
Pedestrian Crossing Intention Prediction Method Based on Multi-Feature Fusion

Abstract
:1. Introduction
2. Materials and Methods
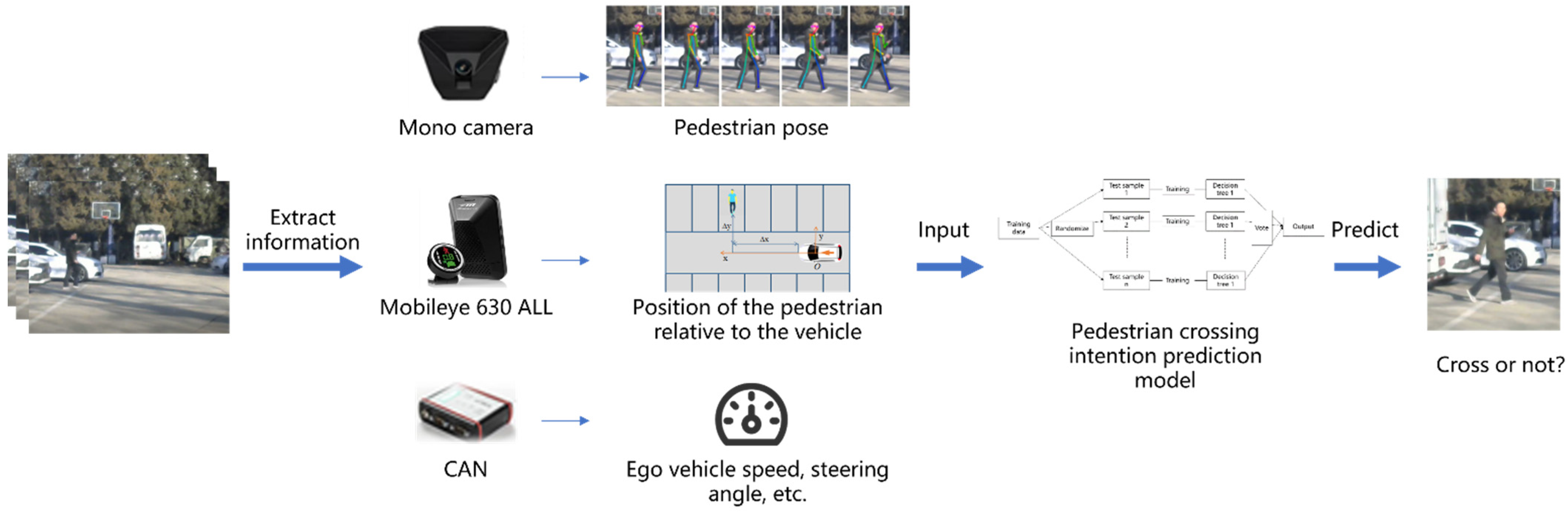
2.1. Framework
2.2. Dataset
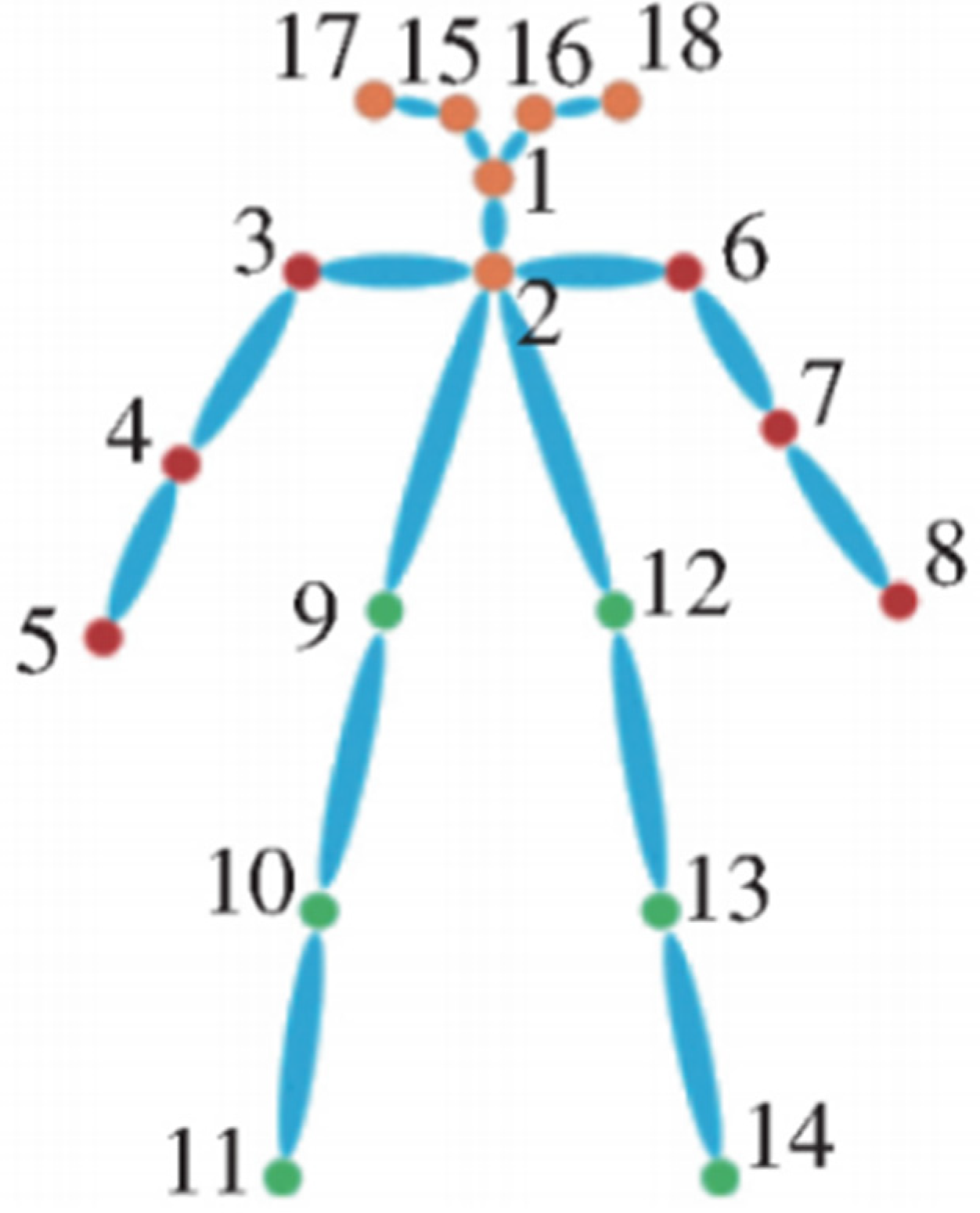
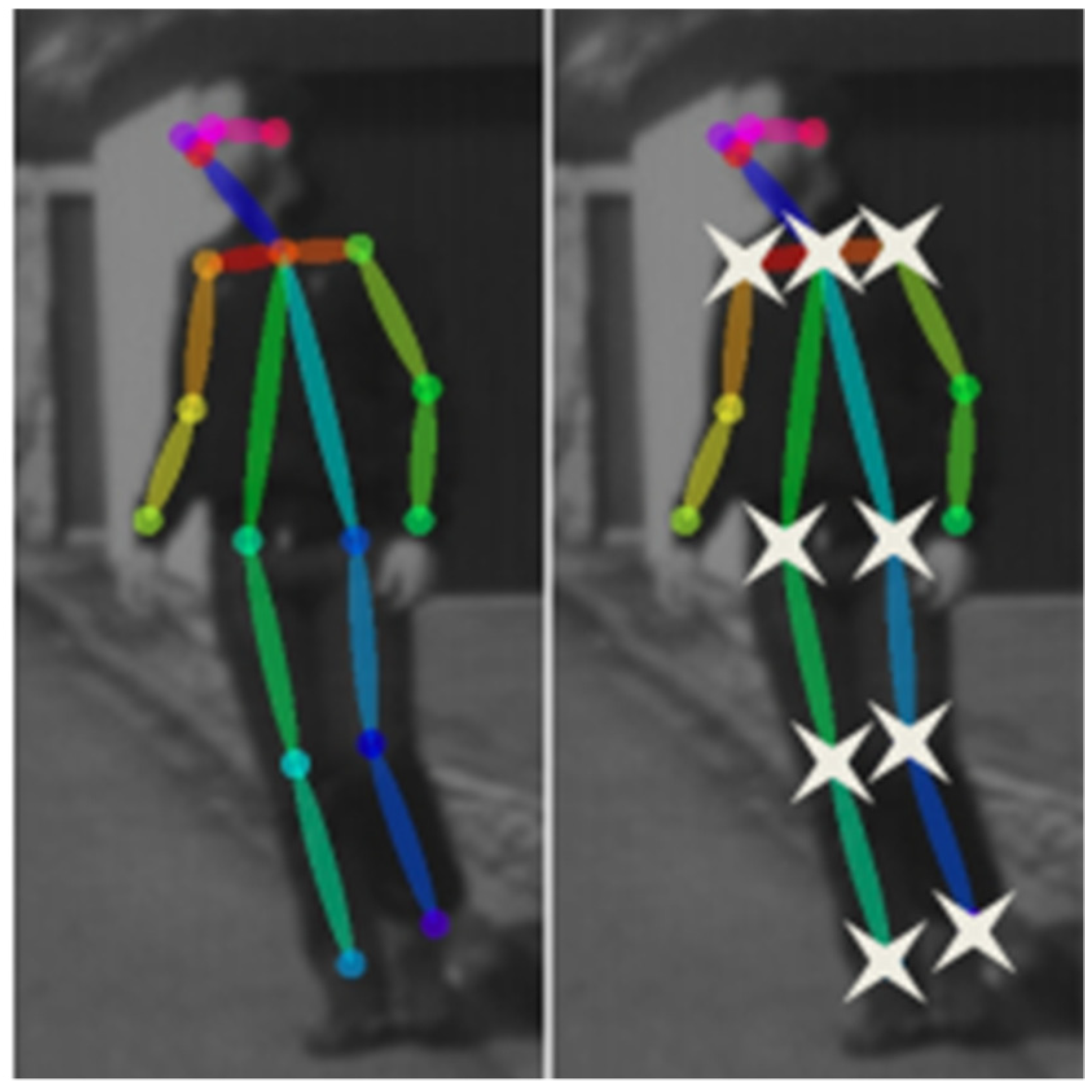
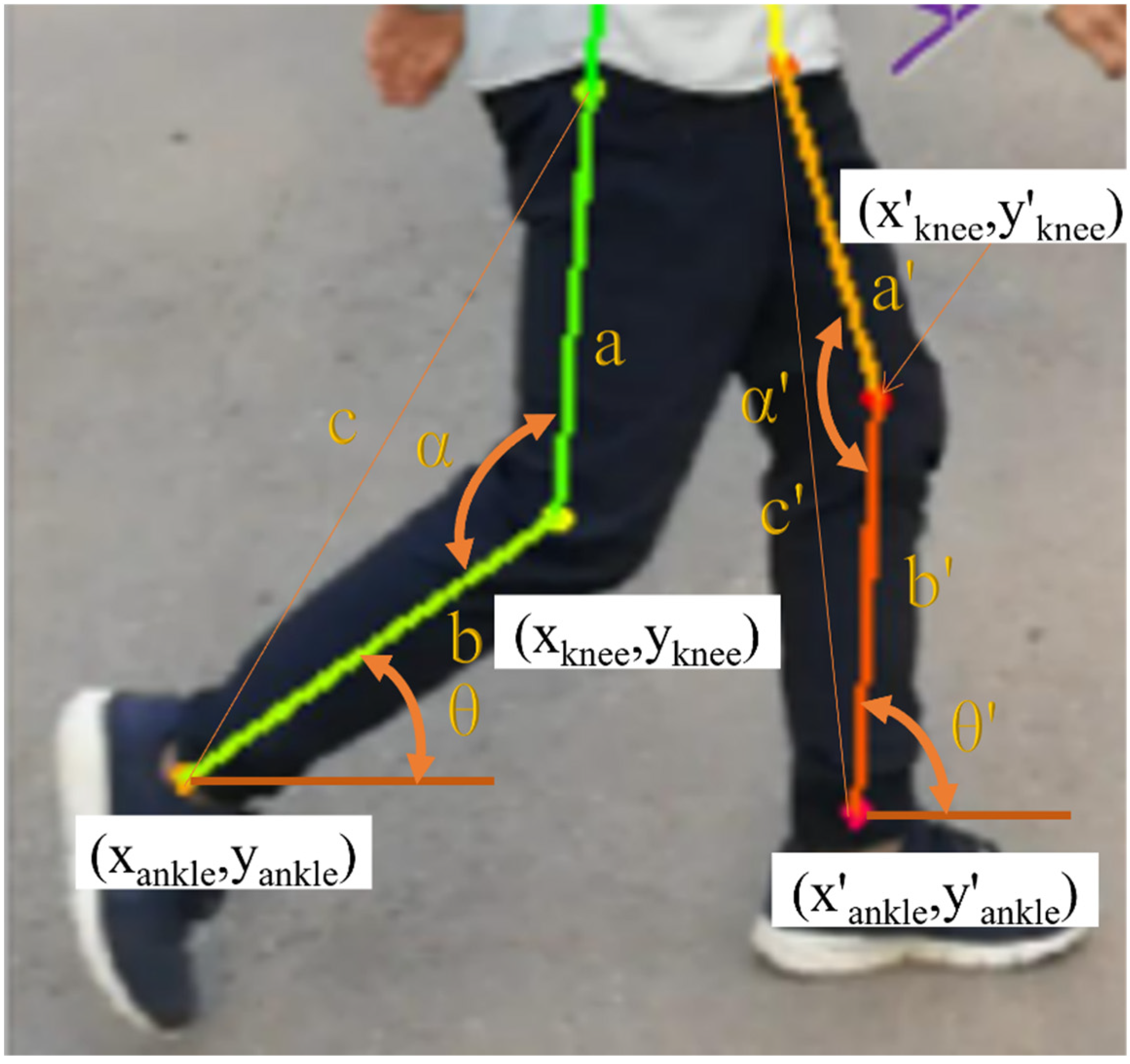
2.3. Key Characteristics of Pedestrian Behavior
2.4. Pedestrian Crossing Intention Prediction
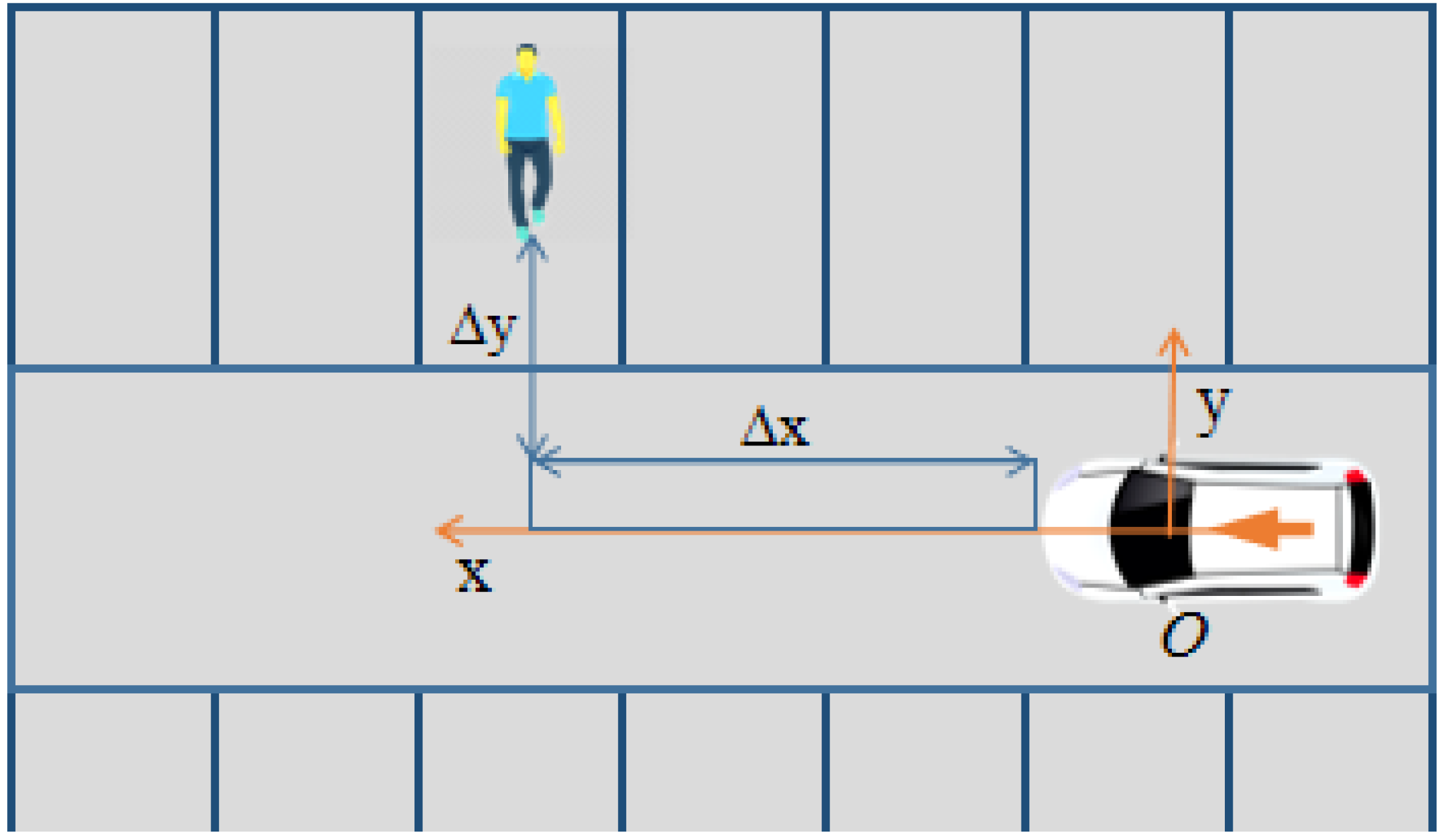
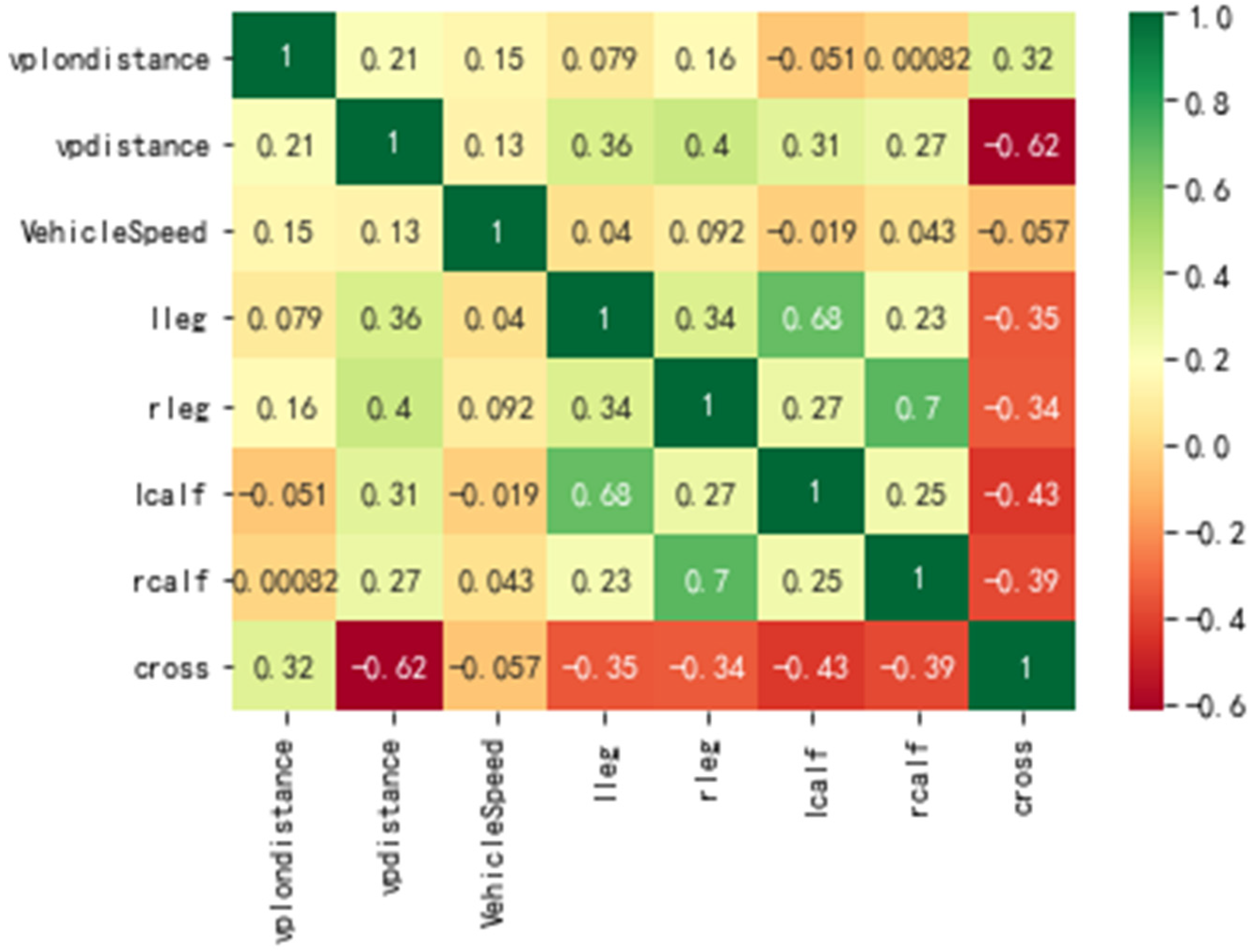
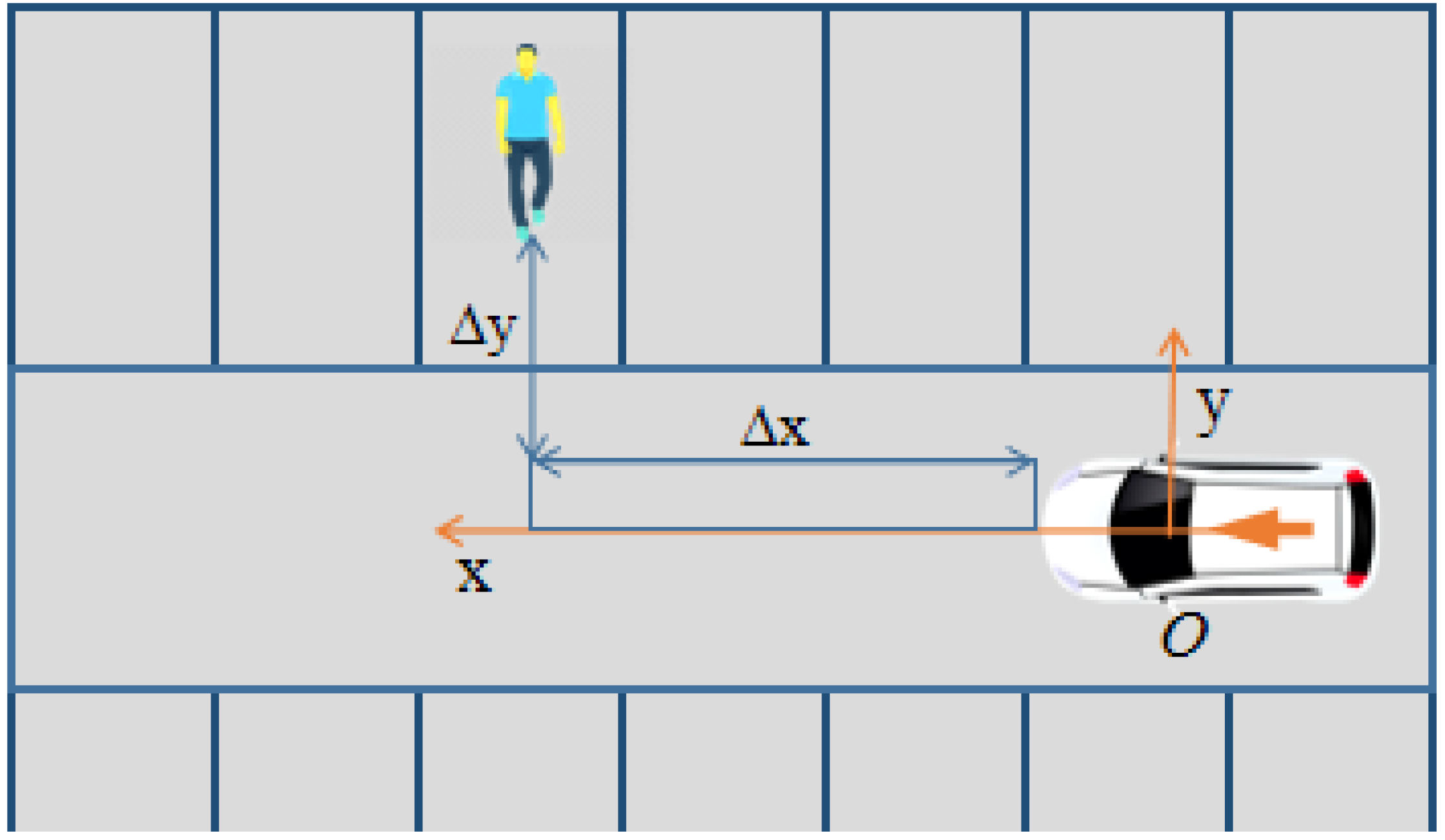
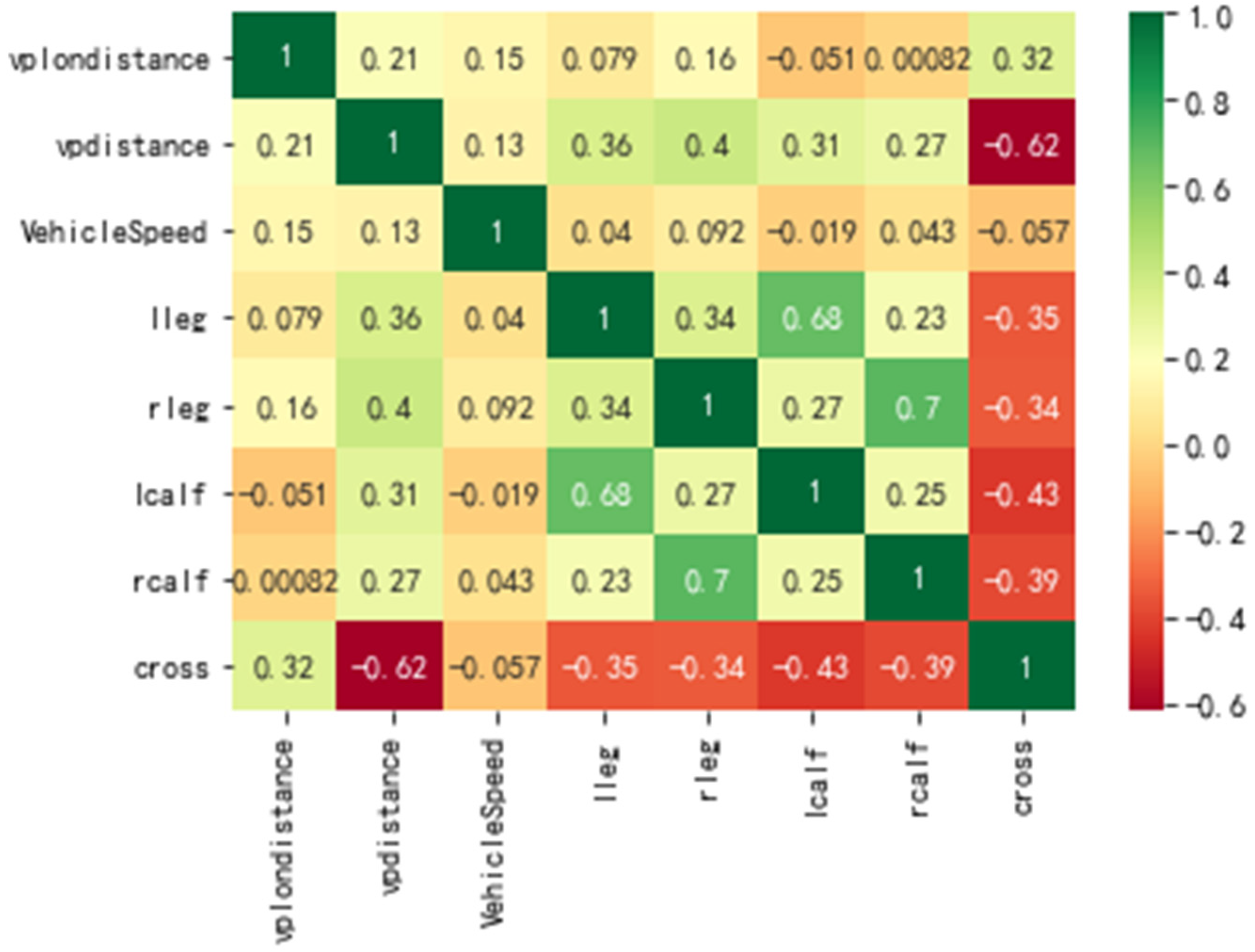
2.4.1. Factors Affecting Pedestrian Crossing Intention
2.4.2. Random Forest Model
3. Results and Analysis
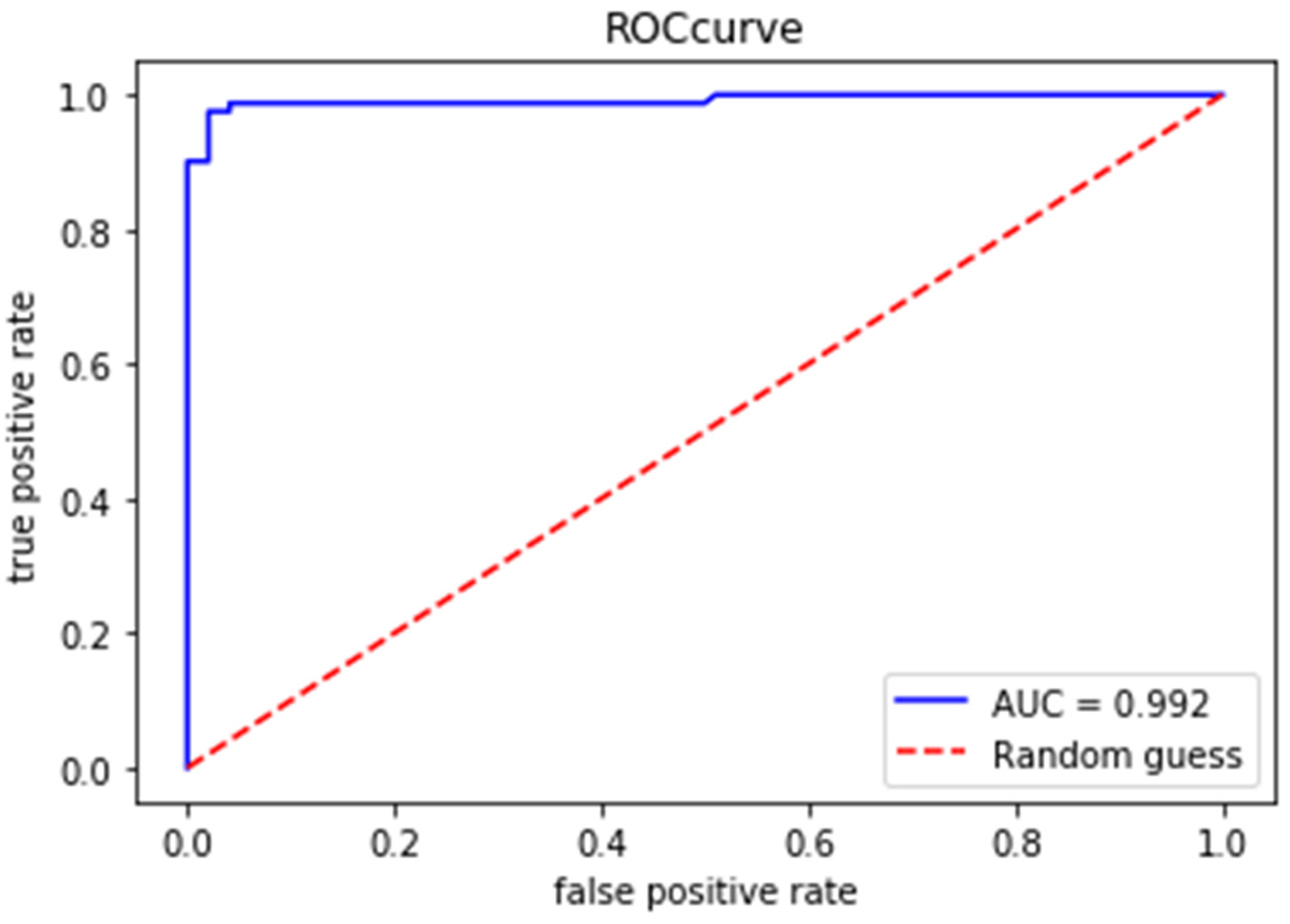
3.1. Benchmark and Metrics
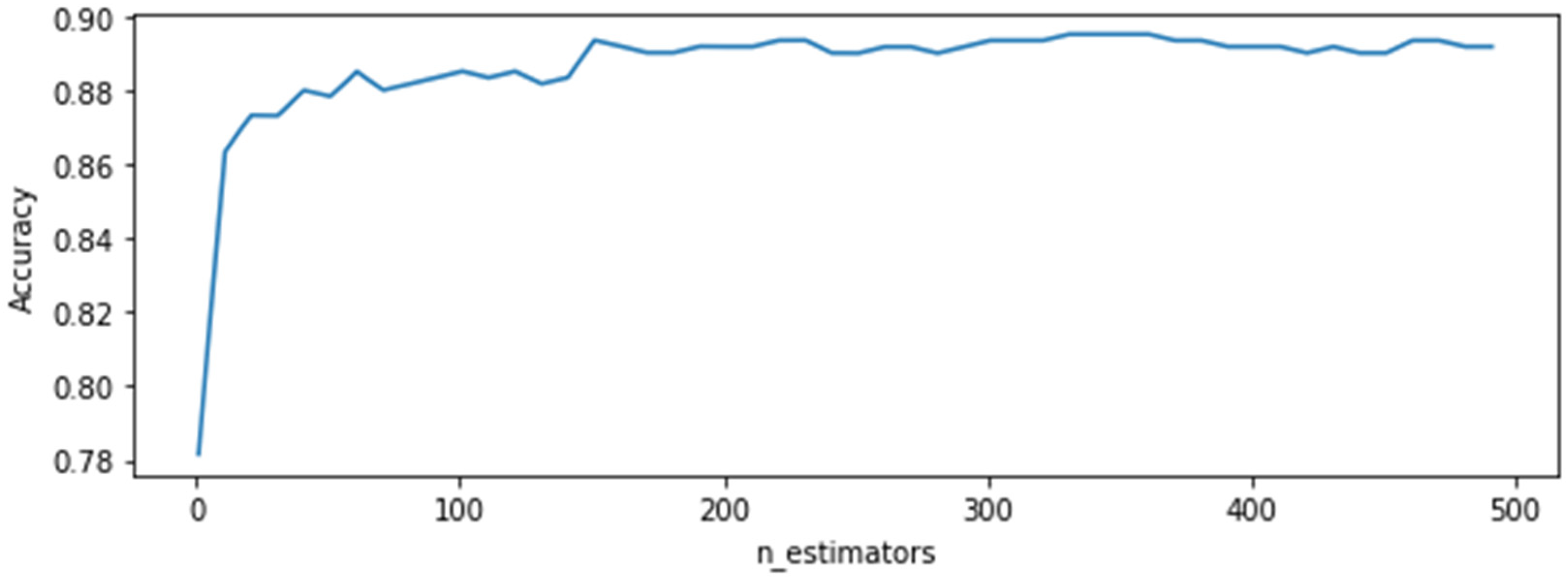
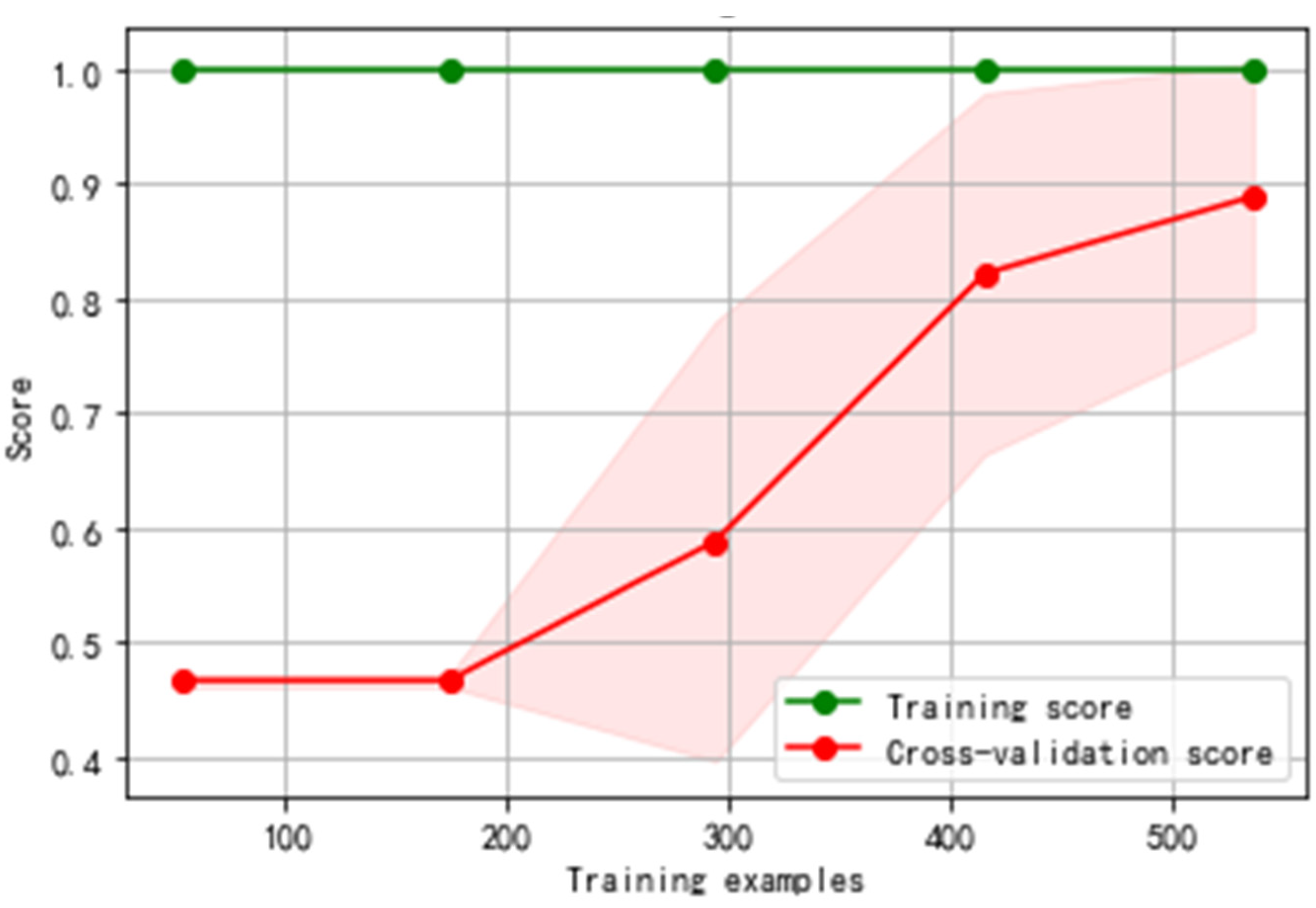
3.2. Model Parameters
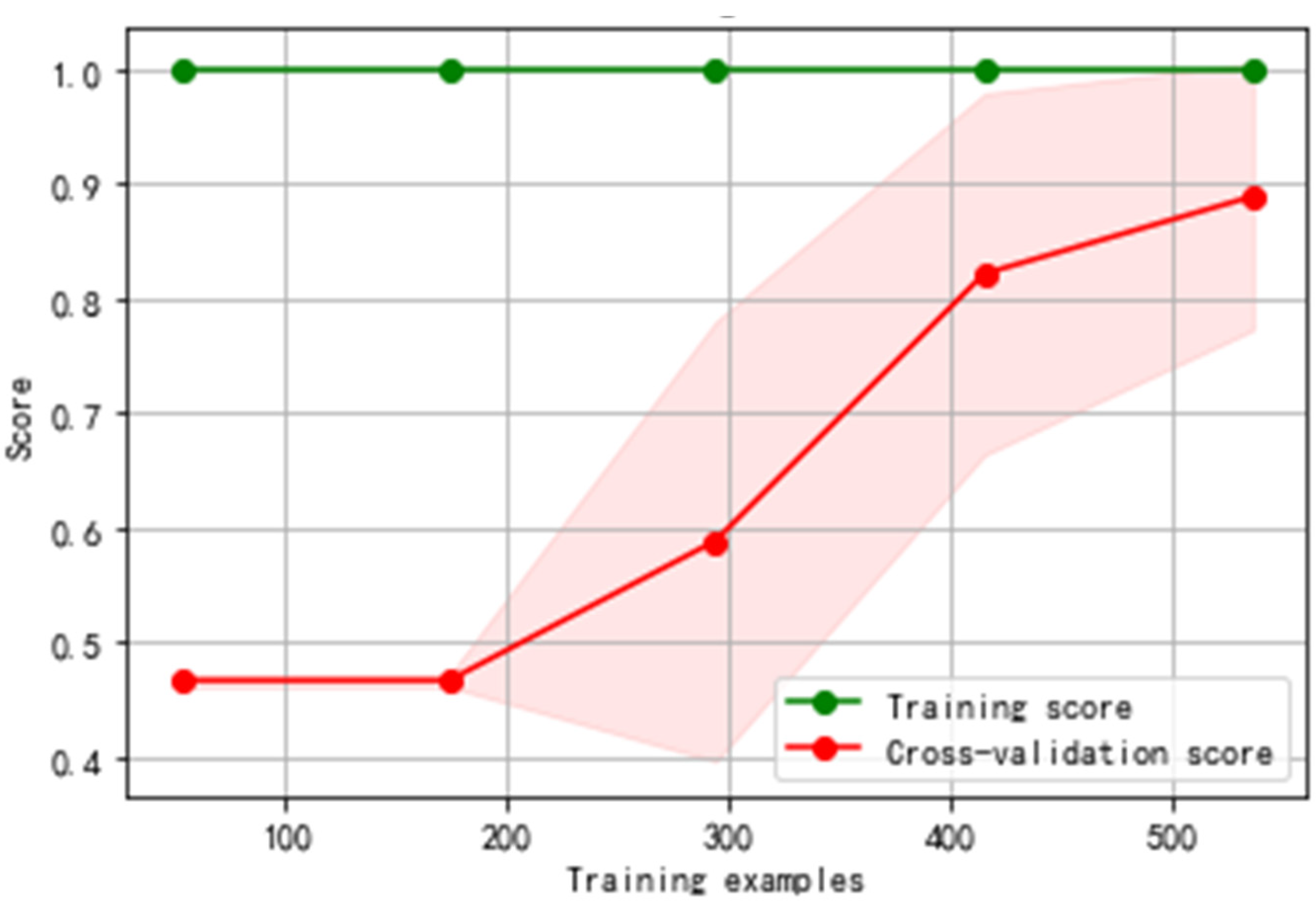
