
Predicting Forest Trail Degradation Susceptibility Using GIS-Based Explainable Machine Learning

Abstract
1. Introduction
2. Materials and Methods
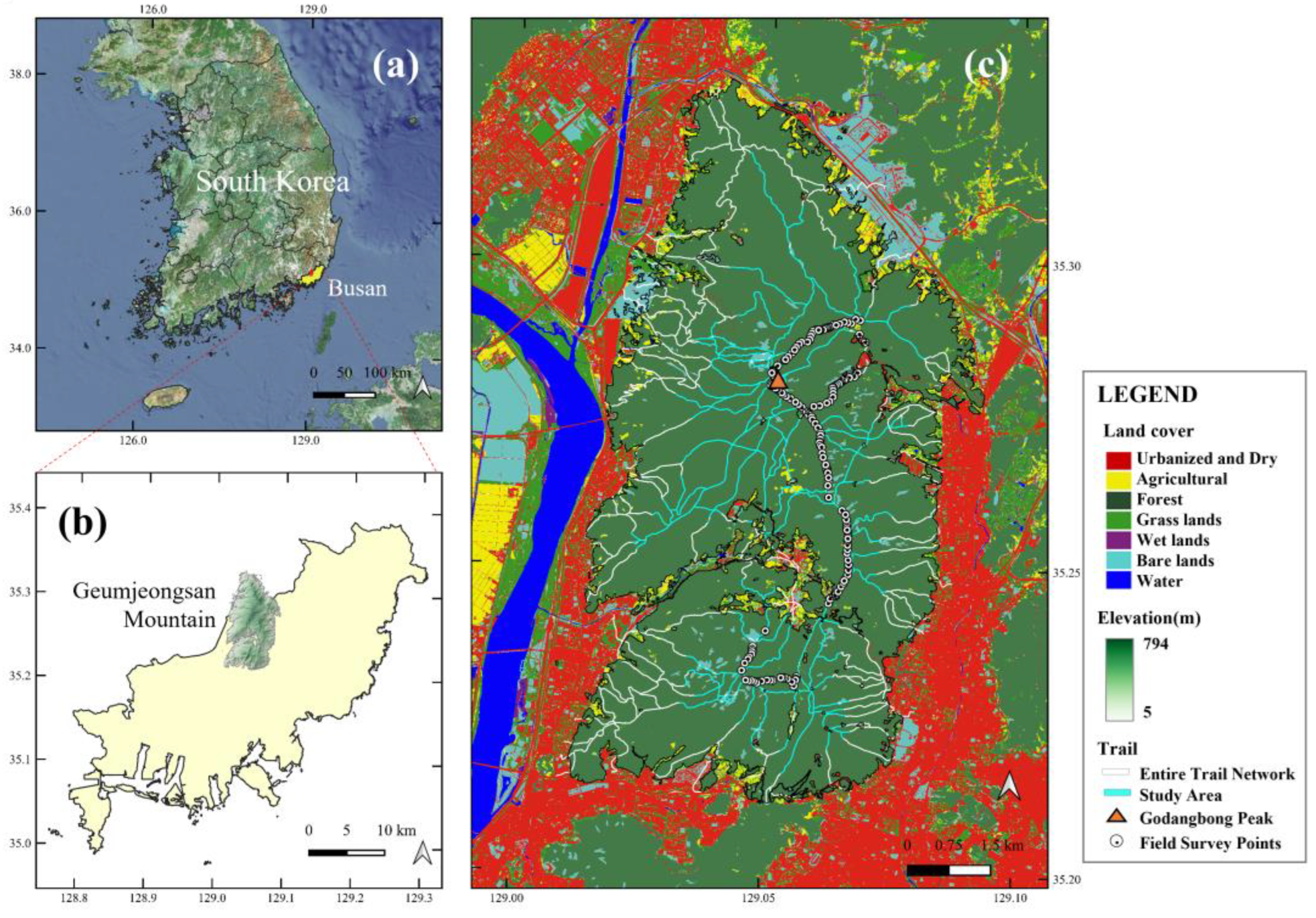
2.1. Study Area
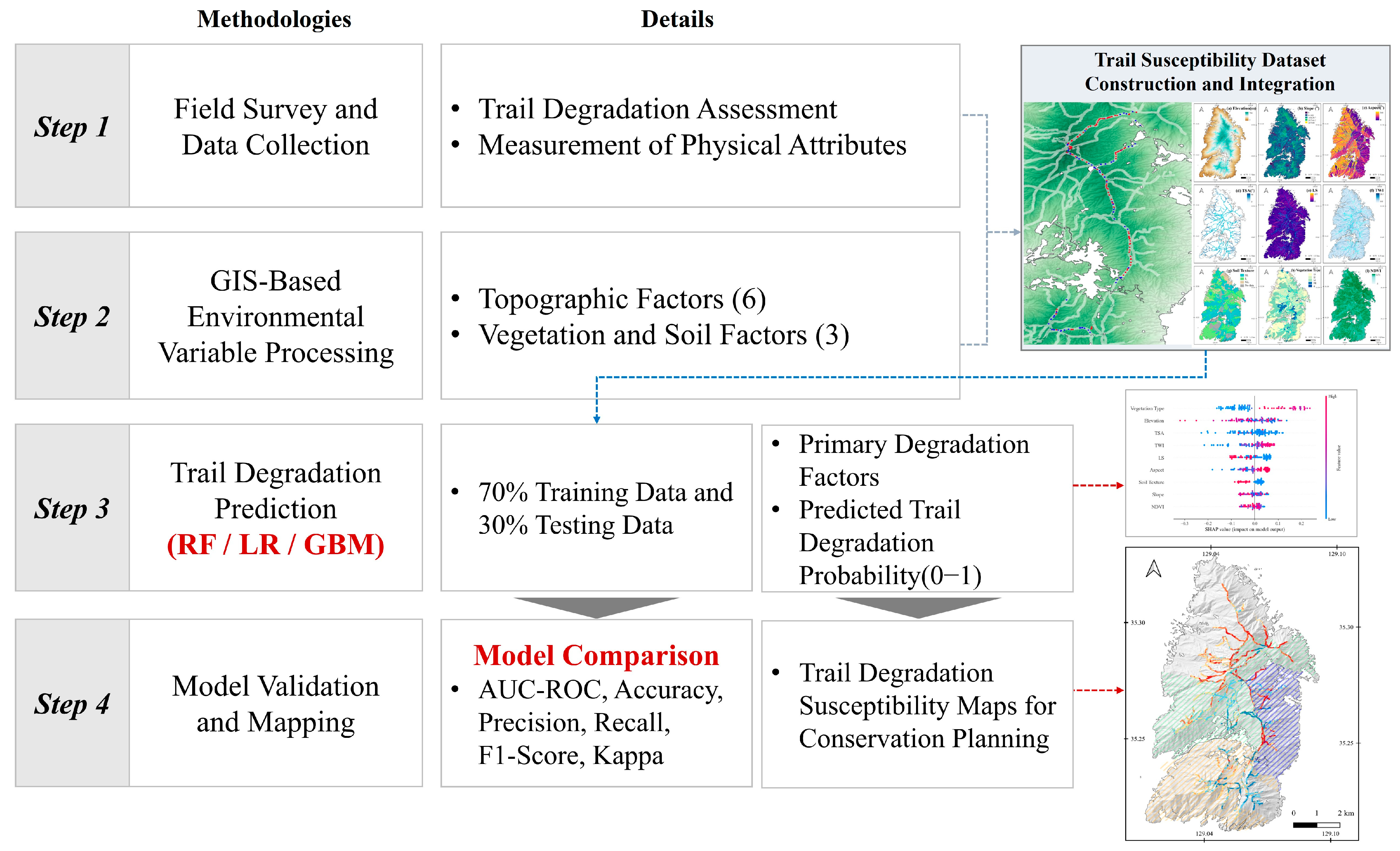
2.2. Research Framework
2.3. Data Acquisition and Processing
2.3.1. Field Survey and Trail Condition Assessment
2.3.2. Environmental Variable Acquisition and GIS Processing
2.4. Predictive Modeling
2.4.1. Binary Logistic Regression (LR) Model
2.4.2. Random Forest (RF) Model
2.4.3. Gradient Boosting Model
2.5. Model Validation and Performance Evaluation
3. Results
3.1. Field Survey Results
3.2. Environmental Variable Identification and Spatial Analysis
3.3. Model Performance Comparison
3.3.1. Standard Validation Results
3.3.2. Spatial Cross-Validation Assessment
3.3.3. Model Selection Justification
3.4. Factors Influencing Trail Degradation Prediction
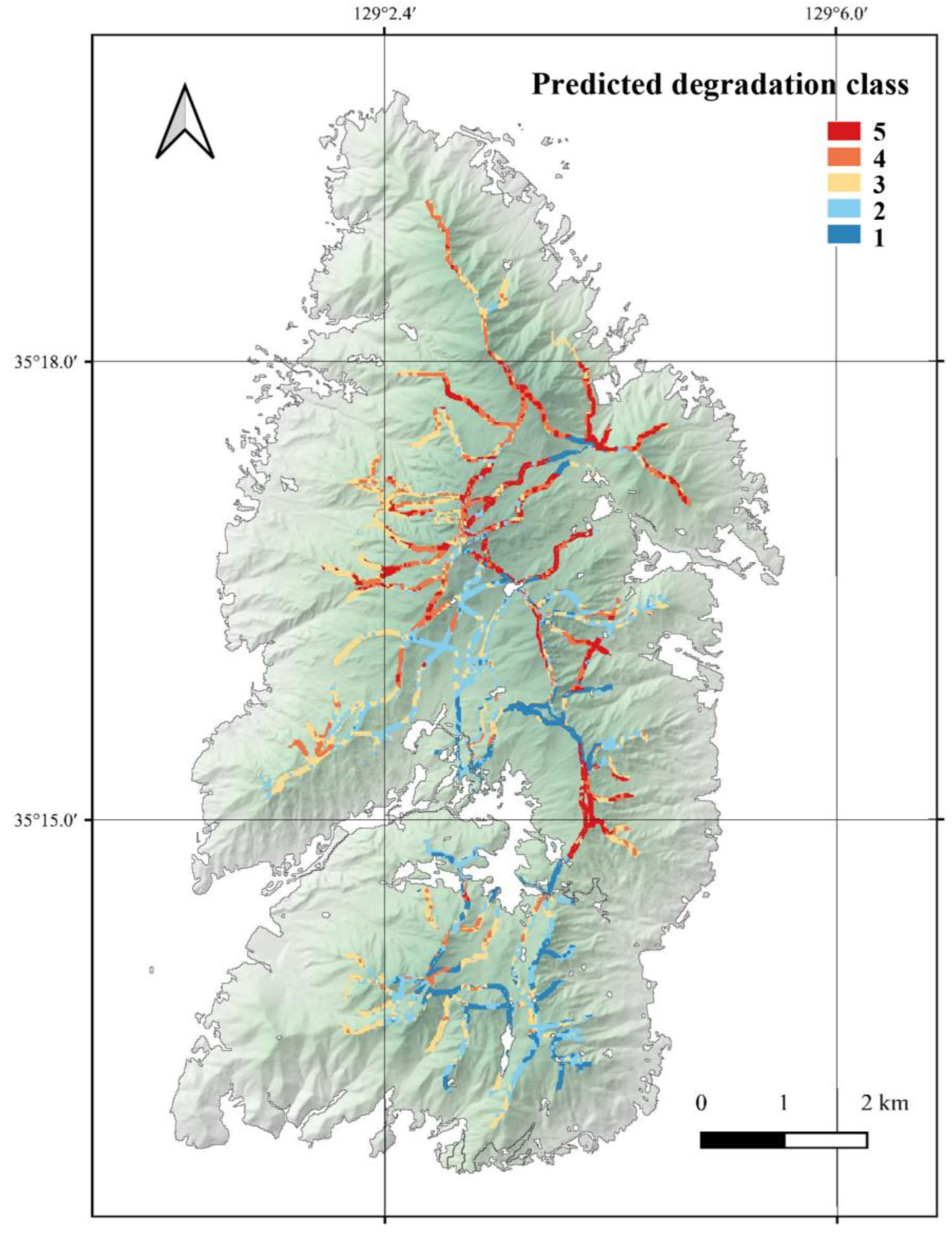
3.5. Trail Degradation Susceptibility Mapping
4. Discussion
4.1. Explainable Prediction of Trail Degradation Susceptibility
4.2. Ecological Mechanisms and Theoretical Context
4.3. Management Implications and Policy Integration
4.4. Limitations and Future Research
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tomczyk, A.M. A GIS Assessment and Modelling of Environmental Sensitivity of Recreational Trails: The Case of Gorce National Park, Poland. Appl. Geogr. 2011, 31, 339–351. [Google Scholar] [CrossRef]
- Pagneux, E.; Sturludóttir, E.; Ólafsdóttir, R. Modelling of Recreational Trails in Mountainous Areas: An Analysis of Sensitivity to Slope Data Resolution. Appl. Geogr. 2023, 160, 103112. [Google Scholar] [CrossRef]
- Venter, Z.S.; Barton, D.N.; Gundersen, V.; Figari, H.; Nowell, M.S. Back to Nature: Norwegians Sustain Increased Recreational Use of Urban Green Space Months after the COVID-19 Outbreak. Landsc. Urban. Plan. 2021, 214, 104175. [Google Scholar] [CrossRef]
