
Effect of Directional Auditory Takeover Request on Takeover Behavior and Eye Movement in Conditionally Automated Driving

Abstract
1. Introduction
1.1. General Overview
1.2. Visual, Auditory and Vibrotactile TORs
1.3. Analysis of Auditory TOR and Directionality
2. Materials and Methods
2.1. Participants
2.2. Experimental Equipment
2.3. Conditional Automation Driving Simulation Scenarios
- (1)
- Intersection: 5000 m long with 6 lanes in both directions; each lane was 3.5 m wide. Before the takeover request was issued, the CAD system was driving at a constant speed of 50 km/h in the middle lane. The takeover scenario is shown below. The vehicle was about to enter an intersection when it detected a traffic accident ahead. The CAD system approached boundary conditions. At the same time, a two-wheeler with a speed of 15 km/h appeared at the left front/right front intersection with a distance of 30 m, moving in a direction perpendicular to the experiment vehicle’s travel direction. It was considered a potential danger and an auditory TOR was issued;
- (2)
- Curve: 5000 m long with a radius of curvature of 500 m; 2 lanes in the same direction; each lane was 3.5 m wide. Before the takeover request was issued, the vehicle was driving at a constant speed of 50 km/h in the current lane. The takeover scenario is shown below. The CAD system detected a traffic accident ahead and approached boundary conditions. At the same time, a vehicle with a distance of 30 m in the adjacent lane was rapidly approaching and overtaking at a speed of 80 km/h. It was considered a potential danger and an auditory TOR was issued.
