The Impact of Assumed Uncertainty on Long-Term Decisions in Forest Spatial Harvest Scheduling as a Part of Sustainable Development




Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Model Formulation
2.3. Simulation Experiments
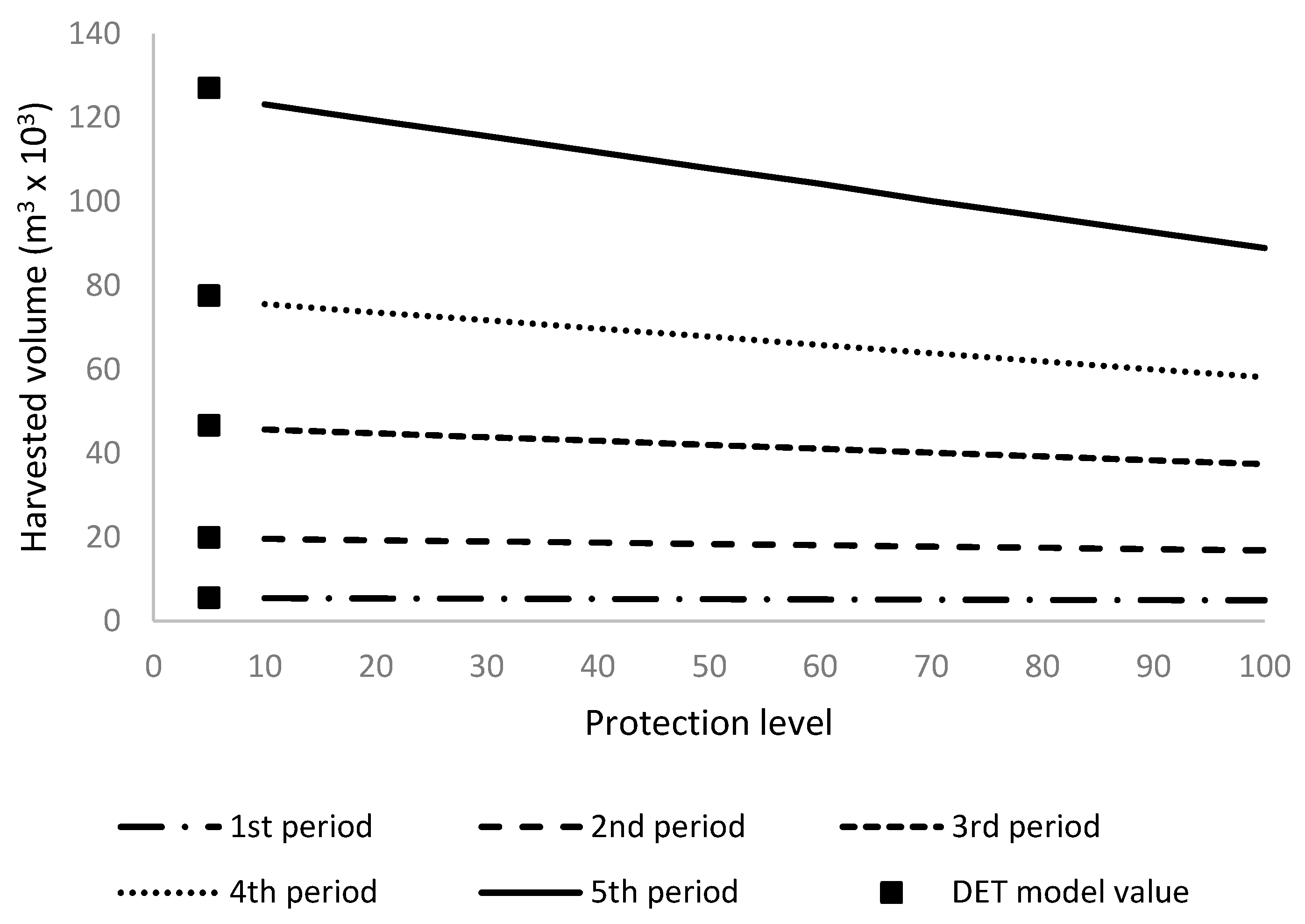
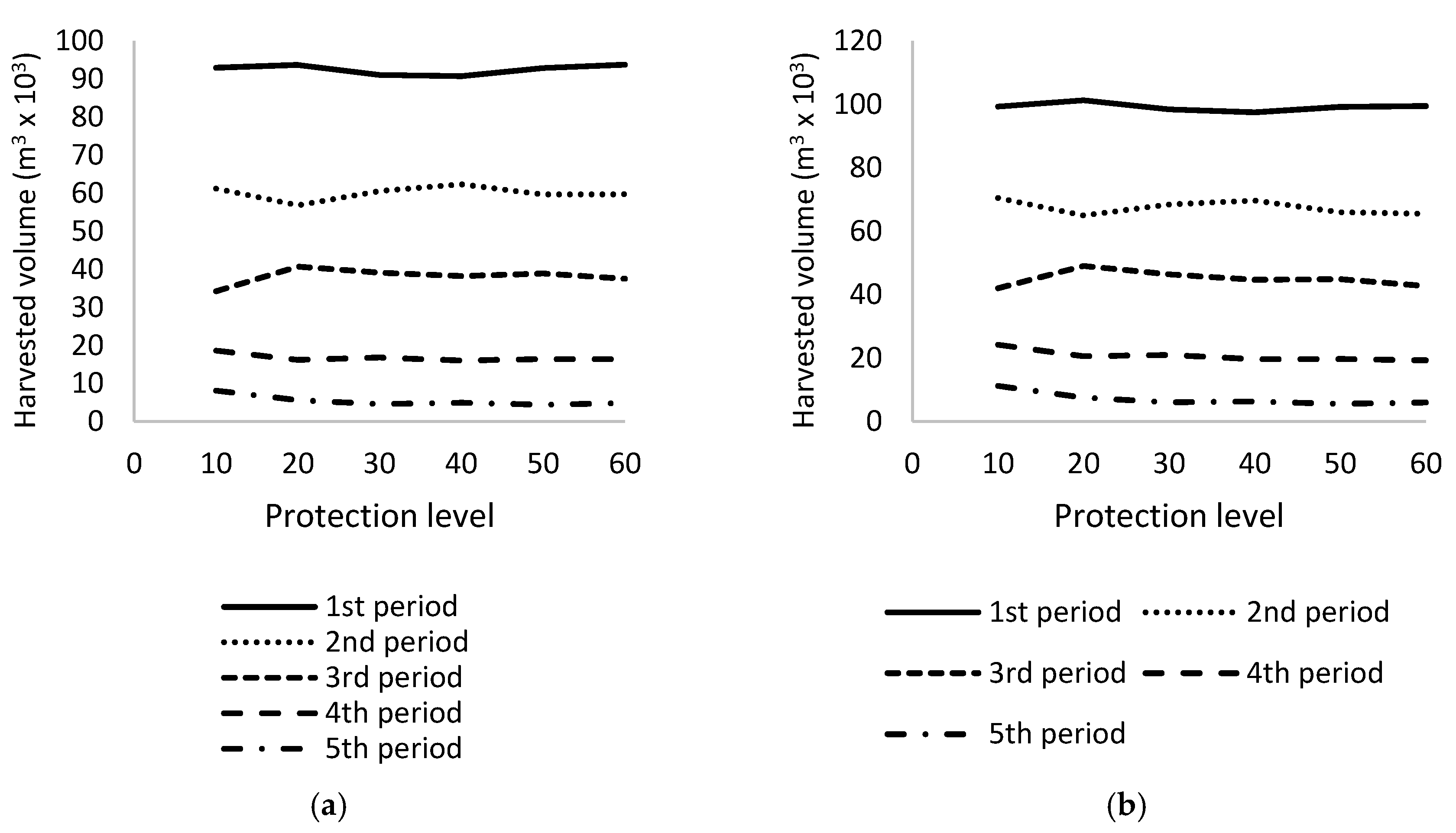
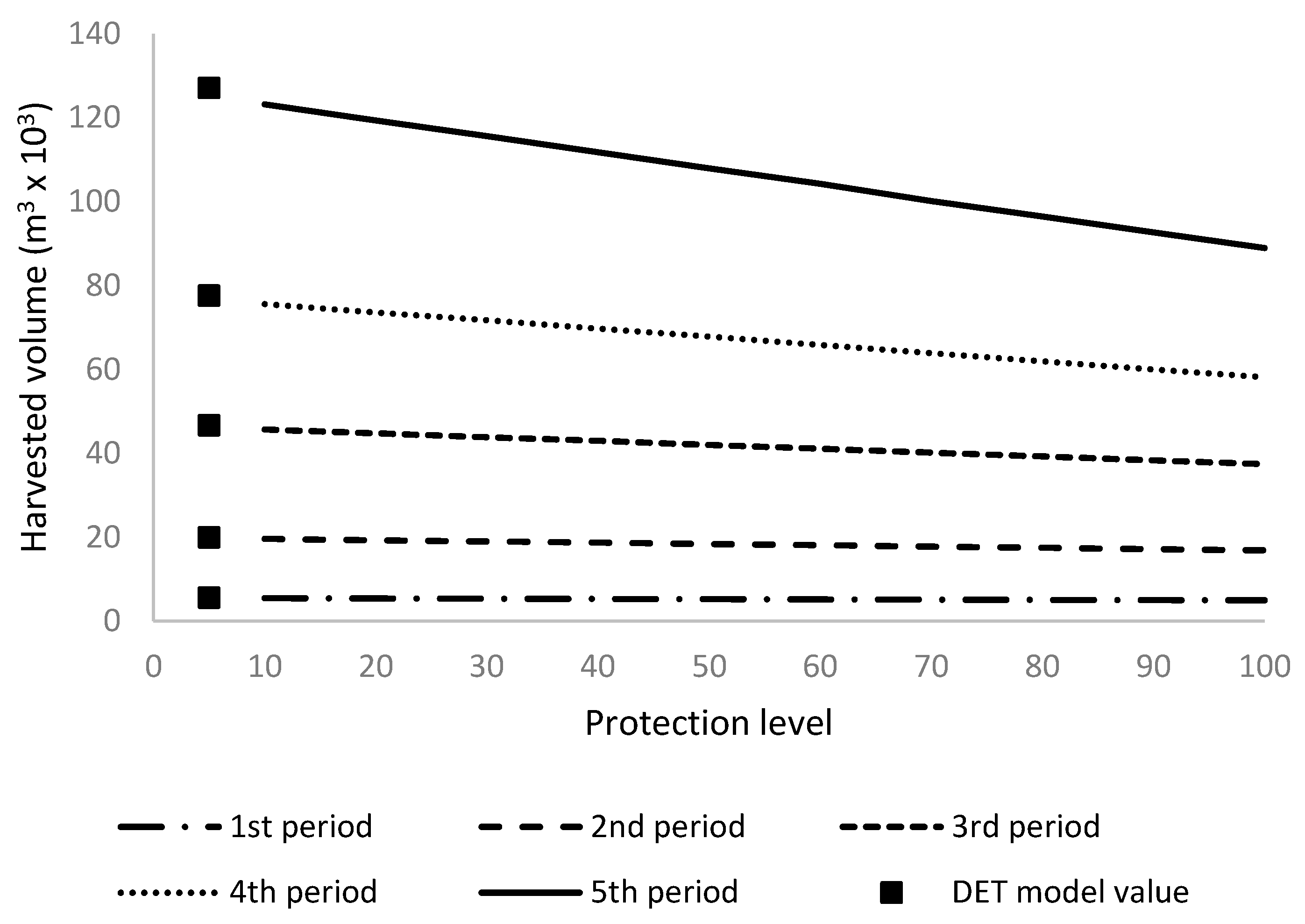
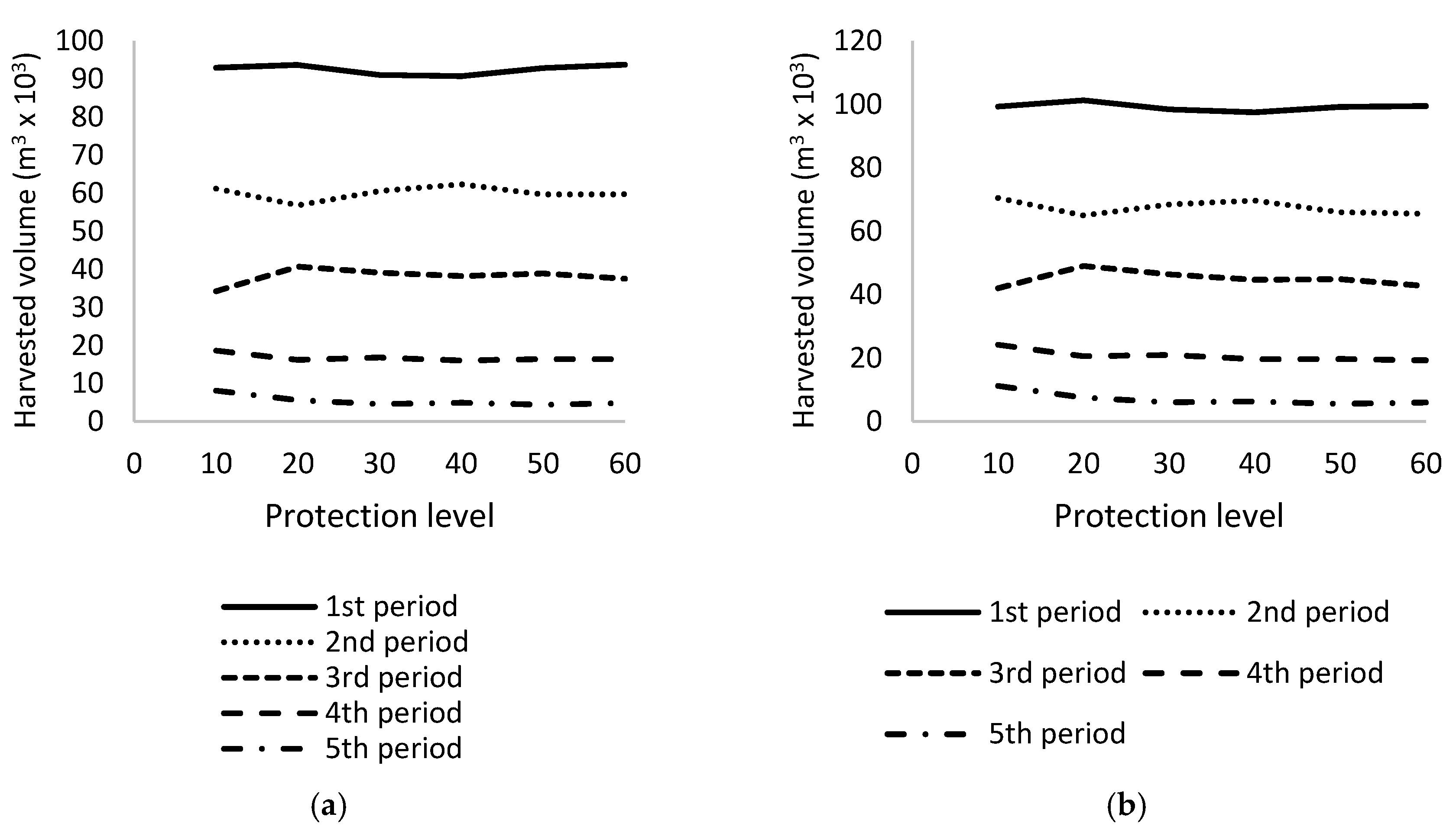
3. Results
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- FAO. Indicators of Sustainable Development: Guidelines and Methodologies, 3rd ed.; United Nations Publications: New York, NY, USA, 2007; ISBN 978-92-1-104577-2. [Google Scholar]
- Gertner, G.; Köhl, M. An assessment of some nonsampling errors in a national survey using an error budget. For. Sci. 1992, 38, 525–538. [Google Scholar]
- D’Amours, S.; Rönnqvist, M.; Weintraub, A. Using operational research for supply chain planning in the forest products industry. INFOR 2008, 46, 265–281. [Google Scholar] [CrossRef]
