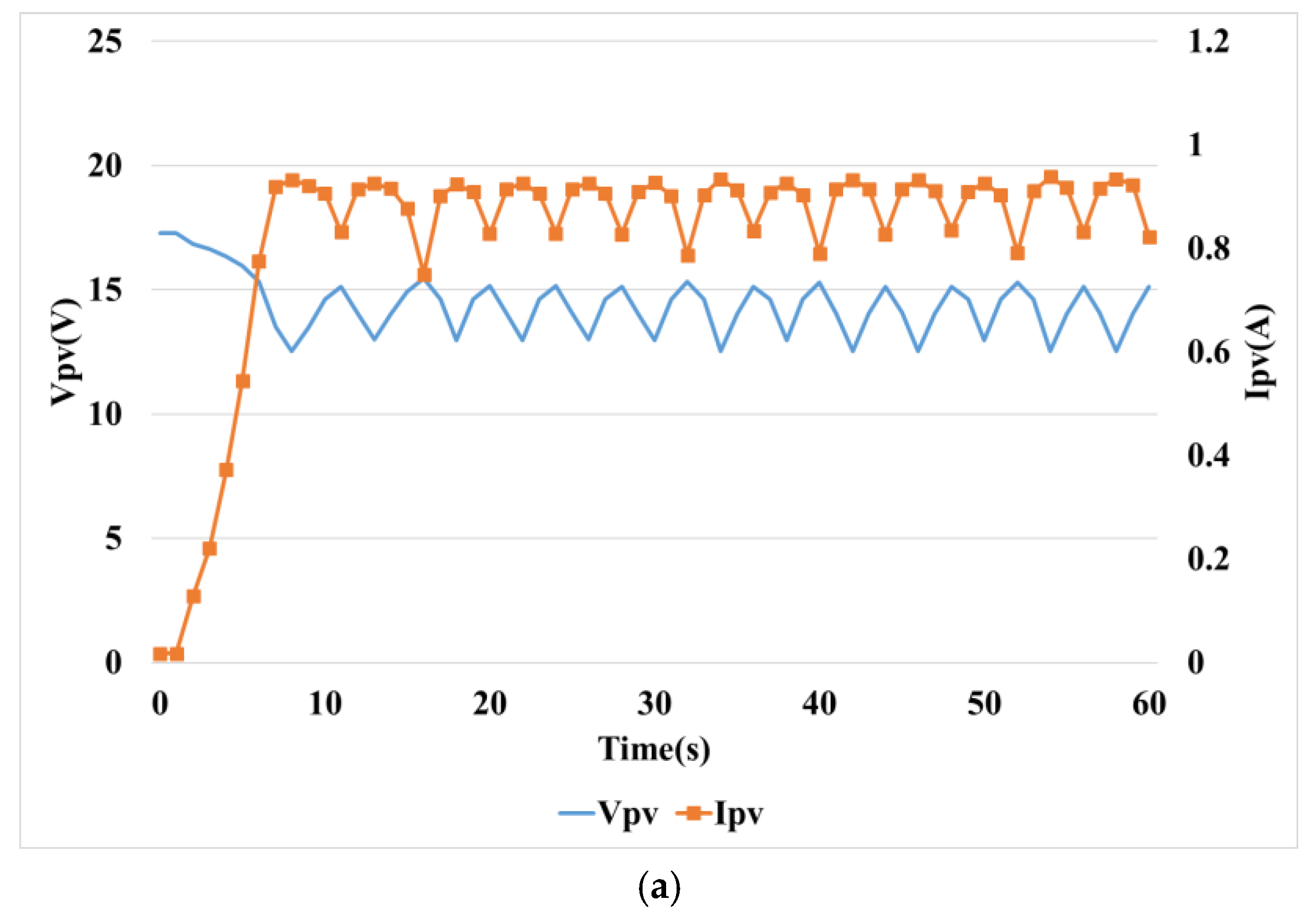
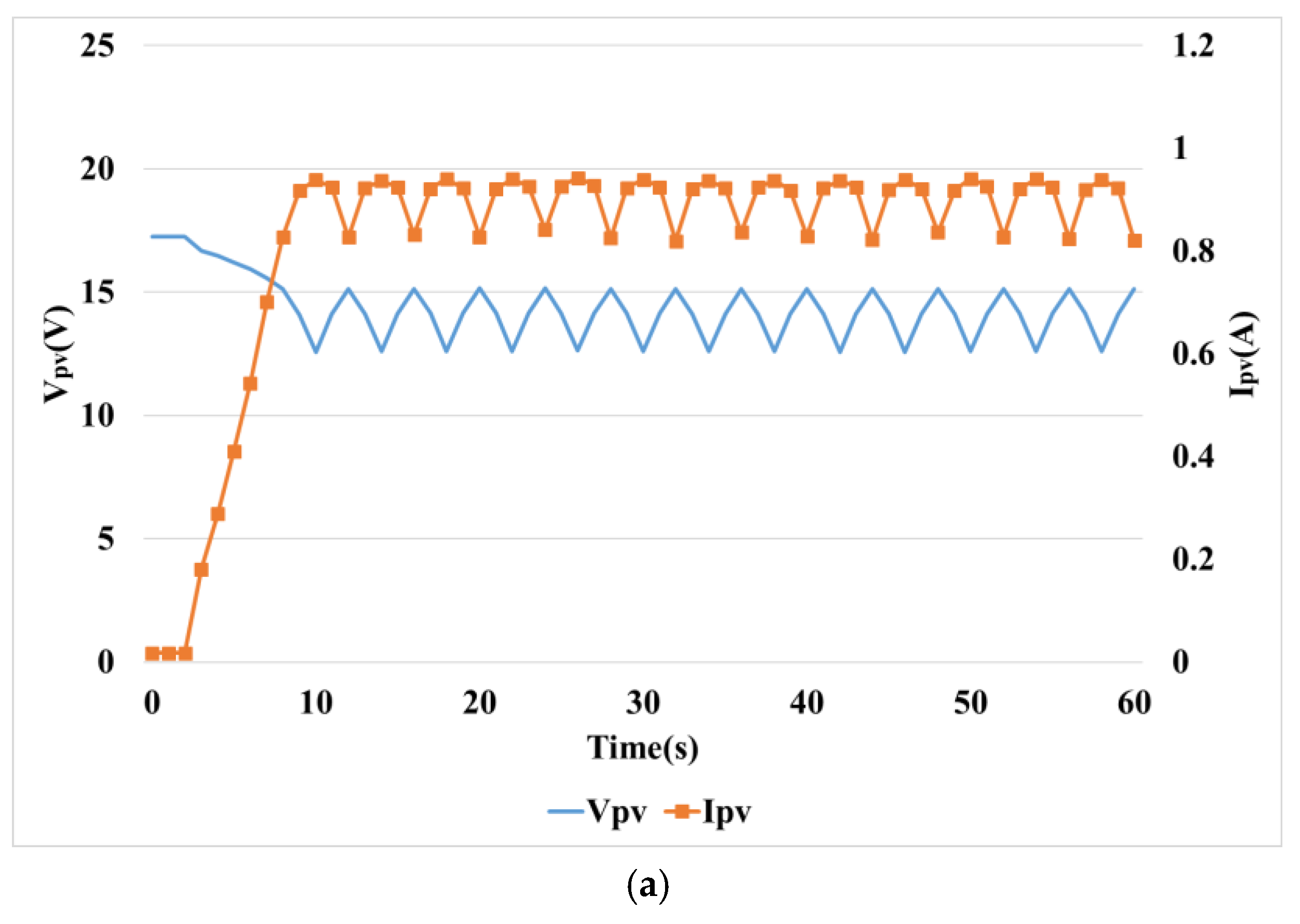
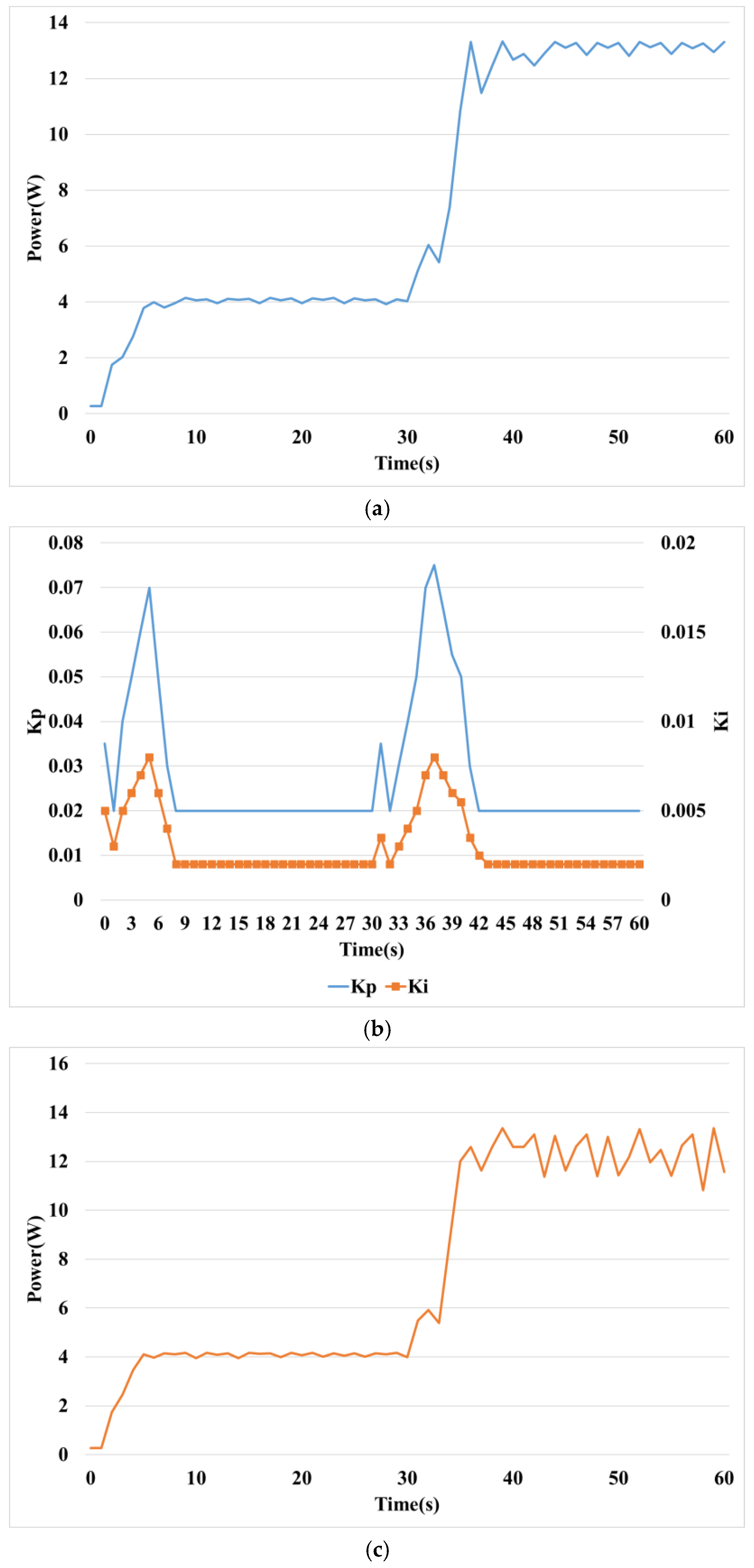
Figure 16 shows the response performance of the MPPT control of photovoltaic power generation using the PI controller. In particular,
