
Simulation-Based Correction of Geolocation Errors in GEDI Footprint Positions Using Monte Carlo Approach

 , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Data Acquisition and Preprocessing
2.2.1. Airborne LiDAR Data
2.2.2. GEDI V002 Data
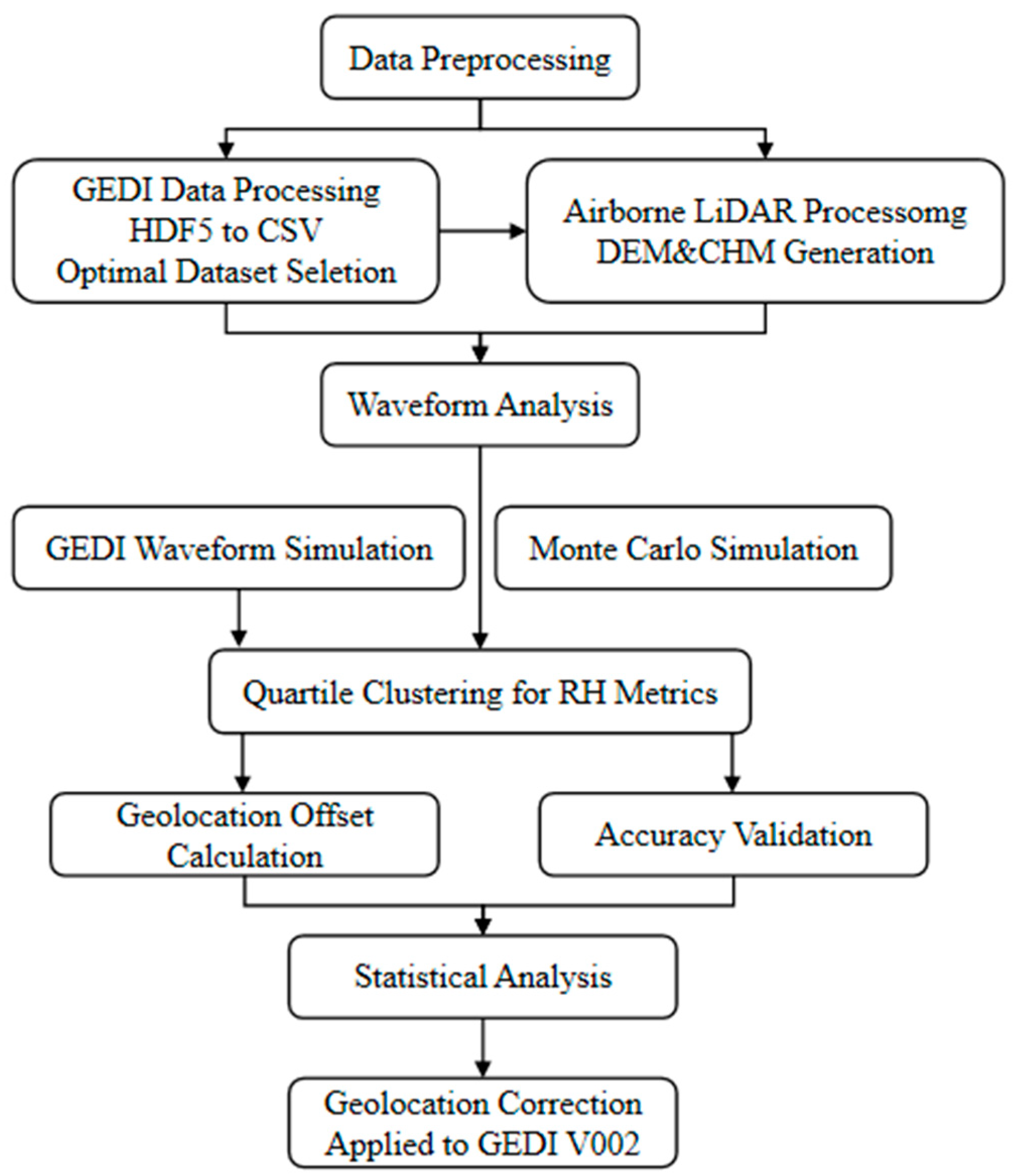
2.3. Method
2.3.1. Data Preprocessing
- (1)
- ALS Data
- (2)
- GEDI Data
2.3.2. Algorithm Selection for GEDI Data
- (1)
- AmpSim: This algorithm simulates the waveform amplitude using a simple sine wave model, primarily focused on generating a synthetic representation of the waveform.
