

Heuristic Fuzzy Approach to Traffic Flow Modelling and Control on Urban Networks




Abstract
1. Introduction
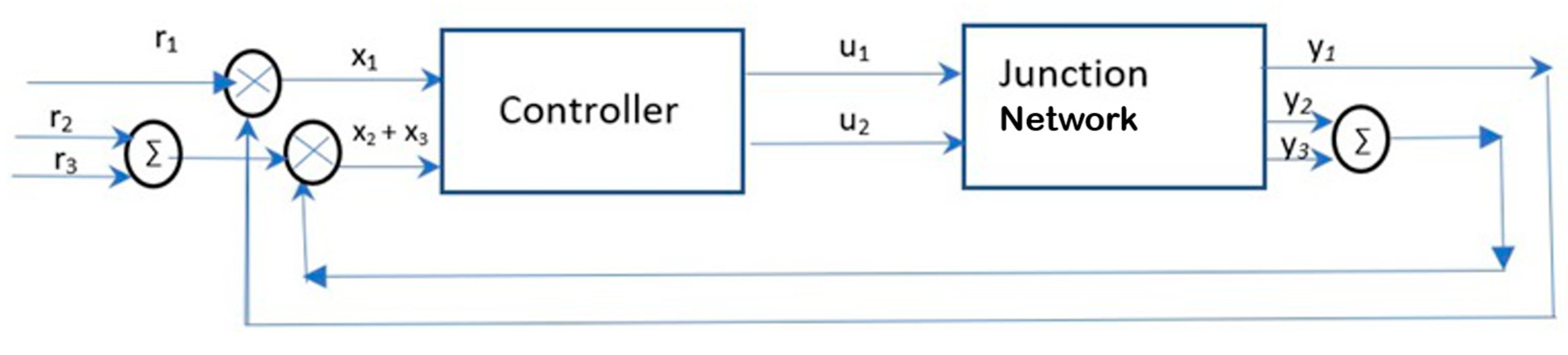
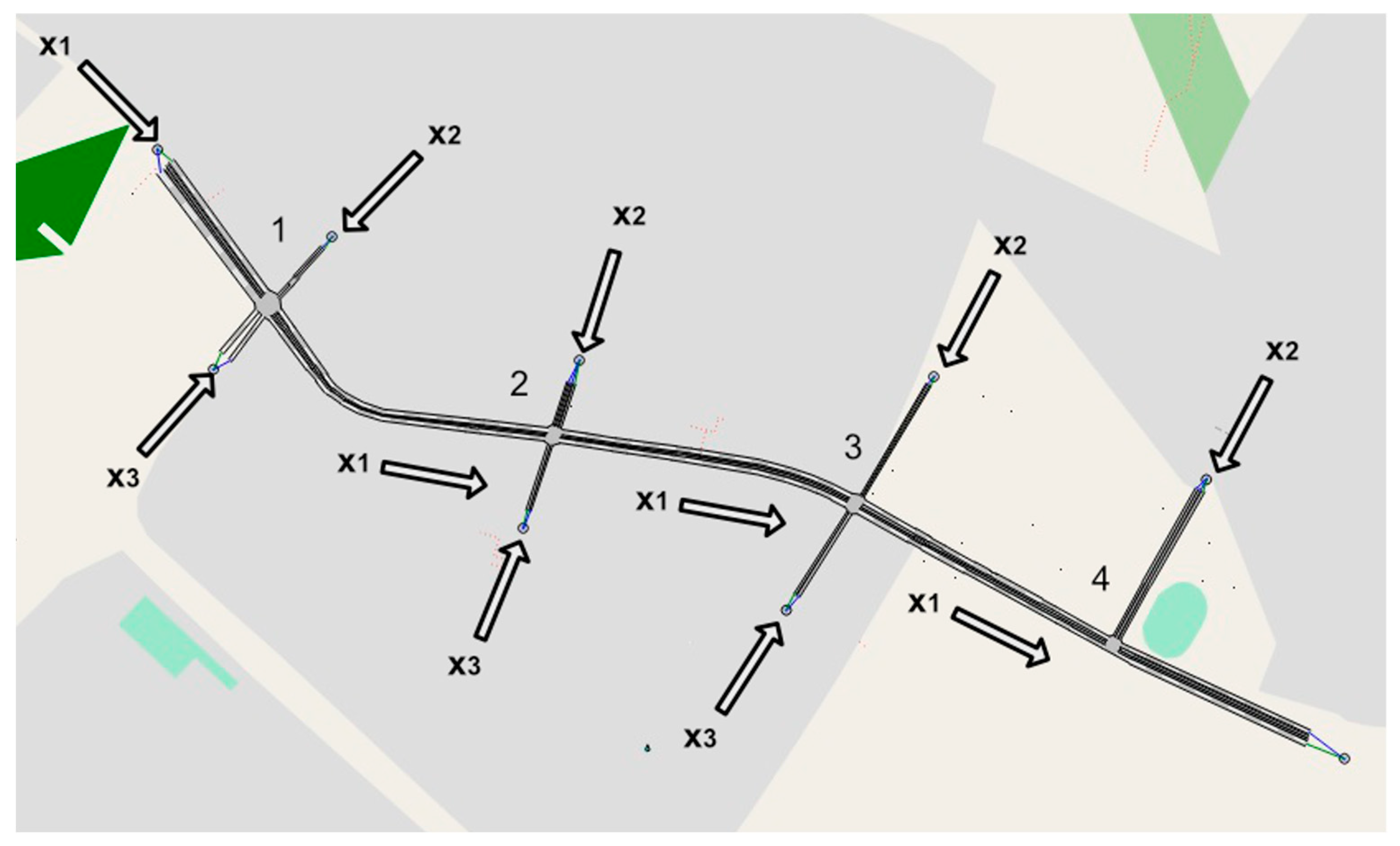
2. Problem Description
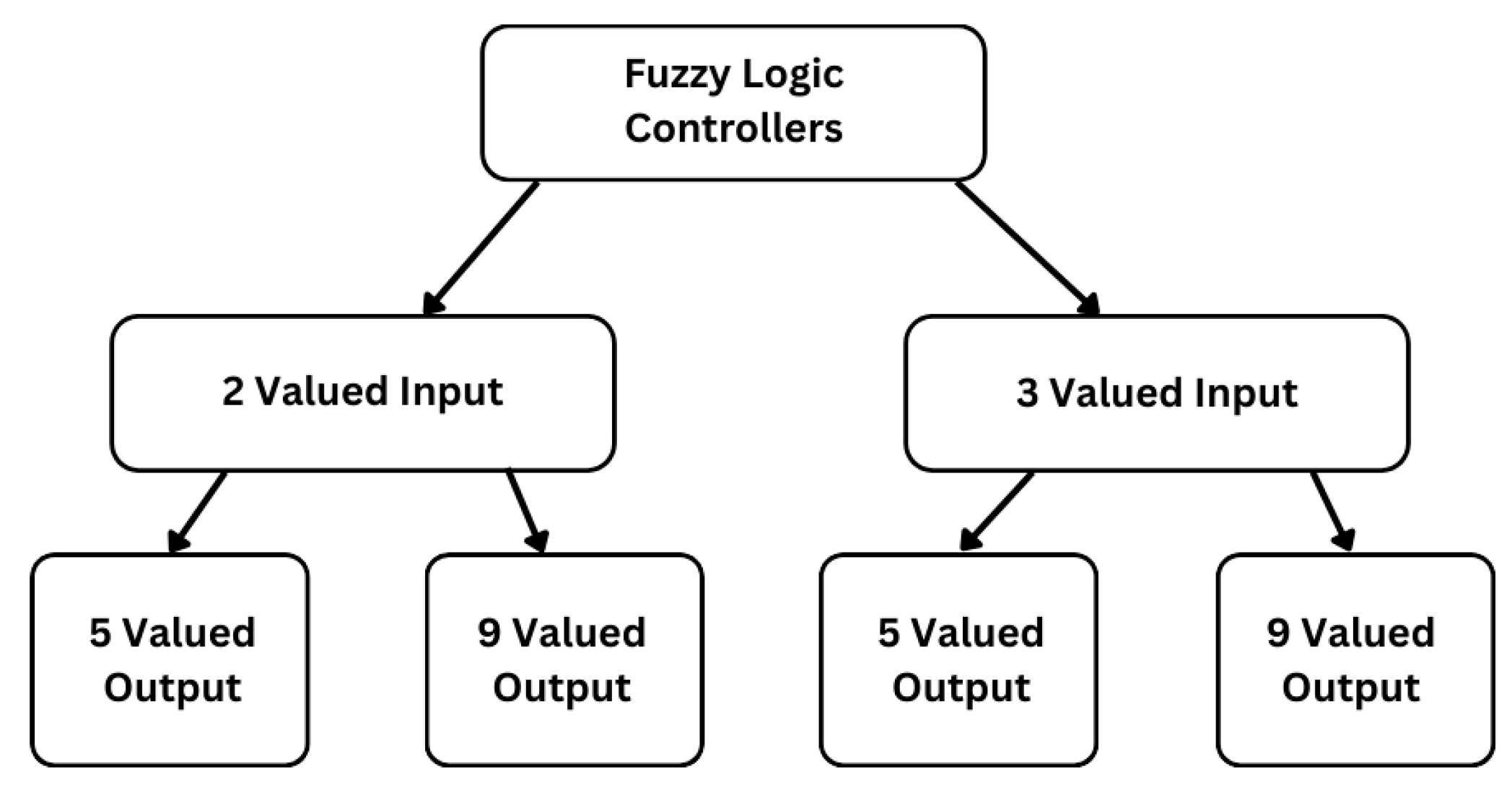
3. Fuzzy Controller Design
- 3.1.
- Two-valued logic for the inputs and five-valued logic for the output;
- 3.2.
- Two-valued logic for the inputs and nine-valued logic for the output;
- 3.3.
- Three-valued logic for the inputs and five-valued logic for the output;
- 3.4.
- Three-valued logic for the inputs and nine-valued logic for the output.
3.1. Fuzzy Controller Design Using Two-Valued Logic for the Inputs and Five-Valued Logic for the Output
- If (numbercars1 is short) and (numbercars2 is short) and (numbercars3 is short), then (greenlight1) is average.
- If (numbercars1 is short) and (numbercars2 is short) and (numbercars3 is long), then (greenlight1 is short).
- If (numbercars1 is short) and (numbercars2 is long) and (numbercars3 is short), then (greenlight1 is very short).
- If (numbercars1 is short), (numbercars2 is long) and (numbercars3 is long), then (greenlight1 is very short).
- If (numbercars1 is long) and (numbercars2 is short) and (numbercars3 is short), then (greenlight1 is very long).
- If (numbercars1 is long) and (numbercars2 is short) and (numbercars3 is long) then (the greenlight1 is long).
- If (numbercars1 is long) and (numbercars2 is long) and (numbercars3 is short), then (greenlight1 is long).
- If (numbercars1 is long) and (numbercars2 is long) and (numbercars3 is long), then (greenlight1 is average).
- If (numbercars1 is short) and (numbercars2 is short), then (greenlight1) is long.
- If (numbercars1 is short) and (numbercars2 is long), then (greenlight1 is medium).
- If (numbercars1 is long) and (numbercars2 is short), then (greenlight1 is very short).
- If (numbercars1 is long) and (numbercars2 is long), then (greenlight1 is short).
