
Object and Event Detection Pipeline for Rink Hockey Games


 ,
,  ,
,  ,
,  ,
,  and
and 
Abstract
1. Introduction
2. Computer Vision Applied to Hockey Sports
3. Automatic Pipeline for Object and Event Detection in Rink Hockey Games
- Object detection capabilities for player tracking, ball tracking, and video analysis.
- Real-time performance for updating object detections regularly during fast-paced games.
- Ability to handle diversity in the appearance of objects due to factors such as lighting conditions, player uniforms, and background noise.
- High accuracy in object detection.
- High speed response in object detection.
- Compatibility with specialized hardware such as GPUs.
- Adaptability to different environments and lighting conditions.
- Ability to detect and represent major events based on the stream of visual objects.
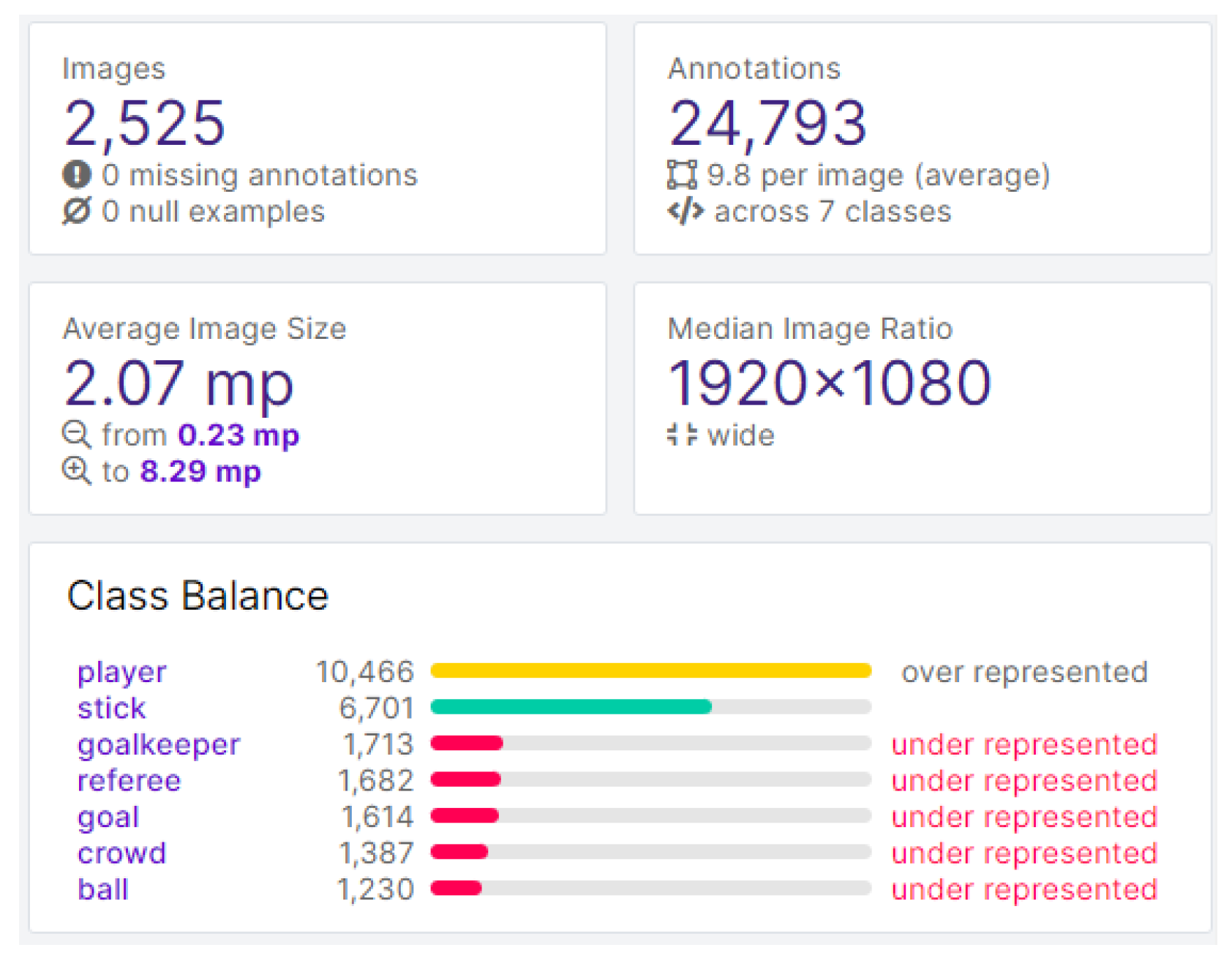
3.1. Dataset Organization
3.2. Object Detection Model
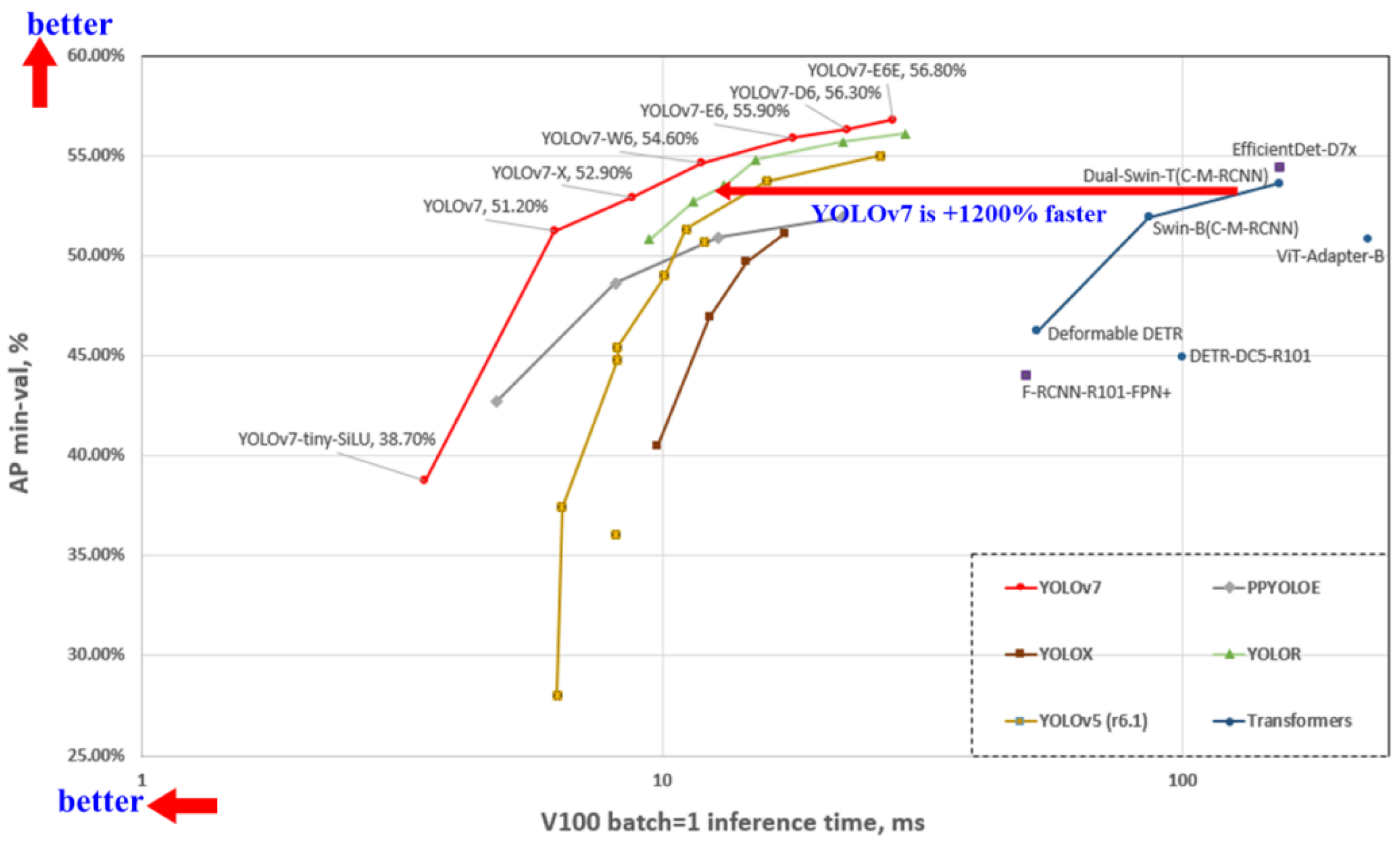
3.2.1. YOLOv7
3.2.2. Object Detection for Rink Hockey
3.3. Event Detection Rules Module
- Filtering: due to the noisy nature of the object detection model, a filtering operator, such as a windowed spatio-temporal median filter, can be used as a pre-processing stage before the application of a rule-based detector.
