1. Introduction
Ever-increasing human activities in oceans require handy, reliable and cost-effective high-speed network access not only on the water surface but also underwater. Although terrestrial Internet can be easily accessed almost any time in populated lands via various types of terminals, this is not yet the case in oceans mainly due to huge differences between terrestrial and marine environments. Oceans account for more than
of the Earth’s surface with
km
and an average depth of 3682 as well as a coastline of 356,000 km, containing about 1.3 billion cubic kilometers of saltwater. These features make it extremely difficult and costly to deploy network infrastructures therein. Although satellite Internet is accessible in most areas of the oceans, the services are not cost-effective due to high costs in construction, launching and operation of satellites [
1]. Furthermore, many underwater sensors/devices have been deployed in oceans, but it is difficult for them alone to construct an Internet of Underwater Things (IoUT) [
2]. This is because the current underwater wireless network can only cover small areas at high speed due to difficulties in underwater networking [
3,
4] caused by the physical limitations of underwater communication media, i.e., acoustic wave [
5,
6,
7] and blue/green laser [
8] (see
Section 3).
Now, how to provide cost-effective network services to users in oceans is a challenging issue under research mainly following two tracks. The first one is to improve the cost-effectiveness of satellite services [
9] not only for the users in oceans but also for the global users. Typical satellite services available today include those provided by Inmarsat and Iridium, whereas their cost-effectiveness cannot be comparable with terrestrial ones. As mentioned in [
10], data transfer cost can be 30 times more expensive with approximately
$300–2000 per month on satellite cost. Due to high radio frequencies used by satellites, their communication quality is affected by moisture and various forms of precipitation frequently present in marine environments [
9], while radio communication cannot cover underwater networks either (More discussion can be found in
Section 4.2). The second one is non-satellite solutions, such as exploiting mobile communication systems (e.g., [
11,
12]) or wireless ad hoc networks (e.g., [
13,
14,
15]) in oceans. However, too small coverage relative to the ocean surface and network reliability are two difficult issues (see
Section 4.3 and
Section 4.6).
Although there are several different proposals trying to address the above issue, they are common in the sense that each of them addresses the above issues separately and cannot provide an effective solution to the problem alone. For example, shore–ship and ship–ship communication often termed in “maritime communication and network” [
10,
16,
17,
18] do not address underwater networking issues. Actually, there are also some well-established or under developing communication systems running in oceans, such as maritime radio, underwater acoustic networks (UANs), etc., which is discussed in
Section 4. Exploiting these systems collaboratively to provide cost-effective network services to users in oceans is the basic idea of marine Internet, proposed about six years ago [
1]. In this case, the above-mentioned issue becomes how to interconnect these systems efficiently on real-time. Thus, a large-scale cooperative wireless networking structure mainly based on maritime radio and mobile communication systems as well as satellites are proposed by jointly using wireless ad hoc networks in [
19,
20].
However, marine Internet cannot be a simple extension of the terrestrial Internet due to the reasons mentioned above. It is still one of the less developed fields for networking in oceans, and more research efforts and investigations are needed to foster its development. To allow more researchers to understand marine Internet for internetworking in oceans, this tutorial systematically introduces its principle, architecture and applications with the following contributions.
The main applications of marine Internet are discussed in
Section 2, along with an introduction to its best-effort networking principle.
The environment for communication in oceans is described in
Section 3, where possible objects and facilities that might be used for communication in oceans are introduced, such as those located along coastlines, on islands, and on/under water surface as well as in air and space. Communication media and power sources probably available in oceans are also discussed.
The well-developed and under developing communication systems in oceans are introduced in
Section 4, with a comparison between them in terms of their suitability in oceans. They typically include maritime radio, mobile communication systems, satellites, high-altitude platform (HAP), wireless ad hoc networks (WANETs), cabled underwater observatory systems and UANs.
The internetworking strategies of marine Internet is discussed in
Section 5, which introduces a large scale cooperative heterogeneous wireless network structure that uses an integrated coastline network plus vessel-based WANETs as a backbone network. A network selection policy is also discussed.
Some challenging issues necessary for further studies to foster the development of marine Internet are discussed in
Section 6, including how to interconnect networks with no explicit borders, how to enable various WANETs in marine Internet to make smart networking decisions, and how to maximize the end-to-end reliability and security of marine Internet, as well as mobility management with mobile base stations and WANETs.
3. Environments for Communication in Oceans
This section describes communication environments in oceans, which refer to deployment locations, objects and resources that might be used to set up communication infrastructure and act as networking nodes, main communication media as well as power sources applicable and available in oceans.
3.1. Coastline and Island
Along coastlines or on islands, network infrastructures such as base stations and access points (BSs/APs) can be deployed. Coastline infrastructures can be linked directly by optical fiber to terrestrial Internet to extend Internet services to oceans. Similarly, infrastructures deployed on islands near coastlines can also be linked to the terrestrial Internet, and the link can be wireless or wired. In these cases, users can connect terrestrial Internet via a deployed BS/AP with their devices such as mobile phones and notebooks. Furthermore, power supply here is not a big issue since a BS/AP can be supported directly by electricity grids or generators. On remote islands, wind and solar energy stations can be also installed.
