
Towards Automated Characterization of Canopy Layering in Mixed Temperate Forests Using Airborne Laser Scanning

 , and
, and
Abstract
:1. Introduction
Aim and Research Objectives
2. Study Area and Data
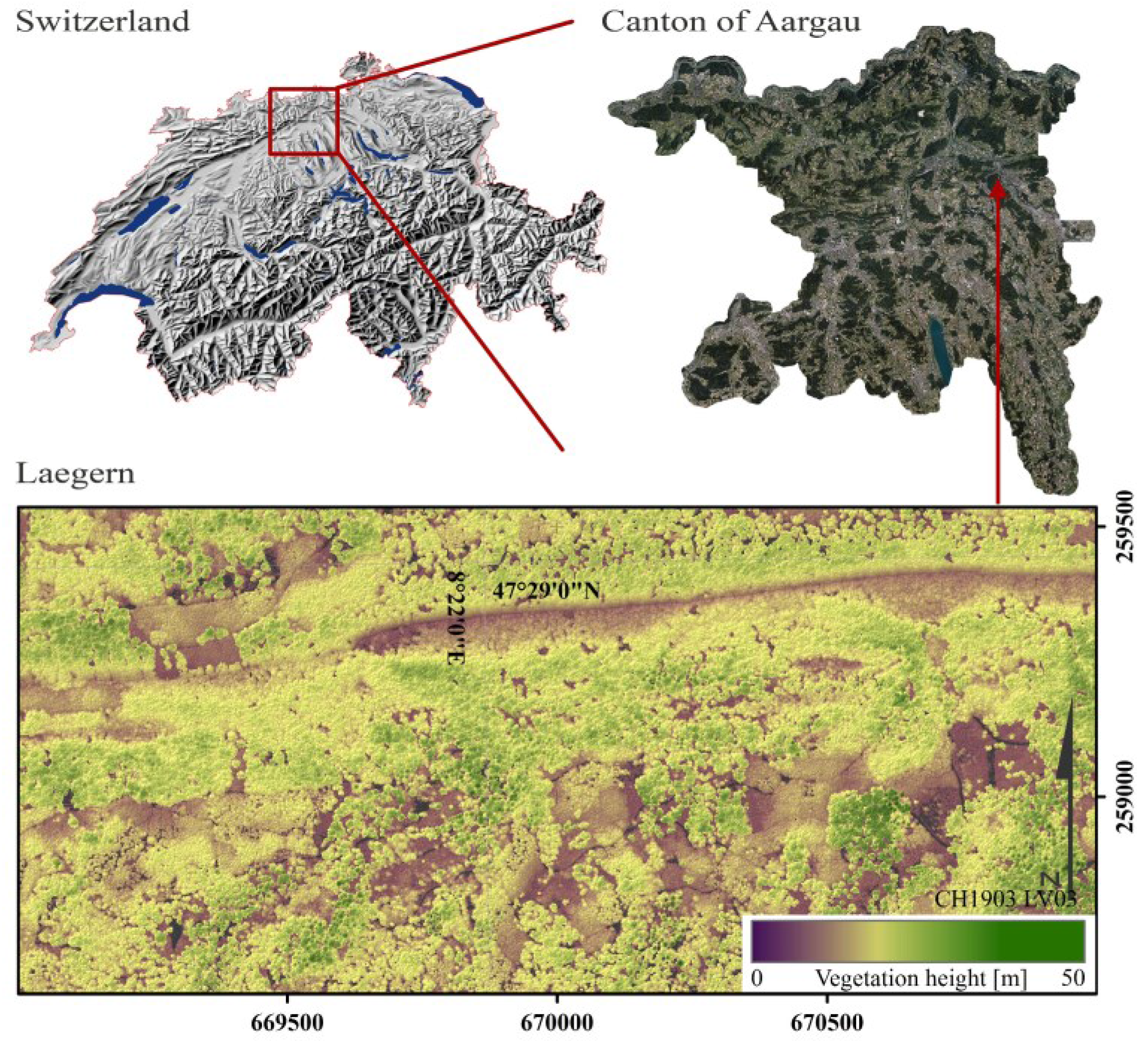
2.1. Study Site
2.2. Reference Data
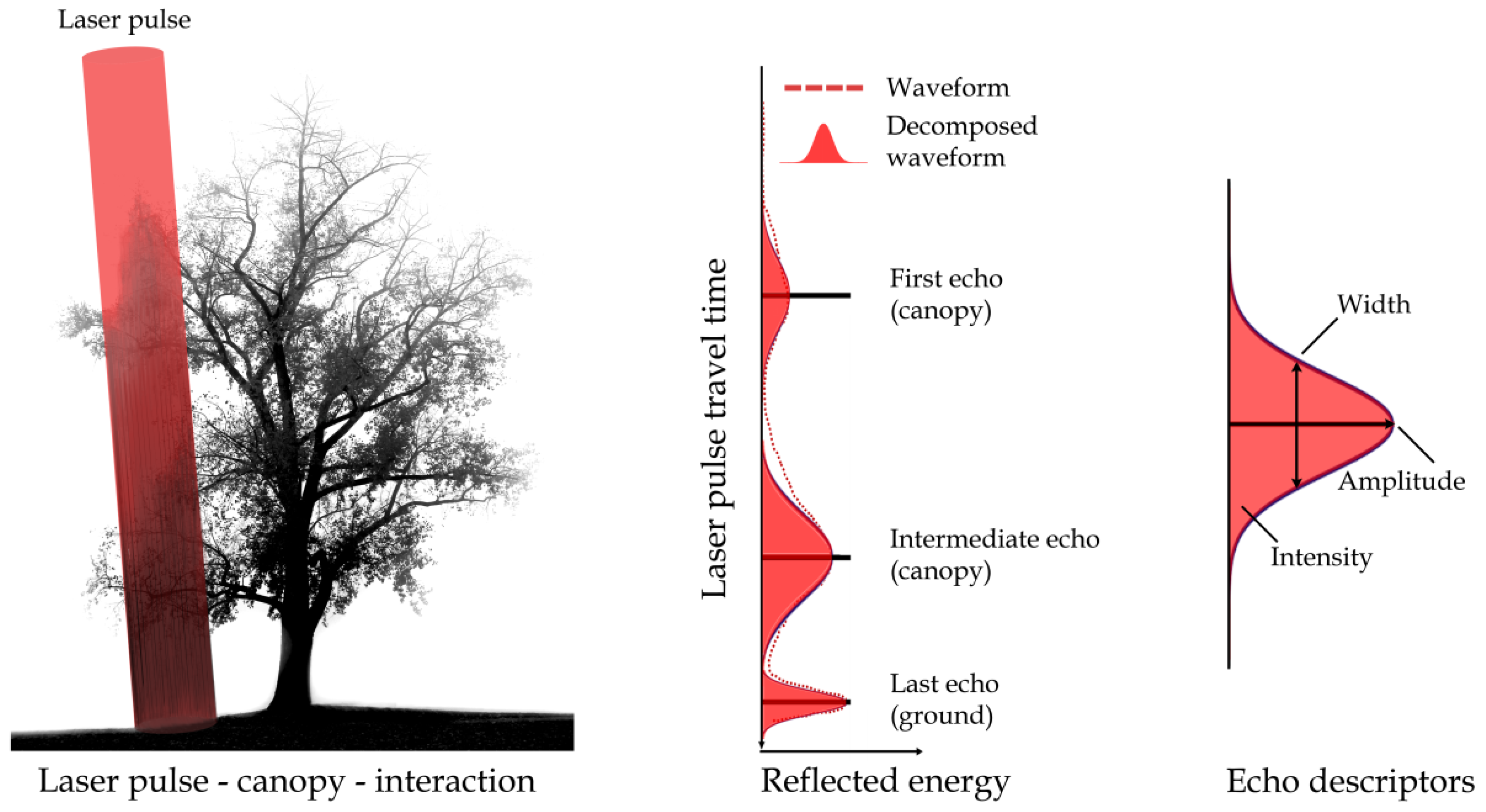
2.3. Airborne Laser Scanning Data

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Laegern (2010) | Canton of Aargau (2014) | |||
|---|---|---|---|---|
| ALS Sensor | LMS-Q560 | LMS-Q680i | LMS-Q680i | |
| Mean operating altitude above ground (m) | 500 | 600 | 700 | |
| Scanning method | rotating multi-facet mirror | |||
| Pulse detection method | full-waveform processing | |||
| Pulse length (nanoseconds) | <4 | |||
| Sampling interval (nanoseconds) | 1 | |||
| Scan angle (degree) | ±15 | ±22 | ||
| Mean point density (pts/m2) | 20 | 40 | 15 | 30 |
| Date of acquisition | 10 April | 01 August | March/April | June/July |
3. Methods
3.1. Stakeholder’s Requirements
| Canopy-Structure Descriptors (Acronym) | Definition According Stakeholder’s Requirements |
|---|---|
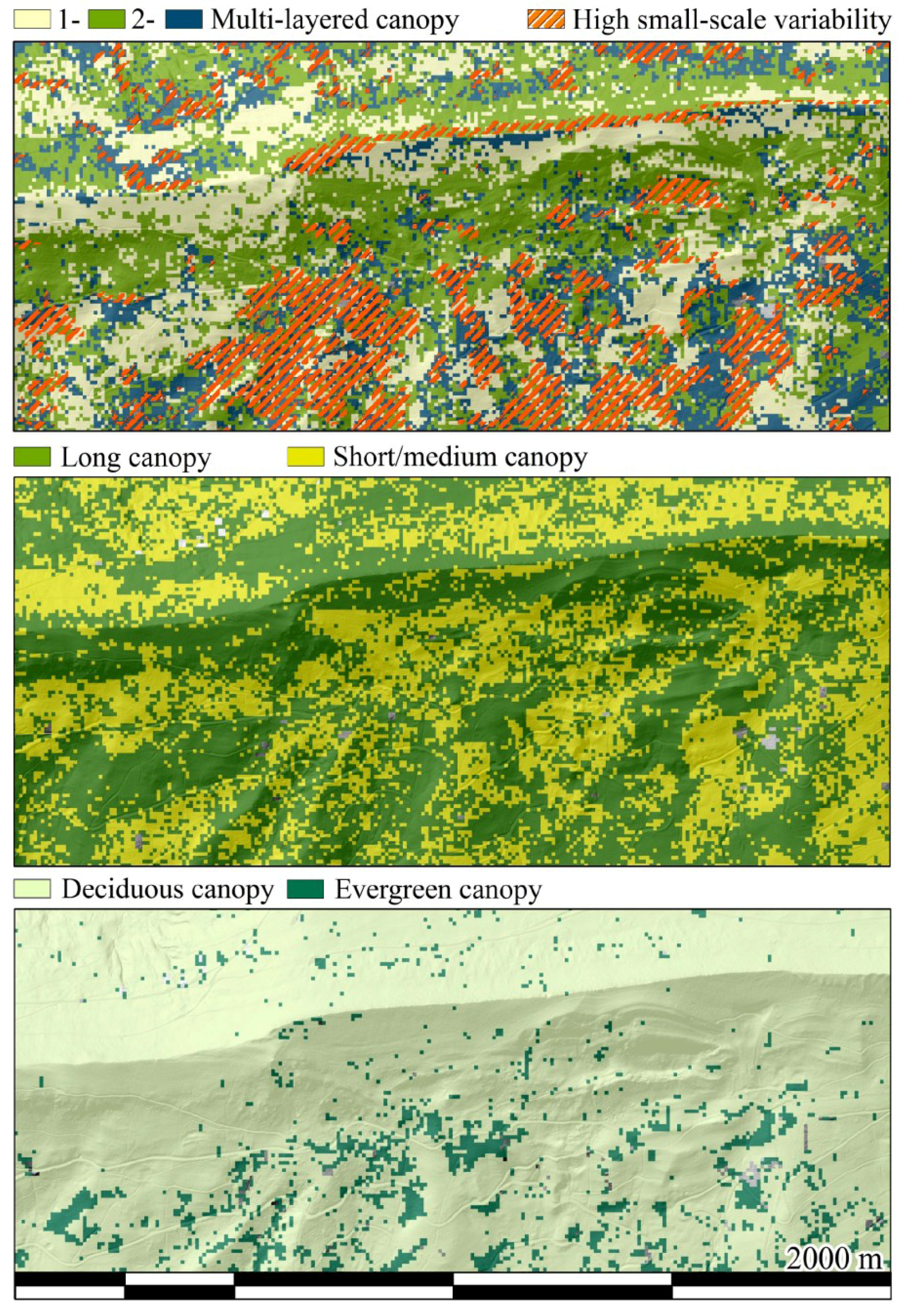
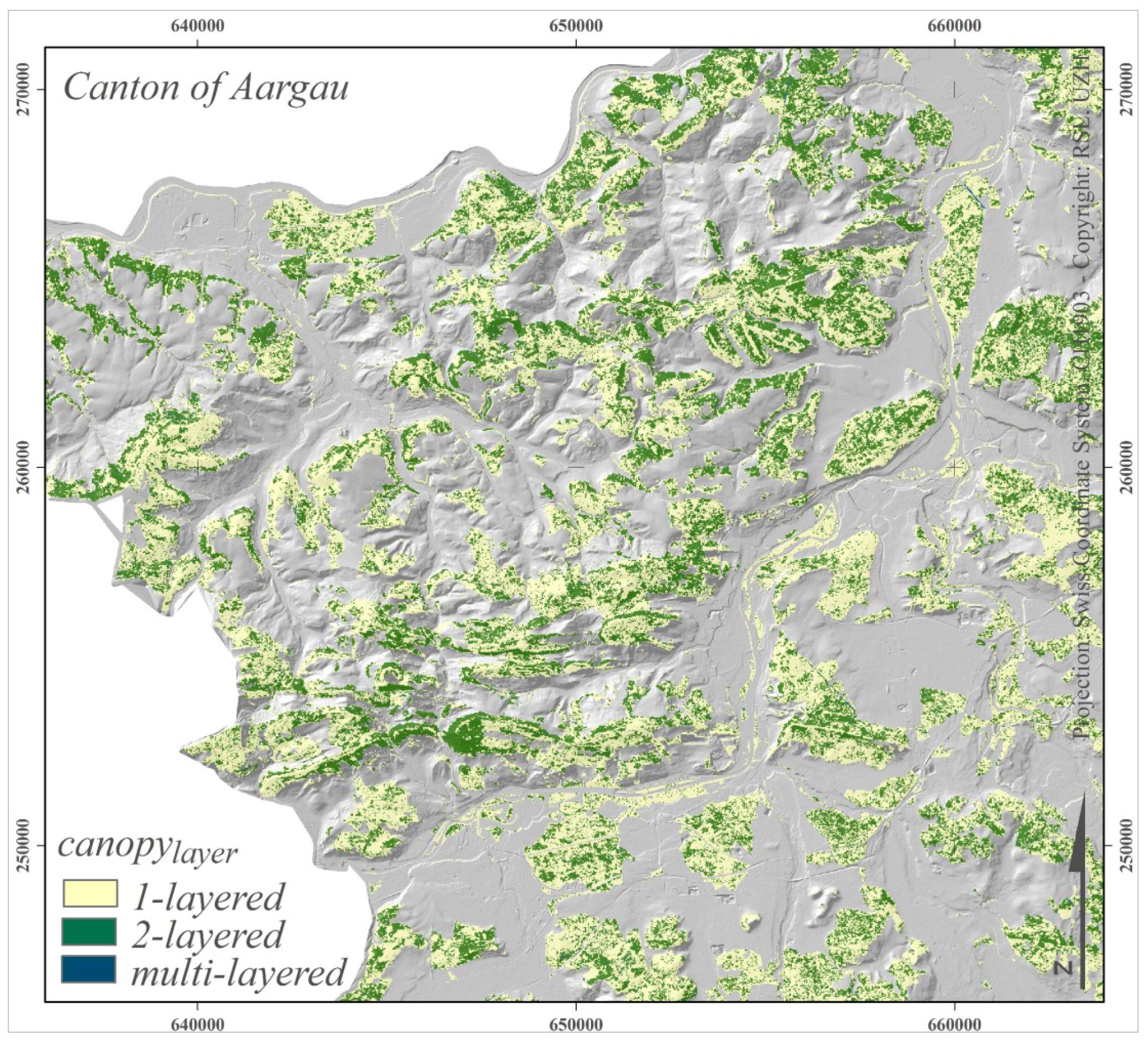
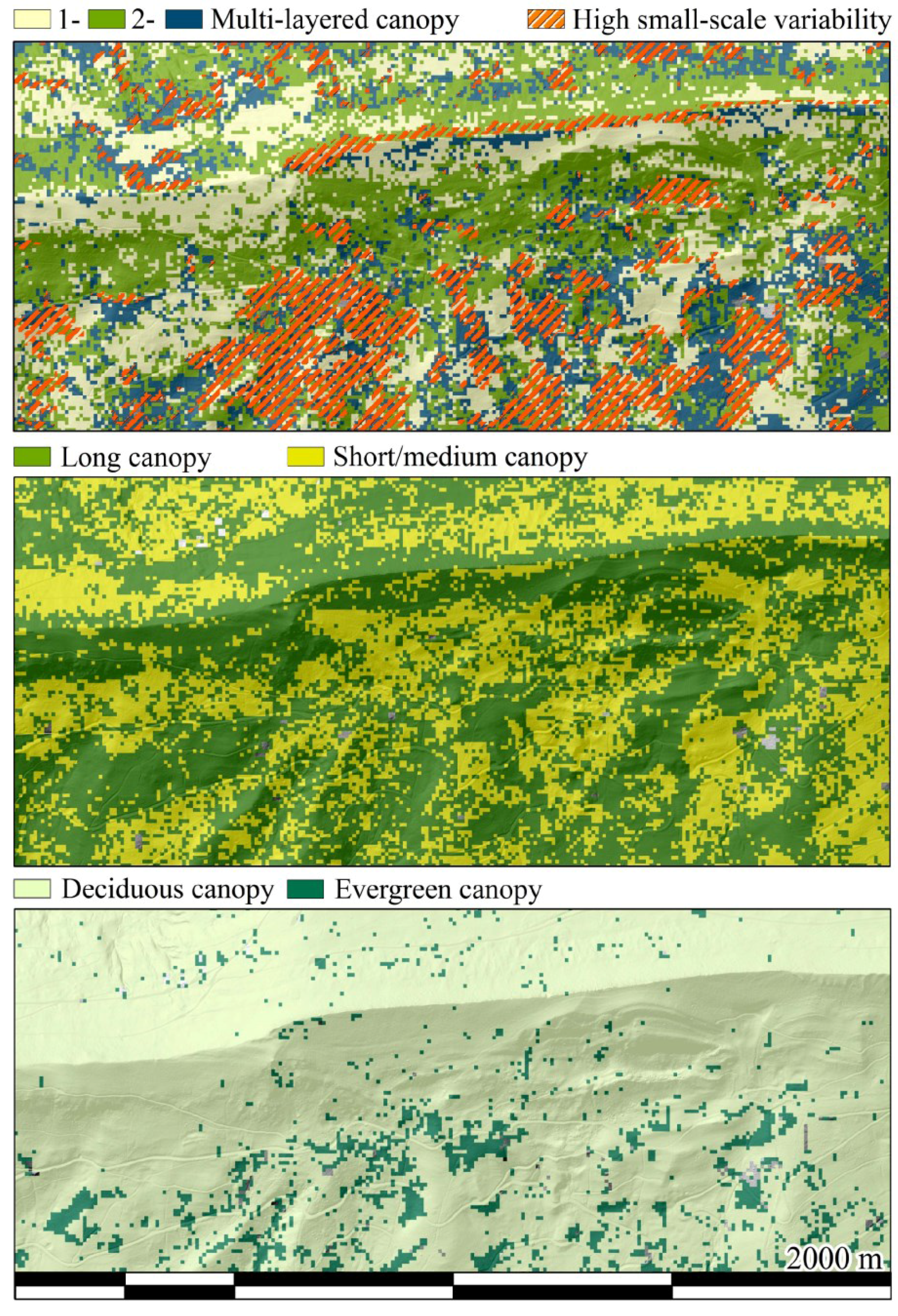
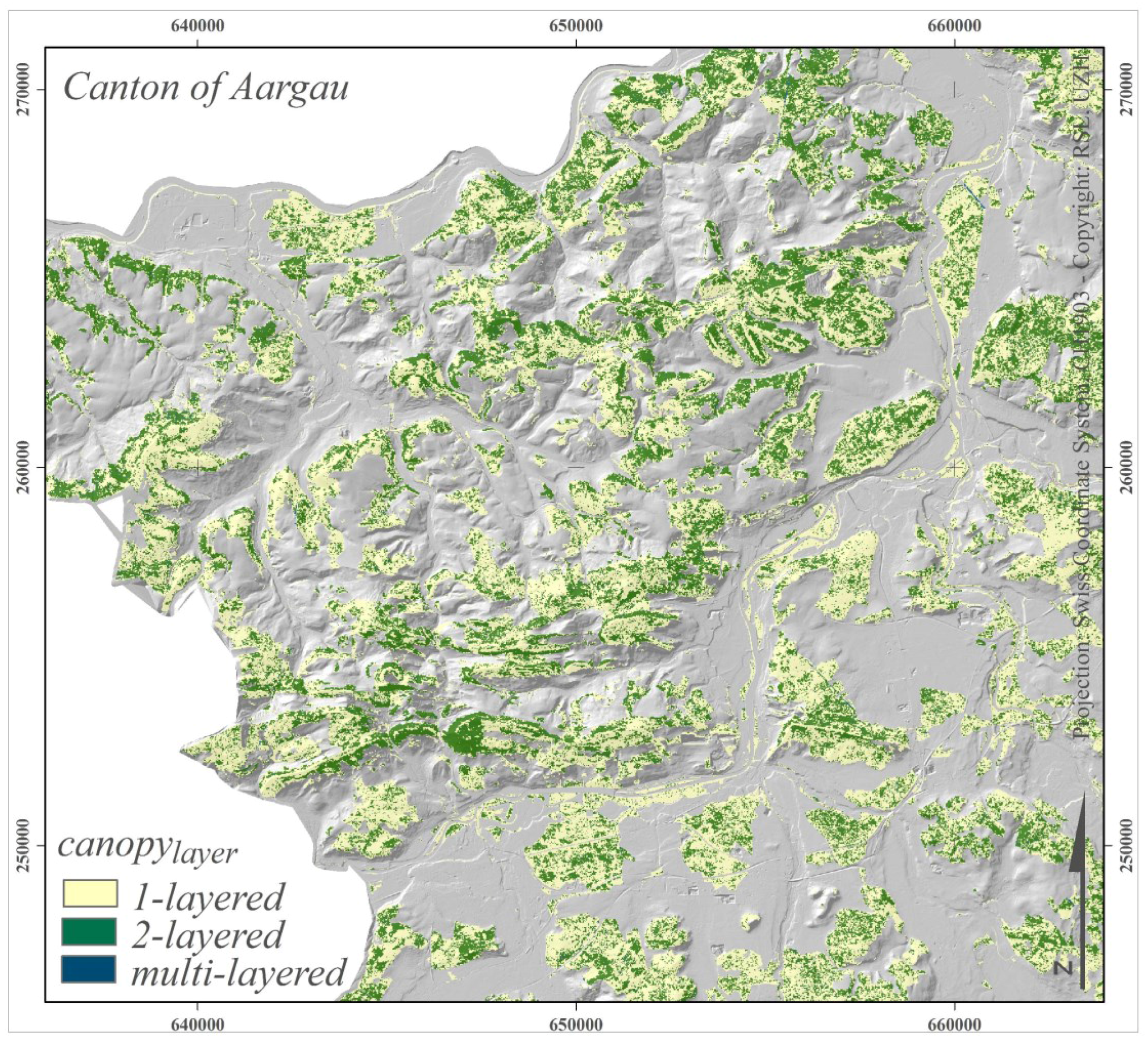
| Canopy layering (canopylayer) | A canopy layer consists of a continuous, vertical foliage distribution. A canopy layer must be ≥3 m in vertical extent. Gaps in the canopy must be ≥3 m in vertical extent to result in a separation/ delimitation of canopy layers. Three classes should be distinguished: |
| 1. 1-layered canopy | |
| 2. 2-layered canopy | |
| 3. multi-layered canopy (>2 canopy layers) | |
| Canopy length (canopylength) | Classified ratio of the length of the topmost canopy layer (vertical extent in m) and the total canopy height. Two classes should be distinguished: |
| 1. short/medium canopy (ratio of <0.5) | |
| 2. long canopy (ratio of ≥0.5) | |
| Canopy type (canopytype) | Distinction between canopies, shedding or losing foliage at the end of the growing season, and canopies having leaves throughout the year. Two classes should be distinguished: |
| 1. deciduous canopy | |
| 2. evergreen canopy | |
| Small-scale heterogeneity (canopyheterogeneity) | Small-scale variation of vertical foliage distribution within each 10 m × 10 m grid cell. Significance of variation should be defined using the p-value with a significance level of 0.05. Two classes should be distinguished: |
