Abstract
This article presents interdisciplinary research on the social and technological aspects of interactions between older adults and the humanoid robot Pepper (SoftBank Robotics). Our case study is based on the regular meetings that are a part of an experimental intervention taking place at the Active Ageing Centre for older adults in Prague, run by the NGO Life 90. Through the methods of participant observation, unstructured interviews, analyses of video recordings from interventions with Pepper, and subsequent reflections on the “user” experience with the robot, we have unpacked the complexity of materiality and corporeality in older human–robot interactions (OHRI) in the context of age and gender. The project brings new applied knowledge, exploring OHRI using concepts relevant to gerotechnologies, informed by studies of materiality and ageing studies.
Keywords:
ageing; materiality; corporeality; humanoid robot Pepper; human–robot interactions; gender 1. Introduction
In recent decades, many types of developing technologies have moved from the private sphere into the lives of older adults in social and health care institutions. Through digital and robotic devices, technologies aim to provide better healthcare and communication support, fostering educational and leisure-time activities and interactions [1]. Understanding the relationship between ageing and technology has become a research aim for various interdisciplinary projects and research teams [2,3,4]. Technological innovations are often introduced as a solution to demographic changes in the population [5], even though this ageing-and-innovation discourse has been criticised as a (partly ageist) rhetorical device which prevents the development of meaningful technologies for older adults [6,7]. This study turns its gaze away from the grand narratives of demographic changes to the fundamentals of meaningful interactions between older adults and technologies and to the embodied materiality of these relations. Using the specific example of interactions between older adults and the social humanoid robot Pepper (SoftBank Robotics) in a community environment, we argue that the materiality of technology plays a significant role in the development of personal relationships with the robot, to the robot, and because of the robot, shaping the form and intensity of these interactions. At the same time, the humanoid form of the robot Pepper enables us to analyse the corporeality of human–robot interactions, with special attention to the ageing bodies of human actors.
2. Background
2.1. Corporeality, Materiality, and the Relationality of Technologies and (Ageing) Actors
Until the late 1960s, sociological research on materiality, the human body, and its role in social relationships had been rather scarce [8]. The re-orientation to the body brought to light the process of ageing, both in its material and embodied aspects, through which the human body simultaneously shapes and is shaped by society and culture [9] (pp. 16–19). In this article, we build on Gilleard and Higgs’ argument [9] by focusing on the corporeality of robotic and human bodies as social actants, with embodiment understood from the position of performing actions on or by the body in realising the social [10] (pp. 5–6); [11] (pp. 100–101). The research orientation toward the corporeality of ageing bodies allows us to better understand the relational dimension of ageing and its production in the interaction with technologies. As [12] points out, not only ageing bodies but also technologies are co-producers of the materiality of ageing, and they cannot be fully understood beyond their relationality [12] (p. 71). Bearing this in mind, our research follows up the three notions introduced by [13] (p. 1): (a) how age, as a social phenomenon, is being enacted with and through technologies; (b) how human and non-human agents are equally involved in this process; and (c) how the actions of these agents emerge from the agency distributed among them and structured through the power relations between them.
2.2. The “Failing” Body of the Technological “Other”
The rapidly evolving field of robotics has introduced a great number of technologies over the past decade. Based on a review of the existing literature, [14] propose a categorization of robots for older users, with respect to their function, into three groups: (a) robots as an aid in treatment; (b) robots as social assistants or home companions; and (c) robots as custodial caregivers. These functions (or software solutions) can be “embodied” in various physical forms through different types of hardware. These can basically be divided into five subgroups: machine, humanoid, animal, “wearables”, and AAL (ambient assisted living, typically as a system of inbuilt sensors spread within the built environment of one’s home connected by wire[less] communication systems). Humanoid robots may well serve as pre-programmed “puppets” when operated by professionals, for activation and motivation to support entertainment for older adults [15] (p. 189). The software that controls all the functions of the robot, from bodily motion to verbal expressions, is a product bound with and by its digital design, its architects, and their relationships and material environments. Various authors [16] seek to capture the complexity of these relationships through the concept of “digital materiality”, which includes computation and software. The algorithms designed to make the technology accessible and interactive are, therefore, a part of a vast social and cultural space of technological development, whose materiality is, to some extent, projected onto robots.
The robot, Pepper, is an example of a humanoid robot [17,18]. The robot has 17 joints to mimic human gestures and three wheels for omnidirectional movement (20 degrees of freedom in total). Pepper has four microphones on its head, two cameras, a 3D sensor in one of the “eyes”, and other inner and outer sensors. A tablet on Pepper’s chest can be used to show pictures or videos. The shape and size of Pepper’s body resemble an 8-to-10-year-old child of approximately 120 cm in height. It has a white plastic cover on its body with a light grey colour on the moving parts, such as the fingers and palm of the hand. Despite quite well-developed systems of motor machinery, its motoric capabilities are not suitable for precise tasks (the robotic hand is able to grasp only smaller soft objects). The “eyes” can be lit with different colours, signalling the inner processes, such as the colour blue or green when the robot is ready to listen to the command or an answer provided by the user. The red “eye” colour was conceived as threatening by the older users in our project (cf. our previous report on the technical features and project results in [19]). In terms of “hearing and speaking”, [20] conclude that several features need to be improved, such as the intonation of the words vocalized by Pepper, resulting in inappropriate responses by the older adult; differences in question-response time (i.e., the timing between Pepper’s questions and the responses of the older adult not timely and not matching, leading to confusion among the older users); and the inability to communicate with multiple older adults. In this paper, we offer some perspectives on how these “bodily features” resonate in the interactions between the robot and agentic active agers in community settings.