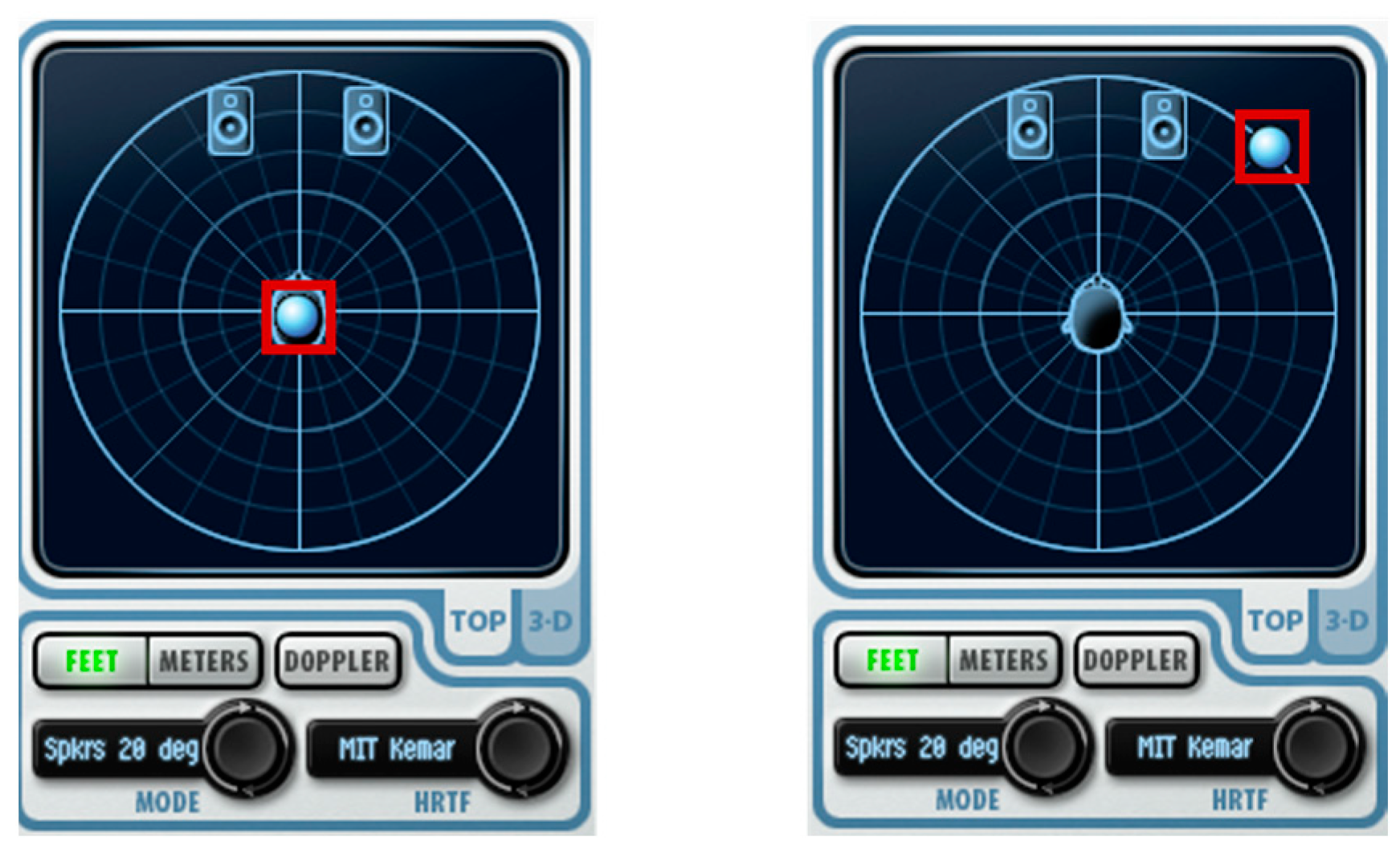
2.4. Auditory TORs Design
2.5. Non-Driving Related Tasks
2.6. Experimental Design and Procedure
2.7. Dependent Variables
- (1)
- Collision rate (%): the proportion of participants failing to takeover properly and colliding with potential hazards or the traffic accident;
- (2)
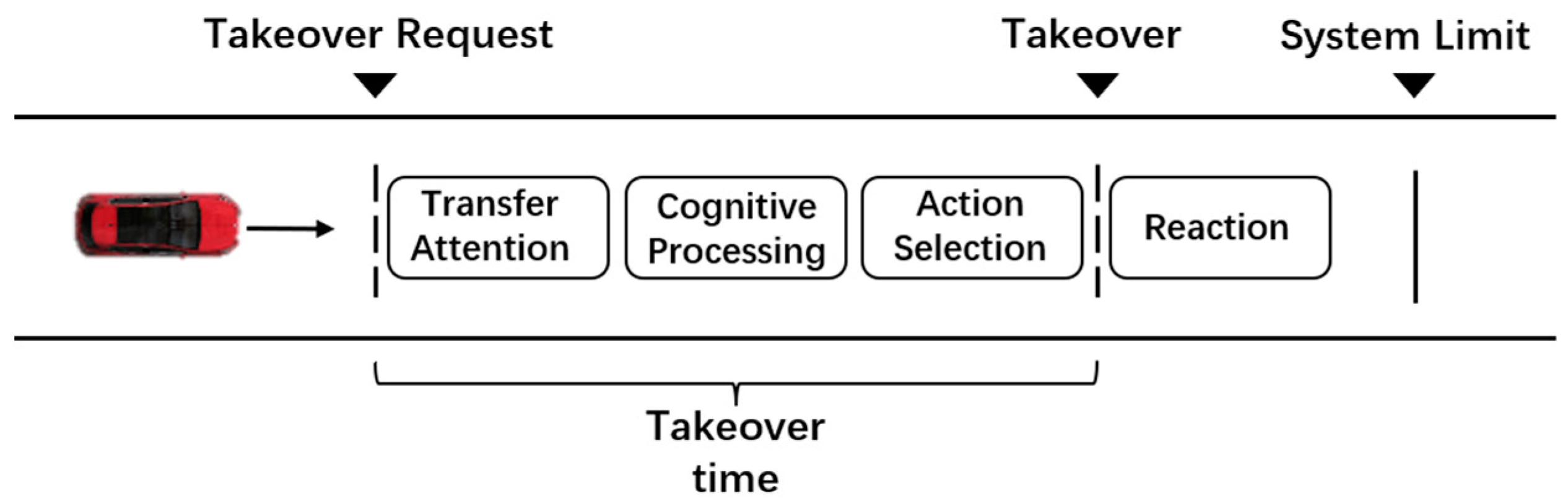
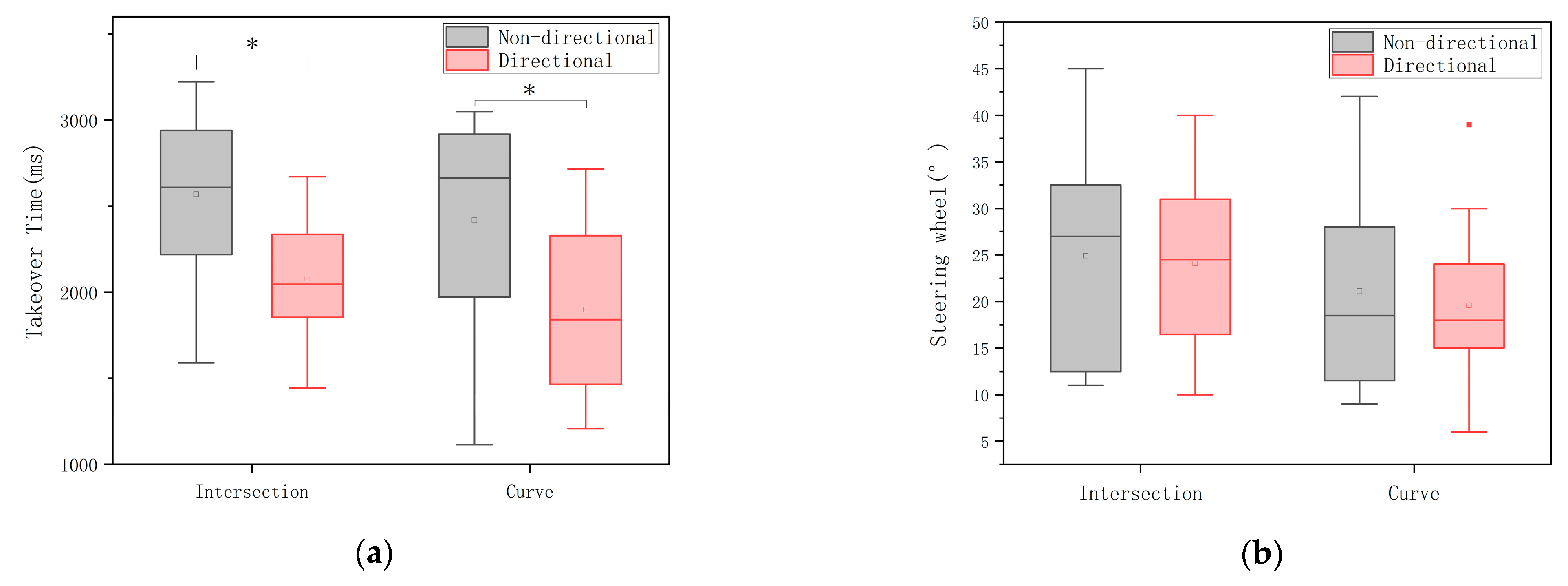
- Takeover time (ms): the time from the start of the TOR to the participant reengaging control of the vehicle. In this study, we defined reengaging control of the vehicle as the steering wheel angle greater than 2 deg or pedal depression greater than 10%;
- (3)
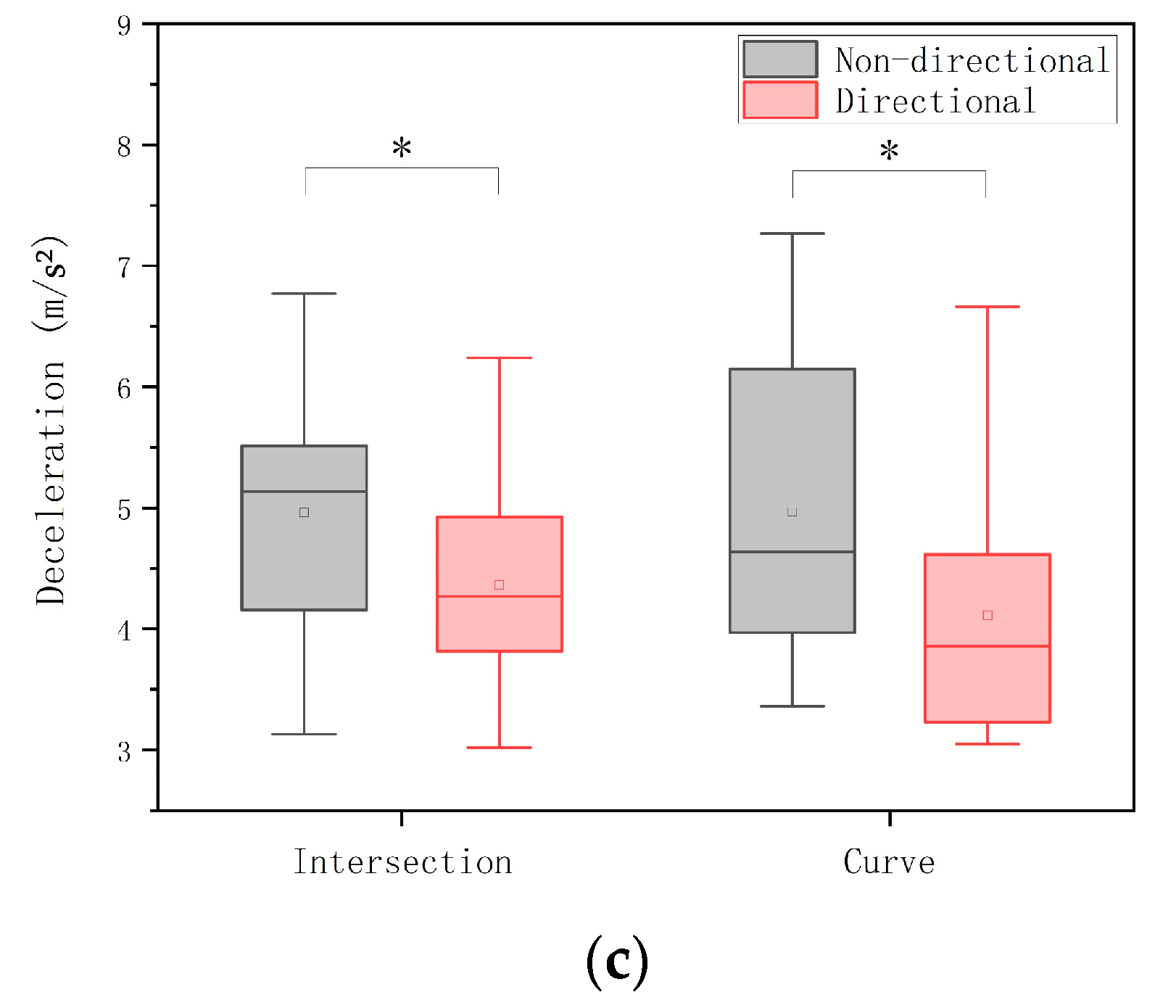
- Deceleration (m/s2): maximum longitudinal acceleration during the takeover, which is measured from the time when the TOR is issued to the time when the accident is avoided, or collisions occur;
- (4)
- Steering wheel angle (°): maximum steering wheel angle during the takeover, which is measured from the time when the TOR is issued to the time when the accident is avoided, or collisions occur;
- (5)
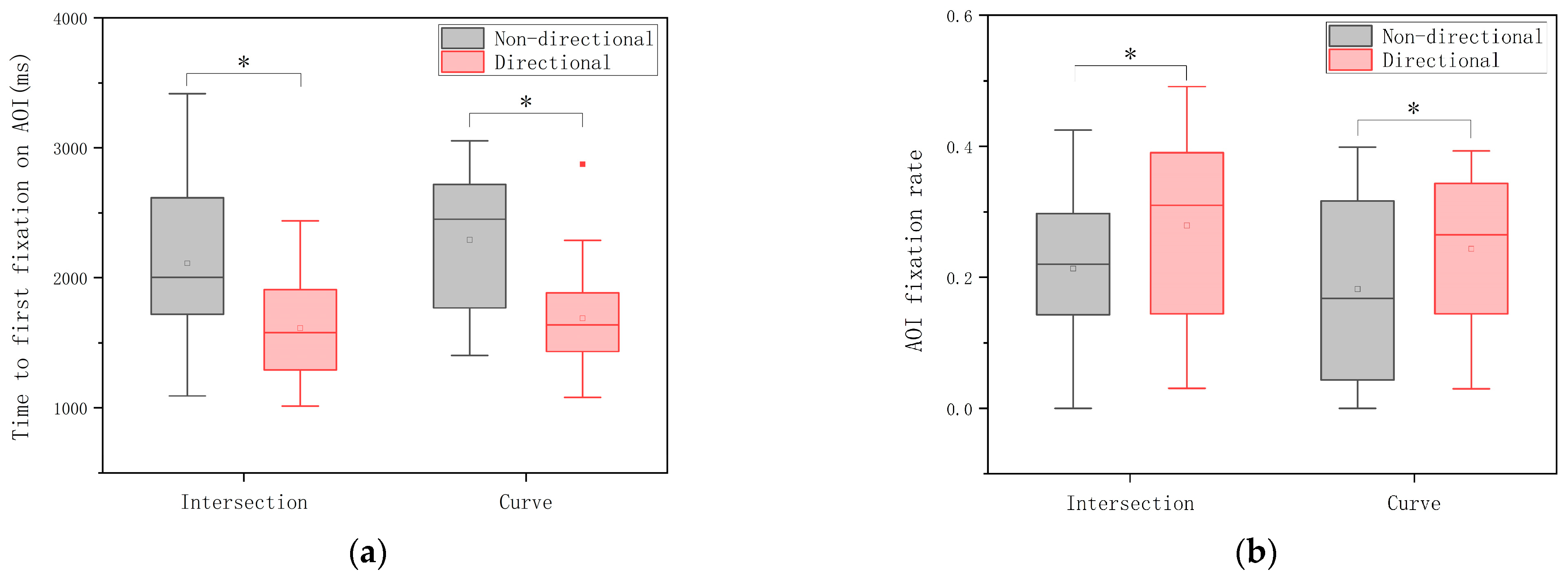
- Time to the first fixation on the area of interest (AOI) (ms): in this study, the AOI refers to the area where the potential hazard is located after TORs, such as the right rearview mirror, left rearview mirror, front left view, and front right view. The time between the start of the TOR and the participant’s first fixation at the AOI is the time to the first fixation on the AOI;
