
Energy-Saving Optimization for Electric Vehicles in Car-Following Scenarios Based on Model Predictive Control



Abstract
:1. Introduction
1.1. Background
1.2. Literature Review
1.3. Original Contributions
- A nonlinear multi-objective model predictive control framework is developed for a FRIDEV under car-following scenarios, in which safety, car-following performance, ride comfort and energy economy are optimized simultaneously;
- The demand power of the host vehicle is used as an indicator to accurately reflect the energy consumption and incorporated in the cost function to achieve enhanced energy economy.
1.4. Outline of the Paper
2. System Modeling
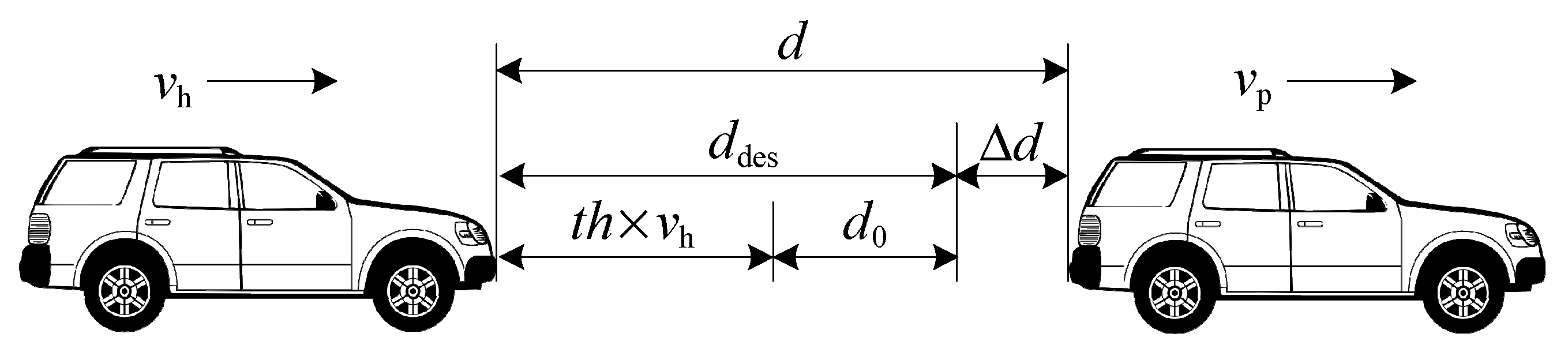
2.1. Vehicle Longitudinal Dynamics
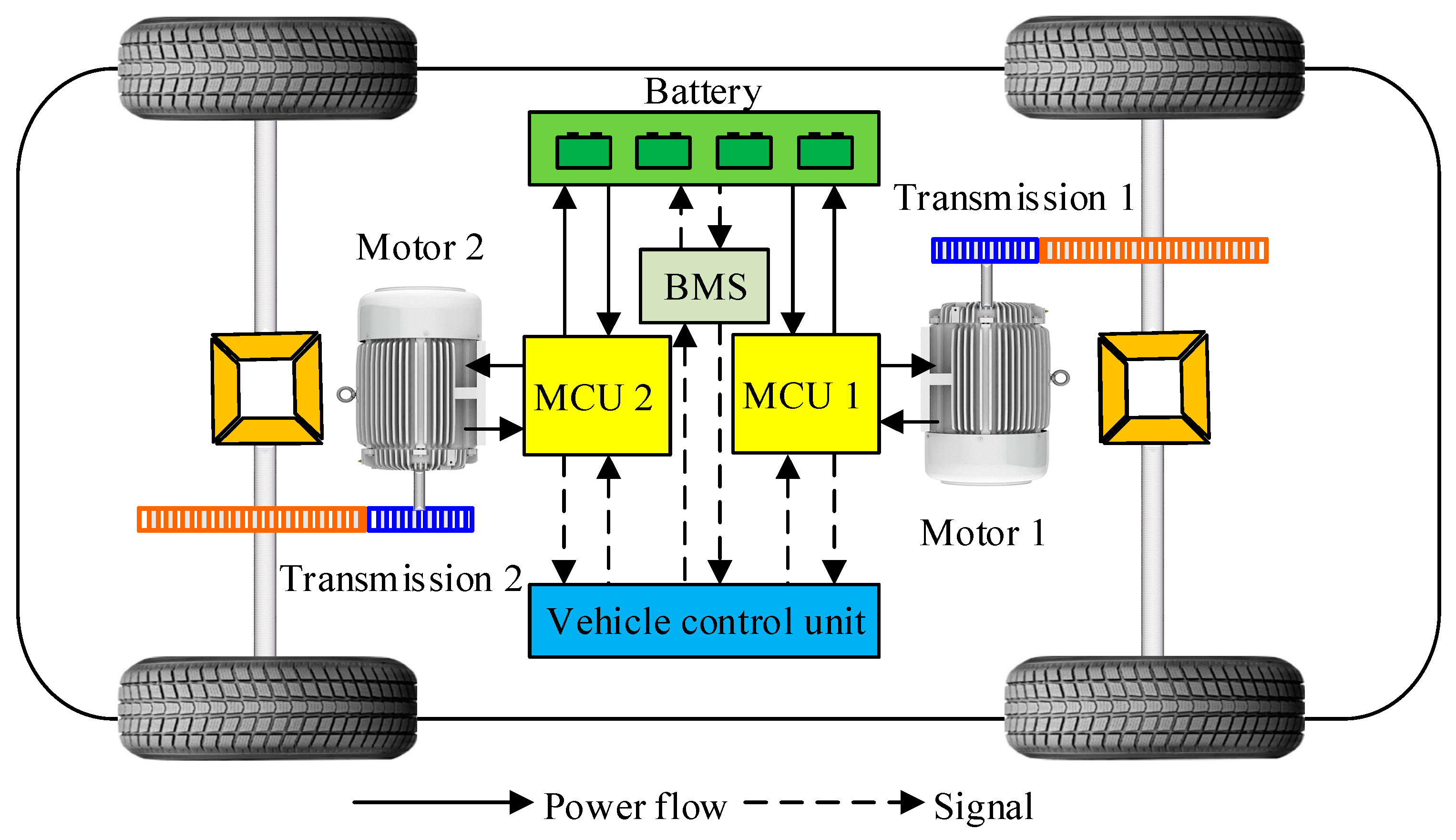
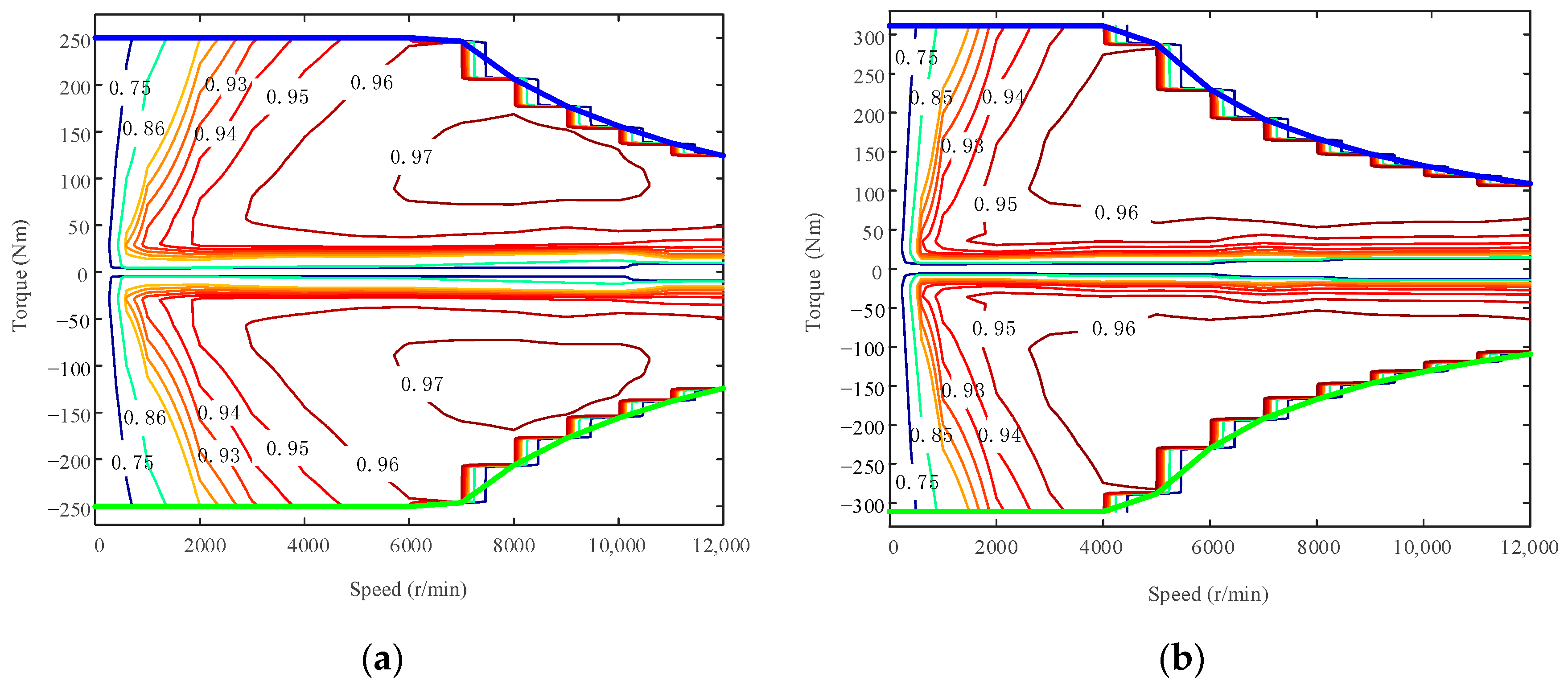
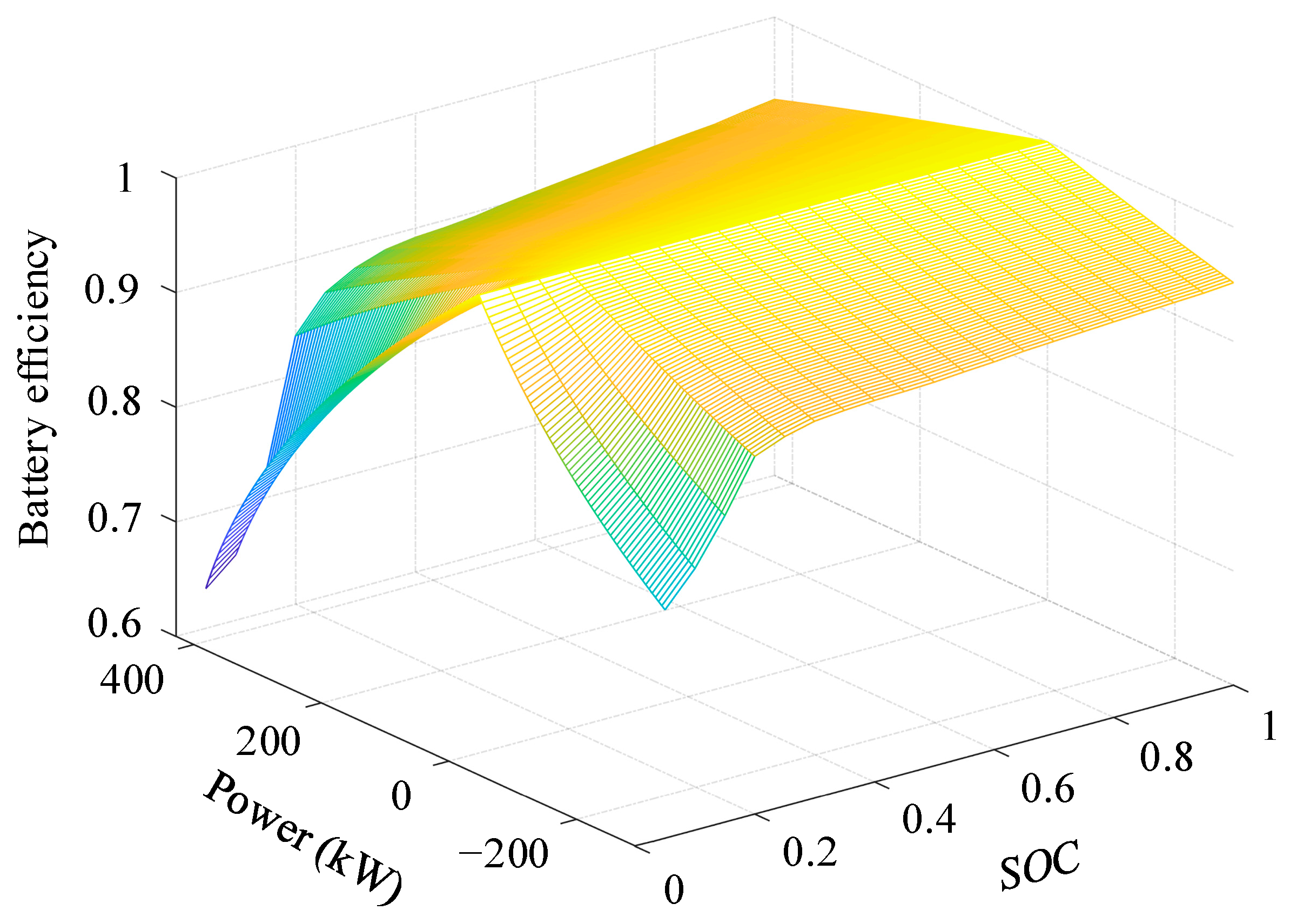
2.2. Electric Drive System
3. Economy-Oriented Car-Following Control Strategy
3.1. Control Objectives
- A.
