An RP-MCE-SOP Framework for China’s County-Level “Three-Space” and “Three-Line” Planning—An Integration of Rational Planning, Multi-Criteria Evaluation, and Spatial Optimization



Abstract
:1. Introduction
2. Rational Planning, Multi-Criteria Evaluation, and Spatial Optimization
2.1. Rational Planning Model
2.2. Multi-Criteria Evaluation (MCE)
2.3. Spatial Optimization (SOP)
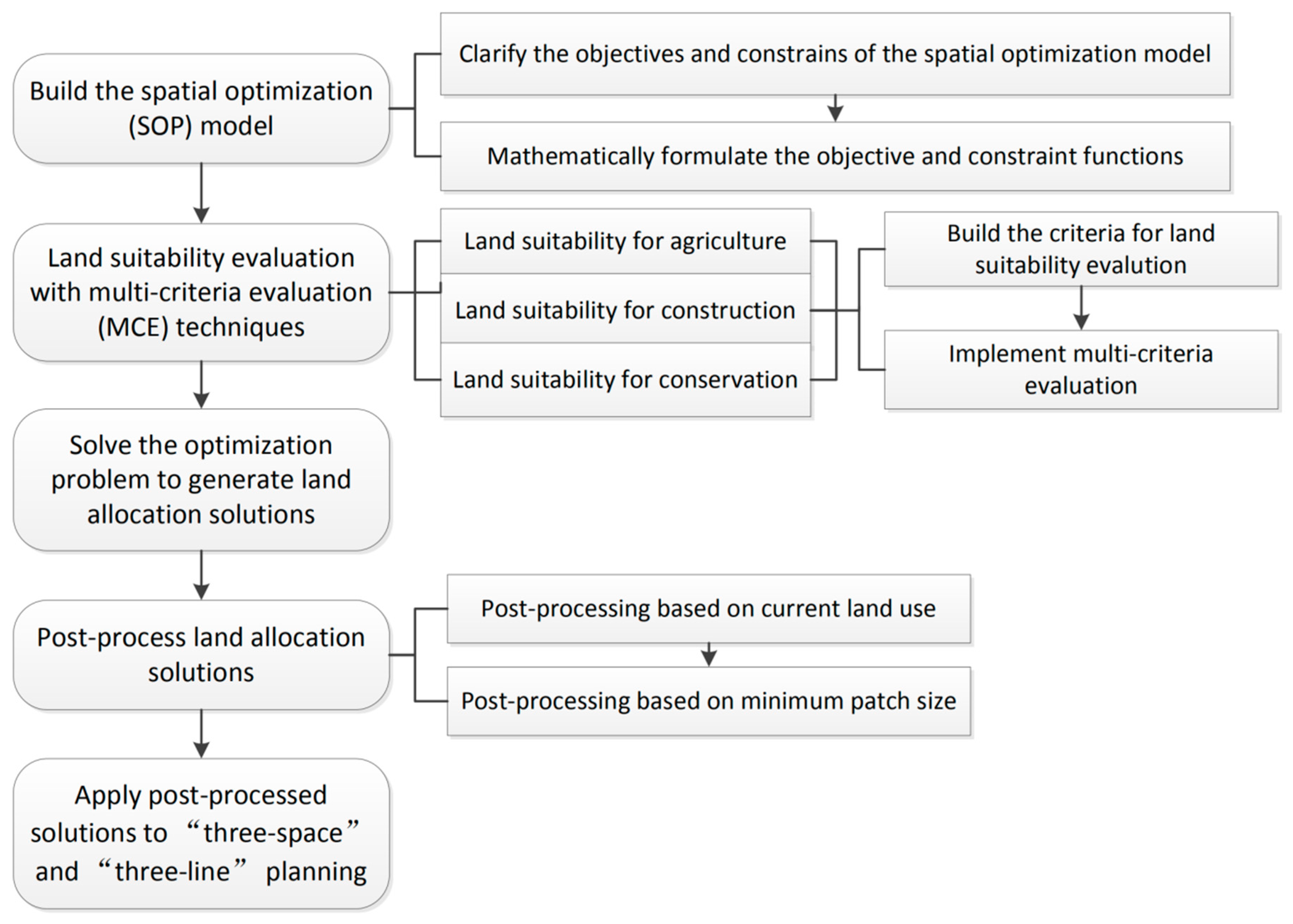
3. The RP-MCE-SOP Framework
4. Case Study
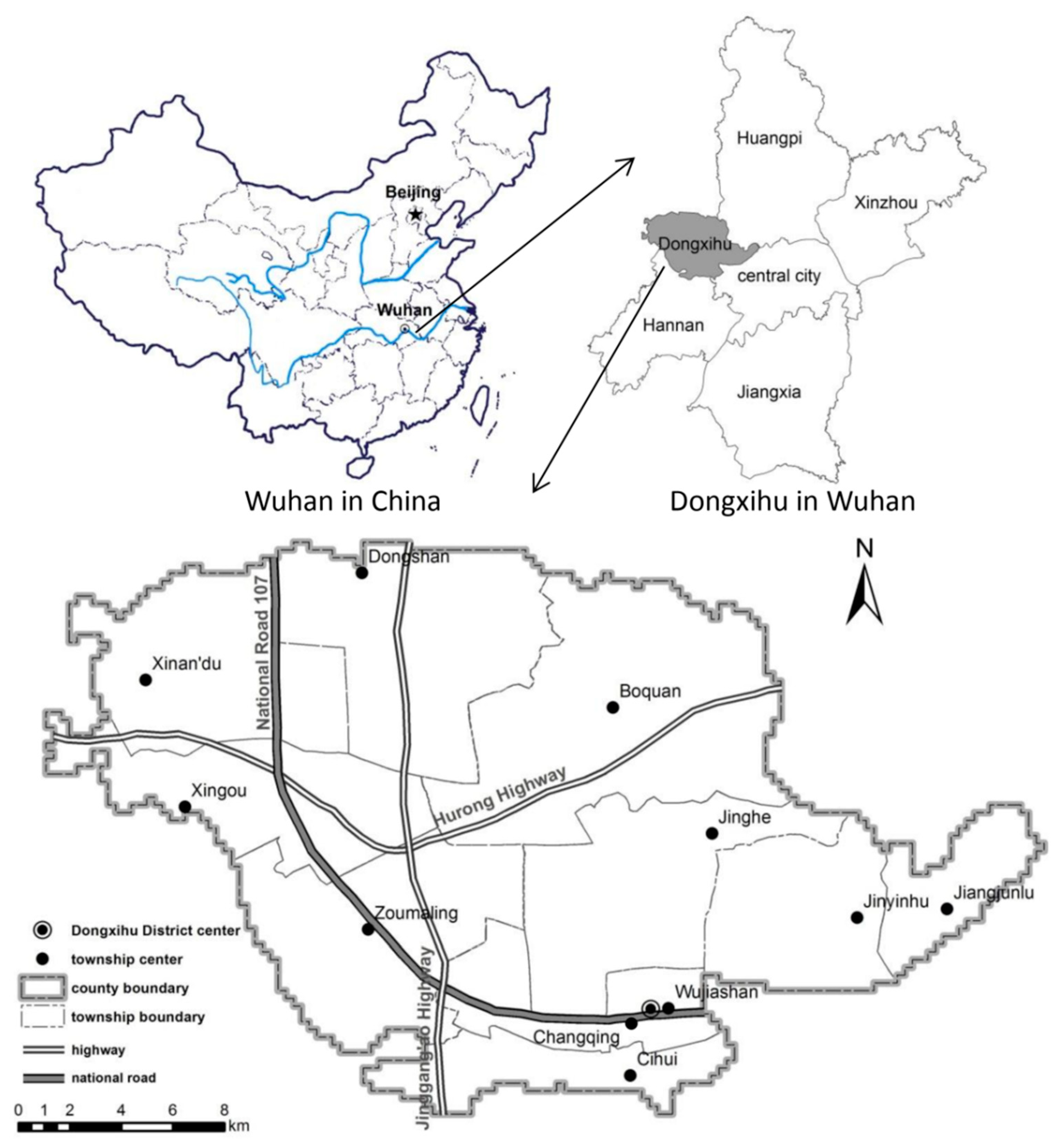
4.1. Study Area and Data
4.2. Implementation of the RP-MCE-SOP Framework in Dongxihu District of Wuhan City
4.2.1. Building the Spatial Optimization Model
4.2.2. Land Suitability Evaluation with Multi-Criteria Evaluation
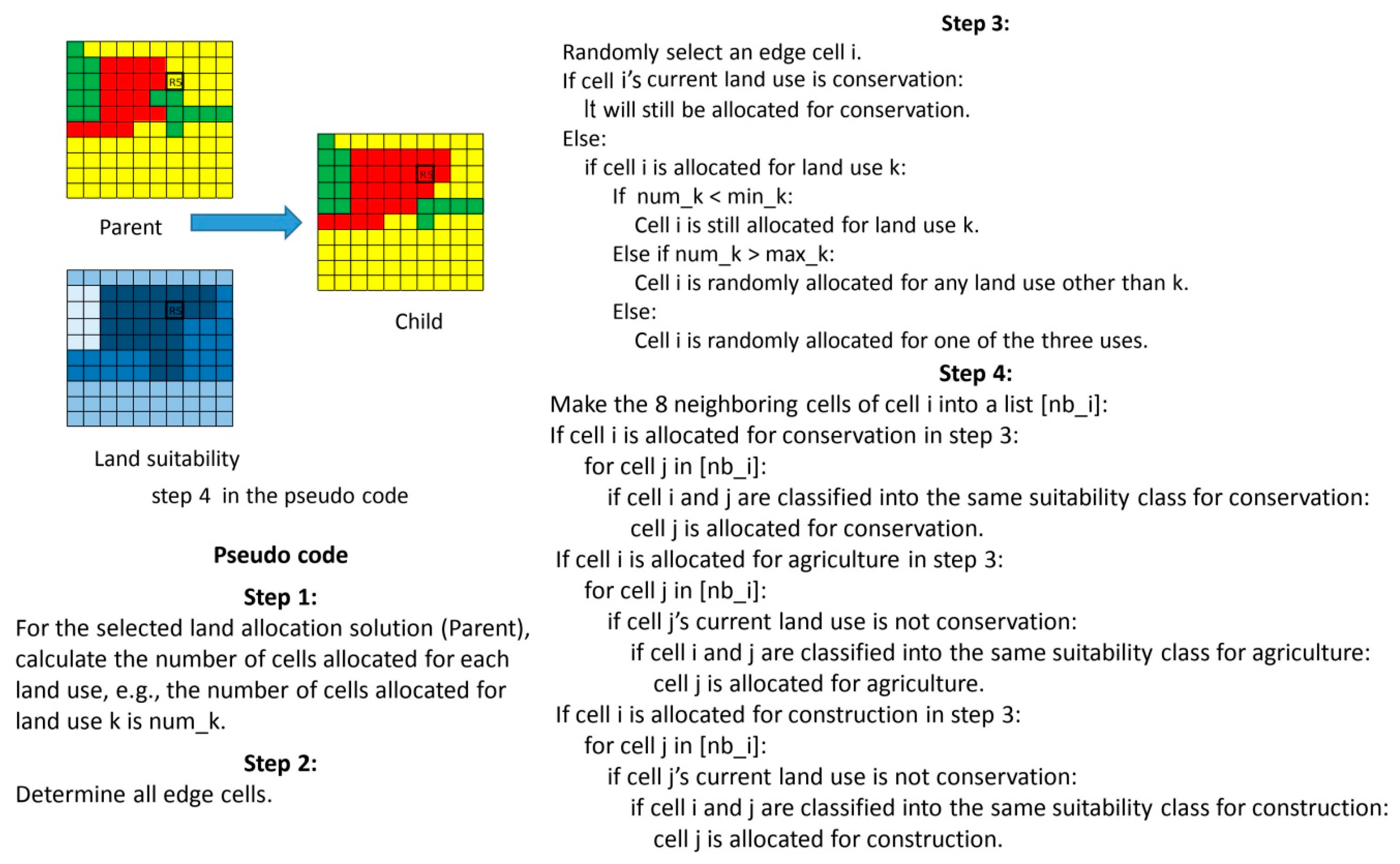
4.2.3. Spatial Optimization Problem Solving
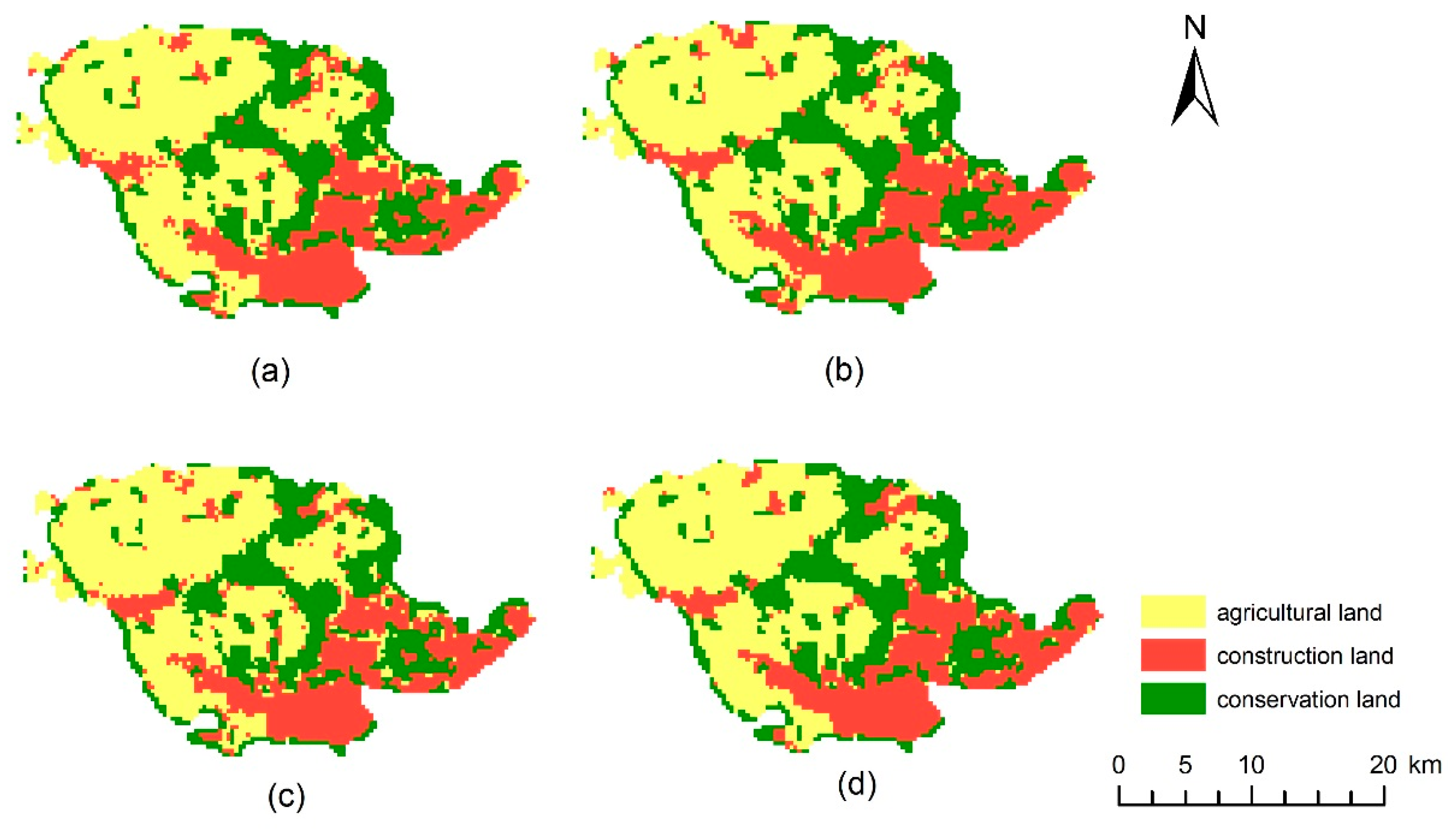
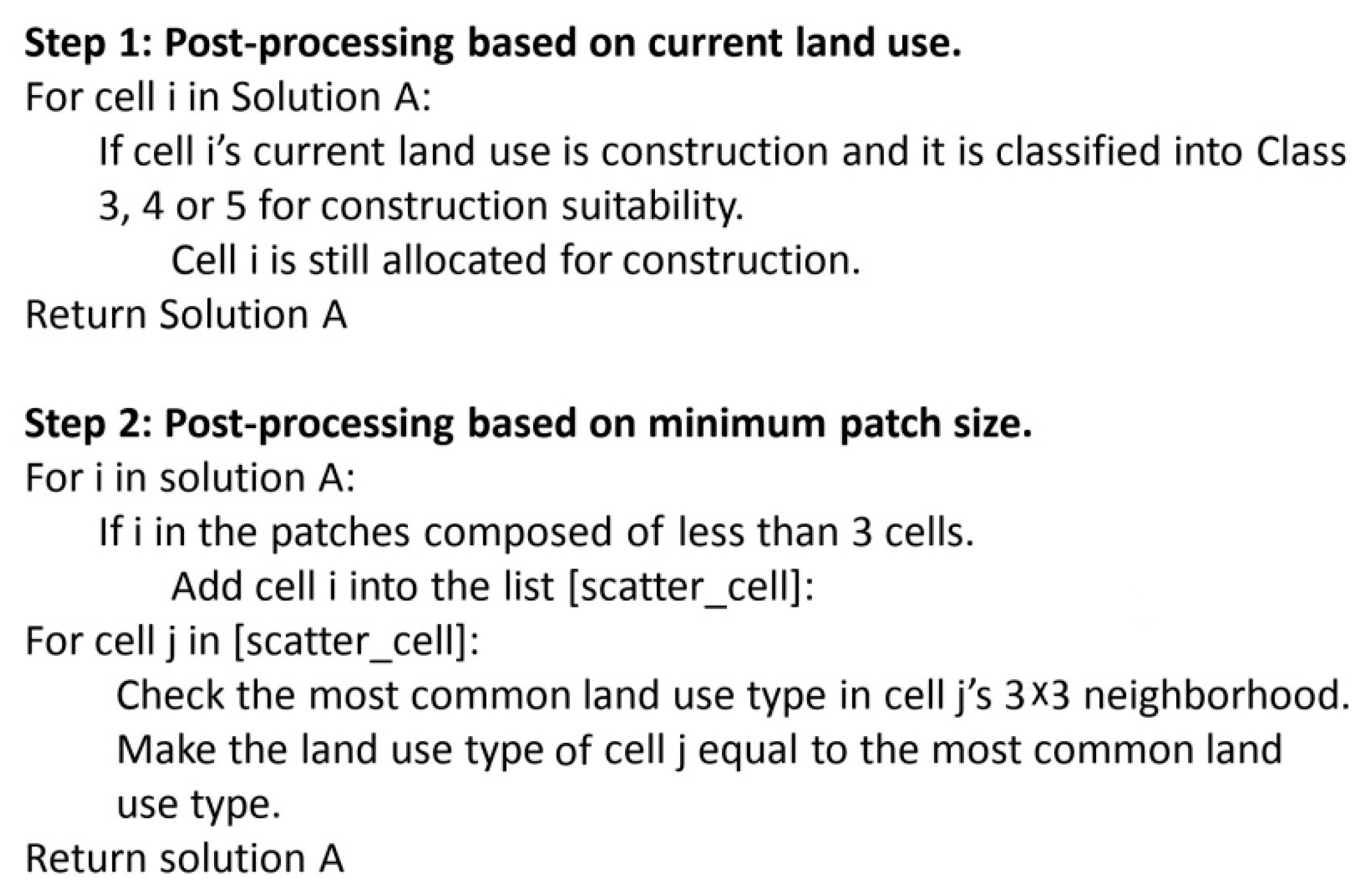
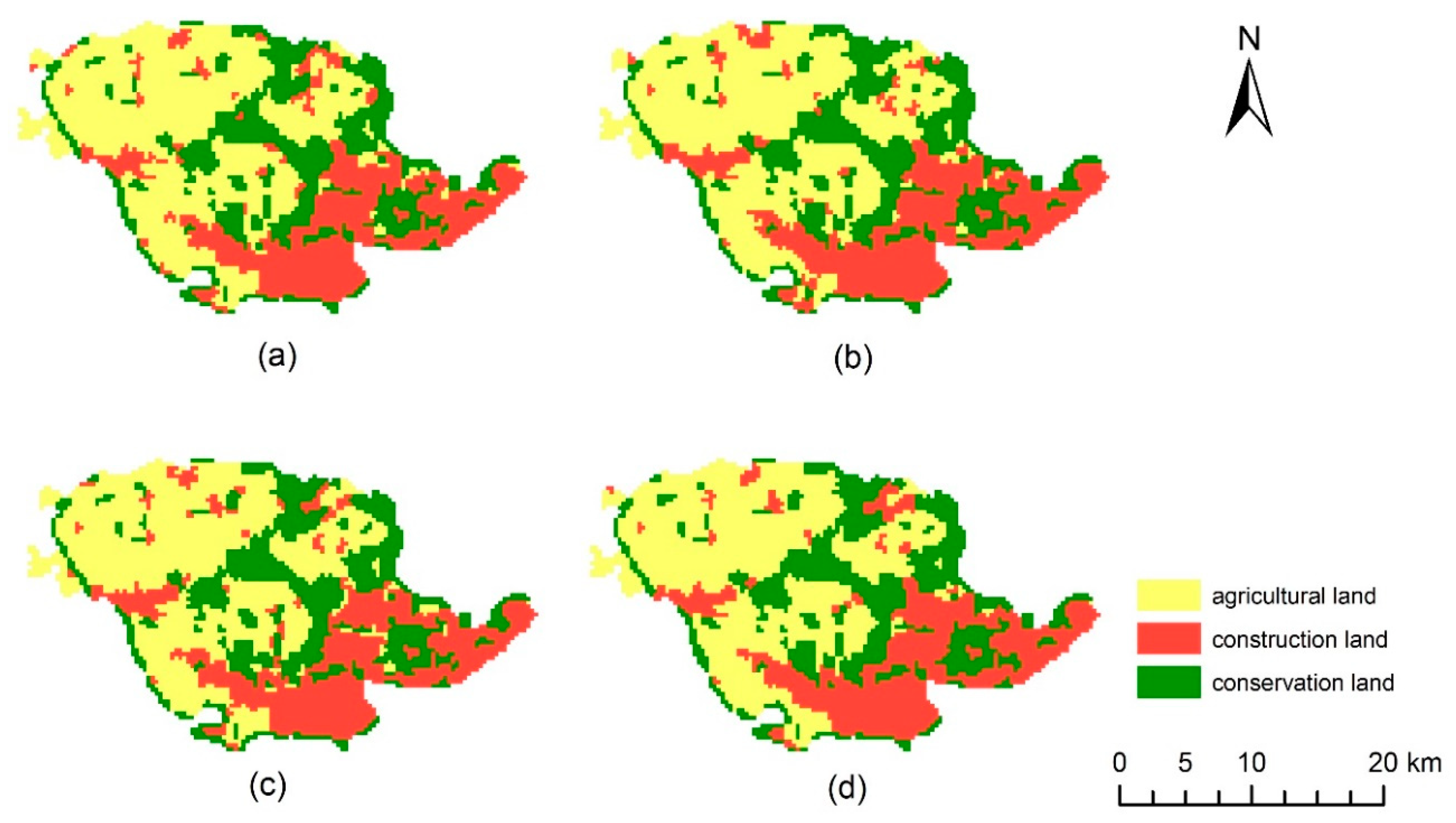
4.2.4. Post-Processing of Land Allocation Solutions
4.2.5. Apply Post-Processed Solutions to “Three-Space” and “Three-Line” Planning
5. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liu, Y.; Wang, J. Theoretical analysis and technical methods of “multiple planning integration” in the rural to urban transition period in China. Prog. Geogr. 2016, 35, 529–536. (In Chinese) [Google Scholar]
- Xie, Y.; Wang, W. From “Multi-plan Coordination” to the Reform of the Spatial Planning System. Urban Plan. Forum 2015, 3, 15–22. (In Chinese) [Google Scholar]
- Zhang, Y.; Feng, G. Study on the Mechanism of “Multiple Plans Conflicts” and “Multiple Plans Integration” based on the Spatialtemporal Cone Theory. China Land Sci. 2017, 31, 4–11. (In Chinese) [Google Scholar]
- Huang, Z.; Wang, J. Proposal for coordinating and carrying forward the pilot project of “Multiple Planning Integration” in cities and counties. Land Resour. Inf. 2017, 5, 24–30. (In Chinese) [Google Scholar]
- The State Council of the People’s Republic of China. National Spatial Planning Guideline. 3 January 2017. Available online: http://landchina.mlr.gov.cn/tdgh1/201702/t20170205_6818302.htm (accessed on 3 January 2017).
- The State Council of the People’s Republic of China. Pilot Provincial Spatial Planning Guideline. Available online: http://www.rmlt.com.cn/2017/0110/455843.shtml (accessed on 27 December 2016).
