Reframing HRI Design Opportunities for Social Robots: Lessons Learnt from a Service Robotics Case Study Approach Using UX for HRI

Abstract
1. Introduction
2. Background and Related Works
2.1. The Added Value of UX of HCI towards HRI for Social Robotics (SR)
2.2. Service Design for Human–Robot Interaction
2.3. Social Robots’ Setting Applications: Public Environment
- Robovie approached all the participants without distinction or preliminary estimation in the field test.
- It then waited for the participants to start the interaction.
- Finally, it decided autonomously whether or not to approach the user based on the intention estimation of the interaction with the participants.
- Gaze only,
- Precise pointing,
- Casual pointing.
2.4. Social Robots and the Telepresence Scenario
- Motion system,
- Connection system,
- Video conference system,
- Sensors.
2.4.1. Telepresence Robot Commercial Applications
2.5. Navigation Challenges in a Physical Space, Ethics and Privacy Related to Telepresence
3. Methodology
3.1. Define the Challenges and Observations
- Identifying viable applications for social robots,
- Determining how to create a positive user experience in a specific environment that could be replicable in other contexts.
- How do you perceive the current visiting experience?
- What would you like to change about the location/experience?
- How do you rate a good experience as a visitor/staff member?
3.2. Preliminary Requirements
- The robot should be a companion, and perform simple tasks that anyone can address and understand since the age range in between the employees spans from 29 y/o to 65 y/o, and perhaps there could be some difficulties in the use of novel technologies
- The most time-consuming task during the day is to go up and down the floors of the company building in order to gather guests for the meetings coming from other sub-offices or from other towns