3.2. Water Surface
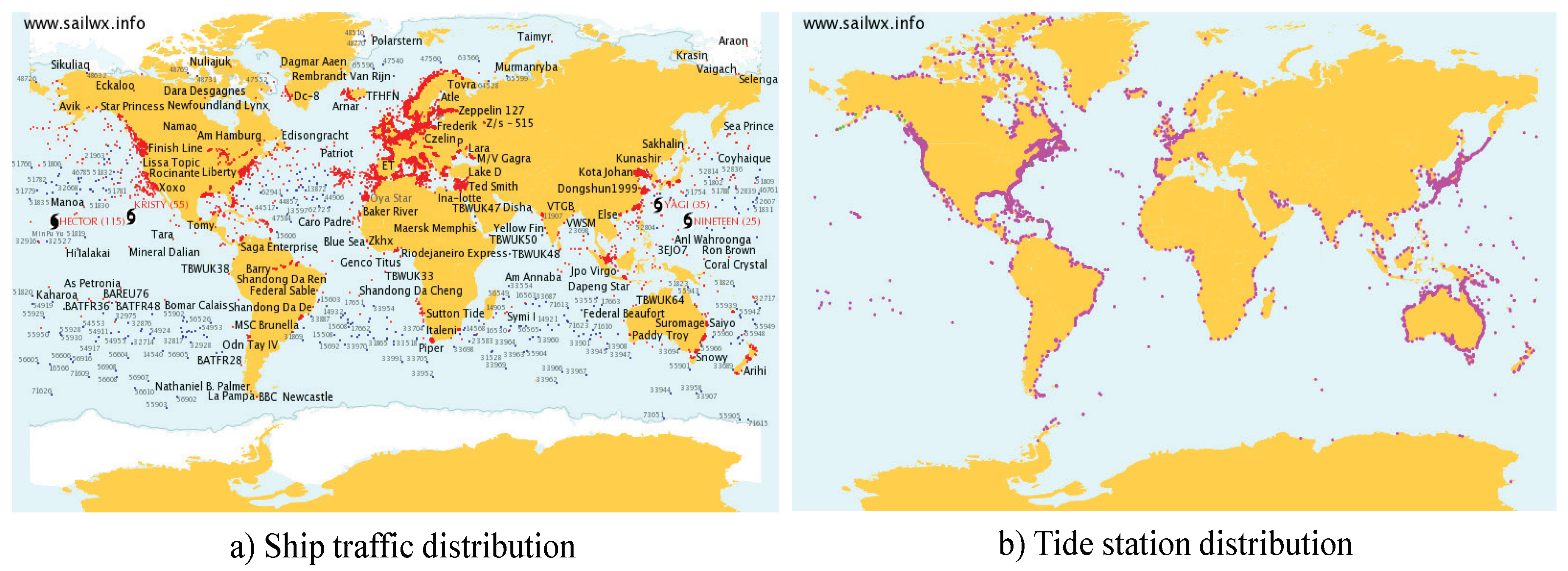
Many objects on the water surface in oceans can be used for networking, typically including vessels such as ships and boats usually equipped with powerful communication capability and sustainable power sources. As illustrated in
Figure 2a, many ships run daily in the ocean with high density near the coastline, especially in Europe. Most Internet users in oceans are carried by vessels, which often move from one place to another, resulting in dynamic and uneven user distributions. A cruise ship’s capacity ranges from hundreds to thousands with an average of 3000 passengers for ocean liners. They can use their devices to connect terrestrial Internet via the onboard BS/AP linked to those installed along coastline or satellites. For boats, their communication capacity is usually smaller due to smaller power supply as well as shorter antenna for wireless communication.
There are also various observatories such as tide stations, as illustrated in
Figure 2b, which are also equipped with communication devices and power supply such as solar or tide energy. Recently, a more powerful floating platform has been designed and deployed in the ocean [
26]. It is more stable against wind and wave on water surfaces and can host many high-rate sensors such as video cameras with communication with the terrestrial center at high-speed via satellites. A large power capacity can be realized by using more batteries to harvest solar/tide energy. In water areas near coastlines, some submerged buoys are often used to construct water paths with tide energy, and can be enhanced to provide short-range communication due to their small energy supply and short antennas for wireless communication.
3.3. Air and Space
There are many objects over the water surface that can be used for networking in oceans. The typical one is satellites, which are the only available solution to provide reliable Internet services to cover the ocean. However, its high cost makes it difficult to become popular especially among the ordinary users as discussed in
Section 4.2. At much lower attitudes, planes and helicopters can provide powerful communication occasionally to bypass users, and drones as well as balloons near the water surface may also provide limited communication services subject to their energy constraint.
In between, a quasi-stationary aerial platform called High-Altitude Platform (HAP) can be deployed in the stratosphere 17–22 km above the Earth’s surface [
27]. It can be used to provide more cost-effective communication services with a coverage radius up to 100 km, which depends on the altitude and elevation angle. More discussion can be found in
Section 4.5.
3.4. Underwater
There are several specific underwater observatory systems deployed on the seafloor using power lines for energy supply and fiber optical for communication. Such system have large communication and power capacities, and can be used to provide power recharge and data sinks (see
Section 4.4). There are also various types of underwater sensors/devices with communication capabilities, such as subsurface buoys and automatic underwater vehicles (AUVs) as well as underwater acoustic networks. They all suffer from the same problem, i.e., limited power supply of battery and drifting randomly with sea wave and current.
3.5. Communication Medium
This section introduces the main communication technologies used above the water surface and underwater in ocean environments.
3.5.1. Communication over Water Surface
Although 3G and beyond cellular networks are very popular in terrestrial environments, their applications in marine environments still need to be investigated since radio signals can be easily absorbed by seawater. As mentioned above, the density of marine Internet users is sparse while many users are crowded in small places such as cruise ships. In this case, point-to-point communication is more effective than broadcast communication. However, the line-of-sight (LOS) propagation of radio waves for point-to-point communication is affected by the curvature of the sea surface in long distances. Atmospheric duct under investigations can change such situation since the near-surface wave propagation at microwave frequencies is trapped between the ducting layer and the sea surface [
28] so that the signal can propogate beyond LOS distances, as illustrated in
Figure 3. This phenomenon, which is nearly permanent in oceans and coastal environments, is caused by a region of rapidly decreasing humidity above the ocean that makes the refractivity to drop quickly with height [
29].
The effect of the evaporation duct on microwave signal propagation depends on many factors including atmospheric conditions, polarization, antenna’s positioning and wave frequencies [
30]. An experimental link for a range of about 78 km using antennas located 7 m above the mean sea level was built in [
31], where the link operates at a frequency of 10.6 GHz and provides a data rate of 10 Mbps over 80% of time. The state-of-the art military system can enable 500–1000 km point-to-point communication in the ducting layer [
28]. Therefore, it is interesting to study communication in atmospheric ducts to provide long range point-to-point high speed maritime communication, and particularly for communication between coastlines and ships in remote water areas.
3.5.2. Underwater Communication
Table 1 lists transmission rates, distances and propagation speeds of the main media that can be used for underwater communication. It shows that electromagnetic wave cannot propagate well in seawater. Transmission rates at very low frequency (VLF) and extremely low frequency (ELF) are only about 300 bps for transmission ranges shorter than 50 m. Blue/green laser can provide much higher transmission rates, but is absorbed by seawater and susceptible to obstacles, and cannot propagate over long distances, either. Relatively, acoustic wave can propagate over long distances at kbps transmission rates (e.g., tens of kbps for 2-km transmission distances) but at much slower propagation speeds, and cannot support real-time applications over long distances [
20].
3.6. Summary
Table 2 summarizes communication conditions available in oceans, and shows that many resources can be exploited for networking. In general, networks along the coastline or on islands can provide reliable performance with stable energy sources by using wired communication systems, electricity grid and generators. Typical stable resources include the BS/AP, power tower and observatories installed along coastlines or in islands and optical fibers. However, it is very expensive to deploy this kind of infrastructure densely at sea. Relatively, it is more feasible to deploy a large number of vessels, boats, buoys and floating platforms over water surface in oceans. However, they adopt wireless communication and ad hoc networks, which cannot guarantee communication quality and network connectivity. For vessels and boats, energy consumption for communication and networking usually takes very small portion of their overall energy to be consumed. Satellites and HAPs in sky/space can provide good performance, while their transmission speeds are smaller than those of wired communication on average. It is also expensive and difficult to densely deploy them, while the major energy sources are battery and solar energy. In underwater environments, the majority of networks are based on acoustic wireless communication and battery, which limits network sizes and capacity. Costly acoustic communication devices and their deployment underwater make dense network node distribution very difficult [
4]. The availability of many resources mentioned above (e.g., wireless channel capacities, network connectivity and energy sources) is not stable, which requires the networking architecture and protocols able to adapt themselves to such dynamics.