- Model-based Rule Detection: rule-based system that can detect predefined types of events.
- Representation: the language or taxonomy used to represent the events. Event calculus is a formal method of event representation [39].
- Revision: can be used to revise or update represented event beliefs due to new information available in the stream of detected visual objects.
4. Experiments and Evaluation
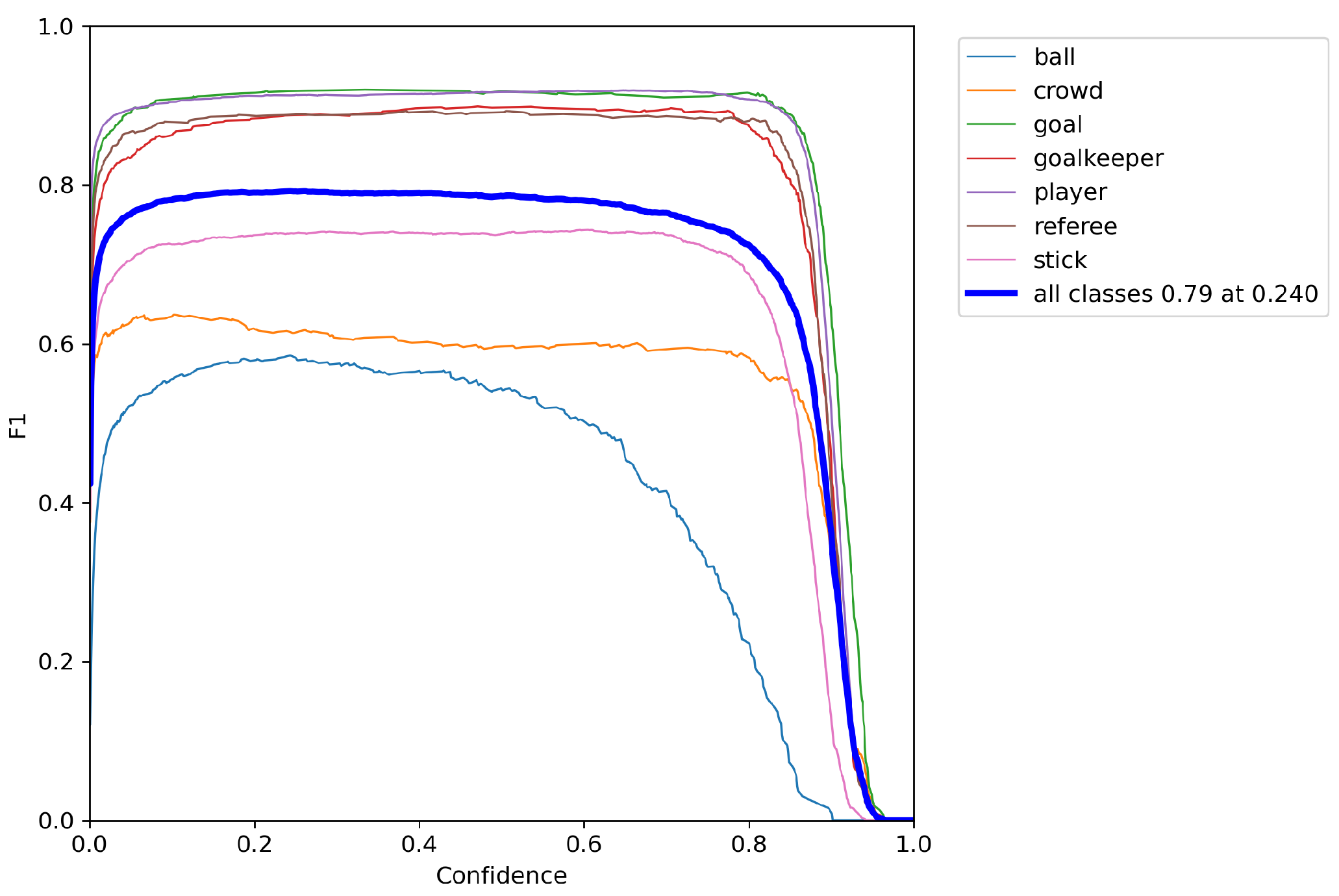
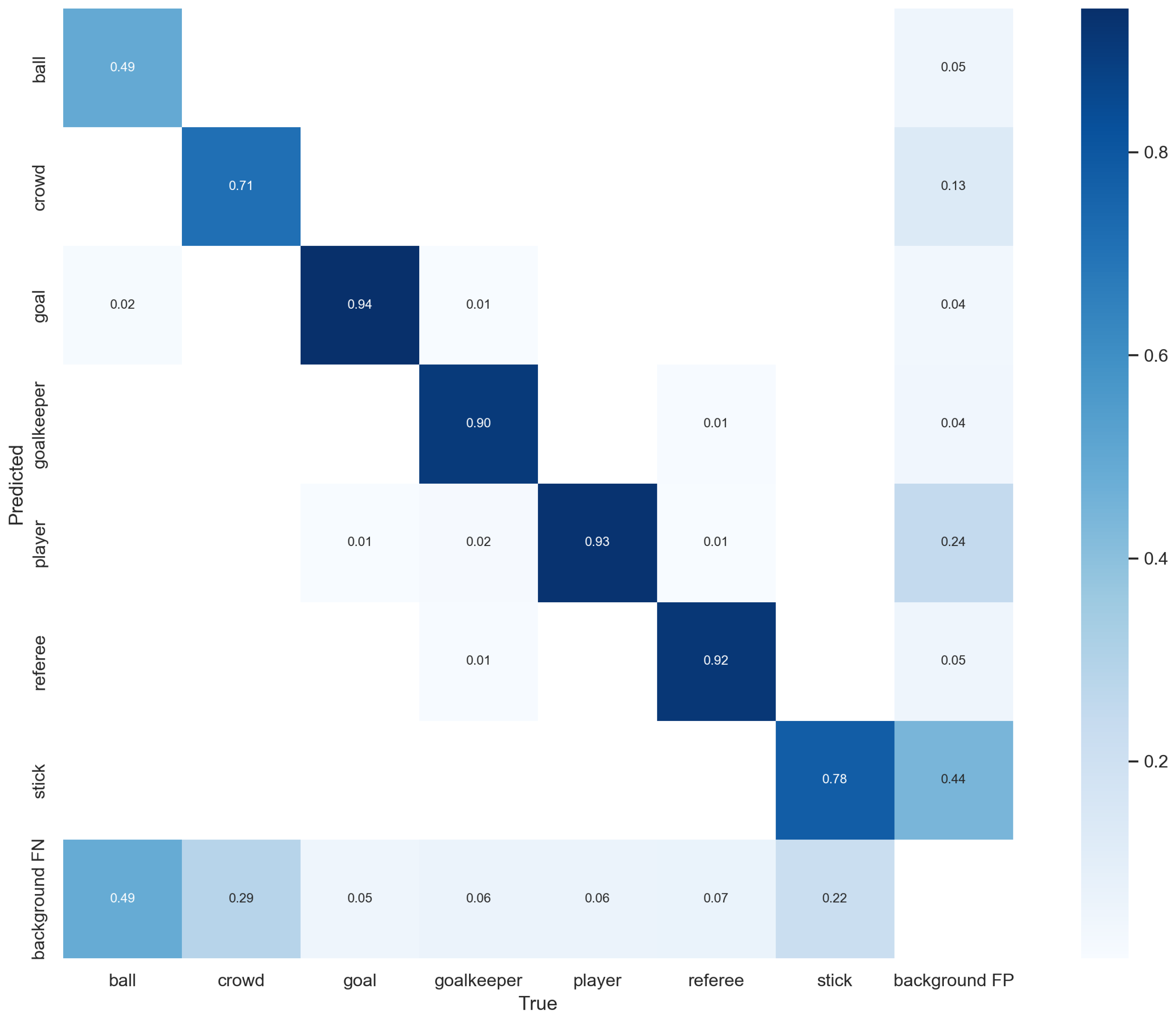
4.1. Object Detection
4.2. Event Detection
| Algorithm 1 Function Implementing Rule for Direct Free Hit or Penalty Detection |
| inputs: , the current time; , temporal window duration for event searching |
| returns: if detects the event or if not |
| function direct_free_hit_or_penalty_rule() |
| update_objects_detected() ▹ Gets the automatically annotated detected list of visual objects, updated and timestamped |
| if then |
| return |
| else |
| return |
| end if |
| end function |
- Predicate is satisfied by the visual object of class referee;
- Predicate is satisfied by the visual object of class goal;
- Predicate is satisfied by the visual object of class goalkeeper;
- Predicate is satisfied by the presence of exactly one instance of class player per frame;
- Predicate is satisfied by the truthfulness of f, where in at least one frame within the time interval and according to the test criteria adopted.

5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zou, Z.; Chen, K.; Shi, Z.; Guo, Y.; Ye, J. Object detection in 20 years: A survey. Proc. IEEE 2023, 111, 257–276. [Google Scholar] [CrossRef]
- Li, Z.; Liu, F.; Yang, W.; Peng, S.; Zhou, J. A survey of convolutional neural networks: Analysis, applications, and prospects. IEEE Trans. Neural Netw. Learn. Syst. 2021, 33, 6999–7019. [Google Scholar] [CrossRef] [PubMed]