3.2. Fuzzy Controller Using Two-Valued Logic for the Inputs and Nine-Valued Logic for the Output
3.3. Design of the Fuzzy Controller Using Three-Valued Logic for the Inputs and Five-Valued Logic for the Outputs
3.4. Design of the Fuzzy Controller Using Three-Valued Logic for the Inputs and Nine-Valued Logic for the Outputs
4. Classical Controller Design
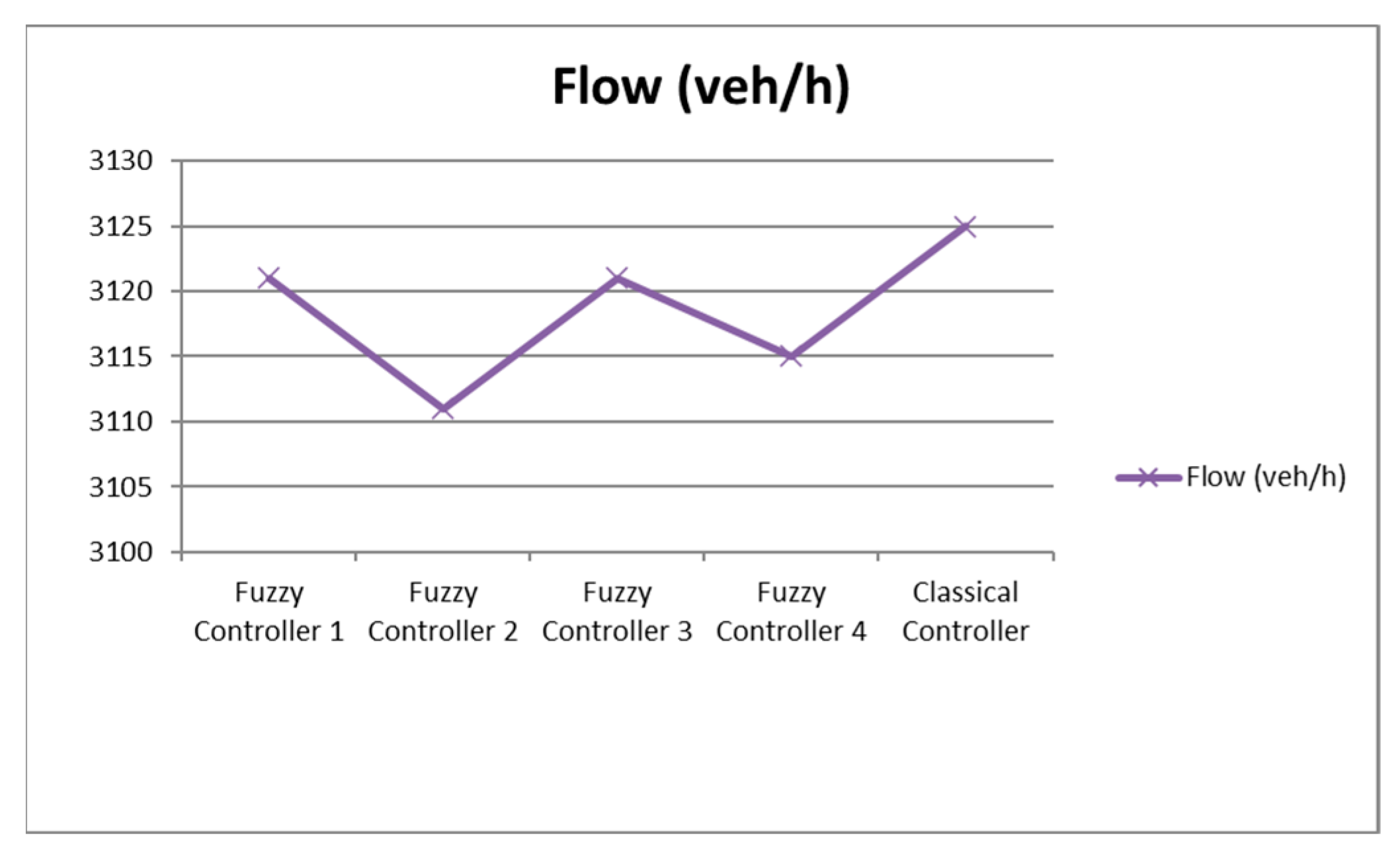
5. Simulation Results
- Fuzzy Controller 1: two-valued logic input with five-valued logic output;
- Fuzzy Controller 2: two-valued logic input with nine-valued logic output;
- Fuzzy Controller 3: three-valued logic input with five-valued logic output;
- Fuzzy Controller 4: three-valued logic input with nine-valued logic output.
- Classical Controller
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Guo, Y.; Zhang, K.; Chen, X.; Li, M. Proactive Coordination of Traffic Guidance and Signal Control for a Divergent Network. Mathematics 2023, 11, 4262. [Google Scholar] [CrossRef]
- Elbaum, Y.; Novoselsky, A.; Kagan, E. A Queueing Model for Traffic Flow Control in the Road Intersection. Mathematics 2022, 10, 3997. [Google Scholar] [CrossRef]
- Stoilova, K.; Stoilov, T. Optimizing Traffic Light Green Duration Under Stochastic Considerations. Mathematics 2023, 11, 496. [Google Scholar] [CrossRef]
- Papageorgiou, M.; Diakaki, C.; Dinopoulou, V.; Kotsialos, A.; Wang, Y. Review of road traffic control strategies. Proc. IEEE 2003, 91, 2043–2067. [Google Scholar] [CrossRef]
- Qadri, S.S.S.M.; Gökçe, M.A.; Öner, E. State-of-art review of traffic signal control methods: Challenges and opportunities. Eur. Transp. Res. Rev. 2020, 12, 55. [Google Scholar] [CrossRef]
- Schweizer, J.; Poliziani, C.; Rupi, F.; Morgano, D.; Magi, M. Building a large-scale micro-simulation transport scenario using big data. ISPRS Int. J. Geo-Inf. 2021, 10, 165. [Google Scholar] [CrossRef]
- Huang, R.; Han, L.D.; Huang, Z. A new network equilibrium flow model: User-equilibrium with quantity adjustment. Transp. Res. Part E Logist. Transp. Rev. 2022, 163, 102719. [Google Scholar] [CrossRef]
- Ameli, M.; Lebacque, J.P.; Leclercq, L. Improving traffic network performance with road banning strategy: A simulation approach comparing user equilibrium and system optimum. Simul. Model. Pract. Theory 2020, 99, 101995. [Google Scholar] [CrossRef]
- Wardrop, J.G. Some Theoretical Aspects of Road Traffic Research. Proc. Inst. Civ. Eng. 1952, 1, 325–362. [Google Scholar] [CrossRef]
- Pavlova, K.; Stoilov, T.; Stoilova, K. Bi-level model for public rail transportation under incomplete data. J. Cybern. Inf. Technol. 2017, 17, 75–91. [Google Scholar] [CrossRef]
- Trichkova-Kashamova, E. Modeling and optimization of traffic flows in a network. In Proceedings of the International Conference Automatics and Informatics—ICAI, Varna, Bulgaria, 1–3 October 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Lu, J.; Chen, F.; Ma, V. Signal Timing for an Isolated Intersection Based on the Two-Stage Fuzzy Logic Controller. Adv. Eng. Res. 2018, 127, 111–114. [Google Scholar] [CrossRef]
- Murat, S.Y.; Gedizlioglu, E. A fuzzy logic multi-phased signal control model for isolated junctions. Transp. Res. Part C Emerg. Technol. 2005, 13, 19–36. [Google Scholar] [CrossRef]
- Rahmani, A.M.; Naqvi, R.A.; Yousefpoor, E.; Yousefpoor, M.S.; Ahmed, O.H.; Hosseinzadeh, M.; Siddique, K. A Q-Learning and Fuzzy Logic-Based Hierarchical Routing Scheme in the Intelligent Transportation System for Smart Cities. Mathematics 2022, 10, 4192. [Google Scholar] [CrossRef]
- Lee, J.-H.; Lee, K.M.; Lee-Kwang, H. Fuzzy controller for intersection group. In Proceedings of the IEEE Conference on Industrial Automation and Control Emerging Technology Applications, Taipei, Taiwan, 22–27 May 1995; IEEE: Piscataway, NJ, USA, 2002; pp. 376–382. [Google Scholar] [CrossRef]
- Yulianto, B. Application of fuzzy logic to traffic signal control under mixed traffic conditions. Traffic Eng. Control 2003, 44, 332–336. Available online: https://www.researchgate.net/publication/293358870_Application_of_fuzzy_logic_to_traffic_signal_control_under_mixed_traffic_conditions (accessed on 1 March 2025).
