Drivability Optimization by Reducing Oscillation of Electric Vehicle Drivetrains


Abstract
1. Introduction
2. State of Research
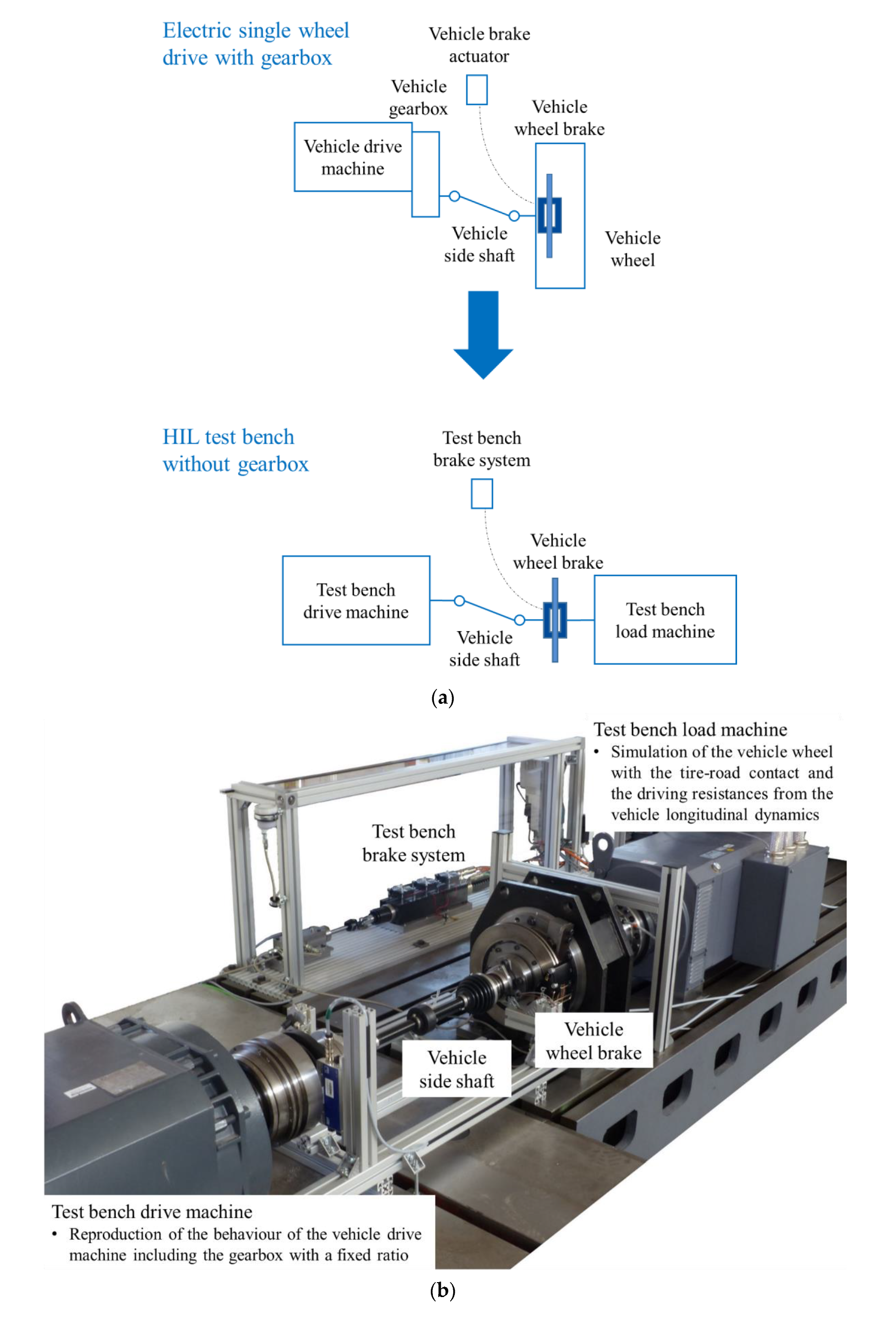
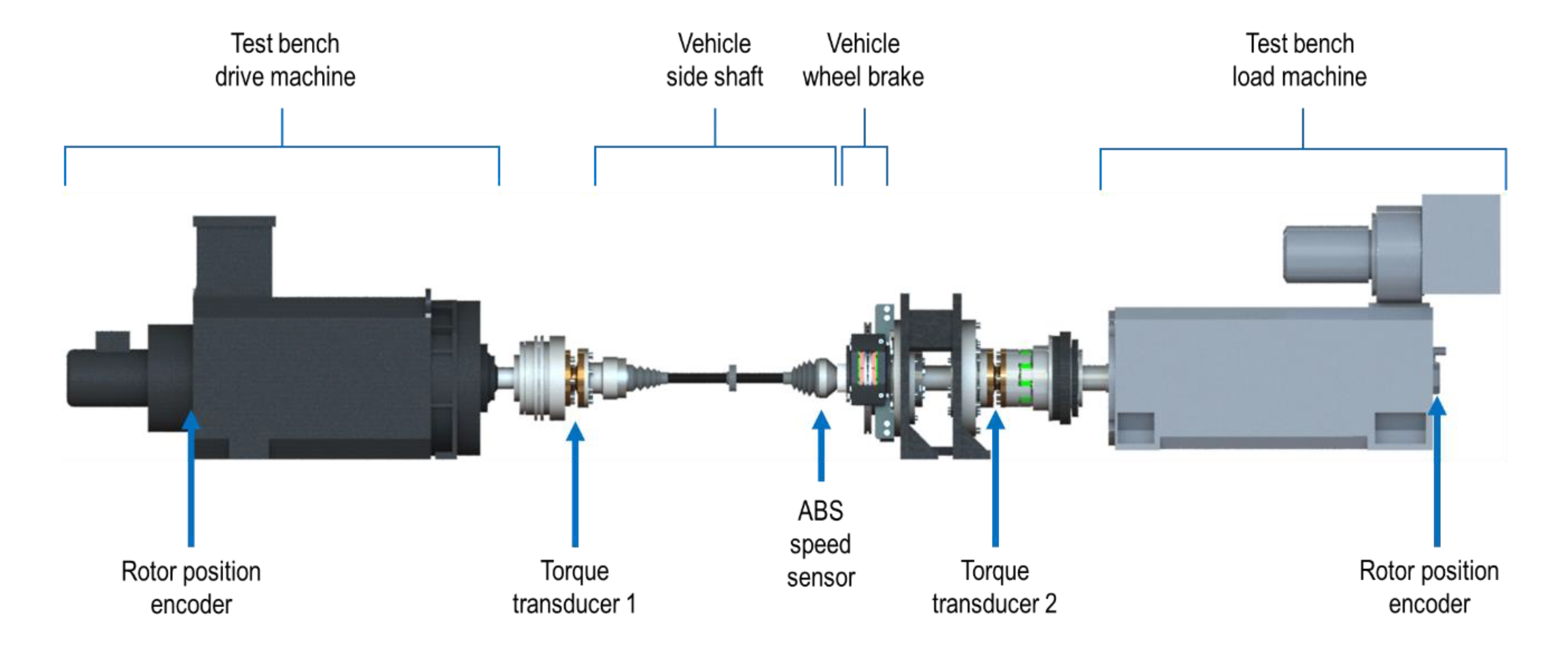
3. Test Environment
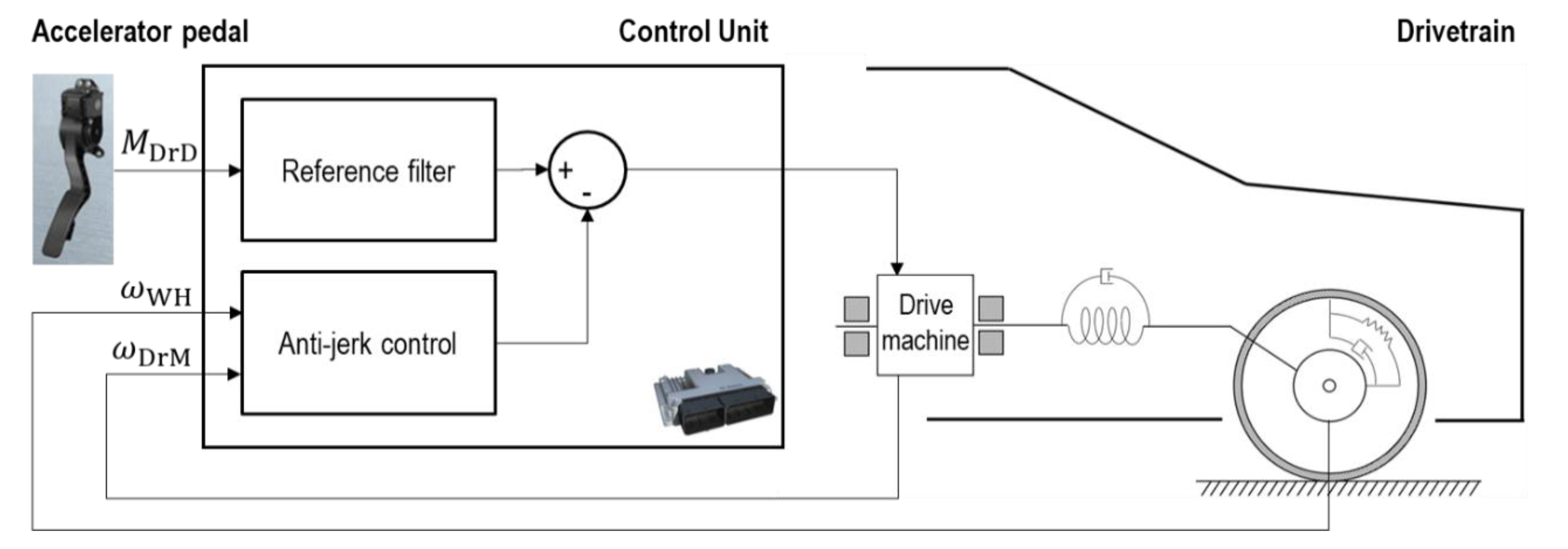
4. Drivability Function
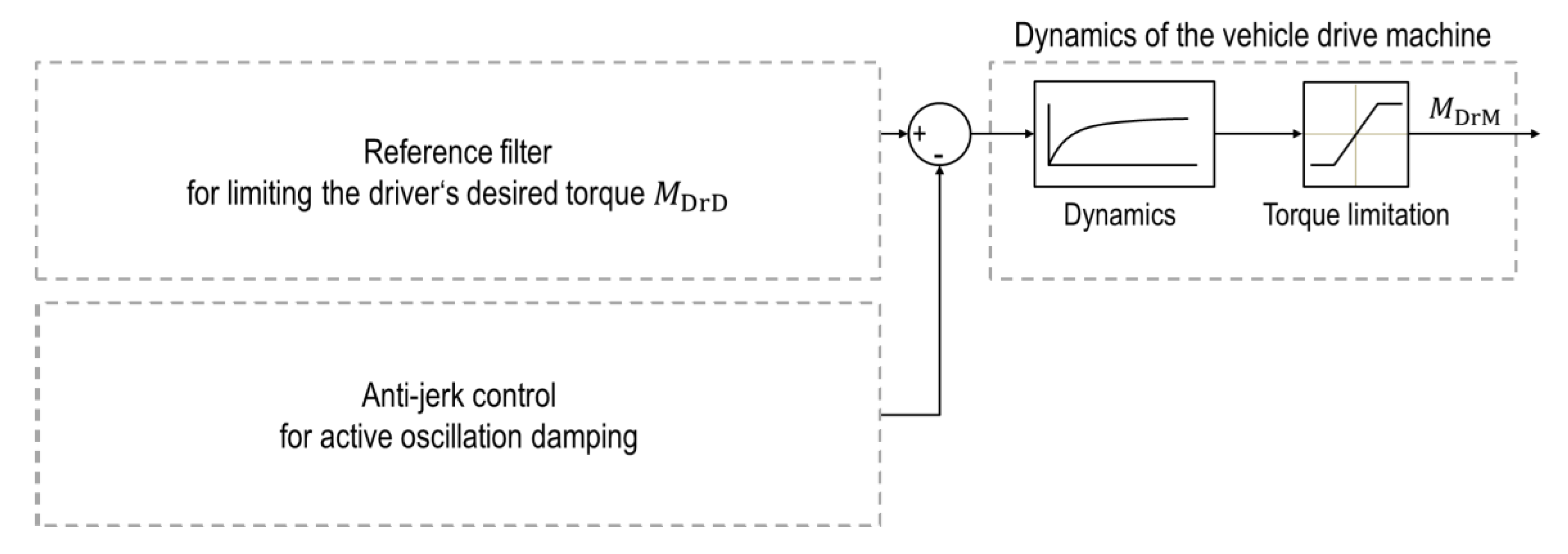
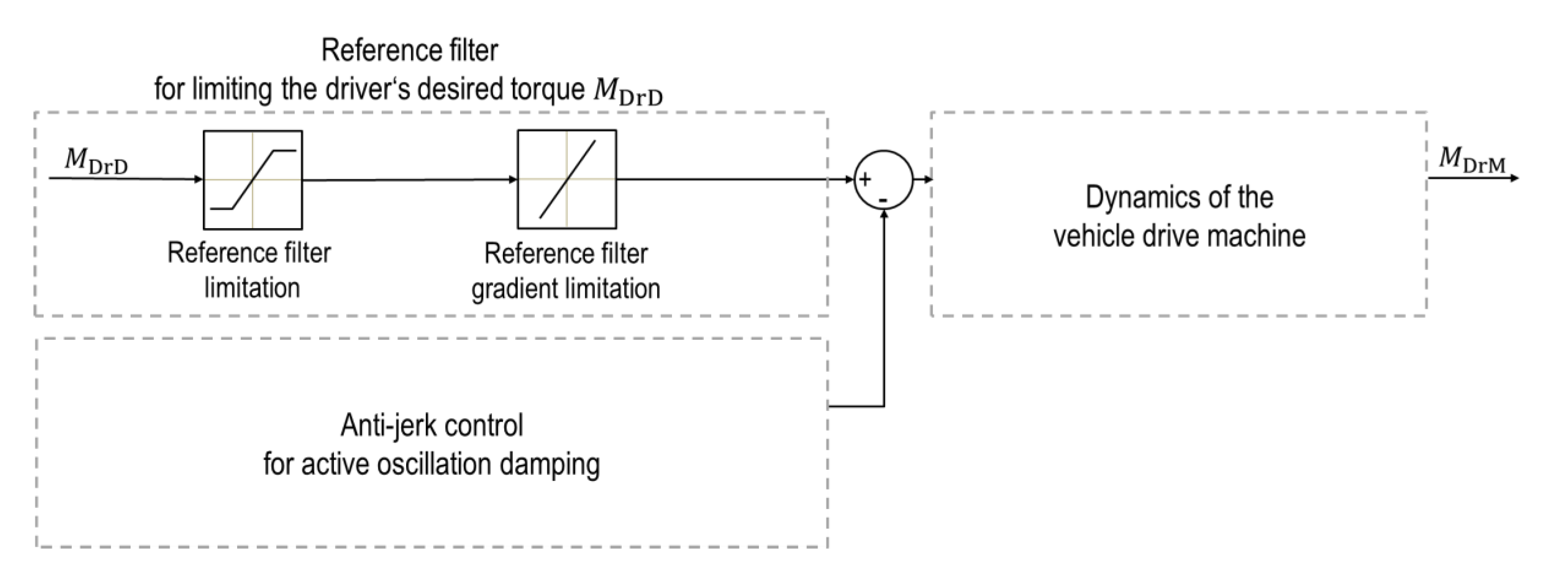
4.1. Reference Filter with Torque Gradient Limitation
4.1.1. Functionality of the Reference Filter
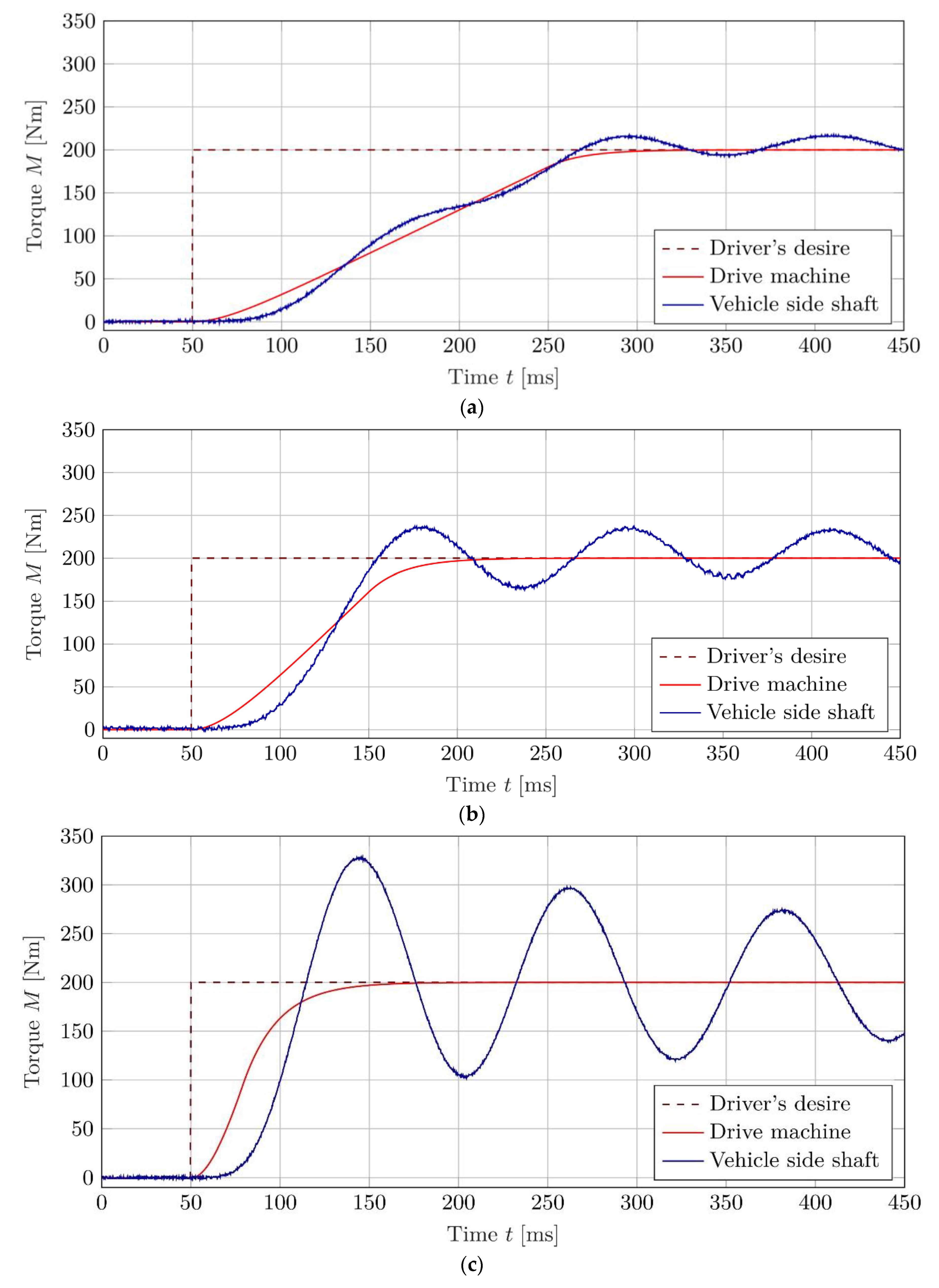
4.1.2. Measurement by Using the Reference Filter
4.2. Anti-Jerk Control
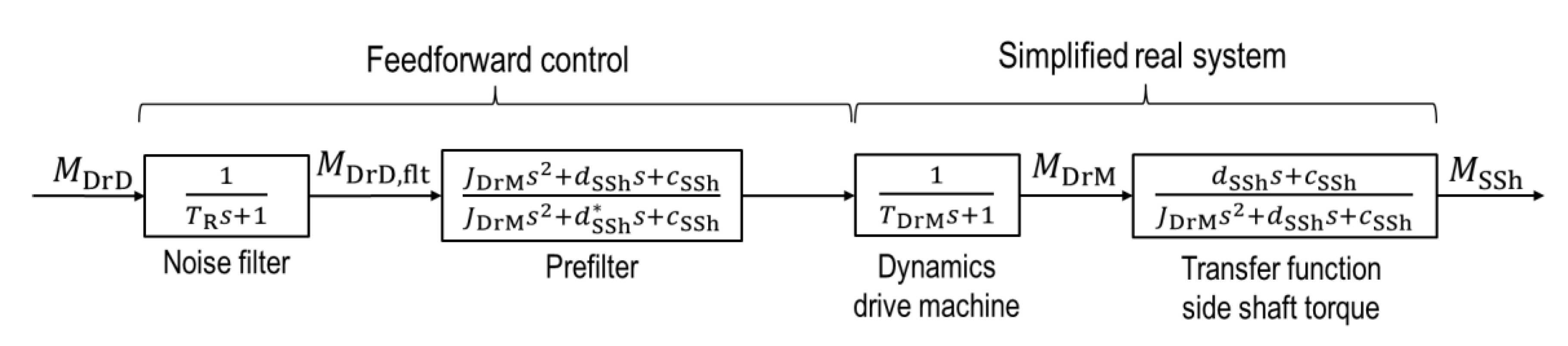
5. Prefilter Using Inverse Dynamics
5.1. Prefilter Design
5.2. Measurement by Using the Designed Prefilter
6. Prefilter Using Inverse Dynamics and Anti-Jerk Control
6.1. Anti-Jerk Control Design
6.2. Measurement by Using the Designed Prefilter and the Anti-Jerk Control
7. Summary and Outlook
Author Contributions
Funding
Conflicts of Interest
References
- Reif, K. Automobilelektronik; 4. Aufl.; Vieweg + Teubner Verlag: Wiesbaden, Germany, 2012; ISBN 978-3-8348-1498-2. [Google Scholar]