- Srivastava, S.; Divekar, A.V.; Anilkumar, C.; Naik, I.; Kulkarni, V.; Pattabiraman, V. Comparative analysis of deep learning image detection algorithms. J. Big Data 2021, 8, 66. [Google Scholar] [CrossRef]
- Shorten, C.; Khoshgoftaar, T.M. A survey on image data augmentation for deep learning. J. Big Data 2019, 6, 60. [Google Scholar] [CrossRef]
- Vats, K.; Walters, P.; Fani, M.; Clausi, D.A.; Zelek, J.S. Player tracking and identification in ice hockey. Expert Syst. Appl. 2023, 213, 119250. [Google Scholar] [CrossRef]
- Guo, T.; Tao, K.; Hu, Q.; Shen, Y. Detection of ice hockey players and teams via a two-phase cascaded CNN model. IEEE Access 2020, 8, 195062–195073. [Google Scholar] [CrossRef]
- Sousa, T.; Sarmento, H.; Harper, L.D.; Valente-Dos-Santos, J.; Vaz, V. Match analysis in rink hockey: A systematic review. Hum. Mov. 2022, 23, 33–48. [Google Scholar] [CrossRef]
- Bergmann, P.; Meinhardt, T.; Leal-Taixe, L. Tracking without bells and whistles. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 941–951. [Google Scholar]
- Bewley, A.; Ge, Z.; Ott, L.; Ramos, F.; Upcroft, B. Simple online and realtime tracking. In Proceedings of the 2016 IEEE International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 September 2016; IEEE: New York, NY, USA, 2016; pp. 3464–3468. [Google Scholar]
- Brasó, G.; Leal-Taixé, L. Learning a neural solver for multiple object tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 6247–6257. [Google Scholar]
- Wojke, N.; Bewley, A.; Paulus, D. Simple online and realtime tracking with a deep association metric. In Proceedings of the 2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017; IEEE: New York, NY, USA, 2017; pp. 3645–3649. [Google Scholar]
- Zhang, Y.; Wang, C.; Wang, X.; Zeng, W.; Liu, W. Fairmot: On the fairness of detection and re-identification in multiple object tracking. Int. J. Comput. Vis. 2021, 129, 3069–3087. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. Adv. Neural Inf. Process. Syst. 2015, 28. [Google Scholar] [CrossRef] [PubMed]