- Almadi, A.I.M.; Mamlook, R.E.; Almarhabi, Y.; Ullah, I.; Jamal, A.; Bandara, N. A fuzzy-logic approach based on driver decision-making behavior modeling and simulation. Sustainability 2022, 14, 8874. [Google Scholar] [CrossRef]
- Vatchova, B.; Boneva, Y. Design of Fuzzy and Conventional Controllers for Modeling and Simulation of Urban Traffic Light System with Feedback Control. Mathematics 2023, 11, 373. [Google Scholar] [CrossRef]
- Vatchova, B.; Boneva, Y.; Gegov, A. Modelling and Simulation of Traffic Light Control. J. Cybern. Inf. Technol. 2023, 2, 179–191. [Google Scholar] [CrossRef]
- Gegov, A. Distributes Fuzzy Control of Multivariable Systems. In International Series in Intelligent Technologies (ISIT); Springer: Berlin/Heidelberg, Germany, 1996; Volume 6, pp. 1–186. ISBN 978-94-015-8640-5. [Google Scholar]
- Gegov, A. Complexity Management in Fuzzy Systems. In Studies in Fuzziness and Soft Computing (STUDFUZZ); Springer: Berlin/Heidelberg, Germany, 2007; Volume 211, pp. 1–349. ISBN 978-3-540-38885-2. [Google Scholar]
- Fuzzy Logic Toolbox-MATLAB. Available online: https://www.mathworks.com/products/fuzzy-logic.html (accessed on 25 September 2024).
- Popchev, I.; Peneva, V. An Algorithm for Comparison of Fuzzy Sets. Fuzzy Sets Syst. 1993, 60, 59–65. [Google Scholar] [CrossRef]
- Peneva, V.; Popchev, I. Multicriteria Decision Making Based on Fuzzy Relations. J. Cybern. Inf. Technol. 2008, 8, 3–12. Available online: https://cit.iict.bas.bg/CIT_08/v8-4/3-12.pdf (accessed on 1 March 2025).
- Peneva, V.; Popchev, I. Fuzzy Criteria Importance with Weighting Functions. Compt. Rendus Acad. Bulg. Sci. 2008, 61, 293–300. Available online: https://citeseerx.ist.psu.edu/document?repid=rep1&type=pdf&doi=b70ac1cba0a2c291a68c4a733bc257923a459357 (accessed on 1 March 2025).
- Zhang, D.; Zhang, Z.; Jiao, X.; Zhang, Y. Hybrid fuzzy grammar dynamic graph diffusing attention network for traffic flow prediction. Future Gener. Comput. Syst. 2025, 167, 107725. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, X.; Hou, W.; Liu, H.; Wang, J. A novel hybrid model combining a fuzzy inference system and a deep learning method for short-term traffic flow prediction. Knowl. Based Syst. 2022, 255, 109760. [Google Scholar] [CrossRef]
- Jamshidnejad, A.; Schutter, B. A combined probabilistic-fuzzy approach for dynamic modeling of traffic in smart cities: Handling imprecise and uncertain traffic data. Comput. Electr. Eng. 2024, 119 Pt A, 109552. [Google Scholar] [CrossRef]
- Liu, X.; Jiang, X.; Luo, X.; Zhang, Z.; Ji, P. Exact and heuristic algorithms for team orienteering problem with fuzzy travel times. Expert Syst. Appl. 2025, 278, 127369. [Google Scholar] [CrossRef]
- Aliskan, I. The optimization-based fuzzy logic controllers for autonomous ground vehicle path tracking. Eng. Appl. Artif. Intell. 2025, 151, 110642. [Google Scholar] [CrossRef]
- Tunc, I.; Yesilyurt, A.Y.; Soylemez, M.T. Different Fuzzy Logic Control Strategies for Traffic Signal Timing Control with State Inputs. IFAC-PapersOnLine 2021, 54, 265–270. [Google Scholar] [CrossRef]
- Wiering, M.A.; Van Veenen, J.; Vreeken, J.; Koopman, A. Intelligent Traffic Light Control; Technical Report UU-CS-2004-029; 2004; pp. 1–30. Available online: https://research-portal.uu.nl/en/publications/intelligent-traffic-light-control (accessed on 1 March 2025).
