
A Digital Replica of a Marteloscope: A Technical and Educational Tool for Smart Forestry Management

 , ,
, ,  , and
, and
Abstract
1. Introduction
2. Materials and Methods
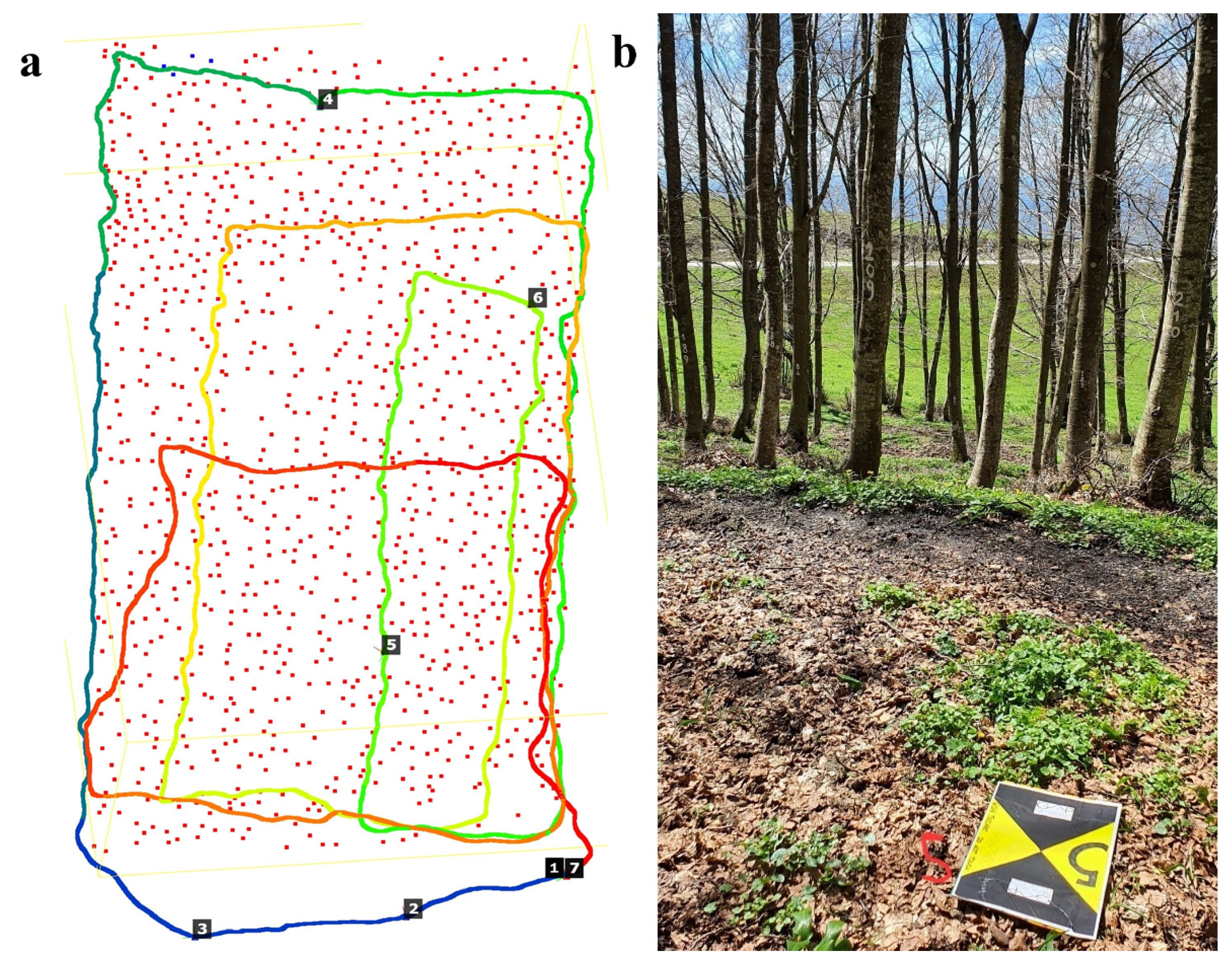
2.1. Study Area
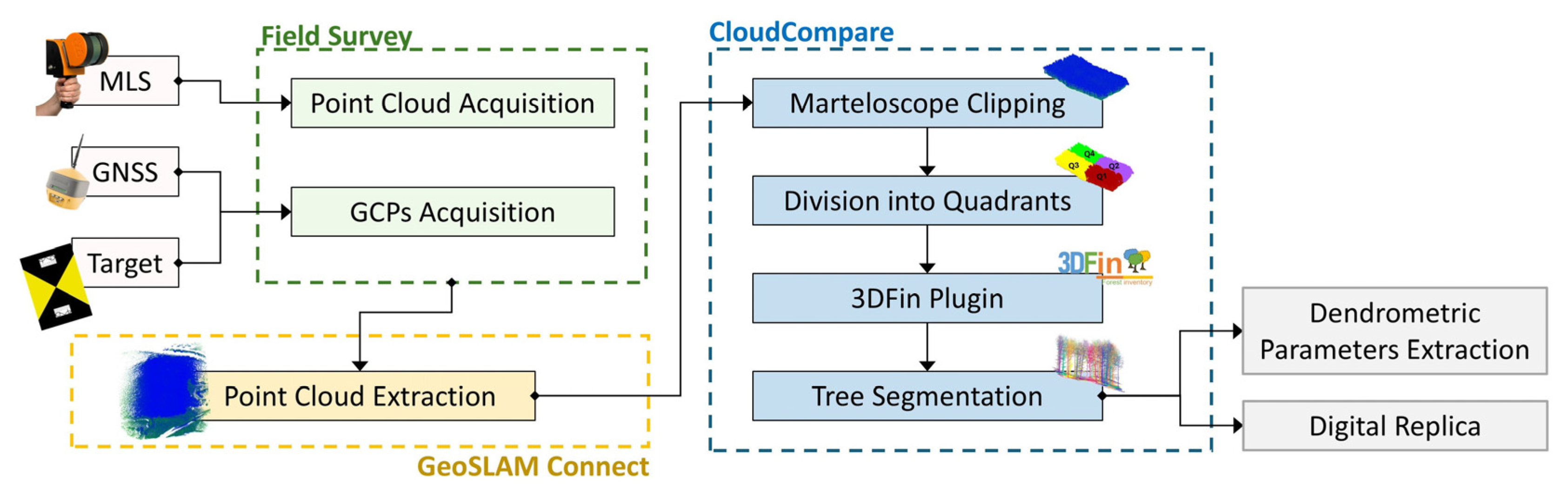
2.2. LiDAR Data Acquisition and Processing
2.3. Accuracy Evaluation and Tree Marking Simulation
3. Results
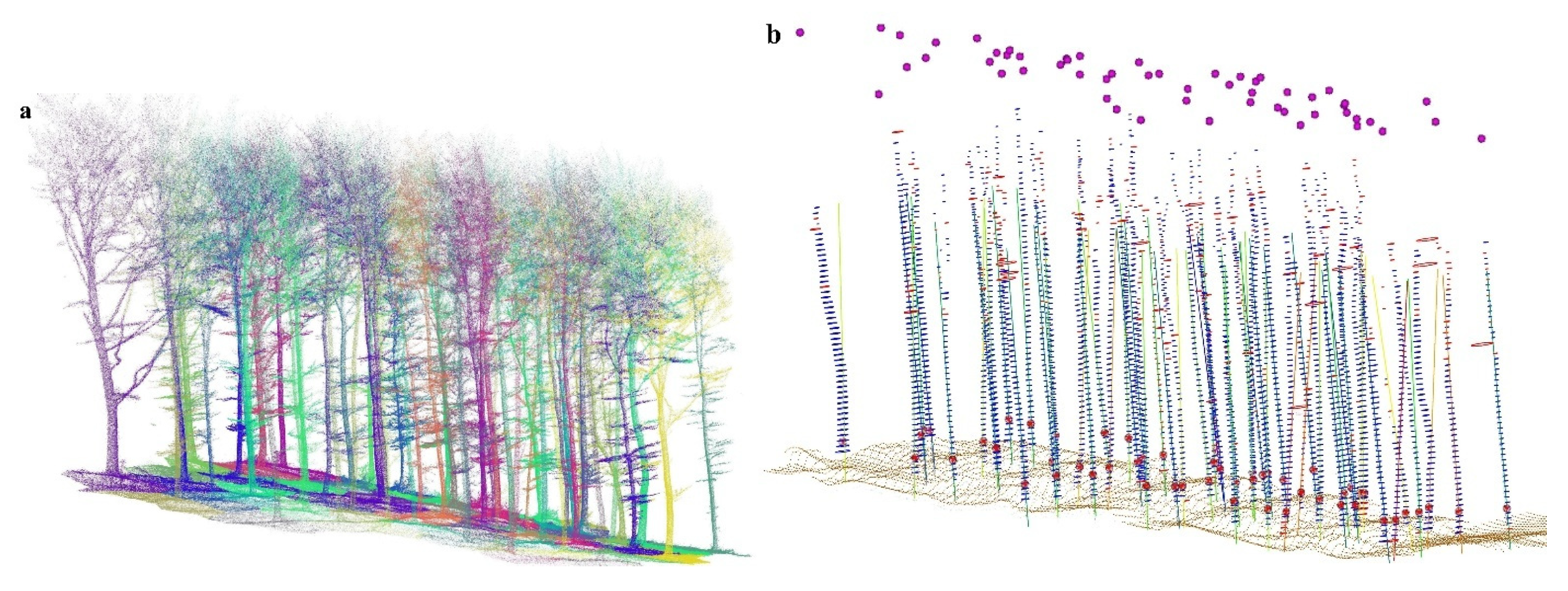
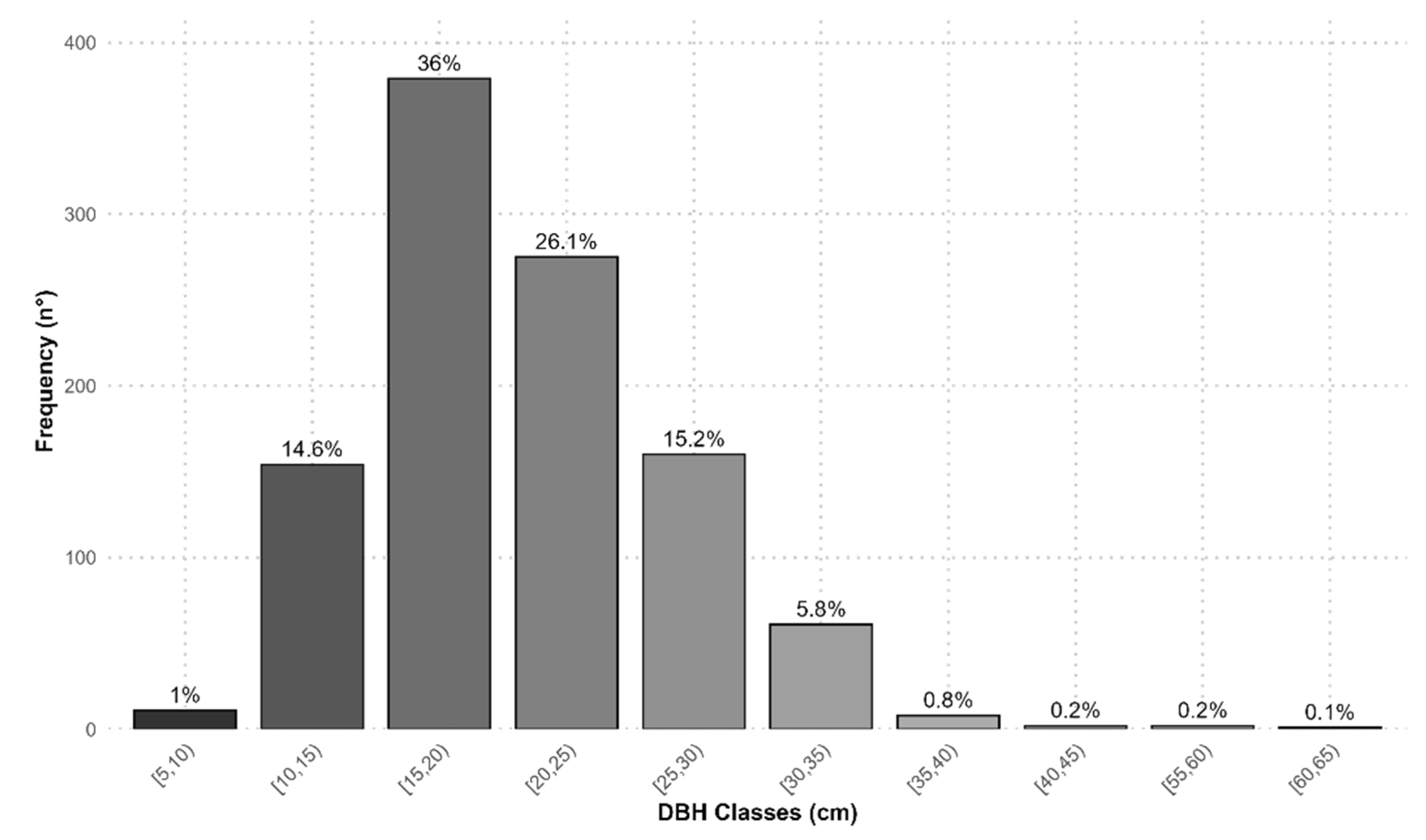
3.1. Tree Structural Parameters Extraction
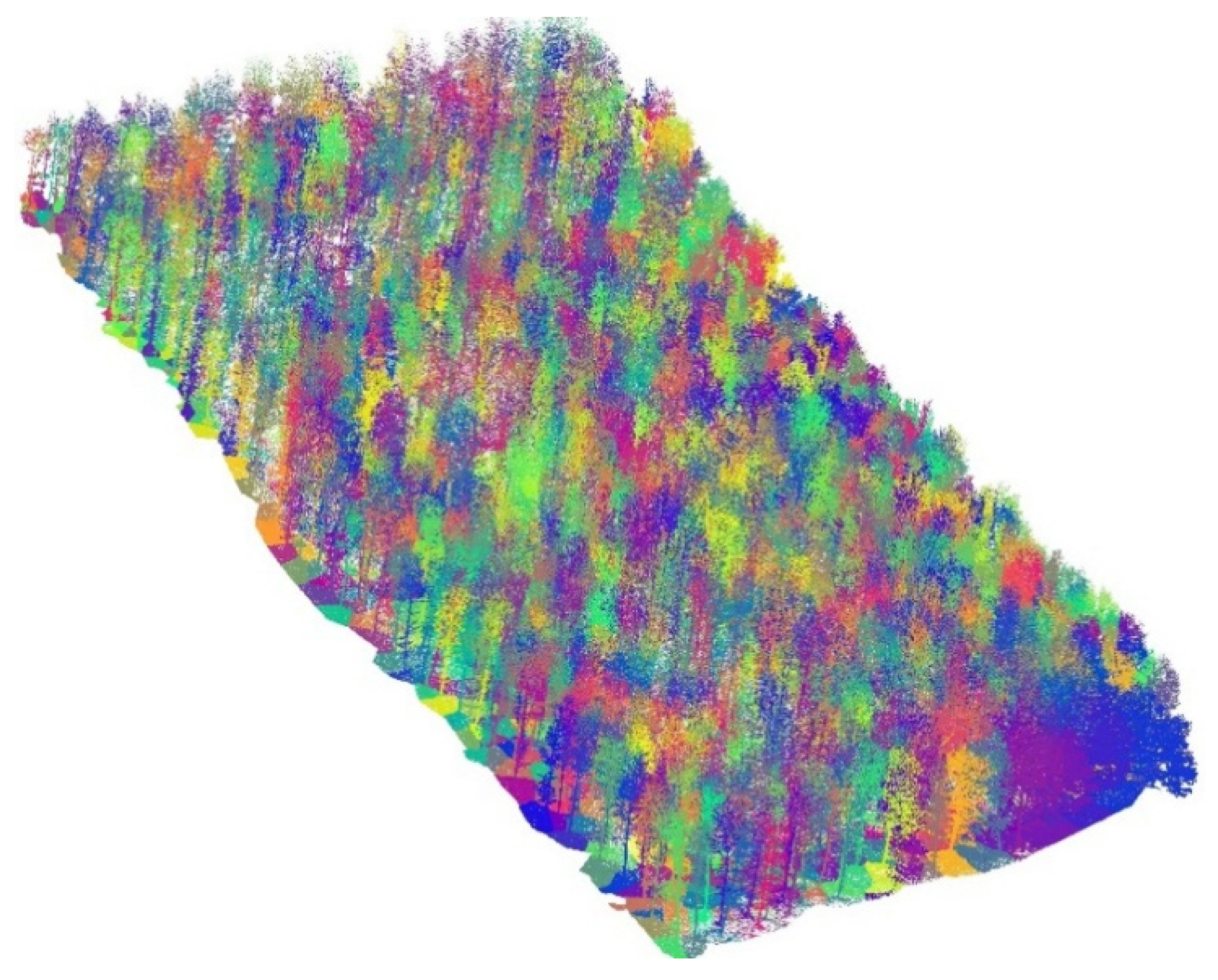
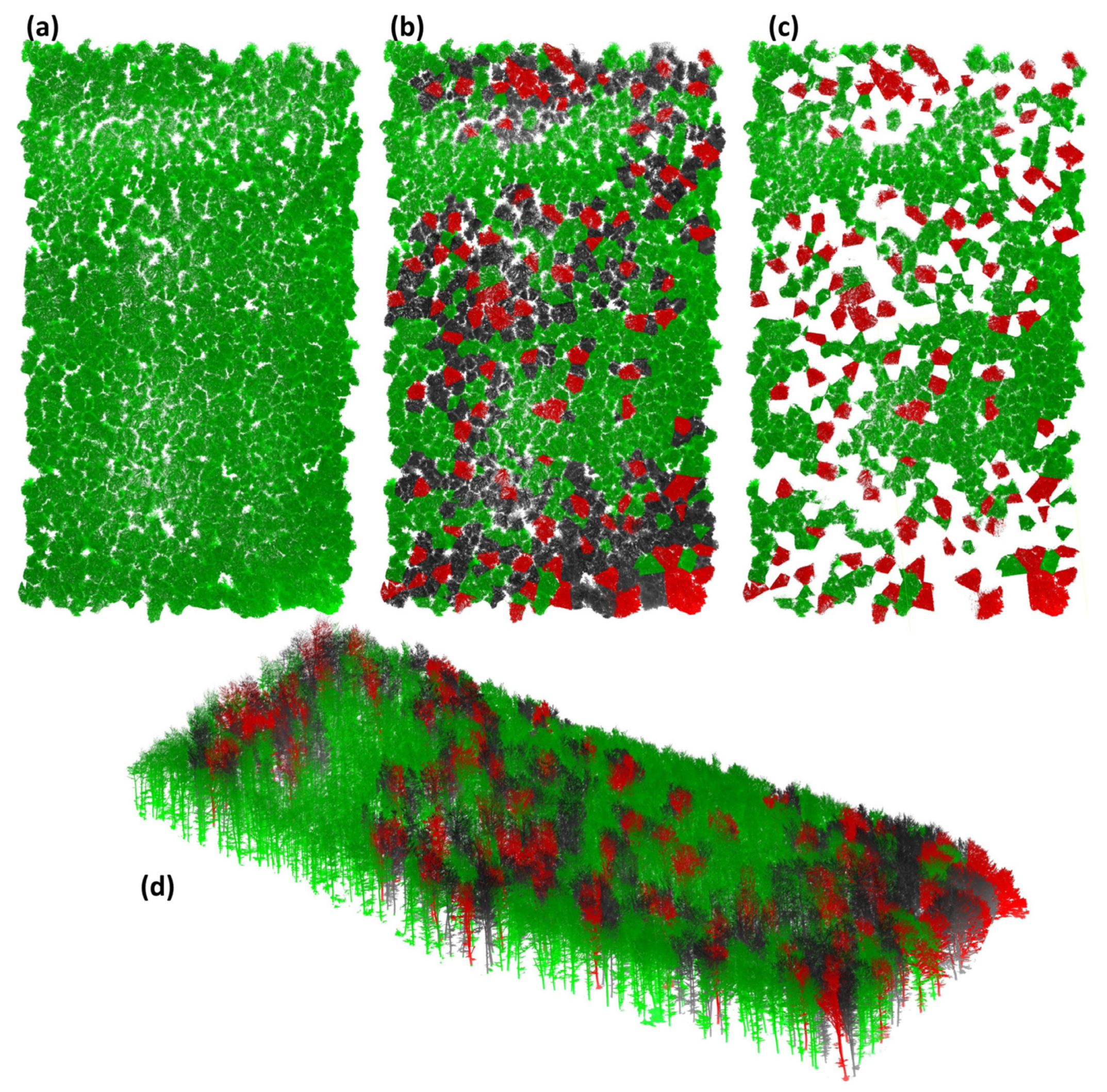
3.2. Three-Dimensional Digital Replica Marteloscope and Tree Marking Visualization
4. Discussion
4.1. Advanced Geomatic Devices for Smart Forestry Applications
4.2. Advantages of the Digital Replica Marteloscope
5. Conclusions and Future Directions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 3DFin Window | Variable | Q1 | Q2 | Q3 | Q4 |
|---|---|---|---|---|---|
| Base | upper_limit | 4 | 4 | 4 | 3.5 |
| lower_limit | 1.8 | 1.8 | 1.8 | 0.7 | |
| number_of_iterations | 3 | 3 | 2 | 2 | |
| Advanced | maximum_diameter | 2 | 1 | 1 | 1 |