- Pasalodos-Tato, M.; Mäkinen, A.; Garcia-Gonyalo, J.; Borges, J.G.; Lämås, T.; Eriksson, L.O. Review. Assessing uncertainty and risk in forest planning and decision support systems: Review of classical methods and introduction of innovative approaches. For. Syst. 2013, 22, 282–303. [Google Scholar] [CrossRef]
- Palma, C.D.; Nelson, J.D. A robust optimization approach protected harvest scheduling decisions against uncertainty. Can. J. For. Res. 2009, 39, 342–355. [Google Scholar] [CrossRef]
- Johnson, K.; Scheurman, H. Techniques for prescribing optimal timber harvest and investment under different objectives—Discussion and synthesis. Forest Sci. 1977, 23, 1–31. [Google Scholar]
- Field, R. C.; Dress, P. E.; Fortson, J. C. Complementary linear and goal programming procedures for timber harvest scheduling. Forest Sci. 1980, 26, 121–133. [Google Scholar]
- Carlsson, D.; Rönnqvist, N. Supply chain management in forestry—case studies at Södra Cell AB. Eur. J. Oper. Res. 2005, 163, 589–616. [Google Scholar] [CrossRef]
- McDill, M.E.; Rebain, S.A.; Braze, J. Harvest scheduling with area-based adjacency constraints. For. Sci. 2002, 48, 631–642. [Google Scholar]
- Gunn, E.A.; Richards, E.W. Solving the adjacency problem with stand-centered constraints. Can. J. For. Res. 2005, 65, 832–842. [Google Scholar] [CrossRef]
- Yoshimoto, A.; Brodie, J.D. Short- and long-term impacts of spatial restriction on harvest scheduling with reference to riparian zone planning. Can. J. For. Res. 1994, 24, 1617–1628. [Google Scholar] [CrossRef]
- Dantzig, G.B. Linear programming under uncertainty. Manag. Sci. 1955, 1, 197–206. [Google Scholar] [CrossRef]
- Ben-Tal, A.; Nemirovski, A. Robust solutions of linear programming problems contaminated with uncertain data. Math Progr. 2000, 88, 411–424. [Google Scholar] [CrossRef]
- Bertsimas, D.; Brown, D. B.; Caramanis, C. Theory and applications of robust optimization. SIAM Rev. 2011, 53, 464–501. [Google Scholar] [CrossRef]
- Mulvey, J.M.; Vanderbei, R.J.; Zenios, S.A. Robust optimization of large-scale systems. Oper. Res. 1995, 43, 264–281. [Google Scholar] [CrossRef]