- Car-following performance
- B.
- Ride comfort
- C.
- Energy consumption
3.2. Overall Cost Function
3.3. Model Predictive Optimization Problem
- The discrete system state Equation (5);
- The constraints (31)–(33).
4. Simulation Results
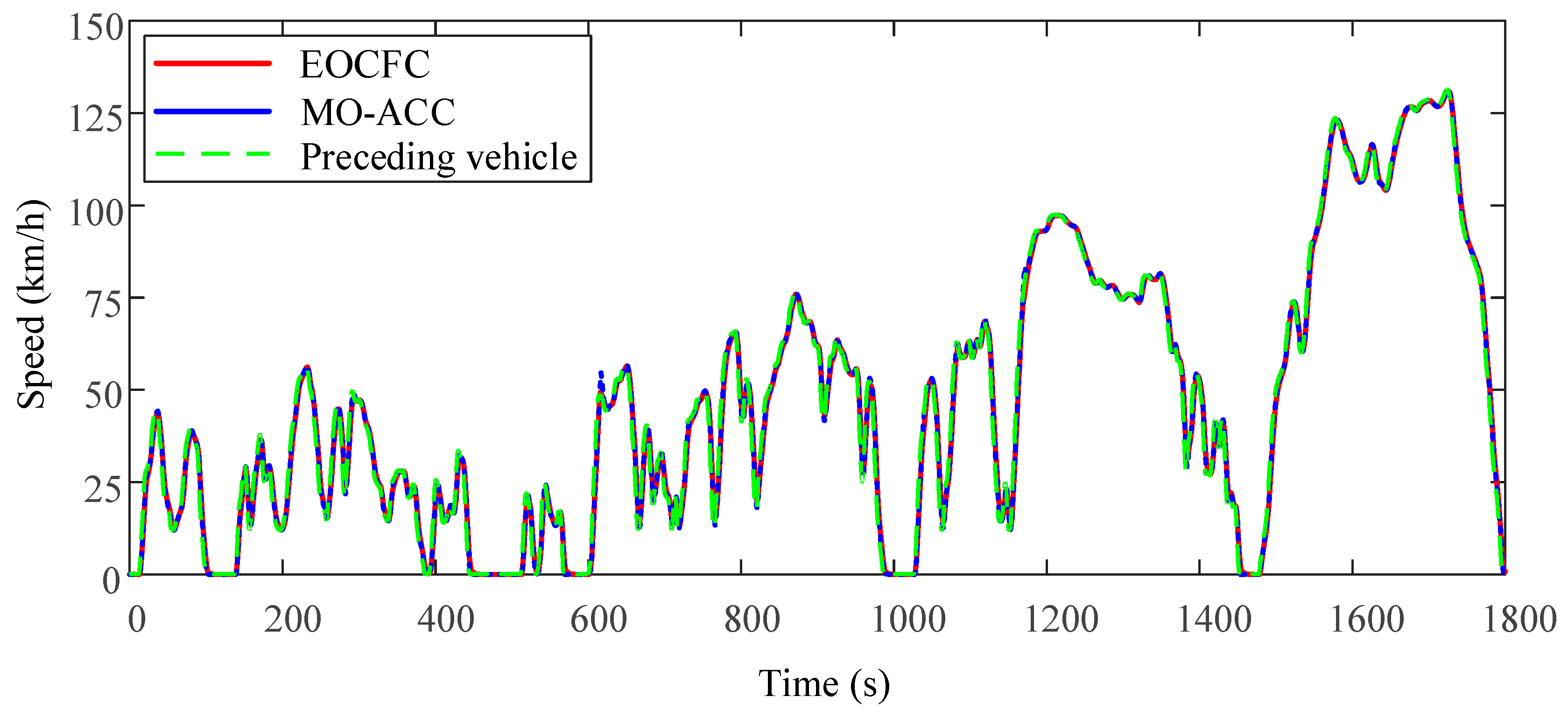
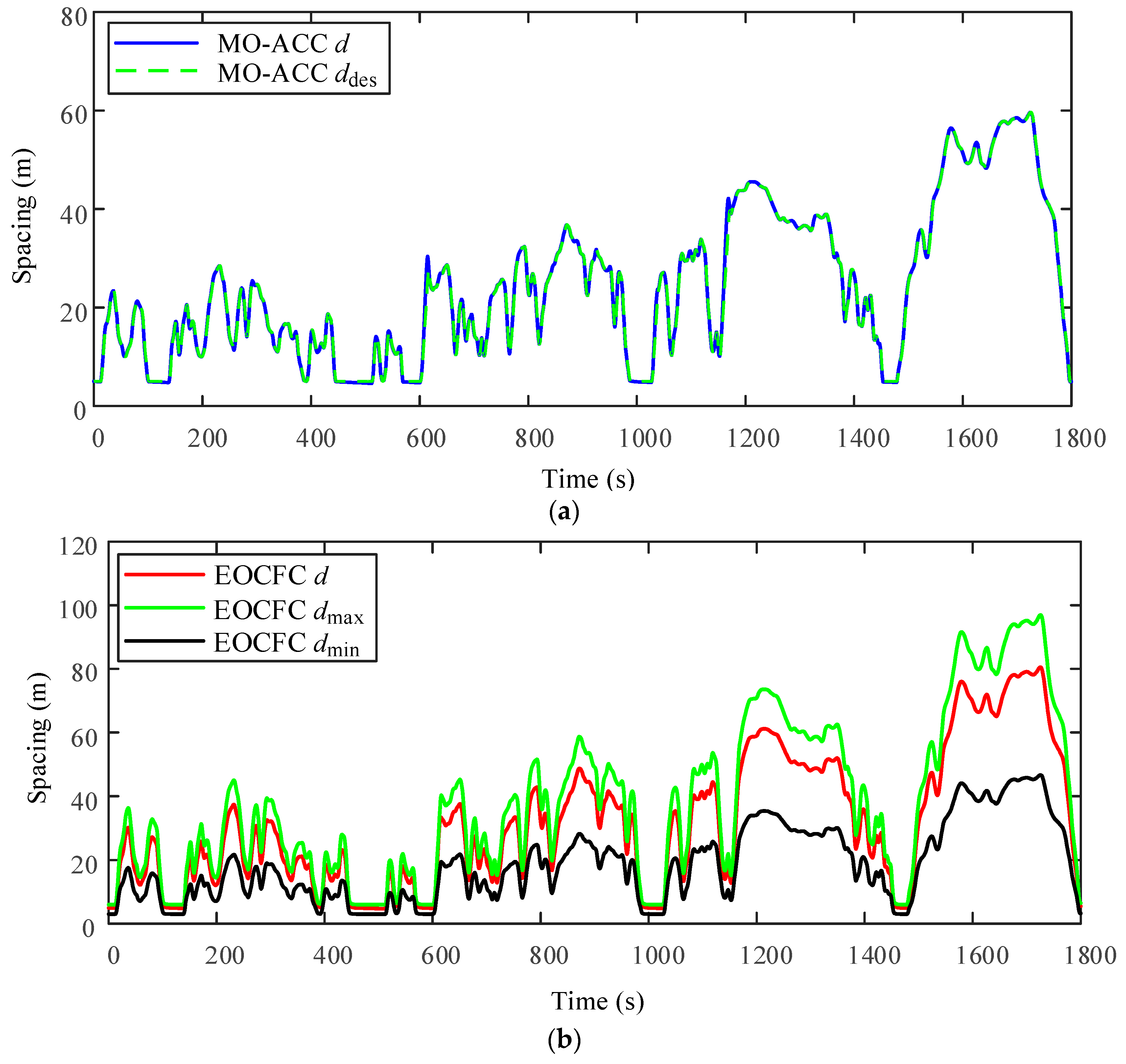
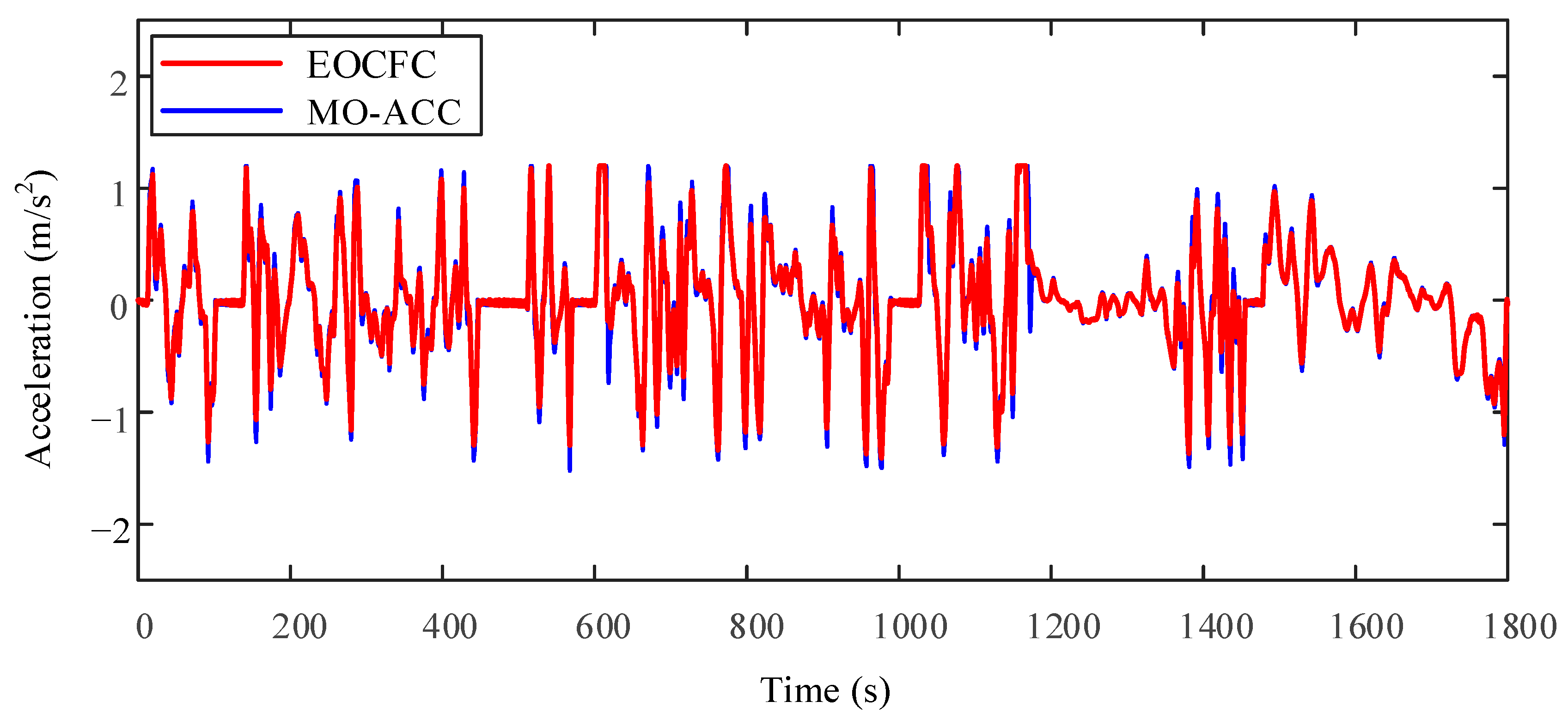
4.1. Car-Following and Ride Comfort Performance
4.2. Energy Economy
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rajashekara, K. Present status and future trends in electric vehicle propulsion technologies. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 3–10. [Google Scholar] [CrossRef]
- Mutoh, N. Front-and-rear-wheel-independent-drive-type electric vehicle (FRID EV) with compatible driving performance and safety. World Electr. Veh. J. 2009, 3, 17–26. [Google Scholar] [CrossRef]
- Barkenbus, J.N. Eco-driving: An overlooked climate change initiative. Energy Policy 2010, 38, 762–769. [Google Scholar] [CrossRef]
- Kamal, M.; Mukai, M.; Murata, J.; Kawabe, T. Ecological driver assistance system using model-based anticipation of vehicle–road–traffic information. IET Intell. Transp. Syst. 2010, 4, 244–251. [Google Scholar] [CrossRef]
- Guo, C.; Fu, C.; Luo, R.; Yang, G. Energy-oriented car-following control for a front-and rear-independent-drive electric vehicle platoon. Energy 2022, 257, 124732. [Google Scholar] [CrossRef]