- (6)
- AOI fixation rate (%): the proportion of the time fixations which are in the AOI to the total duration of fixation;
- (7)
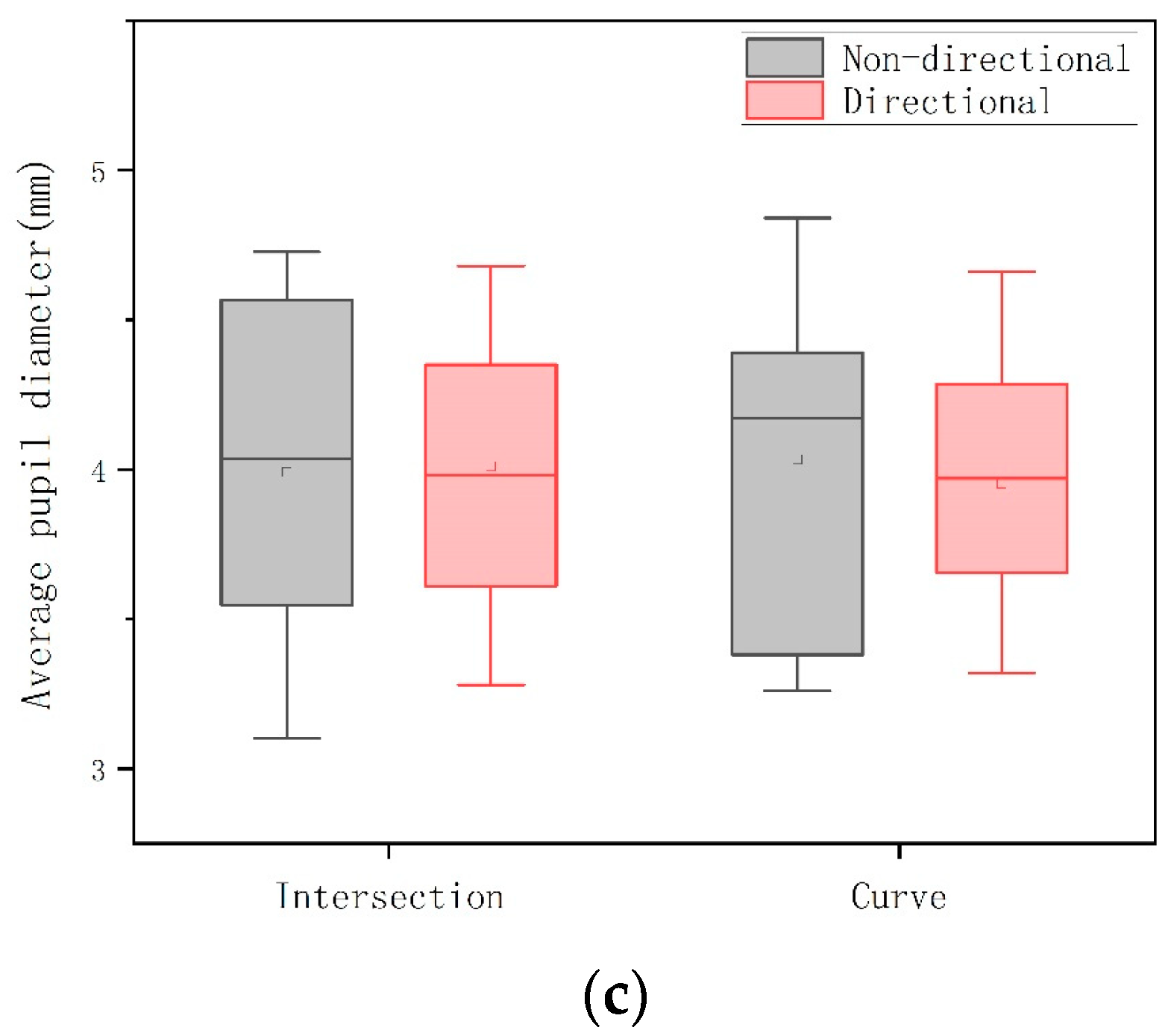
- Average pupil diameter (mm): pupil diameter of participants during the period from the start of TOR to the participant’s response;
2.8. Statistical Analyses
3. Results
3.1. Eye Movement
3.1.1. Time to the First Fixation on AOI
3.1.2. AOI Fixation Rate
3.1.3. Average Pupil Diameter
3.2. Takeover Behavior
3.2.1. Collision Rate
3.2.2. Takeover Time
3.2.3. Steering Wheel Angle
3.2.4. Deceleration
4. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rossi, R.; Gastaldi, M.; Orsini, F.; De Cet, G.; Meneguzzer, C. A comparative simulator study of reaction times to yellow traffic light under manual and automated driving. Transp. Res. Procedia 2021, 52, 276–283. [Google Scholar] [CrossRef]
- Zeeb, K.; Buchner, A.; Schrauf, M. What determines the take-over time? An integrated model approach of driver take-over after automated driving. Accid. Anal. Prev. 2015, 78, 212–221. [Google Scholar] [CrossRef] [PubMed]
- Kerschbaum, P.; Lorenz, L.; Bengler, K. A transforming steering wheel for highly automated cars. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Republic of Korea, 28 June–1 July 2015; pp. 1287–1292. [Google Scholar]
