

Nonlinear Dynamics and Machine Learning for Robotic Control Systems in IoT Applications




Abstract
1. Introduction
2. Materials and Methods
2.1. Mathematical Foundation and Dynamic Modeling
- is the inertia matrix, influenced by the robot’s configuration;
- represents the joint accelerations;
- represents the Coriolis and centrifugal forces, dependent on both the position and velocities of the joints;
- is the gravitational force vector, depending solely on its configuration;
- is the control input vector (torques or forces).
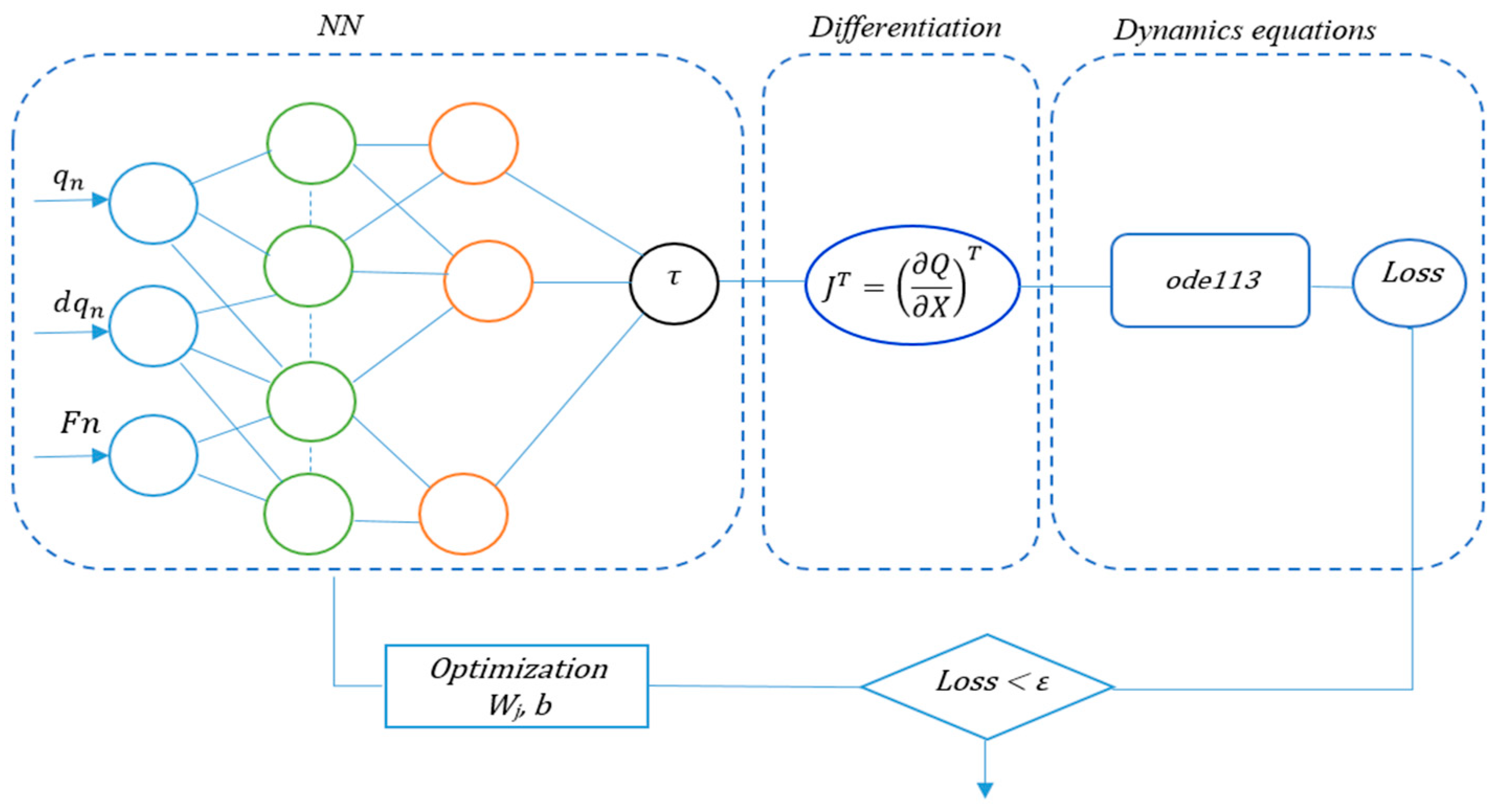
2.2. Integrating Nonlinear Methods with Neural Networks
| Algorithm 1 Predict Function |
|
2.3. Adams–Bashforth–Moulton Method for Nonlinear Dynamics
- p is the position and orientation of the end-effector in the task space;
- q is the vector of the joint angles in the configuration space;
- f is the forward kinematics function.