| 1. homogeneous canopy (non-significant variation) | |
| 2. heterogeneous canopy (significant variation) |
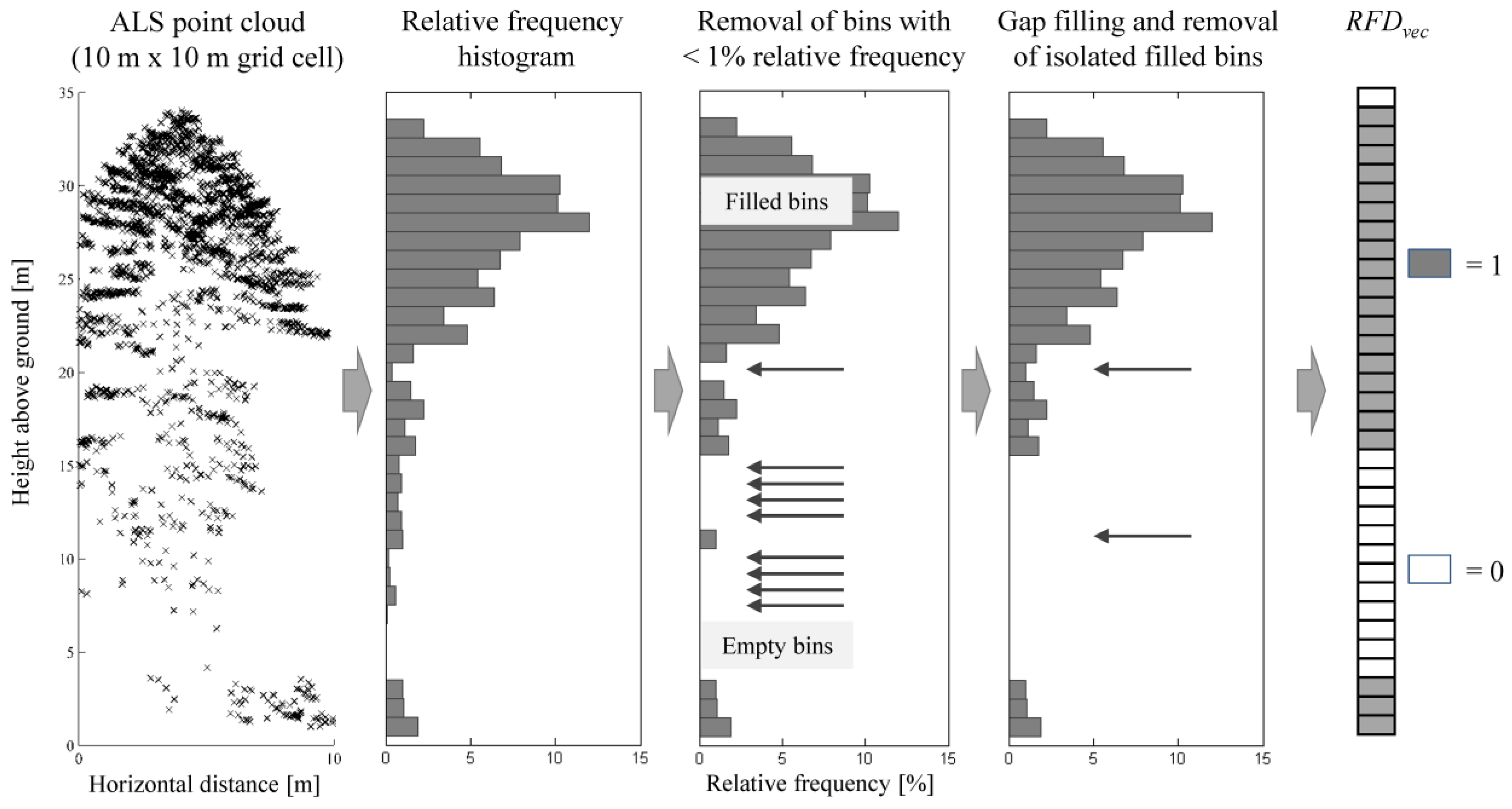
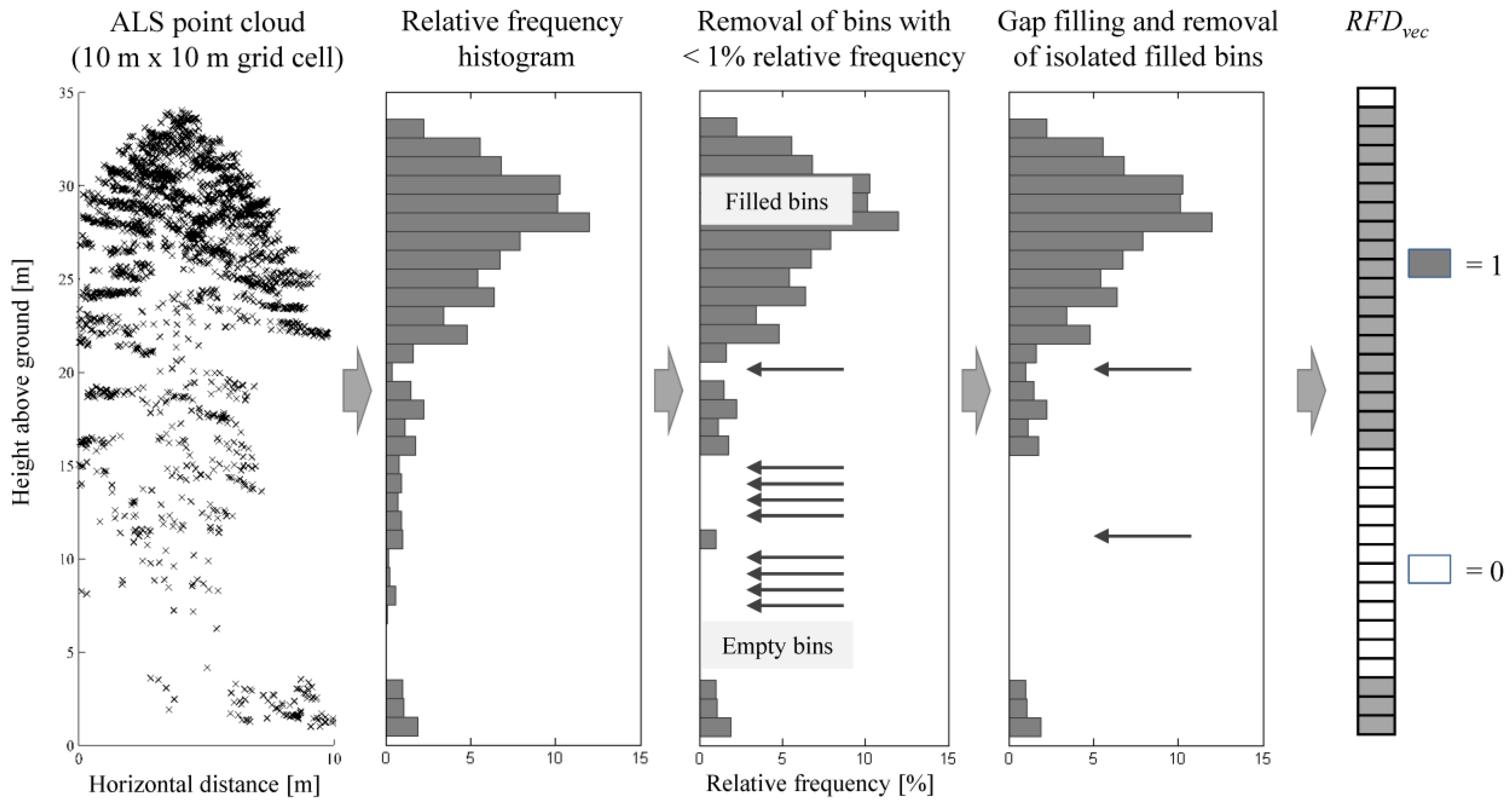
3.2. Calculation of the Relative Frequency Distribution
3.3. Calculation of Canopy-Structure Descriptors
4. Results
| Canopy-Structure Descriptors | ALS Data (2010) | ALS Data (2014) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| OA (%) | K | UA (%) | PA (%) | OA (%) | K | UA (%) | PA (%) | ||
| canopyheterogeneity | High | 58.8 | 65.2 | 54.9 | 56.0 | ||||
| 0.50 | - | - | 77.7 | 0.41 | - | ||||
| Low | - | - | 89.3 | 86.4 | - | - | 85.4 | 84.9 | |
| - | - | - | - | ||||||
| canopylayer | 1-layered | 80.0 | 79.1 | 81.4 | 81.4 | ||||
| 75.7 | 82.4 | 75.6 | 77.5 | ||||||
| 2-layered | 67.0 | 0.47 | 54.9 | 62.5 | 63.5 | 0.41 | 43.1 | 51.7 | |
| 0.43 | 57.4 | 64.6 | 59.3 | 0.39 | 47.2 | 61.0 | |||
| Multi-layered | 60.7 | 45.9 | 54.8 | 39.5 | |||||
| 55.6 | 41.7 | 58.3 | 37.9 | ||||||
| canopylength | Long | 65.8 | 74.5 | 67.9 | 51.0 | ||||
| 0.31 | 64.2 | 69.4 | 62.0 | 0.24 | 59.7 | 76.7 | |||
| Short/Medium | 63.6 | 0.27 | 66.3 | 56.4 | 61.9 | 0.23 | 58.5 | 74.2 | |
| 62.7 | 57.1 | 65.9 | 46.6 | ||||||
| canopytype | Deciduous | 96.7 | 89.0 | 95.4 | 91.3 | ||||
| 0.66 | 94.0 | 89.7 | 89.5 | 0.69 | 88.8 | 91.0 | |||
| Evergreen | 88.1 | 0.71 | 64.0 | 86.4 | 86.4 | 0.69 | 70.2 | 82.5 | |
| 74.3 | 83.8 | 81.6 | 77.5 | ||||||
| Canopy-Structure Descriptors | OA (%) | K | UA (%) | PA (%) | |
|---|---|---|---|---|---|
| canopylayer | 1-layered | 69.2 | 0.43 | 88.3 | 71.0 |
| 2-layered | 50.8 | 65.4 | |||
| Multi-layered | 38.1 | 69.1 | |||
| canopylength | Long | 70.3 | 0.38 | 57.2 | 68.1 |
| Short/Medium | 80.1 | 71.6 | |||
| canopytype | Deciduous | 90.7 | 0.78 | 91.3 | 95.5 |
| Evergreen | 89.2 | 80.2 | |||
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- De Groot, R.S.; Wilson, M.A.; Boumans, R.M.J. A typology for the classification, description and valuation of ecosystem functions, goods and services. Ecol. Econ. 2002, 41, 393–408. [Google Scholar] [CrossRef]
- Jonsson, M.; Wardle, D.A. Structural equation modelling reveals plant-community drivers of carbon storage in boreal forest ecosystems. Biol. Lett. 2010, 6, 116–119. [Google Scholar] [CrossRef] [PubMed]
- Sierra, C.A.; Loescher, H.W.; Harmon, M.E.; Richardson, A.D.; Hollinger, D.Y.; Perakis, S.S. Interannual variation of carbon fluxes from three contrasting evergreen forests: The role of forest dynamics and climate. Ecology 2009, 90, 2711–2723. [Google Scholar] [CrossRef] [PubMed]