- Bazilinskyy, P.; Petermeijer, S.M.; Petrovych, V.; Dodou, D.; De Winter, J.C.F. Take-over requests in highly automated driving: A crowdsourcing multimedia survey on auditory, vibrotactile, and visual displays. Transp. Res. Part C 2018, 56, 82–98. [Google Scholar] [CrossRef]
- Stanton, N.A.; Eriksson, A.; Banks, V.A. Transition to manual: Comparing simulator with on-road control transitions. Accid. Anal. Prev. 2017, 102, 227–234. [Google Scholar]
- Brandenburg, S.; Chuang, L. Take-over requests during highly automated driving: How should they be presented and under what conditions? Transp. Res. Part F Traf. Psychol. Behav. 2019, 66, 214–225. [Google Scholar] [CrossRef]
- Löcken, A.; Heuten, W.; Boll, S. Supporting lane change decisions with ambient light. In Proceedings of the 7th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Nottingham, UK, 1–3 September 2015; pp. 204–211. [Google Scholar]
- Ma, S.; Wei, Z.; Shi, J.; Yang, Z. The human factors of the take-over process in conditional automated driving based on cognitive mechanism. Adv. Psychol. Sci. 2019, 28, 150–160. [Google Scholar] [CrossRef]
- Forster, Y.; Naujoks, F.; Neukum, A.; Huestegge, L. Driver compliance to take-over requests with different auditory outputs in conditional automation. Accid. Anal. Prev. 2017, 109, 18–28. [Google Scholar] [CrossRef]
- Bazilinskyy, P.; de Winter, J. Auditory interfaces in automated driving: An international survey. PeerJ Comput. Sci. 2015, 1, e13. [Google Scholar] [CrossRef]