3. Results
4. Simulations
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Song, Q.; Zhao, Q. Recent Advances in Robotics and Intelligent Robots Applications. Appl. Sci. 2024, 14, 4279. [Google Scholar] [CrossRef]
- Zaitceva, I.; Andrievsky, B. Methods of Intelligent Control in Mechatronics and Robotic Engineering: A Survey. Electronics 2022, 11, 2443. [Google Scholar] [CrossRef]
- Wang, Y.; Hou, M.; Plataniotis, K.N.; Kwong, S.; Leung, H.; Tunstel, E.; Rudas, I.J.; Trajkovic, L. Towards a Theoretical Framework of Autonomous Systems Underpinned by Intelligence and Systems Sciences. IEEE/CAA J. Autom. Sin. 2021, 8, 52–63. [Google Scholar] [CrossRef]
- Gabsi, A.E.H. Integrating Artificial Intelligence in Industry 4.0: Insights, Challenges, and Future Prospects—A Literature Review. Ann. Oper. Res. 2024. [Google Scholar] [CrossRef]
- Antoska Knights, V.; Gacovski, Z. Methods for Detection and Prevention of Vulnerabilities in the IoT (Internet of Things) Systems. In Internet of Things—New Insights; IntechOpen: London, UK, 2024. [Google Scholar] [CrossRef]
- Knights, V.; Petrovska, O.; Prchkovska, M. Enhancing Smart Parking Management through Machine Learning and AI Integration in IoT Environments. In Navigating the Internet of Things in the 22nd Century—Concepts, Applications, and Innovations [Working Title]; IntechOpen: London, UK, 2024. [Google Scholar] [CrossRef]
- Chataut, R.; Phoummalayvane, A.; Akl, R. Unleashing the Power of IoT: A Comprehensive Review of IoT Applications and Future Prospects in Healthcare, Agriculture, Smart Homes, Smart Cities, and Industry 4.0. Sensors 2023, 23, 7194. [Google Scholar] [CrossRef] [PubMed]
- Sadeghzadeh, N.; Farajzadeh, N.; Dattatri, N.; Acevedo, B.P. SPS Vision Net: Measuring Sensory Processing Sensitivity via an Artificial Neural Network. Cogn. Comput. 2024, 16, 1379–1392. [Google Scholar] [CrossRef]
- Sarker, I.H. Machine Learning: Algorithms, Real-World Applications and Research Directions. SN Comput. Sci. 2021, 2, 160. [Google Scholar] [CrossRef]
- Khanna, A.; Kaur, S. Internet of Things (IoT), Applications and Challenges: A Comprehensive Review. Wirel. Pers. Commun. 2020, 114, 1687–1762. [Google Scholar] [CrossRef]
- El-Hussieny, H. Real-Time Deep Learning-Based Model Predictive Control of a 3-DOF Biped Robot Leg. Sci. Rep. 2024, 14, 16243. [Google Scholar] [CrossRef]
- Knights, V.; Petrovska, O. Dynamic Modeling and Simulation of Mobile Robot Under Disturbances and Obstacles in an Environment. J. Appl. Math. Comput. 2024, 8, 59–67. [Google Scholar] [CrossRef]
- Antoska Knights, V.; Gacovski, Z.; Deskovski, S. Guidance and Control System for Platoon of Autonomous Mobile Robots. J. Electr. Eng. 2018, 6, 281–288. [Google Scholar] [CrossRef]
- Richards, S.M.; Azizan, N.; Slotine, J.-J.; Pavone, M. Adaptive-Control-Oriented Meta-Learning for Nonlinear Systems. arXiv 2021, arXiv:2103.04490. Available online: https://arxiv.org/abs/2103.04490 (accessed on 1 September 2024).