- Burkhardt, M. Fahrwerktechnik: Radschlupf-Regelsysteme; 1 Aufl.; Vogel Verlag: Würzburg, Germany, 1993; ISBN 3-8023-0477-2. [Google Scholar]
- Reif, K. Brakes, Brake Control and Driver Assistance Systems: Function, Regulation and Components; Springer Vieweg GmbH: Wiesbaden, Germany, 2014. [Google Scholar] [CrossRef]
- Ivanov, V.; Savitski, D.; Shyrokau, B. A Survey of Traction Control and Antilock Braking Systems of Full Electric Vehicles with Individually Controlled Electric Motors; IEEE Transactions on Vehicular Technology: Sendai, Japan, 2015; Volume 64. [Google Scholar] [CrossRef]
- Amann, N.; Bocker, J.; Prenner, F. Active damping of drive train oscillations for an electrically driven vehicle. IEEE/ASME Trans. Mechatron. 2004, 9. [Google Scholar] [CrossRef]
- Götting, G.; De Doncker, R.W. Active drive control of electric vehicles using a modal state observer. In Proceedings of the 2004 IEEE 35th Annual Power Electronics Specialists Conference (IEEE Cat. No.04CH37551), Aachen, Germany, 20–25 June 2004. [Google Scholar]
- Orus, J.; Theunissen, J.; Meneses, R.; Rodriguez-Fortun, J.-M. Active vibration control for torsional oscillations in powertrains for fully electric vehicles. In F2014-Special Session ‘Vehicle Dynamics Control for Fully Electric Vehicles—Outcomes of the European Project E-VECTOORC; Flanders’ Drive Belgium: Lommel, Belgium, 2014. [Google Scholar]
- Menne, M. Drehschwingungen im Antriebsstrang von Elektrostraßenfahrzeugen–Analyse und aktive Dämpfung; Wissenschaftsverlag Mainz: Mainz, Germany, 2001; ISBN 3-86073-684-1. [Google Scholar]
- Rodríguez, J.-M.; Meneses, R.; Orús, J. Active vibration control for electric vehicle compliant drivetrains. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013. [Google Scholar] [CrossRef]
- Zhao, S.; Lasson, A.; Wallmark, O.; Leksell, M. Off-Vehicle Evaluation of Active Oscillation Damping Schemes. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2. [Google Scholar] [CrossRef]