- Naujoks, F.; Mai, C.; Neukum, A. The effect of urgency of take-over requests during highly automated driving under distraction conditions. In Proceedings of the 5th International Conference on Applied Human Factors and Ergonomics AHFE, Krakow, Poland, 19–23 July 2014; pp. 431–438. [Google Scholar]
- Roche, F.; Somieski, A.; Brandenburg, S. Behavioral changes to repeated takeovers in highly automated driving: Effects of the takeover-request design and the nondriving-related task modality. Hum. Factors 2019, 61, 839–849. [Google Scholar] [CrossRef]
- Telpaz, A.; Rhindress, B.; Zelman, I.; Tsimhoni, O. Haptic seat for automated driving: Preparing the driver to take control effectively. In Proceedings of the 7th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Nottingham, UK, 1–3 September 2015; pp. 23–30. [Google Scholar]
- Yoon, S.H.; Kim, Y.W.; Ji, Y.G. The effects of takeover request modalities on highly automated car control transitions. Accid. Anal. Prev. 2019, 123, 150–158. [Google Scholar] [CrossRef]
- Ho, C.; Reed, N.; Spence, C. Multisensory in-car warning signals for collision avoidance. Hum. Factors 2007, 49, 1107–1114. [Google Scholar] [CrossRef] [PubMed]
- Spence, C.; Ho, C. Tactile and multisensory spatial warning signals for drivers. IEEE Trans. Haptics 2008, 1, 121–129. [Google Scholar] [CrossRef] [PubMed]
- Biondi, F.N.; Rossi, R.; Gastaldi, M.; Orsini, F.; Mulatti, C. Precision teaching to improve drivers’ lane maintenance. J. Saf. Res. 2020, 72, 225–229. [Google Scholar] [CrossRef]