- Spernbauer, B.S.; Monz, C.; D’Antonio, A.; Smith, J.W. Factors Influencing Informal Trail Conditions: Implications for Management and Research in Urban-Proximate Parks and Protected Areas. Landsc. Urban. Plan. 2023, 231, 104661. [Google Scholar] [CrossRef]
- Alice, L.; Ivana, Z.; Jerylee, W.A. Mountain Bike Trails in Urban Forests: Meeting Recreation Demands in Vienna and Zurich. J. Outdoor Recreat. Tour. 2025, 49, 100861. [Google Scholar] [CrossRef]
- Ballantyne, M.; Pickering, C.M. The Impacts of Trail Infrastructure on Vegetation and Soils: Current Literature and Future Directions. J. Environ. Manag. 2015, 164, 53–64. [Google Scholar] [CrossRef]
- Hockett, K.S.; Marion, J.L.; Leung, Y.F. The Efficacy of Combined Educational and Site Management Actions in Reducing Off-Trail Hiking in an Urban-Proximate Protected Area. J. Environ. Manag. 2017, 203, 17–28. [Google Scholar] [CrossRef]
- Chisholm, T.; McCune, J.L. Vegetation Type and Trail Use Interact to Affect the Magnitude and Extent of Recreational Trail Impacts on Plant Communities. J. Environ. Manag. 2024, 351, 119817. [Google Scholar] [CrossRef]
- Power, D.; Lambe, B.; Murphy, N. Trends in Recreational Walking Trail Usage in Ireland during the COVID-19 Pandemic: Implications for Practice. J. Outdoor Recreat. Tour. 2023, 41, 100477. [Google Scholar] [CrossRef]
- Misra, S.; Abdelgawad, N.; Wernstedt, K.; Saaty, M.; Patel, J.; Marion, J.; McCrickard, S. Toward a Management Framework for Smart and Sustainable Resource Management: The Case of the Appalachian Trail. J. Environ. Manag. 2024, 372, 123422. [Google Scholar] [CrossRef]
- Rodway-Dyer, S.; Ellis, N. Combining Remote Sensing and On-Site Monitoring Methods to Investigate Footpath Erosion within a Popular Recreational Heathland Environment. J. Environ. Manag. 2018, 215, 68–78. [Google Scholar] [CrossRef] [PubMed]
- Peterson, B.A.; Brownlee, M.T.J.; Marion, J.L. Mapping the Relationships between Trail Conditions and Experiential Elements of Long-Distance Hiking. Landsc. Urban. Plan. 2018, 180, 60–75. [Google Scholar] [CrossRef]