- The blueprint of the building itself is very intricate, and even with many directions given in advance, there’s a high chance to get lost or to spend more time in wayfinding
- Some robots have already been tested before in the same building, but, after the first few days, employees lost their interest due to the lack of novelty and an interface that is not very user-friendly
- The previous tested robot was a humanoid, a Nao, and people resulted in having high expectations in its abilities or, on the contrary, they simply perceived it as an expensive toy
4. Designing the Service and the Robot
- Usability,
- Usefulness,
- Flexibility,
- Likeability,
- Utility.
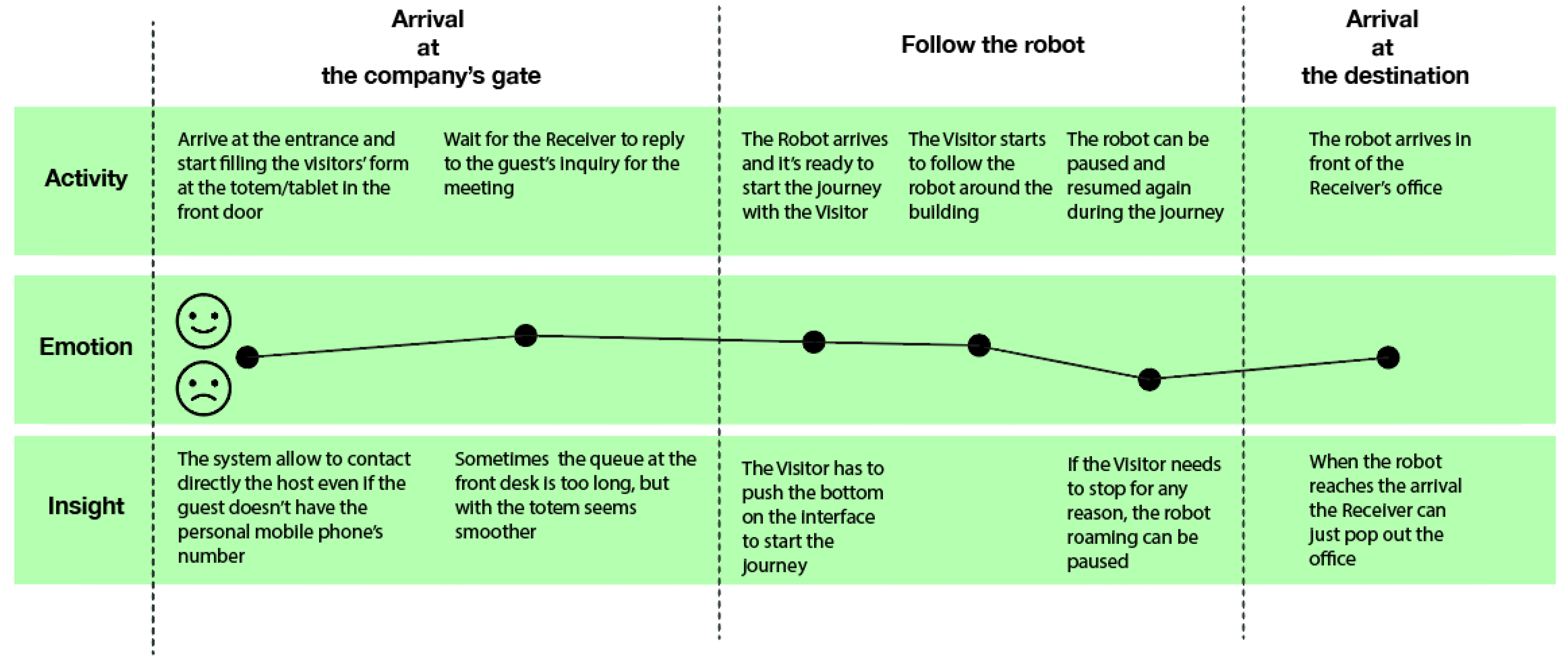
4.1. Designing the Service
4.2. Acceptance and the Limits of Anthropomorphism
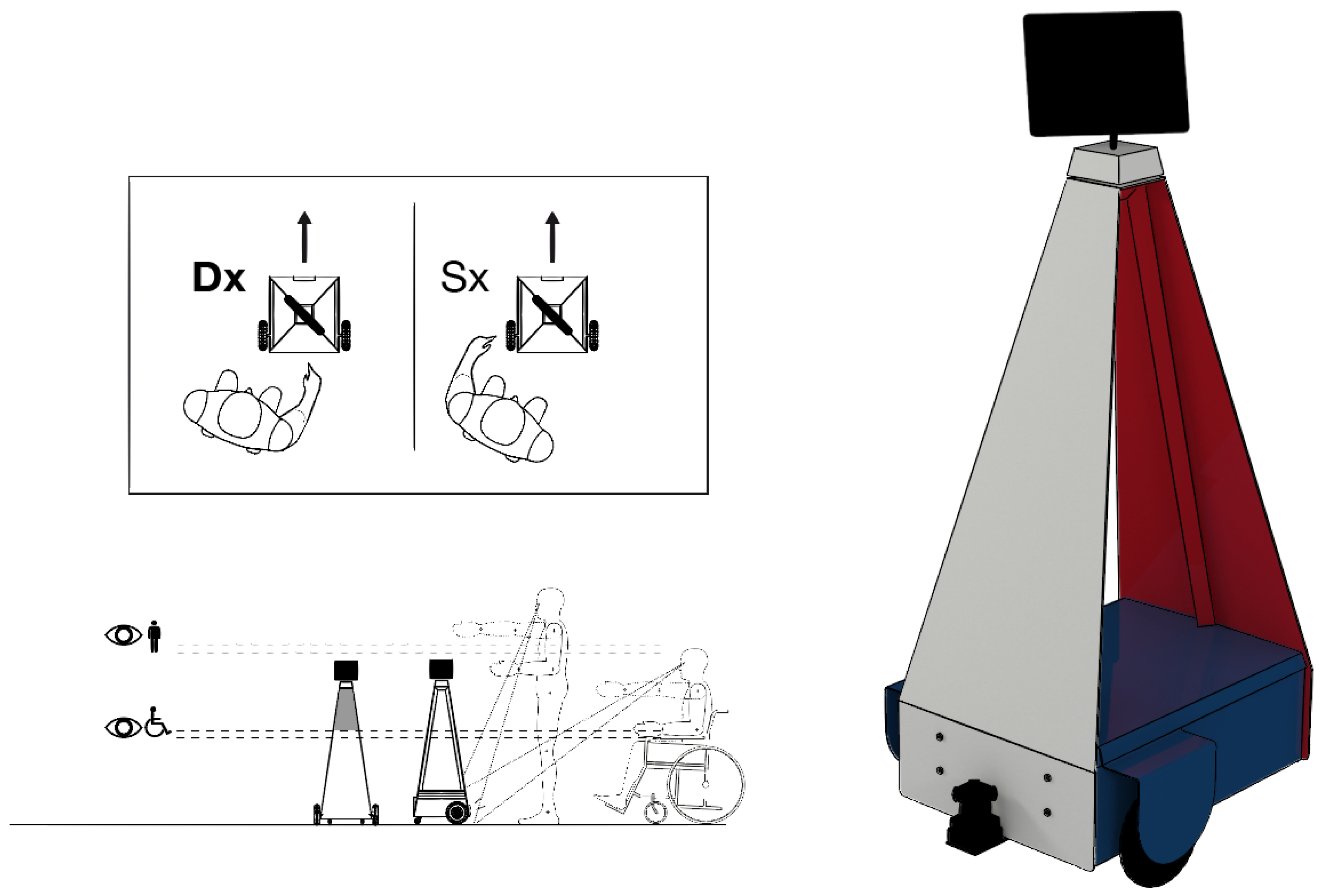
4.3. Designing the Robot Courier