- Petermeijer, S.; Bazilinskyy, P.; Bengler, K.; De Winter, J. Take-over again: Investigating multimodal and directional TORs to get the driver back into the loop. Appl. Ergonom. 2017, 62, 204–215. [Google Scholar] [CrossRef]
- Zhang, Y.; Yan, X.; Zhuo, Y. Discrimination of effects between directional and nondirectional information of auditory warning on driving behavior. Discret. Dynam. Nat. Soc. 2015, 2015, 980281. [Google Scholar] [CrossRef]
- Yan, X.; Zhang, Y.; Lu, M. The influence of in-vehicle speech warning timing on drivers’ collision avoidance performance at signalized intersections. Transp. Res. Part C 2015, 51, 231–242. [Google Scholar] [CrossRef]
- Bella, F.; Silvestri, M. Effects of directional auditory and visual warnings at intersections on reaction times and speed reduction times. Transp. Res. Part F Traf. Psychol. Behav. 2017, 51, 88–102. [Google Scholar] [CrossRef]
- Yan, X.; Zhang, X.; Xue, Q. How does intersection field of view influence driving safety in an emergent situation? Accid. Anal. Prev. 2018, 119, 162–175. [Google Scholar] [CrossRef]
- Gold, C.; Happee, R.; Bengler, K. Modeling take-over performance in level 3 conditionally automated vehicles. Accid. Anal. Prev. 2018, 116, 3–13. [Google Scholar] [CrossRef]
- Pfleging, B.; Rang, M.; Broy, N. Investigating user needs for non-driving-related activities during automated driving. In Proceedings of the 15th International Conference on Mobile and Ubiquitous Multimedia, Rovaniemi, Finland, 12–15 December 2016; pp. 91–99. [Google Scholar]