- (2)
- AmpSDE: Similar to AmpSim, but with an additional smoothing operation applied to the waveform for better fitting to surface features, particularly in dense vegetation areas.
- (3)
- WavHgt: This algorithm estimates the surface height by analyzing the peak of the waveform and adjusting for vegetation interference, making it useful for areas with complex canopy structures.
- (4)
- RH: The Relative Height algorithm extracts vegetation height by calculating the difference between the ground surface and canopy return points, making it particularly effective for canopy height estimation.
- (5)
- AnomHeight: This algorithm focuses on identifying anomalous waveform behaviors, particularly in areas with mixed vegetation types or significant topographic variations. It provides a robust measure of canopy height with high sensitivity.
- (6)
- Stat: A statistical approach that processes waveforms based on predefined statistical models, aiming for broad applicability across diverse environments and vegetation types.
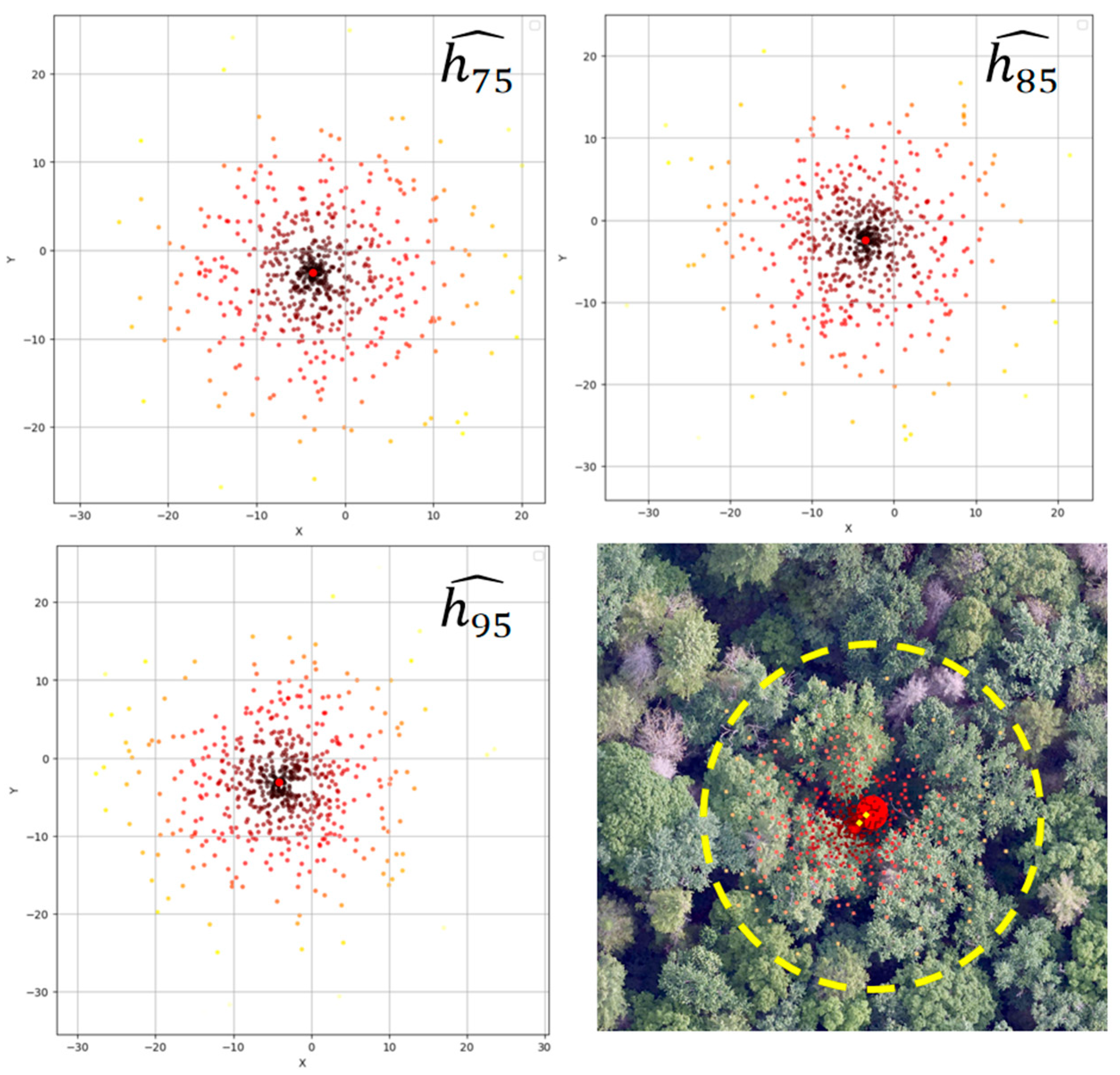
2.3.3. Monte Carlo Simulation
2.3.4. GEDI Geolocation Offset
2.3.5. Accuracy Validation
3. Results
3.1. The Influence of GEDI Geolocation Uncertainty on Forest Canopy Height Estimation
3.2. Impact of GEDI Geolocation Offset on Forest Height Extraction
3.3. GEDI Forest Height Inversion
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, C.; Wu, J.; Zhang, F.; Huang, X. Forest Carbon Sinks in Chinese Provinces and Their Impact on Sustainable Development Goals. Forests 2025, 16, 83. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, M.; Zhou, S.; Huang, Y. Research on the Spatiotemporal Evolution and Driving Factors of Forest Carbon Sink Increment—Based on Data Envelopment Analysis and Production Theoretical Decomposition Model. Forests 2025, 16, 104. [Google Scholar] [CrossRef]
- Li, Y.; Dan, L.; Peng, J.; Yang, Q.; Yang, F. Increase in the variability of terrestrial carbon uptake in response to enhanced future ENSO modulation. Atmos. Ocean. Sci. Lett. 2025, 18, 100508. [Google Scholar] [CrossRef]
