1. Introduction
Unmanned Aerial Systems (UAS), commonly known as drones, are being employed in more and more civilian settings, from crowd-monitoring activities, to road traffic control, to agricultural crop monitoring. The number of civil applications where UAS can be both effectively and efficiently used has increased in recent years, thanks to a considerable reduction in costs. UAS can be remotely piloted (RPAS—Remotely Piloted Aircraft System) or they can automatically fly. As a single powerful UAS equipped with a large array of different sensors is limited to a single point of view, in recent years, the multi-UAS paradigm seems to be a more suitable approach for many applications requiring the observation of wider areas. One of the emerging areas of the civilian use of UAS is public safety and services [
1].
Moreover, the multi-UAS paradigm can guarantee:
Multiple simultaneous interventions: a UAS fleet can simultaneously collect data from multiple locations
Greater efficiency: a UAS fleet can split up to efficiently cover a large area, optimizing available resources
Complementarity: a UAS fleet can perform different tasks with growing accuracy
Reliability: a UAS fleet assures fault-tolerant missions by providing redundancy and capability of reconfiguration in the case of a failure of a vehicle
Safety: for a permit to fly, a fleet of mini-UAS is safer than a single big and heavy UAV
Cost efficiency: a single vehicle to execute some tasks could be an expensive solution when comparing to several low-cost vehicles.
Safety is a very important aspect and in recent years the number of accidents in which drones are involved is high [
2]. Studies reveal that a major cause is ground operators’ error, due to poorly designed user interfaces [
3,
4].
Therefore, applications have emerged which require the use of a fleet of drones and a related human-machine interface to ensure better Situation Awareness (SA) by the operator.
In fact, the lack of situation awareness (SA) is also often cited as a major cause of accidents [
5] and therefore understanding SA and improving it with adequate system design is an important research target [
6]. As a result, much work has been published on the subject.
In a previous paper, we set out a vision on how to design a human machine interface for a GCS (Ground Control Station) of a fleet of drones performing a mission of persistent surveillance [
7]. The design challenge for the fleet management interface was to capitalize all the available heterogeneous amount of data coming from drones and to set up a mechanism to allow efficient and safe interaction between the ground operator and the fleet, thanks to an enhanced SA. We focused on the design of a user interface which would allow a single remote ground operator to control a fleet of multiple drones. In the resulting prototype, scientific data coming from drones’ payload are timely transformed into useful information on the interface in a way that supports an operator’s SA, reducing the risk of being overwhelmed by information which may hinder his/her decision-making capability. The prototype can manage and show relevant data about the status of the drones such as battery life, altitude, coordinates, id, distance from the next target. All for the sake of safety and mission success.
In the present paper we consider another realistic situation, which may occur when a fleet of drones is remotely operated from a ground control room in a collaborative setting, i.e., by a team of multiple operators. Control rooms for mission critical operations and monitoring networks have changed considerably over the years, relying today on smart technology able to better support human–machine allocation tasks and decision support activities as well as collaborative tasks. In particular, we adopted a MultiTouch wall display to design a human–machine interface for a GCS (Ground Control Station) of a fleet of drones, conceived to allow collaboration among multiple operators. The working conditions of the control room operators are characterized by high cognitive workload in terms of user’s attention and decision processes both in daily routine and extraordinary/unexpected circumstances. Therefore, the concept of situation awareness acquires a collective meaning, shifting the focus from the SA of the individual operator to that of the entire team of decision makers, resulting in a multidimensional feature that researchers call Team Situation Awareness (TSA) [
8,
9,
10]. Maximizing TSA has been our major interface design challenge. The study we present is meant to test the hypothesis that shared displays may improve team performance [
11,
12]. To do this, in the experiment the displays are manipulated within a simulation of a mission, and the performance assessed in routine operating conditions and in the event of unexpected events.
The results show that the shared displays do not universally improve team performance, but they help maintain performance in off-nominal situations. Hence, it can be assumed that in those situations the operators will deliver better performance, relying on a higher level of situation awareness.
The paper is organized as follows.
Section 2 illustrates some related work on the Ground Control Station interfaces, on the team situation awareness and the shared displays and team performances.
Section 3 illustrates the system requirements that may impact the interface design choices, the description of the GCS interface prototype, and the system architecture.
Section 4 discusses the study carried out to evaluate the team performance and situation awareness of the use of the prototype on a shared screen, and the related results.
Section 5 concludes the document.
2. State of the Art
2.1. Ground Control Station Interfaces
A survey was carried out on the current state of the GCS user interface for remote control of drones. There are tools supporting the user to set up the system, procedures to ensure correct configuration and correct operation of the related software, the procedure for planning the mission (design of the route that the drone should perform), tools allowing users to monitor flight in real-time and tools to analyze and debug flight mission data [
13].
Some GCS interfaces already communicate to user’s crucial information concerning the operation of drones: incompatibility alerts, usage instructions or safety checks, that prevent the user from basic errors. Some apps already provide learning/support material. Most of them appear in mobile apps targeting basic drone users. However, such apps were conceived for use in missions only, focusing on video recording or mapping [
14]. In addition to displaying graphs, some apps have rerun mission features that are very interesting for visually representing the data collected during flights [
15]. However, they often result in hard-to-use user interfaces for mission planning activities as well as for alerting and recovery actions and for drone flight data analysis. Moreover, most of those interfaces do not support fleet mission management and hence do not properly address issues related to situation awareness and safety.