The preferred areas of Pepper’s application include social interaction and entertainment. There are two main components in the software for the Pepper robot. The first is a conversational agent, or chatbot, which converses with the user. The second is a set of entertainment applications, such as quizzes or games. Both of these components are activated upon user request [19]. The logic of the interaction follows the structure provided by pre-designed dialogue trees, which are always commenced by the robot. This technical feature guarantees a controlled flow of the topics in the conversational mode, as well as access to the menus in the entertainment mode. While all these features are understandable from a technical point of view, they also have symbolic value for the evaluation of the level of the partnership or control within the conversational exchanges. In other words, if the human actor is not behaving (speaking) in a way the robot is programmed to understand, or the human’s answers are not recorded in the available answer bank, the conversational exchange will not occur or evolve as one would expect in human-to-human exchanges. The “failure”, especially if too frequent, is recognized by the users as a technological shortcoming, resulting in various consequences for the dis/continuation of the interaction. As the “failure” of the robot (presented by the technological optimist as a supposedly compensatory machine) surprises the users, it reflects the high expectations brought into the relational (conversational) exchange, based mainly on popular culture as the main source of information on advanced technologies. However, there are few debates on the limitations of advanced technologies to deliver compensatory tasks, or even to perform the planned tasks in general (cf. [12,21]). From this point of view, it is not the “ageing bodies” who fail and underperform, but rather the technologies that do not deliver. This failure may be further interpreted in two ways, as a mirror (a meeting of two not-so-able-bodied bodies), or as a stepping stone. In the latter, the human body is viewed as better performing than the robot’s, despite the ageing processes, because it is still driven by the person’s will, as opposed to the robot´s will, whose software and computation power are too weak to perform as expected [20].1
3. Materials and Methods
The use of the humanoid robot Pepper (SoftBank Robotics) for older adults has been enabled through the project The use of the humanoid robot in promoting active ageing in older men and women (HUMR), conducted between 2019 and 2021 in the Czech Republic. This applied science project was set up as a collaboration between the Czech Institute of Informatics, Robotics and Cybernetics (CIIRC) of the Czech Technical University in Prague, the civic organisation, Gerontological Institute of Life 90 (Život 90), in Prague, and the sociology department of the Faculty of Social Studies at Masaryk University in Brno. The primary goal of the project was to establish interdisciplinary cooperation in making the robot Pepper “age-friendly” in three ways: (a) through improving the robot’s ability to use the Czech language better and in age-relevant topical contexts; (b) through the technical quality of its speech and overall presence that would be more comprehensible to older adults; and, (c) through the production of new software and content that would be of interest to this specific generational and social group of active agers. As a secondary goal, we have aimed to reopen the debates on the active ageing concept, its meanings, contents, and evaluations (cf. [22]), by reconsidering the still prevalent “three box life model” [23], and by underlining the positive effects of re-introducing the concept of “play” (e.g., in the form of edutainment, but also more generally in the form of humour, creativity, and playfulness) into the later life programme.
The robot was introduced to older adult groups associated with the educational and community activities of the Centre for Active Ageing (CAA), a part of the organisation Life 90 (Život 90, z.ú, Prague), through three types of interventions. Firstly, a small group of seniors (N = 12 participants, one man and 11 women) met regularly (twice per month) with the project team in the context of the series, “Lectures on Robotics for Seniors I”, for frontal instruction on the history of robotics, robots in popular culture, and the principles of programming content for a chatbot. As part of these activities, regular unstructured group “meetings” with the humanoid robot Pepper were also implemented. Secondly, the robot was placed in the CAA community space and offered to engage in unstructured interaction. Finally, during the COVID-19 pandemic, the “Lectures on Robotics for Seniors II” took place in the online environment of the Zoom application, with a smaller group of nine participants (one man, eight women) meeting regularly (weekly) to discuss the topic of creating “age-friendly” dialogue trees and content scenarios for the robot. Therefore, the robot Pepper and the human–robot interactions, although at the centre of the research attention, were also embedded in a series of interactions with other types of technologies (such as computer programmes for creating dialogue trees and online Zoom meetings with lectures and discussions, in which the participants could discuss their view on the robot’s visual image and behaviour). These activities, as well as the human–robot interactions, aimed at bridging the digital divide by closing the educational gap among older cohorts with regard to the latest technologies, machine learning, and artificial intelligence, and embedding interactions with the robot in the wider realm of working with technology.
In this article, we engage in the debate on (older) human–robot interaction (OHRI), looking more closely at its materiality, corporeality, and relationality. These three concepts had not previously been incorporated into the project objectives; instead, they were brought to our attention through the very processes of OHRI and follow-up human-to-human interactions (both online and offline), inspiring both internal and external interpretations. Through the methods of participant observation, unstructured interviews, analyses of video and audio recordings from the interventions with Pepper, and subsequent reflections on the “user” experience with the robot, we have unpacked the complexity of materiality and corporeality in older human–robot interactions. The video and audio recordings of interventions with Pepper were part of the “Lectures on Robotics for Seniors I” in 2019—video-capture interactions during the initial introduction of Pepper to the participants in October 2019—as well as two videos from a public presentation of the robot in the Life 90 centre as a part of “Academy for Seniors” programme in September 2020 in which the visitors could interact with the robot in the main hall of the centre, an open, public space. We estimate that there were about 200 encounters with the robot during this period, with an unknown share of repeated contacts and unknown sociodemographic characteristics of the older participants due to the nature of the space and intervention design. Additionally, during the COVID-19 pandemic in 2020 and 2021, the regular meetings with participants took place in the form of “Lectures on Robotics for Seniors II”. Meetings were held online (participants were writing dialogue trees for Pepper, sharing and discussing the media and popular culture contents on the social robots, and attending lectures on “the art of a dialogue” delivered by an external lecturer) and, during the last official meeting in April 2021, the interaction between the robot and participants was conducted over Zoom. Participants could observe how the robot implemented their dialogue trees in real-life communication. The project participants were recruited mainly from existing Life 90 clients, who are predominantly women. Therefore, although the activities were publicly advertised, the majority of the core group of participants were women, as well.
As stated above, this project was primarily designed as an intervention, but it was altered considerably due to the COVID-19 restrictions in effect for most of the duration of the project, affecting the methodologies and data available to us. This article therefore utilises a particular OHRI exchange as a case study (video, screenshots, and transcription are provided below), enriched by the knowledge gained throughout the project duration.