- Karikomi, T.; Itou, K.; Okubo, T.; Fujimoto, S. Development of the shaking vibration control for electric vehicles. In Proceedings of the 2006 SICE-ICASE International Joint Conference, Busan, Korea, 18–21 October 2006. [Google Scholar] [CrossRef]
- Kawamura, H.; Ito, K.; Karikomi, T.; Kume, T. Highly-responsive acceleration control for the Nissan LEAF electric vehicle. SAE Tech. Pap. 2011. [Google Scholar] [CrossRef]
- Scamarcio, A.; Gruber, P.; De Pinto, S.; Sorniotti, A. Anti-jerk controllers for automotive applications: A review. Annu. Rev. Control. 2020. [Google Scholar] [CrossRef]
- Rosenberger, M. Audi Dissertationsreihe. Bd. 89: Regelung Radnaher Elektrischer Einzelradantriebe Während der ABS-Bremsung; Cuvillier Verlag: Göttingen, Germany, 2014; ISBN 978-3-95404-655-3. [Google Scholar]
- Koch, A. Entwicklung eines Hardware-In-The-Loop-Prüfstandes zur Untersuchung der Drehschwingungen und Bremssystemkoordination bei Einzelradantrieben von Elektrofahrzeugen; Verlag: Dr. Hut: München, Germany, 2018; ISBN 978-3-8439-3750-4. [Google Scholar]
