


A UAV Trajectory Optimization and Task Offloading Strategy Based on Hybrid Metaheuristic Algorithm in Mobile Edge Computing

Abstract
1. Introduction
- (1)
- We study the MEC model for receiving data offloaded from multiple ground mobile devices in a single UAV multi-user scenario in 3D space, satisfying the constraints of UAV maneuverability and obstacle avoidance. We propose a joint optimization strategy with maximized energy efficiency (OPMEE) for the UAV flight trajectory and user device task offloading rate.
- (2)
- To solve this problem, hybrid alternating metaheuristics for energy optimization (HAMEO) are given. Firstly, the Dinkelbach method is used to transform the nonlinear fractional programming problem into a corresponding parameter optimization problem. Then, it is divided into two sub-optimization problems, which are alternately optimized using an improved genetic algorithm and the Arctic puffin algorithm.
- (3)
- The experimental results show that the strategy proposed in this paper can enable a UAV to avoid obstacles during flight by detouring or crossing, and the trajectory does not overlap with obstacles, effectively achieving two-dimensional and three-dimensional obstacle avoidance. In addition, compared with related solving methods, the solving method in this paper has significantly higher success than traditional algorithms. In comparison with related optimization strategies, the strategy proposed in this paper can effectively reduce the overall energy consumption of a UAV.
2. Related Works
- (1)
- UAV trajectory optimization. The authors in [6] proposed a reinforcement learning (RL) solution acceleration framework based on an incomplete information communication model and quadcopter UAV energy consumption model, and they designed two responsive UAV trajectory planning algorithms to achieve energy consumption optimization. In [7], the authors proposed a three-layer integrated vehicle networking-based UAV-assisted MEC architecture, which optimizes the trajectory of the UAV, while satisfying the constraints of the evolution law of the vehicle energy consumption state, and maximizes the total system utility. In [8], Lu W. et al. proposed a secure communication scheme for a dual UAV MEC system based on successive convex approximation and block coordinate descent, effectively planning the UAV flight trajectory to maximize the user’s minimum secure computing capability. In [9], Abdel-Basset M. et al. proposed multiple multi-objective trajectory planning algorithms based on metaheuristic algorithms and Pareto optimality theory, which accurately plan the trajectory of UAVs to minimize the energy consumption of data transmission and UAV flight in IoT devices. In [10], the authors considered the deadline for completing tasks for ground users and proposed an offline optimal trajectory design algorithm and an online approximation algorithm suitable for multiple flight scenarios. By optimizing the number of flights and flight trajectories, the energy consumption of UAVs is minimized to the greatest extent possible. A low-complexity UAV trajectory prediction and vehicle selection method is proposed using federated learning, which exploits related information from past trajectories in [11]. In [12], the authors proposed an energy-aware grid-based solution for obstacle avoidance.
- (2)
- Resource scheduling and computation offloading. The authors aimed to minimize the total power and adopted centralized multi-agent algorithms and federated multi-agent RL algorithms to handle resource allocation and power control problems in the system in [13]. In [14], Ren Y. et al. proposed two offloading schemes based on game theory with the objectives of minimizing computation time and energy consumption, and they successfully determined the optimal offloading ratio. Li J. et al. [15] considered the energy limitation of UAVs and proposed a hybrid approach based on semi-Markov decision processes and deep reinforcement learning (DRL) with the goal of maximizing user task transfer throughput. Tian X. Z. et al. [16] aimed to reduce system energy consumption under latency constraints, and they designed a two-layer iterative algorithm based on a genetic algorithm framework to maximize system energy efficiency by optimizing service caching mechanisms, computation offloading strategies, and resource allocation methods. Wang S. et al. [17] proposed a collaborative multi-agent DRL framework that uses Markov decision processes to optimize the computation offloading strategy of UAVs, and they achieved system latency minimization and fairness between ground terminals. Liu Z. R. et al. [18] applied the idea of cooperative transmission to improve channel conditions and maximized computing efficiency (CE) by using reconfigurable intelligent surfaces (RISs) in MEC.
- (3)
- In addition to the research on specific issues mentioned above, there are also many studies that jointly optimize UAV trajectories, resource scheduling, and computation offloading. Hu J. et al. [19] proposed an offloading scheme based on near-end strategy optimization to minimize task processing latency, which synergistically optimizes the flight trajectory, task offloading rate, and communication resource allocation of UAVs. Li W. T. et al. [20] considered delay-sensitive tasks and proposed a solution scheme based on the block coordinate descent method to jointly optimize the UAV trajectory, resource allocation, and offloading decisions, which minimized the total energy consumption of the equipment. In [21], UAVs were used as air data relays, and a heuristic algorithm based on particle swarm optimization was proposed to minimize the execution time of user offloading tasks by jointly optimizing the UAV’s task scheduling and flight trajectory. Yang Z. et al. [22] proposed a UAV-assisted edge computing framework based on artificial intelligence and non-orthogonal multiple access, which minimized transmission delay and power consumption by jointly optimizing UAV deployment and resource allocation. Zhang Y. et al. [23] proposed a joint dynamic programming and bidding algorithm with the goal of maximizing the minimum secure computing capability of dynamic end users, through joint optimization of UAV offloading decisions, resource allocation, and trajectory planning. Zeng Y. P. et al. [24] proposed a two-stage dynamic optimization method based on Lyapunov optimization theory, which minimized the comprehensive energy consumption of the system by jointly optimizing task offloading, communication resource allocation, and the UAV 3D trajectory. Chen Y. et al. [25] propose a solution based on deep reinforcement learning for the optimization of UAV trajectories and resource allocation problems, which minimizes the energy consumption of mobile users under the constraints of system performance and UAV energy. Pervez F. et al. [26] proposed an alternating iterative method based on block descent in a multi-UAV-assisted network, which minimized the cost function based on energy and delay by jointly optimizing task offloading and MEC server selection decisions, transmission power, flight trajectory, and CPU frequency allocation.