- Shi, Y.; Wang, Z.; LaClair, T.J.; Wang, C.; Shao, Y.; Yuan, J. A Novel Deep Reinforcement Learning Approach to Traffic Signal Control with Connected Vehicles. Appl. Sci. 2023, 13, 2750. [Google Scholar] [CrossRef]
- Du, Y.; ShangGuan, W.; Rong, D.; Chai, L. RA-TSC: Learning Adaptive Traffic Signal Control Strategy via Deep Reinforcement Learning. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 3275–3280. [Google Scholar]
- Guo, Q.; Li, L.; Ban, X.J. Urban traffic signal control with connected and automated vehicles: A survey. Transp. Res. Part C Emerg. Technol. 2019, 101, 313–334. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| x1 Number of Cars for the Main Road | x2 Number of Cars for the Second Road | x3 Number Cars for the Third Road | u1 Green Light for the Main Road/s | u2 Green Light for the Other Two Roads | |
|---|---|---|---|---|---|
| Range (capacity)/number of cars for the whole intersection | [0 2700] | [0 900] | [0 1800] | ||
| 1 iteration | 960 | 872 | 250 | 49 | 51 |
| 2 iteration | 903 | 888 | 256 | 50 | 50 |
| 3 iteration | 903 | 888 | 256 | 50 | 50 |
| x1 Number of Cars for the Main Road | x2 Number of Cars for the Second Road | x3 Number of Cars for the Third Road | u1 Green Light for the Main Road/s | u2 Green Light for the Other Two Roads | |
|---|---|---|---|---|---|
| Range (capacity)/number of cars for the whole intersection | [0 1800] | [0 900] | [0 1800] | ||
| 1 iteration | 932 | 84 | 150 | 73 | 27 |
| 2 iteration | 944 | 80 | 157 | 73 | 27 |
| 3 iteration | 944 | 80 | 157 | 73 | 27 |
| x1 Number of Cars for the Main Road | x2 Number of Cars for the Second Road | x3 Number of Cars for the Third Road | u1 Green Light for the Main Road/s | u2 Green Light for the Other Two Roads | |
|---|---|---|---|---|---|
| Range (capacity)/number of cars for the whole intersection | [0 1800] | [0 900] | [0 1800] | ||
| 1 iteration | 398 | 100 | 127 | 53 | 47 |
| 2 iteration | 403 | 100 | 127 | 53 | 47 |
| 3 iteration | 403 | 100 | 127 | 53 | 47 |
| x1 Number of Cars for the Main Road | x2 Number of Cars for the Second Road | u1 Green Light for the Main Road/s | u2 Green Light for the Other Two Roads | |
|---|---|---|---|---|
| Range (capacity)/number of cars for the whole intersection | [0 1800] | [0 900] | ||
| 1 iteration | 454 | 307 | 52 | 48 |
| 2 iteration | 452 | 307 | 52 | 48 |
| 3 iteration | 452 | 307 | 52 | 48 |
| x1 Number of Cars for the Main Road | x2 Number of Cars for the Second Road | x3 Number of Cars for the Third Road | u1 Green Light for the Main Road/s | u2 Green Light for the Other Two Roads | |
|---|---|---|---|---|---|
| Range (capacity)/number of cars for the whole intersection | [0 2700] | [0 900] | [0 800] | ||