- Bonan, G.B. Forests and climate change: Forcings, feedbacks, and the climate benefits of forests. Science 2008, 320, 1444–1449. [Google Scholar] [CrossRef] [PubMed]
- Purves, D.; Pacala, S. Predictive models of forest dynamics. Science 2008, 320, 1452–1453. [Google Scholar] [CrossRef] [PubMed]
- Nadkarni, N.M.; McIntosh, A.C.S.; Cushing, J.B. A framework to categorize forest structure concepts. For. Ecol. Manag. 2008, 256, 872–882. [Google Scholar] [CrossRef]
- Disney, M.; Lewis, P.; Saich, P. 3D modeling of forest canopy structure for remote sensing simulations in the optical and microwave domains. Remote Sens. Environ. 2006, 100, 114–132. [Google Scholar] [CrossRef]
- Kayes, L.J.; Tinker, D.B. Forest structure and regeneration following a mountain pine beetle epidemic in southeastern Wyoming. For. Ecol. Manag. 2012, 263, 57–66. [Google Scholar] [CrossRef]
- Shugart, H.H.; Saatchi, S.; Hall, F.G. Importance of structure and its measurement in quantifying function of forest ecosystems. J. Geophys. Res. 2010, 115, 1–16. [Google Scholar] [CrossRef]
- Graf, R.; Mathys, L.; Bollmann, K. Habitat assessment for forest dwelling species using LiDAR remote sensing: Capercaillie in the Alps. For. Ecol. Manag. 2009, 257, 160–167. [Google Scholar] [CrossRef]
- Lindenmayer, D.B.; Franklin, J.F.; Fischer, J. General management principles and a checklist of strategies to guide forest biodiversity conservation. Biol. Conserv. 2006, 131, 433–445. [Google Scholar] [CrossRef]
- Herrera, J.M.; García, D. Effects of forest fragmentation on seed dispersal and seedling establishment in ornithochorous trees. Conserv. Biol. 2010, 24, 1089–1098. [Google Scholar] [CrossRef] [PubMed]
- Spies, T.A. Forest structure: A key to the ecosystem. Northwest Sci. 1998, 72, 34–36. [Google Scholar]
- McElhinny, C.; Gibbons, P.; Brack, C.; Bauhus, J. Forest and woodland stand structural complexity: Its definition and measurement. For. Ecol. Manag. 2005, 218, 1–24. [Google Scholar] [CrossRef]
- Dial, R.; Bloodworh, B.; Lee, A.; Boyne, P.; Heys, J. The distribution of free space and its relation to canopy composition at six forest sites. For. Sci. 2004, 50, 312–325. [Google Scholar]
- O’Hara, K.; Nagel, L. A functional comparison of productivity in even-aged and multiaged stands: A synthesis of Pinus ponderosa. For. Sci. 2006, 52, 290–303. [Google Scholar]