- Zhang, B.; de Winter, J.; Varotto, S.; Happee, R.; Martens, M. Determinants of take-over time from automated driving: A meta-analysis of 129 studies. Transp. Res. Part F Traf. Psychol. Behav. 2019, 64, 285–307. [Google Scholar] [CrossRef]
- Guo, Y.S.; Ma, Y.; Fu, R.; Meng, N.; Yuan, W. Influence of driving experience on gazing behavior characteristic for car driver. J. Traf. Transp. Eng. 2012, 74, 59–61. [Google Scholar]
- Schneider, A.; Sonderegger, A.; Krueger, E.; Meteier, Q.; Chavaillaz, A. The interplay between task difficulty and microsaccade rate: Evidence for the critical role of visual load. J. Eye Mov. Res. 2021, 13. [Google Scholar] [CrossRef] [PubMed]
- Lif, P.; Oskarsson, P.A.; Hedstrm, J.; Andersson, P.; Lindahl, B.; Palm, C. Evaluation of tactile drift displays in helicopter. In Proceedings of the International Conference on Human-Computer Interaction, Heraklion, Crete, Greece, 22–27 June 2014; pp. 578–588. [Google Scholar]
- Ou, Y.K.; Huang, W.X.; Fang, C.W. Effects of different takeover request interfaces on takeover behavior and performance during conditionally automated driving. Accid. Anal. Prev. 2021, 162, 106425. [Google Scholar] [CrossRef] [PubMed]
- Alvarez, I.; Martin, A.; Dunbar, J.; Taiber, J.; Wilson, D.M.; Gilbert, J.E. Designing driver-centric natural voice user interfaces. In Proceedings of the 3rd International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Salzburg, Austria, 30 November–2 December 2011; pp. 42–49. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measure | Statistical Test |
