A Spatial Prediction-Based Motion-Compensated Frame Rate Up-Conversion

Abstract
:1. Introduction
- (1)
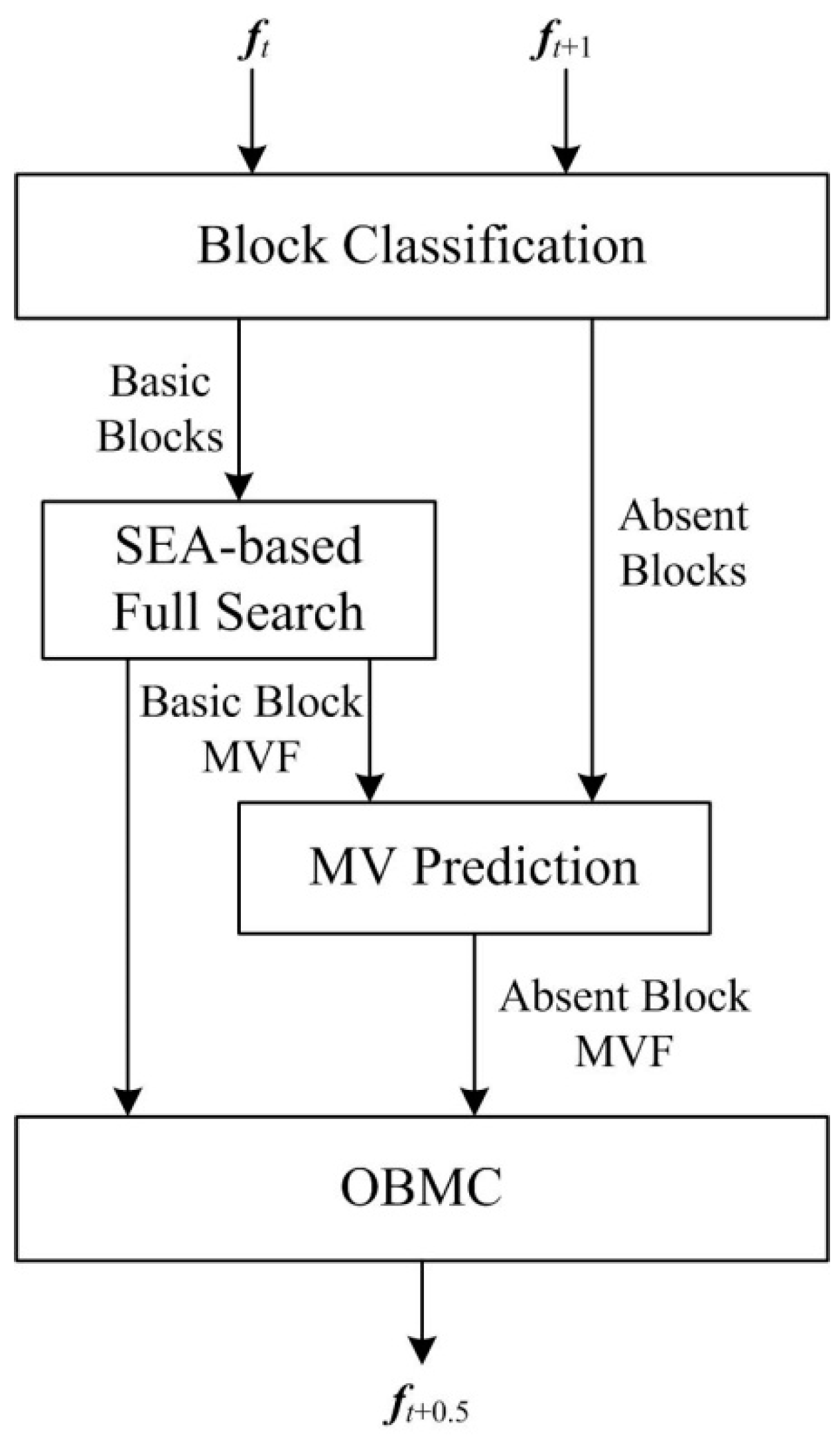
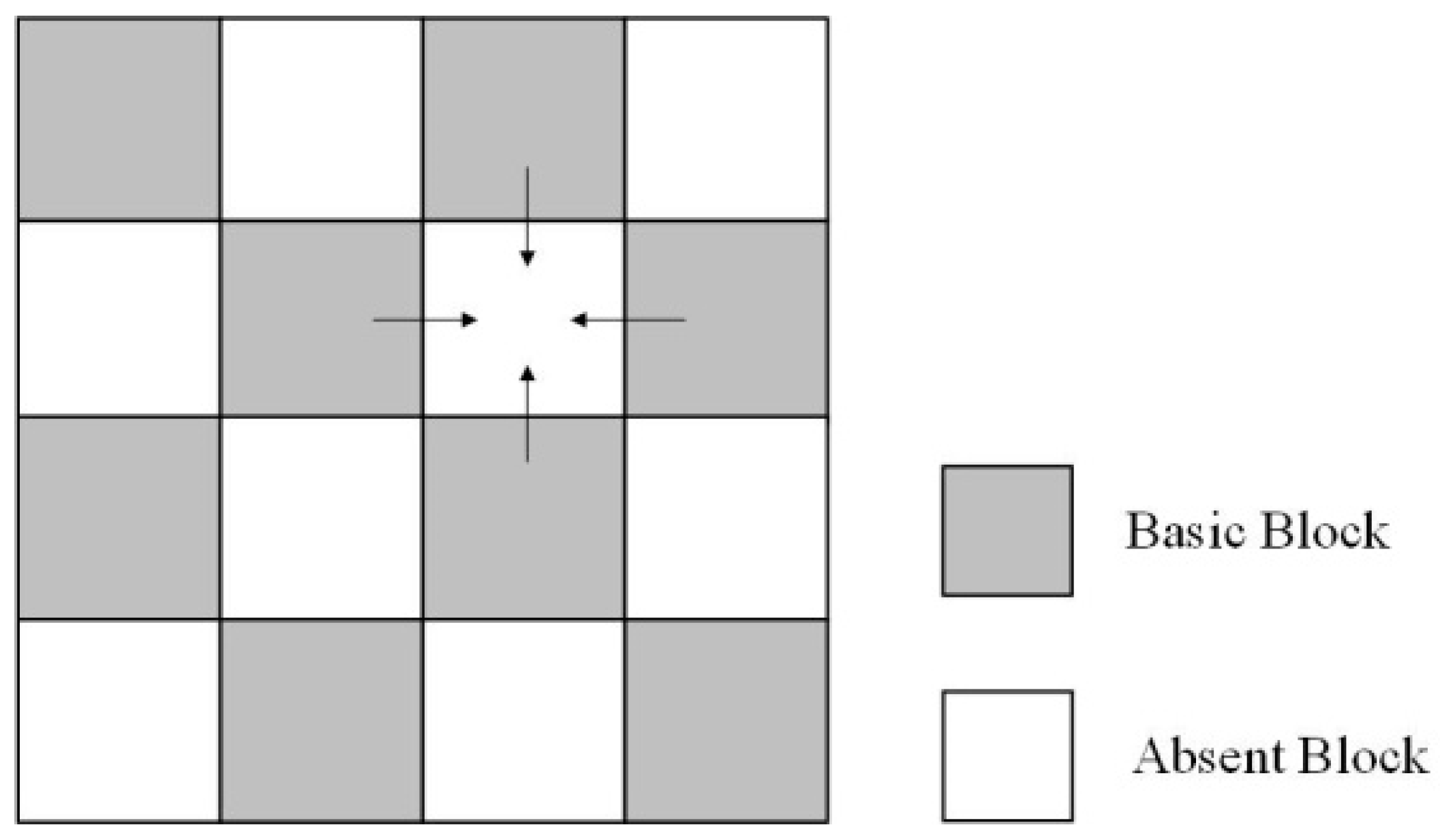
