1. Introduction
Wireless sensor network (WSN) technology is one of the critical technologies in the sensing layer of the IoT. A large number of sensors deployed in the target area achieve interconnectivity between objects through collaborative sensing and collection of environmental data [
1,
2]. Directional sensors have limited sensing angles and can adjust sensing direction through rotation. Compared to omnidirectional sensors that cannot be adjusted, directional sensors are more flexible in collecting environmental data. Therefore, deploying directional sensor networks (DSNs) in the sensing layer of the IoT can better collect data within the monitoring area. Directional sensors with adjustable sensing directions are widely used in different IoT sensing layers, in applications such as ecological monitoring, intelligent transportation, smart agriculture, battlefield monitoring, and forest protection [
3,
4].
Full coverage of the target area is the foundation for ensuring the efficiency of the IoT sensing layer. In randomly deployed DSNs, the distribution of nodes is uneven [
5]. This uneven distribution will inevitably result in some monitoring areas not being covered by any sensors, and there will be significant overlap in the coverage range of some sensors. In addition, being affected by harsh environments or electronic component failures can cause some sensors to malfunction [
6]. The regions not covered by sensors in the monitoring area are coverage holes [
7]. A coverage hole seriously affects the coverage performance and the efficiency of data collection of the IoT sensing layer. Therefore, it is reasonable and necessary to repair coverage holes and achieve coverage enhancement by adjusting the work angle and position of sensors.
There are two optimization methods for node deployment to achieve coverage enhancement in DSNs: adjusting the work angle and redeploying mobile nodes. The deployment optimization algorithm based on adjusting the work angle assumes that nodes do not move, and expands the coverage range by rotating sensors to achieve coverage enhancement. Intelligent optimization algorithms are the most effective method for adjusting sensing direction. Particle swarm optimization, ant colony optimization, and bat algorithms all have the characteristics of fewer parameters and faster convergence speed [
8]. In addition, methods based on geometric (Voronoi diagram [
9], Delaunay triangulation [
10]) and virtual force [
11] are also classic sensing direction adjustment methods. The deployment optimization method based on adjusting the sensing direction can effectively improve network coverage, but this method relies on higher sensor density. In a random deployment area, only adjusting the sensing direction cannot achieve full coverage, and there are still coverage holes that cannot be repaired.
Mobile node redeployment is currently a hot topic in coverage enhancement research. Mobile node redeployment focuses more on the mobility of nodes, and achieves coverage enhancement by scheduling nodes to repair coverage holes. The virtual force algorithm and swarm intelligence are practical algorithms for solving deployment optimization problems. These algorithms have received widespread attention in the redeployment of mobile nodes [
12,
13]. Recently, the method based on the minimum exposure path (MEP) has been favored by researchers [
14]. The principle of this type of method is to repair coverage holes by scheduling sensors to the searched MEP. The characteristic of MEP-based methods is to prioritize repairing the areas with the worst coverage, which can achieve the maximum coverage enhancement effect under the same conditions. Because the MEP is the path with the worst coverage in the monitoring area, scheduling sensors to the MEP or adjusting the sensing direction of sensors on the MEP can achieve maximum coverage performance improvement. The coverage enhancement method based on mobile node redeployment performs well in repairing coverage holes. However, this method requires a lot of energy, and deploying a large number of mobile sensors will also increase the construction cost of the IoT sensing layer.
Based on the above analysis, it can be concluded that the current two methods for coverage enhancement have problems such as high sensor density requirements, high deployment costs, and low coverage efficiency. To address these problems, we studied the coverage enhancement problem of the IoT sensing layer composed of a mixture of stationary and mobile directional sensors. Then, we proposed a node deployment optimization method to achieve coverage enhancement.
The method proposed in this article fully utilizes directional sensors’ rotation and movement performance. The proposed method mainly includes two stages. First, the sensing direction is adjusted by rotating the stationary sensor to expand the effective coverage area and improve the coverage rate. In the second stage, the first step is to search for the MEP as the target path to repair the coverage hole. Then, a redeployment strategy is designed for mobile sensors, repairing coverage holes and reducing redundant coverage by scheduling mobile nodes. The proposed method significantly improves the network coverage through two-stage coverage enhancement. In addition, our approach takes full advantage of the coverage area of stationary sensors, reducing the use of mobile sensors and deployment costs. Compared with other algorithms, our method has significant advantages regarding coverage rate, redundancy rate, and energy consumption. The main contributions of this paper are summarized as follows.
We propose a two-stage node deployment optimization method to achieve coverage enhancement. This method fully utilizes the rotation and movement capabilities of directional sensors, improving the coverage rate and reducing deployment costs by adjusting the sensing direction and redeploying mobile nodes.
In the stage of adjusting the sensing direction, an improved particle swarm optimization algorithm is proposed with the goal of maximizing the effective coverage area and minimizing the redundancy rate to solve the optimization model and obtain the optimal working direction of the stationary sensor.
In the redeployment phase of mobile nodes, we first use an improved sparrow search algorithm to obtain the MEP. Using the obtained MEP as the target path to repair the coverage hole, a mobile node redeployment strategy is designed to repair the hole. Our method can improve coverage performance with lower mobile energy consumption while meeting the conditions of energy balance.
The performance of the proposed method was simulated and compared with other advanced methods in terms of coverage rate and energy consumption. We also analyzed the reasons for the performance differences.
This article consists of six parts, and the rest are arranged as follows. We provide an introduction to the relevant research on coverage enhancement in
Section 2.
Section 3 describes the mathematical expression of the system model and problem. In
Section 4, we provide a detailed description of our algorithm.
Section 5 presents the experiments and performance evaluation. In
Section 6, the contribution of this article is summarized and future work is planned.
2. Related Work
Coverage enhancement plays an important role in improving the coverage performance and sensing efficiency of the IoT sensing layer. The optimization method for node deployment with enhanced coverage is currently a research hotspot. Next, we provide a detailed introduction and summary of coverage enhancement methods based on adjusting sensing direction and redeploying mobile nodes.
