
Parallel Power Sharing Control of Multi-Controllable Rectifiers in a High-Power DC Fast Charging Station


Abstract
:1. Introduction
- (1)
- The power sharing controller parameters based on virtual impedance control are designed, including the current loop, voltage loop proportional integral (PI) controller parameters, and virtual impedance parameters. Considering the bandwidth and stability of the current loop and voltage loop, the parameters of the PI controller are designed. According to the principle of shielding the natural output impedance of the system and ensuring the fluctuation range of the DC bus voltage, the virtual impedance is designed to realize the stability of the DC bus voltage and the power sharing of multiple controllable rectifier modules.
- (2)
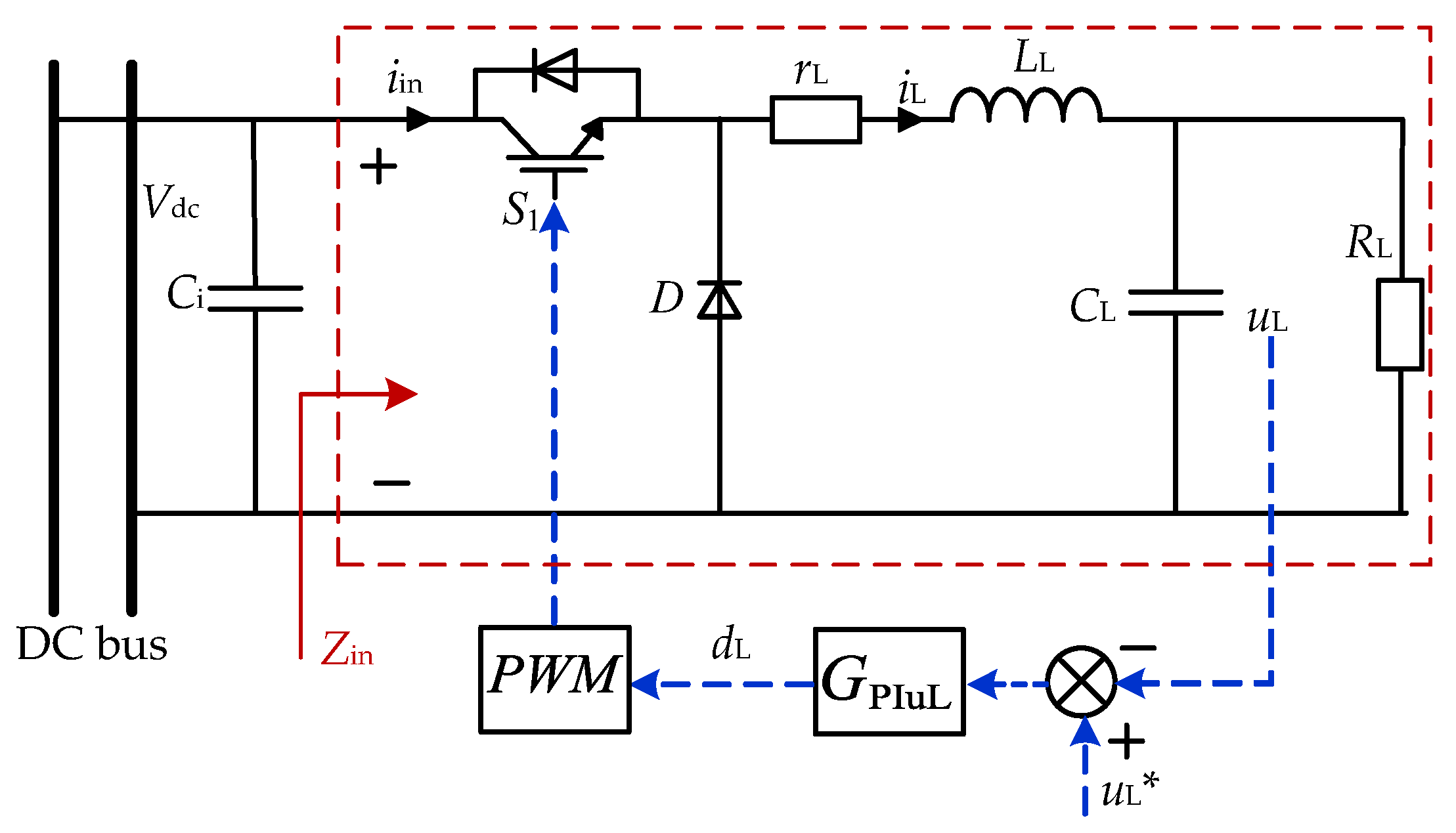
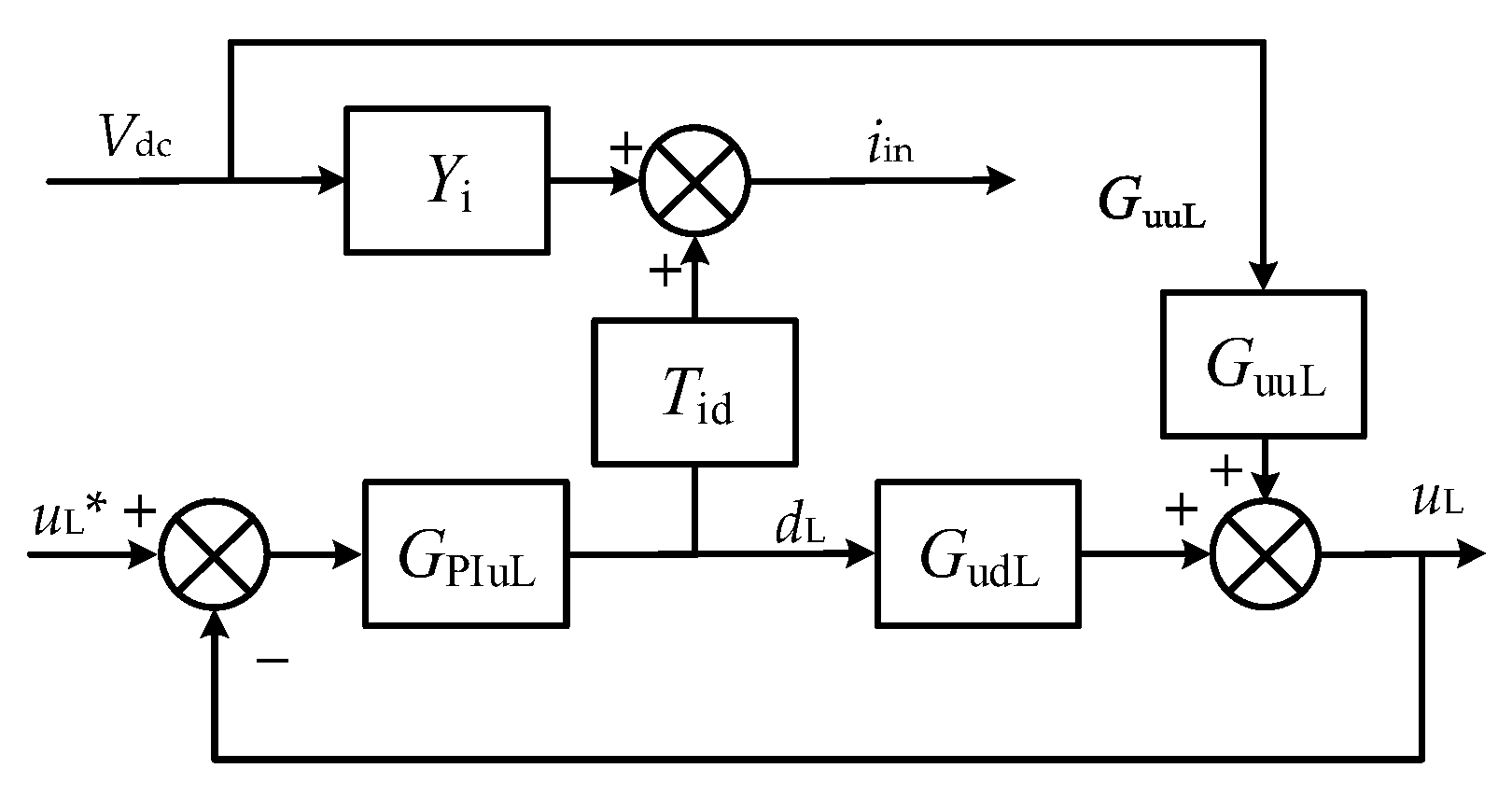
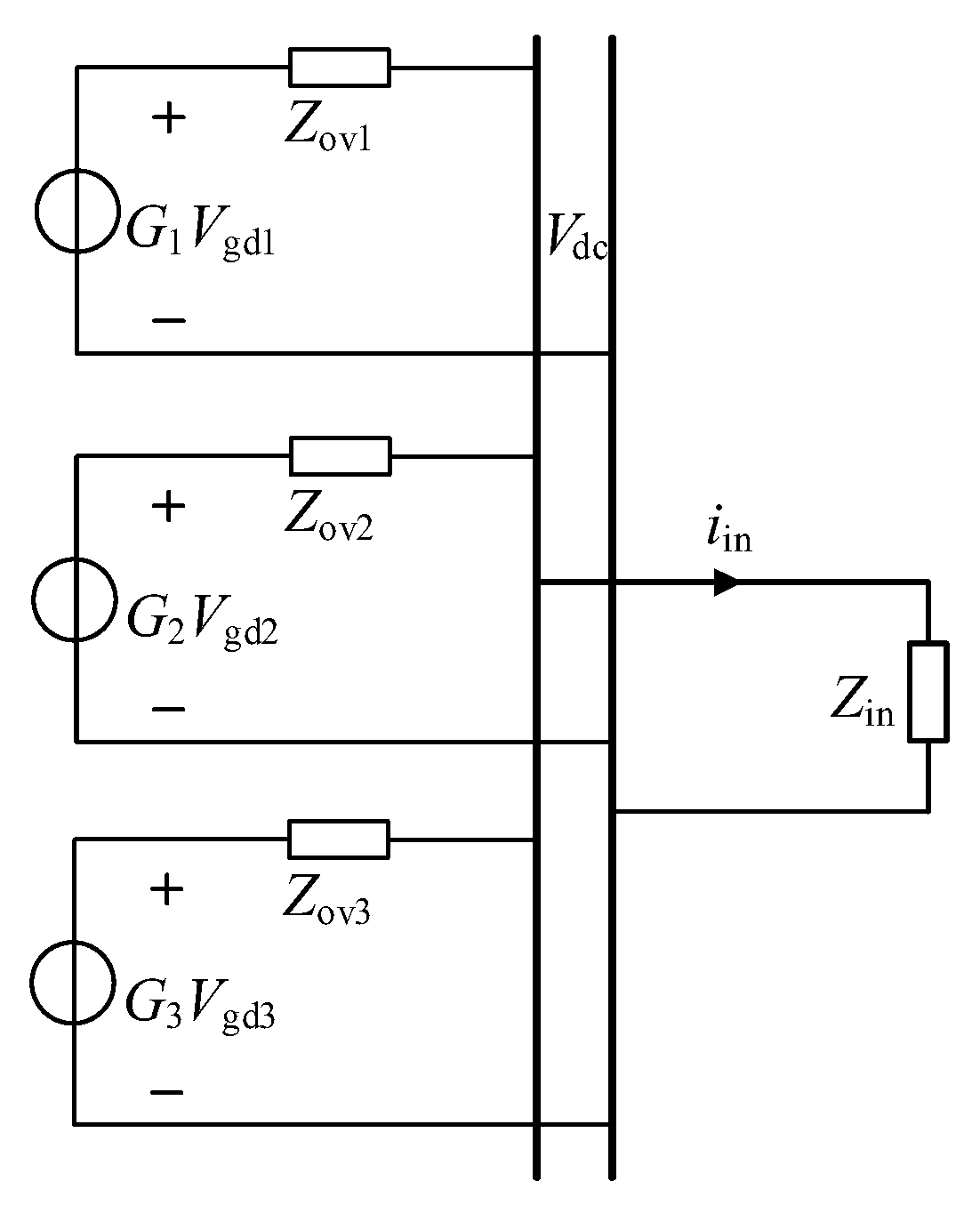
- Considering that an EV can be equivalent to a constant power load when it is charged with a constant current, a constant voltage-controlled Buck converter with a resistive load is used to simulate the constant power load, and a mathematical model of its input impedance is established. Using the impedance analysis method, the cascaded