- Koch, A.; Schulz, L.; Jakstas, G.; Falkenstein, J. Untersuchung und Optimierung des Einflusses von niedrig auflösenden Rotorlagegebern auf die Fahrbarkeitsfunktionen elektrifizierter Fahrzeugantriebssysteme mittels eines Hardware-in-the-Loop-Prüfstands. In Forschung im Ingenieurwesen; Springer Nature: Heidelberg, Germany, 2020. [Google Scholar] [CrossRef]
- Koch, A.; Jakstas, G.; Falkenstein, J. Elektrohydraulischer Bremsaktuator zur Nachbildung von Fahrzeug-Bremssystemen; antriebstechnik 11/2017; Vereinigte Fachverlage GmbH: Mainz, Germany, 2017; pp. 136–145. [Google Scholar]
- Beckhoff Automation GmbH. EtherCAT System-Dokumentation; Version: 5.1; Beckhoff Automation GmbH.: Verl, Germany, 2016. [Google Scholar]
- Nidec Control Techniques Ltd. User Guide: Unidrive M700/M701/M702; Version: 2.0; Nidec Control Techniques Ltd.: Newtown, UK, 2018. [Google Scholar]
- Jakstas, G.; Schulz, L.; Koch, A.; Falkenstein, J.; Gössner, S. 13. Kolloquium Getriebetechnik: Untersuchung und Optimierung des Anfahrverhaltens bei Elektrifizierten Fahrzeugantriebssystemen Mittels Hardware-In-The-Loop-Prüfstand; Logos Verlag Berlin: Berlin, Germany, 2019; ISBN 978-3-8325-4979-4. [Google Scholar]