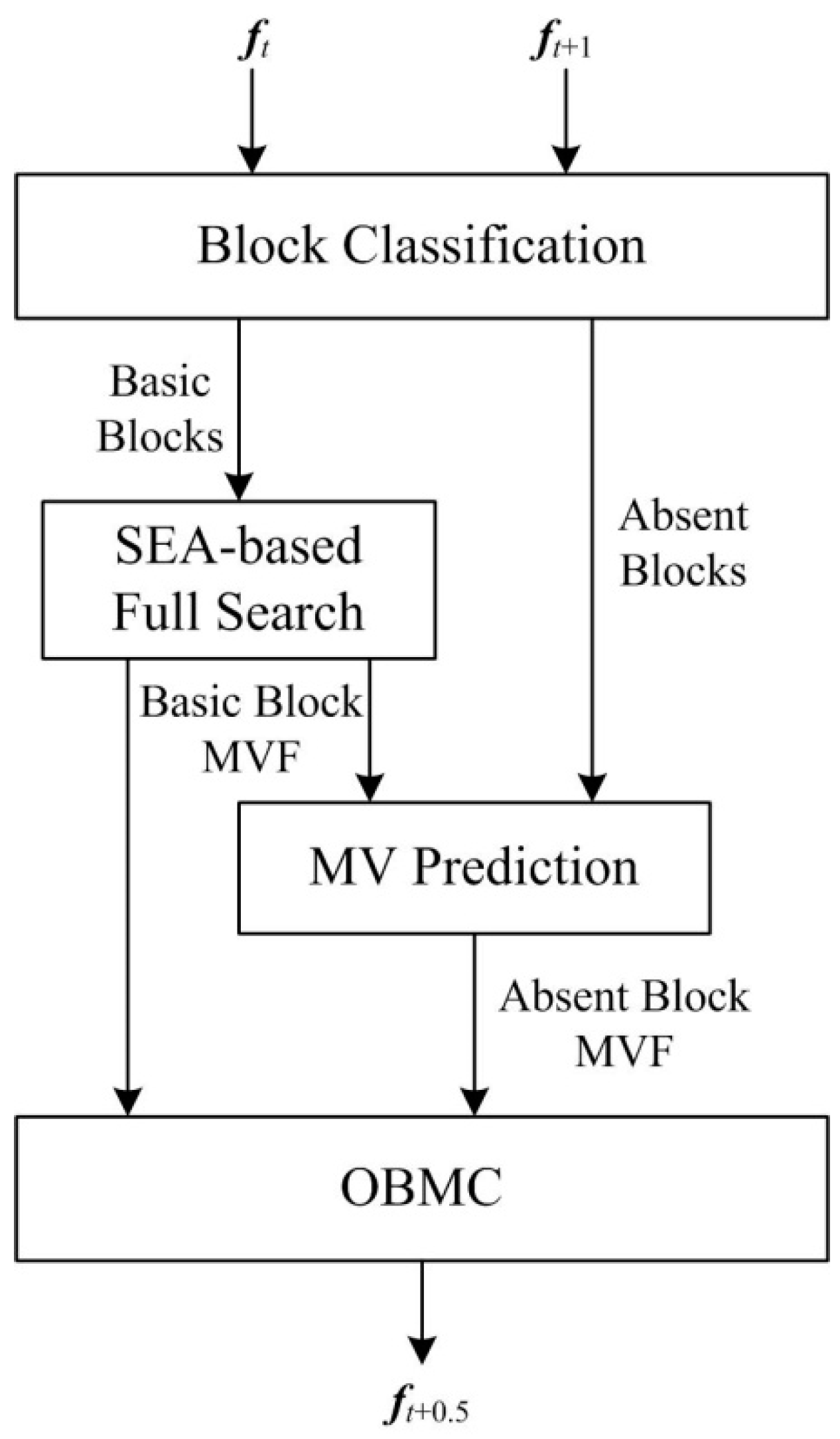
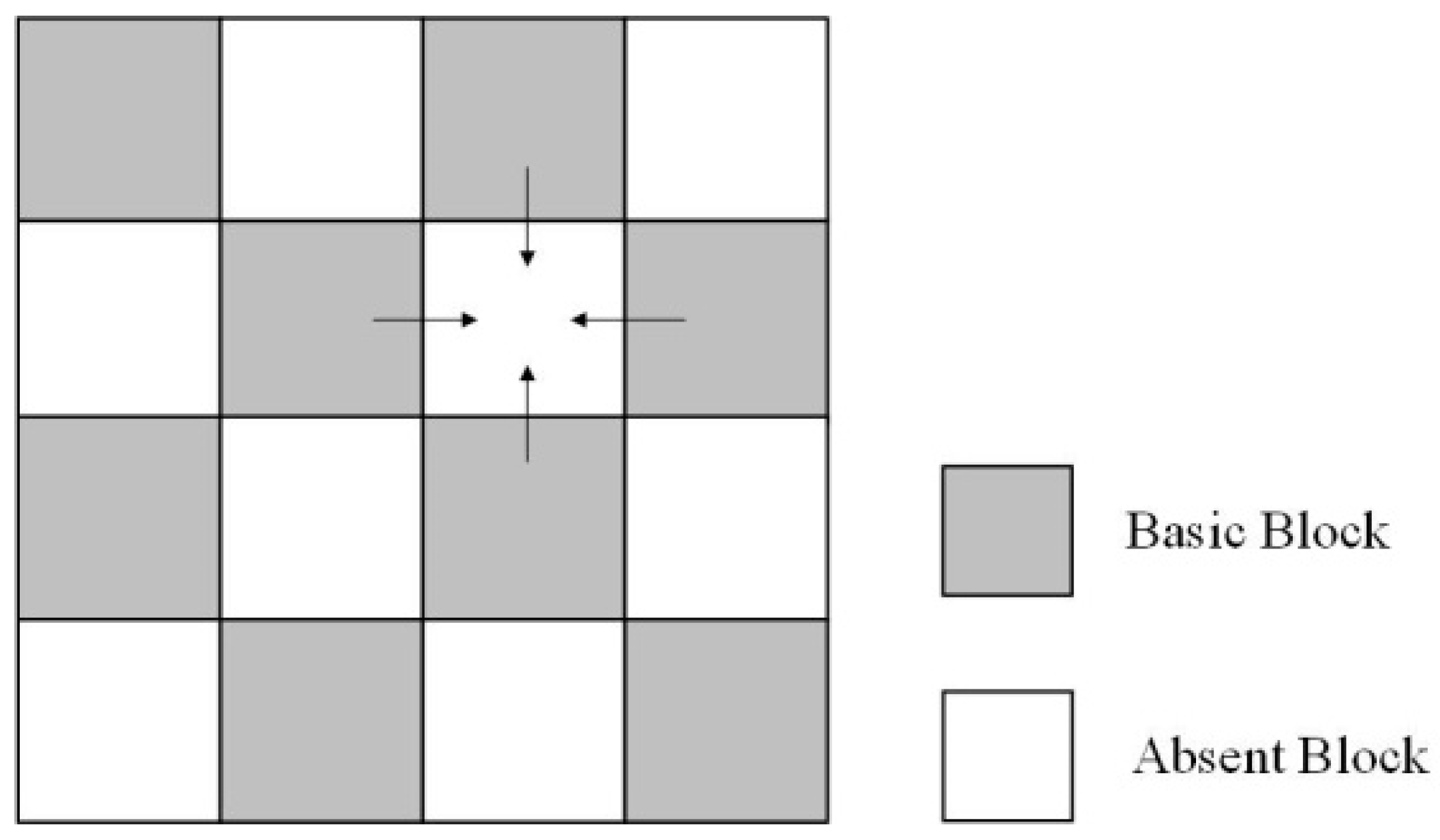
- A predictive model defines two kinds of blocks: basic block and absent block. BME is directly performed to compute the MV of basic blocks.