Our case study, for detecting an area and transmitting relevant information to the ground control station, builds upon a more complex system especially conceived to support remote control of multiple drones operating synergistically. In addition, the system was designed for use on a MultiTouch wall where multiple users can interact with it simultaneously. Currently, in literature, it is not possible to find this type of system.
For such a system the design of a usable interface raises even more challenges and becomes paramount for the proper management of a fleet mission.
2.2. Team Situation Awareness
Situation Awareness is an individual’s awareness in a situation—one person’s understanding of “what is going on” in that exact situation. The SA is different from person to person even if people have the same information available and the same working conditions. This is because cognitive factors such as experience, mental models, schemata, and qualifications differ between individuals.
A team can be characterized as a group of people with a shared goal. Working in a team may give several advantages over single operators, such as sharing the workload between operators, contributing with expertise on subtasks and there may be an advantage in safety considering that the operators can check each other’s work.
Several papers have been published with good theoretical accounts of situation awareness in teams [
8,
9,
10,
16]. In particular, Endsley defines situation awareness as “the perception of the elements in the environment within a volume of time and space, the comprehension of their meaning and the projection of their status in the near future.” She defines TSA as “the degree to which every team member possesses the SA required for his or her responsibility,” distinguishing this from SA which is shared [
8]. Salas et al. [
9] and Stout et al. [
10] place a greater emphasis on the shared understanding of a situation in TSA and also consider the issue of how team process influences situation assessment as an intrinsic component of TSA. The application of the concept of our study combines elements of the two approaches. It is close to the one by Endsley in that shared understandings are not emphasized, however, the role of team communication in developing TSA is explicitly considered, in line with Salas et al. [
9]. In short, this experiment draws on both theories and does not seek to discriminate between them. As a result, the findings are readily interpretable within either approach.
2.3. Shared Displays and Team Performance
Endsley suggests that SA directly affects performance, particularly poor SA leads to poor performance [
8]. This idea is implicitly and explicitly supported throughout the literature and applies to both teams and people. For example, Cooke et al. found a positive correlation between TSA and team performance [
17]. Endsley also proposes that the interface design (especially the displays) will influence the SA by determining the amount and accuracy of the information that can be acquired. Fewer articles focus on the impact of displays on SA, while the majority comment more on training [
9,
10]. However, there have been some. Of these, there are three empirical studies linking display sharing to team performance through the influence of TSA. Unfortunately, the conclusions of such experiments are ambiguous both for the pattern of results and for the disorders within the experimental design. These studies will be briefly reviewed to place this study in the context of existing work and to demonstrate the need for further experimentation to clarify the relationship between shared displays and team performance.
Sebok used high-fidelity nuclear power plant simulations to compare teams of nuclear power plant operators using conventional or advanced interfaces [
16]. Advanced interfaces were designed to improve TSA (along with other factors) and it was found that performance improved when they were used compared to conventional interfaces. However, it is not possible to say which feature of the interfaces caused this improvement. The advanced interfaces provided integrated information and a common overview of the system (shared display), while conventional interfaces did not. Therefore, they confused the advantages of an ecological display [
18] with the presentation of all the information to all team members. The latter manipulation was intended to increase TSA, but due to the confusion, it is unclear whether it was actually influential. Measures of improvements in TSA with the advanced interface interacted with the size of the crew, further confusing the interpretation of the results. The study also looked at the effect of various defects that occur in the plant. They showed that the failures caused a temporary decrease in TSA, but did not investigate the reverse, i.e., does TSA improve fault response? Still in [
16], the author highlights the relevance for survey drone fleet management applications on shared displays as a means of improving TSA and demonstrates the importance of comparing routine performance with that in case of off-nominal situations. Therefore, both these factors have been manipulated in the experiment we present in this paper, and simulations have been designed accordingly.
Shared displays and TSA were explicitly examined in [
11] using a task that required two-person teams to defend a departure base from arriving planes. One team member was responsible for classifying the aircraft (e.g., friend or foe) and the other was responsible for appropriate action (e.g., destroying them). The TSA was manipulated by allowing both team members to see each other’s displays (good TSA) or by allowing them to see only their own displays (poor TSA). Unfortunately, the results of this manipulation were unclear. Performance only deteriorated in the conditions of the non-shared display when it was completed before the shared condition without any training on the role of the other team members. In all other counterbalanced presentation performance orders, it was equivalent. This model of results suggests that the difference in performance arose from a lack of understanding of the task because so little information was presented about it (there was no practical evidence) rather than the manipulation of the TSA. Therefore, no definitive conclusions can be drawn from this study about the effects of TSA on team performance. Further work should include training to ensure that the results are due to the displays themselves, not the lack of training. The same group of researchers later conducted another experiment with an improved design in which all teams were trained on each other’s roles [
12]. They used shared and non-shared displays again and abstract displays that showed only the most relevant parts of the display for the other team members. In addition, they manipulated the workload. With low workloads, there was no difference in performance between conditions, but with higher workloads, teams with non-shared and abstract displays performed better than those with shared displays. This is surprising, especially the performance of teams with non-shared displays, as it suggests that TSA is inversely related to performance, which is contrary to all predictions in the existing literature. From this model of results, it is not clear how displays affect performance in this task.
Further work is needed to clarify the outcome of this experiment.
Overall, the described experiments demonstrate the relevance of display sharing for TSA and team performance, but do not offer convincing evidence of the impact of shared displays and TSA on team performance.