2.1. Coverage Enhancement Method Based on Adjusting Sensing Direction
Nodes’ sensing direction scheduling problem is an NP-hard problem, and it is difficult to obtain accurate mathematical solutions [
15]. Intelligent optimization algorithms can obtain approximate optimal solutions through iterative optimization [
16]. Chen et al. [
17] improved the particle swarm optimization algorithm for coverage enhancement in DSNs and proposed a node redeployment method. This algorithm uses an overlap rate as the fitness function. By iteratively adjusting the sensing direction of directional sensor nodes, the overlap rate of network nodes is reduced, and the coverage performance of the network is improved. Yao et al. [
18] proposed a new coverage enhancement method based on the Discrete Army Ant Search Optimizer (DAASO) to address boundary constraints and coverage maximization problems. Yao and Liao et al. [
19] improved the Gravity Search Algorithm (IGSA) and proposed a coverage control strategy to improve the monitoring quality of DSNs. Their method consists of coverage enhancement and node sleep. The coverage enhancement method improves network coverage. Node sleep reduces redundancy and improves energy utilization.
Algorithms based on geometry and virtual forces are also commonly used methods for sensing direction adjustment problems [
20]. Zhou et al. [
21] designed a coverage optimization scheme based on the Voronoi diagram. The geometric relationship between Voronoi units and node sensing range is analyzed, and the directional sensor is rotated to maximize the coverage area of each Voronoi unit. Mahboubi et al. [
22] designed a DSN coverage enhancement strategy based on virtual force and PSO algorithm. This method establishes a sensing direction adjustment model by analyzing and calculating the forces acting on nodes. Based on this, the PSO algorithm is used to solve the optimal sensing direction set.
2.2. Coverage Enhancement Method Based on Mobile Node Redeployment
There are three main methods for redeploying mobile nodes: the virtual force method, the swarm intelligence method, and the MEP method. The virtual force algorithm (VFA) schedules sensors by simulating the interaction forces (including attraction and repulsion) between sensors, sensors and obstacles, and sensors and boundaries to achieve coverage enhancement. The method based on VFA is the most effective coverage enhancement strategy [
23]. Sha et al. [
24] improved the virtual force algorithm by introducing geometric relationships to analyze the forces between nodes, greatly enhancing the coverage performance of the network. Liu et al. [
25] proposed a virtual force algorithm applied to 3D scenes. This method enhances coverage by scheduling node movements and avoids ineffective node movements through rigorous force analysis. The advantage of the virtual force algorithm and its improvement methods lies in their fast convergence speed. However, it is usually impossible to obtain the optimal distance threshold, resulting in redundant coverage of nodes and difficulty in achieving the best coverage enhancement effect.
Swarm intelligence (SI) is another widely used optimization method in WSN coverage enhancement [
26]. The method proposed by Yao et al. [
27] combines virtual forces with an ant–lion optimization algorithm, which accelerates convergence speed and improves optimization performance. The method they proposed can effectively enhance the coverage of the network. Zhao et al. [
28] proposed a coverage enhancement method that combines game theory and the biological characteristics of vampire bats. This method transforms the coverage problem into a task allocation problem, which can optimize the coverage range and reduce deployment costs. Wen et al. [
29] improved the vampire bat algorithm and combined it with the virtual force algorithm. Their method can achieve coverage enhancement with less moving distance. The SI-based methods perform better in coverage enhancement than the algorithm based on virtual force. However, the SI method ignores moving energy consumption and energy balance.
In recent years, MEP methods have been applied to address coverage enhancement problems. Early research on the MEP focused on how to determine the path with the worst network coverage without applying the MEP to coverage optimization [
30,
31]. Bonnah et al. [
32] first applied the MEP method for coverage optimization. Their method achieves coverage enhancement by adding sensors on the MEP. Cai et al. [
33] used the PSO algorithm to search for the MEP and solve the coverage enhancement problem in DSNs. Both methods above can only schedule one sensor at a time, which is inefficient and prone to new coverage holes, resulting in limited coverage. The existing MEP-based methods have shown good results in improving coverage, but there are still problems with energy consumption, efficiency, and other aspects.
As mentioned above, the current coverage enhancement algorithms mainly focus on two aspects: adjusting the sensing direction and redeploying mobile nodes. The method based on adjusting the sensing direction requires high-density sensors to achieve better results. The method based on mobile node redeployment requires a large number of mobile sensors, which will increase deployment costs. Moreover, the current research primarily focuses on optimizing coverage effectiveness, with little consideration given to the impact of mobile energy consumption on the network. Therefore, to solve the above problems, we comprehensively consider coverage optimization and energy balance, deploy stationary and mobile sensors in the network, and enhance coverage by rotating and moving nodes.
On this basis, we studied the coverage enhancement problem of the sensing layer of the IoT, which consists of stationary and mobile directional sensors, and proposed a two-stage optimization method. The coverage area is expanded by rotating sensors, coverage holes are repaired by moving sensors, and the network coverage is optimized. The proposed method can achieve coverage enhancement with less energy consumption and mobile sensors.
3. System Model and Problem Formulation
In this section, we first introduce the system model and the energy consumption model, and then analyze the evaluation indicators used in this paper. Finally, we analyze and describe the problems studied.
3.1. System Model
In our work, the following assumptions were made regarding the configuration and network of sensors: (1) the network consists of rotatable stationary sensors, mobile sensors, and a control center (such as a sink or base station); (2) the control center is responsible for collecting location information of sensors and broadcasting scheduling instructions to the sensors; (3) all sensors have the same parameters; (4) the position of each sensor can be obtained (GPS or positioning algorithm); and (5) the sensor is equipped with a built-in clock synchronization algorithm and pre-set routing protocol to ensure normal communication.
We set the region of interest (ROI) of the IoT sensing layer as a regular two-dimensional rectangle. The size of the ROI is . Two types of sensor are deployed in the ROI: stationary sensors and mobile sensors. Other parameters of the sensor are consistent, except for mobility. All sensors can be represented by the set . Stationary sensors can be represented by the set , where represents the stationary sensor. The mobile sensors are represented by the set , where represents the mobile sensor.