- (1)
- Most of the above studies are based on the premise that user devices are in the same plane, UAVs are flying at a fixed altitude, and the scene environment is naturally open. However, in the practical application of UAV-assisted edge computing, especially in complex scenes such as emergency rescue, the environmental conditions are complex and changeable, and key factors such as obstacles and user positions in 3D space need to be further considered.
- (2)
- The current research on performance indicators mainly focuses on latency, throughput, power, flight time, and energy consumption, and most of them are single or simply weighted. To improve system performance, the intrinsic correlation between multiple performance indicators in the MEC model can be comprehensively considered and jointly optimized.
- (3)
- Although traditional convex optimization methods are effective in simplifying models, the number of system variables increases and the complexity of the problem significantly increases in large-scale application scenarios. At this point, traditional convex optimization methods will no longer be applicable, and more advantageous metaheuristic algorithms can be considered for the solution.
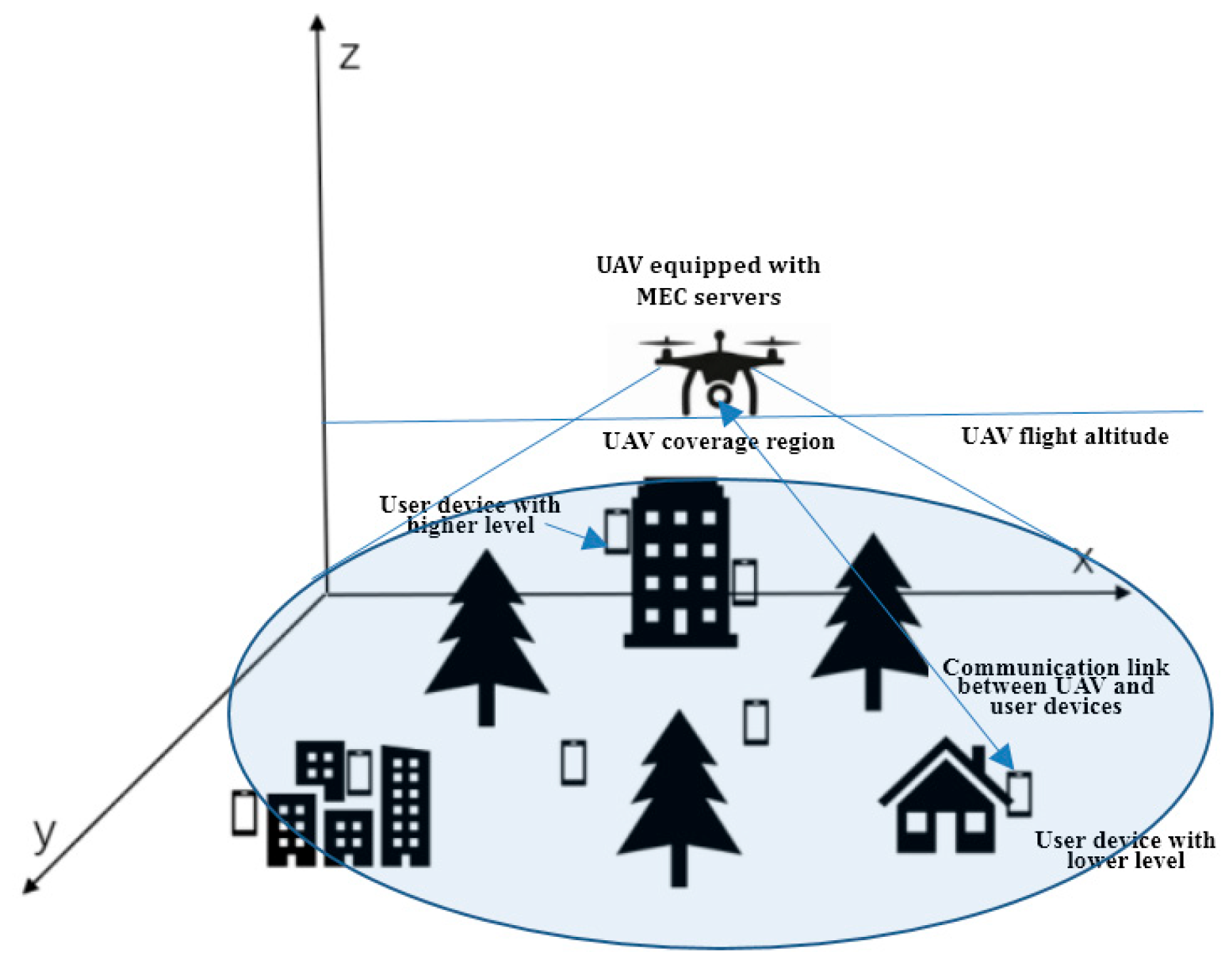
3. System Model and Problem Description
3.1. Network Model
3.2. Communication Model
3.3. Offloading Model
3.4. Energy Consumption Model
3.5. Problem Definition
4. Optimization Problem Solving
4.1. Task Offloading Optimization for User Device
- (1)
- Design of fitness function
- (2)
- Encoding and population initialization
- (3)
- Genetic manipulation design
- (4)
- Constraint handling and computation acceleration
4.2. UAV Trajectory Optimization Problem
- (1)
- Design of fitness function