Our study was meant to further investigate this relationship by comparing shared and non-shared displays and routine and off-nominal situations. An experimental design will be used that offers greater experimental control and will therefore allow for more solid conclusions to be drawn.
3. The Ground Control Station Prototype
3.1. Interface Requirement
Designing the interaction between an operator and a multi-UAS system means setting the communication mechanisms between the human and each drone in the swarm, understanding their specificities and making the human–system relationship effective, efficient and satisfactory for the operator, in addition to being mission-oriented and safe.
It is, therefore, necessary to consider the mental processes that are activated in the operator during a remote mission control and to understand which dimensional, configurative, cognitive, and functional features the user interface should guarantee to be consistent with its user’s expected behavior.
Considering the case when the user must manage multiple events, within a limited time lapse, it is paramount that the interface keeps the operator’s workload below a given threshold while maintaining a high level of Situational Awareness. The design of the interface was already presented in [
7], this paper intends to set out a vision on how to design a human–machine interface for a GCS (Ground Control Station) of a fleet of drones performing a cooperative mission of persistent surveillance.
The following is a list of requirements which may have a direct impact on the interface design choices:
The GCS should allow for the inclusion or removal of a UAS to/from the mission, for efficient management of the whole swarm. In [
19,
20], the authors showed that a single operator could manage a maximum of five drones, the operator’s workload being the limiting factor as regards the maximum number of UAS to be managed by the GCS.
The GCS should notify any event which may occur during the mission, such as a low battery charge or a problem with video transmission from a video camera. The interface should provide suitable visual clues as a response to those events. For example, a visual/sound alarm could be activated when the battery reaches a critical level.