| stem_search_diameter | 2 | 2 | 1 | 2 | |
| minimum_height | 0.3 | 0.3 | 0.3 | 0.3 | |
| maximum_height | 25 | 25 | 25 | 25 | |
| section_len | 0.2 | 0.2 | 0.2 | 0.2 | |
| section_wid | 0.05 | 0.05 | 0.05 | 0.05 | |
| Expert | res_xy_stripe | 0.02 | 0.02 | 0.02 | 0.02 |
| res_z_stripe | 0.02 | 0.02 | 0.02 | 0.02 | |
| number_of_points | 1000 | 1000 | 1000 | 1000 | |
| verticality_scale_stripe | 0.1 | 0.1 | 0.1 | 0.1 | |
| verticality_thresh_stripe | 0.7 | 0.7 | 0.7 | 0.7 | |
| height_range | 0.7 | 0.7 | 0.7 | 0.7 | |
| res_xy | 0.035 | 0.035 | 0.035 | 0.035 | |
| res_z | 0.035 | 0.035 | 0.035 | 0.035 | |
| minimum_points | 200 | 200 | 200 | 200 | |
| verticality_scale_stems | 0.1 | 0.1 | 0.1 | 0.1 | |
| verticality_thresh_stem | 0.7 | 0.7 | 0.7 | 0.7 | |
| maximum_d | 15 | 15 | 15 | 15 | |
| distance_to_axis | 1.5 | 1.5 | 1.5 | 1.5 | |
| res_heights | 0.03 | 0.03 | 0.03 | 0.03 | |
| maximum_dev | 25 | 25 | 25 | 25 | |
| number_points_section | 15 | 30 | 10 | 20 | |
| diameter_proportion | 0.5 | 0.5 | 0.5 | 0.5 | |
| minimum_diameter | 0.06 | 0.04 | 0.05 | 0.06 | |