- Li, S.; Xu, S.; Wang, W.; Cheng, B. Overview of ecological driving technology and application for ground vehicles. J. Automot. Saf. Energy 2014, 5, 121–131. [Google Scholar]
- Beusen, B.; Broekx, S.; Denys, T.; Beckx, C.; Degraeuwe, B.; Gijsbers, M.; Scheepers, K.; Govaerts, L.; Torfs, R.; Panis, L.I. Using on-board logging devices to study the longer-term impact of an eco-driving course. Transp. Res. Part D Transp. Environ. 2009, 14, 514–520. [Google Scholar] [CrossRef]
- Gilbert, E.G. Vehicle cruise: Improved fuel economy by periodic control. Automatica 1976, 12, 159–166. [Google Scholar] [CrossRef]
- Chen, X.; Yang, J.; Zhai, C.; Lou, J.; Yan, C. Economic adaptive cruise control for electric vehicles based on ADHDP in a car-following scenario. IEEE Access 2021, 9, 74949–74958. [Google Scholar] [CrossRef]
- Li, S.E.; Peng, H.; Li, K.; Wang, J. Minimum fuel control strategy in automated car-following scenarios. IEEE Trans. Veh. Technol. 2012, 61, 998–1007. [Google Scholar] [CrossRef]
- Li, S.E.; Peng, H. Strategies to minimize the fuel consumption of passenger cars during car-following scenarios. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2012, 226, 419–429. [Google Scholar] [CrossRef]
- Ioannou, P.A.; Stefanovic, M. Evaluation of ACC vehicles in mixed traffic: Lane change effects and sensitivity analysis. IEEE Trans. Intell. Transp. Syst. 2005, 6, 79–89. [Google Scholar] [CrossRef]
- Zhang, J.; Ioannou, P.A. Longitudinal control of heavy trucks in mixed traffic: Environmental and fuel economy considerations. IEEE Trans. Intell. Transp. Syst. 2006, 7, 92–104. [Google Scholar] [CrossRef]