- Coffman, M.; Umemoto, K. The triple-bottom-line: Framing of trade-offs in sustainability planning practice. Environ. Dev. Sustain. 2010, 12, 597–610. [Google Scholar] [CrossRef]
- Hacking, T.; Guthrie, P. A framework for clarifying the meaning of Triple Bottom-Line, Integrated, and Sustainability Assessment. Environ. Impact Assess. Rev. 2008, 28, 73–89. [Google Scholar] [CrossRef]
- Halpern, B.S.; Klein, C.J.; Brown, C.J.; Beger, M.; Grantham, H.S.; Mangubhai, S.; Ruckelshaus, M.; Tulloch, V.J.; Watts, M.; White, C.; et al. Achieving the triple bottom line in the face of inherent trade-offs among social equity, economic return, and conservation. Proc. Natl. Acad. Sci. USA 2013, 110, 6229–6234. [Google Scholar] [CrossRef] [Green Version]
- Wise, N. Outlining triple bottom line contexts in urban tourism regeneration. Cities 2016, 53, 30–34. [Google Scholar] [CrossRef]
- Bai, S. Exploration and Reflection on Spatial Management of Land Use Based on “Three-space” and “Three-line” Planning. Resour. Guide 2018, 2, 18–19. (In Chinese) [Google Scholar]
- Zhang, J.; Gao, Y.; Cai, Y.; Zhou, W.; Yuan, T. Spatial optimization on the municipal level based on “multiple planning integration”: A case study of Yantai City. Prog. Geogr. 2018, 37, 1045–1054. (In Chinese) [Google Scholar]
- Huang, Z.; Teng, F.; Wang, L. Suggestions on Further Promoting the Provincial Land Space Planning Pilot-Take Ningxia Land Space Planning Pilot as an Example. Natl. Resour. Econ. China 2019, 1, 20–24. (In Chinese) [Google Scholar]
- Zhu, D. Exploration on Spatial Planning System of Counties Domain with Multi-Planning United: A Case Study on Four-Plan—Coordination Practices in Dali. Modern Urban Res. 2016, 8, 38–46. (In Chinese) [Google Scholar]
- Li, X.; Ma, S. Software for intelligent identification of the “Three-space” and “Three-line”: Geographical Simulation and Optimization Systems. China Land. 2018, 3, 24–27. (In Chinese) [Google Scholar]
- The Planning Institution of China Center for Urban Development (PICCUD). Planning and spatial management strategy of “Three-space” and “Three-line.” 2018. Available online: http://www.ccud.org.cn/index.html (accessed on 4 June 2018).