| point_threshold | 5 | 5 | 5 | 5 | |
| point_distance | 0.02 | 0.02 | 0.02 | 0.02 | |
| number_sectors | 16 | 16 | 16 | 16 | |
| m_number_sectors | 9 | 6 | 8 | 9 | |
| circle_width | 0.02 | 0.02 | 0.02 | 0.02 | |
| circa | 200 | 200 | 200 | 200 | |
| p_interval | 0.01 | 0.01 | 0.01 | 0.01 | |
| axis_downstep | 0.5 | 0.5 | 0.5 | 0.5 | |
| axis_upstep | 10 | 10 | 10 | 10 | |
| res_ground | 0.035 | 0.035 | 0.03 | 0.02 | |
| min_points_ground | 2 | 2 | 2 | 2 | |
| res_cloth | 0.05 | 0.05 | 0.05 | 0.05 |
References
- Kreye, M.M.; Adams, D.C.; Ghimire, R.; Morse, W.; Stein, T.; Bowker, J.M. Forest Ecosystem Services: Cultural Values. In Trees At Work: United States Department of Agriculture Forest Service Southern Research Station General Technical Report SRS-226 November 2017 Economic Accounting for Forest Ecosystem Services in the US South; Southern Research Station: Asheville, NC, USA, 2017. [Google Scholar]
- Kosanic, A.; Petzold, J. A Systematic Review of Cultural Ecosystem Services and Human Wellbeing. Ecosyst. Serv. 2020, 45, 101168. [Google Scholar] [CrossRef]
