Managing Emergencies Optimally Using a Random Neural Network-Based Algorithm

Abstract
:
1. Introduction
2. Literature Review
3. The RNN-Based Algorithm for Resource Allocation
3.1. The Random Neural Network Model

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Definition |
|---|---|
| Firing rate for neuron i | |
| Internal state of neuron i at time t | |
| Excitatory spike from the outside world to neuron i | |
| Inhibitory spike from the outside world to neuron i | |
| Probability of excitatory spike from neuron i to neuron j | |
| Probability of inhibitory spike from neuron i to neuron j | |
| Probability of departure spike from neuron i to the outside world | |
| Probability of neuron i being excited | |
| Stationary probability distribution |
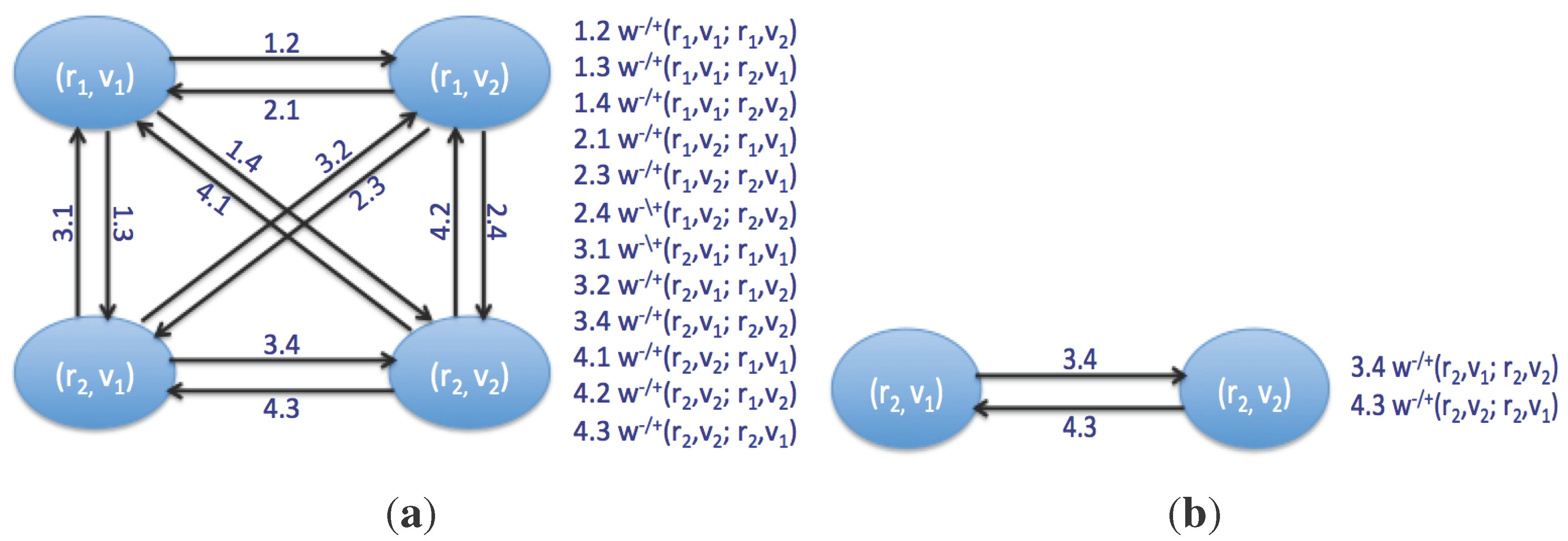
3.2. Task Assignment Algorithm Based on the RNN Model
| Notation | Definition |
|---|---|
| Penalty for not rescuing victim v | |
| Probability rescuer r is unable to rescue victim v | |
| Cost for saving victim v by rescuer r | |
| External arrival rate of excitatory signals to neuron (r, v) | |
| External arrival rate of inhibitory signals to neuron (r, v) | |
| Rate of excitatory signals to neuron (r, v) from firing neuron (r’, v’) | |
| Rate of inhibitory signals to neuron (r, v) from firing neuron (r’, v’) | |
| Firing rate of neuron (r, v) | |
| Probability neuron (r, v) is excited |
- Initialization: initialize (a) to R; (b) S to empty; (c) ; (d) the fail probability for each neuron, ; (e) the cost for each neuron, ; (f) for to zero: assume that all possible assignments have no effect on the cost of the objective function at the beginning.