The Limits of Anthropomorphism and Adaptation to Context of Use
4.4. Ergonomic Considerations and Functionalities
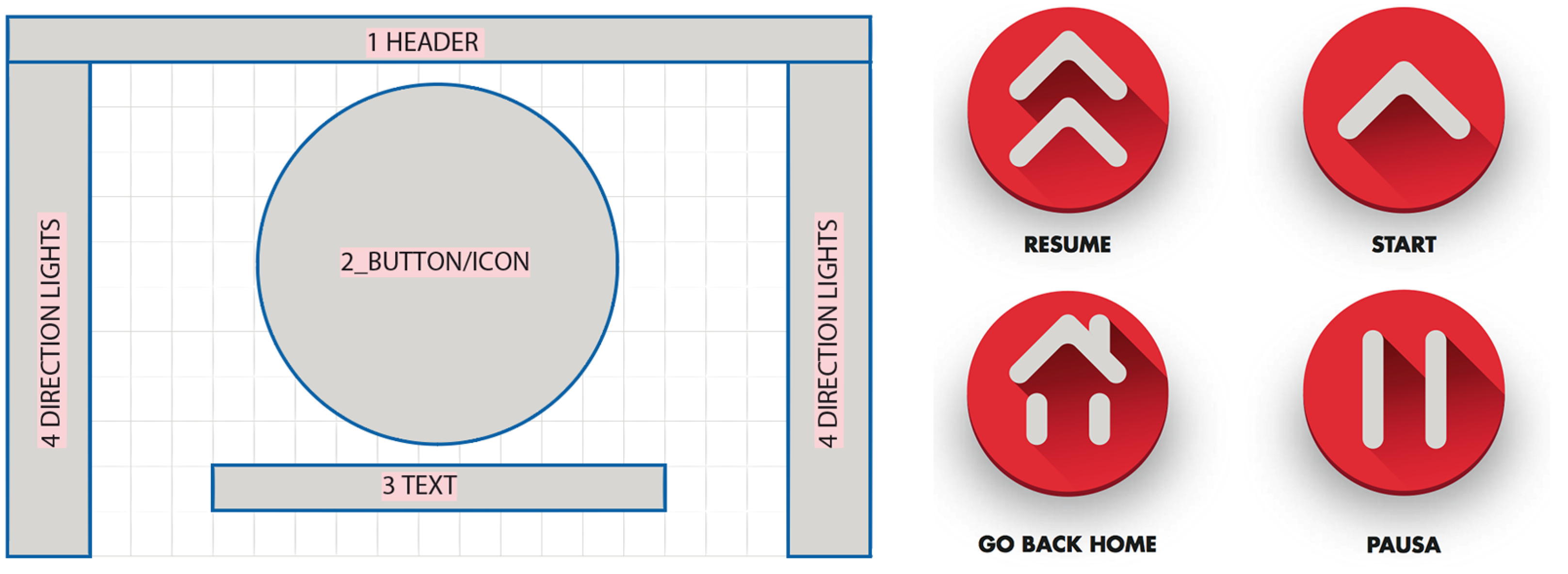
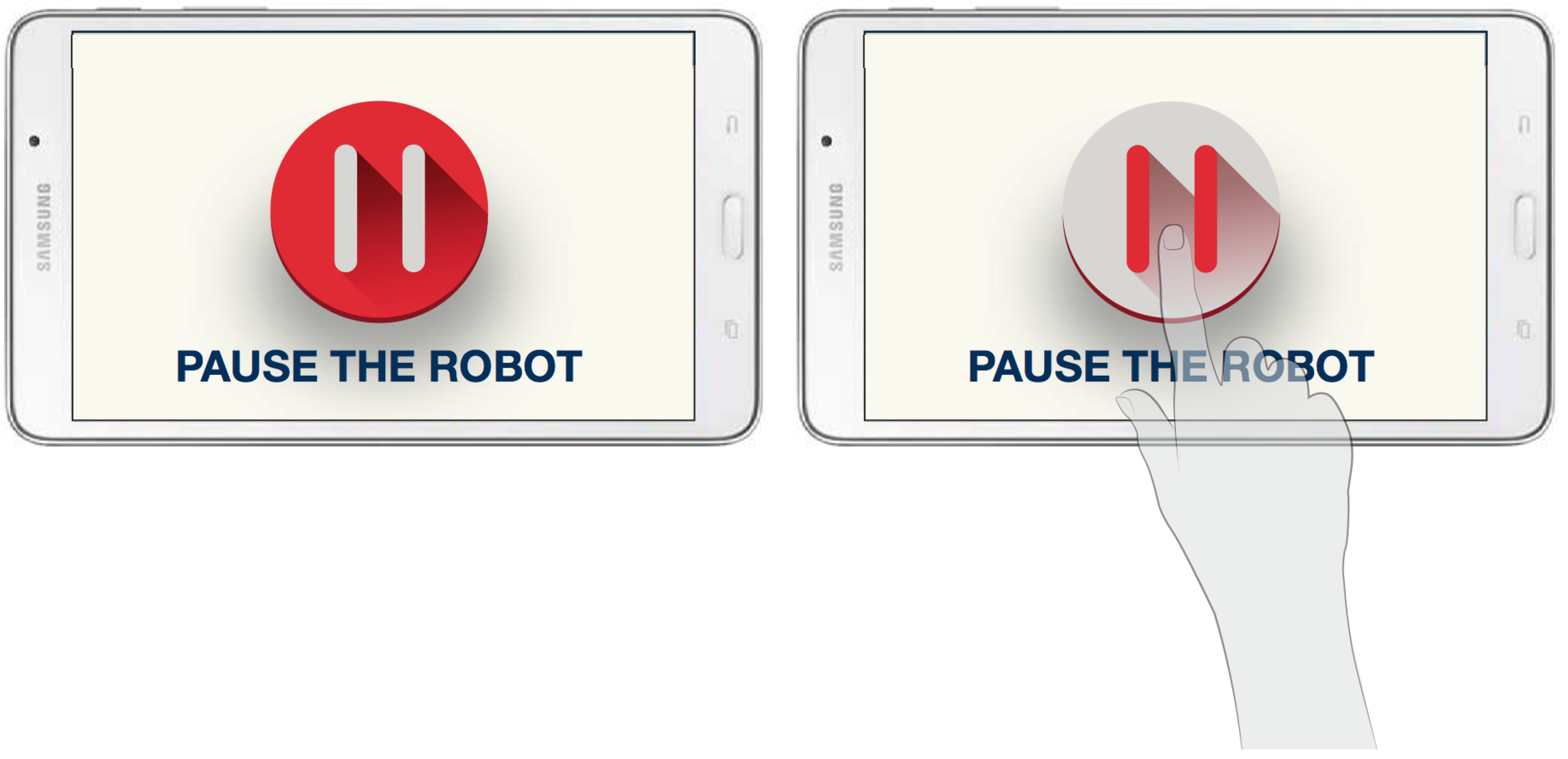
4.5. User Interface and GUI
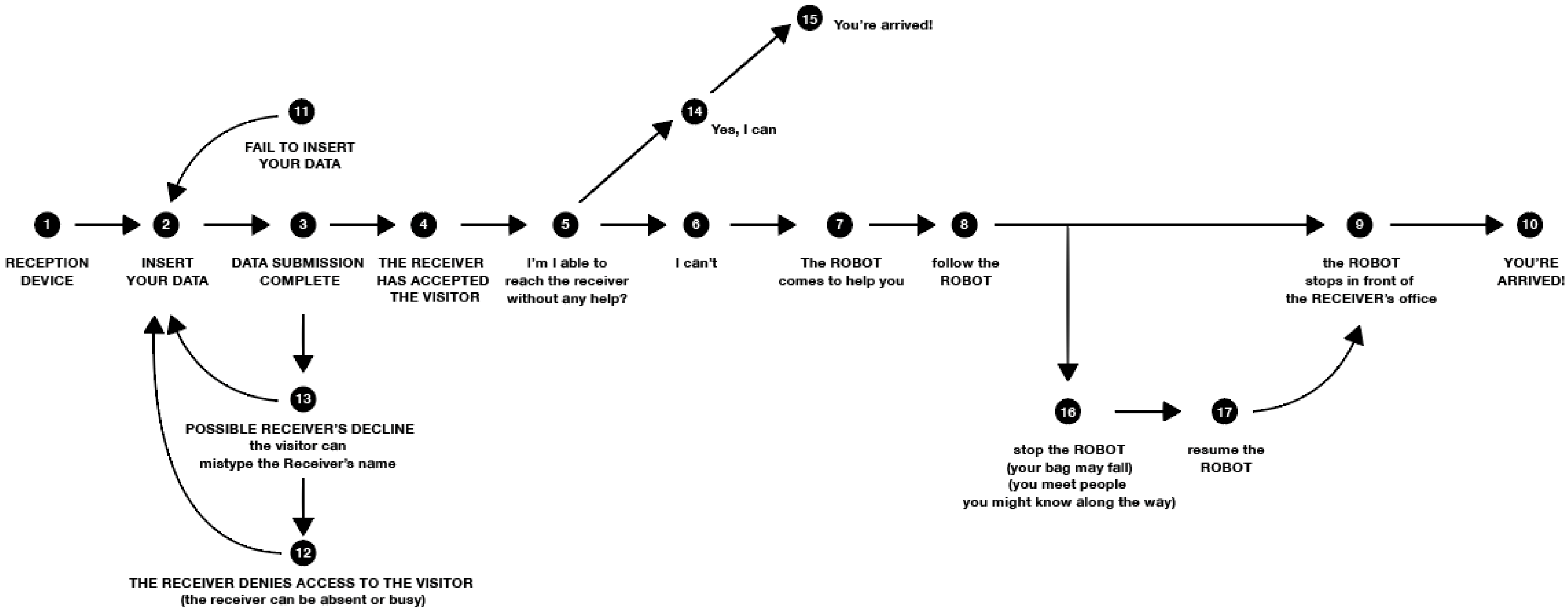
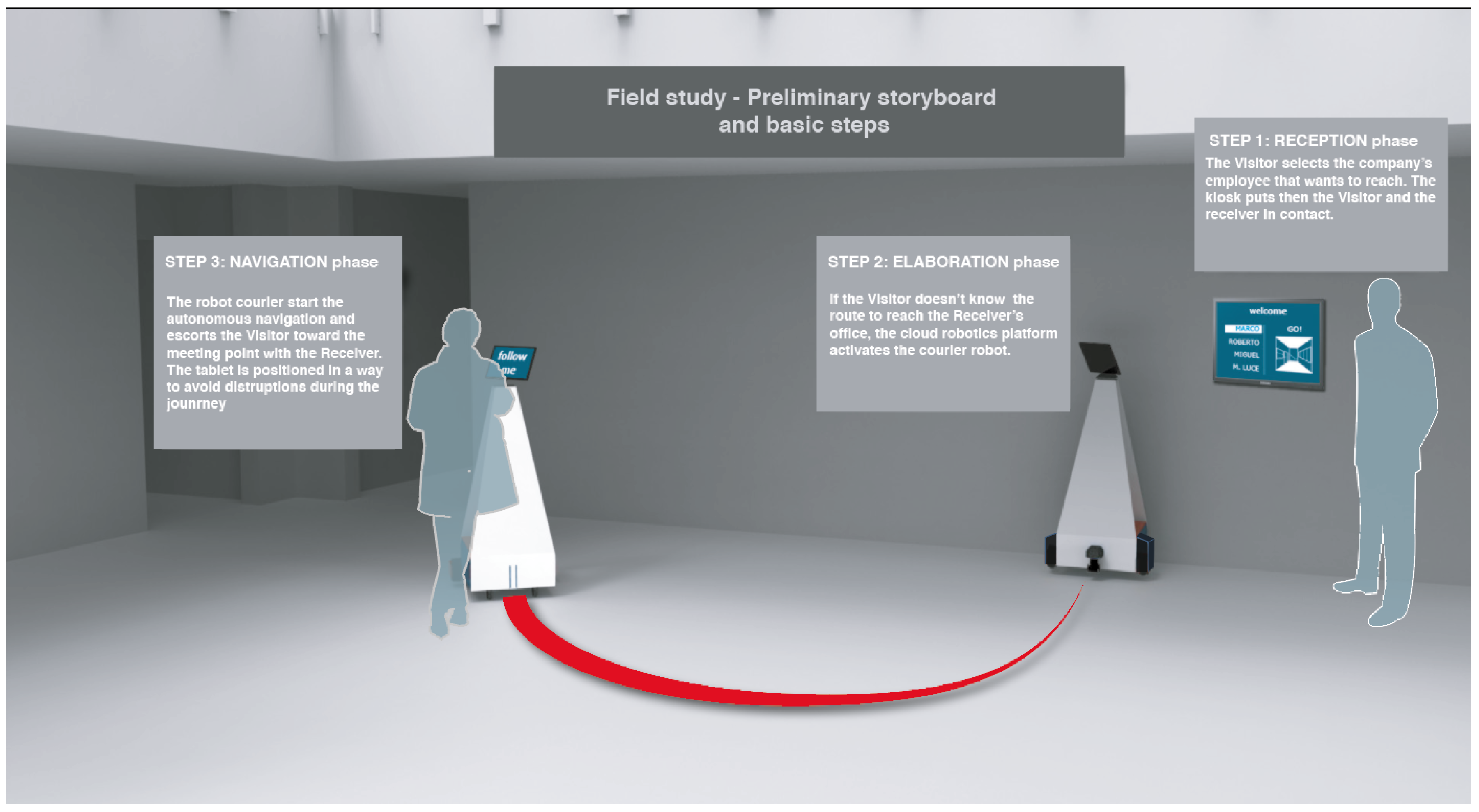
4.6. Supplementary Material Test—Field Study Description
- Step 1—Reception phase,
- Step 2—Elaboration phase,
- Step 3—Navigation phase.
5. Evaluation
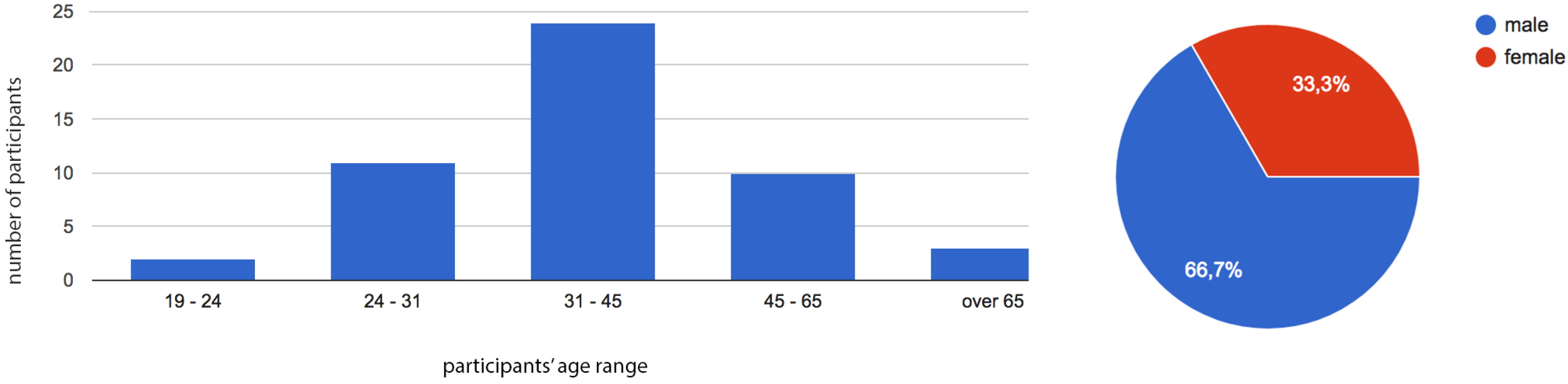
Qualitative Analysis of Participant Responses to the Questionnaires
6. Findings and Results
7. Discussion
7.1. Robot Courier Implications
- The powerful role that the robot’s movements and responsiveness could in general have a positive influence on participants’ perception of the robot,
- That a simplified user interface can play a key role in enhancing the positive attitude towardss a non-anthropomorphic robot.