- Baskent, E.Z. A Framework for Characterizing and Regulating Ecosystem Services in a Management Planning Context. Forests 2020, 11, 102. [Google Scholar] [CrossRef]
- Jenkins, M.; Schaap, B. Forest Ecosystem Services. Backgr. Anal. Study 2018, 2–41. [Google Scholar]
- Ali, A. Linking Forest Ecosystem Processes, Functions and Services under Integrative Social–Ecological Research Agenda: Current Knowledge and Perspectives. Sci. Total Environ. 2023, 892, 164768. [Google Scholar] [CrossRef]
- Harrison, P.A.; Berry, P.M.; Simpson, G.; Haslett, J.R.; Blicharska, M.; Bucur, M.; Dunford, R.; Egoh, B.; Garcia-Llorente, M.; Geamănă, N.; et al. Linkages between Biodiversity Attributes and Ecosystem Services: A Systematic Review. Ecosyst. Serv. 2014, 9, 191–203. [Google Scholar] [CrossRef]
- Sforza, F.; Ziesak, M.; Lingua, E.; Starke, M. Optimizing Tree Selection for Planning Cable Yarding Operations: A Multi-Objective Modelling Approach. For. Ecol. Manag. 2025, 578, 122489. [Google Scholar] [CrossRef]
- Sustainable Forest Management—ForestEurope 1998. Available online: https://foresteurope.org/workstreams/sustainable-forest-management/ (accessed on 22 April 2025).