3.3. Quantitative Analysis of Pedestrian Crossing Intention
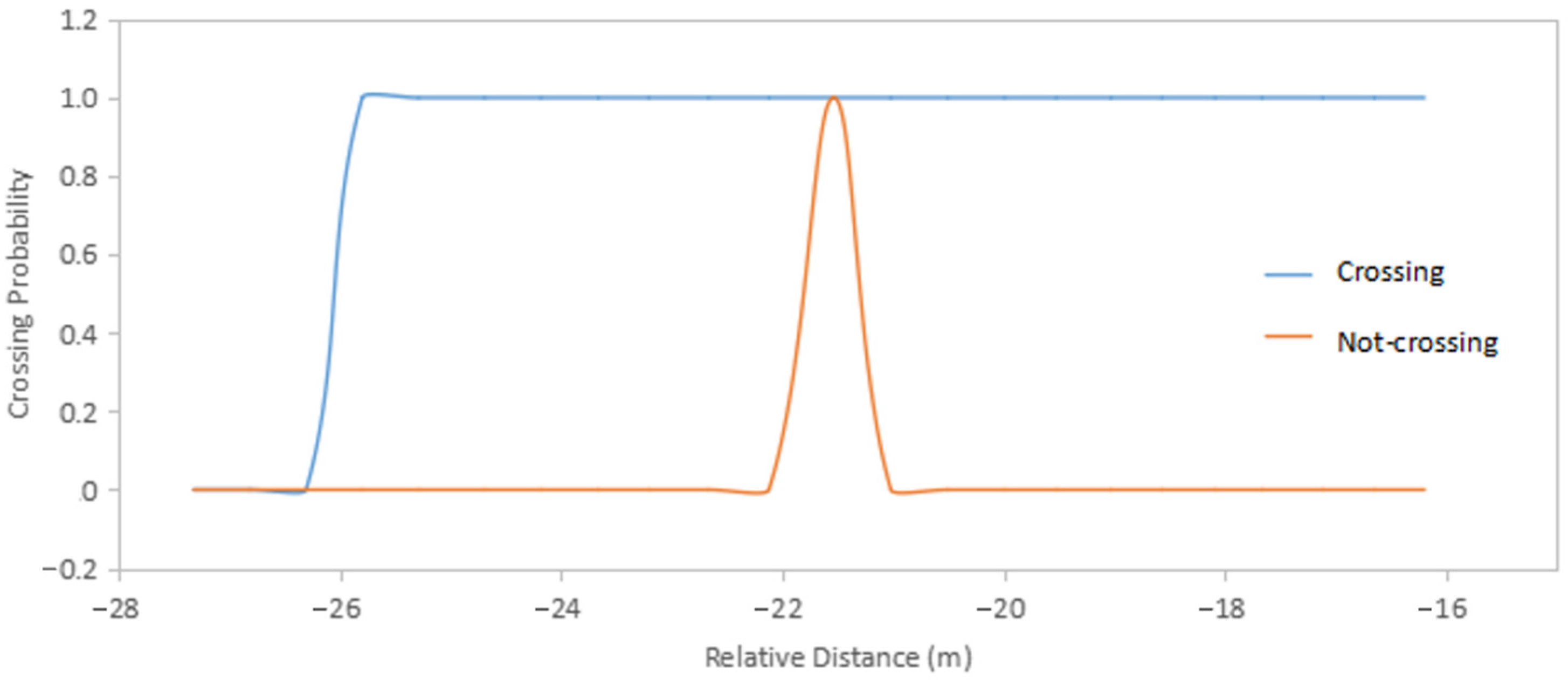
3.4. Qualitative Analysis of Pedestrian Crossing Intention
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Zhang, Y. World Health Organization Releases Global Status Report on Road Safety 2018. Chin. Disaster Relief Med. 2019, 7, 100. [Google Scholar]
- Ouyang, J.; Shi, Q.; Wang, X.; Wang, L. Research on pedestrian trajectory prediction based on GAN and attention mechanism. Adv. Lasers Optoelectron. 2019, 57, 1–20. [Google Scholar]
- Helbing, D. A mathematical model for the behavior of pedestrians. Behav. Sci. 1991, 36, 298–310. [Google Scholar] [CrossRef]
- Helbing, D. A Fluid Dynamic Model for the Movement of Pedestrians. Complex Syst. 1998, 6, 391–415. [Google Scholar]
- Zeng, W.; Chen, P.; Nakamura, H.; Iryo-Asano, M. Application of social force model to pedestrian behavior analysis at signalized crosswalk. Transp. Res. Part C 2014, 40, 143–159. [Google Scholar] [CrossRef]