- (2)
- Population initialization
- (3)
- Aerial flight phase
- (4)
- Underwater foraging stage
4.3. Joint Optimization Algorithm Design
- (1)
- Algorithm design
| Algorithm 1: Hybrid Alternating Metaheuristics for Energy Optimization (HAMEO) |
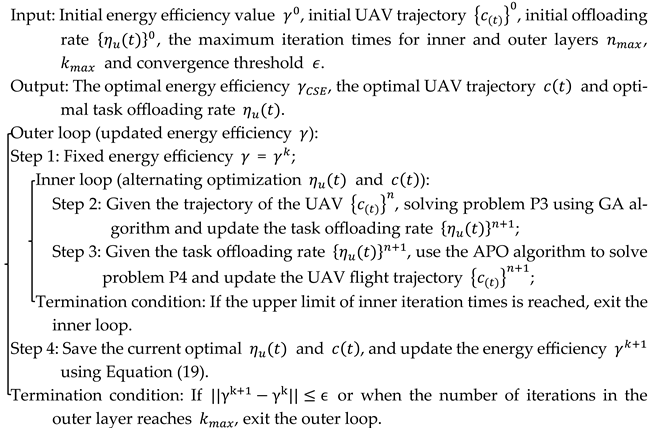 |
- (2)
- Complexity analysis
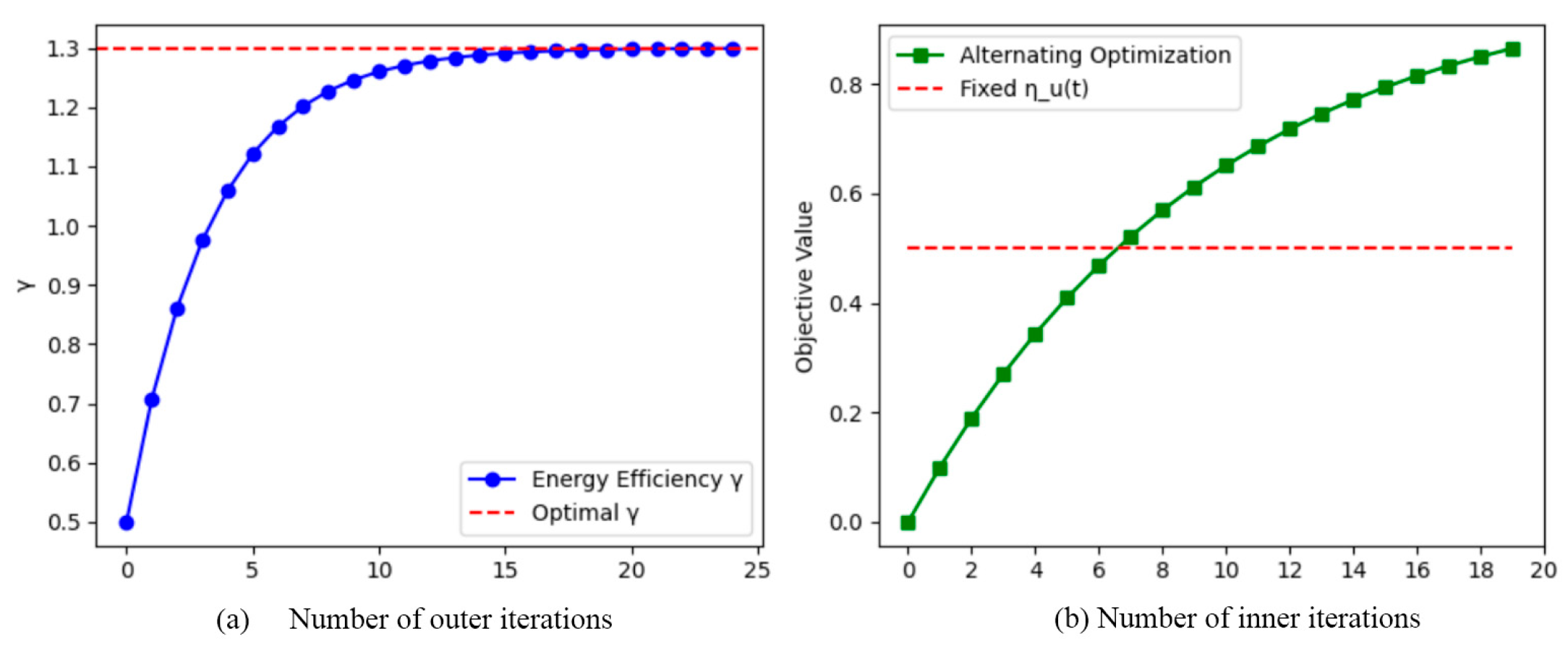
- (3)
- Convergence analysis
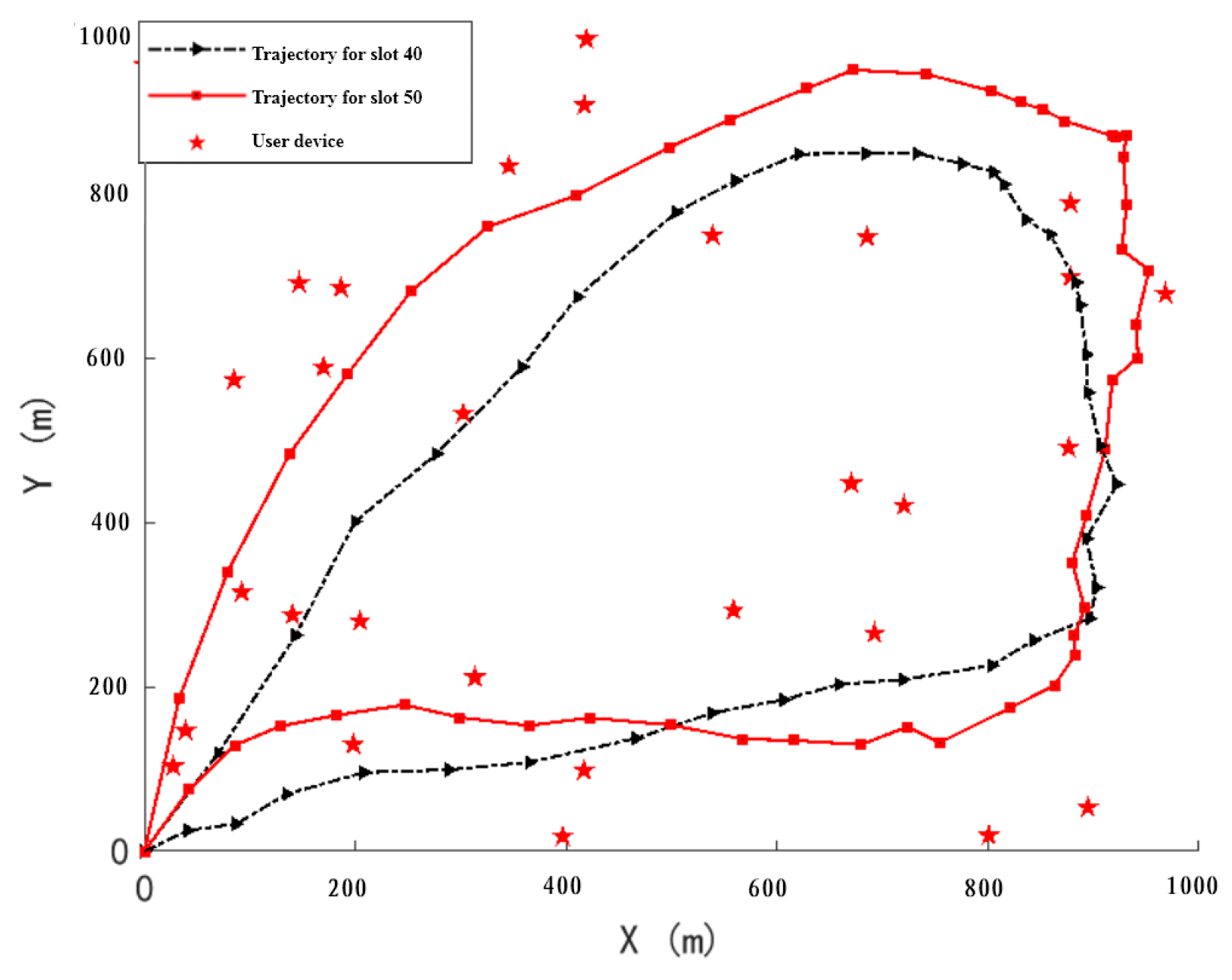
5. Experimental Results and Analysis
5.1. UAV Trajectory Analysis
5.2. Performance Analysis
- (1)
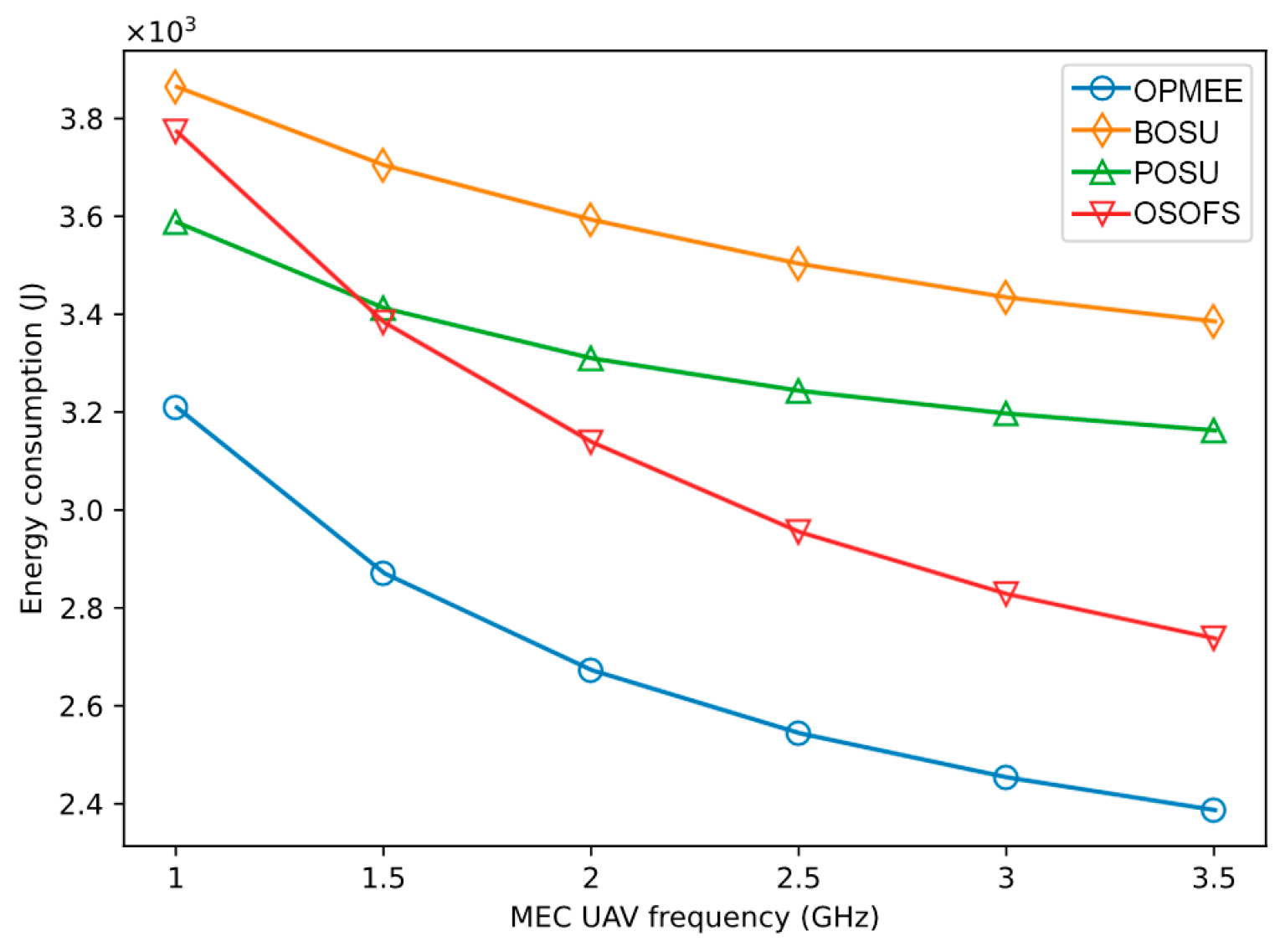
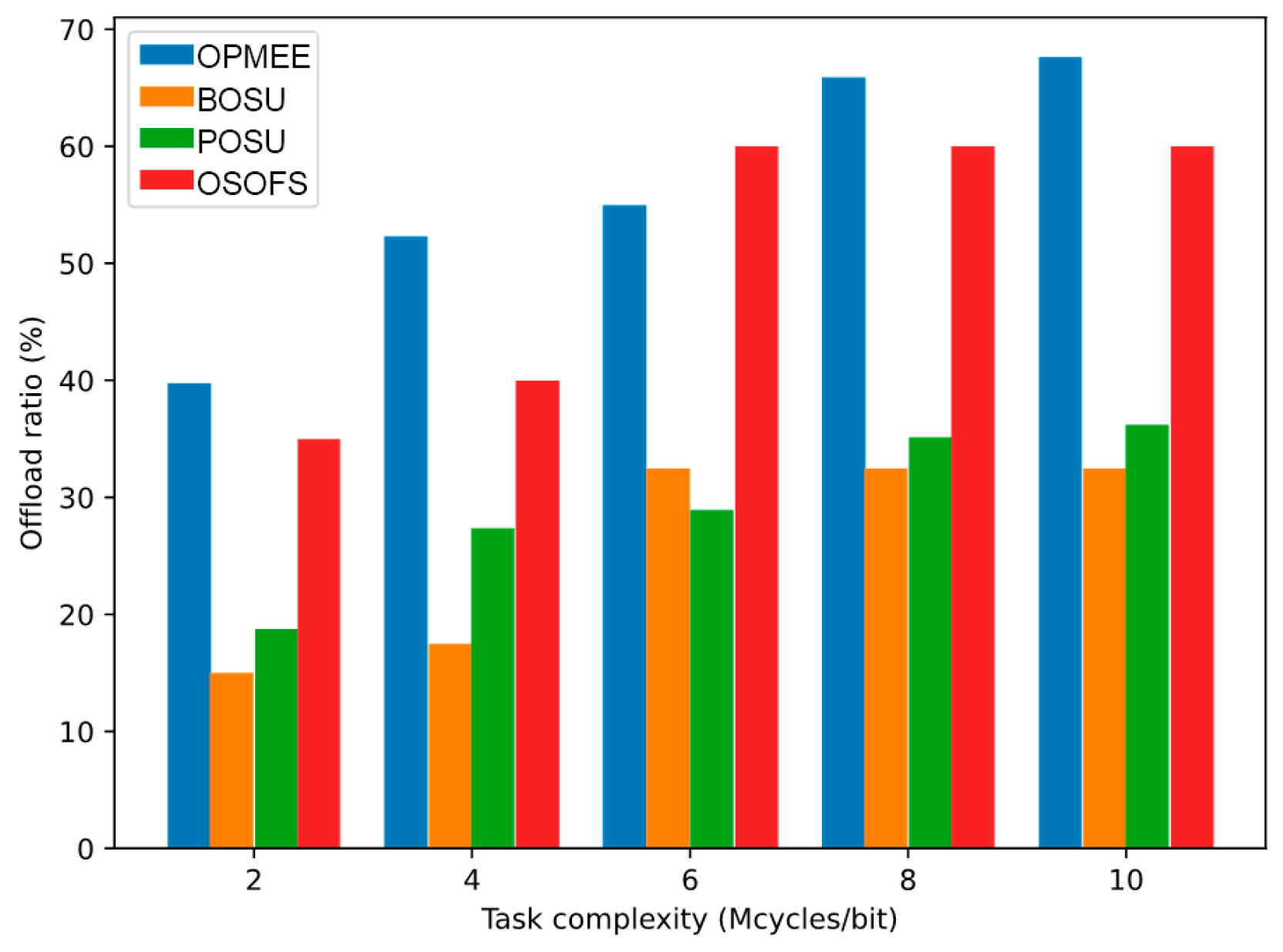
- Optimal Service Order and Flight Speed (OSOFS) [10]: A two-stage optimization algorithm is proposed to minimize the energy consumption of a single UAV-assisted MEC system during each flight.
- (2)
- Binary Offloading with Single UAV MEC (BOSU) [33]: A single UAV-assisted MEC is used to provide computing resources, where all user tasks are either executed on the user device or offloaded to the UAV MEC for execution, and the UAV flies according to the designed UAV trajectory.
- (3)
- Partial Offloading with Single UAV MEC (POSU) [34]: The user’s task can be divided into two parts, using the user device and UAV-assisted MEC to complete the computation with a given UAV trajectory.
6. Conclusions and Further Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cai, Q.; Zhou, Y.; Liu, L.; Qi, Y.; Pan, Z.; Zhang, H. Collaboration of Heterogeneous Edge Computing Paradigms: How to Fill the Gap Between Theory and Practice. IEEE Wirel. Commun. 2024, 31, 110–117. [Google Scholar] [CrossRef]
- Zhou, Y.; Liu, L.; Wang, L.; Hui, N.; Cui, X.; Wu, J.; Peng, Y.; Qi, Y.; Xing, C. Service Aware 6G: An Intelligent and Open Network Based on Convergence of Communication, Computing and Caching. Digit. Commun. Netw. 2020, 6, 253–260. [Google Scholar] [CrossRef]