- Knights, V.; Prchkovska, M. From Equations to Predictions: Understanding the Mathematics and Machine Learning of Multiple Linear Regression. J. Math. Comput. Appl. 2024, 3, 137. [Google Scholar] [CrossRef]
- Sakaguchi, H. Machine Learning of Nonlinear Dynamical Systems with Control Parameters Using Feedforward Neural Networks. arXiv 2024, arXiv:2409.07468. [Google Scholar] [CrossRef]
- Meindl, M.; Lehmann, D.; Seel, T. Bridging Reinforcement Learning and Iterative Learning Control: Autonomous Motion Learning for Unknown, Nonlinear Dynamics. Front. Robot. AI 2022, 9, 793512. [Google Scholar] [CrossRef]
- Lewis, F.L.; Jagannathan, S.; Yesildirek, A. Neural Network Control of Robot Manipulators and Nonlinear Systems; Taylor & Francis Ltd.: London, UK, 1999; ISBN 0-7484-0596-8. [Google Scholar]
- Sayeed, A.; Verma, C.; Kumar, N.; Koul, N.; Illés, Z. Approaches and Challenges in Internet of Robotic Things. Future Internet 2022, 14, 265. [Google Scholar] [CrossRef]
- Afanasyev, I.; Mazzara, M.; Chakraborty, S.; Zhuchkov, N.; Maksatbek, A.; Kassab, M.; Distefano, S. Towards the Internet of Robotic Things: Analysis, Architecture, Components and Challenges. In Proceedings of the 2019 IEEE International Conference on Developments in eSystems Engineering (DeSE), Kazan, Russia, 7–10 October 2019. [Google Scholar] [CrossRef]
- Sikder, A.K.; Petracca, G.; Aksu, H.; Jaeger, T.; Uluagac, A.S. A Survey on Sensor-Based Threats to Internet-of-Things (IoT) Devices and Applications. arXiv 2018, arXiv:1802.02041. Available online: https://www.researchgate.net/publication/322975901 (accessed on 15 September 2024).
- Vermesan, O.; Bahr, R.; Ottella, M.; Serrano, M.; Karlsen, T.; Wahlstrøm, T.; Sand, H.E.; Ashwathnarayan, M.; Gamba, M.T. Internet of Robotic Things Intelligent Connectivity and Platforms. Front. Robot. AI 2020, 7, 104. [Google Scholar] [CrossRef]
- Antoska, V.; Jovanović, K.; Petrović, V.M.; Baščarević, N.; Stankovski, M. Balance Analysis of the Mobile Anthropomimetic Robot Under Disturbances—ZMP Approach. Int. J. Adv. Robot. Syst. 2013, 10, 206. [Google Scholar] [CrossRef]
- Yuan, L.; Ni, Y.-Q.; Deng, X.-Y.; Hao, S. A-PINN: Auxiliary Physics Informed Neural Networks for Forward and Inverse Problems of Nonlinear Integro-Differential Equations. J. Comput. Phys. 2022, 462, 111260. [Google Scholar] [CrossRef]
- Pascal, C.; Raveica, L.-O.; Panescu, D. Robotized Application Based on Deep Learning and Internet of Things. In Proceedings of the 2018 22nd International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 10–12 October 2018. [Google Scholar] [CrossRef]
- Li, Q.; Sompolinsky, H. Statistical Mechanics of Deep Linear Neural Networks: The Backpropagating Kernel Renormalization. Phys. Rev. X 2021, 11, 031059. [Google Scholar] [CrossRef]
- Meng, X.; Li, Z.; Zhang, D.; Karniadakis, G.E. PPINN: Parareal Physics-Informed Neural Network for Time-Dependent PDEs. arXiv 2019, arXiv:1909.10145. [Google Scholar] [CrossRef]
- Gardašević, G.; Katzis, K.; Bajić, D.; Berbakov, L. Emerging Wireless Sensor Networks and Internet of Things Technologies—Foundations of Smart Healthcare. Sensors 2020, 20, 3619. [Google Scholar] [CrossRef] [PubMed]
- Coronado, E.; Venture, G. Towards IoT-Aided Human–Robot Interaction Using NEP and ROS: A Platform-Independent, Accessible and Distributed Approach. Sensors 2020, 20, 1500. [Google Scholar] [CrossRef]
- Yilmaz, N.; Wu, J.Y.; Kazanzides, P.; Tumerdem, U. Neural Network-Based Inverse Dynamics Identification and External Force Estimation on the da Vinci Research Kit. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020. [Google Scholar] [CrossRef]
- Antoska Knights, V.; Stankovski, M.; Nusev, S.; Temeljkovski, D.; Petrovska, O. Robots for safety and health at work. Mech. Eng.—Sci. J. 2015, 33, 275–279. [Google Scholar]