- Malcolm, S.; Zenios, S.A. Robust optimization for power capacity expansion planning. J. Oper. Res. Soc. 1994, 45, 1040–1049. [Google Scholar] [CrossRef]
- Soyster, A.L. Convex programming with set-inclusive constraints and applications to inexact linear programming. Oper. Res. 1973, 21, 1154–1157. [Google Scholar] [CrossRef]
- Bertsimas, D.; Sim, M. Robust discrete optimization and network flows. Math Progr. 2003, 98, 49–71. [Google Scholar] [CrossRef]
- Palma, C.D. Robust Optimization for Forest Resources Decision-Making under Uncertainty. Ph.D. Thesis, The University of British Columbia, Vancouver, BC, Canada, 2010. [Google Scholar]
- El-Ghaoui, L.; Oustry, F.; Lebret, H. Robust solutions to uncertain semidefinite programs. SIAM J. Optim. 1998, 9, 33–52. [Google Scholar] [CrossRef]
- Palma, C.D.; Nelson, J.D. A robust model for protecting road-building and harvest-scheduling decisions from timber estimate errors. Forest Sci. 2014, 60, 137–148. [Google Scholar] [CrossRef]
- Murphy, G.; Stander, H.C. Robust optimisation of forest transportation networks: A case study. South Hemisph. For. J. 2010, 69, 117–123. [Google Scholar] [CrossRef]
- Alvarez, P.P.; Vera, J.R. Application of robust optimization to the sawmill planning problem. Ann. Oper. Res. 2011, 219, 457–475. [Google Scholar] [CrossRef]
- Kazemi Zanjani, M.D.; Ait-Kadi, D.; Nourelfath, M. Robust production planning in a manufacturing environment with random yield: A case in sawmill production planning. Eur. J. Oper. Res. 2008, 201, 882–891. [Google Scholar] [CrossRef]
- Varas, M.; Maturana, S.; Pascual, R.; Vargas, I.; Vera, J. Scheduling production for a sawmill: A robust optimization approach. Int. J. Prod. Econ. 2014, 150, 37–51. [Google Scholar] [CrossRef]
- Bertsimas, D.; Sim, M. The price of robustness. Oper. Res. 2004, 52, 35–53. [Google Scholar] [CrossRef]
- Gurobi Optimizer Reference Manual 6.5. Available online: http://www.gurobi.com/documentation/6.5/refman/java_api_overview.html#sec:Java (accessed on 1 August 2017).