| 1 iteration | 960 | 872 | 250 | 50 | 50 |
| 2 iteration | 903 | 888 | 256 | 50 | 50 |
| 3 iteration | 903 | 888 | 256 | 50 | 50 |
| x1 Number of Cars for the Main Road | x2 Number of Cars for the Second Road | x3 Number of Cars for the Third Road | u1 Green Light for the Main Road/s | u2 Green Light for the Other Two Roads | |
|---|---|---|---|---|---|
| Range (capacity)/number of cars for the whole intersection | [0 2700] | [0 900] | [0 1800] | ||
| 1 iteration | 944 | 80 | 157 | 50 | 50 |
| 2 iteration | 932 | 80 | 157 | 50 | 50 |
| 3 iteration | 932 | 80 | 157 | 50 | 50 |
| x1 Number of Cars for the Main Road | x2 Number of Cars for the Second Road | x3 Number of Cars for the Third Road | u1 Green Light for the Main Road/s | u2 Green Light for the Other Two Roads | |
|---|---|---|---|---|---|
| Range (capacity)/number of cars for the whole intersection | [0 2700] | [0 900] | [0 1800] | ||
| 1 iteration | 398 | 100 | 127 | 50 | 50 |
| 2 iteration | 398 | 100 | 127 | 50 | 50 |
| 3 iteration | 398 | 100 | 127 | 50 | 50 |
| x1 Number of Cars for the Main Road | x2 Number of Cars for the Second Road | u1 Green Light for the Main Road/s | u2 Green Light for the Other Two Roads | |
|---|---|---|---|---|
| Range (capacity)/number of cars for the whole intersection | [0 1800] | [0 900] | ||
| 1 iteration | 452 | 307 | 50 | 50 |
| 2 iteration | 454 | 307 | 50 | 50 |
| 3 iteration | 454 | 307 | 50 | 50 |
| x1 Number of Cars for the Main Road | x2 Number of Cars for the Second Road | x3 Number of Cars for the Third Road | u1 Green Light for the Main Road/s | u2 Green Light for the Other Two Roads | |
|---|---|---|---|---|---|
| Range (capacity)/number of cars for the whole intersection | [0 2700] | [0 900] | [0 1800] | ||
| 1 iteration | 960 | 872 | 250 | 43 | 57 |
| 2 iteration | 903 | 888 | 256 | 41 | 59 |
| 3 iteration | 902 | 888 | 256 | 41 | 59 |
| x1 Number of Cars for the Main Road | x2 Number of Cars for the Second Road | x3 Number of Cars for the Third Road | u1 Green Light for the Main Road/s | u2 Green Light for the Other Two Roads | |
|---|---|---|---|---|---|
| Range (capacity)/number of cars for the whole intersection | [0 1800] | [0 900] | [0 1800] | ||
| 1 iteration | 931 | 80 | 157 | 69 | 31 |
| 2 iteration | 943 | 80 | 157 | 69 | 31 |
| 3 iteration | 943 | 80 | 157 | 69 | 31 |
| x1 Number of Cars for the Main Road | x2 Number of Cars for the Second Road | x3 Number of Cars for the Third Road | u1 Green Light for the Main Road/s | u2 Green Light for the Other Two Roads | |
|---|---|---|---|---|---|
| Range (capacity)/number of cars for the whole intersection | [0 1800] | [0 900] | [0 900] | ||