7.2. Ethics Considerations, Stakeholders and Privacy
8. Conclusions and Future Works
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| HCI | Human–Computer Interaction |
| HRI | Human–Robot Interaction |
| UX | User Experience |
| WoZ | Wizard of Oz |
References
- Wells, M.; Thelen, L. What Does Your Workspace Say about You?: The Influence of Personality, Status, and Workspace on Personalization. Environ. Behav. 2002, 34, 300–321. [Google Scholar] [CrossRef]
- Hoffman, G.; Breazeal, C. Effects of anticipatory action on human–robot teamwork efficiency, fluency, and perception of team. In Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction, Washington, DC, USA, 9–11 March 2007; pp. 1–8. [Google Scholar]
- Tonkin, M.; Vitale, J.; Herse, S.; Williams, M.-A.; Judge, W.; Wang, X. Design Methodology for the UX of HRI: A Field Study of a Commercial Social Robot at an Airport; ACM Press: New York, NY, USA, 2018; pp. 407–415. [Google Scholar]
- Goodrich, M.A.; Olsen, D.R. Seven principles of efficient human robot interaction. In Proceedings of the 2003 IEEE International Conference on Systems, Man and Cybernetics, Washington, DC, USA, 8 October 2003; Volume 4, pp. 3942–3948. [Google Scholar]
- Vischer, J.C. Towards an Environmental Psychology of Workspace: How People are Affected by Environments for Work. Archit. Sci. Rev. 2008, 51, 97–108. [Google Scholar] [CrossRef]
- Vischer, J.C. Space Meets Status Designing Workplace Performance; Routledge: London, UK, 2005; ISBN 978-0-203-08777-0. [Google Scholar]
- Marder-Eppstein, E.; Berger, E.; Foote, T.; Gerkey, B.; Konolige, K. The Office Marathon: Robust navigation in an indoor office environment. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 300–307. [Google Scholar]
- Rosenthal-vonderPütten, A.M.; Krämer, N.C.; Hoffmann, L.; Sobieraj, S.; Eimler, S.C. An Experimental Study on Emotional Reactions Towards a Robot. Int. J. Soc. Robot. 2013, 5, 17–34. [Google Scholar] [CrossRef]
- Alavinia, S.M.; Molenaar, D.; Burdorf, A. Productivity loss in the workforce: Associations with health, work demands, and individual characteristics. Am. J. Ind. Med. 2009, 52, 49–56. [Google Scholar] [CrossRef] [PubMed]
- Joosse, M.; Lohse, M.; Evers, V. Short Duration Robot Interaction at an Airport: Challenges from a Socio-Psychological Point of View. In Proceedings of the 5th International Conference on Social Robotics, Bristol, UK, 27–29 October 2013. [Google Scholar]
- Triebel, R.; Arras, K.; Alami, R.; Beyer, L.; Breuers, S.; Chatila, R.; Chetouani, M.; Cremers, D.; Evers, V.; Fiore, M.; et al. SPENCER: A Socially Aware Service Robot for Passenger Guidance and Help in Busy Airports. In Field and Service Robotics; Wettergreen, D.S., Barfoot, T.D., Eds.; Springer International Publishing: Cham, Switzerland, 2016; Volume 113, pp. 607–622. ISBN 978-3-319-27700-4. [Google Scholar]
- Alenljung, B.; Andreasson, R.; Billing, E.A.; Lindblom, J.; Lowe, R. User experience of conveying emotions by touch. In Proceedings of the 2017 26th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Lisbon, Portugal, 28 August–1 September 2017; pp. 1240–1247. [Google Scholar]
- Hartson, R.; Pyla, P.S. The UX Book: Process and Guidelines for Ensuring a Quality User Experience; Elsevier and Morgan Kaufmann: Amsterdam, The Netherlands, 2012; ISBN 978-0-12-385241-0. [Google Scholar]
- Goodrich, M.A.; Schultz, A.C. Human-Robot Interaction: A Survey. Foundations and Trends. Hum. Comput. Interact. 2007, 1, 203–275. [Google Scholar] [CrossRef]
- Lindblom, J.; Andreasson, R. Current Challenges for UX Evaluation of Human-Robot Interaction. In Advances in Ergonomics of Manufacturing: Managing the Enterprise of the Future; Schlick, C., Trzcieliński, S., Eds.; Springer International Publishing: Cham, Switzerland, 2016; Volume 490, pp. 267–277. ISBN 978-3-319-41696-0. [Google Scholar]
- Lee, M.K.; Forlizzi, J. Designing adaptive robotic services. In Proceedings of the International Association of Societies of Design Research 2009, Seoul, Korea, 18–22 October 2009. [Google Scholar]
- Weiss, A.; Bernhaupt, R.; Lankes, M.; Tscheligi, M. The USUS evaluation framework for human–robot interaction. In Proceedings of the AISB2009, Symposium on New Frontiers in Human-Robot Interaction, Edinburgh, UK, 6–9 April 2009; Volume 4, pp. 11–26. [Google Scholar]
- Luber, M.; Arras, K. Multi-Hypothesis Social Grouping and Tracking for Mobile Robots. In Proceedings of the Robotics: Science and Systems 2013, Berlin, Germany, 24–28 June 2013. [Google Scholar]
- Baxter, P.; Kennedy, J.; Senft, E.; Lemaignan, S.; Belpaeme, T. From characterising three years of HRI to methodology and reporting recommendations. In Proceedings of the 2016 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Christchurch, New Zealand, 7–10 March 2016; pp. 391–398. [Google Scholar]
- Dautenhahn, K. Socially intelligent robots: Dimensions of human–robot interaction. Philos. Trans. R. Soc. B Biol. Sci. 2007, 362, 679–704. [Google Scholar] [CrossRef] [PubMed]
- Lee, M.K.; Kiesler, S.; Forlizzi, J. Mining Behavioral Economics to Design Persuasive Technology for Healthy Choices; ACM Press: New York, NY, USA, 2011; p. 325. [Google Scholar]
- Ahmad, M.; Mubin, O.; Orlando, J. A Systematic Review of Adaptivity in Human-Robot Interaction. Multimodal Technol. Interact. 2017, 1, 14. [Google Scholar] [CrossRef]
- Leite, I.; Martinho, C.; Paiva, A. Social robots for long-term interaction: A survey. Int. J. Soc. Robot. 2013, 5, 291–308. [Google Scholar] [CrossRef]
- Tapus, A.; Mataric, M.J.; Scassellati, B. Socially assistive robotics [grand challenges of robotics]. IEEE Robot. Autom. Mag. 2007, 14, 35–42. [Google Scholar] [CrossRef]
- Macbeth, S.W.; Fernandez, R.L.; Meyers, B.R.; Tan, D.S.; Robertson, G.G.; Oliver, N.M.; Murillo, O.E.; Pedersen, E.R.; Czerwinski, M.P.; Pinckney, M.D.; et al. Activity-Centric Adaptive User Interface. U.S. Patent App. 11/426,804, 27 June 2006. [Google Scholar]