- Dykstra, D.P. Mathematical Programming for Natural Resource Management; McGraw-Hill Book Company Inc.: New York, NY, USA, 1984. [Google Scholar]
- Dong, L.; Bettinger, P.; Liu, Z.; Qin, H. Spatial Forest Harvest Scheduling for Areas involving Carbon and Timber Management Goals. Forests 2015, 6, 1362–1379. [Google Scholar] [CrossRef]
- Ollikainen, M. Forestry in bioeconomy—smart green growth for the humankind. Scand. J. For. Res. 2014, 29, 360–366. [Google Scholar] [CrossRef]
- Bettinger, P.; Sessions, J.; Chung, W.; Greatz, D.; Boston, K. Eight Heuristic Planning Techniques Applied to Three Increasingly Difficult Wildlife Planning Problems : A Summary. In Systems Analysis in Forest Resources; Springer Netherlands: Berlin, Germany, 2003; pp. 240–257. [Google Scholar]
- Hlavatý, R.; Brožová, H. Robust optimization approach in transportation problem. In Proceedings of the 35th international conference Mathematical methods in economics, Hradec Králové, Czech Republic, 2017. [Google Scholar]
- D’Andreagiovanni, F.; Raymond, A. Multiband Robust Optimization and its Adoption in Harvest Scheduling. FORMATH 2014, 13, 97–122. [Google Scholar] [CrossRef]
- Alonso-Ayuso, A.; Escudero, L. F.; Guignard, M.; Quinteros, M.; Weintraub, A. Forestry management under uncertainty. Ann. Oper. Res. 2011, 190, 17–39. [Google Scholar] [CrossRef]
- Eriksson, L.O. Planning under uncertainty at the forest level: A systems approach. Scand. J. For. Res. 2006, 21, 111–117. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
| Harvested Volume () | |||||||
|---|---|---|---|---|---|---|---|
| Period | Total | ||||||
| 1 | 2 | 3 | 4 | 5 | |||
| Harvest Flow Percentage (%) | 10 | 43,410 | 47,739 | 52,463 | 57,685 | 63,434 | 264,731 |
| 20 | 35,885 | 43,061 | 51,673 | 61,983 | 74,349 | 266,951 | |
| 30 | 29,764 | 38,692 | 50,279 | 65,323 | 84,876 | 268,934 | |
| 40 | 24,790 | 34,696 | 48,491 | 67,811 | 94,906 | 270,694 | |
| 50 | 20,713 | 30,996 | 46,492 | 69,635 | 104,426 | 272,262 | |
| 60 | 17,342 | 27,739 | 44,358 | 70,892 | 113,321 | 273,652 | |
| 70 | 14,600 | 24,814 | 42,164 | 71,633 | 121,674 | 274,885 | |
| 80 | 12,470 | 22,437 | 40,198 | 72,309 | 128,440 | 275,854 | |
| 90 | 11,118 | 21,083 | 40,048 | 75,891 | 128,046 | 276,186 | |
| 100 | 10,105 | 20,174 | 40,335 | 78,524 | 127,247 | 276,385 | |
| No harvest flow constraints | 5543 | 19,906 | 46,660 | 77,564 | 127,066 | 276,739 | |
| Harvested Volume () | |||||||
|---|---|---|---|---|---|---|---|
| Period | Total | ||||||
| 1 | 2 | 3 | 4 | 5 | |||