- Cole, D.N. Minimizing Conflict between Recreation and Nature Conservation. In Ecology of Greenways: Design and Function of Linear Conservation Areas; University of Minnesota Press: Minneapolis, MN, USA, 1993; pp. 105–122. [Google Scholar]
- Leung, Y.-F.; Marion, J.L. Trail Degradation as Influenced by Environmental Factors: A State-of-the-Knowledge Review. J. Soil. Water Conserv. 1996, 51, 130–136. [Google Scholar] [CrossRef]
- Marion, J.L. Trail Sustainability: A State-of-Knowledge Review of Trail Impacts, Influential Factors, Sustainability Ratings, and Planning and Management Guidance. J. Environ. Manag. 2023, 340, 117868. [Google Scholar] [CrossRef]
- Tomczyk, A.M.; Ewertowski, M. Planning of Recreational Trails in Protected Areas: Application of Regression Tree Analysis and Geographic Information Systems. Appl. Geogr. 2013, 40, 129–139. [Google Scholar] [CrossRef]
- Salesa, D.; Cerdà, A. Soil Erosion on Mountain Trails as a Consequence of Recreational Activities. A Comprehensive Review of the Scientific Literature. J. Environ. Manag. 2020, 271, 110990. [Google Scholar] [CrossRef] [PubMed]
- dos Santos Pereira, L.; Rodrigues, A.M.; do Carmo Oliveira Jorge, M.; Guerra, A.J.T.; Booth, C.A.; Fullen, M.A. Detrimental Effects of Tourist Trails on Soil System Dynamics in Ubatuba Municipality, São Paulo State, Brazil. Catena 2022, 216, 106431. [Google Scholar] [CrossRef]
- Marion, J.L.; Olive, N. Assessing and Understanding Trail Degradation: Results from Big South Fork National River and Recreational Area; U.S. Geological Survey: Reston, VA, USA, 2006. [CrossRef]
- Hammitt, W.E.; Cole, D.N.; Monz, C.A. Wildland Recreation: Ecology and Management; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Minehart, K.; Antonio, A.D.; Creany, N.; Monz, C.; Gutzwiller, K. Predicting Trail Condition Using Random Forest Models in Urban-Proximate Nature Reserves. Environ. Chall. 2024, 15, 100937. [Google Scholar] [CrossRef]