- Cao, K.; Liu, Y.; Meng, G.; Sun, Q. An overview on edge computing research. IEEE Access 2020, 8, 85714–85728. [Google Scholar] [CrossRef]
- Taleb, T.; Samdanis, K.; Mada, B.; Flinck, H.; Dutta, S.; Sabella, D. On multi-access edge computing: A survey of the emerging 5G network edge cloud architecture and orchestration. IEEE Commun. Surv. Tutor. 2017, 19, 1657–1681. [Google Scholar] [CrossRef]
- Luo, J.; Wang, Z.; Xia, M.; Wu, L.; Tian, Y.; Chen, Y. Path planning for UAV communication networks: Related technologies, solutions, and opportunities. ACM Comput. Surv. 2023, 55, 193. [Google Scholar] [CrossRef]
- Huang, J.; Wu, B.; Duan, Q.; Dong, L.; Yu, S. A fast UAV trajectory planning framework in RIS-assisted communication systems with accelerated learning via multithreading and federating. IEEE Trans. Mob. Comput. 2025, 1–16. [Google Scholar] [CrossRef]
- Zhang, L.; Zhao, Z.; Wu, Q.; Zhao, H.; Xu, H.; Wu, X. Energy-aware dynamic resource allocation in UAV-assisted mobile edge computing over social internet of vehicles. IEEE Access 2018, 6, 56700–56715. [Google Scholar] [CrossRef]
- Lu, W.; Ding, Y.; Gao, Y.; Hu, S.; Wu, Y.; Zhao, N.; Gong, Y. Resource and trajectory optimization for secure communications in dual unmanned aerial vehicle mobile edge computing systems. IEEE Trans. Ind. Inform. 2021, 18, 2704–2713. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Mohamed, R.; Hezam, I.M.; Sallam, K.M.; Foul, A.; Hameed, I.A. Multiobjective trajectory optimization algorithms for solving multi-UAV-assisted mobile edge computing problem. J. Cloud Comput. 2024, 13, 35. [Google Scholar] [CrossRef]