- Law, H.; Deng, J. Cornernet: Detecting objects as paired keypoints. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 734–750. [Google Scholar]
- Lu, K.; Chen, J.; Little, J.J.; He, H. Lightweight convolutional neural networks for player detection and classification. Comput. Vis. Image Underst. 2018, 172, 77–87. [Google Scholar] [CrossRef]
- Yang, X. Where Is the Puck? Tiny and Fast-Moving Object Detection in Videos. Master’s Thesis, McGill University, Montréal, QC, Canada, 2021. [Google Scholar]
- Nguyen, D.T.; Nguyen, T.N.; Kim, H.; Lee, H.J. A high-throughput and power-efficient FPGA implementation of YOLO CNN for object detection. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2019, 27, 1861–1873. [Google Scholar] [CrossRef]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar]
- Mazzeo, P.L.; Spagnolo, P.; Leo, M.; D’Orazio, T. Visual Players Detection and Tracking in Soccer Matches. In Proceedings of the 2008 IEEE Fifth International Conference on Advanced Video and Signal Based Surveillance, Santa Fe, NM, USA, 1–3 September 2008; pp. 326–333. [Google Scholar] [CrossRef]
- Wang, C.Y.; Bochkovskiy, A.; Liao, H.Y.M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors. arXiv 2022, arXiv:2207.02696. [Google Scholar]
- Lopes, J.M.; Mota, L.P.; Mota, S.M.; Torres, J.M. Roller Hockey Dataset. 2024. Available online: https://universe.roboflow.com/visao-computacional/roller-hockey (accessed on 1 September 2023).
- Roboflow. Roboflow Universe. 2023. Available online: https://universe.roboflow.com (accessed on 1 May 2023).
- Terven, J.; Córdova-Esparza, D.M.; Romero-González, J.A. A Comprehensive Review of YOLO Architectures in Computer Vision: From YOLOv1 to YOLOv8 and YOLO-NAS. Mach. Learn. Knowl. Extr. 2023, 5, 1680–1716. [Google Scholar] [CrossRef]