- John, M.; Wirth, K.; Kaufmann, A.; Ertelt, H.; Frei, T. Forest Deliberations: Marteloscopes as Sites of Encounter between Climate Activists and Forest Managers. For. Policy Econ. 2024, 169, 103356. [Google Scholar] [CrossRef]
- Cosyns, H.; Kraus, D.; Krumm, F.; Schulz, T.; Pyttel, P. Reconciling the Tradeoff between Economic and Ecological Objectives in Habitat-Tree Selection: A Comparison between Students, Foresters, and Forestry Trainers. For. Sci. 2019, 65, 223–234. [Google Scholar] [CrossRef]
- Pommerening, A.; Pallarés Ramos, C.; Kędziora, W.; Haufe, J.; Stoyan, D. Rating Experiments in Forestry: How Much Agreement Is There in Tree Marking? PLoS ONE 2018, 13, e0194747. [Google Scholar] [CrossRef]
- EFI—Integrated+ Network. Available online: http://iplus.efi.int/marteloscopes-data.html (accessed on 8 December 2024).
- Kraus, D.; Schuck, A.; Krumm, F.; Bütler, R.; Cosyns, H.; Courbaud, B.; Larrieu, L.; Mergner, U.; Pyttel, P.; Varis, S. Seeing Is Building Better Understanding-the Integrate+ Marteloscopes; HAL Open Science Location: Lyon, France, 2018. [Google Scholar]
- Kadavý, J.; Kneiflová, J.; Kneifl, M.; Uherková, B. Using Marteloscope in Selection Forestry–Study Case from Pokojná Hora’ (Czech Republic). J. For. Sci. 2024, 70, 447–457. [Google Scholar] [CrossRef]
- Larrieu, L.; Paillet, Y.; Winter, S.; Bütler, R.; Kraus, D.; Krumm, F.; Lachat, T.; Michel, A.K.; Regnery, B.; Vandekerkhove, K. Tree Related Microhabitats in Temperate and Mediterranean European Forests: A Hierarchical Typology for Inventory Standardization. Ecol. Indic. 2018, 84, 194–207. [Google Scholar] [CrossRef]
- Kruse, L.; Erefur, C.; Westin, J.; Ersson, B.T.; Pommerening, A. Towards a Benchmark of National Training Requirements for Continuous Cover Forestry (CCF) in Sweden. Trees For. People 2023, 12, 100391. [Google Scholar] [CrossRef]
- Gollob, C.; Ritter, T.; Nothdurft, A. Forest Inventory with Long Range and High-Speed Personal Laser Scanning (PLS) and Simultaneous Localization and Mapping (SLAM) Technology. Remote Sens. 2020, 12, 1509. [Google Scholar] [CrossRef]
- Freißmuth, L.; Mattamala, M.; Chebrolu, N.; Schaefer, S.; Leutenegger, S.; Fallon, M. Online Tree Reconstruction and Forest Inventory on a Mobile Robotic System. arXiv 2024, arXiv:2403.17622. [Google Scholar]
- Coops, N.C.; Tompalski, P.; Goodbody, T.R.H.; Queinnec, M.; Luther, J.E.; Bolton, D.K.; White, J.C.; Wulder, M.A.; van Lier, O.R.; Hermosilla, T. Modelling Lidar-Derived Estimates of Forest Attributes over Space and Time: A Review of Approaches and Future Trends. Remote Sens. Environ. 2021, 260, 112477. [Google Scholar] [CrossRef]
- Singh, R.; Gehlot, A.; Vaseem Akram, S.; Kumar Thakur, A.; Buddhi, D.; Kumar Das, P. Forest 4.0: Digitalization of Forest Using the Internet of Things (IoT). J. King Saud. Univ.-Comput. Inf. Sci. 2022, 34, 5587–5601. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Nelson, R.F.; Næsset, E.; Ørka, H.O.; Coops, N.C.; Hilker, T.; Bater, C.W.; Gobakken, T. Lidar Sampling for Large-Area Forest Characterization: A Review. Remote Sens. Environ. 2012, 121, 196–209. [Google Scholar] [CrossRef]
- Balestra, M.; Marselis, S.; Sankey, T.T.; Cabo, C.; Liang, X.; Mokroš, M.; Peng, X.; Singh, A.; Stereńczak, K.; Vega, C. LiDAR Data Fusion to Improve Forest Attribute Estimates: A Review. Curr. For. Rep. 2024, 10, 281–297. [Google Scholar] [CrossRef]
- Kaartinen, E.; Dunphy, K.; Sadhu, A. LiDAR-Based Structural Health Monitoring: Applications in Civil Infrastructure Systems. Sensors 2022, 22, 4610. [Google Scholar] [CrossRef]
- Balestra, M.; Tonelli, E.; Vitali, A.; Urbinati, C.; Frontoni, E.; Pierdicca, R. Geomatic Data Fusion for 3D Tree Modeling: The Case Study of Monumental Chestnut Trees. Remote Sens. 2023, 15, 2197. [Google Scholar] [CrossRef]
- Herrero-Huerta, M.; Lindenbergh, R.; Rodríguez-Gonzálvez, P. Automatic Tree Parameter Extraction by a Mobile LiDAR System in an Urban Context. PLoS ONE 2018, 13, e0196004. [Google Scholar] [CrossRef] [PubMed]
- Stefanidou, A.; Gitas, I.Z.; Korhonen, L.; Stavrakoudis, D.; Georgopoulos, N. LiDAR-Based Estimates of Canopy Base Height for a Dense Uneven-Aged Structured Forest. Remote Sens. 2020, 12, 1565. [Google Scholar] [CrossRef]
- Di Stefano, F.; Chiappini, S.; Gorreja, A.; Balestra, M.; Pierdicca, R. Mobile 3D Scan LiDAR: A Literature Review. Geomat. Nat. Hazards Risk 2021, 12, 2387–2429. [Google Scholar] [CrossRef]
- Dash, J.; Pont, D.; Brownlie, R.; Dunningham, A.; Watt, M.; Pearse, G. Remote Sensing for Precision Forestry. N. Z. J. For. 2016, 60, 15–24. [Google Scholar]
- Čeňava, J.; Tuček, J.; Chudá, J.; Koreň, M. Mobile Laser Scanning Data Collected under a Forest Canopy with GNSS/INS-Positioned Systems: Possibilities of Processability Improvements. Remote Sens. 2024, 16, 1734. [Google Scholar] [CrossRef]