- (2)
- To speed up BME, the Successive Elimination Algorithm (SEA) [23] is used to reduce search candidates, and the block matching is performed with a subsampling pattern.
- (3)
- The MV of absent blocks will be accurately recovered from MVs of its neighboring basic blocks.
2. Proposed SP-MCFI Algorithm
2.1. Block Classification
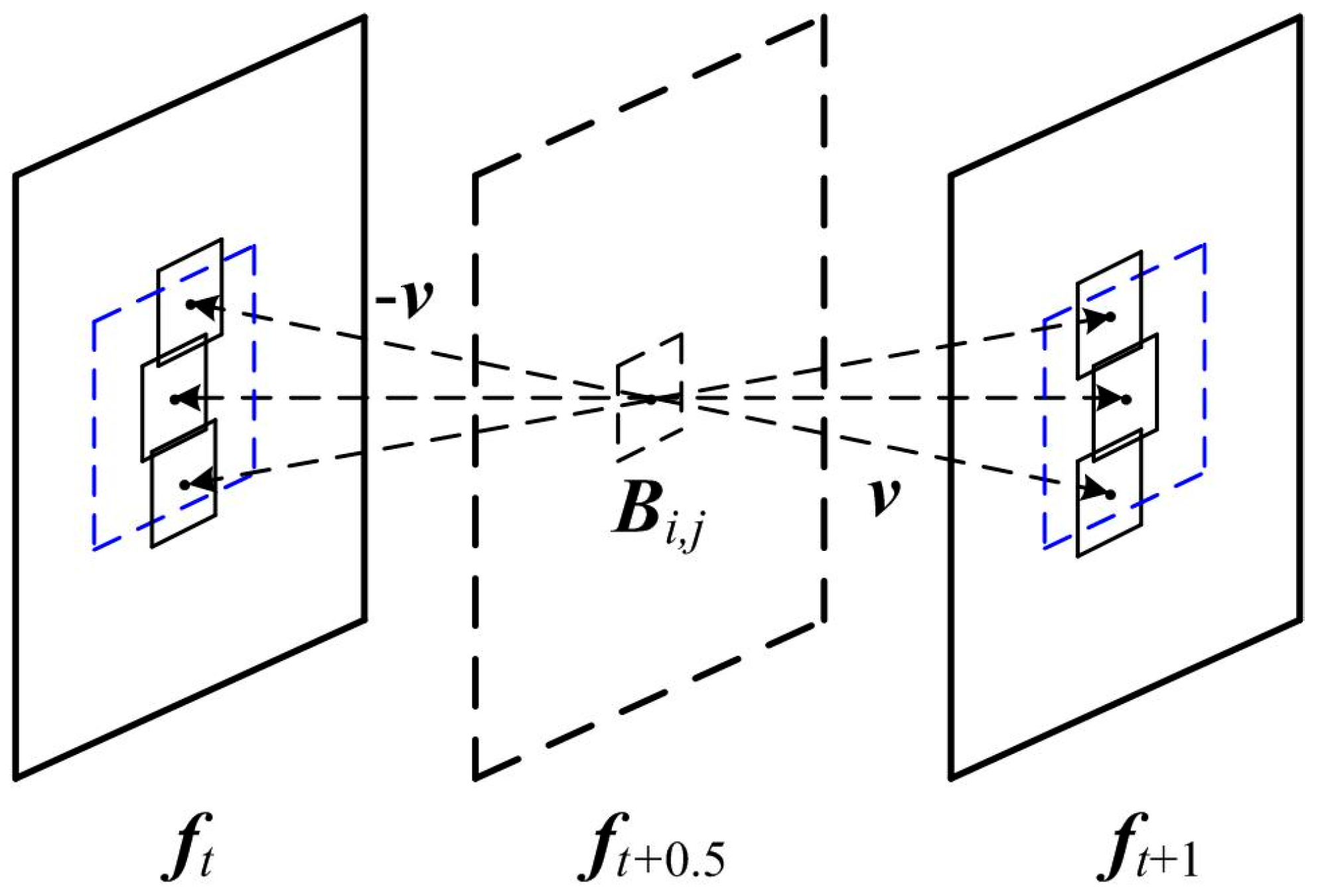
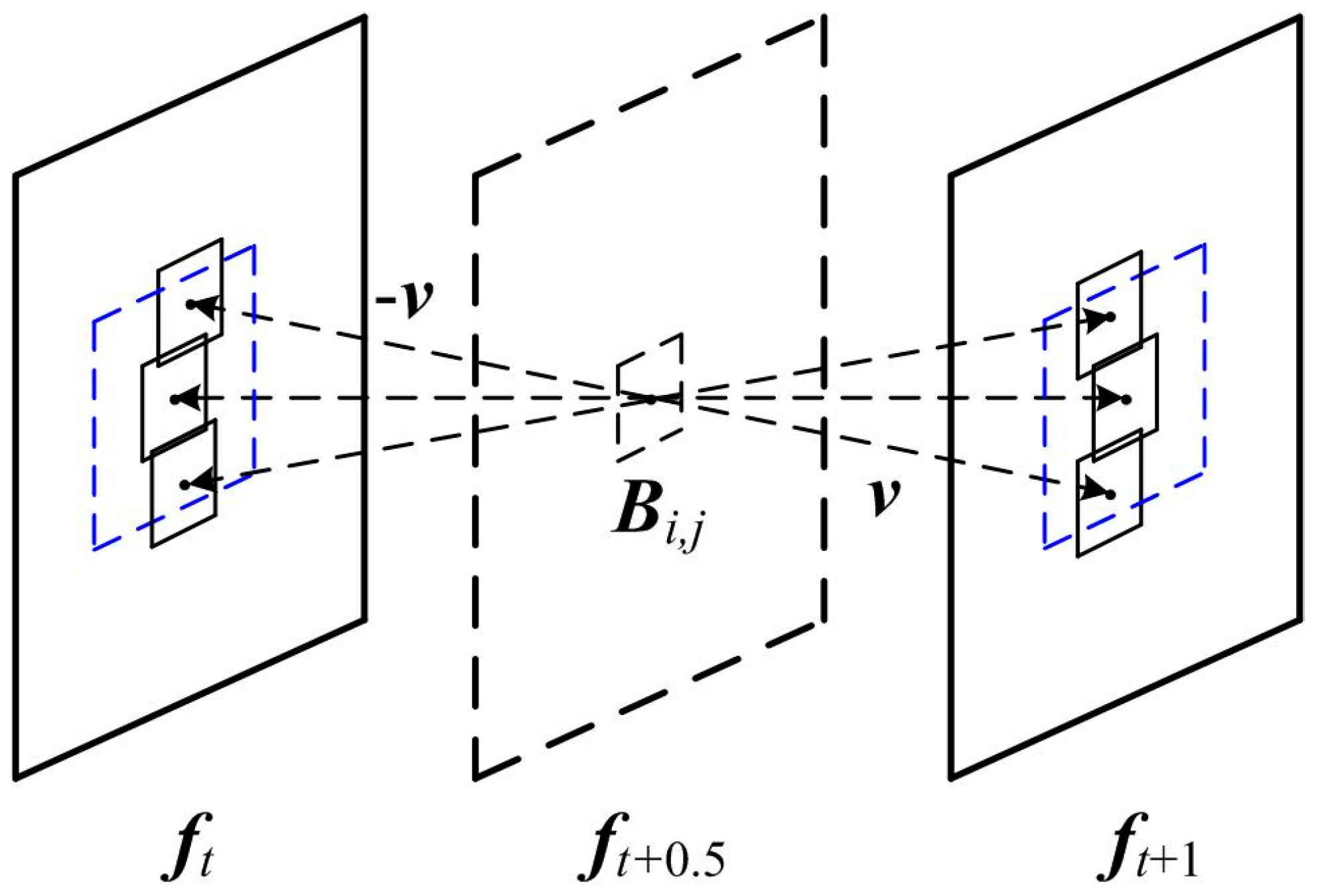
2.2. BME for Basic Block
2.3. MV Prediction for Absent Block
3. Experimental Results
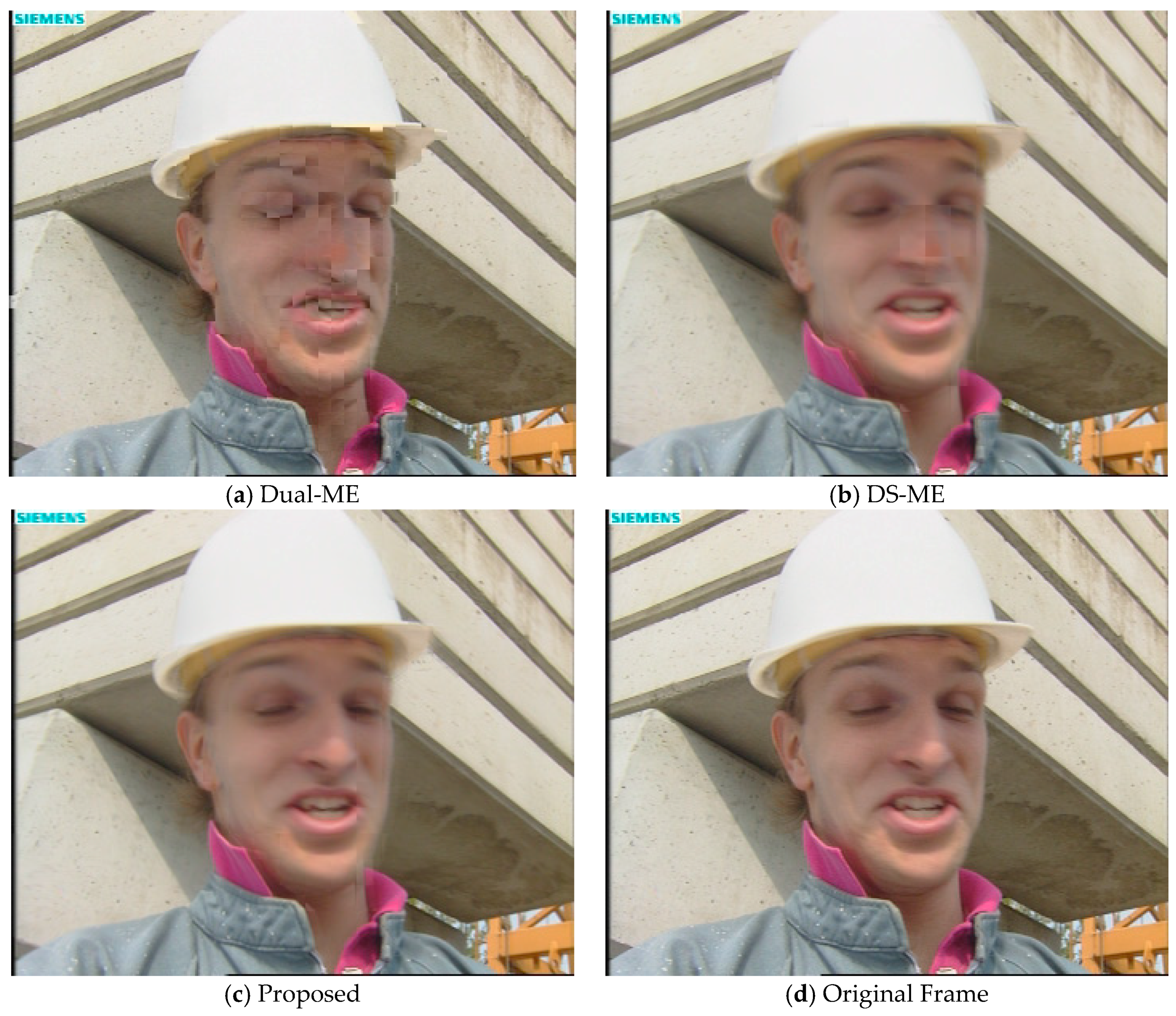
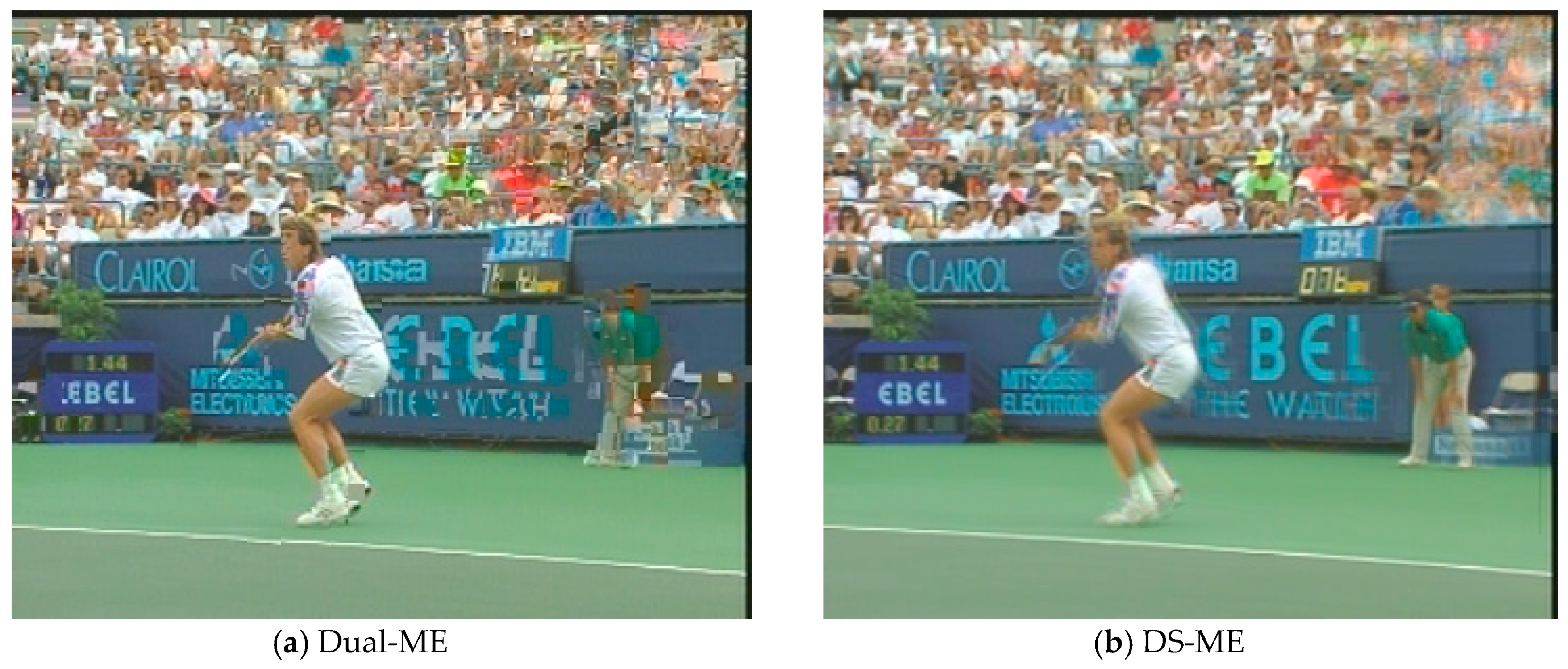
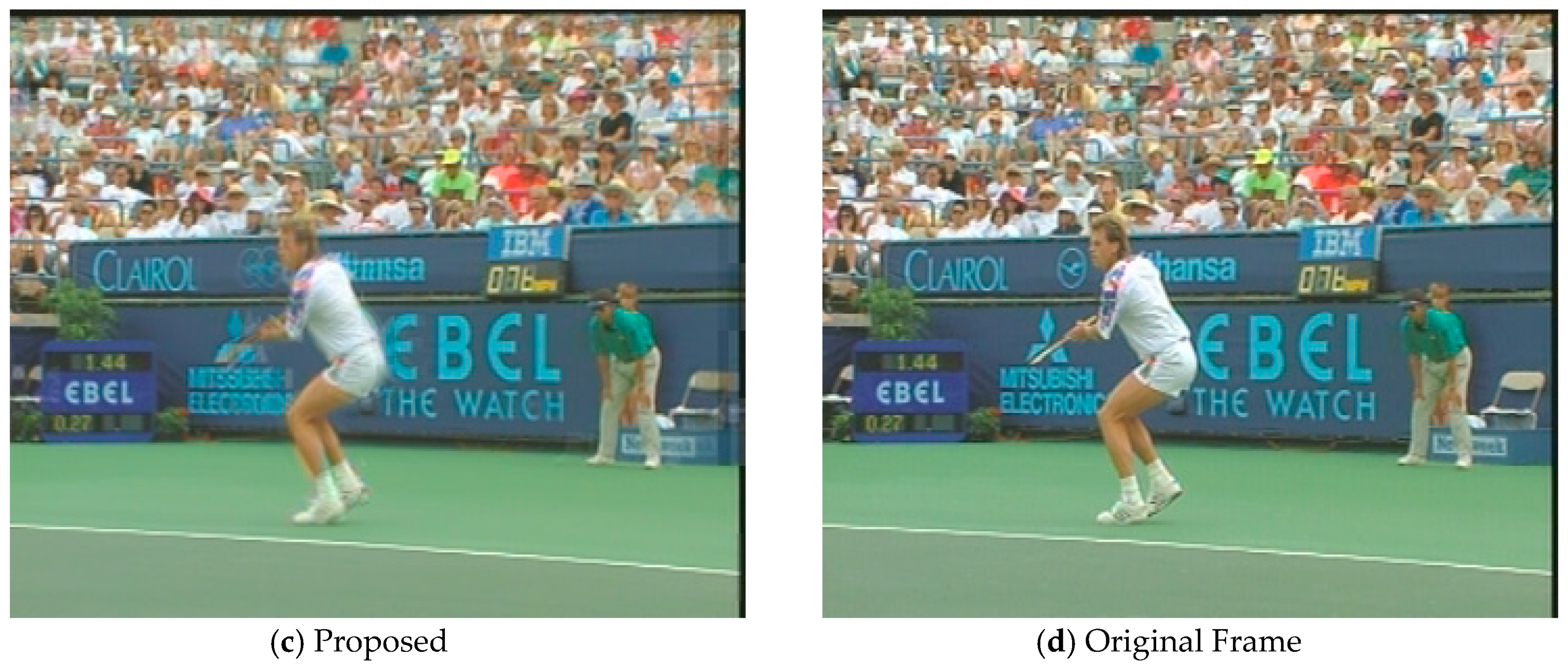
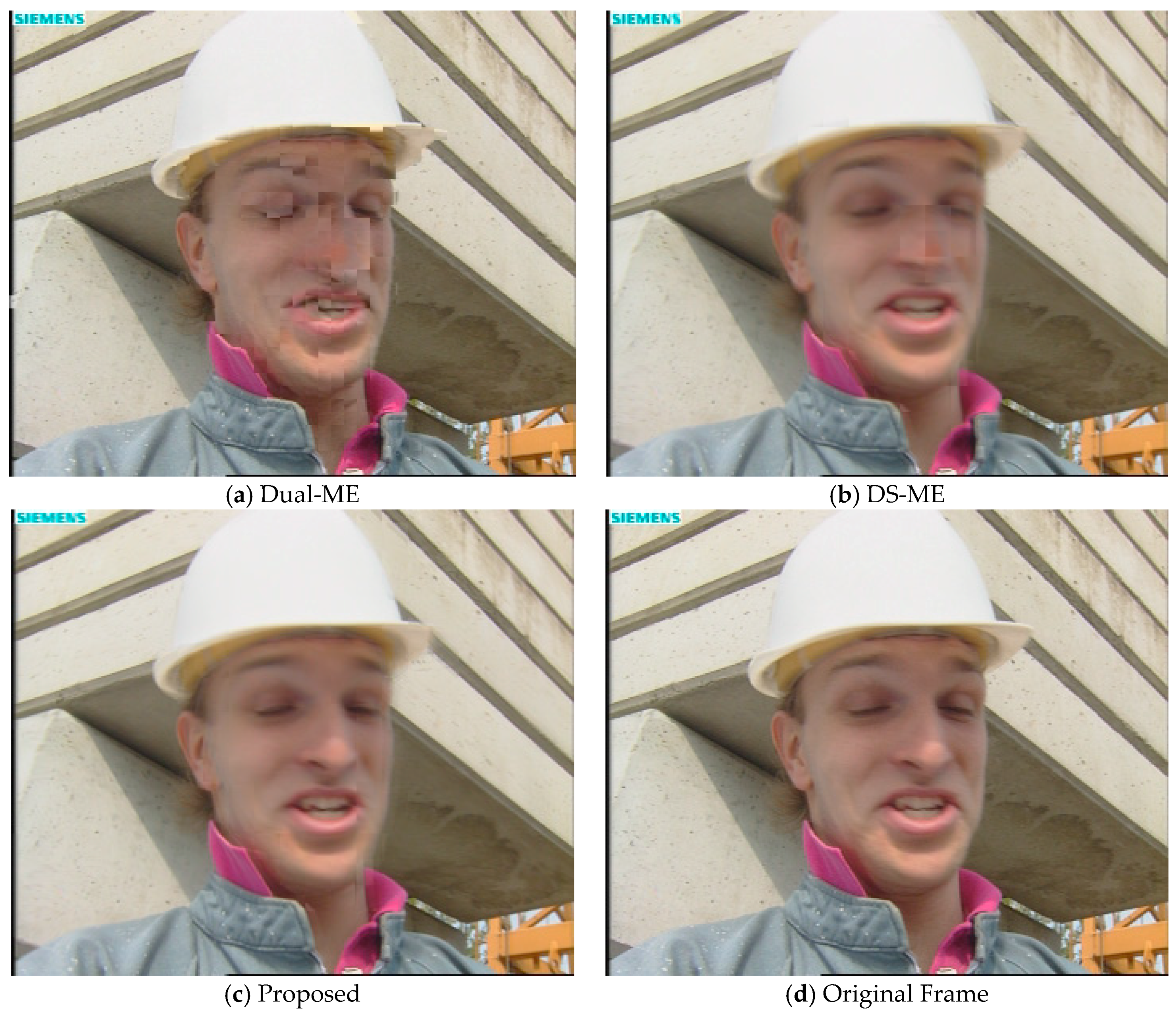
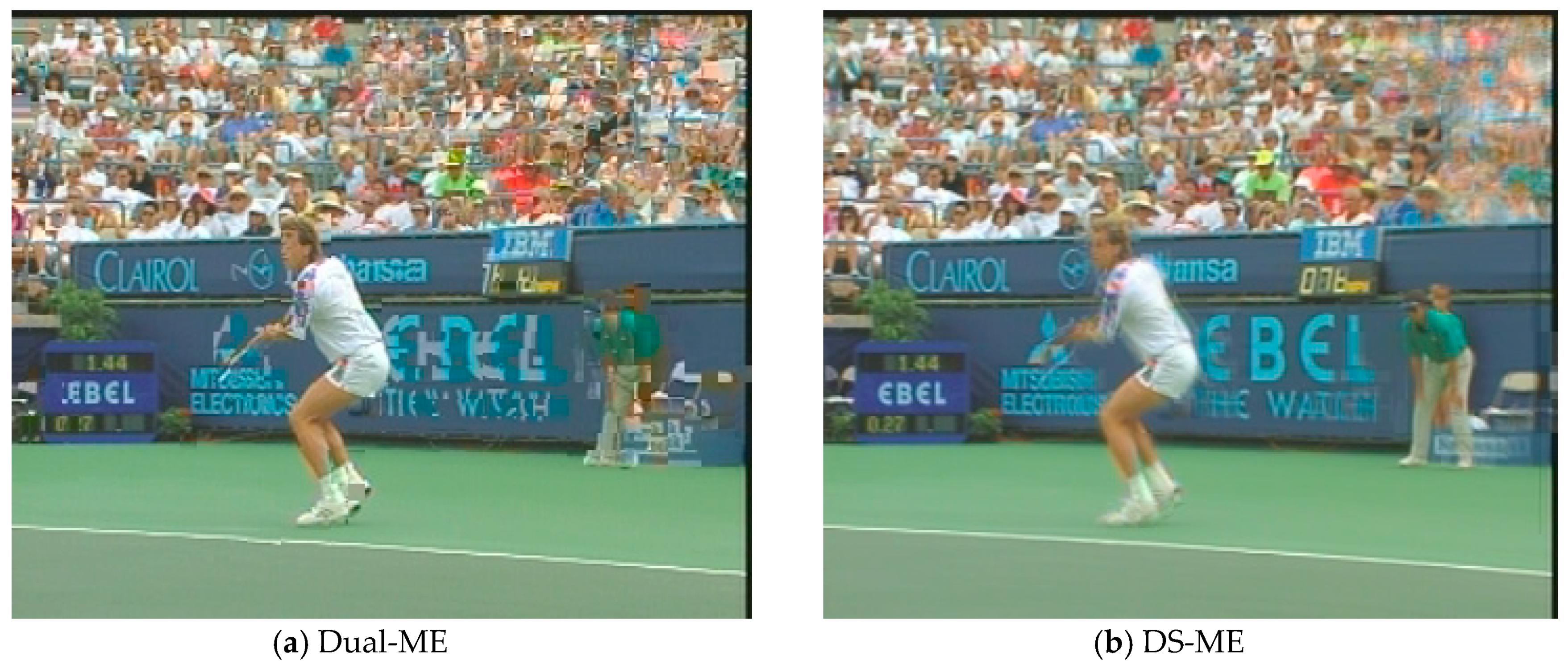
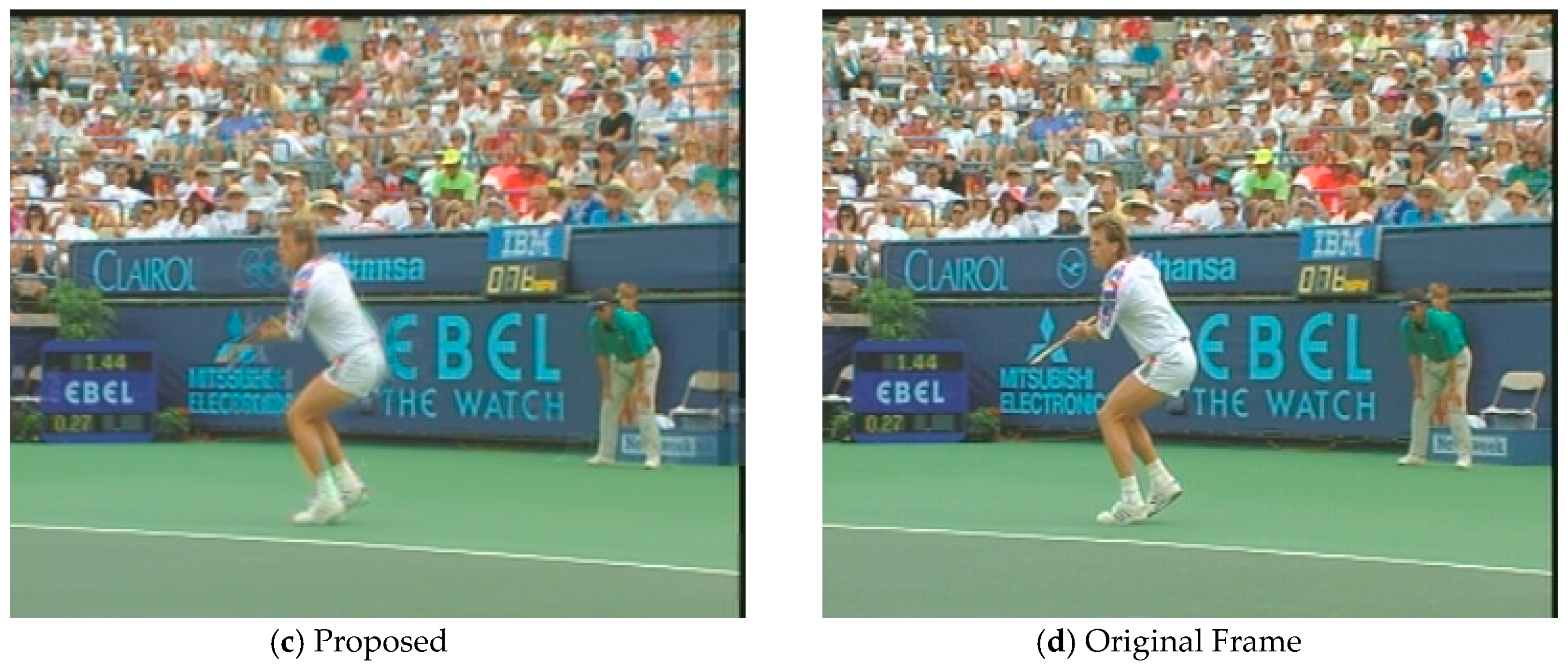
3.1. Subjective Evaluation
3.2. Objective Evaluation
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lu, Q.; Xu, N.; Fang, X. Motion-compensated frame interpolation with multiframe-based occlusion handling. J. Disp. Technol. 2016, 12, 45–54. [Google Scholar] [CrossRef]
- Kaviani, H.R.; Shirani, S. Frame rate up-conversion using optical flow and patch-based reconstruction. IEEE Trans. Circuits Syst. Video Technol. 2016, 26, 1581–1594. [Google Scholar] [CrossRef]
- Dar, Y.; Bruckstein, A.M. Motion-compensated coding and frame rate up-conversion: Models and analysis. IEEE Trans. Image Process. 2015, 24, 2051–2066. [Google Scholar] [CrossRef] [PubMed]