4. Results
4.1. Relationality, Humour, and the Repositioning of Power
Even though robots like Pepper should be able to fully participate in verbal interaction, there are still serious limitations in the computational and processing capacity of the robot, as well as its adaptability to older adults’ needs (see the support of development through the heterogeneity of experiences and user-centred design in [24]). During our interventions, there were several problematic points in the older human–robot interactions. The “body” and materiality of the robot are limited with regard to the recognition of weaker voices and changes in interaction which haven’t been pre-programmed into its system. Such interactions, then, had the tendency to result a mix of slight frustration and humorous scenarios, such as the one in this example:2
Pepper: Sorry, I lost track; what did you want to talk about?Woman1: I wanted to ask you if you also can sing. Can you sing?Pepper: I understand. I want to ask you what was the weirdest thing you ever had to eat...Woman1: Hey, listen, but I was asking you if you can sing...Pepper: It doesn’t matter. (people burst out laughing; Pepper inaudible)Woman1: Can you sing? Will you sing for us? (the lady raises her voice)Pepper: (silent)Woman1: He is stuck, on the food...Woman2: Are you thinking right now?Pepper: That is good; too much sugar can be dangerous for your health(people burst out laughing)Pepper: What do you usually have for breakfast?
The issue that manifested in the above situation concerned the power relations in the dialogue. The robot is programmed to be the one who always starts the communication with a question and therefore sets the interaction to suit its possibilities and limitations. The user must adjust to the communication style and use only selected questions and answers to lead a meaningful conversation. If the user attempts to take over and dominate the dialogue, the robot will try to incorporate the interaction back into its pre-prepared options, thus either changing the topic or the style of the conversation. The interaction then becomes a social field of power relations pre-structured by technology [13]. However, older users being unaware of the “rules” concerning who is in charge of the conversation, or deliberately attempting to work around these rules, led to situations perceived and labelled as humorous and entertaining, repositioning Pepper as a joker (or the Joker).
4.2. Relational Proximity and Distance
For the community part of the experimental intervention through meetings of the older active agers with the Pepper robot, the NGO project partners decided to display the robot in a busy hall on the first floor of the community centre building. The hall is used as a meeting point for the visitors to the Centre for Active Ageing. This space is a place of constant movement, with people coming and going, but also has places for people to sit, wait, read, and drink their coffee, alone or in interaction with others. It is a place for gazing and observation. Some of the seating allows users to see people coming out of the elevators, other allows people to watch the preparation of hot beverages in the small, open, self-service kitchen, while some spots offer a view of the open atrium and terraces used by the employees and visitors as a designated smoking area. It is also a drop-off place, a transitional spot to rearrange one’s possessions, coats, and bags when coming into the classrooms connected to the hall or when preparing to leave the building. The purpose of this place is to foster community. People enter into various types of encounters and relations here. As a technological object, Pepper was brought into this community and has become part of it by its sheer existence within the space previously not taken up by any other physical object belonging to it, other than for its original purpose (as would be a chair, a coat rack, a coffee table, a library, etc.). As expected, the novelty and unexpectedness would become important factors in the “presence” of the object, in being seen, but also in being seen as “inviting” for proximity, openness, and engendering curiosity. In this sense, Pepper’s presence aroused the curiosity of the visitors—the older participants would come near the robot, curious and excited to see what the object is and how it works. Other older participants knew that the robot is at the centre and came just to see it in “real life”, as one woman commented: “Now that I’ve read about it, I had to come and see what it does, and I am all over it (smiling and making excited gestures towards the robot)”.
During the interactional exchanges in the community centre, the materiality of the robot Pepper played a twofold role: as a “strange” material object that modified the environment of the centre, needed to be navigated around, taken into account when crossing the hall, etc., and as an entertainment tool that people can talk with, talk to, or talk about. These two roles often blended into each other and diversely reflected the materiality of ageing. The typical interaction with Pepper and the older participants in the centre consisted of a small group standing in a semi-circle in front of the robot and leaving a space of around one metre between the robot and the group. The space gap between the human and robot bodies reflected both respectable caution “not to destroy an expensive machine” and the hesitance to physically interact with new and unfamiliar technology. Those who were also participants in the “Lectures on Robotics for Seniors I” built a greater sense of familiarity over time. More frequent experience with the robot led to a narrowing of the gap and greater acceptance of the technology over the long term. These participants would take on the role of the robot´s ambassadors, always standing close by, but not keeping the robot for themselves, rather inviting other people to come and try to talk to Pepper. This role was not provisioned within the project design but was rather spontaneously embraced by those who would see the most benefit from the experiment, and it very efficiently supported the peer-to-peer segment of the teaching/learning component of the edutainment programme and technological divide closure.
Figure 1a–c: The dynamic of the human bodies in relation to the object-body of the robot Pepper.
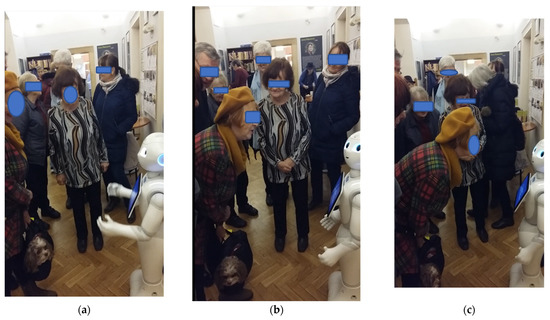
Figure 1.
Talking to the robot and about the robot (in the background) (a). Paying attention to the human actor (b). Getting closer but maintaining distance (c). Photographer: Lucie Vidovićová; photographs taken in public space with the actors’ permission.
Humanoid robots in a caring environment are often designed to be smaller and have only a few human traits. Several studies have shown that people above 65 years view the taller height of the robot and more anthropomorphic traits as intimidating and less acceptable [25,26]. However, due to Pepper’s short height (120 cm), there were only three types of positions that the older participants could adopt. They either had to (1) bow down to the robot to maintain “eye contact”, (2) move away from the robot and increase the distance, or (3) sit down in front of the robot. The participants in the group often tried to make “eye contact” with Pepper to establish more human-like communication. At the same time, Pepper is able to make “eye contact” only with one person at a time and is unequipped to communicate with more people at once. That sometimes caused a situation in which several people addressed Pepper at the same time trying to gain the robot’s attention so it would turn its head towards them but, as a result, Pepper would lose the ability to follow up with the pre-programmed conversational tree. This scenario would make the materiality of the distance between the robot and surrounding human bystanders irrelevant to relationship establishment.