- Murtiyoso, A.; Holm, S.; Riihimäki, H.; Krucher, A.; Griess, H.; Griess, V.C.; Schweier, J. Virtual Forests: A Review on Emerging Questions in the Use and Application of 3D Data in Forestry. Int. J. For. Eng. 2024, 35, 29–42. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppä, J.; Kaartinen, H.; Lehtomäki, M.; Pyörälä, J.; Pfeifer, N.; Holopainen, M.; Brolly, G.; Francesco, P.; Hackenberg, J. International Benchmarking of Terrestrial Laser Scanning Approaches for Forest Inventories. ISPRS J. Photogramm. Remote Sens. 2018, 144, 137–179. [Google Scholar] [CrossRef]
- Bienert, A.; Georgi, L.; Kunz, M.; Maas, H.-G.; Von Oheimb, G. Comparison and Combination of Mobile and Terrestrial Laser Scanning for Natural Forest Inventories. Forests 2018, 9, 395. [Google Scholar] [CrossRef]
- Aijazi, A.K.; Checchin, P.; Malaterre, L.; Trassoudaine, L. Automatic Detection and Parameter Estimation of Trees for Forest Inventory Applications Using 3D Terrestrial LiDAR. Remote Sens. 2017, 9, 946. [Google Scholar] [CrossRef]
- Krůček, M.; Král, K.; Cushman, K.C.; Missarov, A.; Kellner, J.R. Supervised Segmentation of Ultra-High-Density Drone Lidar for Large-Area Mapping of Individual Trees. Remote Sens. 2020, 12, 3260. [Google Scholar] [CrossRef]
- LiDAR360. Available online: https://www.greenvalleyintl.com/LiDAR360 (accessed on 19 December 2024).
- Laino, D.; Cabo, C.; Prendes, C.; Janvier, R.; Ordonez, C.; Nikonovas, T.; Doerr, S.; Santin, C. 3DFin: A Software for Automated 3D Forest Inventories from Terrestrial Point Clouds. For. An. Int. J. For. Res. 2024, 97, 479–496. [Google Scholar] [CrossRef]
- Qiu, H.; Zhang, H.; Lei, K.; Zhang, H.; Hu, X. Forest Digital Twin: A New Tool for Forest Management Practices Based on Spatio-Temporal Data, 3D Simulation Engine, and Intelligent Interactive Environment. Comput. Electron. Agric. 2023, 215, 108416. [Google Scholar] [CrossRef]
- Grieves, M. Digital Twin: Manufacturing Excellence through Virtual Factory Replication. White Pap. 2014, 1, 1–7. [Google Scholar]
- Buonocore, L.; Yates, J.; Valentini, R. A Proposal for a Forest Digital Twin Framework and Its Perspectives. Forests 2022, 13, 498. [Google Scholar] [CrossRef]
- Onwude, D.; Cronje, P.; North, J.; Defraeye, T. Digital Replica to Unveil the Impact of Growing Conditions on Orange Postharvest Quality. Sci. Rep. 2024, 14, 14437. [Google Scholar] [CrossRef]
- Singh, M.; Srivastava, R.; Fuenmayor, E.; Kuts, V.; Qiao, Y.; Murray, N.; Devine, D. Applications of Digital Twin across Industries: A Review. Appl. Sci. 2022, 12, 5727. [Google Scholar] [CrossRef]
- Nitoslawski, S.A.; Wong-Stevens, K.; Steenberg, J.W.N.; Witherspoon, K.; Nesbitt, L.; Konijnendijk van den Bosch, C.C. The Digital Forest: Mapping a Decade of Knowledge on Technological Applications for Forest Ecosystems. Earths Future 2021, 9, e2021EF002123. [Google Scholar] [CrossRef]
- Giannetti, F.; Passarino, L.; Aleandri, G.; Borghi, C.; Vangi, E.; Anzilotti, S.; Raddi, S.; Chirici, G.; Travaglini, D.; Maltoni, A.; et al. Efficiency of Mobile Laser Scanning for Digital Marteloscopes for Conifer Forests in the Mediterranean Region. Forests 2024, 15, 2202. [Google Scholar] [CrossRef]
- Balestra, M.; Cabo, C.; Murtiyoso, A.; Vitali, A.; Alvarez-Taboada, F.; Cantero-Amiano, A.; Bolaños, R.; Laino, D.; Pierdicca, R. Advancing Forest Inventory: A Comparative Study of Low-Cost MLS Lidar Device with Professional Laser Scanners. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2024, XLVIII-2/W8-2024, 9–15. [Google Scholar] [CrossRef]
- Murtiyoso, A.; Cabo, C.; Singh, A.; Obaya, D.P.; Cherlet, W.; Stoddart, J.; Fol, C.R.; Beloiu Schwenke, M.; Rehush, N.; Stereńczak, K.; et al. A Review of Software Solutions to Process Ground-Based Point Clouds in Forest Applications. Curr. For. Rep. 2024, 10, 401–419. [Google Scholar] [CrossRef]
- Kushwaha, S.K.P.; Singh, A.; Jain, K.; Cabo, C.; Mokros, M. Accuracy Assessment of Stem Classification Obtained from Forest Point Cloud Using FSCT Algorithm. In Proceedings of the Institute of Electrical and Electronics Engineers (IEEE), Pasadena, CA, USA, 20 October 2023; pp. 4447–4450. [Google Scholar]
- Liang, X.; Kukko, A.; Balenovic, I.; Saarinen, N.; Junttila, S.; Kankare, V.; Holopainen, M.; Mokros, M.; Surovy, P.; Kaartinen, H.; et al. Close-Range Remote Sensing of Forests: The State of the Art, Challenges, and Opportunities for Systems and Data Acquisitions. IEEE Geosci. Remote Sens. Mag. 2022, 10, 32–71. [Google Scholar] [CrossRef]
- Mokroš, M.; Liang, X.; Surový, P.; Valent, P.; Čerňava, J.; Chudý, F.; Tunák, D.; Saloň, Š.; Merganič, J. Evaluation of Close-Range Photogrammetry Image Collection Methods for Estimating Tree Diameters. ISPRS Int. J. Geoinf. 2018, 7, 93. [Google Scholar] [CrossRef]
- Holm, S.; Schweier, J. Virtual Forests for Decision Support and Stakeholder Communication. Environ. Model. Softw. 2024, 180, 106159. [Google Scholar] [CrossRef]
- FieldMap Software and Device. Available online: https://www.fieldmap.cz/ (accessed on 19 December 2024).