- Compute the RNN parameters, , , , and , and construct a neural network for and .
- Iteratively compute for and based on Equation (17) until converges for all neurons.
| Algorithm 1 Task assignment for optimal emergency management. |
|
- 4.
- Select a rescuer-victim pair that has the highest probability of being active; if all for and , then stop: there is no assignment that can reduce the cost of the objective function.
- 5.
- Update the solution set, S, by adding new rescuer-victim pair into it.
- 6.
- Update the remaining rescuers set, , by removing rescuer from .
- 7.
- Reduce the penalty of the victim, , by the expected reduction: .
- 8.
- Check the remaining rescuers set , and if is not empty, then go to step (2); otherwise, stop: all rescuers have tasks.

3.3. Algorithm Complexity
4. Evaluation of the Task Assignment Algorithm
4.1. Assumptions
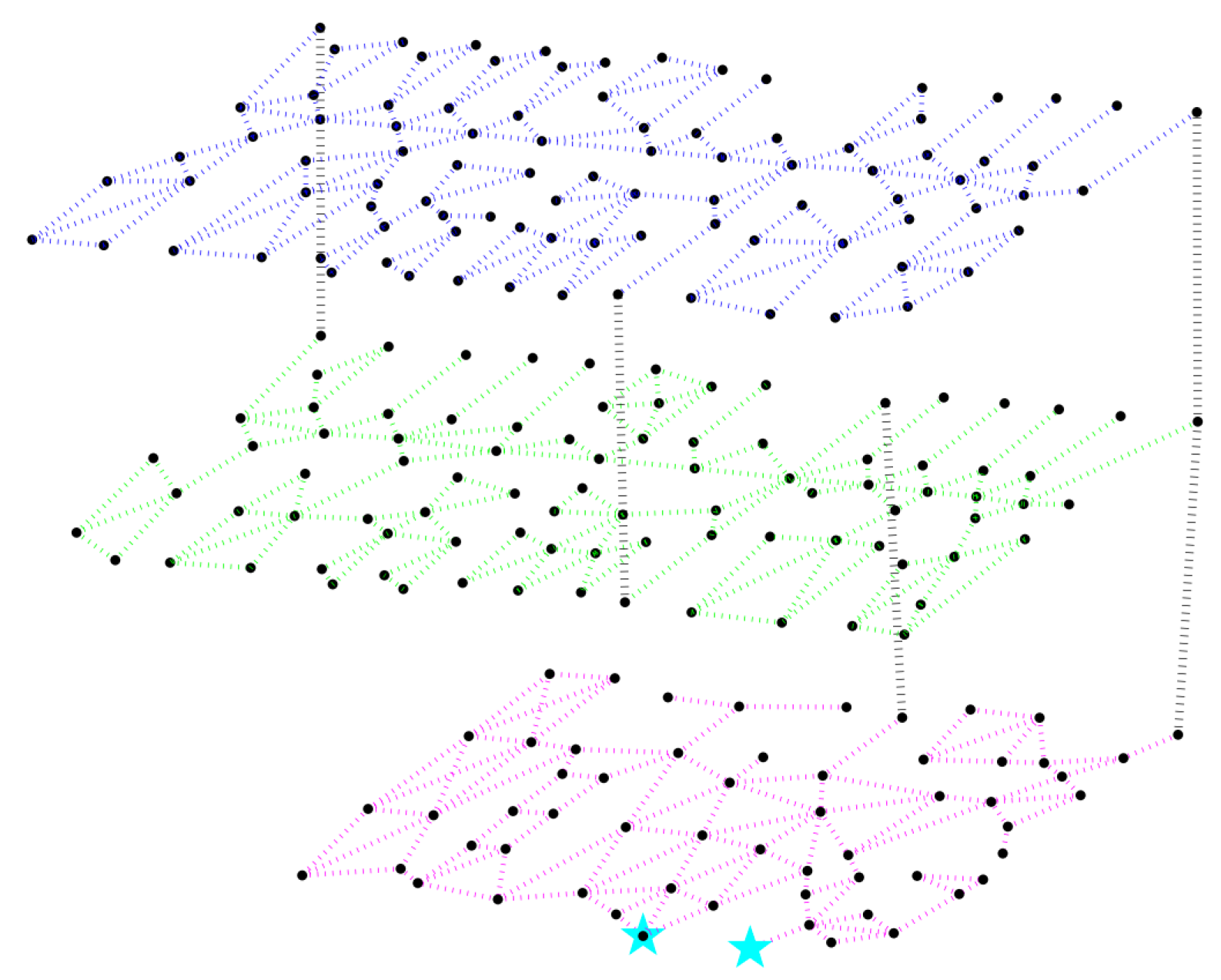
4.2. Description of the Simulation Model
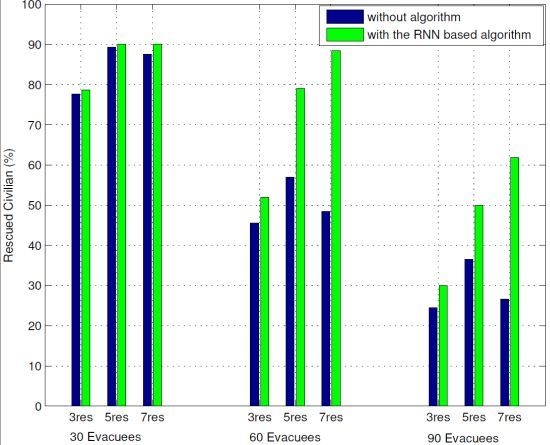
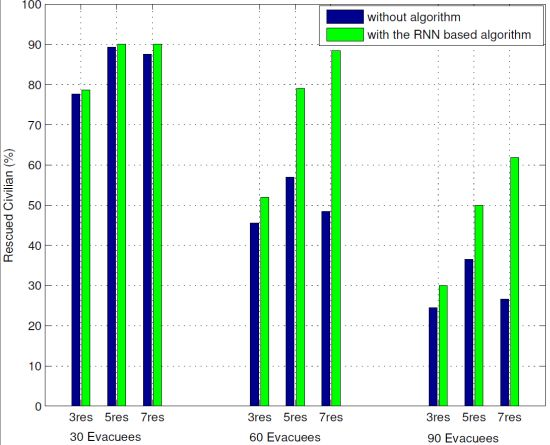
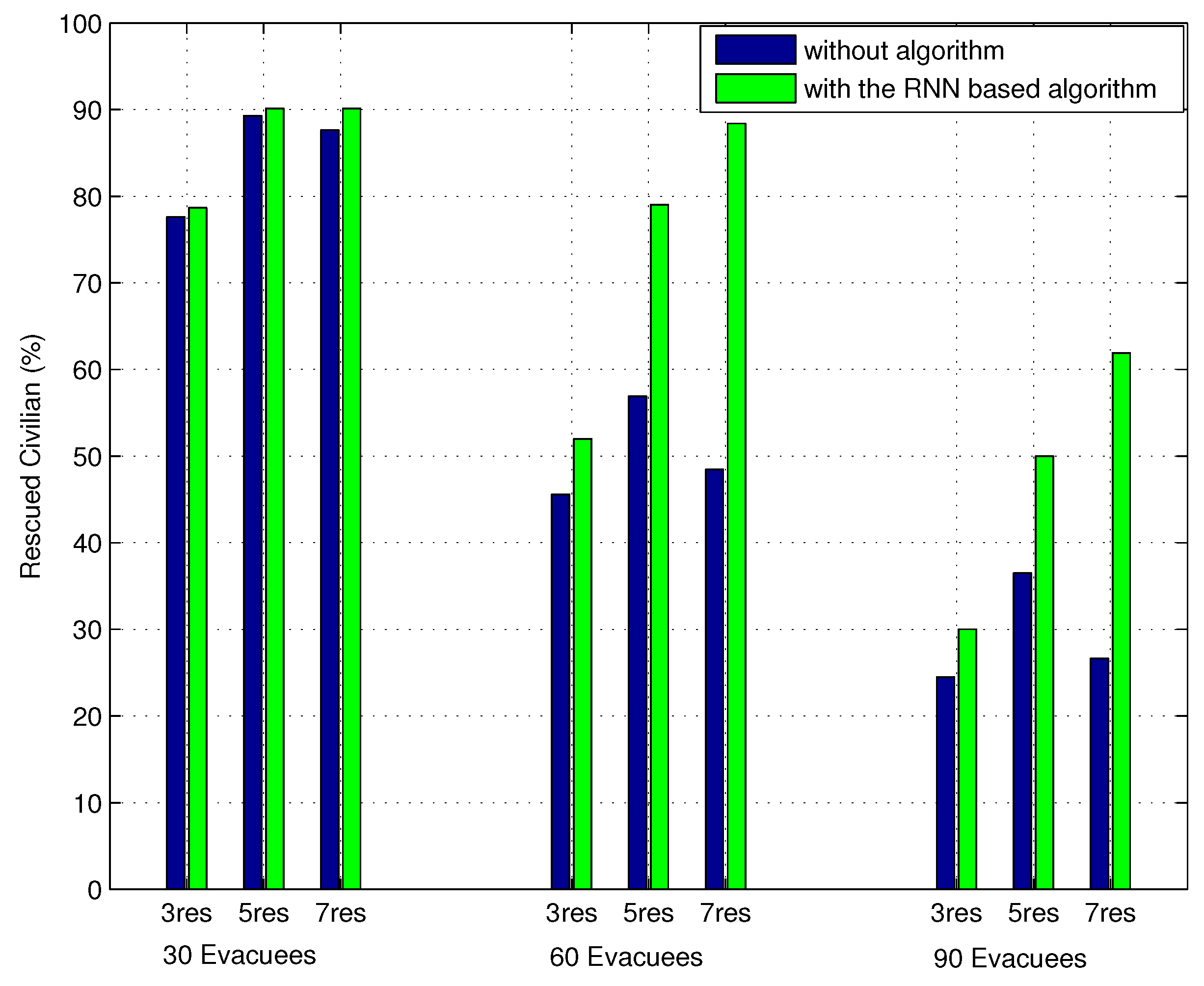
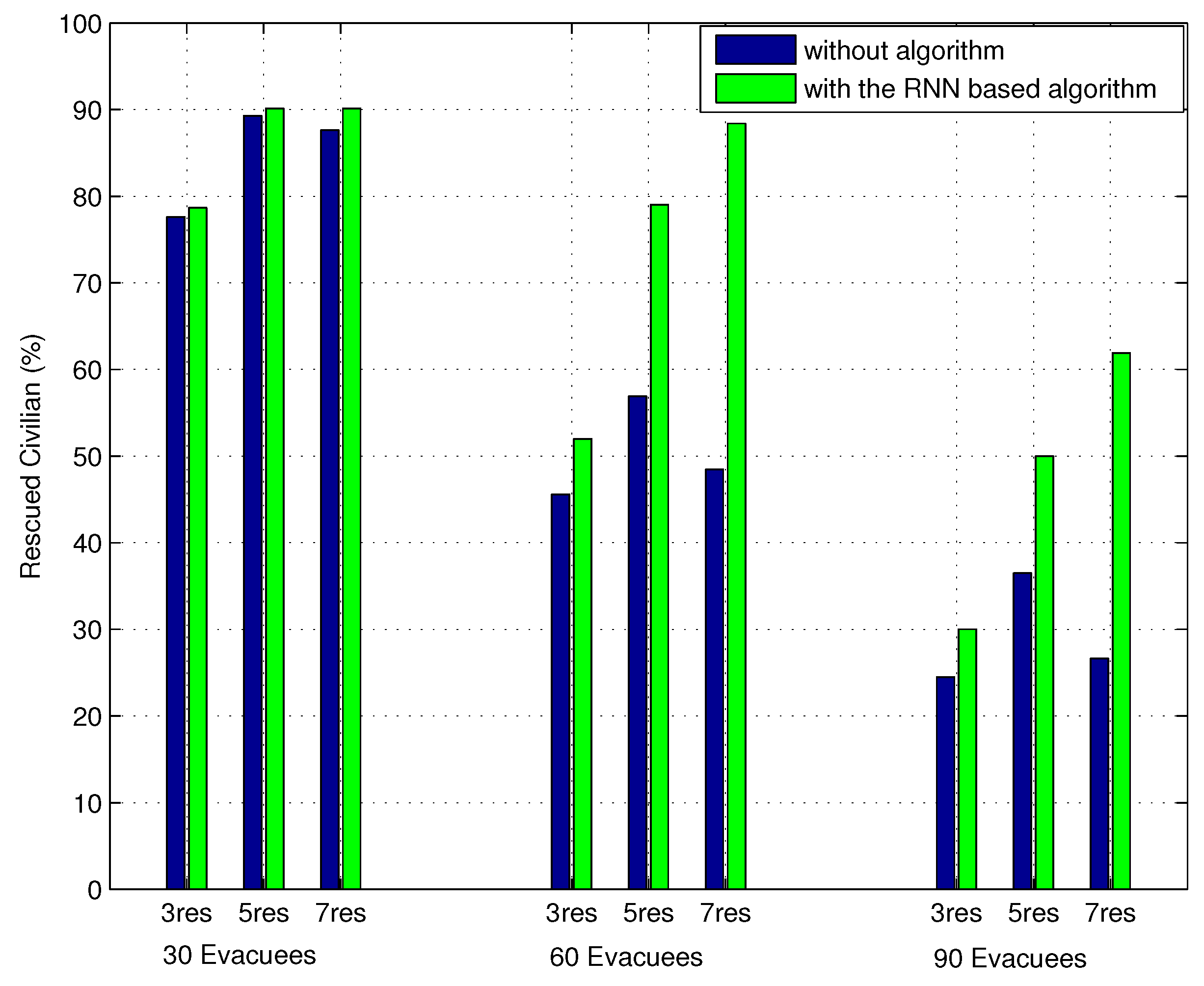
4.3. Performance Evaluation