4.3. Bodies and Genders in Interaction
The limitations of the robot were sometimes also interwoven with the limitations of the ageing bodies of participants in the form of poor hearing and not understanding the robot’s voice. For this reason, Pepper was programmed to talk rather loudly, which resulted in inconvenience for other visitors coming in for other reasons, such as language lessons or dancing. The other limitation of the robotic body was revealed when Pepper couldn’t climb stairs to the centre and had to be carried to places that even less-abled human bodies would be able to navigate but were not barrier-free for its wheels. In this manner, the materiality of the robot reflected the corporeality of ageing, as understood by [10], and generated responses in older users culturally reflective of interacting with and caring for a child or an older person.
The process of designing robots has been explored from a gender studies approach in the context of human-gender stereotypes [27], the importance of a robot’s “gender” in human–robot interactions [28,29], and gendered differences in attitudes toward robots [30]. The robot Pepper is advertised as a gender-neutral robot and has a childish voice, intended to be perceived as non-threatening to all genders. At the centre, only a few men participated in interactions with the robot. When Pepper was having trouble completing a task, and a professional was trying to adjust the robot, older participants (mostly women) began urging the worker to “leave the poor thing alone”, using a typical soft but firm protective/caring type of voice. The robot’s limitations in having trouble hearing, interacting, and “walking” up the stairs, along with its relatively small height and childish voice, triggered a nurturing instinct in some women users and reversed the role of care from robot to human.
The question of gender differences also arises in bodily human–robot interaction in relation to touch, which, in a caretaking environment, is sometimes addressed as a crucial part of the client relationship [15]. The physical contact in older human–robot interactions is greatly influenced by the materiality of the technologies. For example, the robotic seal, Paro, is a product created for the purpose of therapeutic effects from close physical interaction such as cuddling [31,32]. In the humanoid Pepper, there are only a few built-in contacts and tactile sensors, at the centre of the robot’s head and hands. These sensors also represent the reason Pepper was never dressed in clothes or accessories during the interventions, even though, during the reflections with older participants, there emerged a positive disposition towards the robot having clothes that would represent its character. However, even though the sensors were left uncovered, not many older users took the opportunity to touch Pepper. Only a few of the more experienced women users tried to pat Pepper on the head in the manner of caressing a child. They would do it with visible caution and hesitation, which would, however, dissolve after gaining some experience, but it would not become “a thing” except when taking “selfie” photographs to be shared with family and friends. In general, people would avoid touching Pepper´s hands, which moved more than the rest of the upper part of the body but not in any particularly unexpected or apparently threatening ways. Czech culture in general is not very tactile ([33], but cf. [34]); even greetings between friends usually take place at a distance, without handshakes or hugs, especially among older generations. Therefore, avoiding close touching of the robot may also be interpreted as a cultural standard, and/or a generational characteristic, as noted by [35].
The only male participant in the group meetings, when asked about what interests him in the robot, and what he would like to do “next”, repeatedly shared that he would like to “look inside of it”, remove the covers and see the hardware machinery. Notably, he was also the most hearing-impaired participant, unable to engage in most of the conversational content, but intensively engaging in gazing and enjoying “just the presence of Pepper”, demonstrating that his more “analytical” or technical interests did not rule out the more caring and social aspects this man was enjoying (as well as investing in) as a part of the experience.
The cultural embeddedness of human–robot interactions is also infamously known to reflect some of the gender, racial, and ageist biases occurring in human-to-human communication. According to [36], the technology design itself is formed by age-based assumptions. Apart from biases toward old age and ageing in AI design systems and machine learning algorithms [14,37], the reinforcement of digital ageism appears in the research. In the study of academic publications [38] points out that many of the studies in the field of human–robot interactions represent the relationship between technologies and older adults as inherently uneven, and are predisposed to view technologies as “enablers” and “fixers” of older age problems and inactivity. The older adults are, consequently, considered frail, burdensome, and responsible for “fixing” themselves by interacting with the technology. According to [38], this essentialist approach has been overcome by only a few authors trying to “acknowledge the heterogeneity of older adults and study them in a naturalistic setting” [38] (p. 462).
To reflect upon this criticism during the HUMR project, we followed the approach of actively involving the clients of the centre, not only in reflection but also in the creation of the content of the human–robot interactions. The clients of the centre actively participated in creating inputs for meaningful and age-friendly dialogues for Pepper and had the opportunity to try out dialogue-writing software. However, due to the difficulty with programming useful and usable dialogue trees, we decided, after hearing the reflections of older participants, to focus on creating short stand-up routines that would resonate better with the participants. If the interaction is conducted more like a stand-up, the power relations change to the benefit of the user—the robot has the position of a mere “king’s fool”, providing services and entertainment. The stand-up comedy approach is also more accessible for creating humorous situations. Humour is an integral part of social interaction, and, in some caring contexts, it serves as a coping strategy with mental and physical health effects [39]. According to [40], technologies such as robots and hand-held equipment could represent a tool to bring humour and joy into the everyday lives and events of older adults through human–robot interaction. An approach to interaction, in which the robot tells jokes, funny stories, and news, instead of small talk about hobbies, weather, and one’s health, was also suggested by older participants during our sessions, underscoring the point made by Wanka and Gallistl, that future research in socio-gerontechnology needs to focus more on the involvement of older adults in designing and negotiating meaningful technologies and their usage [41]. Active involvement seems to be the only way to avoid ageist and generationally based misconceptions about the type and content of the OHRI, especially in edutainment components.