- TruPulse 360i. Available online: https://lasertech.com/product/trupulse-360i/ (accessed on 19 December 2024).
- Hijmans, R.J.; Barbosa, M.; Bivand, R.; Brown, A.; Chirico, M.; Cordano, E.; Dyba, K.; Pebesma, E.; Rowlingson, B.; Sumner, M.D. Terra: Spatial Data Analysis 2023. Available online: https://cran.r-project.org/web/packages/terra/index.html (accessed on 27 April 2025).
- Cameron, A.D. Importance of Early Selective Thinning in the Development of Long-term Stand Stability and Improved Log Quality: A Review. Forestry 2002, 75, 25–35. [Google Scholar] [CrossRef]
- Chiappini, S.; Pierdicca, R.; Malandra, F.; Tonelli, E.; Malinverni, E.S.; Urbinati, C.; Vitali, A. Comparing Mobile Laser Scanner and Manual Measurements for Dendrometric Variables Estimation in a Black Pine (Pinus Nigra Arn.) Plantation. Comput. Electron. Agric. 2022, 198, 107069. [Google Scholar] [CrossRef]
- Neudam, L.; Annighöfer, P.; Seidel, D. Exploring the Potential of Mobile Laser Scanning to Quantify Forest Structural Complexity. Front. Remote Sens. 2022, 3, 861337. [Google Scholar] [CrossRef]
- Dorji, Y.; Schuldt, B.; Neudam, L.; Dorji, R.; Middleby, K.; Isasa, E.; Körber, K.; Ammer, C.; Annighöfer, P.; Seidel, D. Three-Dimensional Quantification of Tree Architecture from Mobile Laser Scanning and Geometry Analysis. Trees-Struct. Funct. 2021, 35, 1385–1398. [Google Scholar] [CrossRef]
- Ghamisi, P.; Rasti, B.; Yokoya, N.; Wang, Q.; Hofle, B.; Bruzzone, L.; Bovolo, F.; Chi, M.; Anders, K.; Gloaguen, R. Multisource and Multitemporal Data Fusion in Remote Sensing: A Comprehensive Review of the State of the Art. IEEE Geosci. Remote Sens. Mag. 2019, 7, 6–39. [Google Scholar] [CrossRef]
- Puliti, S.; Lines, E.R.; Müllerová, J.; Frey, J.; Schindler, Z.; Straker, A.; Allen, M.J.; Winiwarter, L.; Rehush, N.; Hristova, H.; et al. Benchmarking Tree Species Classification from Proximally Sensed Laser Scanning Data: Introducing the FOR-species20K Dataset. Methods Ecol. Evol. 2025, 16, 801–818. [Google Scholar] [CrossRef]
- Jurjević, L.; Liang, X.; Gašparović, M.; Balenović, I. Is Field-Measured Tree Height as Reliable as Believed–Part II, A Comparison Study of Tree Height Estimates from Conventional Field Measurement and Low-Cost Close-Range Remote Sensing in a Deciduous Forest. ISPRS J. Photogramm. Remote Sens. 2020, 169, 227–241. [Google Scholar] [CrossRef]
- Wagner, S.; Angerschmid, A.; Saranti, A.; Gollob, C.; Ritter, T.; Krassnitzer, R.; Tockner, A.; Witzmann, S.; Holzinger, A.; Stampfer, K.; et al. Automatic Detection of Color Markings and Numbers on Trees in Point Clouds from Personal Laser Scanning (PLS) and Terrestrial Laser Scanning (TLS). Ecol. Inform. 2024, 82, 102709. [Google Scholar] [CrossRef]
- Chudá, J.; Výbošťok, J.; Tomaštík, J.; Chudý, F.; Tunák, D.; Skladan, M.; Tuček, J.; Mokroš, M. Prompt Mapping Tree Positions with Handheld Mobile Scanners Based on SLAM Technology. Land 2024, 13, 93. [Google Scholar] [CrossRef]
- Del Perugia, B.; Giannetti, F.; Chirici, G.; Travaglini, D. Influence of Scan Density on the Estimation of Single-Tree Attributes by Hand-Held Mobile Laser Scanning. Forests 2019, 10, 277. [Google Scholar] [CrossRef]
- Kuželka, K.; Surový, P. Noise Analysis for Unbiased Tree Diameter Estimation from Personal Laser Scanning Data. Remote Sens. 2024, 16, 1261. [Google Scholar] [CrossRef]
- de Simone, L.; Fanfarillo, E.; Maccherini, S.; Fiaschi, T.; Alfonso, G.; Angelini, F.; Garabini, M.; Angiolini, C. One Small Step for a Robot, One Giant Leap for Habitat Monitoring: A Structural Survey of EU Forest Habitats with Robotically-Mounted Mobile Laser Scanning (RMLS). Ecol. Indic. 2024, 160, 111882. [Google Scholar] [CrossRef]
- Döllner, J.; de Amicis, R.; Burmeister, J.-M.; Richter, R. Forests in the Digital Age: Concepts and Technologies for Designing and Deploying Forest Digital Twins. In Proceedings of the 28th International ACM Conference on 3D Web Technology, San Sebastian, Spain, 9–11 October 2023; pp. 1–12. [Google Scholar]
- O’Brien, L.; Derks, J.; Schuck, A. The Use of Marteloscopes in Science; A Review of Past Research and Suggestions for Further Application; European Forest Institue: Joensuu, Finland, 2022. [Google Scholar]