- Bustamante, M.M.; Roitman, I.; Aide, T.M.; Alencar, A.; Anderson, L.O.; Aragao, L.; Asner, G.P.; Barlow, J.; Berenguer, E.; Chambers, J.; et al. Toward an integrated monitoring framework to assess the effects of tropical forest degradation and recovery on carbon stocks and biodiversity. Glob. Change Biol. 2016, 22, 92–109. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Zhang, Y.; Li, F.; Gao, W.; Guo, F.; Li, Z.; Yang, Z. Regional mangrove vegetation carbon stocks predicted integrating UAV-LiDAR and satellite data. J. Environ. Manag. 2024, 368, 122101. [Google Scholar] [CrossRef] [PubMed]
- Shugart, H.H.; Saatchi, S.; Hall, F.G. Importance of structure and its measurement in quantifying function of forest ecosystems. J. Geophys. Res. Biogeosci. 2010, 115, 1–16. [Google Scholar] [CrossRef]
- LaRue, E.A.; Hardiman, B.S.; Elliott, J.M.; Fei, S. Structural diversity as a predictor of ecosystem function. Environ. Res. Lett. 2019, 14, 114011. [Google Scholar] [CrossRef]
- Xi, Y.; Tian, Q.; Zhang, W.; Zhang, Z.; Tong, X.; Brandt, M.; Fensholt, R. Quantifying understory vegetation density using multi-temporal Sentinel-2 and GEDI LiDAR data. GISci. Remote Sens. 2022, 59, 2068–2083. [Google Scholar] [CrossRef]
- Guo, Q.; Du, S.; Jiang, J.; Guo, W.; Zhao, H.; Yan, X.; Zhao, Y.; Xiao, W. Combining GEDI and sentinel data to estimate forest canopy mean height and aboveground biomass. Ecol. Inform. 2023, 78, 102348. [Google Scholar] [CrossRef]
- Lang, N.; Jetz, W.; Schindler, K.; Wegner, J.D. A high-resolution canopy height model of the Earth. Nat. Ecol. Evol. 2023, 7, 1778–1789. [Google Scholar] [CrossRef]
- Musthafa, M.; Singh, G.; Kumar, P. Comparison of forest stand height interpolation of GEDI and ICESat-2 LiDAR measurements over tropical and sub-tropical forests in India. Environ. Monit. Assess. 2022, 195, 71. [Google Scholar] [CrossRef] [PubMed]
- Abdalati, W.; Zwally, H.J.; Bindschadler, R.; Csatho, B.; Farrell, S.L.; Fricker, H.A.; Harding, D.; Kwok, R.; Lefsky, M.; Markus, T.; et al. The ICESat-2 Laser Altimetry Mission. Proc. IEEE 2010, 98, 735–751. [Google Scholar] [CrossRef]
- Neuenschwander, A.; Guenther, E.; White, J.C.; Duncanson, L.; Montesano, P. Validation of ICESat-2 terrain and canopy heights in boreal forests. Remote Sens. Environ. 2020, 251, 112110. [Google Scholar] [CrossRef]
- Chen, L.; Ren, C.; Zhang, B.; Wang, Z.; Liu, M.; Man, W.; Liu, J. Improved estimation of forest stand volume by the integration of GEDI LiDAR data and multi-sensor imagery in the Changbai Mountains Mixed forests Ecoregion (CMMFE), northeast China. Int. J. Appl. Earth Obs. Geoinf. 2021, 100, 102326. [Google Scholar] [CrossRef]