The directional sensors in a DSN have adjustable sensing directions and limited sensing angles, with the sensing range of a sector. The sensing radius and angle are important factors that constrain the sensing ability of directional sensors. The position and working direction can also affect the sensing area of the sensor. Its sensing model can be described using a 4-tuple:
where the position coordinates, sensing radius, and sensing offset angle (half of the vertex angle) of node
are
,
, and
respectively.
represents the working direction at time
.
The detection model of directional sensors uses a 0/1 model. When any point within the monitoring area meets the following two conditions, that point can be detected by the sensor:
3.2. Energy Consumption Model
The energy consumed during node deployment optimization mainly comes from node rotation, information transmission, and node moving. The energy consumption generated by moving is much greater than that by the first two. Therefore, we can approximate the energy consumption of the deployment optimization process by measuring the moving distance. The initial energy of both stationary and mobile sensors in the network is
. The energy consumption generated by moving a unit distance is
. The mobile energy consumption of nodes can be expressed as:
where
indicates the initial location of the mobile node, and
indicates the redeployment location.
3.3. Evaluation Indicators
The coverage rate and redundancy rate are the indexes used to evaluate the effect of coverage optimization, and the moving distance is an important index to measure energy consumption. Therefore, we use these three metrics to evaluate the effectiveness of the proposed method, as shown below.
Coverage rate (COVR): Network coverage depends on the effective coverage area of the sensor. In a region of interest of size
, the coverage rate can be expressed as:
where
represents the area of the ROI, and
represents the sum of the effective coverage area of all sensors.
To comprehensively evaluate the performance of the algorithm proposed in this paper, we used a covering upper bound (CUB) calculation scheme from the method in reference [
33], as follows:
where
represents the theoretical maximum effective coverage area of the stationary and mobile sensors.
Redundancy ratio (REDR): The ratio of the overlapping coverage area of the sensors in the network to the coverage area of the sensors can be expressed as:
where
represents the number of sensors,
represents the coverage area of a single sensor, and
represents the sum of overlapping coverage areas.
Coverage efficiency: This reflects the resource utilization and monitoring quality of the network. Its definition is the ratio of the effective coverage area to the sensing area of all nodes. The larger the value of coverage efficiency, the higher the resource utilization of the network and the smaller the redundant coverage of nodes. The following formula can express the coverage efficiency:
Moving distance: We use moving distance to evaluate the energy consumption during node deployment optimization. We use three indicators to comprehensively measure the performance of our method in terms of moving distance. The three indicators are defined below, namely: total moving distance (TMD), maximum moving distance (MMD), and uniformity of moving distance (UMD):
where
represents the number of sensors and
represents the sensor moving distance.
3.4. Problem Formulation
As mentioned earlier, the objective of this paper is to achieve coverage optimization and enhancement by scheduling the working direction and position of nodes. Therefore, in the process of node deployment optimization, we should consider how to reduce redundant coverage and maximize coverage. At the same time, we should also pay attention to minimizing the moving distance to ensure the survival time of the network. Next, we analyze the objective functions and constraints of these two problems in detail.
3.4.1. Coverage Optimization Problem
During the deployment optimization process, the proposed method expands the coverage range by adjusting the sensing direction of stationary sensors and repairs coverage holes by redeploying mobile sensors. We aim to reduce redundancy and maximize coverage. The objective function can be expressed as:
In order to minimize redundancy and maximize coverage, the effective coverage area of all sensors should be increased as much as possible. So, the objective function can also be expressed as:
Therefore, when adjusting the sensing direction, we take the coverage rate as the optimization objective to solve for the optimal working direction of the sensor. When redeploying mobile nodes, we also consider coverage as one of the objective functions to further improve network coverage.
3.4.2. Minimum Moving Distance
In the process of redeploying nodes, we choose to schedule the nearest mobile node to repair the coverage holes, thereby minimizing the total moving distance. Its objective function is as follows:
The constraints of the objective function are shown in Formulas (16) to (20). The mobile nodes are restricted and labeled using Formula (17). In addition, an energy threshold is set to ensure energy balance in the network.
In the above equations, represents the mobile node, represents the moving distance of node , and represents the total moving distance by all nodes. is the marking function. When moves, = 1; otherwise, = 0. represents the total number of mobile nodes, while represents the remaining energy after moving.
4. Proposed Method
In this section, we design a two-stage node deployment optimization method to address the coverage enhancement problem. The first stage expands the coverage range by adjusting the sensing direction of the stationary sensor. The second stage repairs coverage holes with less moving distance and achieves coverage enhancement. The principle and framework of the node deployment optimization method proposed in this article are shown in
Figure 1. This method mainly includes the following steps: adjusting sensing direction, searching for the MEP, calculating the required number of mobile sensors, and scheduling mobile sensors.
4.1. Sensing Direction Adjustment Method Based on IPSO
Particle swarm optimization (PSO) is a global optimization algorithm with few parameters, single rules, and sensitive and fast convergence ability. In most cases, PSO has a faster convergence speed than evolutionary algorithms. Due to the excellent ability of PSO to search for approximate optimal solutions, this paper adopts PSO to solve the optimal sensing direction of sensors. The speed and position update rules are the core of PSO, and each particle is a potential solution. Individual and global optimal values are searched for in the search space by iteratively updating speed and location.
Inertia weight is an essential parameter in the formula of velocity and position. In traditional PSO, the inertia weight is a fixed constant, which means the local search ability of the algorithm is weak and it is easy to fall into a local optimum. To solve this problem, we use a nonlinear dynamic adjustment method with random factors to improve the inertia weight. The improved inertia weight is a dynamically adjusted value that can avoid getting stuck in local optima.
In addition, to improve the global search capability of PSO, we introduce the Cauchy mutation operator. Cauchy mutation is an adaptive mutation optimization method that can increase the population diversity of PSO through mutation operations, thereby improving the global search ability.
In a randomly deployed network, the control center (base station) collects the location information of all nodes. We can adjust the sensing direction of nodes by running the IPSO algorithm in the base station before starting the sensing task. We take the effective coverage area and redundant area of the sensor as the optimization objectives, then use an improved multi-objective particle swarm algorithm to solve the objective function.