- Li, T.; Liu, K. Research on Spatial Planning System Reform in Our Country: In the Case of the County’s Overall Planning. Urban Dev. Stud. 2016, 23, 16–22. (In Chinese) [Google Scholar]
- Lin, J.; Qiao, Y.; Wu, Z. Analysis of the “One Blueprint” of the “Multiple Plans Integration”: A Case Study of Huantai County, Shandong Province. Urban Dev. Stud. 2017, 24, 47–52. (In Chinese) [Google Scholar]
- Kaiser, E.J.; Godschalk, D.R.; Chapin, F.S. Urban Land Use Planning, 4th ed.; University of Illinois Press: Urbana, IL, USA, 1995. [Google Scholar]
- Food and Agriculture Organization of the United Nations. Guidelines for Land-Use Planning; Food and Agriculture Organization of the United Nations: Rome, Italy, 1993. [Google Scholar]
- Malczewski, J. GIS-based land-use suitability analysis: A critical overview. Prog. Plan. 2004, 62, 3–65. [Google Scholar] [CrossRef]
- Mosadeghi, R.; Warnken, J.; Tomlinson, R.; Mirfenderesk, H. Comparison of Fuzzy-AHP and AHP in a spatial multi-criteria decision making model for urban land-use planning. Comput. Environ. Urban Syst. 2015, 49, 54–65. [Google Scholar] [CrossRef] [Green Version]
- Saaty, T.L. Decision making with the analytic hierarchy process. Int. J. Serv. Sci. 2008, 1, 83–98. [Google Scholar] [CrossRef]
- Joerin, F. Using GIS and outranking multicriteria analysis for land-use. Int. J. Geogr. Inf. Sci. 2001, 15, 153–174. [Google Scholar] [CrossRef]
- Santé-Riveira, I.; Boullón-Magán, M.; Crecente-Maseda, R.; Miranda-Barrós, D. Algorithm based on simulated annealing for land-use allocation. Comput. Geosci. 2008, 34, 259–268. [Google Scholar] [CrossRef]
- Zhou, J.; Civco, D.L. Using Genetic Learning Neural Networks for Spatial Decision Making in GIS. Photogramm. Eng. Remote Sens. 1996, 62, 1287–1295. [Google Scholar]
- Aerts, J.; Heuvelink, G. Using simulated annealing for resource allocation. Int. J. Geogr. Inf. Sci. 2002, 16, 571–587. [Google Scholar] [CrossRef] [Green Version]
- Datta, D.; Deb, K.; Fonseca, C.M.; Lobo, F.G.; Condado, P.A.; Seixas, J. Multi-Objective Evolutionary Algorithm for Land-Use Management Problem. Int. J. Comput. Intell. Res. 2007, 3, 371–384. [Google Scholar]
- Duh, J.D.; Brown, D.G. Knowledge-informed Pareto simulated annealing for multi-objective spatial allocation. Comput. Environ. Urban Syst. 2007, 31, 253–281. [Google Scholar] [CrossRef]
- Murray, A.T.; Church, R.L. Heuristic solution approaches to operational forest planning problems. Oper. Res. Spektrum 1995, 17, 193–203. [Google Scholar] [CrossRef]
- Önal, H.; Briers, R.A. Designing a conservation reserve network with minimal fragmentation: A linear integer programming approach. Environ. Model. Assess. 2005, 10, 193–202. [Google Scholar] [CrossRef]
- Sahebgharani, A. Multi-objective land use optimization through parallel particle swarm algorithm: Case study Baboldasht district of Isfahan, Iran. J. Urban Environ. Eng. 2016, 10, 42–49. [Google Scholar] [CrossRef]
- Wu, X.; Murray, A.T.; Xiao, N. A multiobjective evolutionary algorithm for optimizing spatial contiguity in reserve network design. Landsc. Ecol. 2011, 26, 425–437. [Google Scholar] [CrossRef]
- Cao, K.; Huang, B.; Wang, S.; Lin, H. Sustainable land use optimization using Boundary-based Fast Genetic Algorithm. Comput. Environ. Urban Syst. 2012, 36, 257–269. [Google Scholar] [CrossRef]
- Liu, Y.; Peng, J.; Jiao, L.; Liu, Y. PSOLA: A heuristic land-use allocation model using patch-level operations and knowledge-informed rules. PLoS ONE 2016, 11, e0157728. [Google Scholar] [CrossRef]
- Masoomi, Z.; Mesgari, M.S.; Hamrah, M. Allocation of urban land uses by Multi-Objective Particle Swarm Optimization algorithm. Int. J. Geogr. Inf. Sci. 2013, 27, 542–566. [Google Scholar] [CrossRef]
- Liu, X.; Li, X.; Shi, X.; Huang, K.; Liu, Y. A multi-type ant colony optimization (MACO) method for optimal land use allocation in large areas. Int. J. Geogr. Inf. Sci. 2012, 26, 1325–1343. [Google Scholar] [CrossRef]
- Ministry of Land and Resources of the PRC. Guideline for the County-Level General Land Use Planning (TD/T 1024-2010); Ministry of Land and Resources of the PRC: Beijing, China, 2010.
- Wuhan Land Resources and Planning Bureau. Comprehensive Land Use Planning of Wuhan (2006–2020); Wuhan Land Resources and Planning Bureau: Wuhan, China, 2008.
- Wuhan Land Resources and Planning Bureau. Outline for Comprehensive Land Use Planning in Dongxihu District, Wuhan (2006–2020); Wuhan Land Resources and Planning Bureau: Wuhan, China, 2009.
- Wuhan Land Resources and Planning Bureau. Urban Comprehensive Planning of Wuhan (2010–2020); Wuhan Land Resources and Planning Bureau: Wuhan, China, 2010.
- De la Rosa, D.; Mayol, F.; Diaz-Pereira, E.; Fernandez, M.; de la Rosa, D. A land evaluation decision support system (MicroLEIS DSS) for agricultural soil protection. Environ. Model. Softw. 2004, 19, 929–942. [Google Scholar] [CrossRef]
- Ke, X.; Rong, G.; Han, B. Suitable Evaluation on Cultivated Land based on AHP and GIS in Hubei Province. Territ. Natl. Resour. Study 2011, 4, 35–38. (In Chinese) [Google Scholar]
- Office of National Soil Survey. Soils of China; China Agriculture Press: Beijing, China, 1998. [Google Scholar]
- USDA; SCS. National Agricultural Land Evaluation and Site Assessment Handbook; GPO: Washington, DC, USA, 1983.
- Zhao, H.; Zhang, F. Suitability Evaluation of Crop Land in Beijing by Means of Grid Data Integration. Chin. J. Soil Sci. 2013, 44, 1281–1286. (In Chinese) [Google Scholar]
- He, D.; Jin, F.; Zhou, J. Urban construction land suitability evaluation in resource-based cities: Taking the Grand Canal Ecologic and Economic Area as an example. Geogr. Res. 2011, 30, 655–666. (In Chinese) [Google Scholar]
- Li, C.; Xing, L.; Li, Y.; Feng, D. Land Development Suitability Evaluation Indicator System Study Based on ArcGIS. China Popul. Resour. Environ. 2014, 24, 175–178. (In Chinese) [Google Scholar]
- Ni, S.; Liu, Y. Suitability evaluation and sorted readjustment of rural residential areas. Territ. Natl. Resour. Study 2015, 3, 40–44. (In Chinese) [Google Scholar]
- Qi, Y.W.; Gu, C.L. Study on the methods and their application for the urban development spatial division: A case of Nanjing. Geogr. Res. 2010, 29, 2035–2044. (In Chinese) [Google Scholar]
- Shuang, W.; Hao, J.; Ai, D.; Huang, X.; Wang, Y.; Chuanmin, Z.; Chen, L. Suitability Evaluation, Subarea Control and Regulation of Rural Residential Land Based on AVC Theory. Soils 2014, 46, 126–133. (In Chinese) [Google Scholar]
- Zhang, X.; Fang, C.; Wang, Z.; Ma, H. Urban construction land suitability evaluation based on improved multi-criteria evaluation based on GIS (MCE-GIS): Case of New Hefei City, China. Chin. Geogr. Sci. 2013, 23, 740–753. (In Chinese) [Google Scholar] [CrossRef] [Green Version]
- Cui, Q.Y. Study on the Designating Scope of City Basic Ecological Control Line. J. EMCC 2012, 22, 23–26. (In Chinese) [Google Scholar]
- Ministry of Environmental Protection of the PRC. Technical Guideline for Delineating Source Water Protection Areas (HJ/T338-2007); Ministry of Environmental Protection of the PRC: Beijing, China, 2007.