- Zeng, W.; Chen, P.; Yu, G.; Wang, Y. Specification and calibration of a microscopic model for pedestrian dynamic simulation at signalized intersections: A hybrid approach. Transp. Res. Part C 2017, 80, 37–70. [Google Scholar] [CrossRef]
- Shen, M.; Habibi, G.; How, J. Transferable pedestrian motion prediction models at intersections. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 4547–4553. [Google Scholar]
- Fang, Z.; Vázquez, D.; López, A.M. On-Board Detection of Pedestrian Intentions. Sensors 2017, 17, 2193. [Google Scholar] [CrossRef] [PubMed]
- Quintero, M.; Parra, A.; Fernandez-Llorca, D.; Sotelo, M.A. Pedestrian Path, Pose, and Intention Prediction Through Gaussian Process Dynamical Models and Pedestrian Activity Recognition. IEEE Trans. Intell. Transp. Syst. 2019, 20, 1803–1814. [Google Scholar] [CrossRef]
- Gesnouin, J.; Pechberti, S.; Bresson, G.; Stanciulescu, B.; Moutarde, F. Predicting intentions of pedestrians from 2d skeletal pose sequences with a representation-focused multi-branch deep learning network. Algorithms 2020, 13, 331. [Google Scholar] [CrossRef]
- Bonnin, S.; Weisswange, T.; Kummert, F.; Schmuedderich, J. General Behavior Prediction by a Combination of Scenario-Specific Models. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1478–1488. [Google Scholar] [CrossRef]
- Bonnin, S.; Weisswange, T.; Kummert, F.; Schmüdderich, J. Pedestrian crossing prediction using multiple context-based models. In Proceedings of the Intelligent Transportation Systems (ITSC), 2014 IEEE 17th International Conferrnce on IEEE, Chengdu, China, 19–21 December 2014; pp. 378–385. [Google Scholar]