- Hilyer, T.; Martin, R.H.; Turley, F. Comparing Hydrologic Impacts on Recreational Trails to Remotely Sensed Data. Remote Sens. Appl. 2023, 32, 101052. [Google Scholar] [CrossRef]
- Tomczyk, A.M.; Ewertowski, M.W. Recreational Trails in the Poprad Landscape Park, Poland: The Spatial Pattern of Trail Impacts and Use-Related, Environmental, and Managerial Factors. J. Maps 2016, 12, 1227–1235. [Google Scholar] [CrossRef]
- Eagleston, H.; Marion, J.L. Application of Airborne LiDAR and GIS in Modeling Trail Erosion along the Appalachian Trail in New Hampshire, USA. Landsc. Urban. Plan. 2020, 198, 103765. [Google Scholar] [CrossRef]
- Sahani, N.; Ghosh, T. GIS-Based Spatial Prediction of Recreational Trail Susceptibility in Protected Area of Sikkim Himalaya Using Logistic Regression, Decision Tree and Random Forest Model. Ecol. Inform. 2021, 64, 101352. [Google Scholar] [CrossRef]
- Buchelt, A.; Adrowitzer, A.; Kieseberg, P.; Gollob, C.; Nothdurft, A.; Eresheim, S.; Tschiatschek, S.; Stampfer, K.; Holzinger, A. Exploring Artificial Intelligence for Applications of Drones in Forest Ecology and Management. For. Ecol. Manag. 2024, 551, 121530. [Google Scholar] [CrossRef]
- Peng, C.-Y.J.; Lee, K.L.; Ingersoll, G.M. An Introduction to Logistic Regression Analysis and Reporting. J. Educ. Res. 2002, 96, 3–14. [Google Scholar] [CrossRef]
- Lee, S.; Sambath, T. Landslide Susceptibility Mapping in the Damrei Romel Area, Cambodia Using Frequency Ratio and Logistic Regression Models. Environ. Geol. 2006, 50, 847–855. [Google Scholar] [CrossRef]
- Korea Forest Service Website. Available online: https://kfss.forest.go.kr/stat/ptl/main/main.do?CSRFToken=null (accessed on 7 May 2025).
- Korea Meteorological Administration Website. Available online: https://www.weather.go.kr/w/index.do (accessed on 7 May 2025).
- Busan City. 2024. Available online: https://www.busan.go.kr/eng/index (accessed on 7 May 2025).