- Chen, S.; Wen, J.T. Industrial Robot Trajectory Tracking Control Using Multi-Layer Neural Networks Trained by Iterative Learning Control. Robotics 2021, 10, 50. [Google Scholar] [CrossRef]
- Li, J.; Su, J.; Yu, W.; Mao, X.; Liu, Z.; Fu, H. Recurrent Neural Network for Trajectory Tracking Control of Manipulator with Unknown Mass Matrix. Front. Neurorobotics 2024, 18, 1451924. [Google Scholar] [CrossRef]
- Zheng, X.; Ding, M.; Liu, L.; Guo, J.; Guo, Y. Recurrent Neural Network Robust Curvature Tracking Control of Tendon-Driven Continuum Manipulators with Simultaneous Joint Stiffness Regulation. Nonlinear Dyn. 2024, 112, 11067–11084. [Google Scholar] [CrossRef]
- Dhanaraju, M.; Chenniappan, P.; Ramalingam, K.; Pazhanivelan, S.; Kaliaperumal, R. Smart Farming: Internet of Things (IoT)-Based Sustainable Agriculture. Agriculture 2022, 12, 1745. [Google Scholar] [CrossRef]
- Amertet Finecomess, S.; Gebresenbet, G.; Alwan, H.M. Utilizing an Internet of Things (IoT) Device, Intelligent Control Design, and Simulation for an Agricultural System. IoT 2024, 5, 58–78. [Google Scholar] [CrossRef]
- Friha, O.; Ferrag, M.A.; Shu, L.; Maglaras, L.; Wang, X. Internet of Things for the Future of Smart Agriculture: A Comprehensive Survey of Emerging Technologies. IEEE/CAA J. Autom. Sin. 2021, 8, 718–752. [Google Scholar] [CrossRef]
- GeeksforGeeks. Architecture of Internet of Things (IoT). GeeksforGeeks. 2024. Available online: https://www.geeksforgeeks.org/architecture-of-internet-of-things-iot/ (accessed on 29 September 2024).
- Antoska, V.; Potkonjak, V.; Stankovski, M.J.; Baščarević, N. Robustness of Semi-Humanoid Robot Posture with Respect to External Disturbances. Facta Univ. Ser. Autom. Control Robot. 2012, 11, 99–110. [Google Scholar]
- Lagrange Equations (in Mechanics); Encyclopedia of Mathematics; EMS Press: Berlin, Germany, 2001; Available online: https://encyclopediaofmath.org/wiki/Euler-Lagrange_equation (accessed on 20 September 2024).
- Weisstein, E.W. Euler-Lagrange Differential Equation. In MathWorld; Wolfram Research, Inc.: Champaign, IL, USA, 2024; Available online: https://mathworld.wolfram.com/Euler-LagrangeDifferentialEquation.html (accessed on 20 September 2024).
- Antoska-Knights, V.; Gacovski, Z.; Deskovski, S. Obstacles Avoidance Algorithm for Mobile Robots, Using the Potential Fields Method. Univ. J. Electr. Electron. Eng. 2017, 5, 75–84. [Google Scholar] [CrossRef]
- Patil, S.; Vasu, V.; Srinadh, K.V.S. Advances and Perspectives in Collaborative Robotics: A Review of Key Technologies and Emerging Trends. Discov. Mech. Eng. 2023, 2, 13. [Google Scholar] [CrossRef]
- Piga, D.; Bemporad, A. New Trends in Modeling and Control of Hybrid Systems. Int. J. Robust Nonlinear Control 2020, 30, 5775–5776. [Google Scholar] [CrossRef]
- Roy, S.; Rana, D. Machine Learning in Nonlinear Dynamical Systems. Resonance 2021, 26, 953–970. [Google Scholar] [CrossRef]
- Gilpin, W. Generative Learning for Nonlinear Dynamics. Nat. Rev. Phys. 2024, 6, 194–206. [Google Scholar] [CrossRef]
- Tang, C.; Abbatematteo, B.; Hu, J.; Chandra, R.; Martín-Martín, R.; Stone, P. Deep Reinforcement Learning for Robotics: A Survey of Real-World Successes. arXiv 2024, arXiv:2408.03539. [Google Scholar]
- Han, D.; Mulyana, B.; Stankovic, V.; Cheng, S. A Survey on Deep Reinforcement Learning Algorithms for Robotic Manipulation. Sensors 2023, 23, 3762. [Google Scholar] [CrossRef]
- Levine, S. Exploring Deep and Recurrent Architectures for Optimal Control; Stanford University: Stanford, CA, USA, 2013; Available online: https://people.eecs.berkeley.edu/~svlevine/papers/dlctrl.pdf (accessed on 25 September 2024).