We will obtain a solution with the maximum effective coverage area from the search space as the set of sensing directions for sensors in the network. Stationary sensors rotate and adjust their sensing direction based on information from the control center. After a rotation operation, the stationary sensor sends the current position information to the base station. If the expected goal is still not achieved after completing the subsequent steps, the IPSO algorithm will be rerun based on the current position to find a new optimal set of sensing directions. The pseudocode of the sensing direction adjustment method is shown in Algorithm 1.
| Algorithm 1 Sensing direction adjustment method |
| Input: |
| Output: optimal subset |
1: for do
2: Initial direction as the initial population position
3: Initialize the population P
4: Calculate fitness value
5:
6: Generate
7: While failure to meet termination conditions do
8: for each individual do
9: Calculate fitness value
10: if then
11:
12: if then
13:
14: Update individual(velocity and position)
15: Get the best work direction
16: Output the set of optimal working directions |
4.2. Coverage Hole Repair Based on Mobile Node Redeployment
After rotating the stationary sensor, we expanded the total coverage area of the sensors, but there are still coverage holes in the network. Therefore, the task of this stage is to repair coverage holes and achieve coverage enhancement by redeploying mobile nodes. Our mobile node redeployment plan consists of the following steps: using MEP-ISSA to search for repair paths, calculating the number of required mobile sensors, and redeploying mobile sensors.
Similar to the previous section, we run the proposed algorithm in the control center (base station) and then broadcast the results to the sensors. Mobile sensors are scheduled for new locations based on the information obtained.
4.2.1. Repair Path Search Method Based on MEP-ISSA
According to the previous analysis, the MEP is the area with the worst coverage performance in the ROI. When repairing coverage holes, we prioritize selecting holes on the repair path to achieve maximum coverage performance improvement. Therefore, the MEP can be used as a repair path and the improved sparrow search algorithm (ISSA) can be used to search for this path.
The sparrow search algorithm (SSA) [
34] is a swarm intelligence method for learning sparrow foraging and anti-predation biological behaviors. The SSA has the characteristics of low algorithm complexity and strong robustness, making it highly suitable for solving optimization problems. There are three types of sparrows in the population: explorers, followers, and observers [
35]. Explorers are leaders in foraging, possessing high energy reserves and providing followers with areas and directions for foraging. Followers always follow explorers with higher energy. Observers are randomly selected from explorers and followers, and evacuate to a safe area upon discovering danger.
The steps of the SSA algorithm are as follows:
- (1)
Initialize the population and related parameters, and calculate the fitness value of the initial population.
- (2)
Update the explorer position as shown in Formula (23):
where
and
represent the current iteration and the maximum number of iterations, respectively.
represents the position of the sparrow at the
iteration.
and
are two random numbers.
is the warning value and
is the safety threshold.
- (3)
Update the follower position as shown in Formula (24):
where
represents the location of the optimal explorer.
represents the worst individual in the
iteration.
and
are two
matrices.
- (4)
Update the position of the sparrow that is aware of the danger, as shown in Formula (25):
where
,
, and
are random numbers.
represents the worst individual in the
iteration.
is the fitness value of the current individual.
and
are the current maximum and minimum fitness values, respectively.
- (5)
Check whether the stop condition is met. If yes, output the optimal sparrow position. Otherwise, return to Step 2.
The SSA has certain advantages in solving optimization problems, but there are still limitations that most swarm intelligence algorithms have, for example, local optima and algorithm search speed problems. We made the following improvements to address these issues.
- (1)
Population update mechanism
Being trapped in local optima seriously affects the speed and accuracy of the SSA in solving optimization problems. The imbalance of population proportion is an important reason for local optima. Most followers follow the explorer with the highest energy to update their positions. Therefore, if an explorer is always in the local optimum position, it will cause the entire population to be unable to find the global optimum position. To solve this problem, we design update strategies for explorers and followers to enhance the algorithm’s ability to escape local optima, thereby improving the speed and accuracy of the algorithm.
- (2)
Cauchy mutation and reverse learning
We combine Cauchy mutation with reverse learning methods to improve the problems of local optima. The algorithm can avoid getting stuck in local optima by using Cauchy mutation to perturb individual positions with a certain probability. The Cauchy mutation operator can improve the optimization ability of the algorithm. Applying the reverse learning strategy to the sparrow search algorithm can broaden the search area and improve optimization speed. The premise for the algorithm to execute Cauchy mutation and reverse learning strategy is that the fitness value after perturbation is better than the original position.
- (3)
Dynamic adjustment of security threshold
The search capability of the SSA is closely related to the size of the security threshold. When the value of ST is large, all sparrows are in a safe state, and the algorithm performs a global search. When the value of ST is small, sparrows can only forage in a smaller area, and the algorithm performs a local search. In the optimization problem of this paper, it is required that the algorithm combines the characteristics of both. Therefore, we designed a dynamic adjustment strategy to ensure that the algorithm performs well in both global and local searches. After introducing this strategy, the speed and accuracy of the algorithm are improved.