- Xia, M.; Yang, G.; Li, L.; Li, R.; Sun, X. Detecting video frame rate up-conversion based on frame-level analysis of average texture variation. Multimedia Tools Appl. 2017, 76, 1–23. [Google Scholar] [CrossRef]
- Guo, D.; Lu, Z. Motion-compensated frame interpolation with weighted motion estimation and hierarchical vector refinement. Neurocomputing 2016, 181, 76–85. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, F.; Chien, S. Algorithm and architecture design of multi-rate frame rate up-conversion for ultra-HD LCD systems. IEEE Trans. Circuits Syst. Video Technol. 2016, 27, 2739–2752. [Google Scholar] [CrossRef]
- Pan, Z.; Lei, J.; Zhang, Y.; Sun, X.; Kwong, S. Fast motion estimation based on content property for low-complexity H.265/HEVC encoder. IEEE Trans. Broadcast. 2016, 62, 675–684. [Google Scholar] [CrossRef]
- Lin, Y.C.; Tai, S.C. Fast full-search block-matching algorithm for motion-compensated video compression. IEEE Trans. Commun. 2002, 45, 527–531. [Google Scholar]
- Dikbas, S.; Altunbasak, Y. Novel true-motion estimation algorithm and its application to motion-compensated temporal frame interpolation. IEEE Trans. Image Process. 2013, 22, 2931–2945. [Google Scholar] [CrossRef]
- Haan, G.D.; Biezen, P.W.A.C.; Huijgen, H.; Ojo, O.A. True motion estimation with 3-D recursive search block matching. IEEE Trans. Circuits Syst. Video Technol. 1993, 3, 368–379. [Google Scholar] [CrossRef]