- Schwartz, M.; Ciais, P.; Ottlé, C.; De Truchis, A.; Vega, C.; Fayad, I.; Brandt, M.; Fensholt, R.; Baghdadi, N.; Morneau, F.; et al. High-resolution canopy height map in the Landes forest (France) based on GEDI, Sentinel-1, and Sentinel-2 data with a deep learning approach. Int. J. Appl. Earth Obs. Geoinf. 2024, 128, 103711. [Google Scholar] [CrossRef]
- Qi, W.; Saarela, S.; Armston, J.; Ståhl, G.; Dubayah, R. Forest biomass estimation over three distinct forest types using TanDEM-X InSAR data and simulated GEDI lidar data. Remote Sens. Environ. 2019, 232, 111283. [Google Scholar] [CrossRef]
- Zhu, X.; Nie, S.; Zhu, Y.; Chen, Y.; Yang, B.; Li, W. Evaluation and Comparison of ICESat-2 and GEDI Data for Terrain and Canopy Height Retrievals in Short-Stature Vegetation. Remote Sens. 2023, 15, 4969. [Google Scholar] [CrossRef]
- Wang, C.; Jia, D.; Lei, S.; Numata, I.; Tian, L. Accuracy Assessment and Impact Factor Analysis of GEDI Leaf Area Index Product in Temperate Forest. Remote Sens. 2023, 15, 1535. [Google Scholar] [CrossRef]
- Lahssini, K.; Baghdadi, N.; le Maire, G.; Fayad, I. Influence of GEDI Acquisition and Processing Parameters on Canopy Height Estimates over Tropical Forests. Remote Sens. 2022, 14, 6264. [Google Scholar] [CrossRef]
- Rajab Pourrahmati, M.; le Maire, G.; Baghdadi, N.; Ferraco Scolforo, H.; Alcarde Alvares, C.; Stape, J.L.; Fayad, I. Effects of Eucalyptus plantation characteristics and environmental factors on GEDI waveform metrics. Int. J. Remote Sens. 2024, 45, 3737–3763. [Google Scholar] [CrossRef]
- Marselis, S.M.; Keil, P.; Chase, J.M.; Dubayah, R. The use of GEDI canopy structure for explaining variation in tree species richness in natural forests. Environ. Res. Lett. 2022, 17, 045003. [Google Scholar] [CrossRef]
- Tang, H.; Stoker, J.; Luthcke, S.; Armston, J.; Lee, K.; Blair, B.; Hofton, M. Evaluating and mitigating the impact of systematic geolocation error on canopy height measurement performance of GEDI. Remote Sens. Environ. 2023, 291, 113571. [Google Scholar] [CrossRef]
- Roy, D.P.; Kashongwe, H.B.; Armston, J. The impact of geolocation uncertainty on GEDI tropical forest canopy height estimation and change monitoring. Sci. Remote Sens. 2021, 4, 100024. [Google Scholar] [CrossRef]
- Stojanova, D.; Panov, P.; Gjorgjioski, V.; Kobler, A.; Džeroski, S. Estimating vegetation height and canopy cover from remotely sensed data with machine learning. Ecol. Inform. 2010, 5, 256–266. [Google Scholar] [CrossRef]