- Bartneck, C.; Kulić, D.; Croft, E.; Zoghbi, S. Measurement Instruments for the Anthropomorphism, Animacy, Likeability, Perceived Intelligence, and Perceived Safety of Robots. Int. J. Soc. Robot. 2009, 1, 71–81. [Google Scholar] [CrossRef]
- Walters, M.L.; Syrdal, D.S.; Dautenhahn, K.; teBoekhorst, R.; Koay, K.L. Avoiding the uncanny valley: Robot appearance, personality and consistency of behavior in an attention-seeking home scenario for a robot companion. Auton. Robot. 2008, 24, 159–178. [Google Scholar] [CrossRef]
- Hassenzahl, M.; Tractinsky, N. User experience—A research agenda. Behav. Inf. Technol. 2006, 25, 91–97. [Google Scholar] [CrossRef]
- Liu, J.; Wong, C.K.; Hui, K.K. An adaptive user interface based on personalized learning. IEEE Intell. Syst. 2003, 18, 52–57. [Google Scholar]
- Sabanovic, S.; Reeder, S.; Kechavarzi, B. Designing Robots in the Wild: In situ Prototype Evaluation for a Break Management Robot. J. Hum. Robot Interact. 2014, 3, 70. [Google Scholar] [CrossRef]
- Lee, H.R.; Šabanović, S.; Chang, W.-L.; Nagata, S.; Piatt, J.; Bennett, C.; Hakken, D. Steps Toward Participatory Design of Social Robots: Mutual Learning with Older Adults with Depression; ACM Press: New York, NY, USA, 2017; pp. 244–253. [Google Scholar]
- Weiss, A.; Bernhaupt, R.; Tscheligi, M.; Yoshida, E. Addressing User Experience and Societal Impact in a User Study with a Humanoid Robot. In Proceedings of the Symposium on New Frontiers in Human-Robot Interaction, Edinburgh, Scotland, 8–9 April 2009. [Google Scholar]
- De Graaf, M.M.A.; Ben Allouch, S. Exploring influencing variables for the acceptance of social robots. Robot. Auton. Syst. 2013, 61, 1476–1486. [Google Scholar] [CrossRef]
- Niemelä, R.; Rautio, S.; Hannula, M.; Reijula, K. Work environment effects on labor productivity: An intervention study in a storage building: Work Environment and Labor Productivity. Am. J. Ind. Med. 2002, 42, 328–335. [Google Scholar] [CrossRef] [PubMed]
- Shiomi, M.; Shinozawa, K.; Nakagawa, Y.; Miyashita, T.; Sakamoto, T.; Terakubo, T.; Ishiguro, H.; Hagita, N. Recommendation effects of a social robot for advertisement-use context in a shopping mall. Int. J. Soc. Robot. 2013, 5, 251–262. [Google Scholar] [CrossRef]
- Kanda, T.; Shiomi, M.; Miyashita, Z.; Ishiguro, H.; Hagita, N. A communication robot in a shopping mall. IEEE Trans. Robot. 2010, 26, 897–913. [Google Scholar] [CrossRef]
- Satake, S.; Kanda, T.; Glas, D.F.; Imai, M.; Ishiguro, H.; Hagita, N. How to Approach Humans?—Strategies for Social Robots to Initiate Interaction. In Proceedings of the 2009 4th ACM/IEEE International Conference on Human-Robot Interaction (HRI), La Jolla, CA, USA, 11–13 March 2009. [Google Scholar]
- Kanda, T.; Shiomi, M.; Miyashita, Z.; Ishiguro, H.; Hagita, N. An affective guide robot in a shopping mall. In Proceedings of the 4th ACM/IEEE International Conference on Human-Robot Interaction (HRI), San Diego, CA, USA, 9–13 March 2009; pp. 173–180. [Google Scholar]
- Svenstrup, M.; Bak, T.; Maler, O.; Andersen, H.J.; Jensen, O.B. Pilot study of person robot interaction in a public transit space. In Proceedings of the International Conference on Research and Education in Robotics, Heidelberg, Germany, 22–24 May 2008; pp. 96–106. [Google Scholar]
- Kato, Y.; Kanda, T.; Ishiguro, H. May I help you?: Design of human-like polite approaching behavior. In Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction (ACM 2015), Portland, OR, USA, 2–5 March 2015; pp. 35–42. [Google Scholar]
- Liu, N.; Woon, W.L.; Aung, Z.; Afshari, A. Handling class imbalance in customer behavior prediction. In Proceedings of the 2014 International Conference on Collaboration Technologies and Systems (CTS), Minneapolis, MN, USA, 19–23 May 2014; pp. 100–103. [Google Scholar]
- Gockley, R.; Bruce, A.; Forlizzi, J.; Michalowski, M.; Mundell, A.; Rosenthal, S.; Sellner, B.; Simmons, R.; Snipes, K.; Schultz, A.C.; et al. Designing robots for long-term social interaction. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 1338–1343. [Google Scholar]
- Endsley, M.R. Level of automation effects on performance, situation awareness and workload in a dynamic control task. Ergonomics 1999, 42, 462–492. [Google Scholar] [CrossRef] [PubMed]
- Correa, D.S.O.; Sciotti, D.F.; Prado, M.G.; Sales, D.O.; Wolf, D.F.; Osorio, F.S. Mobile Robots Navigation in Indoor Environments Using Kinect Sensor. In Proceedings of the 2012 Second Brazilian Conference on Critical Embedded Systems, Campinas, Brazil, 20–25 May 2012; pp. 36–41. [Google Scholar]
- Tsetsos, V.; Anagnostopoulos, C.; Kikiras, P.; Hadjiefthymiades, S. Semantically enriched navigation for indoor environments. Int. J. Web Grid Serv. 2006, 2, 453–478. [Google Scholar] [CrossRef]
- Designing Telepresence Robot Systems for Use by People with Special Needs. Available online: http://robotics.cs.uml.edu/fileadmin/content/publications/2011/2011-06-qolt-ktsui-anorton-dbrooks-hyanco-dkontak.pdf (accessed on 8 October 2018).
- Guizzo, E. When My Avatar Went to Work. IEEE Spectr. 2010, 47, 26–50. [Google Scholar] [CrossRef]
- Michaud, F.; Boissy, P.; Labonte, D.; Corriveau, H.; Grant, A.; Lauria, M.; Cloutier, R.; Roux, M.-A.; Iannuzzi, D.; Royer, M.-P. Telepresence robot for home care assistance. In Proceedings of the AAAI Spring Symposium: Multidisciplinary Collaboration for Socially Assistive Robotics, Standford, CA, USA, 26–28 March 2007; pp. 50–55. [Google Scholar]
- Lu, J.-M.; Hsu, Y.-L. Telepresence Robots for Medical and Homecare Applications. In Contemporary Issues in Systems Science and Engineering; Zhou, M., Li, H.-X., Weijnen, M., Eds.; John Wiley and Sons, Inc.: Hoboken, NJ, USA, 2015; pp. 725–735. ISBN 978-1-119-03682-1. [Google Scholar]
- Kwon, O.-H.; Koo, S.-Y.; Kim, Y.G.; Kwon, D.-S. Telepresence robot system for English tutoring. In Proceedings of the 2010 IEEE Workshop on Advanced Robotics and its Social Impacts, Seoul, Korea, 26–28 October 2010; pp. 152–155. [Google Scholar]
- Giraff Technologies AB. Available online: http://giraff.org (accessed on 8 October 2018).