- Wei, J.; Zhu, B. Model Predictive Control for Trajectory-Tracking and Formation of Wheeled Mobile Robots. Neural Comput. Appl. 2022, 34, 16351–16365. [Google Scholar] [CrossRef]
- Silaa, M.Y.; Barambones, O.; Bencherif, A. Robust Adaptive Sliding Mode Control Using Stochastic Gradient Descent for Robot Arm Manipulator Trajectory Tracking. Electronics 2024, 13, 3903. [Google Scholar] [CrossRef]
- Schwenzer, M.; Ay, M.; Bergs, T.; Abel, D. Review on Model Predictive Control: An Engineering Perspective. Int. J. Adv. Manuf. Technol. 2021, 117, 1327–1349. [Google Scholar] [CrossRef]
- Almassri, A.M.M.; Shirasawa, N.; Purev, A.; Uehara, K.; Oshiumi, W.; Mishima, S.; Wagatsuma, H. Artificial Neural Network Approach to Guarantee the Positioning Accuracy of Moving Robots by Using the Integration of IMU/UWB with Motion Capture System Data Fusion. Sensors 2022, 22, 5737. [Google Scholar] [CrossRef] [PubMed]
- Ma, X.; Xu, M.; Li, Q.; Li, Y.; Zhou, A.; Wang, S. 5G Edge Computing: Technologies, Applications and Future Visions; Springer Nature: Berlin/Heidelberg, Germany, 2024; Available online: https://books.google.mk/books?id=zGgFEQAAQBAJ&printsec=frontcover&source=gbs_ge_summary_r&cad=0#v=onepage&q&f=false (accessed on 8 October 2024).
- Attaran, M. The Impact of 5G on the Evolution of Intelligent Automation and Industry Digitization. J. Ambient. Intell. Humaniz. Comput. 2023, 14, 5977–5993. [Google Scholar] [CrossRef] [PubMed]
- Biswas, A.; Wang, H.-C. Autonomous Vehicles Enabled by the Integration of IoT, Edge Intelligence, 5G, and Blockchain. Sensors 2023, 23, 1963. [Google Scholar] [CrossRef]
- Carvalho, G.; Cabral, B.; Pereira, V.; Bernardino, J. Edge Computing: Current Trends, Research Challenges and Future Directions. Computing 2021, 103, 993–1023. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cart Motion with Trapezoidal Velocity Profile | |
|---|---|
| distance (m) | 4 |
| time (s) | 3.5 |
| max acceleration (m/s2) | 6.5 |
| max speed (m/s) | 1.13 |
| Circular Motion | |
|---|---|
| radius/amplitude (m) | 1 |
| time (s) | 3.5 |
| max acceleration (m/s2) | 6.445 |
| max speed (m/s) | 1.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Knights, V.A.; Petrovska, O.; Kljusurić, J.G. Nonlinear Dynamics and Machine Learning for Robotic Control Systems in IoT Applications. Future Internet 2024, 16, 435. https://doi.org/10.3390/fi16120435
Knights VA, Petrovska O, Kljusurić JG. Nonlinear Dynamics and Machine Learning for Robotic Control Systems in IoT Applications. Future Internet. 2024; 16(12):435. https://doi.org/10.3390/fi16120435
Chicago/Turabian StyleKnights, Vesna Antoska, Olivera Petrovska, and Jasenka Gajdoš Kljusurić. 2024. "Nonlinear Dynamics and Machine Learning for Robotic Control Systems in IoT Applications" Future Internet 16, no. 12: 435. https://doi.org/10.3390/fi16120435
APA StyleKnights, V. A., Petrovska, O., & Kljusurić, J. G. (2024). Nonlinear Dynamics and Machine Learning for Robotic Control Systems in IoT Applications. Future Internet, 16(12), 435. https://doi.org/10.3390/fi16120435