4. Communication Systems in Oceans
The main well-developed communication systems used in oceans include maritime radio and satellite systems. Mobile cellular systems are occasionally exploited, while cabled underwater observatories are designed for special applications. Meanwhile, there are also some new technologies under research and development, typically including high-altitude platform (HAP) and wireless ad hoc networks (WANETs). These systems are briefly reviewed in the following.
4.1. Maritime Radio System
The maritime radio system is the most popular and mature communication system developed mainly for maritime transport long time ago. It works in broadcast mode to cover wide water areas at low data rates for many applications, as listed in
Table 3. For example, Navigational Telex (Navtex), part of the Global Maritime Distress and Safety System (GMDSS) defined by the International Maritime Organization (IMO), can reach 370 km off shore at 100 bit/s [
36]. The very high frequency (VHF) here operates at 156–
MHz with a total 6.025-MHz bandwidth and the channel spacing of 50 kHz and 25 kHz, respectively. Traditionally, it only supports analog voice communication up to about 111 km. It is enhanced by a digital selective calling (DSC) at a rate up to 1.2 kbps, which allows a distress signal to be sent by pressing a single button. Furthermore, high frequency (HF) at 3–30 MHz is also used for very long-distance communication at low rates (e.g., 9.6 kbps) for voice and fax with unstable quality. Some VHF channels are used to develop a VHF data link (VDL) to provide data communication for automatic identification systems (AISs) at a maximum rate of 9.6 kbps. The AIS is an automatic tracking system that identifies and locates vessels for navigation and collision avoidance. Ships equipped with an AIS meeting anywhere can identify and track each other. Consequently, the position information of a ship is continuously transmitted to ensure that its neighbors can know its position [
37].
E-navigation has been defined by IMO to further improve the safety of maritime navigation and operations. To this end, more information has to be exchanged in real-time, such as weather, ice charts, the status of aids to navigation, water level and rapid changes of port status, voyage information, passenger manifest, pre-arrival report, etc. [
39]. Due to the popularity of AISs and increasing demands of ship-to-shore and ship-to-ship data exchange, the capacity of the current VDLs becomes inadequate. To handle this problem, two additional 25-kHz channels have been suggested to support application-specific message communication, and six VHF channels have been used to design a VHF Data Enhanced System (VDES) [
39] to provide a maximum rate of 302.2 kbps. Some advanced communication technologies such as Orthogonal Frequency Division Multiplexing (OFDM) and distributed antenna are also used for VDESs. Some results of the VDES channel sounding campaign are reported in [
40]. Similarly for on-board communication for maritime operations, six ultra-high frequency (UHF) channels between 450 and 470 MHz are also used with narrower channel spacing [
41,
42].
On the other hand, the communication capacity of maritime radio systems is insufficient for many Internet applications. For example, the audio codec bandwidth ranges in
–128 kbps, and that for video is about 250–4000 kbps. Consider network protocol overheads incurred for transport, it requires an additional bandwidth of about
–
the original one for audio with only considering the IP header [
43]. All these rates go beyond the capacity of the current maritime radio systems.
4.2. Satellites
Satellites are the only solution available today that can provide Internet services with wide coverage. A geostationary Earth orbit (GEO) satellite runs in an orbit of 35,786 km with an orbit period of 24 h so that it seems to be fixed in the sky to a ground observer. Three GEO satellites can cover most of the Earth’s surface except the polar areas. Inmarsat uses GEO satellites to provide the following services: voice, IP data and access to GMDSS. The recently developed FleetBroadband can provide a shared-channel IP packet-switched service up to 492 kbps using a broadband terminal specially designed for fitting on ships, as listed in
Table 4.
A weakness of satellites is that their communication quality is susceptible to weather conditions due to the poor penetration ability of very high communication frequencies used by satellites. Particularly, the channel quality is affected by moisture and various forms of precipitation frequently present in marine environments [
9]. With low-orbit satellites, it is challenging to keep the communication quality of the wireless link between a flying satellite and moving terminals with rapid handoff. Furthermore, satellites cannot support underwater networking since radio signal cannot propagate well underwater, as shown in
Table 1.
Due to high costs for satellite’s construction, launching [
9], operation and maintenance as well as communication devices [
44], satellite Internet services are not cost-effective. Hardware upgrading and repairing of a running satellite almost means a new replacement. The system can work as expected only after all the satellites have been launched and operate successfully, which results in a long development period [
44].
Table 4 lists some satellite Internet services available for maritime transports. For example, the FleetBroadband-G of Inmarsat provides the following packages: maximum data rate of 432 kbps for data transmission with
$–
per megabyte, and
$–
per minute for voice, along with an initial equipment cost of
$4700–16,914.
Table 5 lists marine Internet services provided by the OpenPort airtime package of Iridium: per-minute cost of voice ranges
$0.62–0.95, almost tens times that of terrestrial mobile cellular voice services.
It is expected that satellite communication cost will decrease as advance of new technologies such as low-orbit small satellites [
45] and satellite launching technologies using reusable rockets with multiple satellites per rocket, by which the costs for both construction and launching of satellites can be reduced significantly. There are several new initiatives for global Internet announced recently, which are all based on massive deployment of small satellites. For example, OneWeb (720 satellites), Amazon Kuiper (3236 satellites) and SpaceX Starlink (4425 satellites). These huge projects are very costly, and still under development for mature operation. To further reduce the cost of marine Internet users, it is important to attract more terrestrial users using satellite Internet in order to improve investment efficiency, whereas the technical evolution of running satellite networks is much slower than that for terrestrial networks.
4.3. Mobile Communication Systems
Typical mobile communication systems [
46] include Global System for Mobile communications (GSM), General Packet Radio Service (GPRS), Universal Mobile Telecommunication Service (UMTS), Worldwide Interoperability for Microwave Access (WiMAX) and the Long-Term Evolution (LTE), 5G, etc. They are adopted or investigated for maritime operation and Internet access for residents and ships in harbor areas as well as busy water channels. For example, WiMAX, LTE and digital VHF are jointly used to provide broadband maritime radio communication in coastal areas [
47]. Verizon Wireless enhanced its 4G LTE coverage in and around Boothbay Harbor in Maine, USA in 2013 [
48]. Huawei set up 4G long-range mobile coverage in Long Island of Shandong in China in 2015 [
49]. Similarly, a GSM/GPRS based vessel tracking and distress beacon system is proposed to facilitate maritime search and rescue operation [
50]. WiMAX is proposed to provide maritime radio communication in the High North region, where GEO satellite signal cannot reach [
11]. The BLUECOM+ project studies how to enable broadband and cost-effective Internet access in remote ocean areas by jointly using Wireless Fidelity (WiFi), GPRS, UMTS and LTE [
12]. However, mobile systems have not been systematically deployed in oceans.
