
Improvement of 3D Green Volume Estimation Method for Individual Street Trees Based on TLS Data

Abstract
1. Introduction
2. Materials and Methods
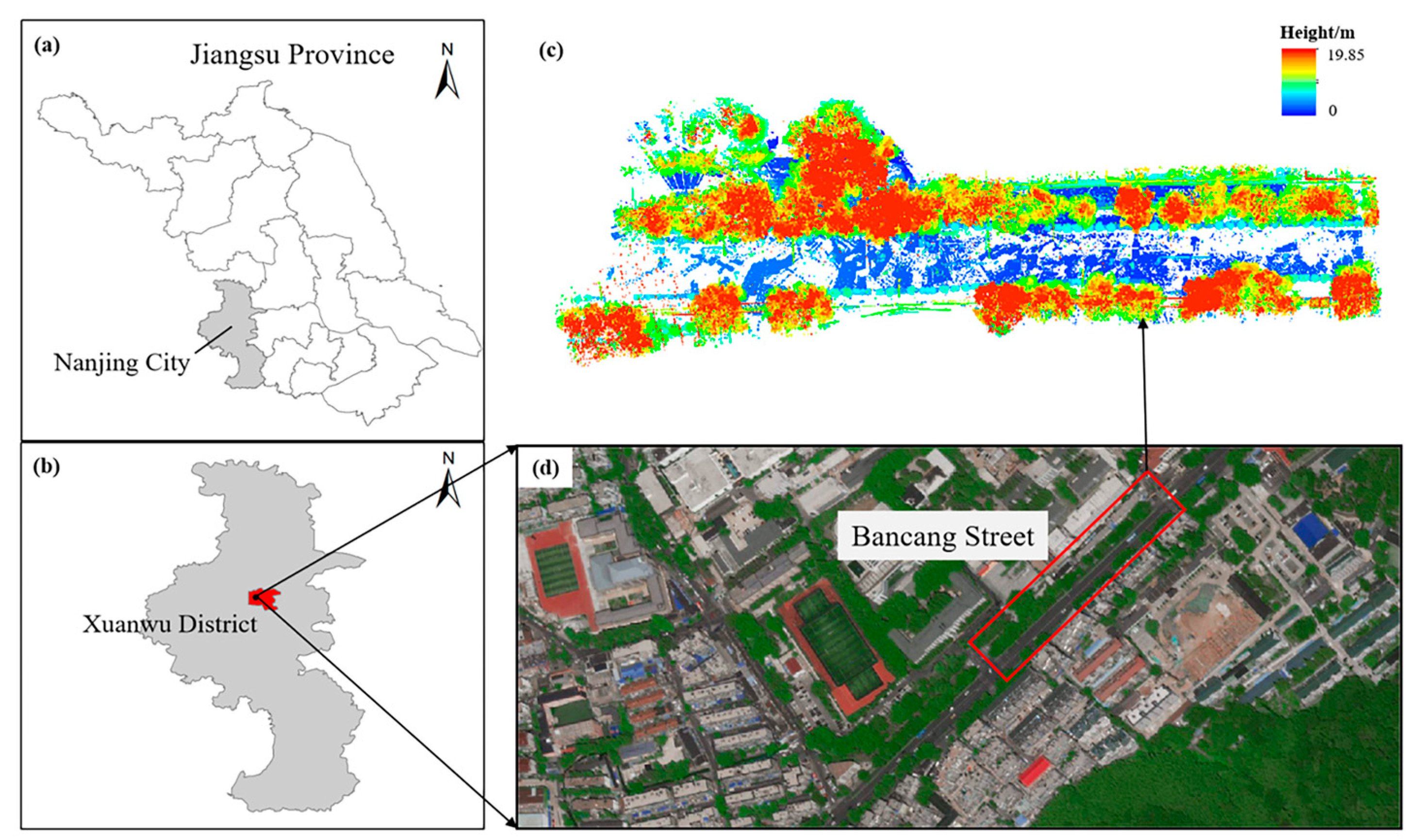
2.1. Study Area
2.2. Data Acquisition