| 1 iteration | 397 | 100 | 127 | 54 | 46 |
| 2 iteration | 397 | 100 | 127 | 54 | 46 |
| 3 iteration | 397 | 100 | 127 | 54 | 46 |
| x1 Number of Cars for the Main Road | x2 Number of Cars for the Second Road | u1 Green Light for the Main Road/s | u2 Green Light for the Other Two Roads | |
|---|---|---|---|---|
| Range (capacity)/number of cars for the whole intersection | [0 1800] | [0 900] | ||
| 1 iteration | 455 | 307 | 47 | 53 |
| 2 iteration | 455 | 307 | 47 | 53 |
| 3 iteration | 455 | 307 | 47 | 53 |
| x1 Number of Cars for the Main Road | x2 Number of Cars for the Second Road | x3 Number of Cars for the Third Road | u1 Green Light for the Main Road/s | u2 Green Light for the Other Two Roads | |
|---|---|---|---|---|---|
| Range (capacity)/number of cars for the whole intersection | [0 2700] | [0 900] | [0 1800] | ||
| 1 iteration | 960 | 872 | 250 | 37 | 63 |
| 2 iteration | 898 | 888 | 256 | 36 | 64 |
| 3 iteration | 898 | 888 | 256 | 36 | 64 |
| x1 Number of Cars for the Main Road | x2 Number of Cars for the Second Road | x3 Number of Cars for the Third Road | u1 Green Light for the Main Road/s | u2 Green Light for the Other Two Roads | |
|---|---|---|---|---|---|
| Range (capacity)/number of cars for the whole intersection | [0 1800] | [0 900] | [0 1800] | ||
| 1 iteration | 942 | 80 | 157 | 68 | 32 |
| 2 iteration | 942 | 80 | 157 | 68 | 32 |
| 3 iteration | 942 | 80 | 157 | 68 | 32 |
| x1 Number of Cars for the Main Road | x2 Number of Cars for the Second Road | x3 Number of Cars for the Third Road | u1 Green Light for the Main Road/s | u2 Green Light for the Other Two Roads | |
|---|---|---|---|---|---|
| Range (capacity)/number of cars for the whole intersection | [0 1800] | [0 900] | [0 900] | ||
| 1 iteration | 397 | 100 | 127 | 53 | 47 |
| 2 iteration | 397 | 100 | 127 | 53 | 47 |
| 3 iteration | 397 | 100 | 127 | 53 | 47 |
| x1 Number of Cars for the Main Road | x2 Number of Cars for the Second Road | u1 Green Light for the Main Road/s | u2 Green Light for the Other Two Roads | |
|---|---|---|---|---|
| Range (capacity)/number of cars for the whole intersection | [0 1800] | [0 900] | ||
| 1 iteration | 454 | 307 | 31 | 69 |
| 2 iteration | 451 | 307 | 31 | 69 |
| 3 iteration | 451 | 307 | 31 | 69 |
| x1 Number of Cars for the Main Road | x2 Number of Cars for the Second Road | x3 Number of Cars for the Third Road | u1 Green Light for the Main Road/s | u2 Green light for the Other Two Roads | |
|---|---|---|---|---|---|
| Range (capacity)/number of cars for the whole intersection | [0 2700] | [0 900] | [0 1800] | ||
| 1 iteration | 960 | 872 | 250 | 47 | 53 |
| 2 iteration | 903 | 888 | 256 | 44 | 56 |
| 3 iteration | 903 | 888 | 256 | 44 | 56 |