Mobile communication systems can provide much higher transmission rates than the maritime radio system at rates up to several hundred Mbps for a coverage of up to 100km-radius. For example, the eWBB LTE solution of Huawei listed in
Table 6 supports downlink and uplink data rates up to 100 Mbps and 50 Mbps, respectively [
51]. However, they require deploying terrestrial infrastructure (i.e., BSs and cables) so that it is very difficult for them to cover remote water areas in oceans. Assume BSs to be deployed only along the coastline. Given the global coastline
356,000 km and the maximum radius of per BS coverage is
km (e.g., WiMax), the overall coverage of such a system can be estimated by
km
, which is only
of the overall ocean’s surface, and
with
km (e.g., LTE).
A large amount of bandwidth has been allocated to mobile cellular systems, as listed in
Table 7 [
20], e.g., about 50 MHz bandwidth for the first generation system (1G), Advanced Mobile Phone System (AMPS), and 2G GSM, respectively. For 3G, 145 MHz bandwidth is allocated to UMTS International Mobile Telecommunications (IMT)-2000 and 100 MHz to 4G LTE-Advanced. The sum of these spectra is 385 MHz. Furthermore, the spectra 450–470 MHz and 698–862 MHz originally licensed to TV have been re-allocated to IMT in 2007. These licensed spectra are very expensive due to very high license fees. For example, in 2000, the annual license fee was up to
$16,000 per-kHz spectrum [
54], and the combined annual fees to be paid for 2G–4G rose to 80.3 million pounds for the 900-MHz band and to 119.3 million pounds for the 1800-MHz band, as reported by BBC on 24 September 2015. Thus far, they are mainly used to cover terrestrial mobile users rather than Internet users in oceans.
4.4. Cabled Underwater Observatory System
Several cabled underwater observatory systems have been deployed, typically including Monterey Accelerated Research System (MARS) in USA, Ocean Networks Canada (OCN), Dense Oceanfloor Network System for Earthquakes and Tsunamis (DONET) in Japan, and the European Multidisciplinary Seafloor and water column Observatory (EMSO).
All these systems use sea-floor cables for both data communication and electrical power supply to support long-term real-time monitoring of processes related to geosphere, biosphere, and hydrosphere interactions. They are high-technology platforms hosting sensors to monitor temperature, pH, salinity, water circulation, seabed movements, etc., and provide services to the industry and fundamental for oceanic multidisciplinary research.
As illustrated in
Figure 4, MARS uses a 52-km undersea power and optical fiber to carry electricity power and data to a science node, which is located 891 m below the surface of Monterey Bay and connected to the shore through the cable. Other nodes can attach to this main hub, while additional experiments can be daisy-chained to each node [
55]. OCN consists of two underwater observatories: the 800-km NEPTUNE and the nearly 50-km VENUS with four community observatories and seven shore stations [
56]. It provides stream live data from instruments at key sites off coastal British Columbia via the Internet to the users around the world. DONET is a submarine real-time seafloor observatory network to monitor earthquake and tsunami, using 20 sets of submarine cabled sub-sea measurement instrument deployed 15–20 km apart with five science node interfaces [
57]. EMSO is based on a European-scale network of multidisciplinary seafloor observatories, consisting of regional facilities placed at key sites from the northeast to the Atlantic, through the Mediterranean, to the Black Sea. They constantly measure different biogeochemical and physical parameters related to natural hazards, climate change and marine ecosystems [
58].
4.5. High-Altitude Platform (HAP)
A High-Altitude Platform (HAP) can provide more cost-effective communication services than satellites. As reported in [
59], a 10-km-attitude HAP can provide downlink date rates up to 320 Mbps with a 50-MHz bandwidth at 28-GHz frequency. The main advantages of HAPs over satellites include easier and faster deployment, lower cost and larger communication capacity with shorter propagation delay [
59]. Compared with a terrestrial BS, a HAP can cover much larger areas even in harsh environments.
The power supply of HAPs is a challenging issue. Power is required for propulsion and station-keeping against mild wind and turbulence in the stratosphere. A balloon-based HAP requires wind compensation to stay still in the sky. An aircraft-based HAP has to fly along a circle to maintain services in certain area [
59]. Power is also required for the payload, communication and networking. Unlike satellites that can be re-charged by solar energy frequently, for HAPs, enough power has to be stored during the day in order to maintain the operation throughout the whole night. Thus, a large capacity cell is required, resulting in more payloads and more power consumption. A possible solution is to bring a HAP back to the ground for service, which however disrupts service at increased deployment cost [
20].
HAPs are more suitable for large water areas near coastlines and can be used in the following situations [
19]:
An instant demand as a short-time complementary to existing communication facilities. When the number of users goes beyond the expected situation, a HAP can be set up shortly and removed afterwards.
A short-term solution where no other network services are available. A HAP can be in the place for a duration of months or longer, particularly useful for some events (e.g., scientific exploration in a remote water area) with a large amount of data traffic to be transferred to the BS on board or the land.
Communication network infrastructure. Such kind of HAP can be based on solar-powered unmanned airships that can stay in the stratosphere for a long period. For example, the high-altitude unmanned airplane developed by DARPA can operate continuously on-station for five years [
60], and Google Loon’s high-altitude balloons aim to create an aerial wireless network in order to provide free global Internet access [
61].
4.6. Wireless Ad Hoc Network (WANET)
All the above-mentioned systems require network infrastructures such as BSs/APs to coordinate communication between terminals that cannot communicate each other directly. A WANET does not require any pre-established network infrastructure and allows terminals to communicate with each other directly [
62]. Its ability in terms of self-organizing and self-curing along easy and fast deployment makes it particularly suitable for dynamic networking environments in oceans. Therefore, several schemes have been investigated as discussed below.
4.6.1. Nautical Ad Hoc Network (NANET)
Vessels and facilities on the water surface capable of wireless communication can be used to construct a nautical WANET (NANET) [
14,
15] to provide vessel-to-vessel and vessel-to-shore communication. For example, a WiMAX-based mesh network is used to provide onboard Internet broadband access for vessels in the Mediterranean without using satellites [
63], and to enable high rate ship-to-ship and ship-to-shore communication [
13]. In marine Internet, the network nodes of a NANET include any objects on the water surface that can be used for networking such as floating platforms and buoys besides vessels.