The GCS should provide timely information on the status of each UAS in the swarm. The information on the interface must be carefully selected to avoid the operator’s overload and draw his/her attention on relevant events. The standard GCS can be used for a maximum number of five drones, and it is recommended to have a list of drones in a control panel from which the operator can view the parameters associated with specific drones.
A certain level of autonomy should be implemented in the system so that the operator can rely on (semi-)automatic procedures meant to take control over an aircraft featuring an off-nominal behavior and terminate its participation in the mission as soon as possible. Establishing the right balance between decision-making autonomy and human intervention in re-planning or homing actions may have serious effects on mission success.
3.2. The Ground Control Station Interface
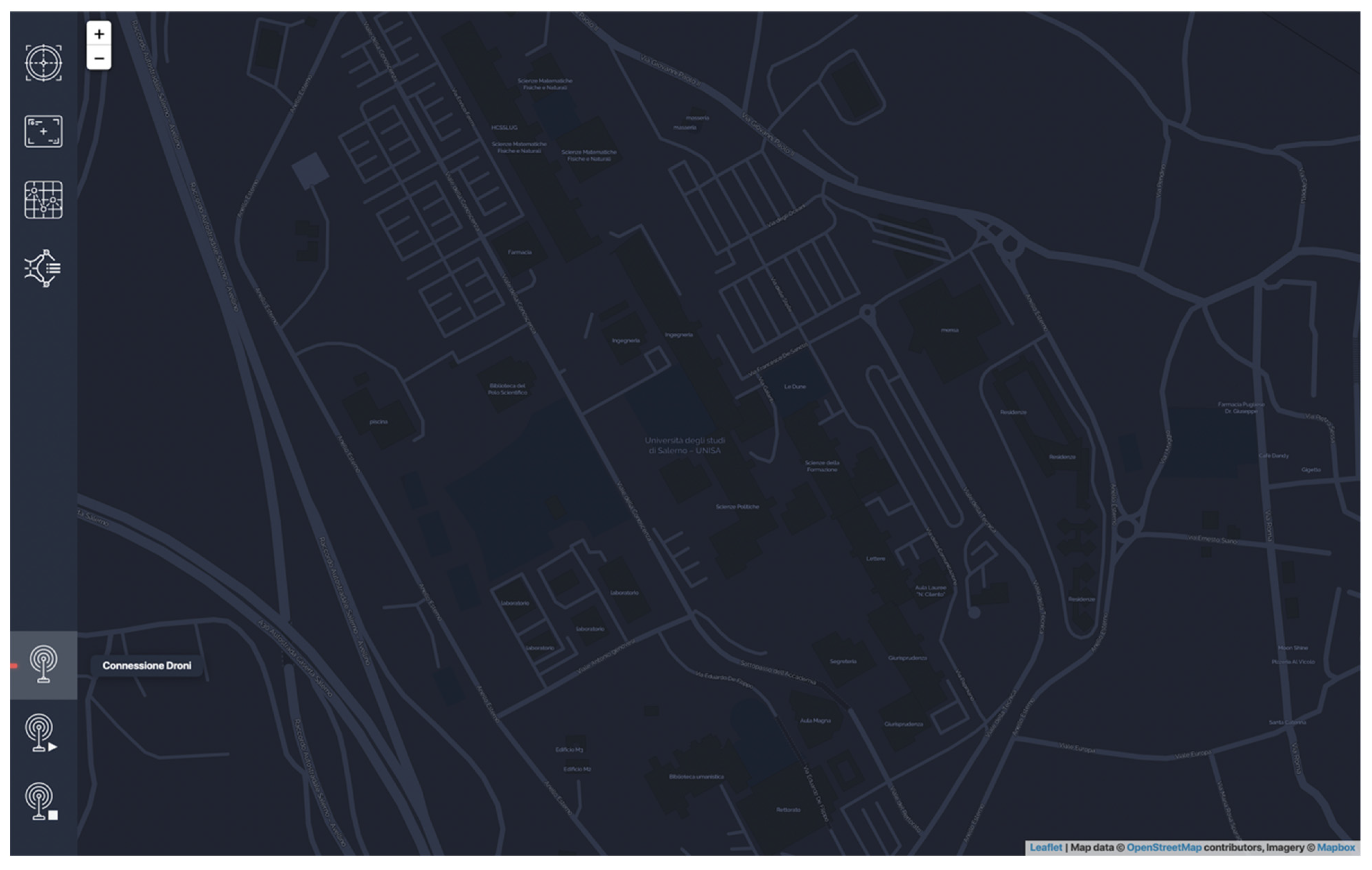
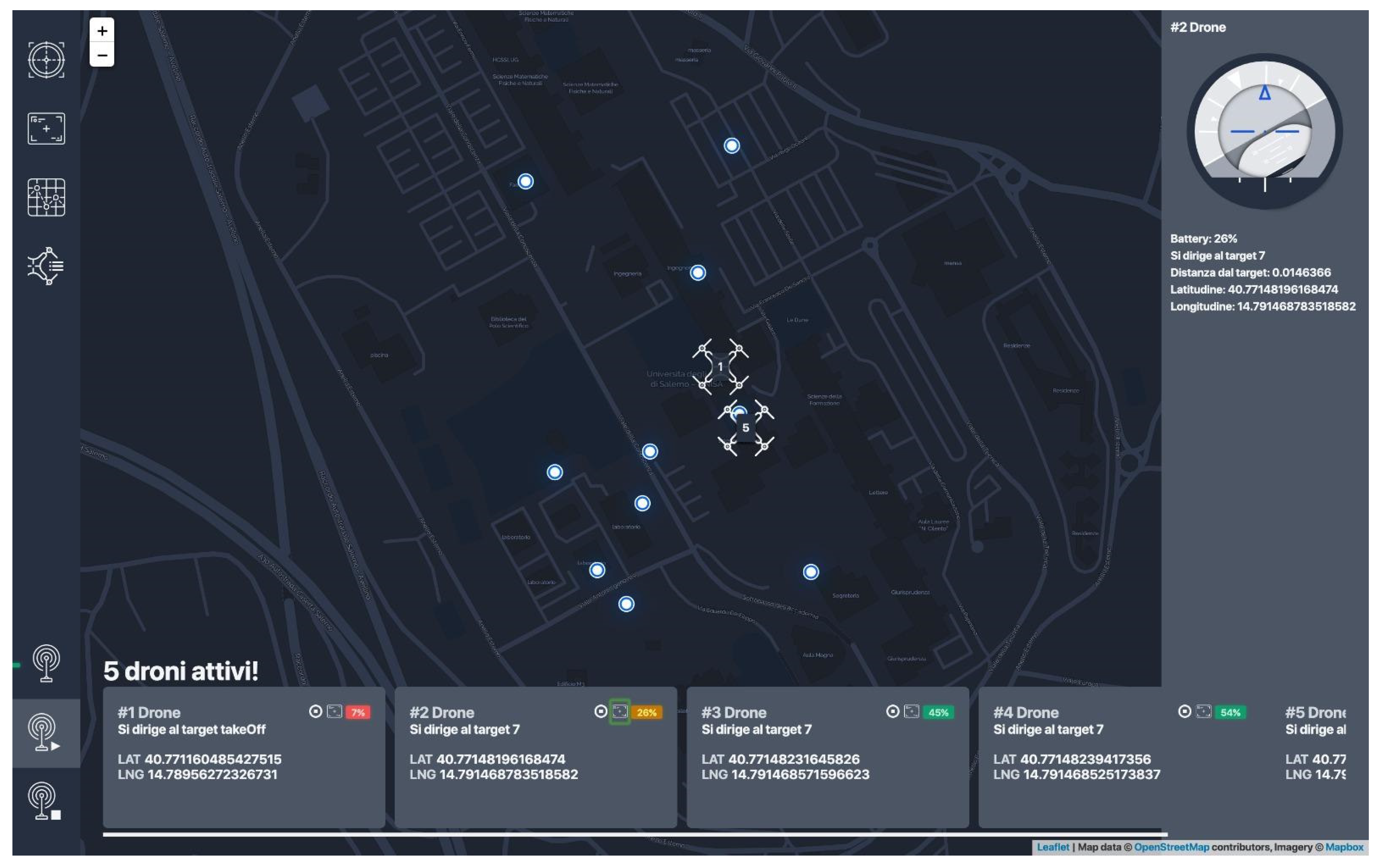
In this sub-section, we explain how we took into account the previous requirements to design the remote-control interface of the persistent surveillance system. Analyzing the user interface in
Figure 1, we immediately distinguish two areas: on the left we have a sidebar that allows the operator to interact with the application; at the top there are buttons to create or set the mission, information on the targets, and acquisition of the mission log; while at the bottom we see the possibility of connecting to drones with LEDs indicating the connection, to start and end the mission; most of the screen is intended for the map.
Once the connection is made, the LED highlights the new connection status on the map, the targets are added to the mission and the drones at their starting point are indicated. In addition, at the bottom for each drone a card is created with the data related to the drone:
− drone identification,
− indication of next target,
− coordinates of the drone,
− battery status,
− buttons to send the drone back to the take-off,
− button to view the artificial horizon related to the drone.