- Ye, W.; Zhao, L.; Zhou, J.; Xu, S.; Xiao, F. Energy-Efficient Flight Scheduling and Trajectory Optimization in UAV-Aided Edge Computing Networks. IEEE Trans. Netw. Sci. Eng. 2024, 11, 4591–4602. [Google Scholar] [CrossRef]
- Fernando, X.; Gupta, A. UAV Trajectory Control and Power Optimization for Low-Latency C-V2X Communications in a Federated Learning Environment. Sensors 2024, 24, 8186. [Google Scholar] [CrossRef]
- Ghaddar, A.; Merei, A. EAOA: Energy-Aware Grid-Based 3D-Obstacle Avoidance in Coverage Path Planning for UAVs. Future Internet 2020, 12, 29. [Google Scholar] [CrossRef]
- Nie, Y.; Zhao, J.; Gao, F.; Yu, F.R. Semi-distributed resource management in UAV-aided MEC systems: A multi-agent federated reinforcement learning approach. IEEE Trans. Veh. Technol. 2021, 70, 13162–13173. [Google Scholar] [CrossRef]
- Ren, Y.; Xie, Z.; Ding, Z.; Sun, X.; Xia, J.; Tian, Y. Computation offloading game in multiple unmanned aerial vehicle-enabled mobile edge computing networks. IET Commun. 2021, 15, 1392–1401. [Google Scholar] [CrossRef]
- Li, J.; Liu, Q.; Wu, P.; Shu, F.; Jin, S. Task offloading for UAV-based mobile edge computing via deep reinforcement learning. In Proceedings of the 2018 IEEE/CIC International Conference on Communications in China (ICCC), Beijing, China, 16–18 August 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 798–802. [Google Scholar]
- Tian, X.Z.; Min, X.; Zhou, L. UAV-enabled Service Caching Edge Computing Optimal Computation Offloading and Resource Allocation Strategy. J. Chin. Comput. Syst. 2023, 44, 1557–1562. [Google Scholar]
- Wang, S.; Song, X.; Song, T.; Yang, Y. Fairness-aware computation offloading with trajectory optimization and phase-shift design in RIS-assisted multi-UAV MEC network. IEEE Internet Things J. 2024, 11, 20547–20561. [Google Scholar] [CrossRef]