NANETs are practically feasible in near water areas due to high vessel densities along the coastline as illustrated in
Figure 2, by jointly using buoys and various floating platforms as mentioned in
Section 3. The performance of NANETs can be further improved by exploiting some favorable features of NANETs. For example, the availability of the information on the positions and speeds of vessels, which can be provided by AIS or GPS. This information can be used to set directional antennas and improve routing performance.
4.6.2. Aeronautic Ad Hoc Network (AANET)
As mentioned in
Section 3, occasionally there are also some aerial units flying in the sky, such as balloons, drones, helicopters and airplanes. They are usually equipped of communication devices, and can be used jointly with nodes running or floating on the water surface to provide opportunistic networking for delay-tolerant applications [
64]. When many aerial units appear in the same airspace, they can form an AANET [
65] for communication between themselves, and provide more opportunistic networking for nodes on the water surface, too. For example, a team of drones or helicopters can construct an AANET to allow them to communicate with each other, and meanwhile act as a bridge between vessels on the water surface and terrestrial BSs.
4.6.3. Underwater Ad Hoc Network (UANET)
It is costly to deploy infrastructure for constructing underwater networks so that UANETs are often adopted to avoid such construction. Typical such network are underwater acoustic (sensor) networks [
66], which can be used to connect underwater things to construct the IoUT [
2]. With acoustic underwater communication, it is necessary to minimize the use of handshake to avoid long latency due to slow signal propagation speed and transmission rates. To improve the performance of a single UANET, it is necessary to jointly optimize the design of the data link layer and network layer, especially medium access control (MAC) [
67,
68] and routing protocols [
69] as well as end-to-end reliable transfer protocols [
70]. Several surveys on underwater networking issues can be found in the literature (e.g., [
71,
72]).
4.7. Summary
Table 8 summarize the characteristics of the above-discussed networking systems in terms of network capacity, coverage size, reliability, service cost-effectiveness, infrastructure safety and feasibility for underwater coverage. Service cost-effectiveness is mainly determined by the costs of network construction and operation. Maritime radio systems are designed for maritime transport and even difficult to satisfy their own ever-increasing data communication demands due to the limited bandwidth. The service provided by satellites are not cost-effective to the ordinary users, and such situation may last until technological breakthrough is made. Although WANETs can be set up at a very low cost, their performance reliability is an issue. Thus far, mobile systems only provide occasional services without systematical deployment in marine environments. Cabled underwater observatory systems are designed for specific missions, and their infrastructures are not open to the public. For UANs, their transmission rates also fail in supporting many Internet applications for large coverage. The HAP is a promising technology for cost-effective communication in oceans, while more investigation is still needed for practical applications.
5. Internetworking Strategies of Marine Internet
The above discussion shows that none of the reviewed systems alone can provide cost-effective high-speed Internet services in large marine environments. Consider their characteristics summarized in
Table 8 and cost-effectiveness as well as reliable communication for safety and rescue requirement in oceans. A large scale cooperative heterogeneous wireless network is proposed for marine Internet [
19,
20,
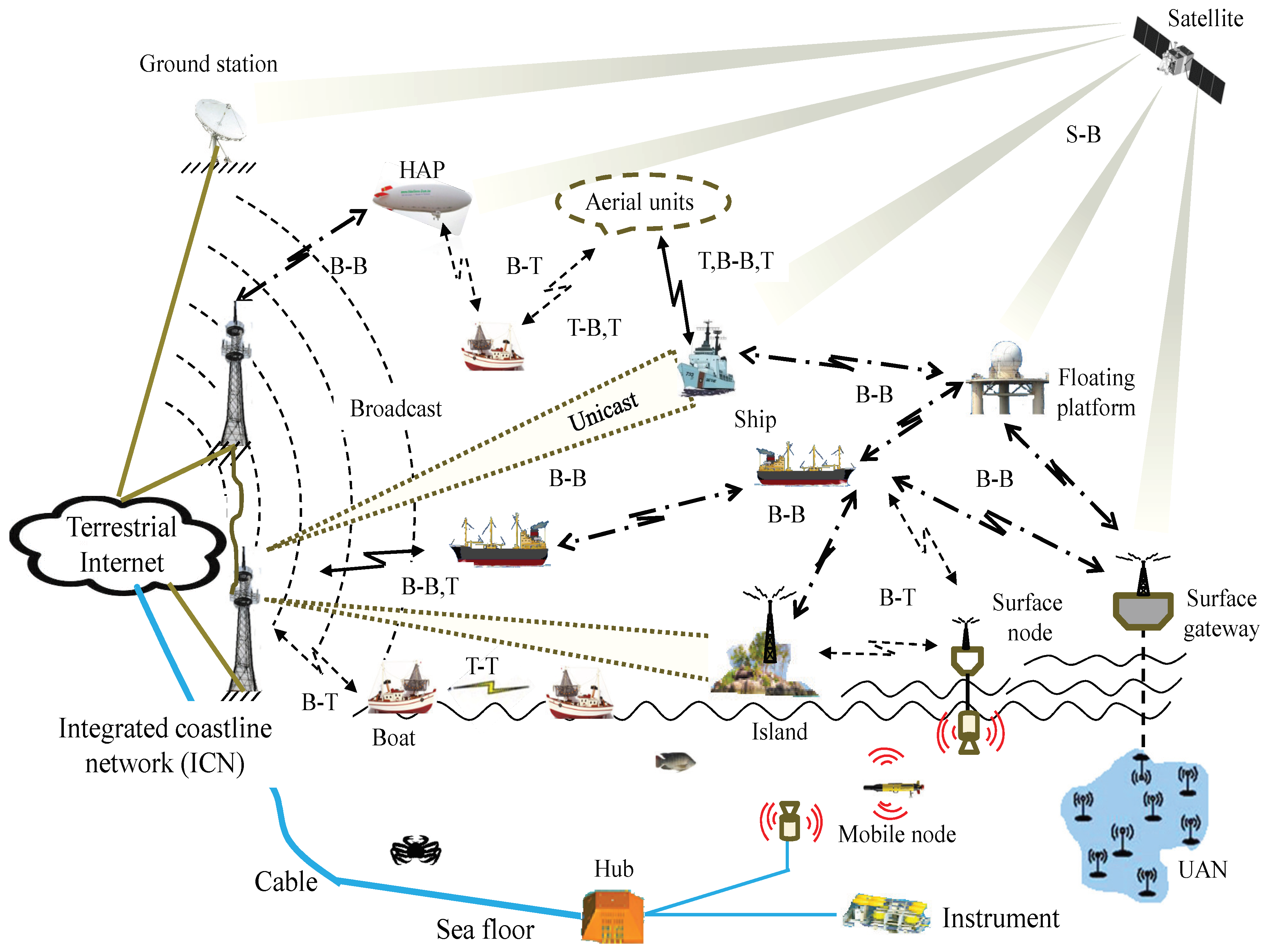
73]. As illustrated in
Figure 5, this network mainly consists of integrated coastline networks, various types of WANETs and sky networks as well as underwater networks. These networks try to interconnect each other as much as possible when necessary, as discussed below.