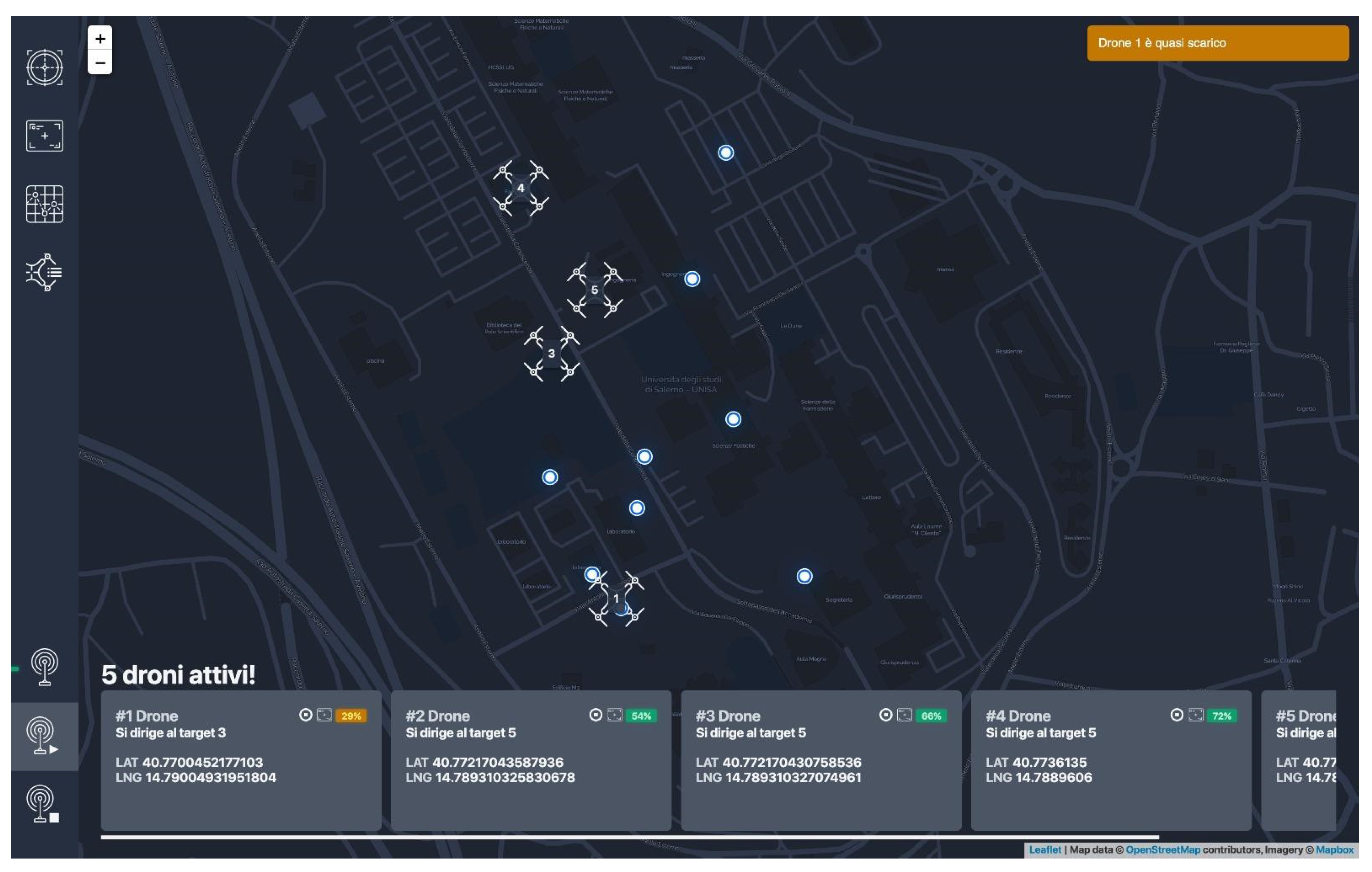
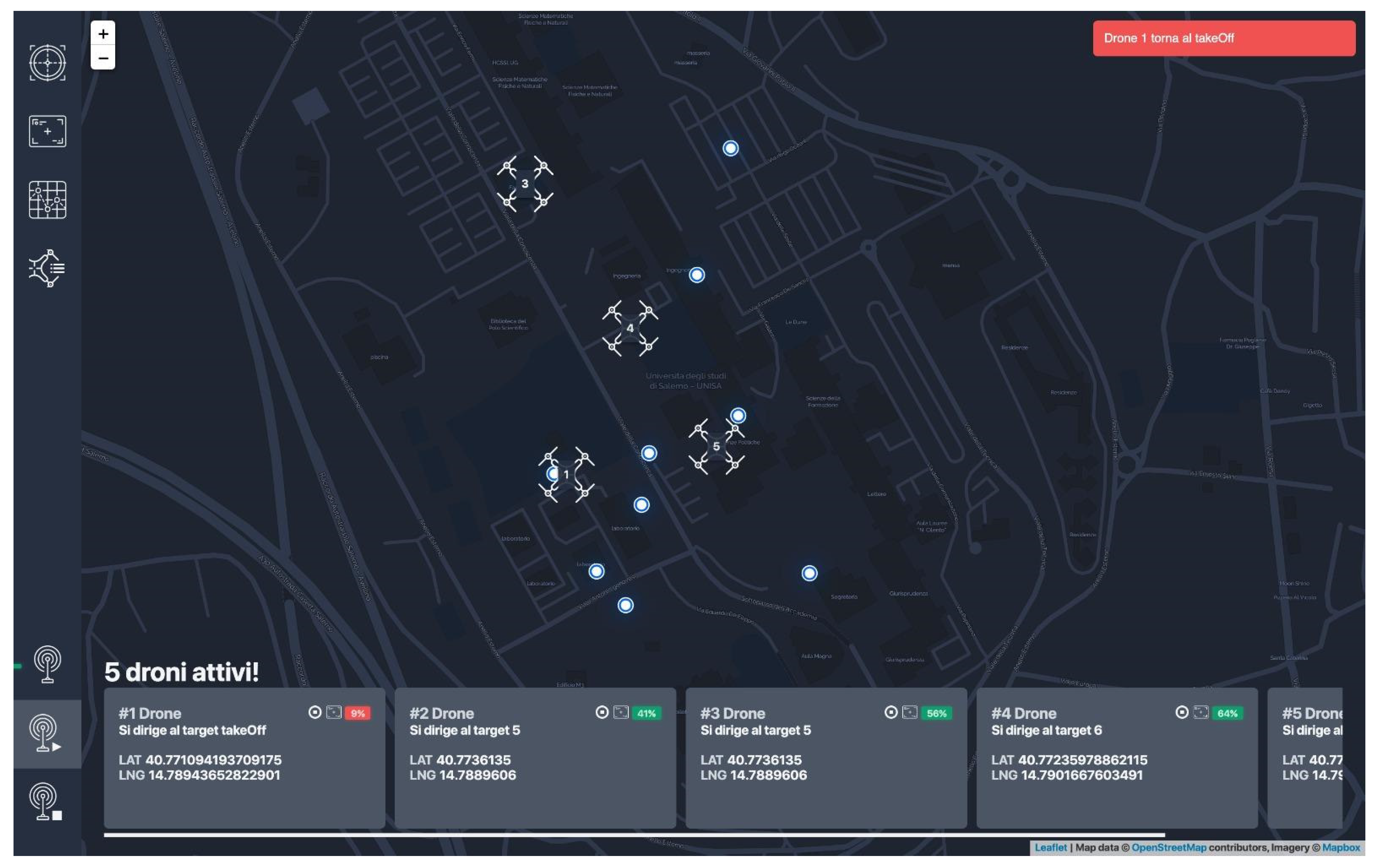
Once given the start mission command, one will see the drones move towards the second target the algorithm set. In the event the drone’s battery status is 30%, a notification is displayed in the upper right corner (
Figure 2). If it is 10%, the drone returns to the take-off automatically and a notification is shown in the upper right corner (
Figure 3). Finally, when the battery is near 0% the drone lands automatically and the interface shows the landing position.
In
Figure 4 we see how the interface provides the operator with the view of the artificial horizon associated with any aircraft selected in the swarm, to facilitate the display of all the information at the same time, if this component is opened in the same position, all other information regarding the drone is displayed.
3.3. Ground Control Station Architecture
For the development of the project, we opted for the use of NodeJS technology, this allowed us to work in an innovative environment and take advantage of the flexibility that this technology exhibits. Indeed, a web app was created with all the pro deriving from it: we can in fact use it from any operating system through a browser but what interests us even more is the capability to use it on different devices; more specifically it has been designed for use on normal desktop or MultiTouch wall systems.
The application is real-time: it receives updates on drones’ status data in real-time and updates the interface to allow the operator to react immediately to changes. We decided to adopt a three-tier architecture:
The first level consists of the data source; in the experiments, a JSON-coded scenario was used which contains all the initial information on the mission and how the system should behave but in real cases, the data source will be the drones that communicate through MavLink protocol;
The second level consists of the controllers; we need a controller that receives events from the drones and updates the interface and a controller that instead receives events from the operators and communicates them to the level below to send direct commands to the drone;
The third level takes care of the graphical interface and sends the user inputs in the form of events to the associated controller.