- East, A.; Hansen, A.; Jantz, P.; Currey, B.; Roberts, D.W.; Armenteras, D. Validation and Error Minimization of Global Ecosystem Dynamics Investigation (GEDI) Relative Height Metrics in the Amazon. Remote Sens. 2024, 16, 3550. [Google Scholar] [CrossRef]
- Kutchartt, E.; Pedron, M.; Pirotti, F. Assessment of Canopy and Ground Height Accuracy from Gedi Lidar over Steep Mountain Areas. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 3, 431–438. [Google Scholar] [CrossRef]
- Yu, Q.; Ryan, M.G.; Ji, W.; Prihodko, L.; Anchang, J.Y.; Kahiu, N.; Nazir, A.; Dai, J.; Hanan, N.P. Assessing canopy height measurements from ICESat-2 and GEDI orbiting LiDAR across six different biomes with G-LiHT LiDAR. Environ. Res. Ecol. 2024, 3, 025001. [Google Scholar] [CrossRef]
- Dhargay, S.; Lyell, C.S.; Brown, T.P.; Inbar, A.; Sheridan, G.J.; Lane, P.N.J. Performance of GEDI Space-Borne LiDAR for Quantifying Structural Variation in the Temperate Forests of South-Eastern Australia. Remote Sens. 2022, 14, 3615. [Google Scholar] [CrossRef]
- Torre-Tojal, L.; Bastarrika, A.; Boyano, A.; Lopez-Guede, J.M.; Graña, M. Above-ground biomass estimation from LiDAR data using random forest algorithms. J. Comput. Sci. 2022, 58, 101517. [Google Scholar] [CrossRef]
- Quiros, E.; Polo, M.-E.; Fragoso-Campon, L. GEDI Elevation Accuracy Assessment: A Case Study of Southwest Spain. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 5285–5299. [Google Scholar] [CrossRef]
- Schleich, A.; Durrieu, S.; Soma, M.; Vega, C. Improving GEDI Footprint Geolocation Using a High-Resolution Digital Elevation Model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 7718–7732. [Google Scholar] [CrossRef]
- Hofton, M.; Blair, J.B. GEDI Transmit and Receive Waveform Processing for L1 and L2 Products; NASA Goddard Space Flight Center: Greenbelt, MD, USA, 2019.
- Hancock, S.; Armston, J.; Hofton, M.; Sun, X.; Tang, H.; Duncanson, L.I.; Kellner, J.R.; Dubayah, R. The GEDI Simulator: A Large-Footprint Waveform Lidar Simulator for Calibration and Validation of Spaceborne Missions. Earth Space Sci. 2019, 6, 294–310. [Google Scholar] [CrossRef] [PubMed]
- Dubayah, R. GLOBAL Ecosystem Dynamics Investigation (GEDI) Level 2 User Guide; NASA Goddard Space Flight Center: Greenbelt, MD, USA, 2021.