system composed of multiple parallel controllable rectifier modules and a DC–DC converter is used to study the maximum load that can be tolerated when EV is charged with a constant current.
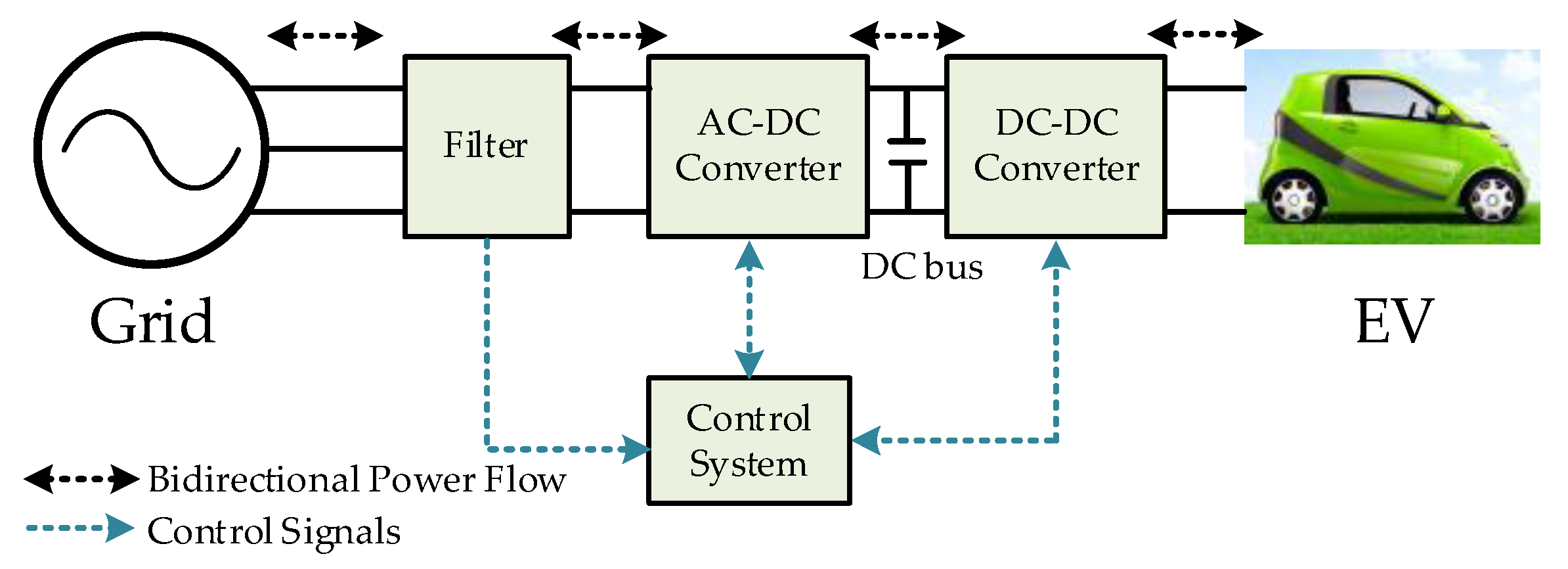
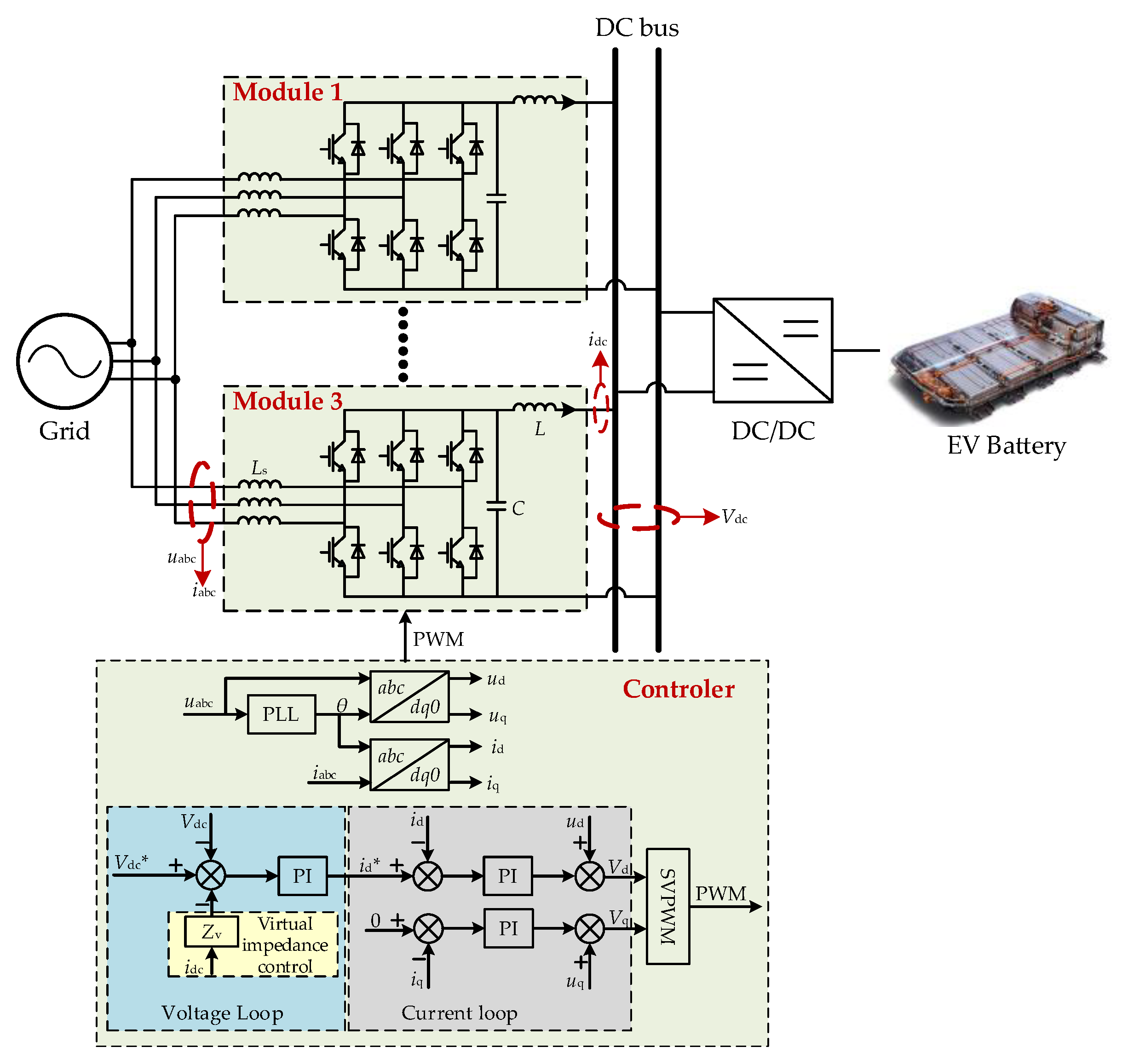
2. High-Power DC Fast Charging Station Topology and Controller Structure
3. Parameter Design of the Power Sharing Controller
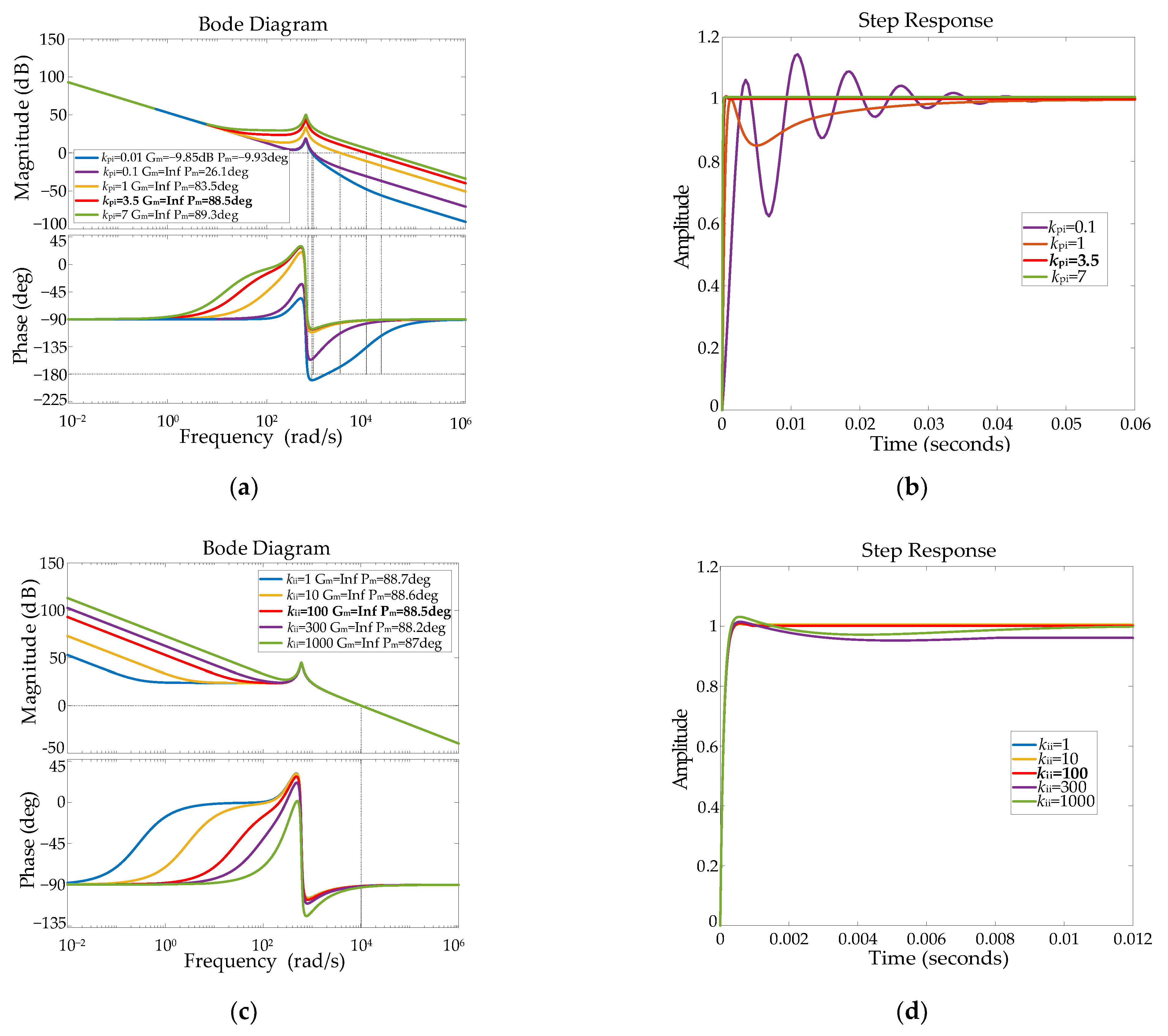
3.1. Current Loop
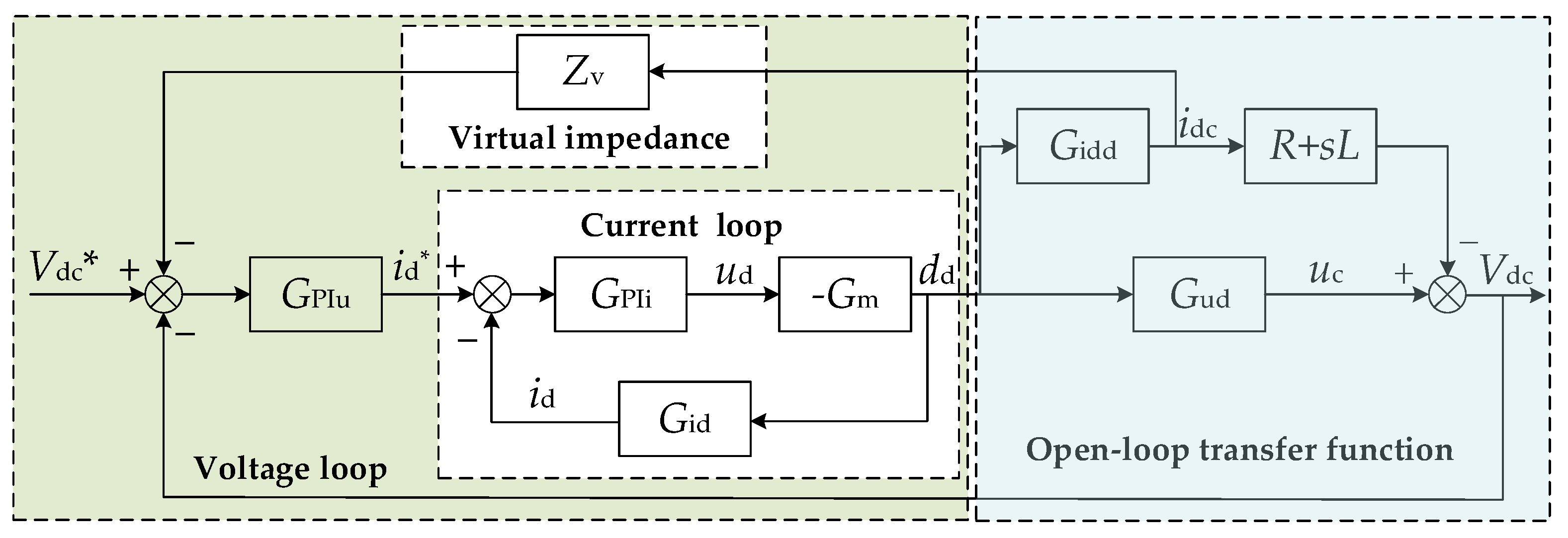
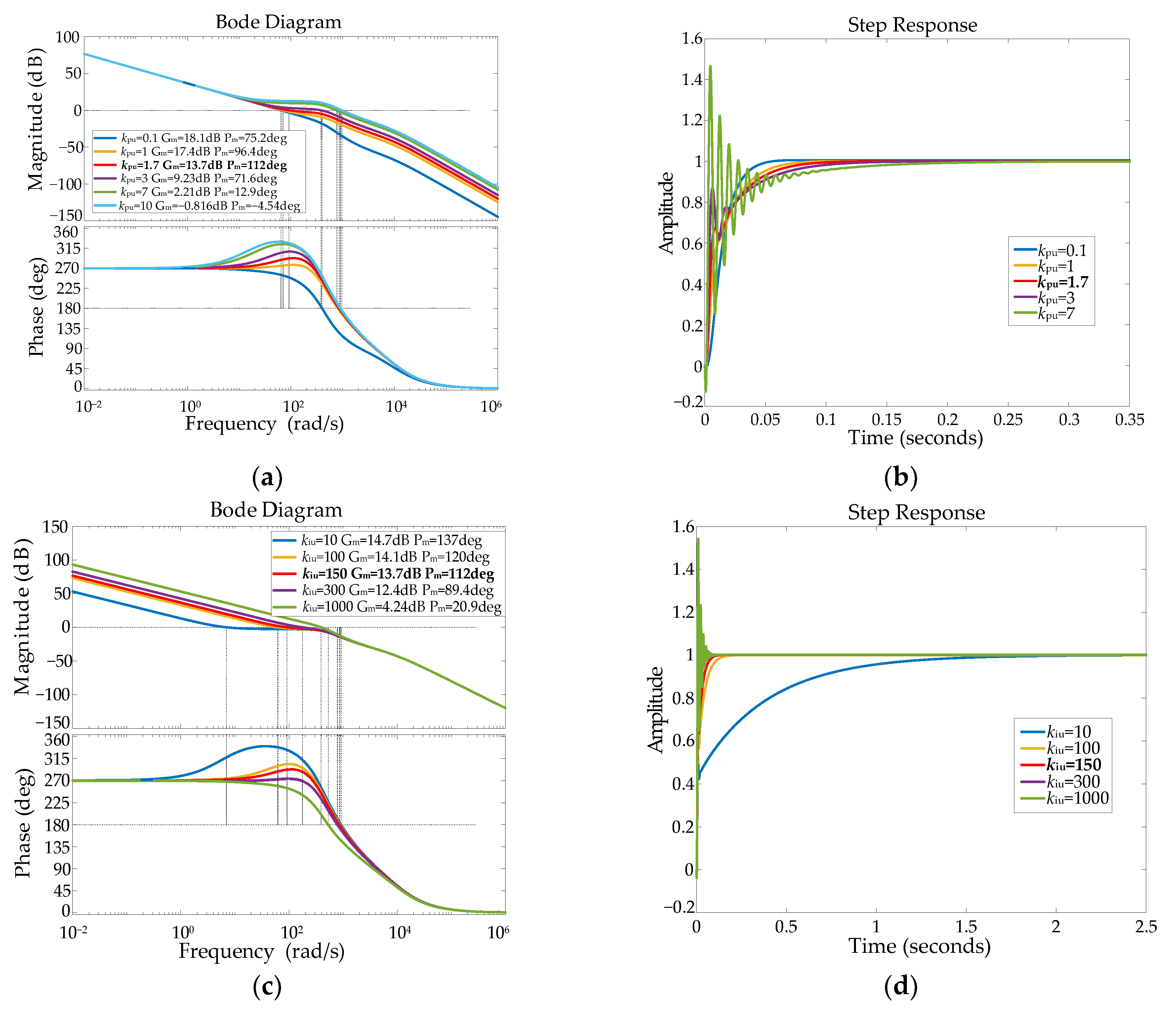
3.2. Voltage Loop
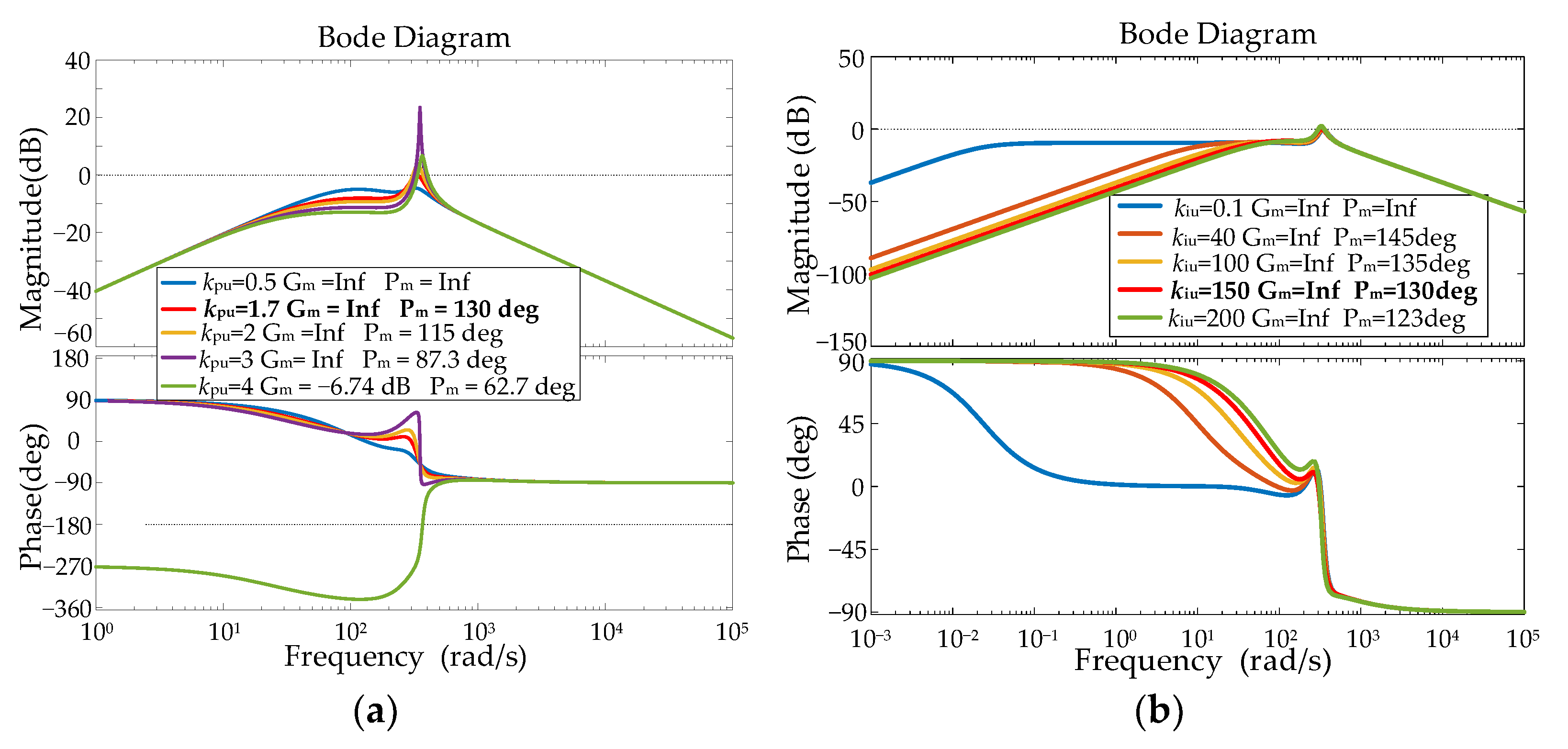
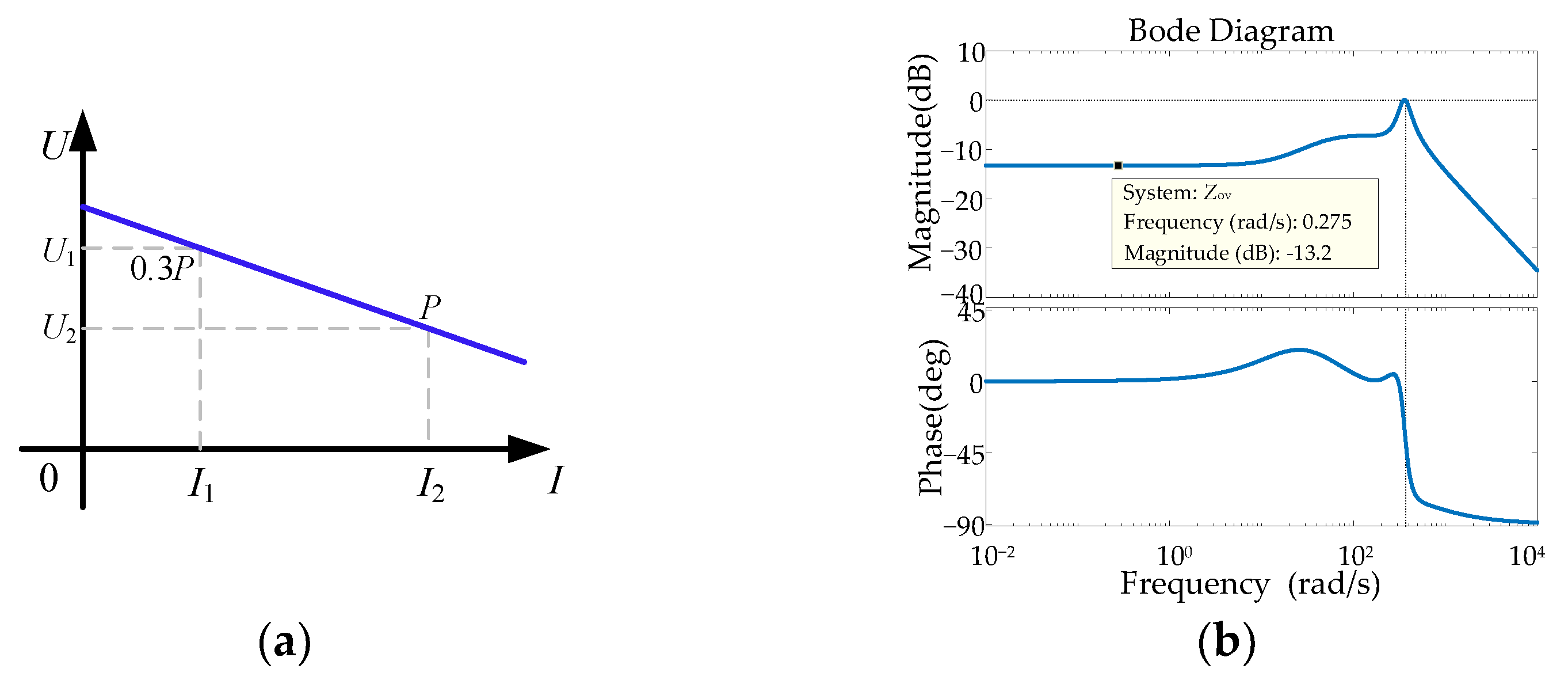
3.3. Virtual Impedance
- (1)
- The virtual impedance Zv must be greater than the natural output impedance Zno to reduce the influence of natural impedance on the power sharing amongst different modules;
- (2)
- The droop in the DC bus voltage after adding the virtual impedance cannot exceed 5% of the rated voltage when the load power changes from 30% rated power to full-load;
- (3)
- It is necessary to consider the load capacity of the system. If the virtual impedance is designed to be too large, it will increase the output impedance of the source and reduce the overall load capacity of the system.