| No. of rescuers | No. of victims | Without algorithm | With the RNN-based algorithm | Optimal solutions |
|---|---|---|---|---|
| 3 | 4 | 3.00 | 3.80 | 4 |
| 5 | 4 | 3.43 | 4.00 | 4 |
| 7 | 4 | 4.00 | 4.00 | 4 |
| 3 | 8 | 4.71 | 5.75 | 6 |
| 5 | 8 | 6.00 | 7.50 | 8 |
| 7 | 8 | 5.89 | 8.00 | 8 |
| 3 | 16 | 4.88 | 6.00 | 6 |
| 5 | 16 | 7.40 | 9.75 | 10 |
| 7 | 16 | 6.67 | 13.25 | 14 |
| No. of rescuers | No. of victims | Without algorithm | With the RNN-based algorithm |
|---|---|---|---|
| 3 | 4 | 24.00 | 25.25 |
| 5 | 4 | 25.25 | 24.15 |
| 7 | 4 | 24.79 | 24.70 |
| 3 | 8 | 17.40 | 20.67 |
| 5 | 8 | 20.45 | 22.35 |
| 7 | 8 | 18.38 | 23.23 |
| 3 | 16 | 7.89 | 11.10 |
| 5 | 16 | 12.28 | 15.35 |
| 7 | 16 | 8.11 | 18.01 |
5. Conclusions and Future Work
Conflicts of Interest
References
- Li, S.; Zhan, A.; Wu, X.; Yang, P.; Chen, G. Efficient emergency rescue navigation with wireless sensor networks. J. Inf. Sci. Eng. 2011, 27, 51–64. [Google Scholar]
- Filippoupolitis, A.; Gelenbe, E. A Distributed Decision Support System for Building Evacuation. In Proceedings of the 2nd Conference on Human System Interactions, HSI’09, Catania, Italy, 21–23 May 2009; pp. 323–330.