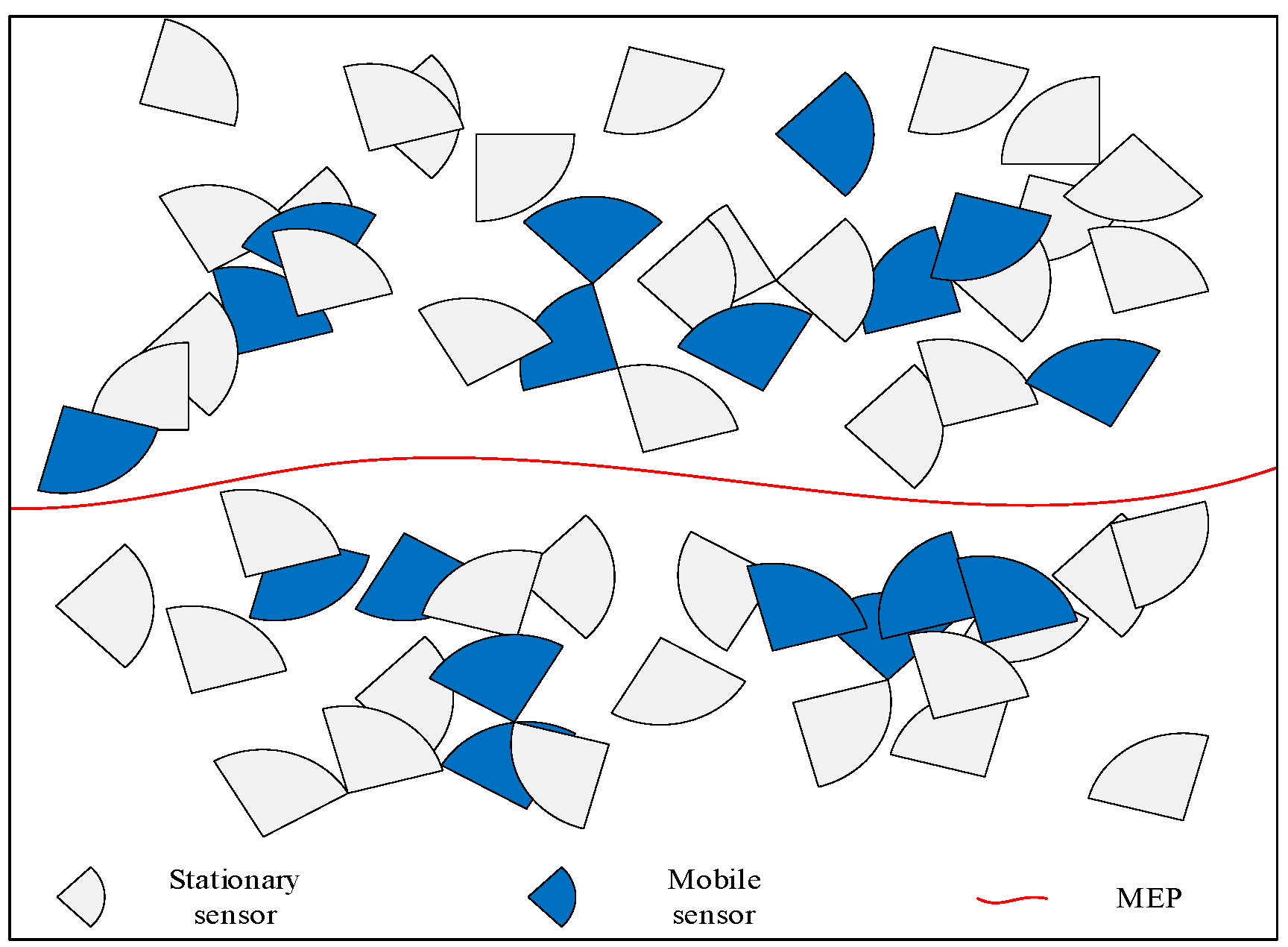
Figure 2 is a schematic diagram of using ISSA to search for the MEP. The white sector in the figure represents the stationary sensor, the blue sector represents the mobile sensor, and the red curve represents the searched MEP. From the figure, it can be seen that the path searched by ISSA has the worst coverage.
The pseudocode of the proposed MEP-ISSA method is shown in Algorithm 2. This method can be used to determine the MEP with the minimum exposure value. The obtained MEP is the path for executing repair tasks.
| Algorithm 2 Repair path search method based on MEP-ISSA |
| Input: L, H, S, , , P |
| Output: MEP |
1: Initialize monitoring area and sensing model
2: Initialize population parameters
3: Calculate fitness values and sort them by size.
4: while failure to meet termination conditions do
5: if then
6: Calculate the attenuation function of the security threshold
7: else
8: Update population
9: end
10: Update the position of sparrows
11: if then
12: Implement reverse learning strategy
13: else
14: Using Cauchy mutation operator
15: end
16: Determine whether to update the location
17: end while
18: Output: MEP |
4.2.2. Calculate the Number of Mobile Sensors Required
After rotation, the position of the stationary sensor no longer changes. Before scheduling mobile nodes to repair coverage holes, we first calculate the total length of coverage holes along the repair path. Then, its sensing area is determined based on the given sensor sensing radius and other parameters. Finally, the required mobile sensors for repairing coverage holes can be obtained through simple mathematical calculations.
From
Figure 3, it can be seen that there is a coverage hole between sensor nodes
and
.
,
, and
represent the length of holes calculated by different methods. If
is chosen as the result, it will cause the calculated length to be greater than the actual length, resulting in redundant coverage.
is the shortest distance between two nodes, so
is chosen as the final result. We take the point with the largest horizontal axis on node
’s sensing sector as the starting point for calculating the length, and the point with the smallest horizontal axis on node
as the endpoint for calculating the length. The distance between two points is the length of the coverage hole being calculated.
The pseudocode of the proposed method for calculating the number of mobile sensors required is shown in Algorithm 3. By using the obtained length, combined with the sensing radius and sensing area of the sensor, the required number of mobile sensors can be calculated.
| Algorithm 3 Calculating the number of mobile sensors |
| Input: |
| Output: , |
1: for do
2: Check the coverage of nodes on MEP
3: if the overlapping coverage equals 0 then
4: Calculate the length between and
5: Sum up the total length
6: end
7: Calculate the maximum coverage range of nodes
8: Output the number of mobile sensors |
4.2.3. Redeploying Mobile Sensors
After determining the location of the coverage hole, we need to schedule the mobile sensor to the location of the hole. In the process of scheduling nodes, each hole has multiple eligible mobile nodes as candidates. Therefore, we need to develop a reasonable mobile node selection and redeployment strategy. This strategy aims to achieve coverage hole repair with the minimum number of sensors and minimal moving distance.