4. Analysis of the Load Capacity of the Cascaded System
4.1. Input Impedance of a Constant Power Load
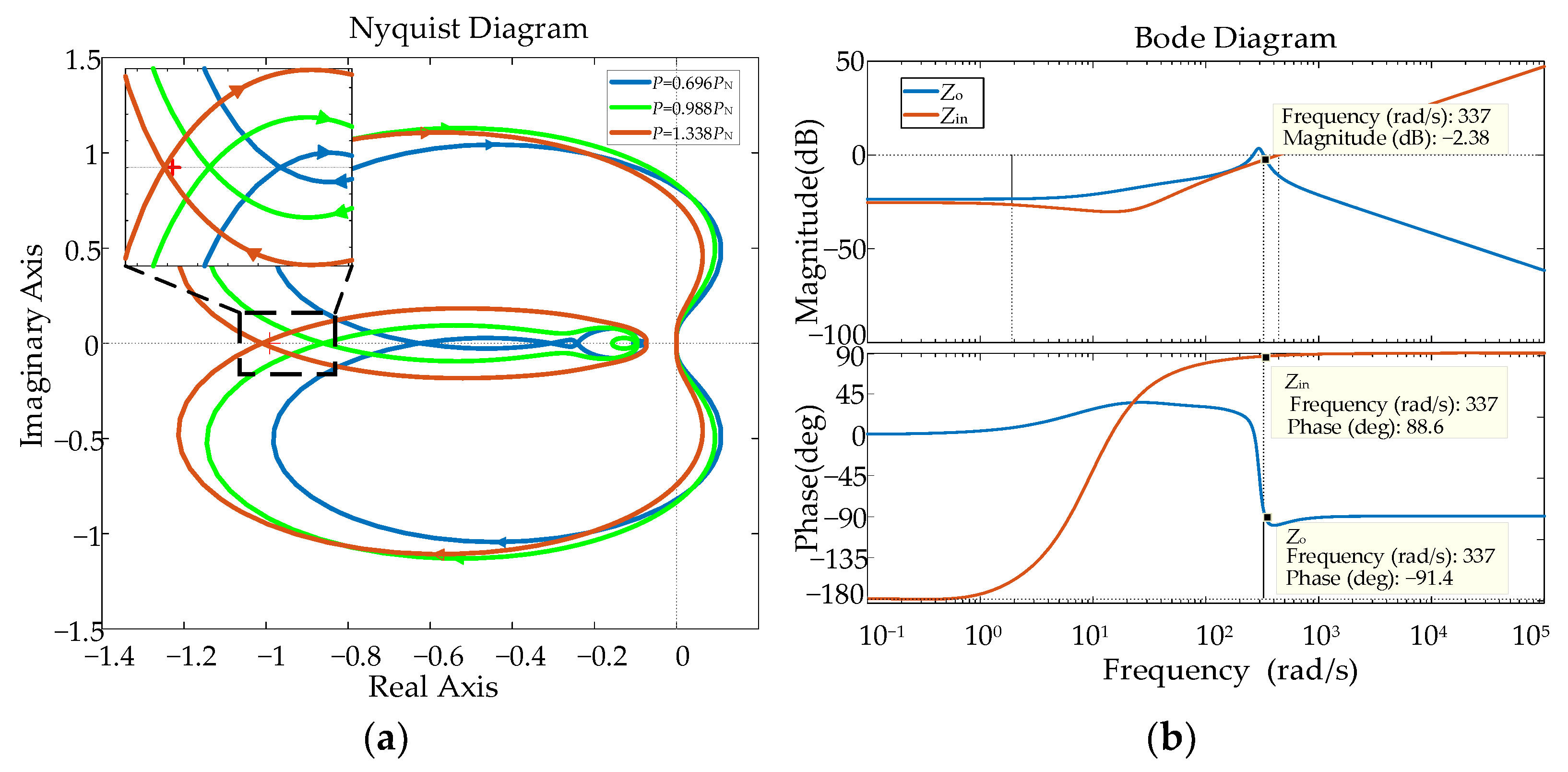
4.2. Analysis of Load Capacity
5. Simulation and Experimental Results
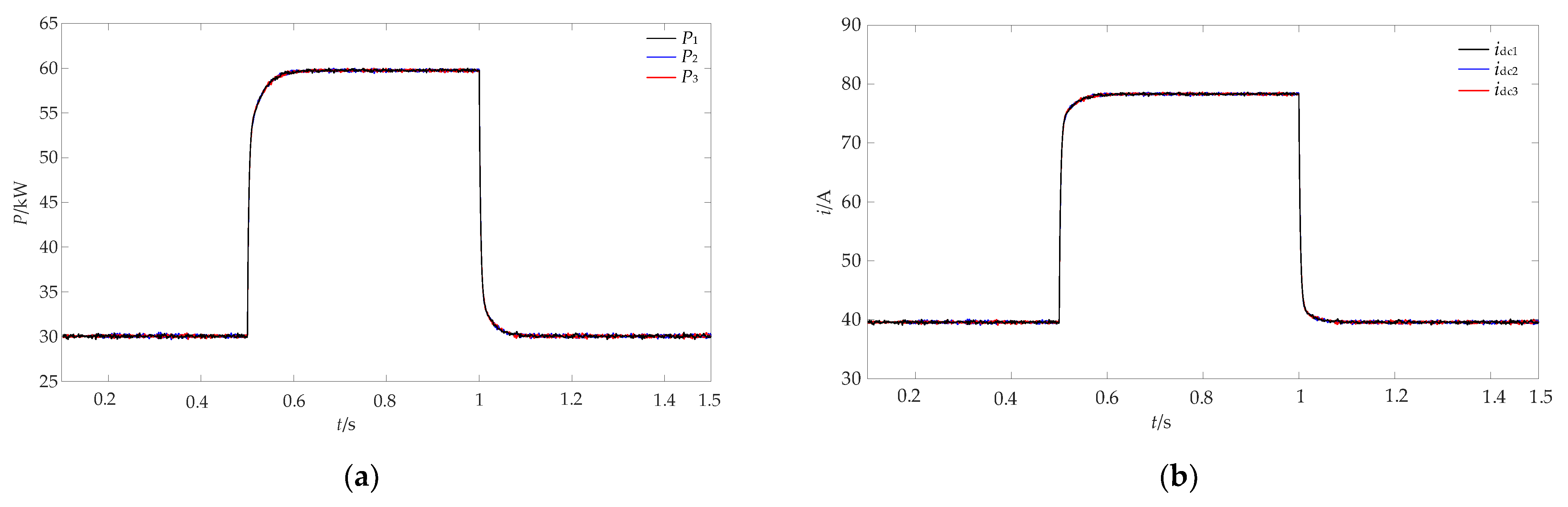
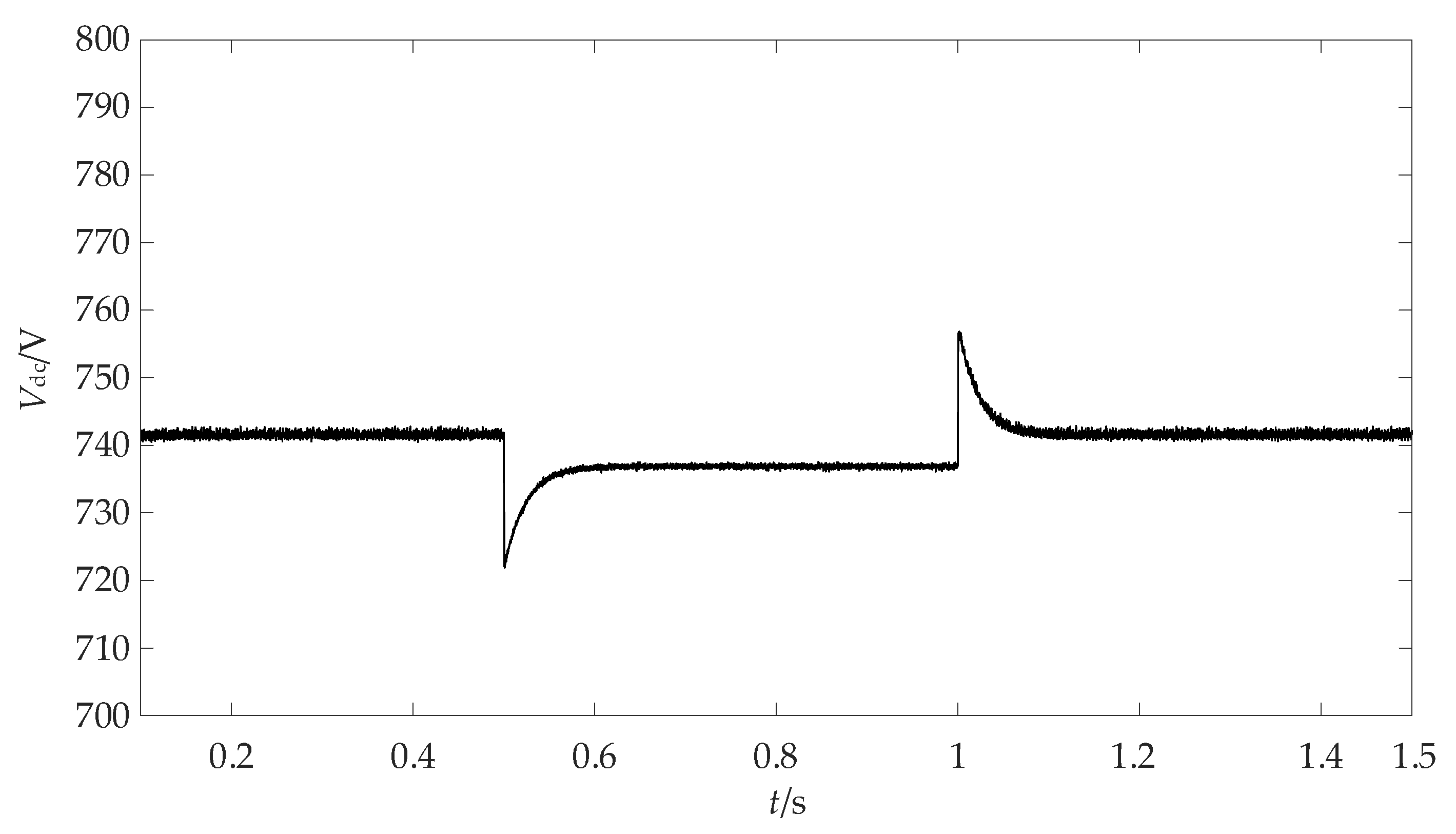
5.1. Simulation Results
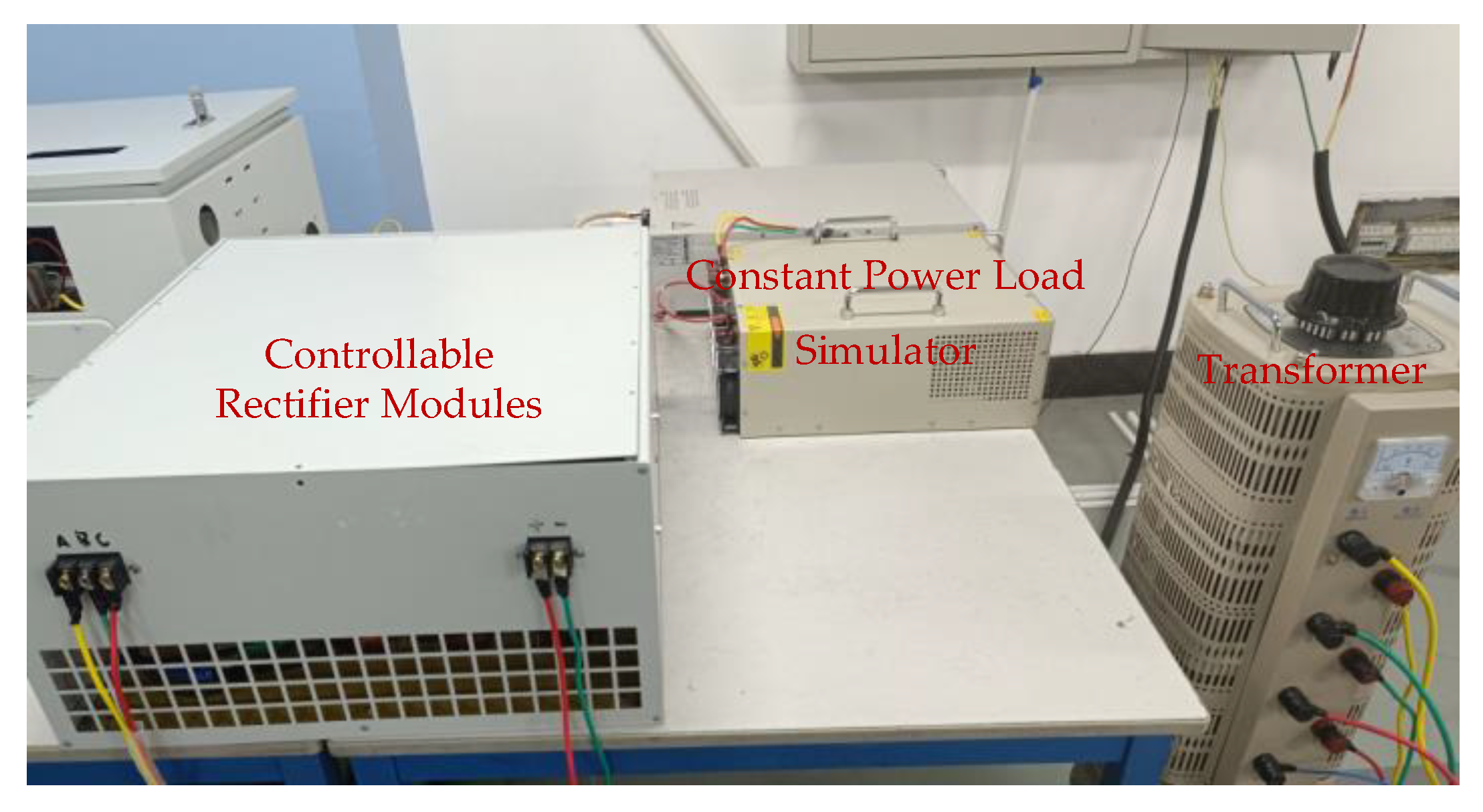
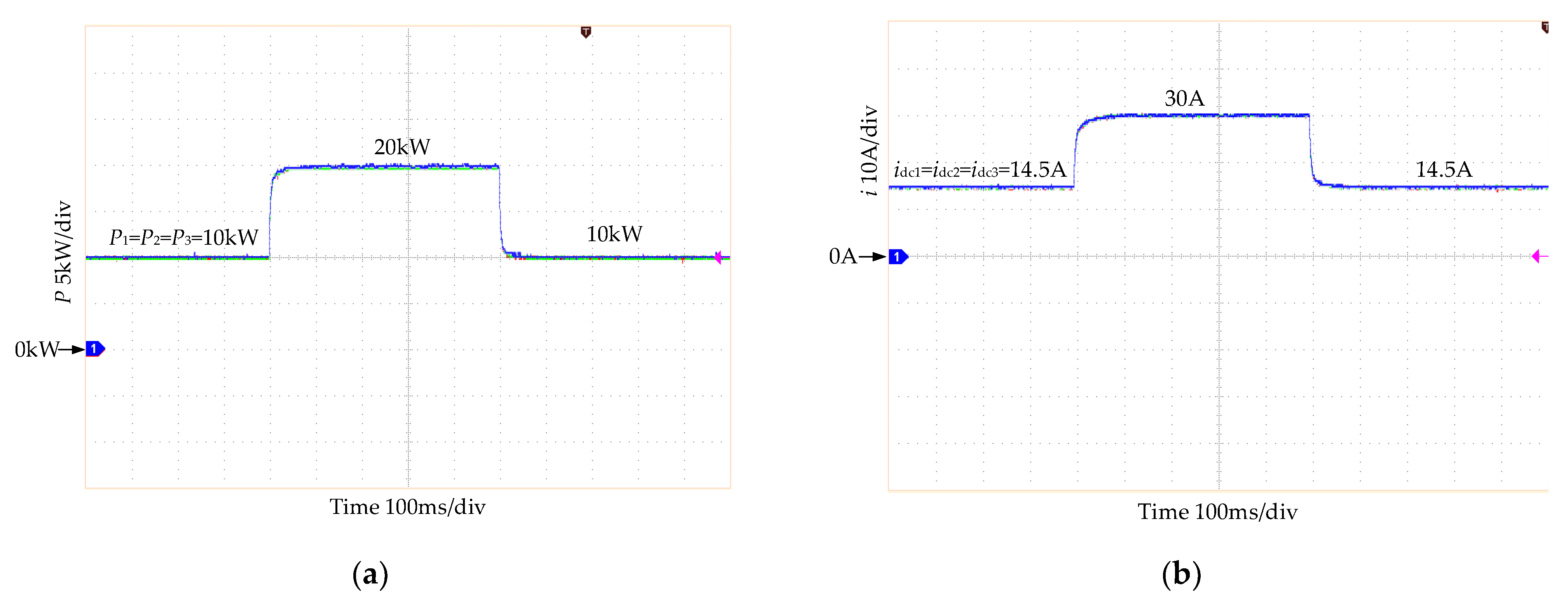
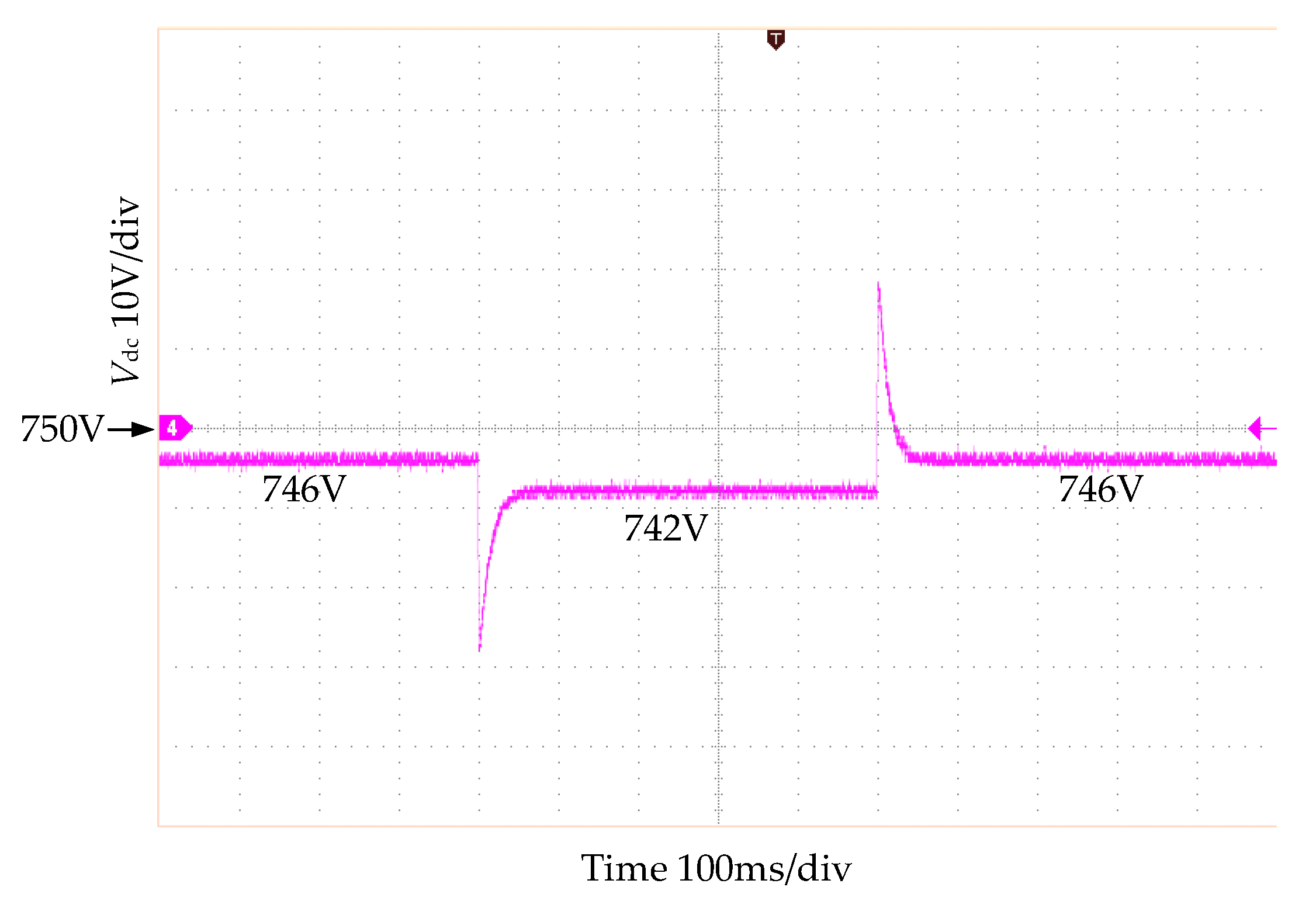
5.2. Experimental Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| EV | Electric Vehicle |
| AC/DC | Alternating Current/Direct Current |
| THD | Total Harmonic Distortion |
| PFC | Power Factor Correction |
| DAB | Dual Active Bridge |
| ZVS | Zero-Voltage Switching |
| IPQR | Improved Proportional Quasi-Resonant |
| PI | Proportional Integral |
References
- Tran, V.T.; Sutanto, D.; Muttaqi, K. The state of the art of battery charging infrastructure for electrical vehicles: Topologies, power controlstrategies, and future trend. In Proceedings of the Australasian Universities Power Engineering Conference, Melbourne, Australia, 19–22 November 2017. [Google Scholar]
- Erb, D.C.; Onar, O.C.; Khaligh, A. Bi-directional charging topologies for plug-in hybrid electric vehicles. In Proceedings of the IEEE Applied Power Electronics Conference & Exposition, Palm Springs, CA, USA, 21–25 February 2010. [Google Scholar]
- Du, S.; Lukic, S.; Jacobson, B.; Huang, A. Review of high power isolated bi-directional DC–DC converters for PHEV/EV DC charging infrastructure. In Proceedings of the IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, USA, 10–14 October 2021. [Google Scholar]
- Vahedi, H.; Al-Haddad, K. A novel multilevel multioutput bidirectional active buck PFC rectifier. IEEE Trans. Ind. Electron. 2016, 63, 5442–5450. [Google Scholar] [CrossRef]
- Chen, Q.; Xu, J.; Wang, L.; Huang, R.; Ma, H. Analysis and improvement of the effect of distributed parasitic capacitance on high-frequency high-density three-phase buck rectifier. IEEE Trans. Power Electron. 2021, 36, 6415–6428. [Google Scholar] [CrossRef]
- Zhang, B.; Xie, S.; Li, Z. An optimized singlestage isolated Swiss-type AC/DC converter based on single full-bridge with midpoint-clamper. IEEE Trans. Power Electron. 2021, 36, 11288–11297. [Google Scholar] [CrossRef]
- Singh, A.K.; Jeyasankar, E.; Das, P. A matrix-based nonisolated three-phase AC–DC rectifier with large step-down voltage gain. IEEE Trans. Power Electron. 2017, 32, 4796–4811. [Google Scholar] [CrossRef]
- Ahmed, M.A.; Dasika, J.D. Interleaved Swiss rectiers for fast EV/PHEV battery chargers. In Proceedings of the IEEE Applied Power Electronics Conference & Exposition, Shanghai, China, 16–20 April 2014. [Google Scholar]