- Gelenbe, E.; Timotheou, S. Random neural networks with synchronised interactions. Neural Comput. 2008, 20, 2308–2324. [Google Scholar] [CrossRef] [PubMed]
- Pentico, D.W. Assignment problems: A golden anniversary survey. Eur. J. Oper. Res. 2007, 176, 774–793. [Google Scholar] [CrossRef]
- Filippoupolitis, A. Emergency Simulation and Decision Support Algorithms. Ph.D. Thesis, University of London and the Diploma of Imperial College, London, UK, October 2010. [Google Scholar]
- Tseng, Y.-C.; Pan, M.-S.; Tsai, Y.-Y. Wireless sensor networks for emergency navigation. IEEE Comput. 2006, 39, 55–62. [Google Scholar] [CrossRef]
- Pan, M.-S.; Tsai, C.-H.; Tseng, Y.-C. Emergency guiding and monitoring applications in indoor 3D environments by wireless sensor networks. Int. J. Sens. Netw. 2006, 1, 2–10. [Google Scholar] [CrossRef]
- Barnes, M.; Leather, H.; Arvind, D.K. Emergency Evacuation Using Wireless Sensor Networks. In Proceedings of the IEEE Conference Local Computer Networks, Dublin, Ireland, 15–18 October 2007; pp. 851–857.
- Tabirca, T.; Brown, K.N.; Sreenan, C.J. A Dynamic Model for Fire Emergency Evacuation Based on Wireless Sensor Networks. In Proceedings of the Parallel and Distributed Computing, Lisbon, Portugal, 30 June–4 July 2009; pp. 29–36.
- Filippoupolitis, A.; Gelenbe, E.; Gianni, D.; Hey, L.; Loukas, G.; Timotheou, S. Distributed Agent-Based Building Evacuation Simulator. In Proceedings of the Summer Computer Simulation Conference, Edinburgh, UK, 16–19 June 2008.
- Dimakis, N.; Filippoupolitis, A.; Gelenbe, E. Distributed building evacuation simulator for smart emergency management. Comput. J. 2010, 53, 1384–1400. [Google Scholar] [CrossRef]
- Smith, J. State-dependent queueing models in emergency evacuation networks. Transp. Res. B 1991, 25, 373–389. [Google Scholar] [CrossRef]
- Desmet, A.; Gelenbe, E. Graph and analytical models for emergency evacuation. Future Internet 2013, 5, 46–55. [Google Scholar] [CrossRef]
- Bi, H.; Desmet, A.; Gelenbe, E. Routing Emergency Evacuees with Cognitive Packet Networks. In Proceedings of the 28th Annual International Symposium on Computer and Information Sciences, ISCIS 2013, Paris, France, 28–29 October, 2013.