- Volz, B.; Mielenz, H.; Siegwart, R.; Nieto, J. Predicting pedestrian crossing using Quantile Regression forests. In Proceedings of the Intelligent Vehicles Symposium, Gothenburg, Sweden, 19–22 June 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 426–432. [Google Scholar]
- Huang, Y.; Cui, J.; Fwanck, D.; Zhao, H.; Zha, H. Head pose based intention prediction using discrete dynamic bayesian network. In Proceedings of the 2013 Seventh International Conference on Distributed Smart Cameras (ICDSC), Palm Springs, CA, USA, 29 October–1 November 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–6. [Google Scholar]
- Jiang, S.; Wang, D.; Chen, Y.; Sun, D. Video-based pedestrian motion trajectory reproduction and street crossing behavior expression. J. Southeast Univ. 2012, 42, 1233–1237. [Google Scholar]
- Wang, Z.; Papanikolopoulos, N. Estimating pedestrian crossing states based on single 2D body pose. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 2205–2210. [Google Scholar]
- Zhou, X.; Ren, H.; Zhang, T.; Mou, X.; He, Y.; Chan, C.-Y. Prediction of Pedestrian Crossing Behavior Based on Surveillance Video. Sensors 2022, 22, 1467. [Google Scholar] [CrossRef] [PubMed]
- Wu, H. BPI_Dataset. 2020. Available online: https://github.com/wuhaoran111/BPI_Dataset (accessed on 10 March 2020).
- Gao, Y. Key Point Detection of Human Skeleton and Its Application in Pose Recognition; Chongqing University of Technology: Chongqing, China, 2019. [Google Scholar]
- Cao, Z.; Simon, T.; Wei, S.H.; Sheikh, Y. OpenPose: Realtime multi-person 2D pose estimation using part affinity fields. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5. [Google Scholar] [CrossRef] [Green Version]
- Peng, L.; Yang, L. Urban Classification Based on Random Forest Algorithm. Int. J. Adv. Res. 2019, 7, 844–849. [Google Scholar]