5. Discussion and Conclusions
There were several layers of materiality, corporality, and relationality of the OHRI, which we were able to observe over the course of our project. First, the robot as a material, physical, hard, bright-white plastic object was part of the built environment, the physical space, taking up relatively small but still notable square decimetres. Secondly, there was materiality in the ways people would navigate their bodies around the robot as a physical object, both as a part of their journey through the space, towards the object, away from it, or around it during their more or less mindful trips to different destinations. Thirdly, there were distinct patterns of how the humans would relate to the robot and embody the relationship to/with it/him3. The relations and conversational exchanges (or attempts at such exchanges) would be embodied by the bodily posture, distance kept from the robot as a physical object, and facial expressions. At the same time, the humanoid form of the Pepper robot, per se, has “a body”, resembling a human in both its shape and its limitations. The relationality would materialise within the instances when the robot becomes both the subject and object of the newly established relations. Not only would participants (attempt to) relate to the robot, but people would enter into (new) conversational exchanges because of the robot, including both other members of the Life 90 community, as well as (but less frequently) with (younger) members of the project team supervising the functionality of the robot.4 With these observations, we follow up on the few studies that address the issue of materiality and corporeality of technologies in relation to older human bodies utilizing a more holistic approach [13]. There are several studies evaluating the Pepper robot and its social acceptability [43,44], and its ability to support care delivery [45,46] in care (nursing) home settings [47,48,49] with the patients and other users needing care, including dementia patients [20,50]. These studies generally arrive at similar conclusions as [51], namely, that the robot is able to meet various needs, such as making a person’s environment safe by alerting contact persons, reminding the user of health-related tasks, enabling “doubt-removal”, maintaining social relationships, and following the user. As such, a majority of these studies are concerned with safety (cf. [20,52]) and functionality; they neither test the agentic involvement of users nor look for the subtle hints on the material and corporeal aspects of the relationality between agentic active agers and entertaining technologies in humanoid, embodied forms. We offer our observations as a starting point for similar future endeavours.
At the same time, the project has shown that in OHRI interactions, the physical body of the robot (= hardware + its software drivers) is often only an intermediary between the user-agent and more or less hidden agents, who are themselves often dislocated in time and space from each other. Based on the data gathered for the HUMR project, we are able to show how these three elements and processes play out within the specific material composition of the relations between the corporealities of the users’ ageing bodies and the limited/disabled/malfunctioning body of the robot. In many aspects, we focused on the conventional (older) human–robot interaction concept [53] but from a different perspective on “human–human production interaction”, in which the human production part of the equation may be susceptible to a number of structural and individual factors, including ageism in design [54]. Therefore, the older users would often struggle, not with the technology in its materiality as such, but rather with the embedded expectations about the able-bodied, cognitively intact, and somewhat dull user. The fact that these elements are typically hidden when we observe and talk about OHRI as a mere dyad is intriguing. When researching interactions with Pepper, many of the studies present to the older participants only a ready-made object for interaction [47]. With this approach, the functions and interactions of the robot are hidden behind a “black box” effect. In our research, we have tried to bridge this gap by letting participants not only interact with the robot but also actively “administrate” his learning process and dialogue creation. In this way, we are going beyond “participatory design” [55] by evolving the interaction in “creative co-production”. Our attempt to make Pepper a more age-friendly product allowed us to observe the generational communication misunderstandings in the relational square of older adults, active ageing centre employees, social gerontologists, and programmers, including diminished expectations about the physical and learning limits of older users, accompanied by a lower interest in the outcomes, failing to see the older user as a valid (future) customer with solicited and appreciated feedback.
Limitations
As with any study, our approach had limitations to be dealt with in future endeavours. The original research plan involved weekly on-site interactions allowing for pre- and post-interaction empirical measurements that would capture the possible effects with quantitative methodologies. However, the uncertainty of several lockdowns and other preventive measures against the COVID-19 pandemic in Czechia severely interrupted the course of the project and considerably limited the pool of potential participants, as well as the possibilities to test various new software content. As mentioned earlier, the project was unable to increase interactions with the robot among older male users. All the aspects of the intervention activities were dominated by women and technology users. Additional actors and more variant topics of OHRI may produce wider observations on materiality, corporality, and relationality. Different results might also be achieved through the use of non-human robots. On one occasion, we tried using very similar content delivered by hardware covered in a brown paper box the size of a box of paper tissues. In this case, the actor´s body posture would still conform to the technology, but it appeared more like an embrace rather than contact at a distance. Further attention could be devoted to humanoid (or animal-like) robots, as opposed to more functional shapes of hardware. Informing other disciplines in this interdisciplinary endeavour, we, of course, confirm that the physical world has an undeniable power over the ageing (body) experience, but we need more studies to use socio-gerontological lenses to study things and objects “with wires” as a part of the physical environment and, possibly in the foreseeable future, as a part of age-friendly homes in the capacity of an entertainment/infotainment tool rather than substitutional carer or companion. We need to strive for a balance between a critical approach pointing at the embeddedness of technological ageism in the design, marketing, production, and distribution of advanced technologies, on the one side, and the healthy challenges posed by the higher expectations placed on agentic older users on the other. We have also learned about the underlying power disbalance resulting from the generational differences between us, as researchers bringing the newest technologies, just as the mythological Prometheus brought fire from the gods, and the older centre users, waiting to be entertained and being subjected to the functionality of the robot, the availability of staff to support the activity, etc. (cf. the above mentioned “puppet” analogy). If possible, future studies and interventions should further ensure the peer-to-peer support of the infotainment functions and make better use of the older technology champions.
These setbacks, however, did not influence our primary finding, namely, that using the humanoid robot Pepper can assist older adults in achieving a sense of connection to the larger world, even when mobility has decreased. Our data also suggest that humour can not only enhance human–robot interactions and is a viable way to access meaningful communication [43,53] but can also improve the older adult’s level of optimism and hope, thereby embodying the potential to decrease stress, anxiety, and loneliness. Age-friendly robotic design can further help to develop gero-technology and the use of technologies that both promote independence and autonomy in old age and strengthen the support networks of older people [56]. As opposed to care technologies designed to work in one-to-one settings, with goals such as remote surveillance and fighting loneliness, the community use of social robots seems to be better fitted to fulfil this mission.