- Liu, Z.; Li, Z.; Gong, Y.; Wu, Y.-C. RIS-Aided Cooperative Mobile Edge Computing: Computation Efficiency Maximization via Joint Uplink and Downlink Resource Allocation. IEEE Trans. Wirel. Commun. 2024, 23, 11535–11550. [Google Scholar] [CrossRef]
- Hu, J.; Lin, J.; Li, Z.Q.; Xu, Y.L.; Zhang, S. UAV-assisted mobile edge computing based on proximal policy optimization. Comput. Eng. Des. 2025, 46, 974–982. [Google Scholar]
- WLi, T.; Zhao, M.; Wu, Y.-H.; Yu, J.-J.; Bao, L.-Y.; Yang, H.; Liu, D. Collaborative offloading for UAV-enabled time-sensitive MEC networks. EURASIP J. Wirel. Commun. Netw. 2021, 2021, 1. [Google Scholar]
- Zhang, B.; Zhang, G.; Ma, S.; Yang, K.; Wang, K. Efficient Multitask Scheduling for Completion Time Minimization in UAV-Assisted Mobile Edge Computing. Mob. Inf. Syst. 2020, 2020, 8791030. [Google Scholar] [CrossRef]
- Yang, Z.; Chen, M.; Liu, X.; Liu, Y.; Chen, Y.; Cui, S.; Poor, H.V. AI-driven UAV-NOMA-MEC in next generation wireless networks. IEEE Wirel. Commun. 2021, 28, 66–73. [Google Scholar] [CrossRef]
- Zhang, Y.; Kuang, Z.; Feng, Y.; Hou, F. Task offloading and trajectory optimization for secure communications in dynamic user Multi-UAV MEC systems. IEEE Trans. Mob. Comput. 2024, 23, 14427–14440. [Google Scholar] [CrossRef]
- Zeng, Y.P.; Xia, Y.T.; Jiang, W.W.; Liu, Y.Q. Research on UAV-Assisted Mobile Edge Computing Strategy with Weighted Energy Minimization. Comput. Eng. 2024, 50, 288–297. [Google Scholar]
- Chen, Y.; Yang, Y.; Wu, Y.; Huang, J.; Zhao, L. Joint trajectory optimization and resource allocation in UAV-MEC systems: A lyapunov-assisted DRL approach. IEEE Trans. Serv. Comput. 2025, 18, 854–867. [Google Scholar] [CrossRef]