|---|---|
| -Time to the first fixation on AOI | t-test for paired samples |
| -AOI fixation rate | t-test for paired samples |
| -Average pupil diameter | Wilcoxon signed-rank |
| -Collision rate | Fisher’s exact probability test |
| -Takeover time | t-test for paired samples |
| -Deceleration | t-test for paired samples |
| -Steering wheel angle | t-test for paired samples |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, J.; Guo, Y.; Xu, W.; Li, J. Effect of Directional Auditory Takeover Request on Takeover Behavior and Eye Movement in Conditionally Automated Driving. World Electr. Veh. J. 2023, 14, 70. https://doi.org/10.3390/wevj14030070
Ma J, Guo Y, Xu W, Li J. Effect of Directional Auditory Takeover Request on Takeover Behavior and Eye Movement in Conditionally Automated Driving. World Electric Vehicle Journal. 2023; 14(3):70. https://doi.org/10.3390/wevj14030070
Chicago/Turabian StyleMa, Jun, Yixun Guo, Wenxia Xu, and Jiateng Li. 2023. "Effect of Directional Auditory Takeover Request on Takeover Behavior and Eye Movement in Conditionally Automated Driving" World Electric Vehicle Journal 14, no. 3: 70. https://doi.org/10.3390/wevj14030070
APA StyleMa, J., Guo, Y., Xu, W., & Li, J. (2023). Effect of Directional Auditory Takeover Request on Takeover Behavior and Eye Movement in Conditionally Automated Driving. World Electric Vehicle Journal, 14(3), 70. https://doi.org/10.3390/wevj14030070