- Gelenbe, E. Cognitive Packet Network. U.S. Patent 6,804,201, 11 October 2004. [Google Scholar]
- Gelenbe, E.; Lent, R.; Nunez, A. Self-aware networks and qos. IEEE Proc. 2004, 92, 1478–1489. [Google Scholar] [CrossRef]
- Gelenbe, E. Steps toward self-aware networks. Commun. ACM 2009, 52, 66–75. [Google Scholar] [CrossRef]
- Gorbil, G.; Gelenbe, E. Opportunistic Communications for Emergency Support Systems. In Proceedings of the International Conference Ambient Systems, Networks and Technologies, Niagara Falls, ON, Canada, 19–21 September 2011; pp. 1–9.
- Gelenbe, E.; Cao, Y. Autonomous search for mines. Eur. J. Oper. Res. 1998, 108, 319–333. [Google Scholar] [CrossRef]
- Loukas, G.; Timotheou, S.; Gelenbe, E. Robotic Wireless Network Connection of Civilians for Emergency Response Operations. In Proceedings of the International Symposium Computer and Information Sciences, Istanbul, Turkey, 27–29 October 2008; pp. 1–6.
- Reich, J.; Sklar, E. Robot-Sensor Networks for Search and Rescue. In Proceedings of the IEEE International Workshop Safety, Security and Rescue Robotics, Gaithersburg, MD, USA, 22–25 August 2006.
- Li, X.; Santoro, N.; Stojmenovic, I. Localized distance-sensitive service discovery in wireless sensor and actor networks. IEEE Trans. Comput. 2009, 58, 1275–1288. [Google Scholar]
- Verma, A.; Sawant, H.; Tan, J. Selection and navigation of mobile sensor nodes using a sensor network. Pervasive Mob. Comput. 2006, 2, 65–84. [Google Scholar] [CrossRef]
- Stojmenovic, I.; Liu, D.; Jia, X. A scalable quorum based location service in ad hoc and sensor networks. Int. J. Commun. Netw. Distrib. Syst. 2008, 1, 71–94. [Google Scholar] [CrossRef]
- Wang, Y.-C.; Peng, W.-C.; Chang, M.-H.; Tseng, Y.-C. Exploring Load-Balance to Dispatch Mobile Sensors in Wireless Sensor Networks. In Proceedings of the IEEE International Conference Computer Communication and Networks, Honolulu, HI, USA, 13–16 August 2007; pp. 669–674.
- Li, S.; Zhan, A.; Wu, X.; Chen, G. Ern: Emergence Rescue Navigation with Wireless Sensor Networks. In Proceedings of the 2009 15th International Conference on Parallel and Distributed Systems, ICPADS ’09, Shenzhen, China, 8–11 December 2009; pp. 361–368.
- Gelenbe, E.; Timotheou, S.; Nicholson, D. Fast distributed near-optimum assignment of assets to tasks. Comput. J. 2010, 53, 1360–1369. [Google Scholar] [CrossRef]
- Timotheou, S. The random neural network: A survey. Comput. J. 2010, 53, 251–267. [Google Scholar] [CrossRef]
- Gelenbe, E. Random neural networks with negative and positive signals and product form solution. Neural Comput. 1989, 1, 502–510. [Google Scholar] [CrossRef]
- Gelenbe, E. Stability of the random neural network model. Neural Comput. 1990, 2, 239–247. [Google Scholar] [CrossRef]
- Gelenbe, E.; Mao, Z.; Li, Y. Function approximation with spiked random network. IEEE Trans. Neural Netw. 1999, 10, 3–9. [Google Scholar] [CrossRef] [PubMed]
- Gelenbe, E. Function approximation by random neural networks with a bounded number of layers. J. Differ. Equ. Dyn. Syst. 2004, 12, 143–170. [Google Scholar]
- Gelenbe, E.; Fourneau, J.-M. Random neural networks with multiple classes of signals. Neural Comput. 1999, 11, 953–963. [Google Scholar] [CrossRef] [PubMed]