- Liu, B.; Adeli, E.; Cao, Z.; Lee, K.H.; Shenoi, A.; Gaidon, A.; Niebles, J.C. Spatio-temporal relationship reasoning for pedestrian intent prediction. IEEE Robot. Autom. Lett. 2020, 5, 3485–3492. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.; Cha, W. Comparison of classification performance between random forests and support vector machines. Software 2012, 33, 107–110. [Google Scholar]
- Fang, Z. Is the Pedestrian Going to Cross? Answering by 2D Pose Estimation; IEEE: Piscataway, NJ, USA, 2018; pp. 1271–1276. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | 1 | 2 | 3/6 | 4/7 | 5/8 | 9/12 | 10/13 | 11/14 | 15/16 | 17/18 |
|---|---|---|---|---|---|---|---|---|---|---|
| Name | Mouth | Neck | Left/Right shoulder | Left/Right elbow | Left/Right wrist | Left/Right hip | Left/Right knee | Left/Right ankle | Left/Right eye | Left/Right ear |
| Actual Result | Predicted Result | |
|---|---|---|
| 1 (Crossing) | 0 (Not-Crossing) | |
| 1 (Crossing) | True Positive (TP) | False Negative (FN) |
| 0 (Not-crossing) | False Positive (FP) | True Negative (TN) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, J.; Rong, W. Pedestrian Crossing Intention Prediction Method Based on Multi-Feature Fusion. World Electr. Veh. J. 2022, 13, 158. https://doi.org/10.3390/wevj13080158
Ma J, Rong W. Pedestrian Crossing Intention Prediction Method Based on Multi-Feature Fusion. World Electric Vehicle Journal. 2022; 13(8):158. https://doi.org/10.3390/wevj13080158
Chicago/Turabian StyleMa, Jun, and Wenhui Rong. 2022. "Pedestrian Crossing Intention Prediction Method Based on Multi-Feature Fusion" World Electric Vehicle Journal 13, no. 8: 158. https://doi.org/10.3390/wevj13080158
APA StyleMa, J., & Rong, W. (2022). Pedestrian Crossing Intention Prediction Method Based on Multi-Feature Fusion. World Electric Vehicle Journal, 13(8), 158. https://doi.org/10.3390/wevj13080158