The word “event” has often been used; this is because the NodeJS environment is asynchronous and allows event-driven programming.
For the user interface of the application, we opted for the use of HTML5, Sass (compiled in CSS3), and JavaScript.; this stack of technologies allows us to develop a working prototype in a short time (just think the limitations posed by the development of a graphical interface in java).
Another technology used for the project is Webpack: it is a module bundler that has allowed us to implement a workflow such as: speeding up development, ensuring simple and intelligent code organization, and optimizing the size of the app in production.
4. The Study
The study presents uses of the interface to simulate a scenario in which detection of an area takes place by five drones and a transmission of relevant information to the ground control station where a team of operators is present. The aim of this study is to assess the effects of TSA on team performance.
A team member controls the drones on the map. The second team member checks the drone’s battery level.
If the drone is discharged below 30%, it is indicated on the display with a notification on the map “Drone almost discharged”. If the drone has a 10% battery status the drone is immediately homing. This is indicated on the display with a “Drone return to takeOff” notification.
This task is interdependent as the higher the drone battery rate, the higher the success rate of the mission.
The drone batteries are limited and require management during the mission.
Two independent variables were considered, referring to display sharing and event occurrence, respectively. In the “Shared” condition, the teams had the screen shared on the MultiTouch wall so that both team members could see the interface which represented the factors that vary in the simulation for their specific task. In the “Non-shared” condition, the teams had screens that were not shared and had to see all the factors of the simulation, without distinction of task.
In the “No event” condition, the mission occurred normally. An unexpected event occurred on the mission in the “Event” condition. In the simulation scenarios that signaled an unexpected event, this is the drone battery without load.