- Gowthamraj, R.; Aravind, C.V.; Prakash, O.K.S. Modeling of Vienna rectifier with PFC controller for electric vehicle charging stations. In Proceedings of the International Engineering Research Conference, Selangor Darul Ehsan, Malaysia, 3–4 July 2019. [Google Scholar]
- Zhang, L. A modified DPWM with neutral point voltage balance capability for three-phase Vienna rectifiers. IEEE Trans. Power Electron. 2021, 36, 263–273. [Google Scholar] [CrossRef]
- He, P.; Khaligh, A. Comprehensive analyses and comparison of 1 kW isolated DC–DC converters for bidirectional EV charging systems. IEEE Trans. Transp. Electrif. 2017, 3, 147–156. [Google Scholar] [CrossRef]
- Xuan, Y.; Yang, X.; Chen, W. A novel three-level CLLC resonant DC–DC converter for bidirectional EV charger in DC microgrids. IEEE Trans. Ind. Electron. 2021, 68, 2334–2344. [Google Scholar] [CrossRef]
- Yaqoob, M.; Loo, K.H.; Lai, Y.M. A four-degrees-of-freedom modulation strategy for dual-active-bridge series-resonant converter designed for total loss minimization. IEEE Trans. Power Electron. 2019, 34, 1065–1081. [Google Scholar] [CrossRef]
- Muthuraj, S.S.; Kanakesh, V.K.; Das, P. Triple phase shift control of an LLL tank based bidirectional dual active bridge converter. IEEE Trans. Power Electron. 2017, 32, 8035–8053. [Google Scholar] [CrossRef]
- Brand, M.J.; Hofmann, M.H.; Schuster, S.F. The influence of current ripples on the lifetime of lithium-ion batteries. IEEE Trans. Veh. Technol. 2018, 67, 10438–10445. [Google Scholar] [CrossRef]
- Zhang, M.; Yuan, Y.; Sun, X. Harmonic Resonance Suppression Strategy of the Front-End Vienna Rectifier in EV Charging Piles. IEEE Trans. Power Electron. 2022, 38, 1036–1053. [Google Scholar] [CrossRef]
- Wang, P.; Bi, Y.; Gao, F. An Improved Deadbeat Control Method for Single-Phase PWM Rectifiers in Charging System for EVs. IEEE Trans. Veh. Technol. 2019, 68, 9672–9681. [Google Scholar] [CrossRef]
- Song, T.; Wang, P.; Zhang, Y. Suppression Method of Current Harmonic for Three-Phase PWM Rectifier in EV Charging System. IEEE Trans. Veh. Technol. 2020, 69, 9634–9642. [Google Scholar] [CrossRef]
- Balasundar, C.; Sundarabalan, C.K.; Srinath, N.S. Interval Type2 Fuzzy Logic-Based Power Sharing Strategy for Hybrid Energy Storage System in Solar Powered Charging Station. IEEE Trans. Veh. Technol. 2021, 70, 12450–12461. [Google Scholar]
- Yan, D.; Chen, Y. A Distributed Online Algorithm for Promoting Energy Sharing between EV Charging Stations. IEEE Trans. Smart Grid 2023, 14, 1158–1172. [Google Scholar] [CrossRef]
- Zheng, Y.; Song, Y.; Hill, D.J. Online Distributed MPC-Based Optimal Scheduling for EV Charging Stations in Distribution Systems. IEEE Trans. Ind. Inform. 2019, 15, 638–649. [Google Scholar] [CrossRef]