- Anybots, It’s You Anywhere. Available online: http://www.anybots.com (accessed on 8 October 2018).
- VGo Communication. Available online: http://www.vgocom.com (accessed on 8 October 2018).
- Willow Garage. Texai Remote Presence System. Available online: http://www.willowgarage.com/pages/texai/overview (accessed on 8 October 2018).
- Double Robotics, Telepresence Robot for Telecommuters. Available online: https://www.doublerobotics.com/ (accessed on 8 October 2018).
- Research in Art and Design (Royal College of Art Research Papers, Vol 1, No 1, 1993/4). Available online: http://researchonline.rca.ac.uk/384/ (accessed on 8 October 2018).
- Lee, M.K.; Kiesler, S.; Forlizzi, J.; Rybski, P. Ripple effects of an embedded social agent: A field study of a social robot in the workplace. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems (ACM 2012), Austin, TX, USA, 5–10 May 2012; pp. 695–704. [Google Scholar]
- Dietsch, J. People Meeting Robots in the Workplace Industrial Activities. IEEE Robot. Autom. Mag. 2010, 17, 15–16. [Google Scholar] [CrossRef]
- Elara, M.R.; Rojas, N.; Chua, A. Design principles for robot inclusive spaces: A case study with Roomba. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 5593–5599. [Google Scholar]
- Shiomi, M.; Iio, T.; Kamei, K.; Sharma, C.; Hagita, N. Effectiveness of social behaviors for autonomous wheelchair robot to support elderly people in Japan. PLoS ONE 2015, 10, e0128031. [Google Scholar] [CrossRef] [PubMed]
- Lee, M.K.; Forlizzi, J.; Kiesler, S.; Rybski, P.; Antanitis, J.; Savetsila, S. Personalization in HRI: A Longitudinal Field Experiment; ACM Press: New York, NY, USA, 2012; pp. 319–326. [Google Scholar]
- Sakamoto, D.; Kanda, T.; Ono, T.; Ishiguro, H.; Hagita, N. Android as a Telecommunication Medium with a Human-Like Presence; ACM Press: New York, NY, USA, 2007; p. 193. [Google Scholar]
- Fussell, S.R.; Kiesler, S.; Setlock, L.D.; Yew, V. How People Anthropomorphize Robots; ACM Press: New York, NY, USA, 2008; p. 145. [Google Scholar]
- Sumioka, H.; Minato, T.; Matsumoto, Y.; Salvini, P.; Ishiguro, H. Design of human likeness in HRI from uncanny valley to minimal design. In Proceedings of the 2013 8th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Tokyo, Japan, 3–6 March 2013; pp. 433–434. [Google Scholar]
- Şahin, E.; Çakmak, M.; Doğar, M.R.; Uğur, E.; Üçoluk, G. To Afford or Not to Afford: A New Formalization of Affordances Toward Affordance-Based Robot Control. Adapt. Behav. 2007, 15, 447–472. [Google Scholar] [CrossRef]
- Breazeal, C. Social Interactions in HRI: The Robot View. IEEE Trans. Syst. Man Cybern. Part C 2004, 34, 181–186. [Google Scholar] [CrossRef]
- Lohse, M.; van Berkel, N.; van Dijk, E.M.A.G.; Joosse, M.P.; Karreman, D.E.; Evers, V. The influence of approach speed and functional noise on users’ perception of a robot. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1670–1675. [Google Scholar]
- Walters, M.L.; Woods, S.; Koay, K.L.; Dautenhahn, K. Practical and methodological challenges in designing and conducting human-robot interaction studies. In Proceedings of the AISB 05 Symposium on Robot Companions, Hatfield, UK, 14–15 April 2005; pp. 1–143. [Google Scholar]
- Dang, T.H.H.; Tapus, A. Stress Game: The Role of Motivational Robotic Assistance in Reducing User’s Task Stress. Int. J. Soc. Robot. 2015, 7, 227–240. [Google Scholar] [CrossRef]
- Forlizzi, J.; Di Salvo, C. Service robots in the domestic environment: A study of the Roomba Vacuum in the home. In Proceedings of the 1st ACM SIGCHI/SIGART Conference on Human-Robot Interaction, Salt Lake City, UT, USA, 2–4 March 2006. [Google Scholar]
- Liu, P.; Glas, D.F.; Kanda, T.; Ishiguro, H.; Hagita, N. A Model for Generating Socially-Appropriate Deictic Behaviors Towards People. Int. J. Soc. Robot. 2017, 9, 33–49. [Google Scholar] [CrossRef]
- Ethics of Robotic Aesthetics. Available online: http://www.drhu.eu/publications/2015-DeSForM.pdf#page=167 (accessed on 8 October 2018).
- Salvini, P.; Laschi, C.; Dario, P. Design for Acceptability: Improving Robots’ Coexis-tence in Human Society. Int. J. Soc. Robot. 2010, 2, 451–460. [Google Scholar] [CrossRef]
- Sung, J.; Grinter, R.E.; Christensen, H.I. “Pimp My Roomba”: Designing for Personalization; ACM Press: New York, NY, USA, 2009; p. 193. [Google Scholar]
- Walsh, D.; Lin, L.C.; Dils, P.B. Context-Adaptive User Interface for a Portion of a Display Screen. U.S. Patent D678,898, 26 March 2013. [Google Scholar]
- Beer, J.; Fisk, A.D.; Rogers, W.A. Toward a framework for levels of robot autonomy in human–robot interaction. J. Hum. Robot Interact. 2014, 3, 74. [Google Scholar] [CrossRef] [PubMed]
- Heerink, M.; Krose, B.; Evers, V.; Wielinga, B. The influence of social presence on enjoyment and intention to use of a robot and screen agent by elderly users. In Proceedings of the 17th IEEE International Symposium on Robot and Human Interactive Communication, Technische Universität München, Munich, Germany, 1–3 August 2008; pp. 695–700. [Google Scholar]
- Google. Material Design principles. Available online: https://material.io/design/introduction/principles (accessed on 8 October 2018).