- Chris Hughes and Bernat Puig Camps. YOLOv7: A Deep Dive into the Current State-of-the-Art for Object Detection, Everything You Need to Know to Use YOLOv7 in Custom Training Scripts. 2022. Available online: https://towardsdatascience.com/yolov7-a-deep-dive-into-the-current-state-of-the-art-for-object-detection-ce3ffedeeaeb (accessed on 1 September 2023).
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft COCO: Common Objects in Context. In Proceedings of the Computer Vision—ECCV 2014, Zurich, Switzerland, 6–12 September 2014; Fleet, D., Pajdla, T., Schiele, B., Tuytelaars, T., Eds.; Springer: Cham, Switzerland, 2014; pp. 740–755. [Google Scholar]
- Paszke, A.; Gross, S.; Chintala, S.; Chanan, G.; Yang, E.; DeVito, Z.; Lin, Z.; Desmaison, A.; Antiga, L.; Lerer, A. Automatic differentiation in PyTorch. In Proceedings of the NIPS-W, 2017, Long Beach, CA, USA, 4–9 December 2017. [Google Scholar]
- Porto, F. Vitória ÉPICA do Hóquei em Patins do FC Porto (Resumo). 2022. Available online: https://youtu.be/JRe0iIi55Ig (accessed on 19 January 2023).
- D’hoquei, S. Resum del GSH Trissino vs. Credit Agricole Sarzana. 2020. Available online: https://youtu.be/k3cFN_Y2prc (accessed on 19 January 2023).
- D’hoquei, S. Highlights Portugal vs. France. 2022. Available online: https://youtu.be/Jbjut3NvCGg (accessed on 19 January 2023).
- TV, F. Hóquei em Patins: Física × CRIAR-T—25 de Abril 18h30. 2022. Available online: https://youtu.be/YZMHSuskcCg (accessed on 19 January 2023).
- Euro Rink Hockey TV. FC Porto × SL Benfica. 2018. Available online: https://youtu.be/jnFRrurson0 (accessed on 19 January 2023).
- Euro Rink Hockey TV. FC Porto (PT) × Sporting CP (PT). 2018. Available online: https://youtu.be/uIsaU7ME8h4 (accessed on 19 January 2023).