- Yan, Q.; Zhang, B.; Kezunovic, M. Optimized Operational Cost Reduction for an EV Charging Station Integrated with Battery Energy Storage and PV Generation. IEEE Trans. Smart Grid 2019, 10, 2096–2106. [Google Scholar] [CrossRef]
- Sharma, J.S.; Guerrero, J.M. Effect of Fault Ride Through Capability on Electric Vehicle Charging Station Under Critical Voltage Conditions. IEEE Trans. Transp. Electrif. 2022, 8, 2469–2478. [Google Scholar]
- Lenka, R.K.; Panda, A.K.; Patel, R. PV Integrated Multifunctional Off-Board EV Charger with Improved Grid Power Quality. IEEE Trans. Ind. Appl. 2022, 58, 5520–5532. [Google Scholar] [CrossRef]
- Engel, J.; Schmitt, T.; Rodemann, T. Hierarchical Economic Model Predictive Control Approach for a Building Energy Management System with Scenario-Driven EV Charging. IEEE Trans. Smart Grid 2022, 13, 3082–3093. [Google Scholar] [CrossRef]
- Kriukov, A.; Gavrilas, M.; Ivanov, O. Novel Decentralized Voltage-Centered EV Charging Control Algorithm Using DSRC System in Low Voltage Distribution Networks. IEEE Access 2021, 9, 164779–164800. [Google Scholar] [CrossRef]
- Cittanti, D.; Gregorio, M.; Vico, E. High-Performance Digital Multiloop Control of LLC Resonant Converters for EV Fast Charging with LUT-Based Feedforward and Adaptive Gain. IEEE Trans. Ind. Appl. 2022, 58, 6266–6285. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| kii = 100 | ||||||
| kpi | Gain Margin (dB) | Phase Margin (deg) | Bandwidth(kHz) | Overshoot (%) | Response Time | Steady-State Error |
| 0.01 | −9.85 | −9.93 | 0.14 | unstable | unstable | unstable |
| 0.1 | Inf | 26.1 | 0.15 | 5 | 0.06 | 7.8 × 10−4 |
| 1 | Inf | 83.5 | 0.66 | 0.22 | 0.05 | 1.8 × 10−3 |
| 3.5 | Inf | 88.5 | 2.28 | 0 | 6 × 10−4 | 1.5 × 10−3 |
| 7 | Inf | 89.3 | 4.55 | 0 | 3 × 10−4 | 6.4 × 10−3 |
| kpi = 3.5 | ||||||
| kii | Gain margin (dB) | Phase margin (deg) | Bandwidth(kHz) | Overshoot (%) | Response time | Steady-state error |
| 1 | Inf | 88.7 | 2.28 | 0 | 6 × 10−4 | 5.5 × 10−3 |
| 10 | Inf | 88.6 | 2.28 | 0 | 6 × 10−4 | 5.7 × 10−3 |
| 100 | Inf | 88.5 | 2.28 | 1 | 6 × 10−4 | 1.5 × 10−3 |
| 300 | Inf | 88.2 | 2.28 | 1.5 | 4 × 10−3 | 3.9 × 10−2 |
| 1000 | Inf | 87 | 2.28 | 3.2 | 0.012 | 6 × 10−4 |
| kiu = 150 | ||||||
| kpu | Gain Margin (dB) | Phase Margin (deg) | Bandwidth (Hz) | Overshoot (%) | Response Time (s) | Steady-State Error |
| 0.1 | 18.1 | 75.2 | 14.5 | 0 | 0.07 | 5.2 × 10−3 |
| 1 | 17.4 | 96.4 | 17.8 | 0 | 0.09 | 5.2 × 10−4 |
| 1.7 | 13.7 | 112 | 42.7 | 0 | 0.14 | 4 × 10−4 |
| 3 | 9.23 | 71.6 | 86.1 | 0 | 0.16 | 1 × 10−3 |
| 7 | 2.21 | 12.9 | 152.7 | 46.5 | 0.35 | 5 × 10−4 |
| 10 | −0.816 | −4.54 | 192.7 | unstable | unstable | unstable |
| kpu = 1.7 | ||||||
| kiu | Gain margin (dB) | Phase margin (deg) | Bandwidth (Hz) | Overshoot (%) | Response time (s) | Steady-state error |