| Harvest flow percentage (%) | 10 | 41,244 ± 408 | 43,422 ± 738 | 45,048 ± 944 | 46,139 ± 1059 | 46,396 ± 1133 | 222,248 |
| 20 | 34,078 ± 421 | 39,161 ± 653 | 44,376 ± 928 | 49,685 ± 1180 | 54,217 ± 1079 | 221,517 | |
| 30 | 28,281 ± 292 | 35,208 ± 568 | 43,276 ± 896 | 52,334 ± 1204 | 61,929 ± 1402 | 221,027 | |
| 40 | 23,552 ± 282 | 31,593 ± 503 | 41,685 ± 908 | 54,309 ± 1184 | 69,185 ± 1428 | 220,324 | |
| 50 | 19,679 ± 249 | 28,201 ± 448 | 39,964 ± 863 | 55,748 ± 1207 | 76,196 ± 1492 | 219,789 | |
| 60 | 16,472 ± 201 | 25,240 ± 418 | 38,163 ± 849 | 56,816 ± 1302 | 82,642 ± 1445 | 219,333 | |
| 70 | 13,869 ± 156 | 22,603 ± 417 | 36,339 ± 750 | 57,251 ± 1241 | 88,628 ± 1579 | 218,690 | |
| 80 | 11,845 ± 164 | 20,408 ± 372 | 34,527 ± 772 | 57,917 ± 1151 | 93,655 ± 1568 | 218,353 | |
| 90 | 10,557 ± 173 | 19,188 ± 363 | 34,437 ± 755 | 60,806 ± 1182 | 93,340 ± 1609 | 218,327 | |
| 100 | 9597 ± 158 | 18,338 ± 340 | 34,667 ± 787 | 62,896 ± 1230 | 92,714 ± 1489 | 218,211 | |
| No harvest flow constraints | 5262 ± 108 | 18,408 ± 363 | 42,045 ± 920 | 67,879 ± 1539 | 107,904 ± 259 | 241,498 | |
| Resulting Gap Tolerance (%) | |||||||
|---|---|---|---|---|---|---|---|
| The Protection Level (%) | |||||||
| 10 | 20 | 30 | 40 | 50 | 60 | ||
| Harvest flow percentage (%) | 10 | 0.00 | 0.00 | 0.00 | No Gap | No Gap | No Gap |
| 20 | 0.00 | 0.00 | 0.00 | No Gap | No Gap | No Gap | |
| 30 | No Gap | 0.00 | 0.00 | No Gap | No Gap | No Gap | |
| 40 | No Gap | No Gap | No Gap | No Gap | No Gap | No Gap | |
| 50 | 6.60 | 5.19 | 4.18 | 3.53 | 3.21 | 3.20 | |
| 60 | 4.42 | 3.07 | 2.29 | 0.92 | 0.43 | 0.16 | |
| 70 | 4.02 | 3.03 | 1.69 | 0.83 | 0.41 | 0.08 | |
| 80 | 4.17 | 2.89 | 1.67 | 0.86 | 0.37 | 0.02 | |
| 90 | 3.98 | 2.99 | 1.64 | 0.75 | 0.35 | 0.09 | |
| 100 | 3.81 | 2.75 | 1.55 | 0.84 | 0.37 | 0.08 | |
| No harvest flow constraints | 1.62 | 1.62 | 1.62 | 0.76 | 0.43 | 0.05 | |
| ROB Model | Simulations | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Consecutive Periods | Consecutive Periods | ||||||||
| Protection Level | Harvest Flow | 1–2 | 2–3 | 3–4 | 4–5 | 1–2 | 2–3 | 3–4 | 4–5 |
| 50 | 50 | −36% | −35% | 21% | −34% | −34% | −44% | −48% | −37% |
| 50 | 60 | −36% | −35% | 18% | −34% | −34% | −34% | −60% | −51% |
| 50 | 70 | −36% | −35% | 16% | −34% | −34% | −35% | −56% | −65% |
| 50 | 80 | −33% | −32% | −29% | −31% | −31% | −21% | −9% | −2% |
| 50 | 90 | −44% | −44% | −42% | −43% | −43% | −33% | −22% | −10% |
| 50 | 100 | −41% | −41% | −39% | −39% | −39% | −45% | −35% | −24% |