- Kim, D.Y.; Lim, H.; Park, H.W. Iterative true motion estimation for motion-compensated frame interpolation. IEEE Trans. Circuits Syst. Video Technol. 2013, 23, 445–454. [Google Scholar] [CrossRef]
- Alparone, L.; Bartolini, M.B.F.; Cappellini, V. Adaptively weighted vector-median filters for motion fields smoothing. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Atlanta, GA, USA, 9 May 1996; pp. 2267–2270. [Google Scholar]
- Choi, B.-T.; Lee, S.-H.; Ko, S.-J. New frame rate up-conversion using bi-directional motion estimation. IEEE Trans. Consum. Electron. 2000, 46, 603–609. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, D.; Liu, H.; Li, Y.; Ma, S.; Gao, W. Side information generation with auto regressive model for low-delay distributed video coding. J. Vis. Commun. Image Represent. 2012, 23, 229–236. [Google Scholar] [CrossRef]
- Jeon, B.-W.; Lee, G.-I.; Lee, S.-H.; Park, R.-H. Coarse-to-fine frame interpolation for frame rate up-conversion using pyramid structure. IEEE Trans. Consum. Electron. 2003, 49, 499–508. [Google Scholar] [CrossRef]
- Choi, B.D.; Han, J.W.; Kim, C.S.; Ko, S.J. Motion-compensated frame interpolation using bilateral motion estimation and adaptive overlapped block motion compensation. IEEE Trans. Circuits Syst. Video Technol. 2007, 17, 407–416. [Google Scholar] [CrossRef]
- Orchard, M.T.; Sullivan, G.J. Overlapped block motion compensation: An estimation-theoretic approach. IEEE Trans. Image Process. 1994, 3, 693–699. [Google Scholar] [CrossRef]