- Götting, G. Dynamische Antriebsregelung von Elektrostraßenfahrzeugen unter Berücksichtigung eines Schwingungsfähigen Antriebsstrangs; Shaker Verlag GmbH: Herzogenrath, Germany, 2004; ISBN 978-3-8322-2804-0. [Google Scholar]
- Unbehauen, H. Regelungstechnik 1: Klassische Verfahren zur Analyse und Synthese Linearer kontinuierlicher Regelsysteme, Fuzzy-Regelsysteme; 15. Auflage; Vieweg + Teubner Verlag: Wiesbaden, Germany, 2008; ISBN 978-3-8348-0497-6. [Google Scholar]
- Unbehauen, H.; Ley, F. Das Ingenieurwissen: Regelungs- und Steuerungstechnik; Springer GmbH: Berlin/Heidelberg, Germany, 2014. [Google Scholar] [CrossRef]
- Janschek, K. Systementwurf Mechatronischer Systeme: Methoden–Modelle–Konzepte; Springer GmbH: Berlin/Heidelberg, Germany, 2010. [Google Scholar] [CrossRef]
- Reif, K. Bosch Autoelektrik und Autoelektronik: Bordnetze, Sensoren und Elektronische Systeme; 6. Aufl.; Vieweg + Teubner Verlag: Wiesbaden, Germany; Springer Fachmedien Wiesbaden GmbH: Wiesbaden, Germany, 2011; ISBN 978-3-8348-1274-2. [Google Scholar]