- FC Barcelona. [ESP] LIGA EUROPEA Hockey Patines: FC Barcelona Lassa—FC Oporto (3-1). 2017. Available online: https://youtu.be/zGXZaarw5BE (accessed on 19 January 2023).
- Euro Rink Hockey TV. Euroleague—Barça (SP) × SL Benfica (PT). 2020. Available online: https://youtu.be/yTe1Hv9OV-w (accessed on 19 January 2023).
- Euro Rink Hockey TV. BENFICA-BARCELONA, 1st Semi-Final of Rink Hockey Euroleague 2015–2016, Played at Pavilhão. 2016. Available online: https://youtu.be/hTNZm1CGww4 (accessed on 19 January 2023).
- Euro Rink Hockey TV. Match #249—Spain × Portugal [HD]. 2021. Available online: https://youtu.be/fKDWzskg2pE (accessed on 19 January 2023).
- NVIDIA. NVIDIA CUDA Deep Neural Network Library (cuDNN). 2023. Available online: https://developer.nvidia.com/cudnn (accessed on 1 September 2023).
- Shanahan, M. The Event Calculus Explained. Artif. Intell. Lnai 2000, 1600, 409–430. [Google Scholar] [CrossRef]
- D’hoquei, S. Highlights SL Benfica vs. Sporting CP. 2022. Available online: https://youtu.be/CS4P8hkM8vk (accessed on 19 January 2023).
- Euro Rink Hockey TV. Extended Highlights—Match #243—France × Portugal [HD]. 2022. Available online: https://youtu.be/S0fSwSclAsE (accessed on 19 January 2023).
- Rink Hockey Technical Commission. Rink Hockey Official Regulation; Technical Report; World Skate: Montpellier, France, 2020.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sport | Dataset | Detection Type | Performance | |
|---|---|---|---|---|
| Vats [5] | Ice Hockey | 84 NHL Games | PT (CNN) | 83% (Acc.) |
| Guo [6] | Ice Hockey | 6 2018 Winter Olympics Games | PT (CNN) | 93.05% (Acc.) |
| Lu [16] | Ice Hockey Soccer Basketball | 2 Ice Hockey Games 2 Soccer Games APIDIS SPIROUDOME | OD (CNN) | 94.6% (Acc.) |
| Yang [17] | Ice Hockey | 5 NHL Games | OD (CNN) | 88.7% (F1) |
| Mazzeo [20] | Soccer | CAVIAR | BSOS, PT | 94.7% (Acc. 1) |
| Ours | Rink Hockey | 2525 Rink Hockey Game Frames [22] | OD, ED (YOLOv7) | 80% (Acc.) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lopes, J.M.; Mota, L.P.; Mota, S.M.; Torres, J.M.; Moreira, R.S.; Soares, C.; Pereira, I.; Gouveia, F.R.; Sobral, P. Object and Event Detection Pipeline for Rink Hockey Games. Future Internet 2024, 16, 179. https://doi.org/10.3390/fi16060179
Lopes JM, Mota LP, Mota SM, Torres JM, Moreira RS, Soares C, Pereira I, Gouveia FR, Sobral P. Object and Event Detection Pipeline for Rink Hockey Games. Future Internet. 2024; 16(6):179. https://doi.org/10.3390/fi16060179
Chicago/Turabian StyleLopes, Jorge Miguel, Luis Paulo Mota, Samuel Marques Mota, José Manuel Torres, Rui Silva Moreira, Christophe Soares, Ivo Pereira, Feliz Ribeiro Gouveia, and Pedro Sobral. 2024. "Object and Event Detection Pipeline for Rink Hockey Games" Future Internet 16, no. 6: 179. https://doi.org/10.3390/fi16060179
APA StyleLopes, J. M., Mota, L. P., Mota, S. M., Torres, J. M., Moreira, R. S., Soares, C., Pereira, I., Gouveia, F. R., & Sobral, P. (2024). Object and Event Detection Pipeline for Rink Hockey Games. Future Internet, 16(6), 179. https://doi.org/10.3390/fi16060179