| Harvested Volume () | |||||||
|---|---|---|---|---|---|---|---|
| Period | Total | ||||||
| 1 | 2 | 3 | 4 | 5 | |||
| Harvest flow percentage (%) | 50 | 69,005 | 46,287 | 35,404 | 30,980 | 23,450 | 205,126 |
| 60 | 87,437 | 48,583 | 31,436 | 23,593 | 20,447 | 211,496 | |
| 70 | 94,477 | 55,906 | 29,604 | 18,503 | 13,569 | 212,059 | |
| 80 | 93,959 | 59,997 | 32,395 | 16,198 | 9720 | 212,269 | |
| 90 | 93,765 | 59,730 | 37,691 | 14,459 | 6748 | 212,393 | |
| 100 | 93,800 | 59,795 | 37,554 | 15,942 | 5329 | 212,420 | |
| No harvest flow constraints | 92,898 | 59,677 | 38,919 | 16,461 | 4468 | 212,423 | |
| Harvested Volume () | |||||||
|---|---|---|---|---|---|---|---|
| Period | Total | ||||||
| 1 | 2 | 3 | 4 | 5 | |||
| Harvest flow percentage (%) | 50 | 73,644 ± 664 | 51,183 ± 728 | 40,771 ± 868 | 37,202 ± 1117 | 36,490 ± 1074 | 239,290 |
| 60 | 93,322 ± 726 | 53,825 ± 677 | 36,207 ± 801 | 28,318 ± 896 | 25,754 ± 1114 | 237,426 | |
| 70 | 100,876 ± 713 | 61,892 ± 817 | 34,089 ± 831 | 22,275 ± 686 | 17,074 ± 703 | 236,206 | |
| 80 | 100,289 ± 710 | 66,396 ± 857 | 37,290 ± 817 | 19,487 ± 664 | 12,240 ± 574 | 235,701 | |
| 90 | 100,063 ± 684 | 66,138 ± 805 | 43,440 ± 896 | 17,396 ± 611 | 8512 ± 446 | 235,548 | |
| 100 | 100,092 ± 725 | 66,160 ± 839 | 43,282 ± 876 | 19,143 ± 624 | 6706 ± 385 | 235,383 | |
| No harvest flow constraints | 99,148 ± 715 | 66,024 ± 843 | 44,925 ± 910 | 19,777 ± 632 | 5619 ± 369 | 235,493 | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kašpar, J.; Hlavatý, R.; Kuželka, K.; Marušák, R. The Impact of Assumed Uncertainty on Long-Term Decisions in Forest Spatial Harvest Scheduling as a Part of Sustainable Development. Forests 2017, 8, 335. https://doi.org/10.3390/f8090335
Kašpar J, Hlavatý R, Kuželka K, Marušák R. The Impact of Assumed Uncertainty on Long-Term Decisions in Forest Spatial Harvest Scheduling as a Part of Sustainable Development. Forests. 2017; 8(9):335. https://doi.org/10.3390/f8090335
Chicago/Turabian StyleKašpar, Jan, Robert Hlavatý, Karel Kuželka, and Róbert Marušák. 2017. "The Impact of Assumed Uncertainty on Long-Term Decisions in Forest Spatial Harvest Scheduling as a Part of Sustainable Development" Forests 8, no. 9: 335. https://doi.org/10.3390/f8090335
APA StyleKašpar, J., Hlavatý, R., Kuželka, K., & Marušák, R. (2017). The Impact of Assumed Uncertainty on Long-Term Decisions in Forest Spatial Harvest Scheduling as a Part of Sustainable Development. Forests, 8(9), 335. https://doi.org/10.3390/f8090335