- Gwinner, K.P.; Gremler, D.D.; Bitner, M.J. Relational Benefits in Services Industries: The Customer’s Perspective. J. Acad. Market. Sci. 1998, 26, 101–114. [Google Scholar] [CrossRef]
- Mandryk, R.L.; Atkins, M.S.; Inkpen, K.M. A continuous and objective evaluation of emotional experience with interactive play environments. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 22–27 April 2006; pp. 1027–1036. [Google Scholar]
- Rousseau, V.; Ferland, F.; Létourneau, D.; Michaud, F. Sorry to interrupt, but may I have your attention? Preliminary design and evaluation of autonomous engagement in HRI. J. Hum. Robot Interact. 2013, 2, 41–61. [Google Scholar] [CrossRef]
- Lehmann, H.; Saez-Pons, J.; Syrdal, D.S.; Dautenhahn, K. In Good Company? Perception of Movement Synchrony of a Non-Anthropomorphic Robot. PLoS ONE 2015, 10, e0127747. [Google Scholar] [CrossRef] [PubMed]
- Lupetti, M.; Yao, Y.; Mi, H.; Germak, C. Design for Children’s Playful Learning with Robots. Future Internet 2017, 9, 52. [Google Scholar] [CrossRef]
- Kiesler, S.; Hinds, P. Introduction to this special issue on human–robot interaction. Hum. Comput. Interact. 2004, 19, 1–8. [Google Scholar]
- Scholtz, J. Theory and evaluation of human robot interactions. In Proceedings of the 36th Annual Hawaii International Conference on System Sciences, Big Island, HI, USA, 6–9 January 2003; p. 10. [Google Scholar]
- Khan, Z. Attitudes towardss Intelligent Service Robots; NADA KTH: Stockholm, Sweden, 1998; p. 17. [Google Scholar]
- Rogers, E.M. Diffusion of Innovation, 5th ed.; The Free Press: New York, NY, USA, 1995. [Google Scholar]
- Montgomery, C. Woody’s roundup and Wall- E’s wunderkammer. Technophilia and nostalgia in Pixar animation. Anim. Stud. 2011, 6, 7–13. [Google Scholar]
- Forsythe, S.; Kim, J.O.; Petee, T. Product cue usage in two Asian markets: A cross cultural comparison. Asia Pac. J. Manag. 1999, 16, 275–283. [Google Scholar] [CrossRef]
- Schermerhorn, P.; Scheutz, M.; Crowell, C.R. Robot social presence and gender: Do females view robots differently than males? In Proceedings of the 3rd ACM/IEEE International Conference on Human Robot Interaction, Amsterdam, The Netherlands, 12–15 March 2008; pp. 263–270. [Google Scholar]
- Kuo, I.H.; Rabindran, J.M.; Broadbent, E.; Lee, Y.I.; Kerse, N.; Stafford, R.M.Q. Age and gender factors in user acceptance of healthcare robots. In Proceedings of the 18th IEEE International Symposium on Robot and Human Interactive Communication, Toyama, Japan, 27 Septembet–2 October 2009; pp. 214–219. [Google Scholar]
- Fong, T.; Nourbakhsh, I.; Dautenhahn, K. A survey of socially interactive robots. Robot. Auton. Syst. 2003, 42, 143–166. [Google Scholar] [CrossRef]
- Asif, M.; Sabeel, M.; Mujeeb-ur Rahman, K.Z. Waiter robot-solution to restaurant automation. In Proceedings of the 1st student multi disciplinary research conference (MDSRC), At Wah, Pakistan, 14–15 November 2015. [Google Scholar]
- Baraka, K.; Veloso, M.M. Mobile Service Robot State Revealing Through Expressive Lights: Formalism, Design, and Evaluation. Int. J. Soc. Robot. 2018, 10, 65–92. [Google Scholar] [CrossRef]
- Aly, A.; Tapus, A. A model for synthesizing a combined verbal and nonverbal behavior based on personality traits in human–robot interaction. In Proceedings of the 8th ACM/IEEE International Conference on Human-Robot Interaction, Tokyo, Japan, 3–6 March 2013; IEEE Press: Piscataway, NJ, USA, 2013; pp. 325–332. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Robot | Study Design |
|---|---|---|
| Svenstrup et al., 2008 | FESTO | Participants: 48 adults No. of interactions: One-off interaction Type: Autonomous Measures: User experience Evaluation: Questionnaires and interviews |
| Kato et al., 2015 | Robovie | Participants: 26 visitors Conditions: Intention estimation algorithm vs. proactive vs. non-adaptive No. of Interactions: Field trail Interaction Type: Autonomous with WoZ controlled speech recognition Measures: Interaction intention success rate Evaluation: Video analysis |
| Liu et al., 2016 | Robovie | Participants: 33 adults No. of Interactions: One-off Interaction Type: WoZ controlled robot Measures: Naturalness, understandability, perceived politeness and overall quality of the robot’s deictic behaviours Evaluation: Questionnaire |
| Gockley et al., 2005 | Valerie/irobot | No. of interactions: On average 88 per day for 9 months Interaction type: Chat-bot storytelling Measures: Number of repetitive interactions, time of each interaction Evaluation: Log in data analysis |
| Tonkin et al., 2018 | PAL REEM robot | No. of interactions: 200 pieces of user feedback Interaction type: Autonomous Measures: Number of positive replies from the users, Evaluation: Manual observations, questionnaires |
| Attribute | Category | Av | SD |
|---|---|---|---|
| Anthropomorphism | Humanlike Non-Artificial Moving Elegantly | 2.32 3.31 3.17 | 0.75 0.9 0.79 |
| Animacy | Lively | 3.92 | 0.74 |
| Likeability | Friendliness Pleasantness Niceness | 4.33 4.25 4.27 | 0.75 0.70 0.74 |
| Perceived Intelligence | As Competent As Knowledgeable As Responsible | 4.00 4.00 3.85 | 0.68 0.62 0.68 |
| Safety perceived before the test | Anxious/Relaxed Calm/Agitated Quiescent/Surprised | 2.13 1.96 2.19 | 0.64 0.82 0.84 |
| Safety perceived after the test | Anxious/Relaxed Calm/Agitated Quiescent/Surprised | 4.42 4.42 4.31 | 0.50 0.54 0.51 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khan, S.; Germak, C. Reframing HRI Design Opportunities for Social Robots: Lessons Learnt from a Service Robotics Case Study Approach Using UX for HRI. Future Internet 2018, 10, 101. https://doi.org/10.3390/fi10100101
Khan S, Germak C. Reframing HRI Design Opportunities for Social Robots: Lessons Learnt from a Service Robotics Case Study Approach Using UX for HRI. Future Internet. 2018; 10(10):101. https://doi.org/10.3390/fi10100101
Chicago/Turabian StyleKhan, Sara, and Claudio Germak. 2018. "Reframing HRI Design Opportunities for Social Robots: Lessons Learnt from a Service Robotics Case Study Approach Using UX for HRI" Future Internet 10, no. 10: 101. https://doi.org/10.3390/fi10100101
APA StyleKhan, S., & Germak, C. (2018). Reframing HRI Design Opportunities for Social Robots: Lessons Learnt from a Service Robotics Case Study Approach Using UX for HRI. Future Internet, 10(10), 101. https://doi.org/10.3390/fi10100101