- Yeo, W.-S. Promotion Tasks for the Designation of Geumjeongsan as a National Park in Busan; Busan Development Institute: 2019. Available online: https://www.dbpia.co.kr/journal/articleDetail?nodeId=NODE09228542 (accessed on 7 May 2025).
- Ministry of Environment Website (Land Cover Maps). Available online: https://www.me.go.kr/home/web/main.do (accessed on 7 May 2025).
- Marquet, O.; Mojica, L.; Fernández-Núñez, M.-B.; Maciejewska, M. Pathways to 15-Minute City Adoption: Can Our Understanding of Climate Policies’ Acceptability Explain the Backlash towards x-Minute City Programs? Cities 2024, 148, 104878. [Google Scholar] [CrossRef]
- Bruehler, G.; Sondergaard, M. GIS/GPS Trail Condition Inventories: A Virtual Toolbox for Trail Managers. In Proceedings of the Twenty-Fourth Annual ESRI User Conference, San Diego, CA, USA, 14–18 July 2004; pp. 9–13. [Google Scholar]
- Leung, Y.-F.; Marion, J.L. The Influence of Sampling Interval on the Accuracy of Trail Impact Assessment. Landsc. Urban. Plan. 1999, 43, 167–179. [Google Scholar] [CrossRef]
- Monz, C.A.; Marion, J.L.; Goonan, K.A.; Manning, R.E.; Wimpey, J.; Carr, C. Assessment and Monitoring of Recreation Impacts and Resource Conditions on Mountain Summits: Examples From the Northern Forest, USA. Mt. Res. Dev. 2010, 30, 332–343. [Google Scholar] [CrossRef]
- Nepal, S.K. Trail Impacts in Sagarmatha (Mt. Everest) National Park, Nepal: A Logistic Regression Analysis. Environ. Manag. 2003, 32, 312–321. [Google Scholar] [CrossRef]
- QGIS Development Team. QGIS Geographic Information System, Version 3.34; Open Source Geospatial Foundation Project: Beaverton, OR, USA, 2024; Available online: https://qgis.org (accessed on 7 May 2025).
- Neter, J.; Kutner, M.H.; Nachtsheim, C.J.; Wasserman, W. Applied Linear Statistical Models; Irwin Professional Publishing: Burr Ridge, IL, USA, 1996. [Google Scholar]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Shapley, L.S. A Value for N-Person Games. Contrib. Theory Games 1953, 2, 307–317. [Google Scholar]
- Lundberg, S.M.; Lee, S.-I. A Unified Approach to Interpreting Model Predictions. Adv. Neural Inf. Process Syst. 2017, 30, 4768–4777. [Google Scholar]
- Kim, H.; Kim, D. Changes in Urban Growth Patterns in Busan Metropolitan City, Korea: Population and Urbanized Areas. Land 2022, 11, 1319. [Google Scholar] [CrossRef]
- Bai, W.-P.; Cheng, S.-Q.; Guo, X.-Y.; Wang, Y.; Guo, Q.; Tan, C.-D. Oilfield Analogy and Productivity Prediction Based on Machine Learning: Field Cases in PL Oilfield, China. Pet. Sci. 2024, 21, 2554–2570. [Google Scholar] [CrossRef]
- Ding, X.; Feng, B.; Wu, J. The Influence of Two and Three-Dimensional Spatial Characteristics of Industrial Parks on the Emotional Well-Being of Employees: A Case Study of Shenzhen. Appl. Geogr. 2024, 171, 103367. [Google Scholar] [CrossRef]
- Abdulrashid, I.; Chiang, W.-C.; Sheu, J.-B.; Mammadov, S. An Interpretable Machine Learning Framework for Enhancing Road Transportation Safety. Transp. Res. E Logist. Transp. Rev. 2025, 195, 103969. [Google Scholar] [CrossRef]
- El Mokhtari, K.; Higdon, B.P.; Başar, A. Interpreting Financial Time Series with SHAP Values. In Proceedings of the 29th Annual International Conference on Computer Science and Software Engineering, Markham, ON, Canada, 4–6 November 2019; pp. 166–172. [Google Scholar]
- Lombardo, L.; Cama, M.; Conoscenti, C.; Märker, M.; Rotigliano, E. Binary Logistic Regression versus Stochastic Gradient Boosted Decision Trees in Assessing Landslide Susceptibility for Multiple-Occurring Landslide Events: Application to the 2009 Storm Event in Messina (Sicily, Southern Italy). Nat. Hazards 2015, 79, 1621–1648. [Google Scholar] [CrossRef]
- Ding, C.; Wang, D.; Ma, X.; Li, H. Predicting Short-Term Subway Ridership and Prioritizing Its Influential Factors Using Gradient Boosting Decision Trees. Sustainability 2016, 8, 1100. [Google Scholar] [CrossRef]
- Sachdeva, S.; Bhatia, T.; Verma, A.K. GIS-Based Evolutionary Optimized Gradient Boosted Decision Trees for Forest Fire Susceptibility Mapping. Nat. Hazards 2018, 92, 1399–1418. [Google Scholar] [CrossRef]