Figure 16c shows the fixed gain of the PI controller. Although the PWM signal and the control value (
) of
Figure 16d are controlled according to operating state by PI control, the ripple of the output power increases because it is larger than the value of
Figure 15d.
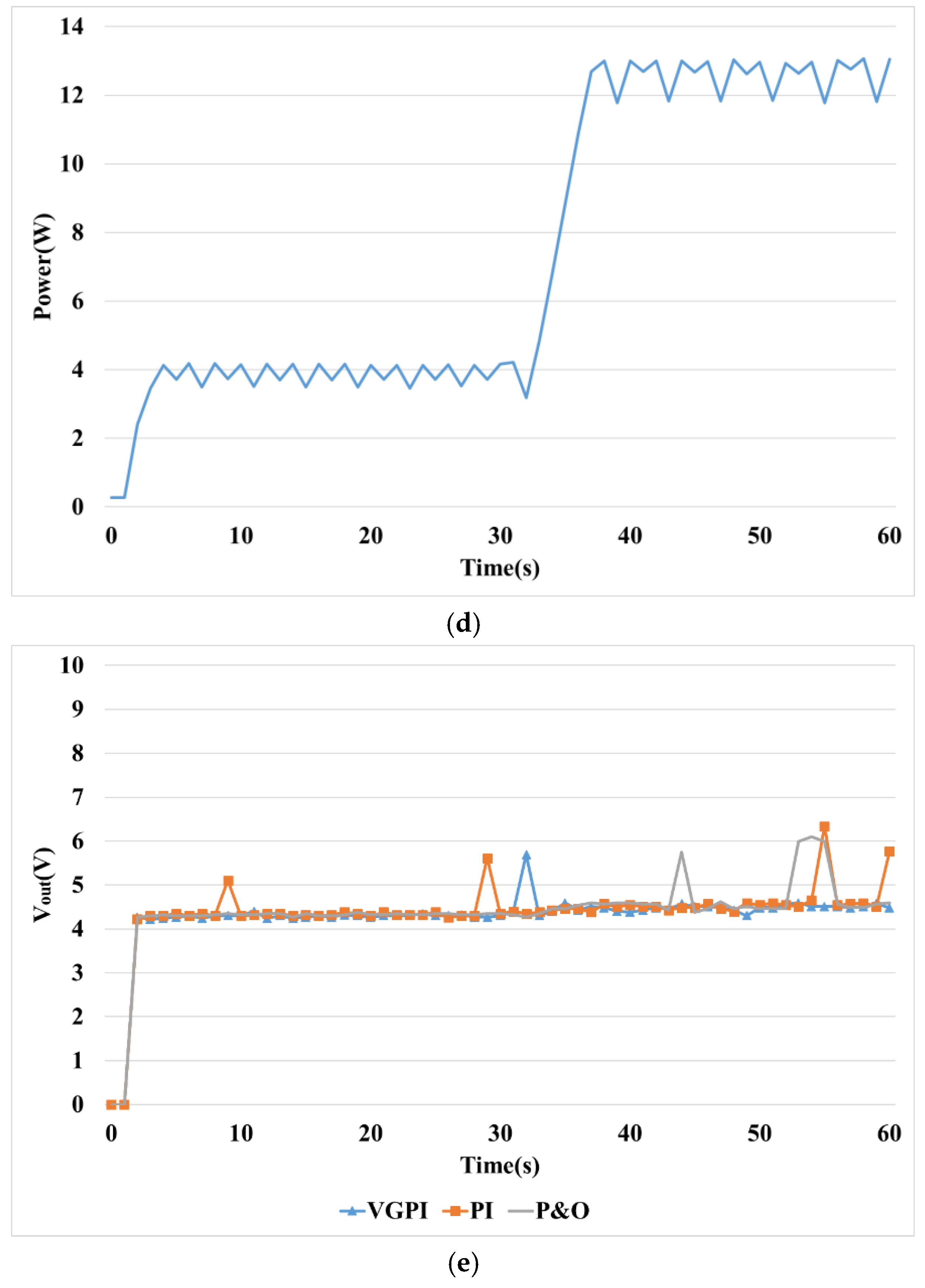
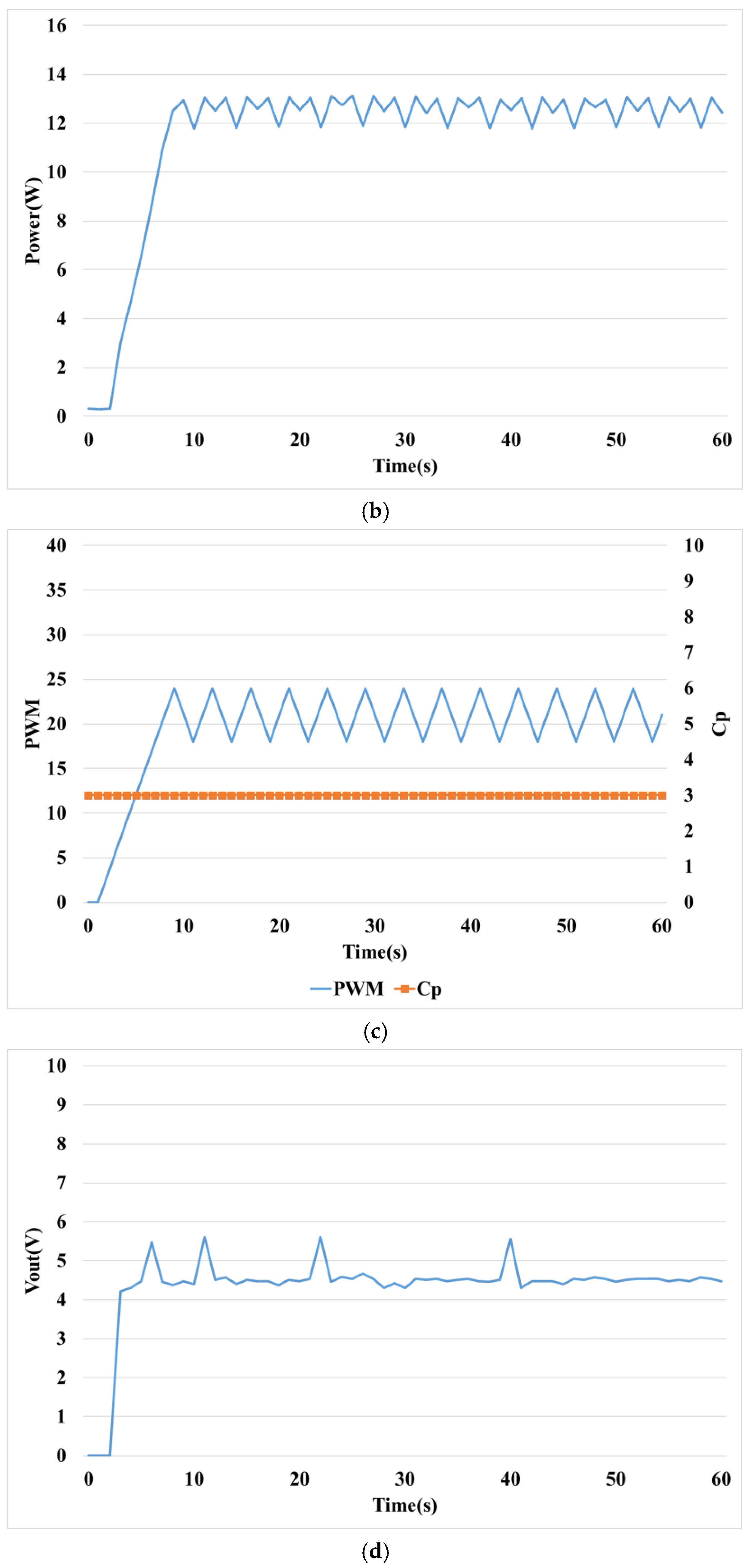
Figure 17 shows the response characteristics of the most commonly used P&O method for MPPT control. In particular,
Figure 17a shows the voltage and current,
Figure 17b presents the output power, and
Figure 17c shows the PWM signal and control value (
). Since the P&O method uses the fixed control value (
) in both transient state and steady state, voltage in
Figure 17a, power in
Figure 17b, and PWM signal in
Figure 17c have a constant ripple magnitude.