- Wu, C.; Zhao, G.; Ou, B. A fuel economy optimization system with applications in vehicles with human drivers and autonomous vehicles. Transp. Res. Part D Transp. Environ. 2011, 16, 515–524. [Google Scholar] [CrossRef]
- Li, S.; Li, K.; Rajamani, R.; Wang, J. Model predictive multi-objective vehicular adaptive cruise control. IEEE Trans. Control. Syst. Technol. 2010, 19, 556–566. [Google Scholar] [CrossRef]
- Eben Li, S.; Li, K.; Wang, J. Economy-oriented vehicle adaptive cruise control with coordinating multiple objectives function. Veh. Syst. Dyn. 2013, 51, 1–17. [Google Scholar] [CrossRef]
- Luo, L.-h.; Liu, H.; Li, P.; Wang, H. Model predictive control for adaptive cruise control with multi-objectives: Comfort, fuel-economy, safety and car-following. J. Zhejiang Univ. SCIENCE A 2010, 11, 191–201. [Google Scholar] [CrossRef]
- Schmied, R.; Waschl, H.; Del Re, L. Extension and experimental validation of fuel efficient predictive adaptive cruise control. In Proceedings of the 2015 American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 4753–4758. [Google Scholar]
- Jia, Y.; Jibrin, R.; Itoh, Y.; Görges, D. Energy-optimal adaptive cruise control for electric vehicles in both time and space domain based on model predictive control. IFAC-PapersOnLine 2019, 52, 13–20. [Google Scholar] [CrossRef]