Author Contributions
Conceptualization, L.V.; methodology, L.V.; investigation, L.V. and T.M.; resources, T.M. and L.V.; data curation, L.V.; writing—original draft preparation, T.M.; writing—review and editing, L.V.; visualization, L.V.; project administration, L.V.; funding acquisition, L.V. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Technology Agency of the Czech Republic, program Éta, grant number TL02000362.
Institutional Review Board Statement
The study was approved by the Research Ethics Committee of the Masaryk University (EKV-2018-044).
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Data Availability Statement
Data are available upon request from the authors.
Conflicts of Interest
The authors declare no conflict of interest.
Notes
| 1 | However, these expectations are also a reflection of expectations concerning able-bodiedness and high performance, typically based on popular culture notions of advanced robots who are equal or superior to humans, at least in body strength and endurance. |
| 2 | For the video of the interactional exchange, please visit: https://youtu.be/QvfpU4tPogU (accessed on 25 November 2022) (original in Czech, automatic translation available) |
| 3 | In the Czech language, robot, a Czech word by origin [42], is a masculine (he, him). The label Pepper is also understood by the Czechs as a male name. The HUMR project participants have chosen to call the robot Pepa (nickname for Joseph). As a result, we also opt to use the pronoun "he/him" instead of the inanimate "it". There are possible variations to distinguish humanoid from non-humanoid robots in the Czech language (roboti vs. roboty), but these grammatical distinctions are not widely used by lay social actors. |
| 4 | The functionalities of the robot are supported by an online application running on a separate laptop computer. During the interventions, as the robot performed, the technical support would be hidden in one of the classrooms on the same floor of the four-story building. Occasionally, other project team members would be present in the cafeteria or close to the robot to observe the interactions, and this would present itself as an opportunity for the Life 90 visitors to pose questions or to share their ideas about the robot. |
References
- Abdi, J.; Al-Hindawi, A.; Ng, T.; Vizcaychipi, M.P. Scoping Review on the Use of Socially Assistive Robot Technology in Elderly Care. BMJ Open 2018, 8, e018815. [Google Scholar] [CrossRef] [PubMed]
- Nørskov, M. (Ed.) Social Robots: Boundaries, Potential, Challenges; Ashgate: Dorchester, UK, 2016. [Google Scholar]
- Korn, O. (Ed.) Social Robots: Technological, Societal and Ethical Aspects of Human-Robot Interaction; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Peine, A.; Marshall, B.; Martin, W.; Neven, L. (Eds.) Socio-Gerontechnology: Interdisciplinary Critical Studies of Ageing and Technology; Routledge: London, UK, 2021. [Google Scholar]
- Linner, T.; Güttler, J.; Bock, T.; Georgoulas, C. Assistive Robotic Micro-rooms for Independent Living. Autom. Constr. 2015, 51, 8–22. [Google Scholar] [CrossRef]
- Neven, L. By any Means? Questioning the Link between Gerontechnological Innovation and Older People’s Wish to Live at Home. Technol. Forecast. Soc. Chang. 2015, 93, 32–43. [Google Scholar] [CrossRef]
- Neven, L.; Peine, A. From Triple Win to Triple Sin: How a Problematic Future Discourse is Shaping the Way People Age with Technology. Societies 2017, 7, 26. [Google Scholar] [CrossRef]
- Turner, B.S. Recent Developments in the Theory of the Body. In The Body: Social Process and Cultural Theory; Featherstone, M., Hepworth, M., Turner, B.S., Eds.; Sage Publications: London, UK, 1991; pp. 1–35. [Google Scholar]
- Gilleard, C.; Higgs, P. Ageing, Corporeality and Embodiment; Anthem Press: London, UK, 2013. [Google Scholar]
- Gilleard, C.; Higgs, P. Unacknowledged Distinctions: Corporeality Versus Embodiment in Later Life. J. Aging Stud. 2018, 45, 5–10. [Google Scholar] [CrossRef] [PubMed]
- Gilleard, C.; Higgs, P. Agents or Actants: What Technology Might Make of Later Life? In Socio-Gerontechnology: Interdisciplinary Critical Studies of Ageing and Technology; Peine, A., Marshall, B., Martin, W., Neven, L., Eds.; Routledge: London, UK, 2021; pp. 99–111. [Google Scholar]
- Cozza, M. Elderliness: The Agential Inseparability of Ageing and Assistive Technologies. In Socio-Gerontechnology: Interdisciplinary Critical Studies of Ageing and Technology; Peine, A., Marshall, B., Martin, W., Neven, L., Eds.; Routledge: London, UK, 2021; pp. 70–84. [Google Scholar]
- Wanka, A.; Gallistl, V. Doing Age in a Digitized World—A Material Praxeology of Aging With Technology. Front. Sociol. 2018, 3. [Google Scholar] [CrossRef]
- Pedersen, I.; Reid, S.; Aspevig, K. Developing Social Robots for Aging Populations: A Literature Review of Recent Academic Sources. Sociol. Compass 2018, 12, e12585. [Google Scholar] [CrossRef]