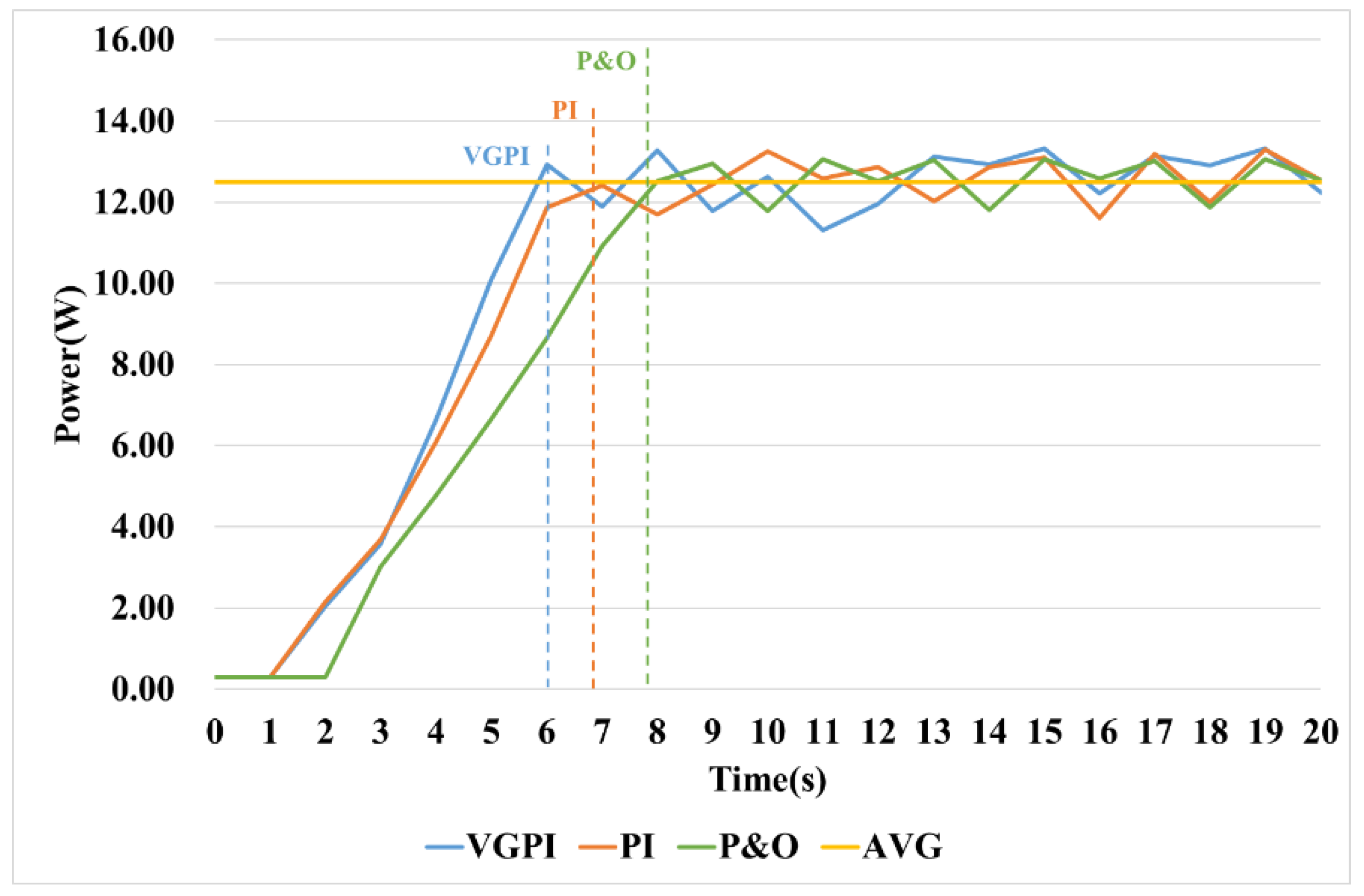
Figure 18 and
Table 6 show a comparison of the power response characteristics in transient states of the VGPI, PI, and P&O methods in
Figure 15,
Figure 16 and
Figure 17. The time to trace the maximum power point in transient state was measured as the time to reach the average power (12.5 [W]) of steady state, the results are shown in
Table 6. As the results in
Table 6 show, the VGPI controller has the most tracking speed with a high gain value in transient.