- Jia, Y.; Saito, T.; Itoh, Y.; Nukezhanov, Y.; Görges, D. Energy-optimal adaptive cruise control in time domain based on model predictive control. IFAC-PapersOnLine 2018, 51, 846–853. [Google Scholar] [CrossRef]
- Madhusudhanan, A.K. A method to improve an electric vehicle’s range: Efficient Cruise Control. Eur. J. Control. 2019, 48, 83–96. [Google Scholar] [CrossRef]
- He, H.; Xiong, R.; Fan, J. Evaluation of lithium-ion battery equivalent circuit models for state of charge estimation by an experimental approach. Energies 2011, 4, 582–598. [Google Scholar] [CrossRef]
- Moon, S.; Yi, K. Human driving data-based design of a vehicle adaptive cruise control algorithm. Veh. Syst. Dyn. 2008, 46, 661–690. [Google Scholar] [CrossRef]
- Martinez, J.-J.; Canudas-de-Wit, C. A safe longitudinal control for adaptive cruise control and stop-and-go scenarios. IEEE Trans. Control. Syst. Technol. 2007, 15, 246–258. [Google Scholar] [CrossRef]
- Li, L.; Wang, X.; Song, J. Fuel consumption optimization for smart hybrid electric vehicle during a car-following process. Mech. Syst. Signal Process. 2017, 87, 17–29. [Google Scholar] [CrossRef]
- Cao, K.; Hu, M.; Wang, D.; Qiao, S.; Guo, C.; Fu, C.; Zhou, A. All-wheel-drive torque distribution strategy for electric vehicle optimal efficiency considering tire slip. IEEE Access 2021, 9, 25245–25257. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Unit | Value |
|---|---|---|
| m | kg | 2270 |
| A | m2 | 3.0 |
| CD | - | 0.3 |
| f | - | 0.008 |
| r | m | 0.393 |
| i0 | - | 10.885 |
| α | deg | 0 |
| th | s | 1.5 |
| thmin | s | 1.2 |