- Pervez, F.; Sultana, A.; Yang, C.; Zhao, L. Energy and latency efficient joint communication and computation optimization in a multi-UAV-assisted MEC network. IEEE Trans. Wirel. Commun. 2023, 23, 1728–1741. [Google Scholar] [CrossRef]
- Wu, Q.H.; Wu, W. Algorithm design on energy efficiency maximization for UAV-assisted edge computing. J. Commun. 2020, 41, 15–24. [Google Scholar]
- Guerekata, G.M.N.; Verma, R.U. Generalized Fractional Programming; Nova Science Publishers: New York, NY, USA, 2017. [Google Scholar]
- Wang, W.-C.; Tian, W.-C.; Xu, D.-M.; Zang, H.-F. Arctic puffin optimization: A bio-inspired metaheuristic algorithm for solving engineering design optimization. Adv. Eng. Softw. 2024, 195, 103694. [Google Scholar] [CrossRef]
- Xu, H.; Niu, Z.; Jiang, B.; Zhang, Y.; Chen, S.; Li, Z.; Gao, M.; Zhu, M. ERRT-GA: Expert Genetic Algorithm with Rapidly Exploring Random Tree Initialization for Multi-UAV Path Planning. Drones 2024, 8, 367. [Google Scholar] [CrossRef]
- Zhang, C.; Hu, C.; Feng, J.; Liu, Z.; Zhou, Y.; Zhang, Z. A self-heuristic ant-based method for path planning of unmanned aerial vehicle in complex 3-D space with dense U-type obstacles. IEEE Access 2019, 7, 150775–150791. [Google Scholar] [CrossRef]
- Li, Y.; Gao, A.; Li, H.; Li, L. An improved whale optimization algorithm for UAV swarm trajectory planning. Adv. Contin. Discret. Models 2024, 2024, 40. [Google Scholar] [CrossRef]
- Guo, H.; Liu, J. UAV-Enhanced Intelligent Offloading for Internet of Things at the Edge. IEEE Trans. Ind. Inform. 2020, 16, 2737–2746. [Google Scholar] [CrossRef]
- Hua, M.; Wang, Y.; Li, C.; Huang, Y.; Yang, L. UAV-Aided Mobile Edge Computing Systems with One by One Access Scheme. IEEE Trans. Green Commun. Netw. 2019, 3, 664–678. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Value |