- Everett, R.; Baumgartner, D.; Ohlson, P.; Schellhaas, R. Defining and quantifying canopy strata. Northwest Sci. 2008, 82, 48–64. [Google Scholar] [CrossRef]
- Parker, G.G.; Brown, M.J. Forest canopy stratification-is it useful? Am. Nat. 2000, 155, 473–484. [Google Scholar] [CrossRef] [PubMed]
- Franklin, J.F.; Spies, T.A. Composition, function, and structure of old-growth Douglas-fir forests. Wildlife and vegetation of unmanaged Douglas-fir forests. In USDA Forest Service General; Technical Report PNW-GTR-285; Pacific Northwest Research Station: Portland, OR, USA, 1991; pp. 71–81. [Google Scholar]
- Foody, G.M. Assessing the accuracy of land cover change with imperfect ground reference data. Remote Sens. Environ. 2010, 114, 2271–2285. [Google Scholar] [CrossRef]
- Haara, A.; Leskinen, P. The assessment of the uncertainty of updated stand-level inventory data. Silva Fenn. 2009, 43, 87–112. [Google Scholar] [CrossRef]
- Jones, T.G.; Coops, N.C.; Sharma, T. Assessing the utility of LiDAR to differentiate among vegetation structural classes. Remote Sens. Lett. 2012, 3, 231–238. [Google Scholar] [CrossRef]
- Hall, F.G.; Bergen, K.; Blair, J.B.; Dubayah, R.; Houghton, R.; Hurtt, G.; Kellndorfer, J.; Lefsky, M.; Ranson, J.; Saatchi, S.; et al. Characterizing 3D vegetation structure from space: Mission requirements. Remote Sens. Environ. 2011, 115, 2753–2775. [Google Scholar] [CrossRef]
- Roberts, J.; Tesfamichael, S.; Gebreslasie, M.; van Aardt, J.; Ahmed, F. Forest structural assessment using remote sensing technologies: An overview of the current state of the art. South. Hemisphere For. J. 2007, 69, 183–203. [Google Scholar] [CrossRef]
- Wulder, M.A.; Coops, N.C.; Hudak, A.T.; Morsdorf, F.; Nelson, R.; Newnham, G.; Vastaranta, M. Status and prospects for LiDAR remote sensing of forested ecosystems. Can. J. Remote Sens. 2013, 39, S1–S5. [Google Scholar] [CrossRef]
- Leiterer, R.; Mücke, W.; Morsdorf, F.; Hollaus, M.; Pfeifer, N.; Schaepman, M.E. Operational forest structure monitoring using airborne laser scanning (Flugzeuggestütztes Laserscanning für ein operationelles Waldstrukturmonitoring). Photogramm. Fernerkund. Geoinf. 2013, 3, 173–184. [Google Scholar] [CrossRef]
- Van Leeuwen, M.; Nieuwenhuis, M. Retrieval of forest structural parameters using LiDAR remote sensing. Eur. J. For. Res. 2010, 129, 749–770. [Google Scholar] [CrossRef]
- Dubayah, R.O.; Drake, J.B. Lidar remote sensing for forestry. J. For. 2000, 98, 44–52. [Google Scholar]