| x1 Number of Cars for the Main Road | x2 Number of Cars for the Second Road | x3 Number of Cars for the Third Road | u1 Green Light for the Main Road/s | u2 Green Light for the Other Two Roads | |
|---|---|---|---|---|---|
| Range (capacity)/number of cars for the whole intersection | [0 1800] | [0 900] | [0 1800] | ||
| 1 iteration | 931 | 80 | 157 | 80 | 20 |
| 2 iteration | 948 | 80 | 157 | 80 | 20 |
| 3 iteration | 948 | 80 | 157 | 80 | 20 |
| x1 Number of Cars for the Main Road | x2 Number of Cars for the Second Road | x3 Number of Cars for the Third Road | u1 Green Light for the Main Road/s | u2 Green Light for the Other Two Roads | |
|---|---|---|---|---|---|
| Range (capacity)/number of cars for the whole intersection | [0 1800] | [0 900] | [0 1800] | ||
| 1 iteration | 397 | 100 | 127 | 64 | 36 |
| 2 iteration | 399 | 100 | 127 | 64 | 36 |
| 3 iteration | 397 | 100 | 127 | 64 | 36 |
| x1 Number of Cars for the Main Road | x2 Number of Cars for the Second Road | u1 Green Light for the Main Road/s | u2 Green Light for the Other Two Roads | |
|---|---|---|---|---|
| Range (capacity)/number of cars for the whole intersection | [0 1800] | [0 900] | ||
| 1 iteration | 455 | 307 | 60 | 40 |
| 2 iteration | 455 | 307 | 60 | 40 |
| 3 iteration | 455 | 307 | 60 | 40 |
| Fuzzy Controller 1 | Fuzzy Controller 2 | Fuzzy Controller 3 | Fuzzy Controller 4 | Classical Controller | |
|---|---|---|---|---|---|
| Flow (veh/h) | 3121 | 3111 | 3121 | 3115 | 3125 |
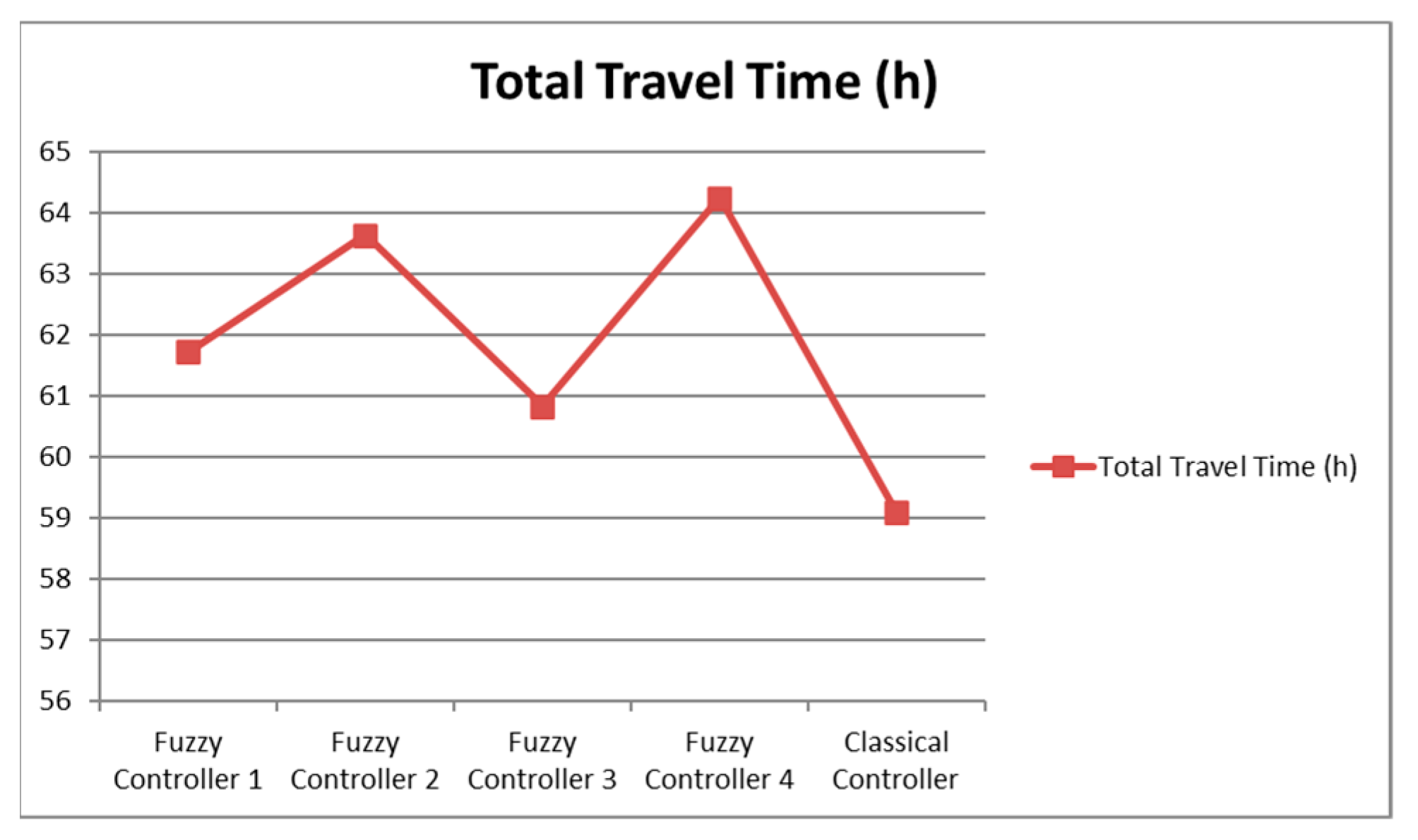
| Total travel time (h) | 61.73 | 63.64 | 60.84 | 64.25 | 59.1 |
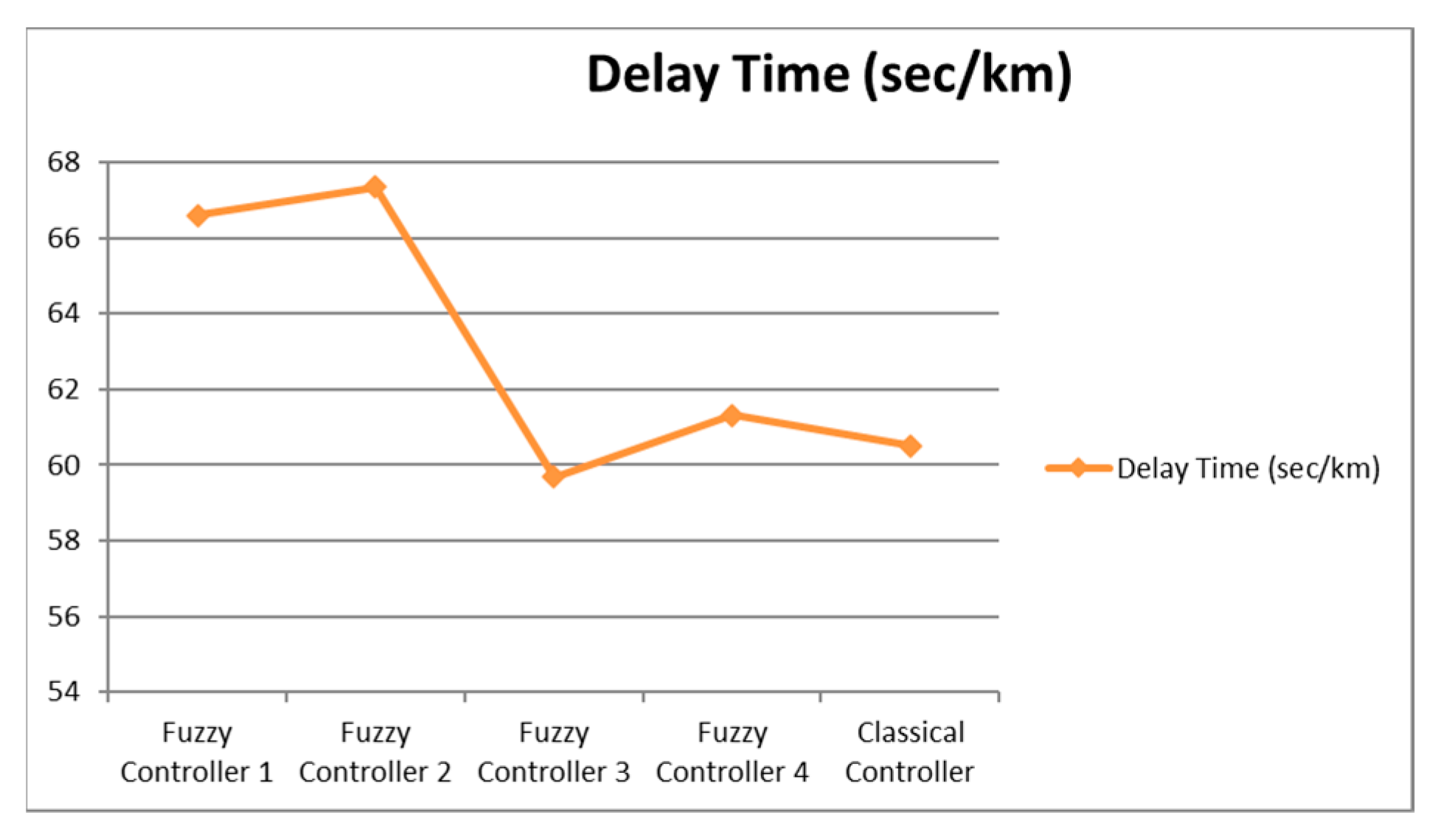
| Delay (s/km) | 66.6 | 67.35 | 59.68 | 61.32 | 60.51 |
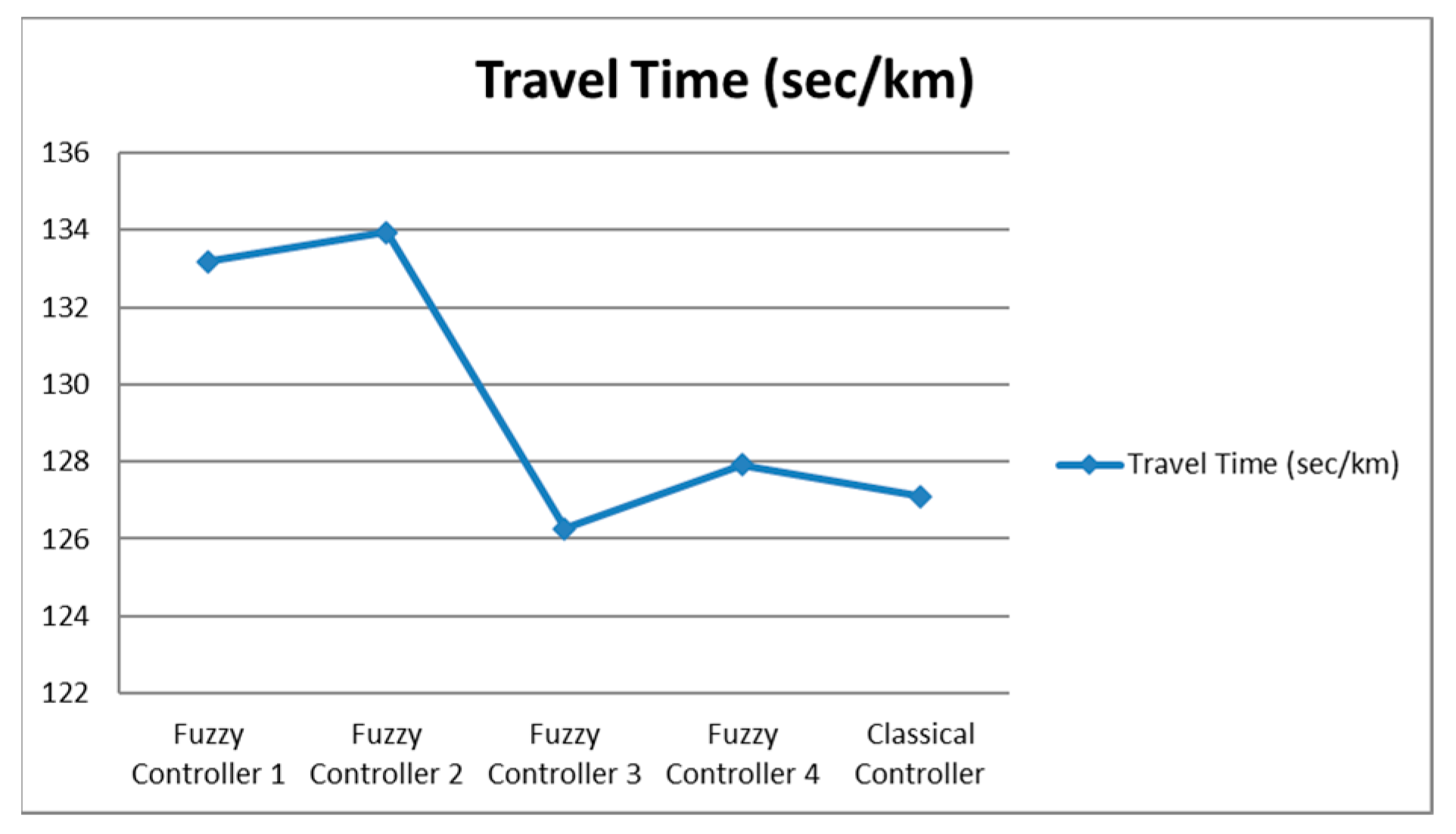
| Travel time (s/km) | 133.19 | 133.95 | 126.27 | 127.91 | 127.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gegov, A.; Vatchova, B.; Boneva, Y.; Ichtev, A. Heuristic Fuzzy Approach to Traffic Flow Modelling and Control on Urban Networks. Future Internet 2025, 17, 227. https://doi.org/10.3390/fi17050227
Gegov A, Vatchova B, Boneva Y, Ichtev A. Heuristic Fuzzy Approach to Traffic Flow Modelling and Control on Urban Networks. Future Internet. 2025; 17(5):227. https://doi.org/10.3390/fi17050227
Chicago/Turabian StyleGegov, Alexander, Boriana Vatchova, Yordanka Boneva, and Alexandar Ichtev. 2025. "Heuristic Fuzzy Approach to Traffic Flow Modelling and Control on Urban Networks" Future Internet 17, no. 5: 227. https://doi.org/10.3390/fi17050227
APA StyleGegov, A., Vatchova, B., Boneva, Y., & Ichtev, A. (2025). Heuristic Fuzzy Approach to Traffic Flow Modelling and Control on Urban Networks. Future Internet, 17(5), 227. https://doi.org/10.3390/fi17050227