- Cohen, J. A Coefficient of Agreement for Nominal Scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Louppe, G.; Wehenkel, L.; Sutera, A.; Geurts, P. Understanding Variable Importances in Forests of Randomized Trees. Adv. Neural Inf. Process Syst. 2013, 26, 431–439. [Google Scholar]
- Hassan, S.U.; Ahamed, J.; Ahmad, K. Analytics of Machine Learning-Based Algorithms for Text Classification. Sustain. Oper. Comput. 2022, 3, 238–248. [Google Scholar] [CrossRef]
- Valero-Carreras, D.; Alcaraz, J.; Landete, M. Comparing Two SVM Models through Different Metrics Based on the Confusion Matrix. Comput. Oper. Res. 2023, 152, 106131. [Google Scholar] [CrossRef]
- Phillips, G.; Teixeira, H.; Kelly, M.G.; Salas Herrero, F.; Várbíró, G.; Lyche Solheim, A.; Kolada, A.; Free, G.; Poikane, S. Setting Nutrient Boundaries to Protect Aquatic Communities: The Importance of Comparing Observed and Predicted Classifications Using Measures Derived from a Confusion Matrix. Sci. Total Environ. 2024, 912, 168872. [Google Scholar] [CrossRef] [PubMed]
- Roberts, D.R.; Bahn, V.; Ciuti, S.; Boyce, M.S.; Elith, J.; Guillera-Arroita, G.; Hauenstein, S.; Lahoz-Monfort, J.J.; Schröder, B.; Thuiller, W.; et al. Cross-Validation Strategies for Data with Temporal, Spatial, Hierarchical, or Phylogenetic Structure. Ecography 2017, 40, 913–929. [Google Scholar] [CrossRef]
- Valavi, R.; Elith, J.; Lahoz-Monfort, J.J.; Guillera-Arroita, G. BlockCV: An r Package for Generating Spatially or Environmentally Separated Folds for k-Fold Cross-Validation of Species Distribution Models. Methods Ecol. Evol. 2019, 10, 225–232. [Google Scholar] [CrossRef]
- Tomczyk, A.M.; Ewertowski, M.W.; Creany, N.; Ancin-Murguzur, F.J.; Monz, C. The Application of Unmanned Aerial Vehicle (UAV) Surveys and GIS to the Analysis and Monitoring of Recreational Trail Conditions. Int. J. Appl. Earth Obs. Geoinf. 2023, 123, 103474. [Google Scholar] [CrossRef]
- Evju, M.; Hagen, D.; Jokerud, M.; Olsen, S.L.; Selvaag, S.K.; Vistad, O.I. Effects of Mountain Biking versus Hiking on Trails under Different Environmental Conditions. J. Environ. Manag. 2021, 278, 111554. [Google Scholar] [CrossRef]
- Meadema, F.; Marion, J.L.; Arredondo, J.; Wimpey, J. The Influence of Layout on Appalachian Trail Soil Loss, Widening, and Muddiness: Implications for Sustainable Trail Design and Management. J. Environ. Manag. 2020, 257, 109986. [Google Scholar] [CrossRef]
- Bodoque, J.M.; Ballesteros-Cánovas, J.A.; Rubiales, J.M.; Perucha, M.Á.; Nadal-Romero, E.; Stoffel, M. Quantifying Soil Erosion from Hiking Trail in a Protected Natural Area in the Spanish Pyrenees. Land. Degrad. Dev. 2017, 28, 2255–2267. [Google Scholar] [CrossRef]
- Marion, J.L. A Review and Synthesis of Recreation Ecology Research Supporting Carrying Capacity and Visitor Use Management Decisionmaking. J. For. 2016, 114, 339–351. [Google Scholar] [CrossRef]
- Olive, N.D.; Marion, J.L. The Influence of Use-Related, Environmental, and Managerial Factors on Soil Loss from Recreational Trails. J. Environ. Manag. 2009, 90, 1483–1493. [Google Scholar] [CrossRef]
- Hosmer Jr, D.W.; Lemeshow, S.; Sturdivant, R.X. Applied Logistic Regression; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Park, S.; Kim, J. Landslide Susceptibility Mapping Based on Random Forest and Boosted Regression Tree Models, and a Comparison of Their Performance. Appl. Sci. 2019, 9, 942. [Google Scholar] [CrossRef]
- Schratz, P.; Muenchow, J.; Iturritxa, E.; Richter, J.; Brenning, A. Hyperparameter Tuning and Performance Assessment of Statistical and Machine-Learning Algorithms Using Spatial Data. Ecol. Modell. 2019, 406, 109–120. [Google Scholar] [CrossRef]
- Marion, J.L.; Wimpey, J. Assessing the Influence of Sustainable Trail Design and Maintenance on Soil Loss. J. Environ. Manag. 2017, 189, 46–57. [Google Scholar] [CrossRef]
- Parker, T.S. Natural Surface Trails by Design: Physical and Human Design Essentials of Sustainable, Enjoyable Trails; Natureshape: Fatehpur, India, 2004. [Google Scholar]