- Tang, H.; Dubayah, R.; Brolly, M.; Ganguly, S.; Zhang, G. Large-scale retrieval of leaf area index and vertical foliage profile from the spaceborne waveform lidar (GLAS/ICESat). Remote Sens. Environ. 2014, 154, 8–18. [Google Scholar] [CrossRef]
- Whitehurst, A.S.; Swatantran, A.; Blair, J.B.; Hofton, M.A.; Dubayah, R. Characterization of canopy layering in forested ecosystems using full waveform lidar. Remote Sens. 2013, 5, 2014–2036. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Cohen, W.B.; Acker, S.A.; Parker, G.G.; Spies, T.A.; Harding, D. Lidar remote sensing of the canopy structure and biophysical properties of douglas-fir western hemlock forests. Remote Sens. Environ. 1999, 70, 339–361. [Google Scholar] [CrossRef]
- Ferraz, A.; Bretar, F.; Jacquemoud, S.; Gonçalves, G.; Pereira, L.; Tomé, M.; Soares, P. 3-D mapping of a multi-layered Mediterranean forest using ALS data. Remote Sens. Environ. 2012, 121, 210–223. [Google Scholar] [CrossRef]
- Morsdorf, F.; Mårell, A.; Koetz, B.; Cassagne, N.; Pimont, F.; Rigolot, E.; Allgöwer, B. Discrimination of vegetation strata in a multi-layered Mediterranean forest ecosystem using height and intensity information derived from airborne laser scanning. Remote Sens. Environ. 2010, 114, 1403–1415. [Google Scholar] [CrossRef]
- Leiterer, R.; Furrer, R.; Schaepman, M.E.; Morsdorf, F. Forest canopy-structure characterization: A data-driven approach. Forest Ecol. Manag. 2015, 358, 48–61. [Google Scholar] [CrossRef]
- Wang, Y.; Weinacker, H.; Koch, B. A Lidar point cloud based procedure for vertical canopy structure analysis and 3D single tree modelling in forest. Sensors 2008, 8, 3938–3951. [Google Scholar] [CrossRef]
- Maltamo, M.; Packalén, P.; Yu, X.; Eerikäinen, K.; Hyyppä, J.; Pitkänen, J. Identifying and quantifying structural characteristics of heterogeneous boreal forests using laser scanner data. For. Ecol. Manag. 2005, 216, 41–50. [Google Scholar] [CrossRef]
- Breidenbach, J.; Næsset, E.; Lien, V.; Gobakken, T.; Solberg, S. Prediction of species specific forest inventory attributes using a nonparametric semi-individual tree crown approach based on fused airborne laser scanning and multispectral data. Remote Sens. Environ. 2010, 114, 911–924. [Google Scholar] [CrossRef]
- Frazer, G.W.; Wulder, M.A.; Niemann, K.O. Simulation and quantification of the fine-scale spatial pattern and heterogeneity of forest canopy structure: A lacunarity-based method designed for analysis of continuous canopy heights. For. Ecol. Manag. 2005, 214, 65–90. [Google Scholar] [CrossRef]