- Ministry of Land and Resources of the PRC; Ministry of Water Resources of the PRC. National Land Subsidence Control Planning 2011–2020; Ministry of Land and Resources of the PRC; Ministry of Water Resources of the PRC: Beijing, China, 2012.
- Wang, G.; Wang, W.; Zhou, H. The Planning of Urban Fundamental Ecological Controlling Area: The Case of Guangzhou. Urban Plan. Forum 2014, 2, 73–79. (In Chinese) [Google Scholar]
- Wuhan Land Resources and Planning Bureau. Basic Ecological Control Line Planning of Wuhan (1:2000); Wuhan Land Resources and Planning Bureau: Wuhan, China, 2012.
- Jenks, G.F.; Caspall, F.C. Error on choroplethic maps: Definition, measurement, reduction. Ann. Assoc. Am. Geogr. 1971, 61, 217–244. [Google Scholar] [CrossRef]
- Song, M. A Framework with Improved Spatial Optimization Algorithms to Support China’s “Multi-Plan Integration” at the County Level; Queen’s University: Kingston, ON, Canada, 2018. [Google Scholar]
- Deb, K.; Pratab, S.; Agarwal, S.; Meyarivan, T. A Fast and Elitist Multiobjective Genetic Algorithm: NGSA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Song, M.; Chen, D. An improved knowledge-informed NSGA-II for multi-objective land allocation (MOLA). Geo-Spat. Inf. Sci. 2018, in press. [Google Scholar] [CrossRef]
- Cheng, Y.; Liu, K.; Zhao, D.; Cheng, D. The Discussion of Questions Regarding Delimitation of Urban Development Boundary based on Multiple Plans Integration. Urban Dev. Stud. 2015, 22, 52–57. (In Chinese) [Google Scholar]
- Zhu, M.; Huang, H.; Shi, W.; Yan, B.; Wang, Z.; Liu, Y.; Zhang, Y. The Research of Prime Farmland Demarcation Based on Multi-planning-in-one: A Case Study of Yujiang County, Jiangxi Province. J. Nat. Resour. 2016, 31, 2111–2120. (In Chinese) [Google Scholar]
- Lin, J.; Qiao, Z.; Ye, Z. “Delimitation” and “Implementation” of Urban Growth Boundary: Analysis and Thoughts on the Practice in 14 Pilot Cities in China. Urban Plan. Forum 2017, 2, 37–43. (In Chinese) [Google Scholar]
- Zhao, Z.; Gong, R.; Zhang, J. A Comparative Study of China’s Urban Development Boundary Delimitation. Planners 2017, 33, 105–111. (In Chinese) [Google Scholar]
- Long, Y.; Han, H.; Lai, S.K.; Mao, Q. Urban growth boundaries of the Beijing Metropolitan Area: Comparison of simulation and artwork. Cities 2013, 31, 337–348. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Multi-Criteria Evaluation (MCE) Methods | Main Characteristics | References |
|---|---|---|
| Boolean evaluation | Each criterion is evaluated with binary values; multiple criteria are combined with AND/OR operation. | [21] |
| Weighted linear combination (WLC) | Each criterion is evaluated with continuous values; multiple criteria are combined by multiplying each criterion with a user-supplied weight. | [21] |
| Analytical hierarchy analysis (AHP) | The MCE problem is interpreted with a hierarchical structure; each criterion is assessed with its lower-level criteria; multiple criteria are pairwise compared to derive the priority scales based on expert’s knowledge. | [22,23] |