- Gelenbe, E.; Hussain, K.F. Learning in the multiple class random neural network. IEEE Trans. Neural Netw. 2002, 13, 1257–1267. [Google Scholar] [CrossRef] [PubMed]
- Gelenbe, E.; Timotheou, S. Synchronized interactions in spiked neuronal networks. Comput. J. 2008, 51, 723–730. [Google Scholar] [CrossRef]
- Gelenbe, E.; Sungur, M.; Cramer, C.; Gelenbe, P. Traffic and video quality with adaptive neural compression. Multimed. Syst. 1996, 4, 357–369. [Google Scholar] [CrossRef]
- Gelenbe, E.; Feng, Y.; Krishnan, K.R. Neural network methods for volumetric magnetic resonance imaging of the human brain. IEEE Proc. 1996, 84, 1488–1496. [Google Scholar] [CrossRef]
- Gelenbe, E.; Sakellari, G. Admission of qos aware users in a smart network. ACM Trans. Auton. Adapt. Syst. 2008, 3, 14–28. [Google Scholar] [CrossRef]
- Gelenbe, E.; Loukas, G. A self-aware approach to denial of service defence. Comput. Netw. 2007, 51, 1299–1314. [Google Scholar] [CrossRef]
- Gelenbe, E.; Liu, P.; Laine, J. Genetic algorithms for route discovery. IEEE Trans. Syst. Man Cybern. B 2006, 36, 1247–1254. [Google Scholar] [CrossRef]
- Gelenbe, E.; Koubi, V.; Pekergin, F. Dynamical Random Neural Network Approach to the Travelling Salesman Problem. In Proceedings of the IEEE Symposium Systems, Man and Cybernetics, Le Touquet, France, 17–20 October 1993; Volum 2, pp. 630–635.
- Gelenbe, E.; Ghanwani, A.; Srinivasan, V. Improved neural heuristics for multicast routing. IEEE J. Sel. Areas Commun. 1997, 15, 147–155. [Google Scholar] [CrossRef]
- Timotheou, S. Asset-task assignment algorithms in the presence of execution uncertainty. Comput. J. 2011, 54, 1514–1525. [Google Scholar] [CrossRef]
- Aguilar, J.; Gelenbe, E. Task assignment and transaction clustering heuristics for distributed systems. Inf. Sci. 1997, 97, 199–219. [Google Scholar] [CrossRef]
- Gelenbe, E.; Wu, F.-J. Large scale simulation for human evacuation and rescue. Comput. Math. Appl. 2012, 64, 3869–3880. [Google Scholar] [CrossRef]
- Gelenbe, E. G-networks with triggered customer movement. Appl. Probab. 1993, 30, 742–748. [Google Scholar] [CrossRef]
- Gelenbe, E. Learning in the recurrent random neural network. Neural Comput. 1993, 5, 154–164. [Google Scholar] [CrossRef]
- Fourneau, J.-M. Computing the Steady State Distribution of Networks with Positive and Negative Customers. In Proceedings of the 13th IMACS World Congress on Computational and Applied Mathematics, Dublin, Ireland, 22–26 July 1991.
- Gelenbe, E.; Görbil, G. Opportunistic communications for emergency support systems. Procedia Comput. Sci. 2011, 5, 39–47. [Google Scholar]
© 2013 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Han, Q. Managing Emergencies Optimally Using a Random Neural Network-Based Algorithm. Future Internet 2013, 5, 515-534. https://doi.org/10.3390/fi5040515
Han Q. Managing Emergencies Optimally Using a Random Neural Network-Based Algorithm. Future Internet. 2013; 5(4):515-534. https://doi.org/10.3390/fi5040515
Chicago/Turabian StyleHan, Qing. 2013. "Managing Emergencies Optimally Using a Random Neural Network-Based Algorithm" Future Internet 5, no. 4: 515-534. https://doi.org/10.3390/fi5040515
APA StyleHan, Q. (2013). Managing Emergencies Optimally Using a Random Neural Network-Based Algorithm. Future Internet, 5(4), 515-534. https://doi.org/10.3390/fi5040515