- Lee, A.C.; Lucas, R.M.; Brack, C. Quantifiying Vertical Forest Stand Structure Using Small Footprint LiDAR to Assess Potential Stand Dynamics; Institute for Forest Growth and Institute for Remote Sensing & Landscape Information Systems: Freiburg, Germany, 2004; pp. 213–217. [Google Scholar]
- Pan, Y.; Birdsey, R.A.; Phillips, O.L.; Jackson, R.B. The structure, distribution, and biomass of the world’s forests. Annu. Rev. Ecol. Evol. Syst. 2013, 44, 593–622. [Google Scholar] [CrossRef]
- Ishii, H.T.; Tanabe, S.-I.; Hiura, T. Exploring the relationships among canopy structure, stand productivity, and biodiversity of temperate forest ecosystems. For. Sci. 2004, 50, 342–355. [Google Scholar]
- Treitz, P.; Lim, K.; Woods, M.; Pitt, D.; Nesbitt, D.; Etheridge, D. LiDAR sampling density for forest resource inventories in Ontario, Canada. Remote Sens. 2012, 4, 830–848. [Google Scholar] [CrossRef]
- Zimble, D.A.; Evans, D.L.; Carlson, G.C.; Parker, R.C.; Grado, S.C.; Gerard, P.D. Characterizing vertical forest structure using small-footprint airborne LiDAR. Remote Sens. Environ. 2003, 87, 171–182. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Nelson, R.F.; Næsset, E.; Ørka, H.O.; Coops, N.C.; Hilker, T.; Bater, C.W.; Gobakken, T. LiDAR sampling for large-area forest characterization: A review. Remote Sens. Environ. 2012, 121, 196–209. [Google Scholar] [CrossRef]
- White, J.C.; Wulder, M.A.; Varhola, A.; Vastaranta, M.; Coops, N.C.; Cook, B.D.; Pitt, D.; Woods, M. A best practices guide for generating forest inventory attributes from airborne laser scanning data using an area-based approach. In Information Report FI-X-010; Natural Resources Canada, Canadian Forest Service, Pacific Forestry Centre: Victoria, BC, Canada, 2013. [Google Scholar]
- Næsset, E. Practical large-scale forest stand inventory using a small-footprint airborne scanning laser. Scand. J. For. Res. 2004, 19, 164–179. [Google Scholar] [CrossRef]
- Schneider, F.D.; Leiterer, R.; Morsdorf, F.; Gastellu-Etchegorry, J.P.; Lauret, N.; Pfeifer, N.; Schaepman, M.E. Simulating imaging spectrometer data: 3D forest modeling based on LiDAR and in situ data. Remote Sens. Environ. 2014, 152, 235–250. [Google Scholar] [CrossRef]
- Eugster, W.; Zeyer, K.; Zeeman, M.; Michna, P.; Zingg, A.; Buchmann, N.; Emmenegger, L. Nitrous oxide net exchange in a beech dominated mixed forest in Switzerland measured with a quantum cascade laser spectrometer. Biogeosci. Discuss. 2007, 4, 1167–1200. [Google Scholar] [CrossRef]