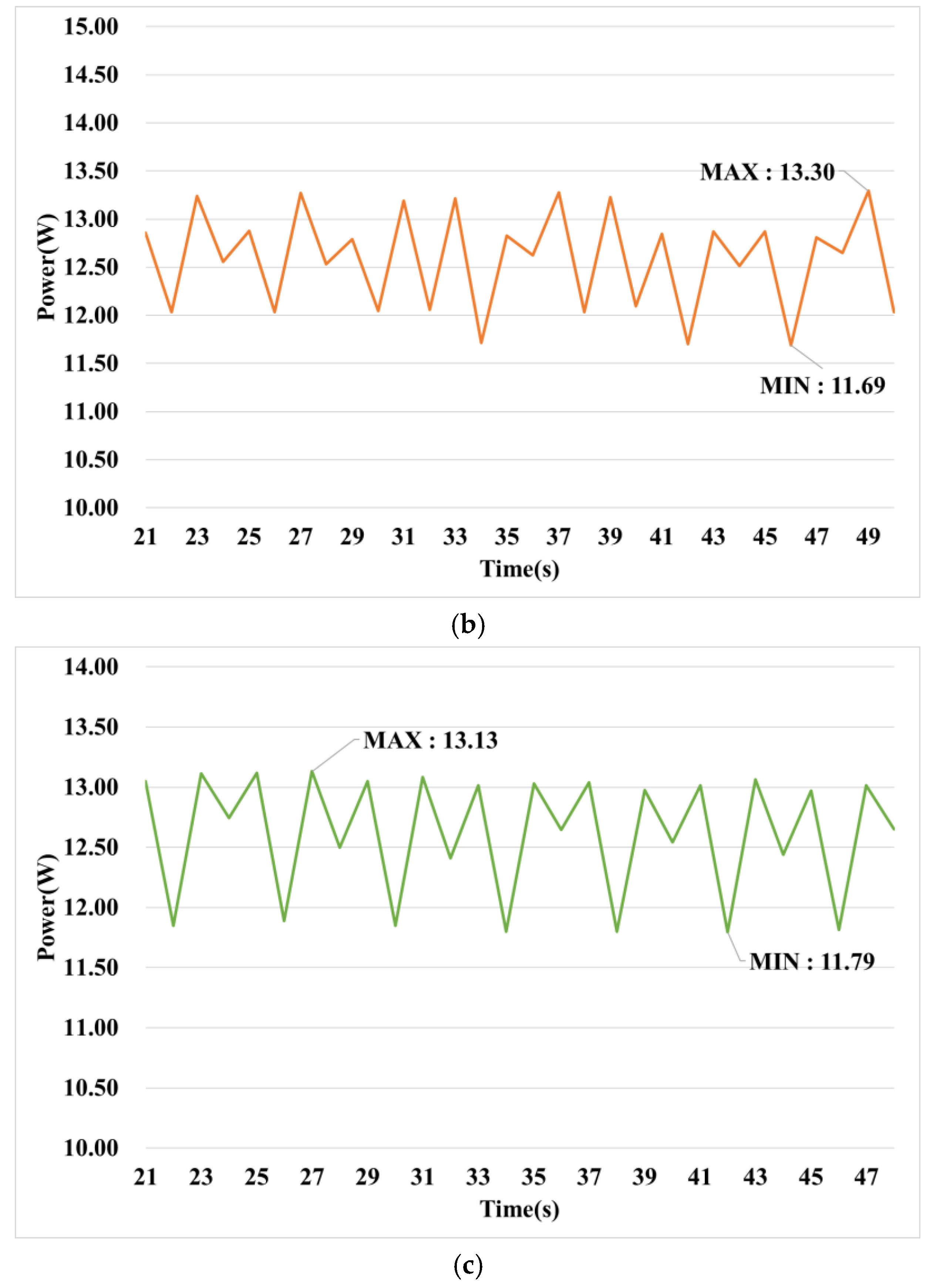
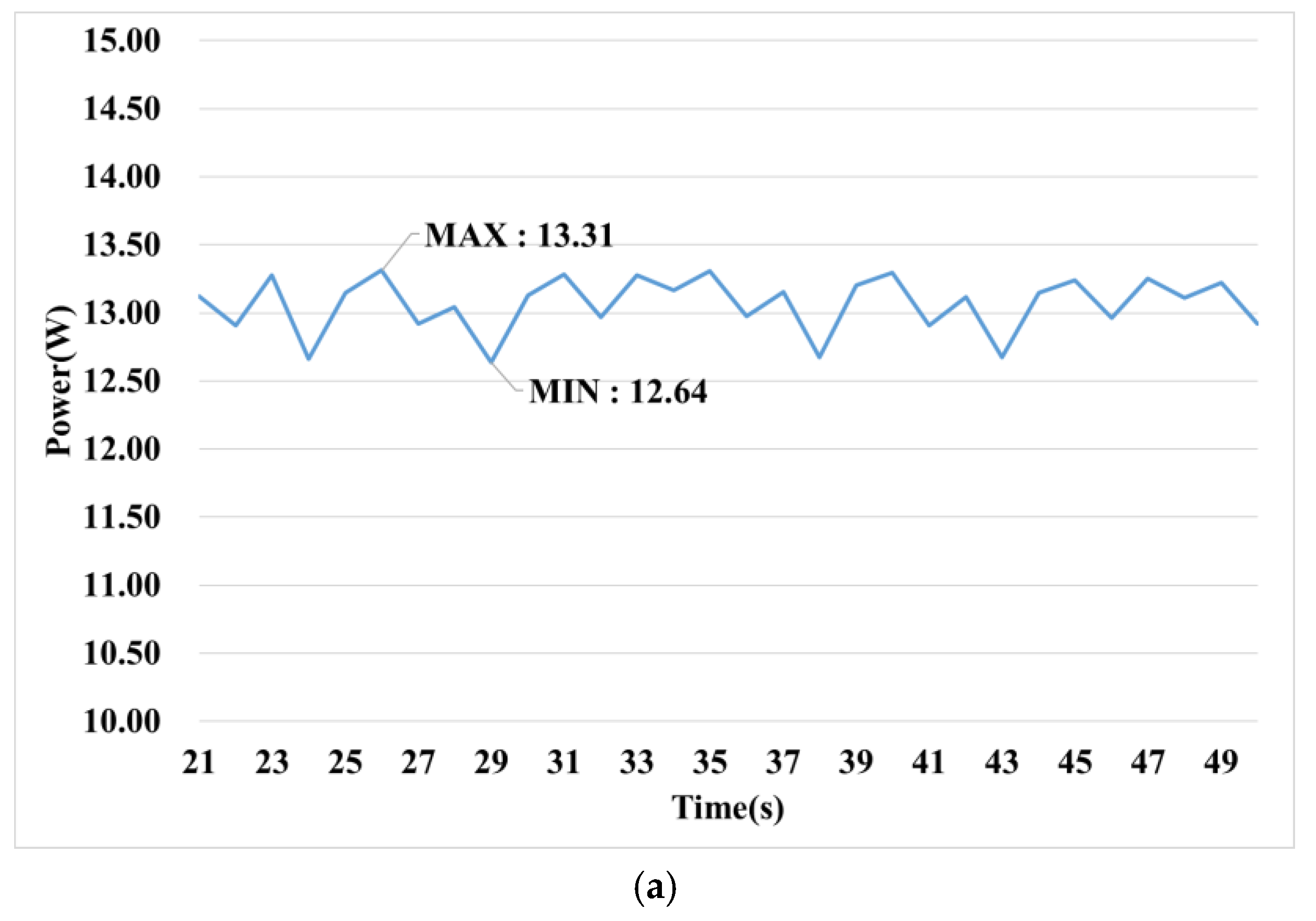
Figure 19 and
Table 7 represent the magnified picture and characteristics of the steady-state portion of
Figure 15,
Figure 16 and
Figure 17. The VGPI controller had the lowest error because it had lower gain values in a steady state, and the ripple was about 50% lower than the P&O method. Since the PI controller used a high gain value for fast tracking speed in transient conditions, steady-state error was rather higher than the P&O method.
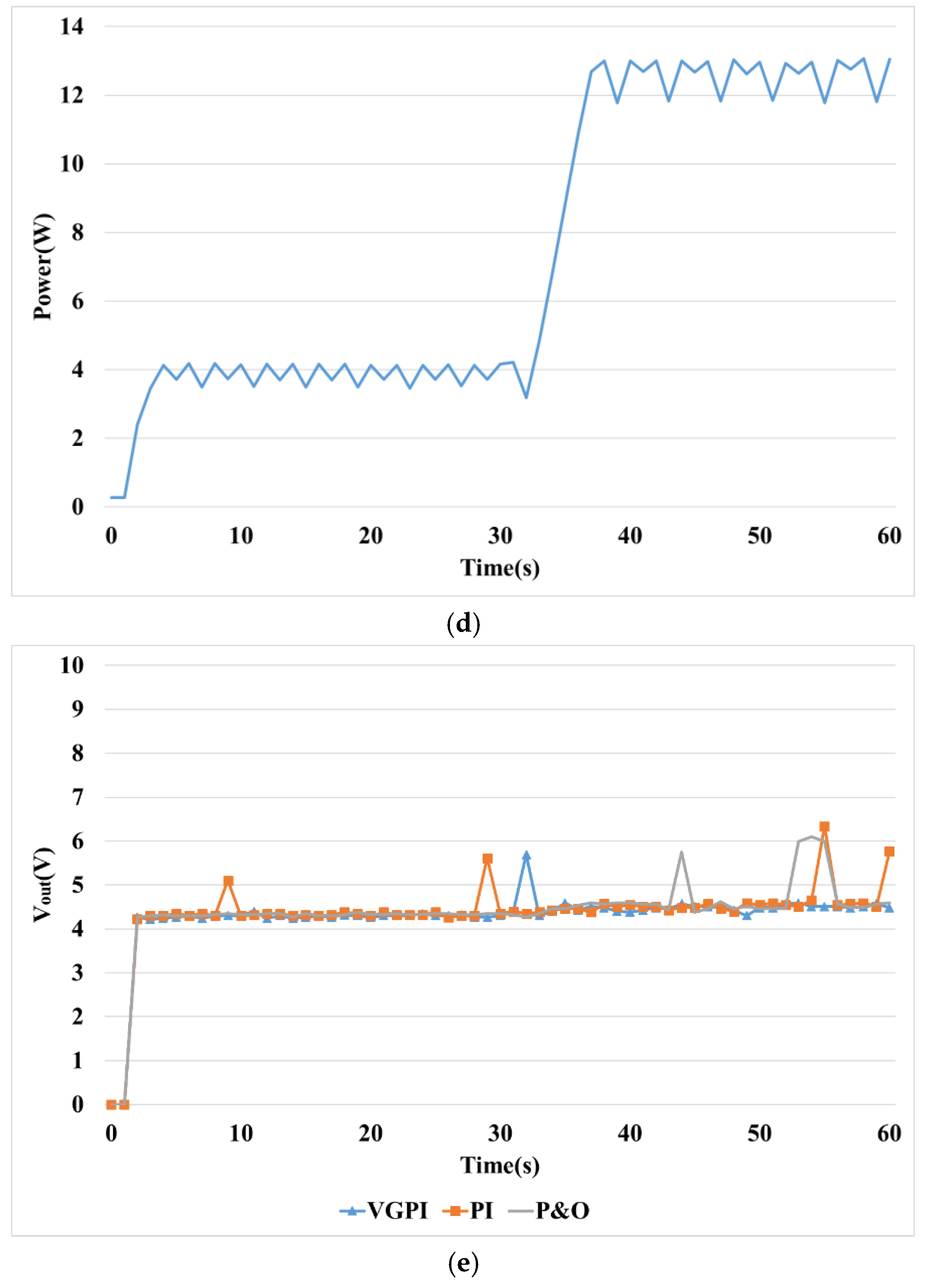
Figure 20 and
Table 8 show MPPT control characteristics for changing conditions of solar radiation.
Figure 20a represents the output of the VGPI, and
Figure 20b represents the change in the gain value of the VGPI controller. The gain value of the VGPI controller represents a characteristic that is increasing in a transient state and is decreasing in steady state.
Table 8 shows comparison of steady-state error for conditions with different solar irradiance. VGPI controllers show low steady-state error across all sections.
Figure 20d represents the output voltage of the VGPI, PI, and P&O methods, with constant voltage output for the changing conditions of the solar radiation.
5. Conclusions