- De Baets, S.; Poesen, J.; Reubens, B.; Wemans, K.; De Baerdemaeker, J.; Muys, B. Root Tensile Strength and Root Distribution of Typical Mediterranean Plant Species and Their Contribution to Soil Shear Strength. Plant Soil. 2008, 305, 207–226. [Google Scholar] [CrossRef]
- Reubens, B.; Poesen, J.; Danjon, F.; Geudens, G.; Muys, B. The Role of Fine and Coarse Roots in Shallow Slope Stability and Soil Erosion Control with a Focus on Root System Architecture: A Review. Trees-Struct. Funct. 2007, 21, 385–402. [Google Scholar] [CrossRef]
- Schwarz, M.; Lehmann, P.; Or, D. Quantifying Lateral Root Reinforcement in Steep Slopes—From a Bundle of Roots to Tree Stands. Earth Surf. Process Landf. 2010, 35, 354–367. [Google Scholar] [CrossRef]
- Kemppinen, J.; Niittynen, P.; Riihimäki, H.; Luoto, M. Modelling Soil Moisture in a High-Latitude Landscape Using LiDAR and Soil Data. Earth Surf. Process Landf. 2018, 43, 1019–1031. [Google Scholar] [CrossRef]
- Tomczyk, A.M.; Ewertowski, M.W.; White, P.C.L.; Kasprzak, L. A New Framework for Prioritising Decisions on Recreational Trail Management. Landsc. Urban. Plan. 2017, 167, 1–13. [Google Scholar] [CrossRef]
- Seutloali, K.E.; Dube, T.; Mutanga, O. Assessing and Mapping the Severity of Soil Erosion Using the 30-m Landsat Multispectral Satellite Data in the Former South African Homelands of Transkei. Phys. Chem. Earth Parts A/B/C 2017, 100, 296–304. [Google Scholar] [CrossRef]
- Liu, M.; Zhang, D.; Pietzarka, U.; Roloff, A. Assessing the Adaptability of Urban Tree Species to Climate Change Impacts: A Case Study in Shanghai. Urban. For. Urban. Green. 2021, 62, 127186. [Google Scholar] [CrossRef]
- National Geographic Information Institute. National Geographic Information Institute Website. Available online: https://www.ngii.go.kr (accessed on 7 May 2025).
- Ólafsdóttir, R.; Runnström, M.C. Assessing Hiking Trails Condition in Two Popular Tourist Destinations in the Icelandic Highlands. J. Outdoor Recreat. Tour. 2013, 3–4, 57–67. [Google Scholar] [CrossRef]
- Pal, S.; Debanshi, S. Influences of Soil Erosion Susceptibility toward Overloading Vulnerability of the Gully Head Bundhs in Mayurakshi River Basin of Eastern Chottanagpur Plateau. Environ. Dev. Sustain. 2018, 20, 1739–1775. [Google Scholar] [CrossRef]
- Marion, J.L.; Wimpey, J. Informal Trail Monitoring Protocols: Denali National Park and Preserve. Usgs 2011, 76. [Google Scholar] [CrossRef]
- Datta, P.S.; Schack-Kirchner, H. Erosion Relevant Topographical Parameters Derived from Different DEMs—A Comparative Study from the Indian Lesser Himalayas. Remote Sens. 2010, 2, 1941–1961. [Google Scholar] [CrossRef]
- Korea Forest Service. Korea Forest Service Website. Available online: https://www.forest.go.kr/kfsweb/kfs/idx/Index.do (accessed on 7 May 2025).
- Bratton, S.P.; Hickler, M.G.; Graves, J.H. Trail Erosion Patterns in Great Smoky Mountains National Park. Environ. Manag. 1979, 3, 431–445. [Google Scholar] [CrossRef]
- Hall, C.N.; Kuss, F.R. Vegetation Alteration along Trails in Shenandoah National Park, Virginia. Biol. Conserv. 1989, 48, 211–227. [Google Scholar] [CrossRef]
- European Space Agency. Sentinel-2 Satellite Imagery. Available online: https://browser.dataspace.copernicus.eu/ (accessed on 7 May 2025).
- Kim, H.W.; Kim, J.H.; Li, W.; Yang, P.; Cao, Y. Exploring the Impact of Green Space Health on Runoff Reduction Using NDVI. Urban For Urban Green 2017, 28, 81–87. [Google Scholar] [CrossRef]
- Liu, C.; White, M.; Newell, G. Measuring and Comparing the Accuracy of Species Distribution Models with Presence–Absence Data. Ecography 2011, 34, 232–243. [Google Scholar] [CrossRef]
- Finley, J.P. Tornado Predictions. Am. Meteorol. J. A Mon. Rev. Meteorol. Allied Branches Study (1884–1896) 1884, 1, 85. [Google Scholar]
- Fielding, A.H.; Bell, J.F. A Review of Methods for the Assessment of Prediction Errors in Conservation Presence/Absence Models. Environ. Conserv. 1997, 24, 38–49. [Google Scholar] [CrossRef]