- AGIS (Aargauisches Geografisches Informationssystem). Forest Stand Monitoring (Bestandeskartierung). Available online: http://www.geoportal.ag.ch (accessed on 3 April 2015).
- Wagner, W.; Hollaus, M.; Briese, C.; Ducic, V. 3D vegetation mapping using small-footprint full-waveform airborne laser scanners. Int. J. Remote Sens. 2008, 29, 1433–1452. [Google Scholar] [CrossRef]
- RIEGL. Products. Airborne Scanning. Datasheets 2015. Available online: http://www.riegl.com (accessed on 20 October 2015).
- Wagner, W.; Ullrich, A.; Ducic, V.; Melzer, T.; Studnicka, N. Gaussian decomposition and calibration of a novel small-footprint full-waveform digitising airborne laser scanner. ISPRS J. Photogramm. Remote Sens. 2006, 60, 100–112. [Google Scholar] [CrossRef]
- Leiterer, R.; Morsdorf, F.; Torabzadeh, H.; Schaepman, M.E.; Muecke, W.; Pfeifer, N.; Hollaus, M. A voxel-based approach for canopy structure characterization using full-waveform airborne laser scanning. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Munich, Germany, 22–27 July 2012; pp. 3399–3402.
- Muss, J.D.; Mladenoff, D.J.; Townsend, P.A. A pseudo-waveform technique to assess forest structure using discrete lidar data. Remote Sens. Environ. 2011, 115, 824–835. [Google Scholar] [CrossRef]
- Morsdorf, F.; Nichol, C.; Malthus, T.; Woodhouse, I.H. Assessing forest structural and physiological information content of multi-spectral LiDAR waveforms by radiative transfer modelling. Remote Sens. Environ. 2009, 113, 2152–2163. [Google Scholar] [CrossRef]
- Farid, A.; Goodrich, D.C.; Bryant, R.; Sorooshian, S. Using airborne lidar to predict Leaf Area Index in cottonwood trees and refine riparian water-use estimates. J. Arid Environ. 2008, 72, 1–15. [Google Scholar] [CrossRef]
- Lovell, J.L.; Jupp, D.L.B.; Culvenor, D.S.; Coops, N.C. Using airborne and ground-based ranging lidar to measure canopy structure in Australian forests. Can. J. Remote Sens. 2003, 29, 607–622. [Google Scholar] [CrossRef]
- Joerg, P.C.; Morsdorf, F.; Zemp, M. Uncertainty assessment of multi-temporal airborne laser scanning data: A case study on an Alpine glacier. Remote Sens. Environ. 2012, 127, 118–129. [Google Scholar] [CrossRef]
- Kükenbrink, D.; Leiterer, R.; Schneider, F.D.; Schaepman, M.E.; Morsdorf, F. Voxel based occlusion mapping and plant area index estimation from airborne laser scanning data. In Proceedings of the SilviLaser 2015, La Grande Motte, France, 28–30 September 2015.