- Chen, X.; Wang, R.; Shi, W.; Li, X.; Zhu, X.; Wang, X. An Individual Tree Segmentation Method That Combines LiDAR Data and Spectral Imagery. Forests 2023, 14, 1009. [Google Scholar] [CrossRef]
- Dubayah, R.; Blair, J.B.; Goetz, S.; Fatoyinbo, L.; Hansen, M.; Healey, S.; Hofton, M.; Hurtt, G.; Kellner, J.; Luthcke, S.; et al. The Global Ecosystem Dynamics Investigation: High-resolution laser ranging of the Earth’s forests and topography. Sci. Remote Sens. 2020, 1, 100002. [Google Scholar] [CrossRef]
- Dubayah, R.; Armston, J.; Healey, S.P.; Bruening, J.M.; Patterson, P.L.; Kellner, J.R.; Duncanson, L.; Saarela, S.; Ståhl, G.; Yang, Z.; et al. GEDI launches a new era of biomass inference from space. Environ. Res. Lett. 2022, 17, 095001. [Google Scholar] [CrossRef]
- Oliveira, V.C.P.; Zhang, X.; Peterson, B.; Ometto, J.P. Using simulated GEDI waveforms to evaluate the effects of beam sensitivity and terrain slope on GEDI L2A relative height metrics over the Brazilian Amazon Forest. Sci. Remote Sens. 2023, 7, 100083. [Google Scholar] [CrossRef]
- Cățeanu, M.; Miclescu, S.-M. Evaluation of GEDI/ICESat-2 Satellite Lidar Datasets for Ground Surface Modelling. For. Cadastre 2024, 81, 1–11. [Google Scholar]
- Valjarević, A.; Djekić, T.; Stevanović, V.; Ivanović, R.; Jandziković, B. GIS numerical and remote sensing analyses of forest changes in the Toplica region for the period of 1953–2013. Appl. Geogr. 2018, 92, 131–139. [Google Scholar] [CrossRef]
- Wang, X.; Wang, R.; Wei, S.; Xu, S. Application of Random Forest Method Based on Sensitivity Parameter Analysis in Height Inversion in Changbai Mountain Forest Area. Forests 2024, 15, 1161. [Google Scholar] [CrossRef]
- Marshak, A.L.; Antyufeev, V.S. Inversion of Monte Carlo model for estimating vegetation canopy parameters. Remote Sens. Environ. 1990, 33, 201–209. [Google Scholar]
- Guerra-Hernández, J.; Pascual, A. Using GEDI lidar data and airborne laser scanning to assess height growth dynamics in fast-growing species: A showcase in Spain. For. Ecosyst. 2021, 8, 14. [Google Scholar] [CrossRef]
- Wang, C.; Elmore, A.J.; Numata, I.; Cochrane, M.A.; Shaogang, L.; Huang, J.; Zhao, Y.; Li, Y.J.G.; Sensing, R. Factors affecting relative height and ground elevation estimations of GEDI among forest types across the conterminous USA. GISci. Remote Sens. 2022, 59, 975–999. [Google Scholar] [CrossRef]
- Li, X.; Li, L.; Ni, W.; Mu, X.; Wu, X.; Vaglio Laurin, G.; Vangi, E.; Stereńczak, K.; Chirici, G.; Yu, S.; et al. Validating GEDI tree canopy cover product across forest types using co-registered aerial LiDAR data. ISPRS J. Photogramm. Remote Sens. 2024, 207, 326–337. [Google Scholar] [CrossRef]
- Dorado-Roda, I.; Pascual, A.; Godinho, S.; Silva, C.; Botequim, B.; Rodríguez-Gonzálvez, P.; González-Ferreiro, E.; Guerra-Hernández, J. Assessing the Accuracy of GEDI Data for Canopy Height and Aboveground Biomass Estimates in Mediterranean Forests. Remote Sens. 2021, 13, 2279. [Google Scholar] [CrossRef]