The process of redeploying mobile nodes is shown in
Figure 4 and described as follows. The white sectors in the figure represent stationary sensors, and the blue sectors represent mobile sensors. In the ROI, for repair position
, select the mobile node with the highest overlap coverage as the candidate node. This approach can avoid new coverage holes and also help reduce redundancy rates. As shown in the figure,
,
,
, and
are candidate nodes for repairing position
. Node
is closer to
, so
is the first candidate node. In addition, we should also consider the energy of node
. If the energy consumption generated by node
’s moving exceeds the threshold, the candidate qualification of node
will be canceled. Then, consider the second candidate node
. If node
meets the requirements, move node
to the repair position
. The pseudocode for redeploying mobile sensors is shown in Algorithm 4.
| Algorithm 4 Redeploying mobile sensors |
| Input: |
| Output: |
1: Check the coordinates of the repair location
2: for each do
3: Calculate overlap coverage
4: if then
5: Calculate the distance between nodes,
6: if then
7: Calculate the remaining energy of the sensor
8: if then
9: Move sensor
10: Sum up the total distance
11: Output |
After scheduling the mobile sensors to a new location, mark all redeployed mobile sensors as immovable stationary sensors. If there are still coverage holes in the network, execute the proposed algorithm again for a new iteration until there are no available mobile sensors.
It is worth noting that if there are dead nodes in the network, these nodes will no longer send data to the base station. The locations of these nodes will be considered as coverage holes, and the base station will once again execute coverage hole repair algorithms based on mobile node redeployment. First the MEP is searched for; then, it is judged whether there are available mobile nodes; and, finally, nodes are scheduled to repair holes.
4.3. Time Complexity Analysis
Time complexity is an important performance index of algorithms. The time complexity of our proposed method consists of four components. In the rotation stationary sensor phase, the complexity of IPSO is , where is the maximum number of iterations and is the number of populations. The number of iterations required for the IPSO algorithm to converge is related to the population size. In our study, the number of population particles was set to 30 and the algorithm converged after 50 iterations. ISSA is similar to IPSO, with computational complexity mainly concentrated in the search phase. The complexity of updating positions for all individuals in the population is . Assuming that all individuals reach the maximum number of iterations, the overall complexity of ISSA is . When the number of sparrows in the ISSA algorithm is set to 30, the algorithm reaches convergence after 50 iterations. When calculating the number of moving sensors, we determine it according to the length of the gap between sensors, so its time complexity is . In the redeployment phase, it approximates a bipartite graph matching problem with a time complexity of . Therefore, the total time complexity of the proposed method is , which is approximately equal to . In the phases of calculating the number of mobile sensors and redeployment, due to the small scale of the problem, fewer iterations are required. Based on the convergence of IPSO and ISSA, it can be concluded that the algorithm proposed in this paper achieves convergence with 50 iterations.
5. Simulation Result
In this section, we conduct various types of simulation experiments to verify the effectiveness and superiority of the proposed method. Simulation experiments were performed with different numbers of sensors in different ROI sizes. All experiments were conducted on the MATLAB platform under the Windows 10 system. The position information of the sensors required for the experiment is determined by advanced positioning algorithms. The message transmission between sensors and base stations refers to the WALL routing algorithm in reference [
36]. This routing algorithm has the characteristics of a balanced load and low energy consumption. Because positioning and routing are not the focus of this article, we choose to only provide a brief introduction, without discussing them in detail. In order to avoid errors and improve the persuasiveness of experimental data, we conducted repeated experiments. Each experiment was run 100 times, and the average value was taken as the final experimental result.
Coverage rate, redundancy rate, coverage efficiency, and moving distance are important evaluation indicators for the coverage enhancement process. The performance of the proposed algorithm in these four indicators is compared with VB-IVFA [
29], VF-IALO [
27], and MEP-PSO [
33] algorithms. This study used a directed sensing model, while the VB-IVFA and VF-IALO algorithms used an omnidirectional sensing model, so direct comparison cannot be made. We modified the VB-IVFA and VF-IALO algorithms using a method from reference [
12] to make them applicable to directed sensor networks. The simulation parameters of each algorithm are shown in
Table 1.
The maximum number of iterations (
), maximum step size (
), and population size (
) are key parameters of the proposed algorithm, which determine the position and moving distance of the sensor. We referred to the methods in references [
27,
29] and set
to 0.5 m/iter,
to 30. The setting of the maximum number of iterations is very important. If
is too large, it will slow down the running speed, and if it is too small, it will not be able to search for the optimal solution. In this section, we experimentally verify the impact of different
values on coverage rate (COVR). As shown in
Table 2, as
increases, COVR is optimized, but when
exceeds 50, the optimization effect actually decreases. According to the experimental results, the algorithm performs best when
is 50. Therefore, we set the maximum number of iterations to 50.
Figure 5 shows a visual example of executing the proposed method. In this simulation experiment, stationary and mobile sensors were randomly deployed in an ROI of size 200 m × 200 m. The gray sector in
Figure 5 represents the stationary sensor, while the blue sector represents the moving sensor. The green curve represents the MEP that was searched for.
Figure 5a shows the initial state of the sensor.
Figure 5b shows the result of adjusting the sensing direction. The result of one iteration of the algorithm is shown in
Figure 5c. The final result after the iteration is shown in
Figure 5d.
5.1. Comparison of Coverage Rate
Coverage is an important performance indicator for measuring the effectiveness of coverage enhancement. To verify the performance of the proposed method in terms of coverage, we designed three sets of simulation experiments. We verified the effects of sensor quantity, sensing angle, and sensing radius on coverage in three monitoring areas of different sizes. When setting simulation experiment parameters, the variable is either the number of sensors, sensing angle, or sensing radius, while the other two are constants. The range of values for these three parameters is shown in
Table 3.