| Outranking methods (OM) | OMs build a series of pair-wise comparisons, analyze the degree to which one alternative outranks the other on the specified criteria. | [24] |
| Ideal point analysis (IPA) | IPA estimates the suitability level of a land unit for a single land use type based on its distance (deviation) from the ideal point. | [25] |
| Artificial neural networks (ANN) | ANNs simulate the way that the human brain works; it provides a mechanism of learning by examples and adapts to new conditions not necessarily based on a priori knowledge. | [26] |
| Data | Source |
|---|---|
| Statistical data | Dongxihu Almanac (2010) |
| Physical geographical data: | |
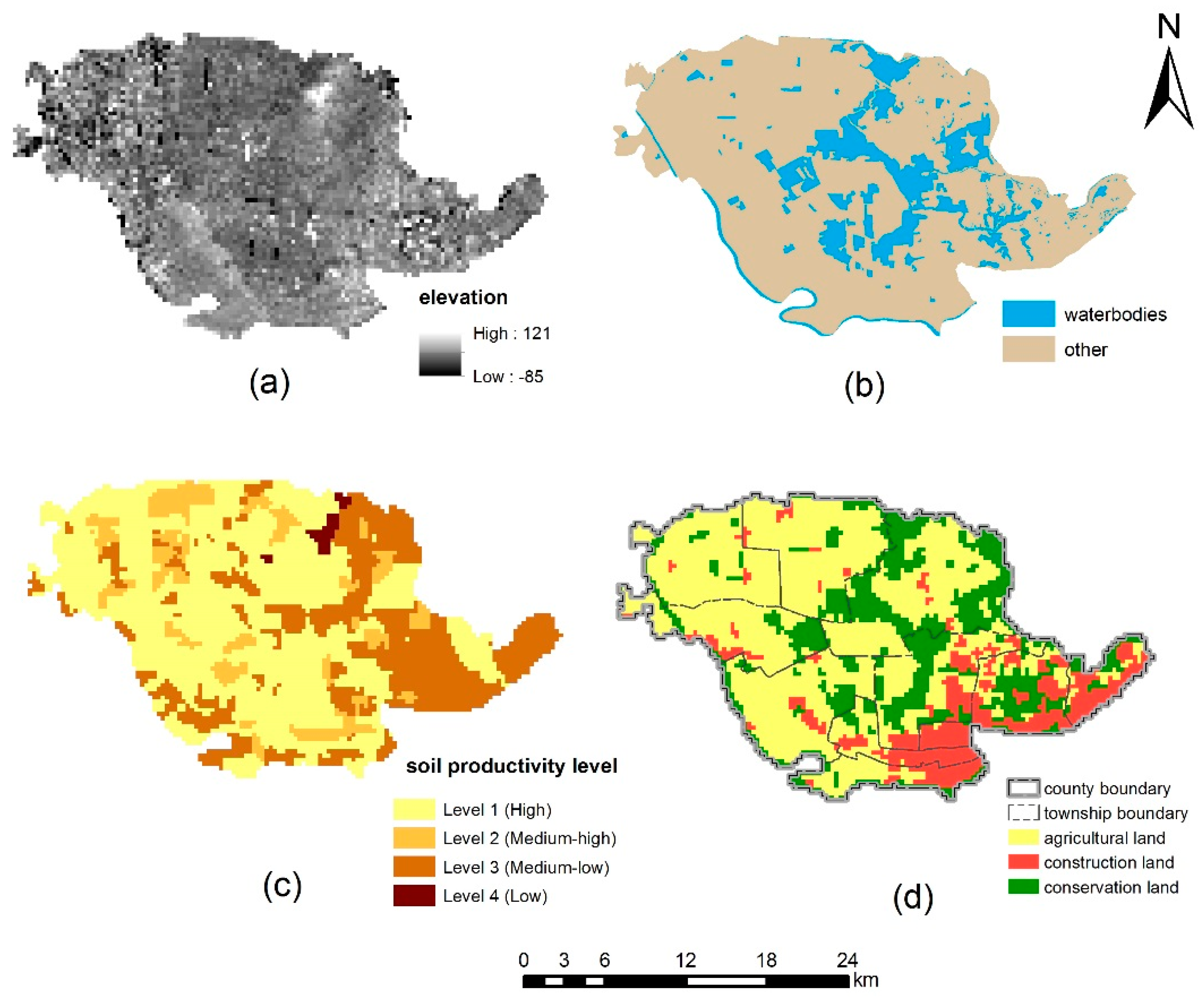
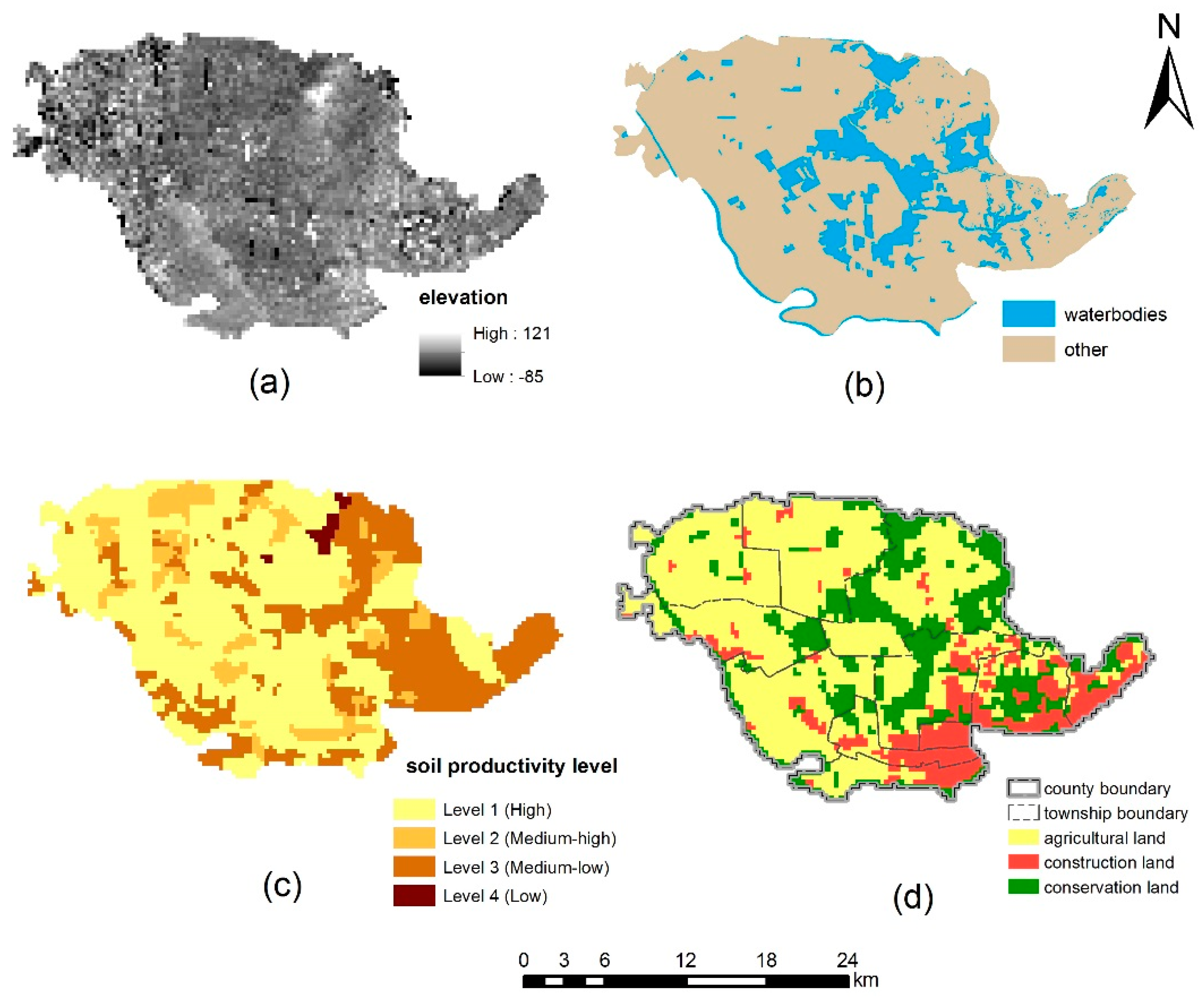
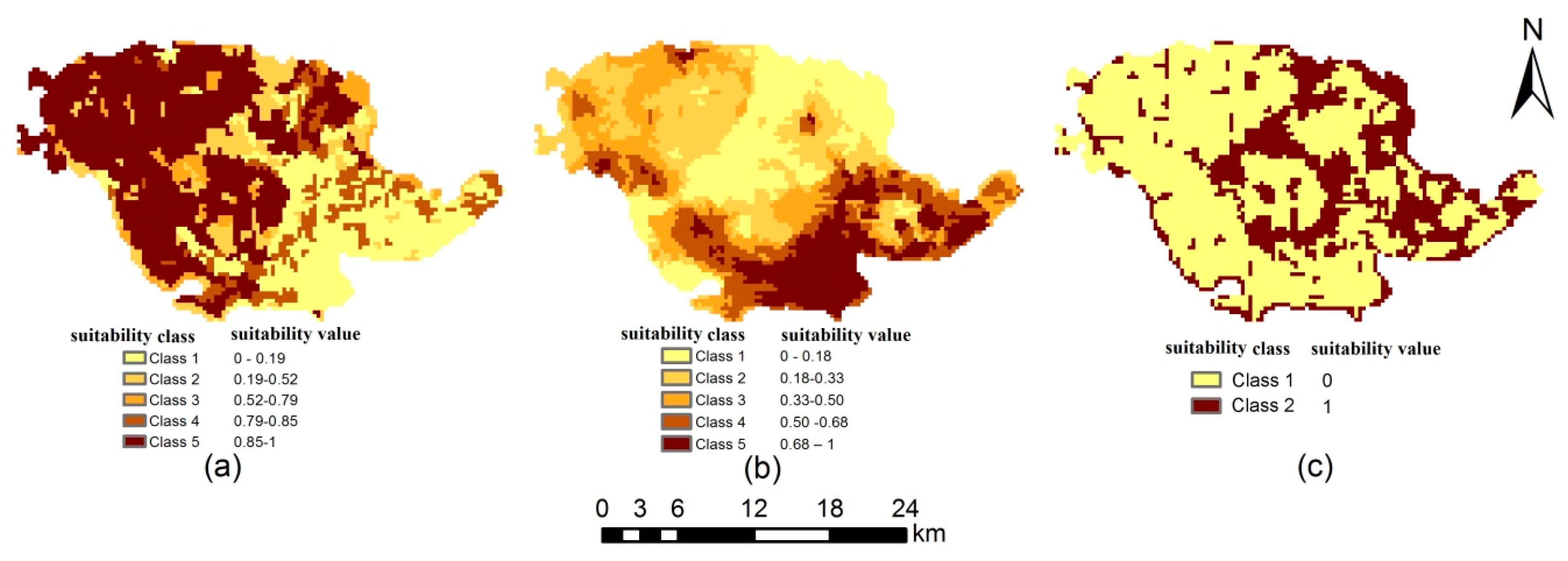
| Digital elevation model (DEM) (Figure 3a), water bodies (Figure 3b) | Data Center for Resources and Environmental Sciences, Chinese Academy of Sciences (RESDC) |
| Soil data (Figure 3c) | Published documents of the Second National Soil Census |
| Land use/cover data: | |
| GlobelLand30 land cover data (30 m resolution) | National Geomatics Center of China |
| Land use map (1:10,000) | Department of Land, Resource, and Planning of Dongxihu District |
| Land Use Type | Lower Limit | Upper Limit | ||||
|---|---|---|---|---|---|---|
| Percentage | Area (Hectare) | Number of Cells | Percentage | Area (Hectare) | Number of Cells | |
| Agriculture | 48.9% | 22,950 | 2550 | 50.8% | 23,823 | 2647 |
| Construction | 27.0% | 12,654 | 1406 | 29.0% | 13,617 | 1513 |
| Conservation | 25.5% | 11,979 | 1331 | 29.8% | 13,995 | 1555 |
| Criteria/Factors | References | |
|---|---|---|
| Topography | elevation, slope, aspect | [39,40,41,42,43,44,45,46] |
| Soil productivity | soil organic content, soil N content, active P (P2O5) content, active K (K2O) content, soil pH value, top soil depth, texture of soil | |
| Land use/cover | land use/cover type | |
| Drainage and irrigation system | drainage and irrigation system condition | |
| Location | adjacent land use, distance to urbanized area (urban center/township center), distance to current construction land, distance to main road | |
| Planning/policy compatibility | planned use in urban and rural comprehensive planning, planned use in city-level land use planning, planned use in county-level land use planning | |
| Criteria/Factors | References | |
|---|---|---|
| Physical factors | Topographical factors elevation, slope, landform | [47,48,49,50,51,52] |
| Geological factors subgrade bearing capacity, distance to areas prone to geological hazards | ||
| Hydrological factors distance to river, lake, and reservoir | ||
| Socio-economic factors | Population Population density | |
| Location and transportation distance to Wuhan central cities, distance to county urban center, distance to township center, distance to planned central villages, distance to highway entrance, distance to national/provincial/county road, distance to metro entrance | ||
| Economic conditions GDP per capita, land output, fiscal revenue | ||