5.1. Integrated Coastline Network (ICN)
An ICN aims to not only extend cost-effective terrestrial Internet services to near water areas in oceans, but also enhance maritime radio systems for large service capacity. Although the ocean is huge, actually most human activities therein take place in water areas near coastlines. For example, many domestic maritime shipping routes are set about 2–20 nautical miles away from the coastline (1 nautical mile = 1.852 km). This phenomenon is further shown by
Figure 2a, where ship traffic density near the coastline is much higher than that in other water areas, showing the majority of marine Internet users are distributed therein.
An ICN tries to integrate mobile communication and maritime radio systems to achieve the following objectives:
Making use of the abundant radio spectrum of mobile cellular systems in oceans to overcome the bandwidth bottleneck of the maritime radio system and improve the utilization of precious and expensive radio spectra, while extending terrestrial Internet services to near water areas. Some well-developed functions of maritime radio systems can be used to set up network connection in oceans. For example, long-range low-rate communication can be used as signaling for networking. Furthermore, the infrastructure for both systems including those for AISs can also be integrated to reduce deployment cost.
Exploiting newly developed technologies to improve service capability in oceans [
19,
20]. For example, a combination of radio over fiber (RoF) and distributed antenna systems has been considered as a promising technology to increase the capacity of mobile cellular systems, with which a BS can be simplified into an antenna system equipped with a tx/rx module relaying radio signal. Multiple such systems are linked through optical fibers to a central unit for further processing of signaling, communication and networking [
20]. Duct communication can be used to support long-range communication at high speed in oceans.
The ICN illustrated in
Figure 6 is mainly composed of terrestrial BSs probably installed near or along coastlines or on islands, acting as a gateway between the terrestrial Internet and marine Internet. Then, terrestrial Internet service can be extended seamlessly to near water areas, where the majority of marine Internet users are present. The current maritime radio services are privileged over other marine Internet services with higher requirement on reliability, timeliness and accuracy. This strategy can create a win–win situation to mobile operators, maritime transport and marine industries (e.g., offshore oil industry), ocean scientists and other marine Internet users.
5.1.1. Exploiting of Mobile Cellular Spectra
As mentioned above, the maritime radio system is short of bandwidth to satisfy their ever-increasing communication demands, while mobile systems have many expensive spectra, as listed in
Table 7. However, thus far, most of these bandwidths mainly cover terrestrial environments. To enhance maritime radio systems and improve utilization of these spectra, it is inspiring to exploit these spectra and the corresponding technologies to provide cost-effective marine Internet services.
After more than three decades of development, mobile systems have become the most successful enabling technologies for mobile Internet access available anytime and anywhere. Thus, expending these services to near water areas in oceans can satisfy many marine Internet users. The communication services provided by maritime radio systems have to be reliable, timely and accurate, especially for real-time navigation, distress beacon transmission and rescue as well as safety operations. These services have been successfully provided by the current maritime radio system. The enhanced maritime services should be privileged in using the shared spectrum of mobile cellular systems.
5.1.2. Communication Links
Typically, there are two types of nodes present in water areas: a terminal (T), such as a mobile phone, and a BS. A terminal cannot relay signals from other nodes such as other terminals but a BS can. As illustrated in
Figure 6, the following communication links may co-exist in oceans:
Terminal to terminal (T-T): Two terminals communicate with each other directly in an ad hoc mode. For example, on small boats without BSs, as in
Figure 6, users onthe boats can use their handsets to communicate with each other directly.
Base station to terminal (B-T): BS–terminal communication is the primary communication scenarios here, such as between mobile phones and cellular BSs or APs. BSs can be installed along the coastline, on islands (called terrestrial BS-TBS) and vessels or even on HAPs (called vehicular BS-VBS).
Base station to base station (B-B): This kind of link is used to relay signals between BSs with the following combinations: TBS-to-TBS, TBS-to-VBS and VBS-to-VBS. TBS-to-TBS can be either a wired or wireless link, depending on geographical conditions and deployment cost. Both TBS-to-VBS and VBS-to-VBS are wireless links used for communications with various types of vehicles such as ships and cars.
Satellite to base station (S-B): This kind of link is used to connect satellites with BSs to access terrestrial Internet or communicate with vessels or floating platforms in oceans.
Hydrophone to hydrophone (H-H): It is an underwater acoustic link used to connect acoustic communication nodes. Electronic–acoustic signal conversion is carried out between acoustic nodes and RF nodes on water surface.
In some cases, multiple types of links may co-exist such as base station to base station/terminal (B-B,T) and terminal/base station to base station/terminal (T,B-B,T). As illustrated in
Figure 6, when a ship is close to the coastline, users therein can communicate the TBS directly, while the onboard VBS can also communicate with it. The aerial unit in
Figure 6 refers to a collection of air planes, helicopters, balloons and drones mentioned above, some of which can have BSs while others may not. In this case, T-T, T-B and B-B links may exist.
5.1.3. Adaptive Service Coverage
Broadcast and point-to-point communications can be jointly applied to provide cost-effective services following the distribution of marine Internet users. Usually, user distribution near the coastline or in busy water canals are relatively high, and broadcast communication is preferable. In remote water areas, marine Internet users are distributed sparsely, and usually crowd in moving ships. In this case, point-to-point communication using directional antennas can focus the signal to the corresponding water areas with reduced interference to other areas.
Particularly for shore-to-ship communication, a tracked point-to-point communication link can be established for long range high-speed communication. That is, a TBS and a VBS establish a point-to-point link using directional antennas. As the ship is moving, the antennas also rotate accordingly to maintain the best point-to-point communication quality. If the ship is moving out of the effective coverage of the current TBS, a handoff will be triggered to find another TBS to maintain the service. This is feasible since the TBS can have the position information on a ship though the AIS or the report of the ship, while ships usually move at relatively slow velocity. A ship in progress of communication with a TBS can also relay signals for its neighboring terminals or vessels.
The following polices can be used by either a terminal or a VBS to select a communication link:
A terminal selects a communication link with the best channel quality and acceptable link cost. If a terminal (e.g., in a small boat) is located in or near a vessel equipped with a VBS, the terminal links the VBS in the following cases: (i) it cannot communicate with any other TBS; or (ii) the link quality is much better than that of any TBS link without incurring extra cost.