- Waeber, P.O.; Melnykovych, M.; Riegel, E.; Chongong, L.V.; Lloren, R.; Raher, J.; Reibert, T.; Zaheen, M.; Soshenskyi, O.; Garcia, C.A. Fostering Innovation, Transition, and the Reconstruction of Forestry: Critical Thinking and Transdisciplinarity in Forest Education with Strategy Games. Forests 2023, 14, 1646. [Google Scholar] [CrossRef]
- Wielgosz, M.; Puliti, S.; Xiang, B.; Schindler, K.; Astrup, R. SegmentAnyTree: A Sensor and Platform Agnostic Deep Learning Model for Tree Segmentation Using Laser Scanning Data. arXiv 2024, arXiv:2401.15739. [Google Scholar] [CrossRef]
- Xiang, B.; Wielgosz, M.; Kontogianni, T.; Peters, T.; Puliti, S.; Astrup, R.; Schindler, K. Automated Forest Inventory: Analysis of High-Density Airborne LiDAR Point Clouds with 3D Deep Learning. Remote Sens. Environ. 2024, 305, 114078. [Google Scholar] [CrossRef]
- Zürcher, R.; Zhao, J.; Lau Sarmiento, A.; Brede, B.; Klippel, A. Advancing Forest Monitoring and Assessment through Immersive Virtual Reality. Agil. GIScience Ser. 2023, 4, 15. [Google Scholar] [CrossRef]
- Sitompul, T.A.; Wallmyr, M. Using Augmented Reality to Improve Productivity and Safety for Heavy Machinery Operators: State of the Art. In Proceedings of the 17th International Conference on Virtual-Reality Continuum and Its Applications in Industry, Brisbane, QLD, Australia, 14–16 November 2019; pp. 1–9. [Google Scholar]
- Lilligreen, G.; Wiebel, A. Near and Far Interaction for Outdoor Augmented Reality Tree Visualization and Recommendations on Designing Augmented Reality for Use in Nature. SN Comput. Sci. 2023, 4, 248. [Google Scholar] [CrossRef]
- Jaung, W. Digital Forest Recreation in the Metaverse: Opportunities and Challenges. Technol. Forecast. Soc. Change 2022, 185, 122090. [Google Scholar] [CrossRef]



| MLS Tree Metrics | Bias | RMSD | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Q | N° Trees | Mean Slope (°) | Roughness Index | DBH Average [SD] (cm) | TH Average [SD] (m) | DBH (cm) | TH (m) | DBH (cm) | TH (m) | ||
| abs. | abs. | abs. | % | abs. | % | ||||||
| Q1 | 254 | 23 | 0.09 | 21.93 [−0.12] | 16.34 [+0.91] | 0.12 | −0.83 | 2.96 | 13.57 | 2.64 | 15.30 |
| Q2 | 258 | 22 | 0.08 | 21.37 [−0.19] | 16.05 [+1.39] | 0.19 | −1.70 | 1.72 | 8.14 | 2.96 | 16.99 |
| Q3 | 304 | 31 | 0.12 | 19.13 [−0.39] | 14.21 [+1.92] | 0.40 | −0.28 | 2.81 | 14.99 | 1.87 | 11.61 |
| Q4 | 271 | 27 | 0.10 | 19.82 [−0.17] | 14.65 [+0.80] | 0.16 | −0.09 | 1.72 | 8.76 | 1.66 | 10.77 |
| Total | 1087 | 20.51 [−0.22] | 15.27 [+1.44] | 0.22 | −0.74 | 2.38 | 11.74 | 2.42 | 14.48 | ||
| Stand Parameters | Pre-Thinning | Δ | Post-Thinning |
|---|---|---|---|
| Trees/ha (N) | 1087 | 328 | 759 |
| Trees/ha (%) | 100 | 30 | 70 |
| Basal area (m2/ha) | 37.75 [+0.58] | 11.96 [+0.37] | 25.79 [+0.21] |
| Basal area (%) | 100 | 31.68 [+0.52] | 68.32 [−0.52] |
| Growing Stock Volume (m3/ha) | 292.94 [+23.05] | 94.82 [+7.86] | 198.12 [+15.19] |
| Growing Stock Volume (%) | 100 | 32.36 [+0.14] | 67.63 [−0.13] |
| DBH average (cm) | 20.51 [+0.63] | 0.33 [−0.14] | 20.18 [+0.77] |
| TH average (m) | 15.27 [+1.05] | 0.19 [−0.18] | 15.08 [+1.23] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Balestra, M.; Tonelli, E.; Lizzi, L.; Pierdicca, R.; Urbinati, C.; Vitali, A. A Digital Replica of a Marteloscope: A Technical and Educational Tool for Smart Forestry Management. Forests 2025, 16, 820. https://doi.org/10.3390/f16050820
Balestra M, Tonelli E, Lizzi L, Pierdicca R, Urbinati C, Vitali A. A Digital Replica of a Marteloscope: A Technical and Educational Tool for Smart Forestry Management. Forests. 2025; 16(5):820. https://doi.org/10.3390/f16050820
Chicago/Turabian StyleBalestra, Mattia, Enrico Tonelli, Loris Lizzi, Roberto Pierdicca, Carlo Urbinati, and Alessandro Vitali. 2025. "A Digital Replica of a Marteloscope: A Technical and Educational Tool for Smart Forestry Management" Forests 16, no. 5: 820. https://doi.org/10.3390/f16050820
APA StyleBalestra, M., Tonelli, E., Lizzi, L., Pierdicca, R., Urbinati, C., & Vitali, A. (2025). A Digital Replica of a Marteloscope: A Technical and Educational Tool for Smart Forestry Management. Forests, 16(5), 820. https://doi.org/10.3390/f16050820