This paper proposes a method for tracking the MPP of solar power generation. P&O and IncCond methods, which are commonly used MPPT methods, have limitations in performance improvement because they track a MPP by varying a voltage or a current with a constant magnitude.
In this paper, the VGPI controller is proposed to solve this problem. The characteristics of the VGPI controller presented in the paper are as follows.
Based on the PI controller, which is most commonly used in industrial sites.
The gain value of the PI controller adjusts according to the operating state using fuzzy control.
Design a fuzzy control membership function and rule base in accordance with the basic operation of the PV module.
The membership function of the fuzzy control output consists of three types: increase (P: Positive), hold (ZE: zero) and decrease (N: negative).
The gain value of the PI controller is increased for a quick response in transient conditions and reduced to reduce steady-state error in normal conditions. The VGPI proposed in this paper compares the tracking time at transient-state and the error in steady state with conventional MPPT methods for two scenarios (constant and changing conditions of solar radiation).
Under constant or varying conditions, the proportional gain () and integral gain () of the VGPI controller increased to the maximum value in the transient state and decreased to the minimum value in the steady state by the fuzzy control, and were continuously adjusted.
As a result, the VGPI controller proposed in this paper is about 14% better than the conventional PI and P&O in tracking speed, and the error in steady-state shown respectively 36.5% and 40% lower than PI and P&O. Even in conditions with varying solar radiation, the VGPI controller had excellent MPPT performance than other controllers because of continuous gain adjustment. VGPI controllers are able to adjust continuous gain values according to changing environments, and both transient and steady-state response performance was improved.
This method is expected to be applicable to various variable systems, as well as MPPT for solar power. Fuzzy control used in this paper requires continuous calculation according to changing environmental conditions. In addition, the calculation of fuzzy control depends on the membership function and rule base, and the calculation amount can be greatly increased according to the environmental change conditions. This phenomenon degrades the MPPT performance.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}