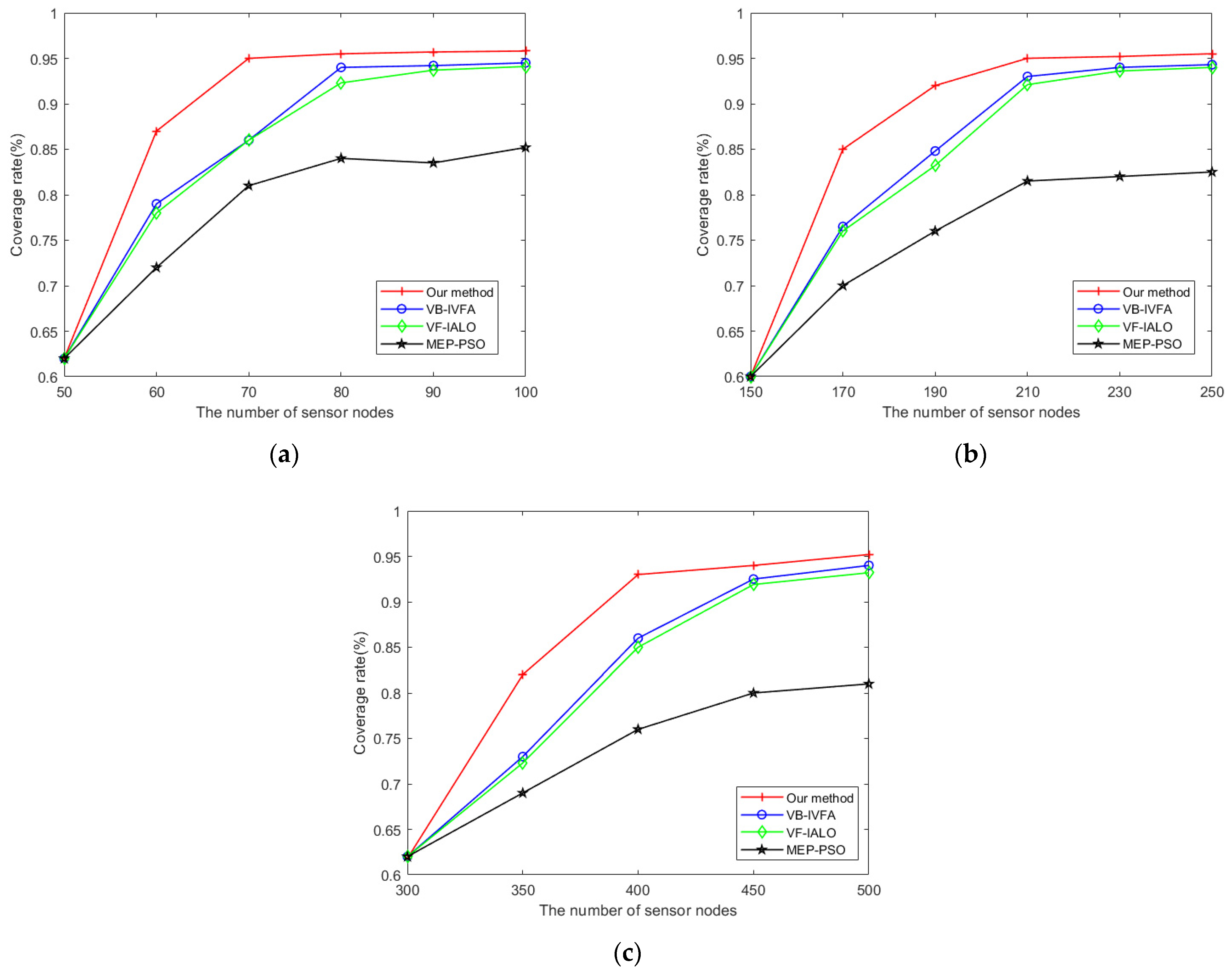
As shown in
Figure 6, when the number of sensors is small, the coverage of all four algorithms is low. When the density of sensors is low, not enough schedulable mobile sensors can be found, resulting in some coverage holes that cannot be repaired. With the increase in the number of sensors, the coverage rate of all four algorithms is greatly improved. Under the same conditions, our method outperforms the other three methods in terms of coverage rate. VB-IVFA, VF-IALO, and MEP-PSO only use mobile sensors for coverage enhancement without considering rotating sensors. Our method adds the step of rotating the sensor, so it has a certain advantage in terms of coverage rate.
Figure 7 shows the impact of the sensing angle on coverage. As the sensing angle increases, the coverage rate of the four algorithms also increases. The increase in sensor sensing angle means that the coverage range of the sensor also expands. When the number of sensors is the same, the coverage range is higher. The results of
Figure 7 indicate that the coverage increases rapidly when the sensing angle increases from 60 degrees to 120 degrees. When the sensing angle continues to increase from 120 degrees, the improvement in coverage rate is not significant. Under the same conditions, our method has a higher coverage rate than the other three methods.