|---|---|---|
| D | Range | 1000 m × 1000 m × 50 m |
| Period duration | 70 s | |
| N | Number of time slots | 40 |
| Average channel gain at 1 m | −50 dB | |
| Noise | −100 dBm | |
| Signal-to-noise ratio difference | 8.2 dB | |
| α | Path loss parameter | 2 |
| Bandwidth | 1 MHz | |
| Device transmission power | 30 dBm | |
| Amount of data offloading by the device | [1, 10] Mbit | |
| CPU cycle required for unit bit data | cycles/bit | |
| M | UAV payload | 5 kg |
| Maximum speed of UAV | 20 m/s | |
| Maximum acceleration of UAV | 5 m/ | |
| UAV computing capability | 1 GHz | |
| ψ | UAV capacitance coefficient |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, Y.; Li, A.; Wen, Y.; Wang, G. A UAV Trajectory Optimization and Task Offloading Strategy Based on Hybrid Metaheuristic Algorithm in Mobile Edge Computing. Future Internet 2025, 17, 300. https://doi.org/10.3390/fi17070300
Zheng Y, Li A, Wen Y, Wang G. A UAV Trajectory Optimization and Task Offloading Strategy Based on Hybrid Metaheuristic Algorithm in Mobile Edge Computing. Future Internet. 2025; 17(7):300. https://doi.org/10.3390/fi17070300
Chicago/Turabian StyleZheng, Yeqiang, An Li, Yihu Wen, and Gaocai Wang. 2025. "A UAV Trajectory Optimization and Task Offloading Strategy Based on Hybrid Metaheuristic Algorithm in Mobile Edge Computing" Future Internet 17, no. 7: 300. https://doi.org/10.3390/fi17070300
APA StyleZheng, Y., Li, A., Wen, Y., & Wang, G. (2025). A UAV Trajectory Optimization and Task Offloading Strategy Based on Hybrid Metaheuristic Algorithm in Mobile Edge Computing. Future Internet, 17(7), 300. https://doi.org/10.3390/fi17070300