| Accessibility to public service facility distance to (primary/secondary) school, distance to hospital/clinics | ||
| Land use land use type, construction land percentage, settlement scale | ||
| Ecological factors | Protected areas natural reserve zone, forest park, scenic site, historical site, wetland | |
| Criteria | Criterion Specification | References | |
|---|---|---|---|
| Hydrology | water source protection area river, lake, and reservoir and their buffer zone | 1000 m upstream of the intakes, 300 m downstream of the intakes (including three water intakes: Xihu Water Plant, Baiheju Water Plant, Wushidun Water Plant) Han River and its 300 m buffer, other rivers, lakes, and reservoirs and their 50 m buffer | [53,54,55,56,57] |
| Geology | areas prone to geological hazards | high elevation area (>40 m) area with steep slopes (>16°) | |
| Land cover/use | wetland, waterbody, urban green space, forest, grassland | ||
| Other protected areas | natural conservation areas, historical sites | Jinyinhu national wetland park, Fuhe wetland park Boquan ecological tourism zone | |
| Solutions | OFV | Area of Each Land Use (Hectare) | |||||
|---|---|---|---|---|---|---|---|
| Objective 1 | Objective 2 | Objective 3 | Objective 4 | Agriculture | Construction | Conservation | |
| a | 2056.58 | 877.73 | 1257.00 | 4252.90 | 23,814 | 12,654 | 13,140 |
| b | 1984.00 | 932.17 | 1290.00 | 4278.98 | 22,950 | 13,185 | 13,473 |
| c | 1953.69 | 872.11 | 1353.00 | 4213.67 | 22,959 | 12,654 | 13,995 |
| d | 1980.02 | 884.21 | 1311.00 | 4386.67 | 20,250 | 12,699 | 13,959 |
| Solutions | Number of Land Units | ||
|---|---|---|---|
| Agriculture | Construction | Conservation | |
| a | 23,490 | 12,960 | 13,158 |
| b | 22,635 | 13,482 | 13,491 |
| c | 22,698 | 13,086 | 13,824 |
| d | 22,608 | 13,095 | 13,905 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, M.; Chen, D.; Woodstock, K.; Zhang, Z.; Wu, Y. An RP-MCE-SOP Framework for China’s County-Level “Three-Space” and “Three-Line” Planning—An Integration of Rational Planning, Multi-Criteria Evaluation, and Spatial Optimization. Sustainability 2019, 11, 2997. https://doi.org/10.3390/su11112997
Song M, Chen D, Woodstock K, Zhang Z, Wu Y. An RP-MCE-SOP Framework for China’s County-Level “Three-Space” and “Three-Line” Planning—An Integration of Rational Planning, Multi-Criteria Evaluation, and Spatial Optimization. Sustainability. 2019; 11(11):2997. https://doi.org/10.3390/su11112997
Chicago/Turabian StyleSong, Mingjie, DongMei Chen, Katie Woodstock, Zuo Zhang, and Yuling Wu. 2019. "An RP-MCE-SOP Framework for China’s County-Level “Three-Space” and “Three-Line” Planning—An Integration of Rational Planning, Multi-Criteria Evaluation, and Spatial Optimization" Sustainability 11, no. 11: 2997. https://doi.org/10.3390/su11112997
APA StyleSong, M., Chen, D., Woodstock, K., Zhang, Z., & Wu, Y. (2019). An RP-MCE-SOP Framework for China’s County-Level “Three-Space” and “Three-Line” Planning—An Integration of Rational Planning, Multi-Criteria Evaluation, and Spatial Optimization. Sustainability, 11(11), 2997. https://doi.org/10.3390/su11112997