- Berriri, M.; Chevrel, P.; Lefebvre, D. Active damping of automotive powertrain oscillations by a partial torque compensator. Control Eng. Pract. 2008, 16. [Google Scholar] [CrossRef]
- Grotjahn, M.; Quernheim, L.; Zemke, S. Modelling and identification of car driveline dynamics for anti-jerk controller design. IEEE Int. Conf. Mechatron. 2006. [Google Scholar] [CrossRef]
- Lunze, J. Regelungstechnik 2: Mehrgrößensysteme, Digitale Regelung; 3. Auflage; Springer GmbH: Berlin/Heidelberg, Germany, 2005; ISBN 3-540-22177-8. [Google Scholar]
- Lunze, J. Regelungstechnik 1: Systemtheoretische Grundlagen, Analyse und Entwurf einschleifiger Regelungen; 11. Auflage; Springer GmbH: Berlin/Heidelberg, Germany, 2016. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 200 | 1000 | 218 | 10.8 |
| 200 | 2000 | 105 | 18.4 |
| 200 | 7000 | 64 | 62.5 |
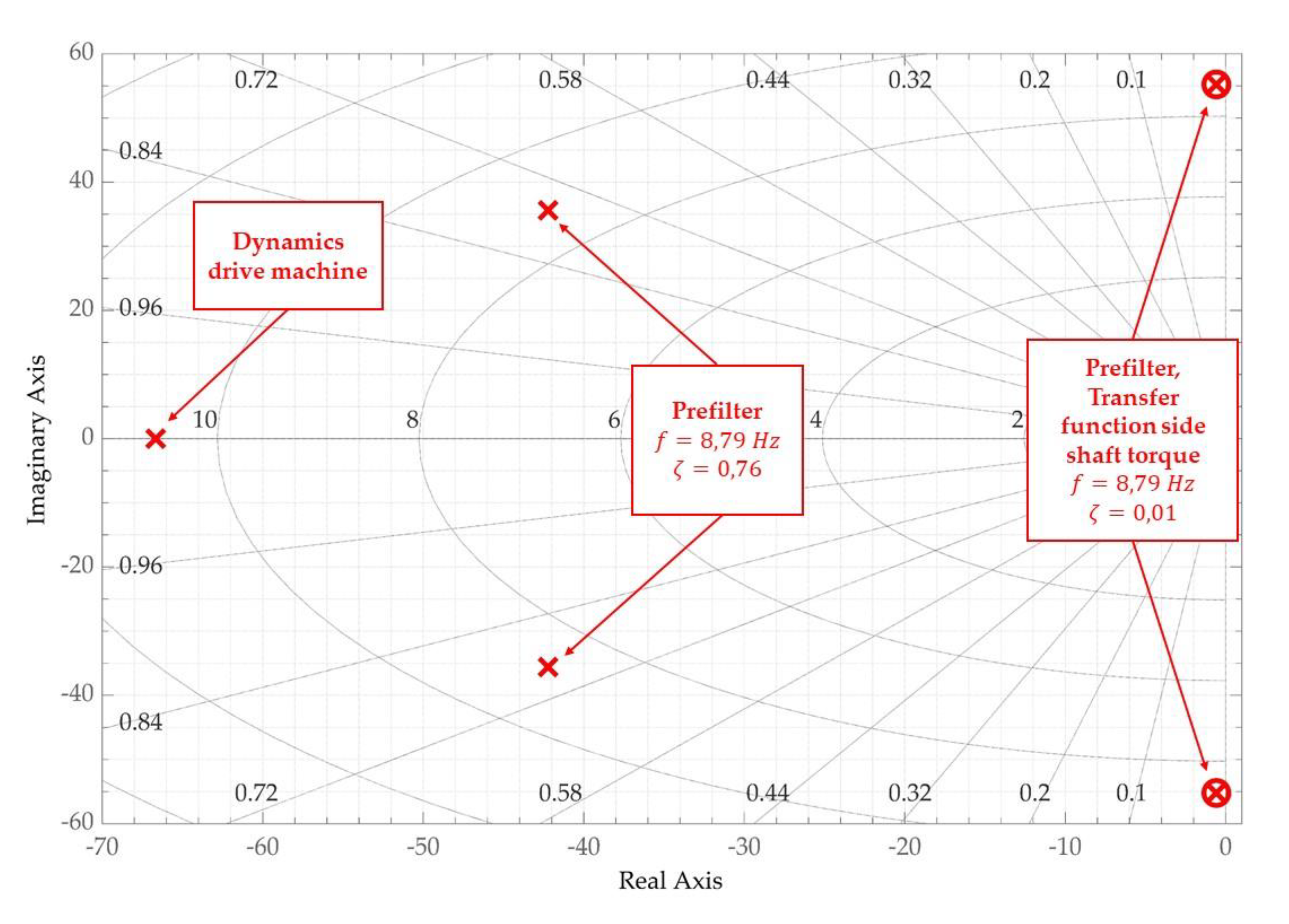
| Prefilter | Dynamics Drive Machine | Transfer Function Side Shaft Torque |
|---|---|---|
| Prefilter | Transfer Function Side Shaft Torque |
|---|---|
| (not shown in Figure 10) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koch, A.; Schulz, L.; Jakstas, G.; Falkenstein, J. Drivability Optimization by Reducing Oscillation of Electric Vehicle Drivetrains. World Electr. Veh. J. 2020, 11, 68. https://doi.org/10.3390/wevj11040068
Koch A, Schulz L, Jakstas G, Falkenstein J. Drivability Optimization by Reducing Oscillation of Electric Vehicle Drivetrains. World Electric Vehicle Journal. 2020; 11(4):68. https://doi.org/10.3390/wevj11040068
Chicago/Turabian StyleKoch, Andreas, Ludwig Schulz, Gabrielius Jakstas, and Jens Falkenstein. 2020. "Drivability Optimization by Reducing Oscillation of Electric Vehicle Drivetrains" World Electric Vehicle Journal 11, no. 4: 68. https://doi.org/10.3390/wevj11040068
APA StyleKoch, A., Schulz, L., Jakstas, G., & Falkenstein, J. (2020). Drivability Optimization by Reducing Oscillation of Electric Vehicle Drivetrains. World Electric Vehicle Journal, 11(4), 68. https://doi.org/10.3390/wevj11040068