- Parviainen, J.; Turja, T.; Van Aerschot, L. Social Robots and Human Touch in Care: The Perceived Usefulness of Robot Assistance among Healthcare Professionals. In Social Robots: Technological, Societal and Ethical Aspects of Human-Robot Interaction; Korn, O., Ed.; Springer: Cham, Switzerland, 2019; pp. 187–204. [Google Scholar]
- Poulsgaard, K.S.; Malafouris, L. Understanding the Hermeneutics of Digital Materiality in Contemporary Architectural Modelling: A Material Engagement Perspective. AI Soc. 2020, 1–11. [Google Scholar] [CrossRef]
- Pandey, A.K.; Gelin, R. A Mass-produced Sociable Humanoid Robot: Pepper: The First Machine of its Kind. IEEE Robot. Autom. Mag. 2018, 25, 40–48. [Google Scholar] [CrossRef]
- Papadopoulos, C.; Hill, T.; Battistuzzi, L.; Castro, N.; Nigath, A.; Randhawa, G.; Merton, L.; Kanoria, S.; Kamide, H.; Chong, N.-Y.; et al. The CARESSES Study Protocol: Testing and Evaluating Culturally Competent Socially Assistive Robots among Older Adults Residing in Long Term Care Homes through a Controlled Experimental Trial. Arch. Public Health 2020, 78, 1–10. [Google Scholar] [CrossRef]
- Matulík, M.; Vavrečka, M.; Vidovićová, L. Edutainment Software for the Pepper Robot. In Proceedings of the 2020 4th International Symposium on Computer Science and Intelligent Control, Newcastle upon Tyne, UK, 10–12 August 2020; Association for Computing Machinery: New York, NY, USA, 2020; pp. 1–5. [Google Scholar]
- Miyagawa, M.; Yasuhara, Y.; Tanioka, T.; Locsin, R.; Kongsuwan, W.; Catangui, E.; Matsumoto, K. The Optimization of Humanoid Robot’s Dialog in Improving Communication between Humanoid Robot and Older Adults. Intell. Control Autom. 2019, 10, 118–127. [Google Scholar] [CrossRef][Green Version]
- Tian, L.; Carreno-Medrano, P.; Allen, A.; Sumartojo, S.; Mintrom, M.; Zuniga, E.C.; Kulic, D. Redesigning Human-robot Interaction in Response to Robot Failures: A Participatory Design Methodology. In Proceedings of the CHI’21: ACM CHI Conference on Human Factors in Computing Systems, Yokohama, Japan, 8–13 May 2021; ACM: New York, NY, 2021; pp. 1–8. [Google Scholar]
- Vidovićová, L. The Expected, Evaluated, Perceived, Valued and Prevalent Social Roles of Older People: Are They by Consent? In Building Evidence for Active Ageing Policies: Active Ageing Index and Its Potential; Zaidi, A.O., Harper, S., Howse, K., Lamura, G., Perek-Białas, J., Eds.; Palgrave Macmillan: Singapore, 2018; pp. 39–54. [Google Scholar]
- Dannefer, D.; Uhlenberg, P.; Foner, A.; Abeles, R.P. On the Shoulders of a Giant: The Legacy of Matilda White Riley for Gerontology. J. Gerontol. Ser. B 2005, 60, S296–S304. [Google Scholar] [CrossRef] [PubMed]
- Søraa, R.A.; Tøndel, G.; Kharas, M.; Serrano, J.A. What do Older Adults Want from Social Robots? A Qualitative Research Approach to Human-Robot Interaction (HRI) Studies. Int. J. Soc. Robot. 2022, 1–14. [Google Scholar] [CrossRef]
- Arras, K.O.; Cerqui, D. Do We Want to Share our Lives and Bodies with Robots? A 2000 People Survey; Technical Report Nr. 0605-001; Autonomous Systems Lab, Swiss Federal Institute of Technology: Lausanne, Switzerland, 2005. [Google Scholar]
- Wu, Y.-H.; Fassert, C.; Rigaud, A.-S. Designing Robots for the Elderly: Appearance Issue and Beyond. Arch. Gerontol. Geriatr. 2012, 54, 121–126. [Google Scholar] [CrossRef]
- Tay, B.T.C.; Park, T.; Jung, Y.; Tan, Y.K.; Wong, A.H.Y. When Stereotypes Meet Robots: The Effect of Gender Stereotypes on Peoples Acceptance of a Security Robot. In Engineering Psychology and Cognitive Ergonomics. Understanding Human Cognition; Harris, D., Ed.; Springer: Berlin/Heidelberg, German, 2013; pp. 261–270. [Google Scholar]
- Siegel, M.; Breazeal, C.; Norton, M.I. Persuasive Robotics: The Influence of Robot Gender on Human Behavior. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 2563–2568. [Google Scholar]
- Jackson, R.; Williams, T.; Smith, N. Exploring the Role of Gender in Perceptions of Robotic Noncompliance. In Proceedings of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, Cambridge, UK, 23–26 March 2020; pp. 559–567. [Google Scholar]
- Wang, Y.; Young, J.E. Beyond Pink and Blue: Gendered Attitudes Towards Robots in Society. Proceedings of Gender and IT Appropriation. Sci. Pract. Dialogue—Forum Interdiscip. Exch. 2014, 49–59. [Google Scholar]
- Takayanagi, K.; Kirita, T.; Shibata, T. Comparison of Verbal and Emotional Responses of Elderly People with Mild/Moderate Dementia and Those with Severe Dementia in Responses to Seal Robot, PARO. Front. Aging Neurosci. 2014, 6, 257. [Google Scholar] [CrossRef]
- Moyle, W.; Jones, C.J.; Murfield, J.E.; Thalib, L.; Beattie, E.R.A.; Shum, D.K.H.; O’Dwyer, S.T.; Mervin, M.C.; Draper, B.M. Use of a Robotic Seal as a Therapeutic Tool to Improve Dementia Symptoms: A Cluster-Randomized Controlled Trial. J. Am. Med. Dir. Assoc. 2017, 18, 766–773. [Google Scholar] [CrossRef]
- Kopůnková, S. Non-Verbal Communication across Cultures: Gestures and Facial Expressions in Business Meetings in France and the Czech Republic. Univerzita Tomáše Bati ve Zlíně: Zlín, Czech Republic, 2020; Available online: https://hdl.handle.net/10563/48706 (accessed on 25 November 2022).