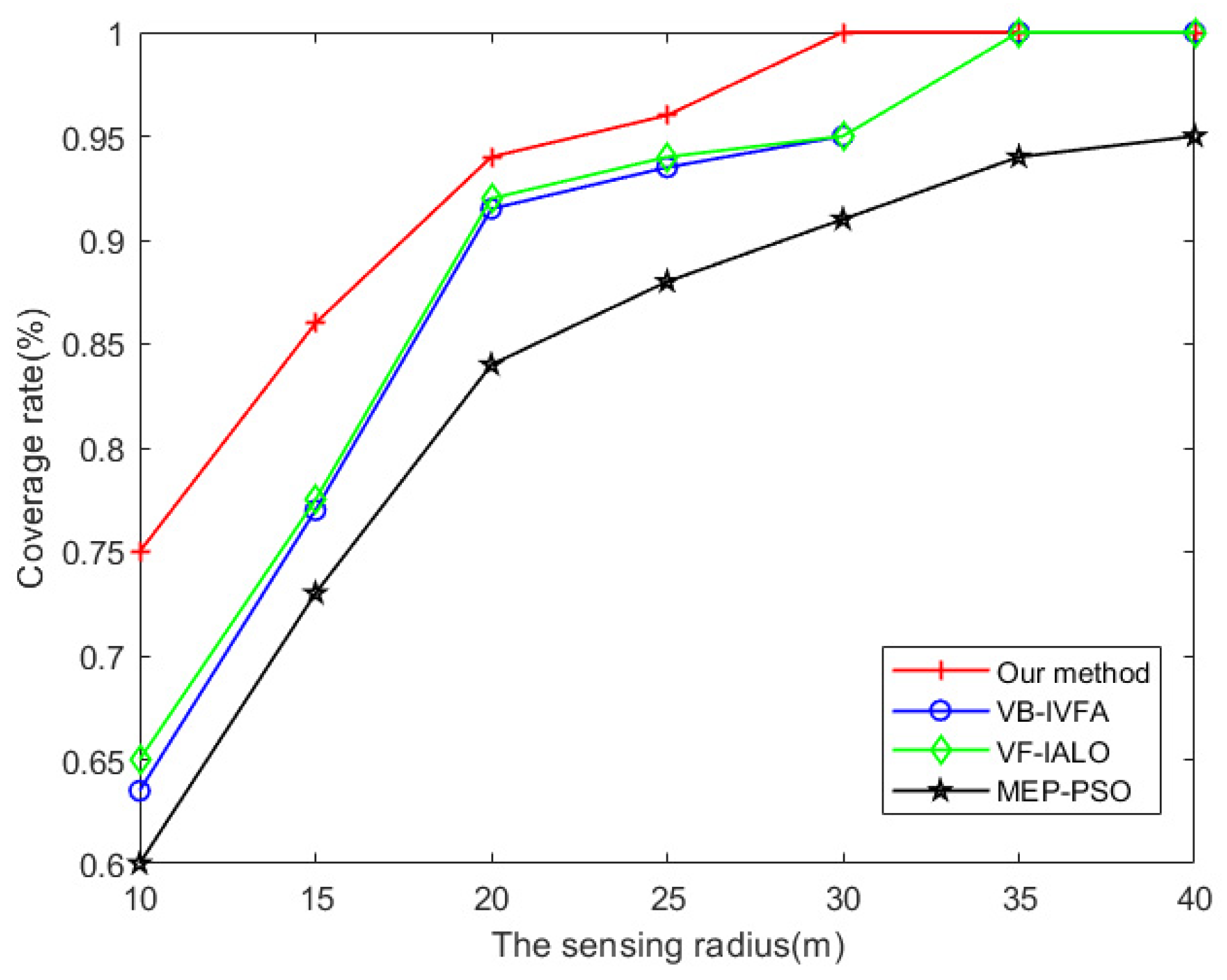
From
Figure 8, it can be seen that the sensing radius has an impact on coverage. Like the sensing angle, the sensing radius is positively correlated with the coverage rate. In experiments using the same sensing radius, the proposed method achieved a higher coverage rate than the three compared algorithms. The coverage rate of all algorithms increases with the increase in sensing radius.
We compared the results of the proposed method with the theoretical CUB, which from another perspective demonstrates that the proposed method has good coverage performance. As shown in
Figure 9, as the number of iterations increases, the coverage of our method tends to approach the CUB. With a sufficient number of sensors, our method can achieve the theoretical maximum value through multiple iterations.
The experimental results in this section indicate that the proposed method outperforms the other three methods in terms of coverage rate. The proposed method consists of two stages, each of which can improve the effective coverage range. Therefore, compared to the other three methods, it has a higher coverage rate.
5.2. Comparison of Coverage Efficiency and Redundancy Rate
This experiment separately calculated the coverage efficiency of VB-IVFA, VF-IALO, MEP-PSO, and the proposed method. To avoid the influence of errors, we conducted multiple experiments in environments with different ROIs and node densities. The experimental results are shown in
Table 4.
According to the analysis of the data in
Table 4, it can be seen that within the same ROI, the coverage efficiency of the four algorithms tends to decrease with the increase in the number of sensors. The increased number of sensors will inevitably lead to an increase in redundant coverage, resulting in a decrease in coverage efficiency. By comparing the results of three different ROIs, it can be found that our method outperforms the other three methods in terms of coverage efficiency. Our method prioritizes overlapping coverage when repairing coverage holes, resulting in lower redundancy coverage. In addition, redundancy can be reduced, and coverage efficiency can be improved during the rotation sensing direction stage.
In this section, we also compared the redundancy rate and redundancy area of different algorithms. As shown in
Figure 10, the proposed method reduces the redundancy rate to below 10% after multiple iterations, which is significantly better than other methods. Because the MEP-PSO algorithm can only optimize the redundant coverage of two nodes at a time, its redundancy rate is higher than that of the other methods.
The performance of the algorithm in terms of coverage efficiency and redundancy was verified through experiments in this section. Compared with other methods, our approach has higher coverage efficiency. Our algorithm’s experimental results indicate that the sensors in the network have been fully utilized and have a high energy utilization rate.
5.3. Comparison of Moving Distance
Energy consumption is an important indicator for evaluating the performance of coverage enhancement methods. During the process of node redeployment, moving energy consumption accounts for the vast majority of the total. Other energy consumption (communication, rotation) can be almost negligible. Therefore, the performance of the algorithm in terms of energy consumption can be determined by comparing the moving distance. In this experiment, the parameter settings are consistent with the previous experiment, and we compare the experimental results with the other three methods.
Figure 11 shows the effects of the number of sensors, sensing angle, and sensing radius on the total moving distance. The total moving distance is negatively correlated with the above three parameters. The larger the number of sensors, sensing angle, and sensing radius, the smaller the total moving distance. Specifically, the total moving distance of the proposed method is the smallest; that of VB-IVFA and VF-IALO is slightly larger than that of the proposed method. The total moving distance of the MEP-PSO algorithm is the largest, as MEP-PSO focuses more on reducing redundancy and can only move one sensor at a time. The proposed method can expand the coverage range and reduce the area of coverage holes by rotating the stationary sensor. Therefore, the performance of the proposed method is superior to that of VB-IVFA and VF-IALO.
Uniformity of moving distance (UMD) can reflect the algorithm’s performance in terms of energy balance. Maximum moving distance (MMD) is also an indicator for evaluating the effectiveness of algorithms. Therefore, we designed a set of experiments to calculate UMD and MMD using different methods.
Table 5 compares the performance of the four algorithms on the TMD, UMD, and MMD metrics. It can be seen that the proposed method outperforms the compared methods in these three indicators. The advantages in MMD and UMD metrics indicate that the proposed method is more in line with the requirements of network energy balance. Under the same conditions, the network optimized by the proposed method has a longer network lifetime.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}