- Giusto, D.D.; Murroni, M.; Soro, G. Slow motion replay of video sequences using fractal zooming. IEEE Trans. Consum. Electron. 2005, 51, 103–111. [Google Scholar] [CrossRef]
- Li, R.; Liu, H.; Liu, Z.; Li, Y.; Fu, Z. Motion-compensated frame interpolation using patch-based sparseland model. Signal Process. Image Commun. 2017, 54, 36–48. [Google Scholar] [CrossRef]
- Tsai, T.H.; Shi, A.T.; Huang, K.T. Accurate frame rate up-conversion for advanced visual quality. IEEE Trans. Broadcast. 2016, 62, 426–435. [Google Scholar] [CrossRef]
- Li, R.; Lv, Y.; Liu, Z. Multi-scheme frame rate up-conversion using space-time saliency. IEEE Access 2018, 6, 1905–1915. [Google Scholar] [CrossRef]
- Kang, S.J.; Cho, K.R.; Kim, Y.H. Motion compensated frame rate up-conversion using extended bilateral motion estimation. IEEE Trans. Consum. Electron. 2007, 53, 1759–1767. [Google Scholar] [CrossRef]
- Gao, X.; Duanmu, C.J.; Zou, C. A multilevel successive elimination algorithm for block matching motion estimation. IEEE Trans. Image Process. 2000, 9, 501–504. [Google Scholar] [CrossRef] [PubMed]
- Kang, S.J.; Yoo, S.; Kim, Y.H. Dual motion estimation for frame rate up-conversion. IEEE Trans. Circuits Syst. Video Technol. 2010, 20, 1909–1914. [Google Scholar] [CrossRef]
- Yoo, D.G.; Kang, S.J.; Kim, Y.H. Direction-Select Motion Estimation for Motion-Compensated Frame Rate Up-Conversion. J. Disp. Technol. 2013, 9, 840–850. [Google Scholar]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sequence | Dual-ME | DS-ME | Proposed | ||