- Daskalaki, S.; Kopanas, I.; Avouris, N. Evaluation of Classifiers for an Uneven Class Distribution Problem. Appl. Artif. Intell. 2006, 20, 381–417. [Google Scholar] [CrossRef]
- Bradley, A.P. The Use of the Area under the ROC Curve in the Evaluation of Machine Learning Algorithms. Pattern Recognit. 1997, 30, 1145–1159. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Non- Degraded | Degraded | Unsurveyed | ||
|---|---|---|---|---|---|
| Continuous | Elevation (m) | 552.7 | 561.8 | 494.9 | |
| Slope (Degrees) | 19.4 | 19.8 | 21.8 | ||
| Aspect (Degrees) | 188.7 | 210.9 | 195.1 | ||
| TSA (Degrees) | 39.4 | 45.5 | 44.4 | ||
| LS Factor | 29.0 | 12.7 | 18.2 | ||
| TWI | 9.1 | 9.6 | 9.2 | ||
| NDVI | 0.569 | 0.557 | 0.581 | ||
| Categorical | Vegetation Type | M (Mixed Forest of Conifers and Hardwoods) | 36 | 36 | 25,686 |
| D (Pine Forest) | 9 | 7 | 7460 | ||
| H (Hardwood Forest) | 1 | 13 | 18,193 | ||
| PR (Pinus rigida Forest) | - | 19 | 2506 | ||
| R (Non-Forested Area) | 8 | 13 | 2895 | ||
| Soil Type | SL (Sandy Loam) | 10 | 22 | 20,943 | |
| L (Loam) | 21 | 46 | 24,184 | ||
| SiL (Silt Loam) | - | - | 984 | ||
| Model | Accuracy | Precision | Recall | F1-Score | Cohen’s Kappa |
|---|---|---|---|---|---|
| Random Forest | 0.767 | 0.767 | 0.885 | 0.821 | 0.493 |
| Logistic Regression | 0.767 | 0.786 | 0.846 | 0.815 | 0.503 |
| Gradient Boosting | 0.791 | 0.774 | 0.923 | 0.842 | 0.539 |
| Model | Mean AUC-ROC | Standard Deviation | Min AUC | Max AUC | CV Coefficient * |
|---|---|---|---|---|---|
| Random Forest | 0.729 | 0.139 | 0.521 | 0.901 | 0.191 |
| Logistic Regression | 0.702 | 0.089 | 0.589 | 0.823 | 0.127 |
| Gradient Boosting | 0.732 | 0.136 | 0.534 | 0.912 | 0.186 |
| Feature | Mean Absolute SHAP a | Positive Effect Ratio b | Negative Effect Ratio c | Mean SHAP d |
|---|---|---|---|---|
| Vegetation Type | 0.104 | 0.394 | 0.606 | 0.010 |
| Elevation | 0.062 | 0.525 | 0.475 | −0.004 |
| TSA | 0.053 | 0.606 | 0.394 | 0.000 |
| TWI | 0.047 | 0.626 | 0.374 | 0.000 |
| LS | 0.046 | 0.505 | 0.495 | −0.002 |
| Aspect | 0.042 | 0.455 | 0.545 | −0.005 |
| Soil Texture | 0.030 | 0.697 | 0.303 | 0.000 |
| Slope | 0.028 | 0.545 | 0.455 | −0.001 |
| NDVI | 0.021 | 0.556 | 0.444 | −0.001 |
| Variables | Predicted Degradation Class | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| Pixel Count (%) | 5883 (10.2%) | 12,313 (21.3%) | 16,060 (27.8%) | 13,909 (24.1%) | 9563 (16.6%) | |
| Elevation (m) | 494.9 | 450.6 | 466.4 | 495.0 | 513.4 | |
| TSA (Degrees) | 48.4 | 51.2 | 43.1 | 38.2 | 44.9 | |
| TWI | 8.6 | 8.7 | 9.0 | 9.6 | 10.2 | |
| LS | 9.6 | 15.3 | 14.7 | 23.9 | 22.9 | |
| Aspect (Degrees) | 158.1 | 177.2 | 200.7 | 206.2 | 215.7 | |
| NDVI | 0.574 | 0.574 | 0.578 | 0.594 | 0.581 | |
| Slope (Degrees) | 22.6 | 25.4 | 21.8 | 20.2 | 18.7 | |
| Vegetation Type | M (Mixed Forest of Conifers and Hardwoods) | 5791 | 9013 | 6623 | 2727 | 1604 |
| D (Pine Forest) | - | 999 | 2708 | 2299 | 1470 | |
| H (Hardwood Forest) | - | 1668 | 5086 | 6522 | 4931 | |
| PR (Pinus rigida Forest) | - | 4 | 405 | 793 | 1323 | |
| Soil Texture | R (Non-Forested area) | 63 | 525 | 1028 | 1124 | 173 |
| SL (Sandy Loam) | 2291 | 4313 | 5478 | 4495 | 4398 | |
| L (Loam) | 2106 | 4802 | 6510 | 6854 | 3979 | |
| SiL (Silt Loam) | - | 135 | 147 | 274 | 428 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jo, H.; Kang, Y.; Son, S. Predicting Forest Trail Degradation Susceptibility Using GIS-Based Explainable Machine Learning. Forests 2025, 16, 1074. https://doi.org/10.3390/f16071074
Jo H, Kang Y, Son S. Predicting Forest Trail Degradation Susceptibility Using GIS-Based Explainable Machine Learning. Forests. 2025; 16(7):1074. https://doi.org/10.3390/f16071074
Chicago/Turabian StyleJo, Hyeryeon, Youngeun Kang, and Seungwoo Son. 2025. "Predicting Forest Trail Degradation Susceptibility Using GIS-Based Explainable Machine Learning" Forests 16, no. 7: 1074. https://doi.org/10.3390/f16071074
APA StyleJo, H., Kang, Y., & Son, S. (2025). Predicting Forest Trail Degradation Susceptibility Using GIS-Based Explainable Machine Learning. Forests, 16(7), 1074. https://doi.org/10.3390/f16071074