| thmax | s | 2.5 |
| d0 | m | 5 |
| d0_min | m | 3 |
| d0_max | m | 6 |
| Δvmin | m/s | −3.5 |
| Δvmax | m/s | 4 |
| TTC | s | −2.5 |
| ds | m | 3 |
| amin | m/s2 | −2.8 |
| amax | m/s2 | 1.2 |
| jmin | m/s3 | −6 |
| jmax | m/s3 | 6 |
| Control Scheme | Energy Consumption (kWh) | ||
|---|---|---|---|
| NEDC | UDDS | WLTC | |
| MO-ACC | 1.3687 | 1.3762 | 3.5537 |
| EOCFC | 1.3614 | 1.3304 | 3.5000 |
| Improvement | 0.53% | 3.33% | 1.51% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Yao, C.; Guo, C.; Yang, Z.; Fu, C. Energy-Saving Optimization for Electric Vehicles in Car-Following Scenarios Based on Model Predictive Control. World Electr. Veh. J. 2023, 14, 42. https://doi.org/10.3390/wevj14020042
Liu Y, Yao C, Guo C, Yang Z, Fu C. Energy-Saving Optimization for Electric Vehicles in Car-Following Scenarios Based on Model Predictive Control. World Electric Vehicle Journal. 2023; 14(2):42. https://doi.org/10.3390/wevj14020042
Chicago/Turabian StyleLiu, Yang, Chuyang Yao, Cong Guo, Zhong Yang, and Chunyun Fu. 2023. "Energy-Saving Optimization for Electric Vehicles in Car-Following Scenarios Based on Model Predictive Control" World Electric Vehicle Journal 14, no. 2: 42. https://doi.org/10.3390/wevj14020042
APA StyleLiu, Y., Yao, C., Guo, C., Yang, Z., & Fu, C. (2023). Energy-Saving Optimization for Electric Vehicles in Car-Following Scenarios Based on Model Predictive Control. World Electric Vehicle Journal, 14(2), 42. https://doi.org/10.3390/wevj14020042