During this activity, the communication of the team members was also evaluated. Salas et al. (1995) proposed that group processes are related to TSA. For example, team members can exchange information to develop TSA. To test this idea, team communication was analyzed. Specifically, the frequency with which team members asked questions about the status of the mission was measured. The questions were speculated to provide a good indication of the extent to which team members tried to improve their SA through communication with the team.
The following hypotheses were derived. In any case, the performance was measured by the success of the mission and of the frequency of communication. Endsley (1995) predicts that poor AS will lead to poor performance, and Cooke et al. (2001) provides an empirical demonstration of this. A shared view is expected to enhance TSA by providing all team members with direct access to the complete plant status. Therefore, it is expected that:
Hypothesis 1: Operator’s performance are higher in the “Shared” condition than in the “Non-shared” one:
Hypothesis 1.1: In normal conditions, the performance is higher in the shared setting compared to the non-shared setting.
Since, Sebok observes that SA is reduced when unexpected events occur (see [
16]), we are interested in exploring which setting can better deal with it.
Hypothesis 1.2: In case of unexpected events, the performance deteriorates more in the non-shared setting compared to the shared setting.
4.1. Method
4.1.1. Participants
A total of 40 students from the University of Salerno were recruited to participate in this experiment. There were 25 male and 15 female participants. Their average age was 23.7 years. They were all volunteers and were UAS drivers at amateur level.
4.1.2. Design
A between-subject design experiment was performed. We considered two independent variables that are respectively: the display setting, which can be “Shared” or “Non-Shared”, and the presence of unexpected events, “No Event” and “Event”.
The dependent variables express the operator’s performance. They are the situation awareness (SA), the communication among the team members (CT) and the number of drones back home (DBH).
SA is measured through the situation awareness global assessment technique (SAGAT).
SAGAT is a tool that measures situation awareness in terms of three levels: perception, comprehension, and projection. For each level of situation awareness, SAGAT poses a number of questions whereby only one of the possible answers is correct.
SAGAT scores provide a detailed collection of information that can directly be compared to reality. Hence, SAGAT is a more objective method that is not dependent on a subjective evaluation because there is one right answer that is defined from the outset.
The SAGAT questionnaire is filled out while the simulation is at rest. In this way, participants can only report what they really perceived and remembered from the last seen situation. The questions refer to objects or events from the just presented situation [
19].
The communication among the team members was assessed during the activity as it is also related to TSA [
9]. The team members can exchange information to develop TSA. To test this idea, the team’s communication was analyzed in [
9]. In particular, the frequency with which team members asked questions (NQ) about the status of the mission was measured. The authors observed that the questions provided a good indication of the extent to which team members tried to improve their SA through communication with the team.
During the mission, the lack of situational awareness can cause the drones to be lost. Then, the number of drones returning home (DBH) is an additional parameter that measures the operator’s performance.
4.1.3. Tasks
The task scenario and experiment setting were designed collaborating with the Italian Aerospace Research Center experts; the operators and the system share responsibility following the liability allocation [
21]. In this case the system informs operators about the drone status while the operator is in charge to decide when the drone must land or go back home, except for the minimum battery level in which the system controls the drone landing automatically.
Figure 5 shows two users experimenting with the “Shared” setting.
The goal of the tasks is to correctly monitor the situation during drones’ exploration mission. Two operators sit in front of the system in the “Shared” or “Non-shared” setting. A team member controls the drones on the map. The second team member checks the drone’s battery level.
If the drone is discharged below 30%, a message is displayed on the map. If the drone has a 10% battery status the drone immediately tries to go back home.
The task is run twice: once in a normal situation and once with the unexpected event of the battery. The starting task is selected randomly.
During the task an unexpected event is triggered. A drone’s battery suddenly gets down to 30% causing troubles to the team.
4.1.4. Procedure
Before completing the experimental tests, the operation of the simulated mission was explained to each participant. Participants completed a practical test during which they could ask questions about the experiment and the system to make sure they fully understood it. They were then divided into two groups. The teams were then randomly assigned to “Shared” or “Non-shared” conditions. Within the shared view group, they were randomly assigned to the specific control role. The participants were not advised that this could happen. In a simulation, a drone was discharged, causing a low battery event (>30%). In the second error test, the battery indicator signaled a low battery event less than 30% but larger than 10%.
The order of these simulations was counterbalanced between the teams. Each simulation lasted 4 min. During this period all their communications were recorded for subsequent analysis. After 2 min a facilitator asked the participants the questions coming from the SAGAT questionnaire. The questionnaire consists of three items. Each of the three items belongs to one of the three levels of SA: perception, understanding and projection. Participants were free to respond openly. The right answers were defined from the start and were rated as correct or incorrect based on industry expert suggestions. Since each participant received two questionnaires made of three questions, respectively, in the two settings of the experiment, it was possible to obtain a maximum score of 6 correct answers in total. A summary of the questions is provided in the
Table 1.
4.2. Results
Since in our scenario the performance consists of SA, CT and DBH, we formulate the following sub-hypotheses:
Sub-Hypothesis 1.1.1: In normal conditions, SA is higher in the shared setting compared to the non-shared setting.
Sub-Hypothesis 1.2.1: In case of unexpected events, SA deteriorates more in the non-shared setting compared to the shared setting.
Sub-Hypothesis 1.1.2: In normal conditions, DBH is larger in the shared setting compared to the non-shared setting.