|---|---|---|---|---|---|
| PSNR(dB) | Δ (dB) | PSNR(dB) | Δ (dB) | PSNR(dB) | |
| Bus | 25.02 | −1.59 | 23.4 | −3.21 | 26.61 |
| City | 31.94 | −1.64 | 33.43 | −0.15 | 33.58 |
| Football | 22.78 | 0.01 | 22.43 | −0.34 | 22.77 |
| Foreman | 32.37 | −2.56 | 35.17 | 0.24 | 34.93 |
| Flower | 28.75 | −2.72 | 32.14 | 0.67 | 31.47 |
| Mobile | 25.33 | −2.36 | 27.54 | −0.15 | 27.69 |
| Mother | 40.81 | −1.68 | 43.04 | 0.55 | 42.49 |
| Soccer | 25.96 | −2.39 | 28.68 | 0.33 | 28.35 |
| Stefan | 27.03 | −1.53 | 27.55 | −1.01 | 28.56 |
| Sequence | Dual-ME | DS-ME | Proposed | ||
|---|---|---|---|---|---|
| SSIM | Δ | SSIM | Δ | SSIM | |
| Bus | 0.8332 | −0.0765 | 0.7771 | −0.1326 | 0.9117 |
| City | 0.8645 | −0.0706 | 0.933 | −0.0021 | 0.9403 |
| Football | 0.5532 | −0.0916 | 0.6271 | −0.0177 | 0.6426 |
| Foreman | 0.9107 | −0.0399 | 0.9519 | 0.0013 | 0.9587 |
| Flower | 0.9446 | −0.0329 | 0.9795 | 0.0020 | 0.9843 |
| Mobile | 0.8633 | −0.0812 | 0.9522 | 0.0077 | 0.9412 |
| Mother | 0.9617 | −0.0177 | 0.9802 | 0.0008 | 0.9809 |
| Soccer | 0.8661 | −0.0442 | 0.8988 | −0.0115 | 0.9145 |
| Stefan | 0.8333 | −0.0627 | 0.8449 | −0.0511 | 0.9005 |
| Sequence | Dual-ME | DS-ME | Proposed |
|---|---|---|---|
| Bus | 5.8 | 6.76 | 4.63 |
| City | 5.7 | 6.78 | 4.62 |
| Football | 6.1 | 6.79 | 4.35 |
| Foreman | 5.2 | 6.80 | 3.88 |