A VBS selects a TBS link with sufficient channel quality and acceptable quality of service (QoS) to avoid extra latency caused by communication relay via other VBSs, since a TBS is usually much more powerful than a VBS.
To efficiently support inter-BS communications, a spectrum band should be allocated to create a dedicated channel, with which BSs are organized into a mesh network, and directional antennas can be used to improve the communication quality.
5.2. Versatile Auxiliaries of WANETs
As mentioned in
Section 4.6, there are many types of WANETs in oceans, which can be used jointly with integrated coastline networks (ICNs) to intensify service density and expand service coverage as well as provide opportunistic networking services, as discussed below.
A WANET is used to provide communication between nodes in the same WANET mainly for intra-vessel communication in oceans. This is particularly useful for cooperative operations among many vessels.
In the coverage of an ICN, there may be small boats that cannot connect to it directly. If there are some ships able to link the ICN around these boats, they can connect these ships in order to access the ICN through WANETs. These boats themselves can also form a WANET. Similarly, the coverage of an ICN can be extended beyond its original coverage through WANETs so that vessels far away from the ICN may also have access to it. If necessary, a HAP can be developed occasionally for temporary operations.
Opportunistic networking services can be provided via WANETs such as AANETs mentioned above without long-term connection between nodes. For example, aerial units communicate with marine Internet users to collect data, and then look for chance to deliver or relay data toward the destination. This kind of network is particularly useful when neither ICNs nor NANETs are available, and may become the only chance for a node to communicate with others.
5.3. Reliable Backup with Satellites
Both ICNs and WANETs are working well in water areas near coastlines, which are just very small portion of the ocean. For example, the water area 100 km away from the coastline only accounts for 9.6% of the ocean surface, as mentioned above. For marine Internet users sparsely distributed in remote water areas, the basic communication services for security and distress rescue operation as well as maritime production should be guaranteed. Since satellites are the only option available now in this situation, they can be used as a reliable backup solution for emergency when no other networks are available. For big buyers, satellites can be a reliable solution of pervasive Internet access anytime, while probably as the last option for other users.
5.4. Interconnection of Underwater Networks
As mentioned above, the high-speed coverage of a UAN is very small, and many UANs should be deployed in different sites for high-speed wide coverage. However, these networks are usually isolated from each other, and interconnecting them is necessary. This can be achieved with the following methods.
Underwater internetworking: This can be achieved by using deployed seafloor cables to link underwater networks such as those for cabled underwater observatory systems. This method can provide high-speed reliable network connections and sustainable power supply. However, it is difficult and costly to densely deploy such infrastructure for wide underwater coverage. Alternatively, underwater acoustic links can be used to connect these networks directly, which is simpler and cheaper than using cables but with small capacities for communication and power supply. The performance also degrades quickly as the number of links increases due to slow acoustic propagation speed and low transmission rates.
Internetworking on/over water surface: This can be realized through jointly using RF, acoustic wave or green/blue lasers. That is, each UANET links a surface gateway, which collects data from the UANET and forward it to the sink, and can broadcast data to the UANET linked to it. The gateways themselves can form a surface WANET or connect a backbone network such as a satellite or a NANET. This method can avoid severe performance degradation of the underwater internetworking mentioned above, and is more flexible, easier and cheaper but without provisioning of power supply to underwater devices.
5.5. Internetworking Structure
Figure 6 depicts an internetworking architecture for marine Internet. Here, the ICN plus NANETs acts as a backbone network, which connects marine Internet users directly to the terrestrial Internet. This backbone network can further connect HAPs or ANAETs if any to intensify its service density and expand its coverage, while all these networks can connect satellites to provide reliable services. The backbone network can also interconnect various types of underwater networks to realize underwater internetworking, and connect them to other networks on/over the water surface such as the terrestrial Internet. Actually, if we treat each above network as a special networking node, the marine Internet is just a super-scale WANET.
Marine Internet tries to provide cost-effective network access according to application requirements by exploiting any networking opportunities as much as possible with the following preference: ICNs are always selected first if any, then WANETs and/or HAPs are exploited with satellites as the backup, as described below.
When a node is covered by an ICN, it is better to use this ICN for network access since it is cost-effective.
When a node is out of the coverage of an ICN, while there is a NANET around, it tries to use this NAENT for network access.
In other cases, if there is a HAP that can also move around quickly on demand to provide network access, the node tries to link this HAP.
If all the above attempts fail, while the data to be transmitted can tolerate delay and loss, the node can try opportunistic networking by looking for AANETs.
If the data are critical or the node is in an emergency situation, the node tries to connect to a satellite.
5.6. Summary
The above internetworking strategy of marine Internet tries to exploit any communication resources available in oceans as much as possible without relying on any particular one. This makes marine Internet very robust with strong viability. Among them, the ICN plays an important role to provide cost-effective marine Internet services in water areas near coastlines, and various types of WANETs can intensify, extend such service and provide opportunistic networking. The satellite networks are used as reliable backups.
6. Challenging Issues for Marine Internet
Marine Internet is still in its infancy stage with several challenging issues to be addressed. The major challenges stem from handling heterogeneity and dynamics in communication and networking capabilities and air interfaces of network nodes composing marine Internet. These factors make it very hard to assure end-to-end performance in terms of reliability and QoS. Transient Internet users and mobile BSs (e.g., on-board BSs) make network security and mobility management very difficult. There are also many challenging issues for underwater networking, such as MAC protocols [
68], routing protocols [
69], end-to-end reliability control [
70] and network security [
74] for UANs. These issues have been discussed in the literature and are ignored here.
6.1. Interconnecting Networks with Dynamic Borders
An open network structure with hybrid communication interfaces is necessary to accommodate various types of networks and make them to cooperatively provide cost-effective service to marine Internet users. For interconnecting terrestrial networks or satellite networks, network borders are almost stationary or their traces are predictable. In this case, networking configuration and interfaces can be pre-studied and pre-setup for performance optimization as done in terrestrial networks. However, for marine Internet, many network nodes are vessels equipped with BSs for communication and move in oceans. Therefore, network borders are moving relative to coastline networks, vessels and other objects on the water surface, satellites as well as underwater networks. It is necessary to handle these issues for optimizing internetworking performance in real-time with heterogeneous air interfaces and network protocols in such large-scale networks. This issue becomes much more challenging when always-on connection between any nodes cannot be guaranteed in oceans.
On the other hand, dynamic network borders also cause the conventional network addressing schemes based on structured network addresses unsuitable in marine Internet. A structured network address such as the IP address usually contains some information related to the geographic location of the network node. This information is important for internetworking, particularly for fast routing with a hierarchical network structure. As mentioned above, in marine Internet, many network nodes are vessels equipped with BSs, which often change their locations in large scale, e.g., from one continent to another. Therefore, it is necessary to study an addressing scheme able to adapt itself to constantly changing locations of network nodes. Furthermore, such moving BSs also cause problems to mobility management, as discussed in
Section 6.4.