Sub-Hypothesis 1.2.2: In case of unexpected events, DBH deteriorates more in the non-shared setting compared to the shared setting.
Sub-Hypothesis 1.1.3: In normal conditions, NQ is smaller in the shared setting compared to the non-shared setting.
Sub-Hypothesis 1.2.3: In case of unexpected events, NQ increases more in the non-shared setting compared to the shared setting.
As for SA, users answered three questions while performing the two tasks. The number of correct answers are reported in
Table 2 next to the relative
p-value calculated by performing a non-parametric Chi-squared 2-by-2 test. This is to statistically analyze the frequency of correct and incorrect answers for each group. The test shows that there are no significant differences between the correct response frequencies among the two groups, except for Q3 which is related to the operators’ prediction factor. Therefore SH1.1.1 is rejected and we can state that there is no significant difference in situational awareness between the two settings when there are no unexpected events. On the other hand, SH1.1.2 is supported by data, so we can affirm that when an unexpected event occurs, the predictive ability of the operators deteriorates, particularly in the “Non-shared” setting.
Table 2.
Number of correct answers per question as measured with SAGAT for each setting.
Table 2.
Number of correct answers per question as measured with SAGAT for each setting.
| | Correct Answers in Shared Setting Group | Correct Answers in Non-Shared Setting Group | p-Value |
|---|
| No Event task | |
| Q1 | 20 | 20 | / |
| Q2 | 18 | 16 | 0.376 |
| Q3 | 17 | 13 | 0.144 |
| Event task | |
| Q1 | 19 | 15 | 0.077 |
| Q2 | 18 | 14 | 0.114 |
| Q3 | 18 | 10 | 0.003 |
The Mann–Whitney parametric test analysis was performed. It is adequate to compare two datasets collected from two different groups. The analysis produced a p-value of 0.271 in the task without an unexpected event and 0.045 in the other case. This indicates that there are no particular differences in the drones returned to base in the first task, rejecting SH1.1.2, while there is statistical evidence in the second case, confirming SH1.2.2.
Finally,
Table 4 shows the number of questions about the mission status asked between the pairs of operators during each task. For each task, the means of the two groups were compared by applying a two tailed independent-samples t-test. For the “No event” task, the
p-value is 0.268, thus rejecting hypothesis SH1.1.3. For the second task the
p-value is 0.002 showing that when an unexpected event occurs, the number of questions increases in the “Non-Shared“ setting.
4.3. Discussion and Implication
The purpose of this study is to carry out predictions derived from the situation awareness of the team operating the ground control station that sharing displays between team members would improve team performance. The results show that the shared displays do not universally improve team performance, but they help to maintain performance in off-nominal situations. These results are discussed below.
There was no overall visualization effect on team performance. Shared displays were predicted to cause better TSA than non-shared displays and thus lead to better team performance by controlling what information team members could easily access. The analysis of team communication clarifies the picture. Teams with unshared displays asked many more questions about the simulation. This implies that they integrated the limited information presented to them with the information aroused by the other team member. It is entirely possible that this allowed them to develop TSAs comparable to teams in shared conditions. This explanation of the results is interesting in that it supports the conjecture of Salas et al. [
9] that states that the group process is an intrinsic part of situation assessment and development of the TSA.
Unexpected events in the simulation reduced performance, showing that they had a measurable impact on the activity. This leads to the second interesting discovery, that performance deteriorated significantly when unforeseen events occurred in the “Non-shared” setting, more than in the “Shared” setting. The frequency of mission status questions demonstrated a similar interaction, implying that the team process offset the negative impact on TSA caused by the unshared view and an unexpected event.
The implication of these results is that shared displays are particularly useful for performance in off-nominal situations. This experiment does not reveal how this effect occurs. It is possible that with shared displays there are more people who can see the status of the mission and therefore they are more likely to quickly detect an unexpected event. It may be that with a good TSA they are more able to get around the problem once it has been detected.
Although the “Shared” setting demonstrated generally more advantages in situations involving sudden events, and it does not generate difficulties to operators in normal situations, it also reveals the need to have physical spaces enough large to allow collaboration among operators. Moreover, the experiment studied only the collaboration among two operators while in the wild there is also the possibility to have several operators collaborating at the same time. Thus, more investigation is needed in this sense.
5. Conclusions
In the paper, we analyzed relevant human factor implications for remote ground control of multiple unmanned aerial systems.
During the stages of design, the prototype was subject to supervision by the ground operators involved since the initial contextual inquiry. They actively collaborated with us in the definition and specification of the interface requirements. The formative evaluation results obtained so far are considered encouraging. The sensorial isolation of the operator and the problems related to spatial disorientation of existing multi-UAS systems are likely to be solved by using a single virtual screen that provides the operator with all the information regarding the mission and all the UAS involved while allowing the horizon view of any single aircraft.
In conclusion, this study provided qualified support for the prediction that shared displays would lead to better team performance than non-shared displays.
In particular, the advantages of display sharing arise in off-nominal situations, for example when an unexpected event occurs but not during routine operation.
The study also suggests the important role of team process (communication) in maintaining TSA. However, the results indicate that the team process cannot overcome the poor TSA derived from non-shared displays in all situations. In this task, the team process only seemed to provide sufficient compensation in routine situations. As future work, we plan to investigate the problem in the context of more complex scenarios. New experiments could concern wider areas to be monitored, heterogeneous drones characterized by different performance and payload, and operators located on the territory.


 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}