- Dibiase, R.; Gunnoe, J. Gender and Culture Differences in Touching Behavior. J. Soc. Psychol. 2010, 144, 49–62. [Google Scholar] [CrossRef]
- Aaltonen, I.; Arvola, A.; Heikkilä, P.; Lammi, H. Hello Pepper, May I Tickle You? Children’s and Adults’ Responses to an Entertainment Robot at a Shopping Mall. In Proceedings of the Companion of the 2017 ACM/IEEE International Conference on Human-Robot Interaction, HRI’17, Vienna, Austria, 6–9 March 2017; Association for Computing Machinery: New York, NY, USA, 2017; pp. 53–54. [Google Scholar] [CrossRef]
- Neven, L. But Obviously not for me: Robots, Laboratories and the Defiant Identity of Elder Test Users. Sociol. Health Illn. 2010, 32, 335–347. [Google Scholar] [CrossRef]
- Chu, C.H.; Nyrup, R.; Leslie, K.; Shi, J.; Bianchi, A.; Lyn, A.; McNicholl, M.; Khan, S.; Rahimi, S.; Grenier, A. Digital Ageism: Challenges and Opportunities in Artificial Intelligence for Older Adults. Gerontol. 2022, 62, 947–955. [Google Scholar] [CrossRef]
- Burema, D. A Critical Analysis of the Representations of Older Adults in the Field of Human–Robot Interaction. AI Soc. 2022, 37, 455–465. [Google Scholar] [CrossRef]
- Chadwick, D.D.; Platt, T. Investigating Humor in Social Interaction in People With Intellectual Disabilities: A Systematic Review of the Literature. Front. Psychol. 2018, 9, 1745. [Google Scholar] [CrossRef] [PubMed]
- Monahan, K. The Use of Humor With Older Adults Aging in Place. Soc. Work. Ment. Health 2015, 13, 61–69. [Google Scholar] [CrossRef]
- Wanka, A.; Gallistl, V. Age, Actors and Agency: What We Can Learn from Age Studies and STS for the Development of Socio-gerontechnology. In Socio-Gerontechnology: Interdisciplinary Critical Studies of Ageing and Technology; Peine, A., Marshall, B., Martin, W., Neven, L., Eds.; Routledge: London, UK, 2021; pp. 24–39. [Google Scholar]
- Čapek, K. R.U.R. Rossum’s Universal Robots: Kolektivní Drama o Vstupní Komedii a Třech Aktech; Ot. Štorch-Marien, Aventinum: Praha, Czech Republic, 1920. [Google Scholar]
- Bechade, L.; Duplessis, G.D.; Devillers, L. Empirical Study of Humor Support in Social Human-Robot Interaction. In Distributed, Ambient and Pervasive Interactions; Streitz, N., Markopoulos, P., Eds.; Springer: Cham, Switzerland, 2016; pp. 305–316. [Google Scholar]
- Cormons, L.; Poulet, C.; Pellier, D.; Pesty, S.; Fiorino, H. Testing Social Robot Acceptance: What If You Could Be Assessed for Dementia by a Robot? A Pilot Study. In Proceedings of the 2020 6th International Conference on Mechatronics and Robotics Engineering (ICMRE), Barcelona, Spain, 12–15 February 2020; pp. 92–98. [Google Scholar] [CrossRef]
- Tanioka, T. Nursing and Rehabilitative Care of the Elderly Using Humanoid Robots. J. Med. Investig. 2019, 66, 19–23. [Google Scholar] [CrossRef]
- Piezzo, C.; Suzuki, K. Feasibility Study of a Socially Assistive Humanoid Robot for Guiding Elderly Individuals during Walking. Future Internet 2017, 9, 30. [Google Scholar] [CrossRef]
- Carros, F.; Meurer, J.; Löffler, D.; Unbehaun, D.; Matthies, S.; Koch, I.; Wieching, R.; Randall, D.; Hassenzahl, M.; Wulf, V. Exploring Human-Robot Interaction with the Elderly: Results from a Ten-Week Case Study in a Care Home. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020; pp. 1–12. [Google Scholar]
- Blindheim, K.; Solberg, M.; Hameed, I.A.; Alnes, R.E. Promoting activity in long-term care facilities with the social robot Pepper: A pilot study. Inform. Health Soc. Care 2022, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Martinez-Martin, E.; Escalona, F.; Cazorla, M. Socially Assistive Robots for Older Adults and People with Autism: An Overview. Electronics 2020, 9, 367. [Google Scholar] [CrossRef]
- Tanioka, T.; Yokotani, T.; Tanioka, R.; Betriana, F.; Matsumoto, K.; Locsin, R.; Zhao, Y.; Osaka, K.; Miyagawa, M.; Schoenhofer, S. Development Issues of Healthcare Robots: Compassionate Communication for Older Adults with Dementia. Int. J. Environ. Res. Public Health 2021, 18, 4538. [Google Scholar] [CrossRef]
- Fattal, C.; Cossin, I.; Pain, F.; Haize, E.; Marissael, C.; Schmutz, S.; Ocnarescu, I. Perspectives on usability and accessibility of an autonomous humanoid robot living with elderly people. Disabil. Rehabil. Assist. Technol. 2022, 17, 418–430. [Google Scholar] [CrossRef]
- Betriana, F.; Tanioka, T.; Osaka, K.; Kawai, C.; Yasuhara, Y.; Locsin, R.C. Interactions between Healthcare Robots and Older People in Japan: A Qualitative Descriptive Analysis Study. Jpn. J. Nurs. Sci. 2021, 18, e12409. [Google Scholar] [CrossRef]
- Oliveira, R.; Arriaga, P.; Axelsson, M.; Paiva, A. Humor—Robot Interaction: A Scoping Review of the Literature and Future Directions. Int. J. Soc. Robot. 2021, 13, 1369–1383. [Google Scholar] [CrossRef]
- Neves, B.; Vetere, F. (Eds.) Ageing and Digital Technology: Designing and Evaluating Emerging Technologies for Older Adults; Springer: Singapore, 2019. [Google Scholar]
- Pedell, S.; Constantin, K.; Muñoz, D.; Sterling, L. Designing Meaningful, Beneficial and Positive Human Robot Interactions with Older Adults for Increased Wellbeing During Care Activities. In Handbook of Artificial Intelligence in Healthcare; Intelligent Systems Reference Library; Lim, C.P., Chen, Y.W., Vaidya, A., Mahorkar, C., Jain, L.C., Eds.; Springer: Cham, Switzerland, 2022; pp. 85–108. [Google Scholar]
- Fischer, B.; Peine, A.; Östlund, B. The Importance of User Involvement: A Systematic Review of Involving Older Users in Technology Design. Gerontologist 2020, 60, e513–e523. [Google Scholar] [CrossRef] [PubMed]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).