- Ruxton, G.D. The unequal variance t-test is an underused alternative to Student’s t-test and the Mann-Whitney U test. Behav. Ecol. 2006, 17, 688–690. [Google Scholar] [CrossRef]
- Kendall, M.G.; Gibbons, J.D. Rank Correlation Methods, 5th ed.; Oxford University Press: London, UK, 1990. [Google Scholar]
- Liu, C.; Frazier, P.; Kumar, L. Comparative assessment of the measures of thematic classification accuracy. Remote Sens. Environ. 2007, 107, 606–616. [Google Scholar] [CrossRef]
- Rosenfield, G.H.; Fitzpatrick-Lins, K. A coefficient of agreement as a measure of thematic classification accuracy. Photogramm. Eng. Remote Sens. 1986, 52, 223–227. [Google Scholar]
- Villikka, M.; Packalén, P.; Maltamo, M. The suitability of leaf-off airborne laser scanning data in an area-based forest inventory of coniferous and deciduous trees. Silva Fenn. 2012, 46, 99–110. [Google Scholar] [CrossRef]
- Ørka, H.O.; Næsset, E.; Bollandsås, O.M. Effects of different sensors and leaf-on and leaf-off canopy conditions on echo distributions and individual tree properties derived from airborne laser scanning. Remote Sens. Environ. 2010, 114, 1445–1461. [Google Scholar] [CrossRef]
- Næsset, E. Assessing sensor effects and effects of leaf-off and leaf-on canopy conditions on biophysical stand properties derived from small-footprint airborne laser data. Remote Sens. Environ. 2005, 98, 356–370. [Google Scholar] [CrossRef]
- Kim, S.; McGaughey, R.J.; Andersen, H.-E.; Gerard Schreuder, G. Tree species differentiation using intensity data derived from leaf-on and leaf-off airborne laser scanner data. Remote Sens. Environ. 2009, 113, 1575–1586. [Google Scholar] [CrossRef]
- Gobakken, T.; Næsset, E. Assessing effects of laser point density, ground sampling intensity, and field sample plot size on biophysical stand properties derived from airborne laser scanner data. Can. J. For. Res. 2008, 38, 1095–1109. [Google Scholar] [CrossRef]
- Lim, K.; Hopkinson, C.; Treitz, P. Examining the effects of sampling point densities on laser canopy height and density metrics. For. Chron. 2008, 84, 876–885. [Google Scholar] [CrossRef]
- Wilkes, P.; Jones, S.D.; Suarez, L.; Haywood, A.; Woodgate, W.; Soto-Berelov, M.; Mellor, A.; Skidmore, A.K. Understanding the effects of ALS pulse density for metric retrieval across diverse forest types. Photogramm. Eng. Remote Sens. 2015, 81, 625–635. [Google Scholar] [CrossRef]
- Hawbaker, T.J.; Gobakken, T.; Lesak, A.; Trømborg, E.; Contrucci, K.; Radeloff, V. Light detection and ranging-based measures of mixed hardwood forest structure. For. Sci. 2010, 56, 313–326. [Google Scholar]
- Hayashi, R.; Weiskittel, A.; Sader, S. Assessing the feasibility of low-density LiDAR for stand inventory attribute predictions in complex and managed forests of Northern Maine, USA. Forests 2014, 5, 363–383. [Google Scholar] [CrossRef]
- Van Oosterom, P.; Ravada, S.; Horhammer, M.; Rubi, O.M.; Ivanova, M.; Kodde, M.; Tijssen, T. Point cloud data management. In Proceedings of the IQmulus Workshop on Processing Large Geospatial Data 2014, Cardiff, Wales, UK, 8 July 2014.
- Armston, J.; Disney, M.; Lewis, P.; Scarth, P.; Phinn, S.; Lucas, R.; Bunting, P.; Goodwin, N. Direct retrieval of canopy gap probability using airborne waveform lidar. Remote Sens. Environ. 2013, 134, 24–38. [Google Scholar] [CrossRef]
- Torabzadeh, H.; Leiterer, R.; Hueni, A.; Schaepman, M.E.; Morsdorf, F. Tree species classification in dense temperate mixed forests using a combination of imaging spectroscopy and airborne laser scanning. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Québec, QC, Canada, 13–18 July 2014; pp. 1253–1256.
- Lindberg, E.; Eysn, L.; Hollaus, M.; Holmgren, J.; Pfeifer, N. Delineation of tree crowns and tree species classification from full-waveform airborne laser scanning data using 3-D ellipsoidal clustering. IEEE J. Sel. Topics Appl. Earth Obs. Remote Sens. 2014, 7, 3174–3181. [Google Scholar] [CrossRef]
- Scanlan, I.; McElhinny, C.; Turner, P. A methodology for modelling canopy structure: An exploratory analysis in the tall wet eucalypt forests of Southern Tasmania. Forests 2010, 1, 4–24. [Google Scholar] [CrossRef]
- Torabzadeh, H.; Leiterer, R.; Tuia, D.; Schaepman, M.E.; Morsdorf, F. 3D iterative tree crown delineation in a multi-layered forest. Remote Sens. Environ. 2015. submitted. [Google Scholar]
- Wing, B.M.; Ritchie, M.W.; Boston, K.; Cohen, W.B.; Gitelman, A.; Olsen, M.J. Prediction of understory vegetation cover with airborne lidar in an interior ponderosa pine forest. Remote Sens. Environ. 2012, 124, 730–741. [Google Scholar] [CrossRef]
- Gao, T.; Hedblom, M.; Emilsson, T.; Nielsen, A.B. The role of forest stand structure as biodiversity indicator. For. Ecol. Manag. 2014, 330, 82–93. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leiterer, R.; Torabzadeh, H.; Furrer, R.; Schaepman, M.E.; Morsdorf, F. Towards Automated Characterization of Canopy Layering in Mixed Temperate Forests Using Airborne Laser Scanning. Forests 2015, 6, 4146-4167. https://doi.org/10.3390/f6114146
Leiterer R, Torabzadeh H, Furrer R, Schaepman ME, Morsdorf F. Towards Automated Characterization of Canopy Layering in Mixed Temperate Forests Using Airborne Laser Scanning. Forests. 2015; 6(11):4146-4167. https://doi.org/10.3390/f6114146
Chicago/Turabian StyleLeiterer, Reik, Hossein Torabzadeh, Reinhard Furrer, Michael E. Schaepman, and Felix Morsdorf. 2015. "Towards Automated Characterization of Canopy Layering in Mixed Temperate Forests Using Airborne Laser Scanning" Forests 6, no. 11: 4146-4167. https://doi.org/10.3390/f6114146
APA StyleLeiterer, R., Torabzadeh, H., Furrer, R., Schaepman, M. E., & Morsdorf, F. (2015). Towards Automated Characterization of Canopy Layering in Mixed Temperate Forests Using Airborne Laser Scanning. Forests, 6(11), 4146-4167. https://doi.org/10.3390/f6114146