6.2. Super-Scale WANET with Real-Time Agility
As mentioned above, marine Internet is a super-scale WANET with opportunistic networking, which needs to accommodate various types of networks to provide cost-effective network services according to application requirements in dynamic networking environments. This requires the WANET to be smart enough to make real-time decisions on selecting proper communication and networks automatically when networking conditions change. Basically, the following issues have to be addressed.
Transmission control adaptive to dynamic user distributions: The coastline network is the key to provide cost-effective network services to marine Internet users. As illustrated in
Figure 6, the TBS can use broadcast or unicast communication to link vessels according to the user distributions, i.e., broadcast is favorable for dense distributions usually occurring in near water areas, where users usually carried by vessels can directly communicate with the TBS when under its coverage. Unicast is better used to link a TBS to a particular vessel usually located in far water area, and large transmission power is needed for long-range high-speed communication. However, moving vessels change user distributions so that these transmission arrangements have to change too. It is necessary to study when and how to change so that the overall communication quality can be maintained and optimized.
Real-time network selection with predictable performance: As discussed in
Section 5, network nodes in marine Internet needs to select networks on real-time in order to provide the users with cost-effective services. An open issue is how a network node can perceive possible changes to occur in the candidate network so that the selected network can provide satisfactory services for a predictable time; otherwise, the node may frequently change networks, which will affect networking performance. This issue becomes more challenging when candidate networks are NANETs or AANETs due to their dynamic networking performance, which will further affect several end-to-end networking performance indicators, as discussed below.
6.3. End-to-End Reliability and Security
Since marine Internet consists of heterogeneous and mobile network nodes that a network path may go through, typically including various types of vessels, airborne vehicular and satellites. How to ensure end-to-end transmission reliability in terms of connectivity, network resource allocation as well as QoS is very challenging. Although similar issues exist and have been addressed for conventional mobile ad hoc networks (MANETs) and opportunistic networks [
75], they are not comparable to marine Internet in terms of network scale and heterogeneity of network nodes with different communication and power capacities as well as networking capabilities. Different from terrestrial environments in which there are many cost-effective networks other than MANETs, in oceans, so far there is no alternative to marine Internet for provisioning cost-effective networking services, and these issues have to be studied.
Similarly, how to ensure end-to-end networking security is another important and difficult issue. In oceans, it is necessary to encourage more collaboration between different network nodes in order to maximize network performance at low cost. However, oceans are insecure cooperative environments, in which friendly and hostile nodes co-exit, and most of marine Internet users are transient from different places through vessels. In this case, how to carry out the authentication for users and network nodes, and how to defend marine Internet from security attacks are two challenging issues especially when there is no guarantee on always-on connectivity to the authentication or management center located on the land.
6.4. Mobility Management with Mobile BSs
In terrestrial mobile systems, mobility management include user’s location management and handoff support. The former aims to maintain connectivity and services when a user changes his/her location on a large scale such as moving from one city to another. The latter aims to maintain the continuation of a communication in-progress when the user moves in the course of communication due to switching contact points, i.e., a BS/AP [
21]. Here, the user connects to the network through a BS/AP, which is stationary (except satellites, which however their motion traces are predictable), and connects with other networks such as Internet. The basic idea of maintaining the connectivity of a mobile user is to assign a temporary network identity to the user after it moves out of the home network to a foreign one. Since this temporary identity is corresponding to the network address of the BS/AP (e.g., IP address) that the user is attached to, the mobile user can be connected via the BS/AP.
In most cases, marine Internet users are carried by moving vessels each equipped with a BS/AP, via which the user connects with other networks. If a marine Internet user is assigned with a temporary network identity similar to the terrestrial mobile user, the connectivity cannot be maintained because the onboard BS/AP has to connect other networks such an ICN, which however changes relatively to the vessel’s motion. In this case, the temporary identify can be reached by the onboard BS/AP but not by the other networks. This issue becomes more complex when a vessel cannot contact an ICN or a satellite but via other relaying vessels instead.
As a vessel is moving, switching of contact points between the onboard BS/AP and the one for other networks causes handoff to occur in batch (i.e., for all on-going communication sessions of the users in the vessel). This is different from per-call handoff in terrestrial mobile networks, resulting in handoff processing more challenging, especially when different types of sessions (e.g., voice, data and video) are present in the same batch. Furthermore, as mentioned above, both broadcast and unicast communications may be used; as vessels move, a user originally under broadcast communication may require unicast communication, and vice versa. This feature further complicates handoff process.
7. Conclusions
The above discussion can be concluded with the following points. (i) At present, although there are many communication systems available as well as several new networking technologies under development, none of them alone can provide an effective solution for cost-effective network access in oceans due to huge size and hybrid as well as complexity of the networking environment in oceans. This environment is mainly composed of coastline network, water surface networks, underwater networks and networks above water surface. (ii) In this case, the best solution should be able to maximize exploiting any communication and networking resources available in oceans, which is the principle of marine Internet and termed as best-effort networking here. (iii) The network structure for marine Internet is large-scale cooperative heterogeneous and dynamic wireless networks, while the coastline network and the network above water surface can constitute a backbone network to efficiently support marine Internet users in water area near the coastline, where the majority of human activities in ocean take place. (iv) Underwater internetworking can be supported by the above backbone network, through which, underwater networks can connect not only with each other but with also terrestrial Internet.
We believe that marine Internet will become more and more important to support and expand human activities in oceans. To foster its development, more studies are necessary to address the challenging issues discussed in
Section 6 with the following research objectives.
We need to study and develop an end-to-end platform unified to all applications, while this platform can run over different types of networking units in marine Internet, such as various types of wireless nodes and sub-networks/systems. Different from the TCP/IP system used by the terrestrial Internet where wireless links are mainly used as last miles of the end-to-end connection, in marine Internet, many links of an end-to-end network connection may be wireless with different communication capacity, reliability and media.
It is also necessary to study and develop a link management and neighbor discovery system to efficiently discover, locate and exploit all possible types of communication resources available in oceans. This system is important for marine Internet to provide cost-effective networking services in real-time to deal with high dynamic link status in oceans with acceptable networking reliability.
Due to high and real-time dynamic networking environments in oceans in terms of network topologies, link capacities and reliability as well as availability of energy sources, channel security level, etc., a networking unit should be able to make real-time decisions on link and route selection to satisfy application requirements cost-effectively as much as possible. To this end, it is necessary and interesting to study how artificial intelligence can be used to improve the performance of networking units for decision-making.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}