- Yu, J.; Nie, S.; Liu, W.; Zhu, X.; Sun, Z.; Li, J.; Wang, C.; Xi, X.; Fan, H. Mapping global mangrove canopy height by integrating Ice, Cloud, and Land Elevation Satellite-2 photon-counting LiDAR data with multi-source images. Sci. Total Environ. 2024, 939, 173487. [Google Scholar] [CrossRef]
- Liu, C.; Wang, S. Estimating Tree Canopy Height in Densely Forest-Covered Mountainous Areas Using Gedi Spaceborne Full-Waveform Data. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 1, 25–32. [Google Scholar] [CrossRef]
- Lang, N.; Kalischek, N.; Armston, J.; Schindler, K.; Dubayah, R.; Wegner, J.D. Global canopy height regression and uncertainty estimation from GEDI LIDAR waveforms with deep ensembles. Remote Sens. Environ. 2022, 268, 112760. [Google Scholar] [CrossRef]
- Xu, Y.; Ding, S.; Chen, P.; Tang, H.; Ren, H.; Huang, H. Horizontal Geolocation Error Evaluation and Correction on Full-Waveform LiDAR Footprints via Waveform Matching. Remote Sens. 2023, 15, 776. [Google Scholar] [CrossRef]
- Zhao, Z.; Jiang, B.; Wang, H.; Wang, C. Forest Canopy Height Retrieval Model Based on a Dual Attention Mechanism Deep Network. Forests 2024, 15, 1132. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operational Characteristics | Operating Altitude | ≈400 km |
| Coverage Range | 51.6° S to 51.6° N | |
| Reference System | WGS84 | |
| Beam and Measurement Details | Beam Diameter | ≈25 m |
| Along-Track Distance Between Footprints | 60 m | |
| Across-Track Distance Between Footprints | 600 m | |
| Number of Tracks | 8 beam tracks | |
| Laser Specifications | Laser Wavelength | 1064 nm |
| Pulse Width | 14 ns | |
| Pulse Intensity | 10 mJ | |
| Emission Frequency | 242 Hz | |
| Scanning Area | Scan Width | 4.2 km |
| Median | Var | Std | |
|---|---|---|---|
| Algorithm 1 | 0.54 | 1040.20 | 32.25 |
| Algorithm 2 | 0.85 | 208.34 | 14.43 |
| Algorithm 3 | 0.64 | 736.6 | 27.14 |
| Algorithm 4 | 0.54 | 1040.2 | 32.25 |
| Algorithm 5 | 0.91 | 100.63 | 10.03 |
| Algorithm 6 | 0.77 | 339.95 | 18.44 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Wang, R.; Yang, B.; Yang, L.; Liu, F.; Xiong, K. Simulation-Based Correction of Geolocation Errors in GEDI Footprint Positions Using Monte Carlo Approach. Forests 2025, 16, 768. https://doi.org/10.3390/f16050768
Wang X, Wang R, Yang B, Yang L, Liu F, Xiong K. Simulation-Based Correction of Geolocation Errors in GEDI Footprint Positions Using Monte Carlo Approach. Forests. 2025; 16(5):768. https://doi.org/10.3390/f16050768
Chicago/Turabian StyleWang, Xiaoyan, Ruirui Wang, Banghui Yang, Le Yang, Fei Liu, and Kaiwei Xiong. 2025. "Simulation-Based Correction of Geolocation Errors in GEDI Footprint Positions Using Monte Carlo Approach" Forests 16, no. 5: 768. https://doi.org/10.3390/f16050768
APA StyleWang, X., Wang, R., Yang, B., Yang, L., Liu, F., & Xiong, K. (2025). Simulation-Based Correction of Geolocation Errors in GEDI Footprint Positions Using Monte Carlo Approach. Forests, 16(5), 768. https://doi.org/10.3390/f16050768