| 10 | 14.7 | 137 | 27.7 | 0 | 2.5 | 1.15 × 10−3 |
| 100 | 14.1 | 120 | 37.4 | 0 | 0.25 | 3.5 × 10−4 |
| 150 | 13.7 | 112 | 42.7 | 0 | 0.14 | 4 × 10−4 |
| 300 | 12.4 | 89.4 | 51.6 | 0 | 0.06 | 2.1 × 10−3 |
| 1000 | 4.24 | 20.9 | 77.5 | 54.3 | 0.1 | 1.3 × 10−3 |
| Each Rectifier Module Parameters | Value |
|---|---|
| RMS value of grid line voltage Vg/V | 380 |
| Filter inductor Ls/mH | 0.3 |
| DC side capacitance C/mF | 1 |
| Inductors connected in parallel L/mH | 1 |
| The internal resistance of the inductance connected in parallel R/Ω | 0.001 |
| Current loop PI controller parameters/kpi, kii | 3.5, 100 |
| Voltage loop PI controller parameters/kpu, kiu | 1.7, 150 |
| Rated power PN/kW | 60 |
| Virtual impedance Zv/Ω | 0.2 |
| Reference value of DC bus voltage Vdc*/V | 750 |
| Buck converter parameters | Value |
| Filter inductor LL/mH | 3.33 |
| Filter inductor internal resistance rL/Ω | 0.001 |
| Load side capacitance CL/mF | 0.2 |
| Reference value of load voltage UL*/V | 500 |
| Voltage loop PI controller parameters/kpuL, kiuL | 0.0005, 0.4 |
| Each Rectifier Module Parameter | Value |
|---|---|
| RMS value of grid line voltage Vg/V | 380 |
| Filter inductor Ls/mH | 0.5 |
| DC side capacitance C/mF | 2 |
| Inductors connected in parallel L/mH | 0.5 |
| The internal resistance of the inductance connected in parallel R/Ω | 0.02 |
| Current loop PI controller parameters/kpi, kii | 3, 200 |
| Voltage loop PI controller parameters/kpu, kiu | 1, 100 |
| Rated power PN/kW | 20 |
| Virtual impedance Zv/Ω | 0.1 |
| Reference value of DC bus voltage Vdc*/V | 750 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, Z.-X.; Cao, J.-N.; Zhu, H.-C.; Li, P.; Xue, H.-F.; Zheng, G.-X.; Jia, J.-W. Parallel Power Sharing Control of Multi-Controllable Rectifiers in a High-Power DC Fast Charging Station. World Electr. Veh. J. 2023, 14, 193. https://doi.org/10.3390/wevj14070193
Xiao Z-X, Cao J-N, Zhu H-C, Li P, Xue H-F, Zheng G-X, Jia J-W. Parallel Power Sharing Control of Multi-Controllable Rectifiers in a High-Power DC Fast Charging Station. World Electric Vehicle Journal. 2023; 14(7):193. https://doi.org/10.3390/wevj14070193
Chicago/Turabian StyleXiao, Zhao-Xia, Jia-Ning Cao, Hong-Chi Zhu, Pan Li, Hao-Fei Xue, Guo-Xi Zheng, and Jiang-Wei Jia. 2023. "Parallel Power Sharing Control of Multi-Controllable Rectifiers in a High-Power DC Fast Charging Station" World Electric Vehicle Journal 14, no. 7: 193. https://doi.org/10.3390/wevj14070193
APA StyleXiao, Z.-X., Cao, J.-N., Zhu, H.-C., Li, P., Xue, H.-F., Zheng, G.-X., & Jia, J.-W. (2023). Parallel Power Sharing Control of Multi-Controllable Rectifiers in a High-Power DC Fast Charging Station. World Electric Vehicle Journal, 14(7), 193. https://doi.org/10.3390/wevj14070193