| Flower | 5.6 | 6.76 | 4.20 |
| Mobile | 5.5 | 6.80 | 4.39 |
| Mother | 5.0 | 6.80 | 3.97 |
| Soccer | 5.6 | 6.75 | 4.63 |
| Stefan | 5.5 | 6.78 | 4.44 |
| Sequence | Ref. [19] | Ref. [20] | Ref. [21] | Proposed | ||||
|---|---|---|---|---|---|---|---|---|
| PSNR | SSIM | PSNR | SSIM | PSNR | SSIM | PSNR | SSIM | |
| Football | 23.41 | 0.7280 | 24.90 | 0.6820 | 23.26 | 0.6937 | 22.77 | 0.6426 |
| Foreman | 35.02 | 0.9551 | 37.20 | 0.9600 | 34.70 | 0.9494 | 34.93 | 0.9587 |
| Flower | - | - | 30.56 | 0.9689 | 31.76 | 0.9773 | 31.47 | 0.9843 |
| Mother | 46.77 | 0.9800 | 42.84 | 0.9808 | 42.65 | 0.9791 | 42.49 | 0.9809 |
| Stefan | 29.22 | 0.9830 | 29.37 | 0.9395 | 29.26 | 0.9358 | 28.56 | 0.9005 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Ma, W.; Han, Y. A Spatial Prediction-Based Motion-Compensated Frame Rate Up-Conversion. Future Internet 2019, 11, 26. https://doi.org/10.3390/fi11020026
Li Y, Ma W, Han Y. A Spatial Prediction-Based Motion-Compensated Frame Rate Up-Conversion. Future Internet. 2019; 11(2):26. https://doi.org/10.3390/fi11020026
Chicago/Turabian StyleLi, Yanli, Wendan Ma, and Yue Han. 2019. "A Spatial Prediction-Based Motion-Compensated Frame Rate Up-Conversion" Future Internet 11, no. 2: 26. https://doi.org/10.3390/fi11020026
APA StyleLi, Y., Ma, W., & Han, Y. (2019). A Spatial Prediction-Based Motion-Compensated Frame Rate Up-Conversion. Future Internet, 11(2), 26. https://doi.org/10.3390/fi11020026