2.3. Data Preprocessing
2.4. 3DGV Calculation
2.5. 3DGV Fitting
2.5.1. LiDAR Variables
2.5.2. Fitting
2.5.3. Model Verification
2.6. Technical Flow
3. Results
3.1. 3DGV Is Calculated by the CHCM
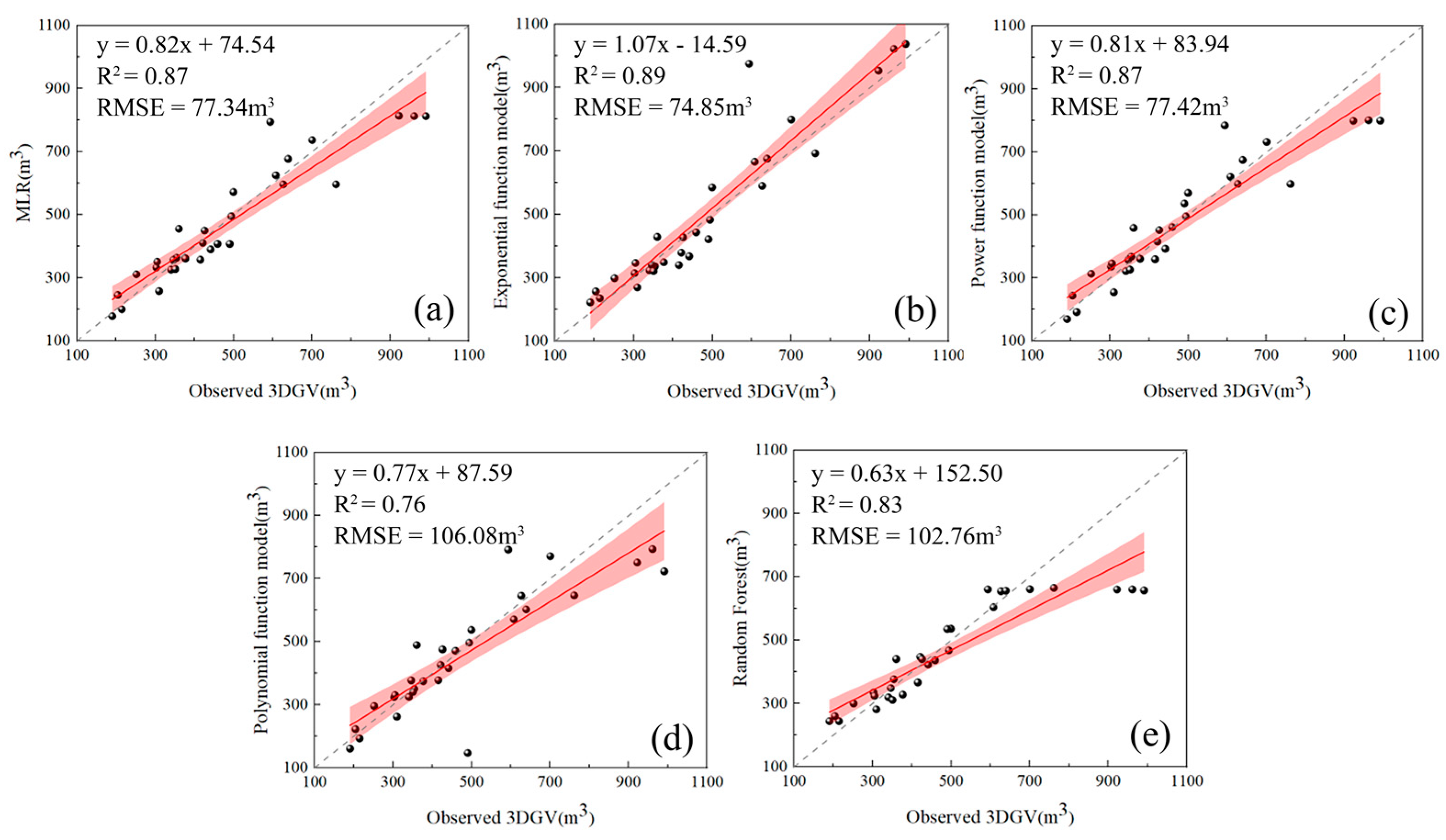
3.2. 3DGV Calculation Results for Different Methods
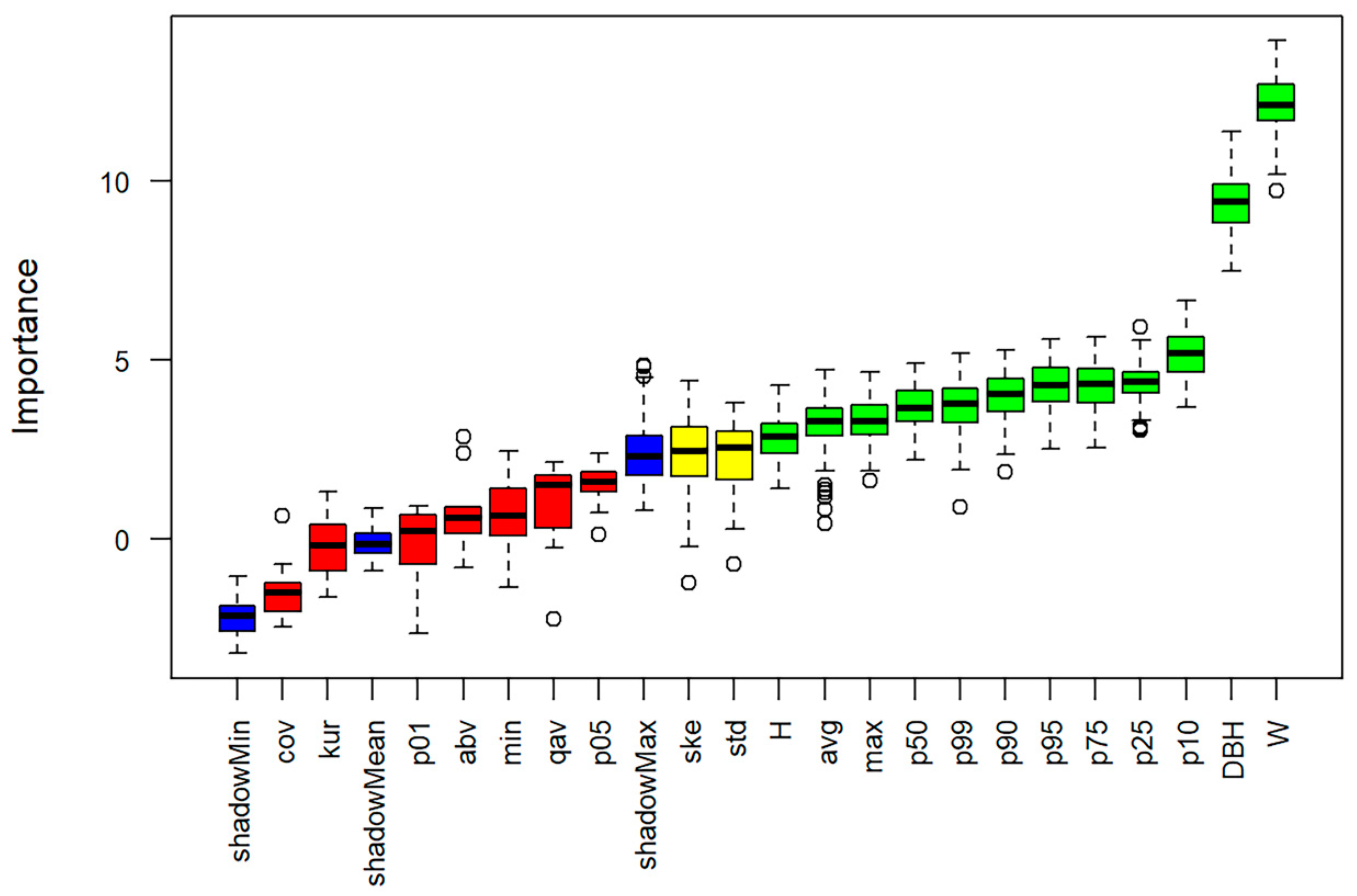
3.3. Variable Selection and Model Accuracy
4. Discussion
4.1. Comparison of Different Methods
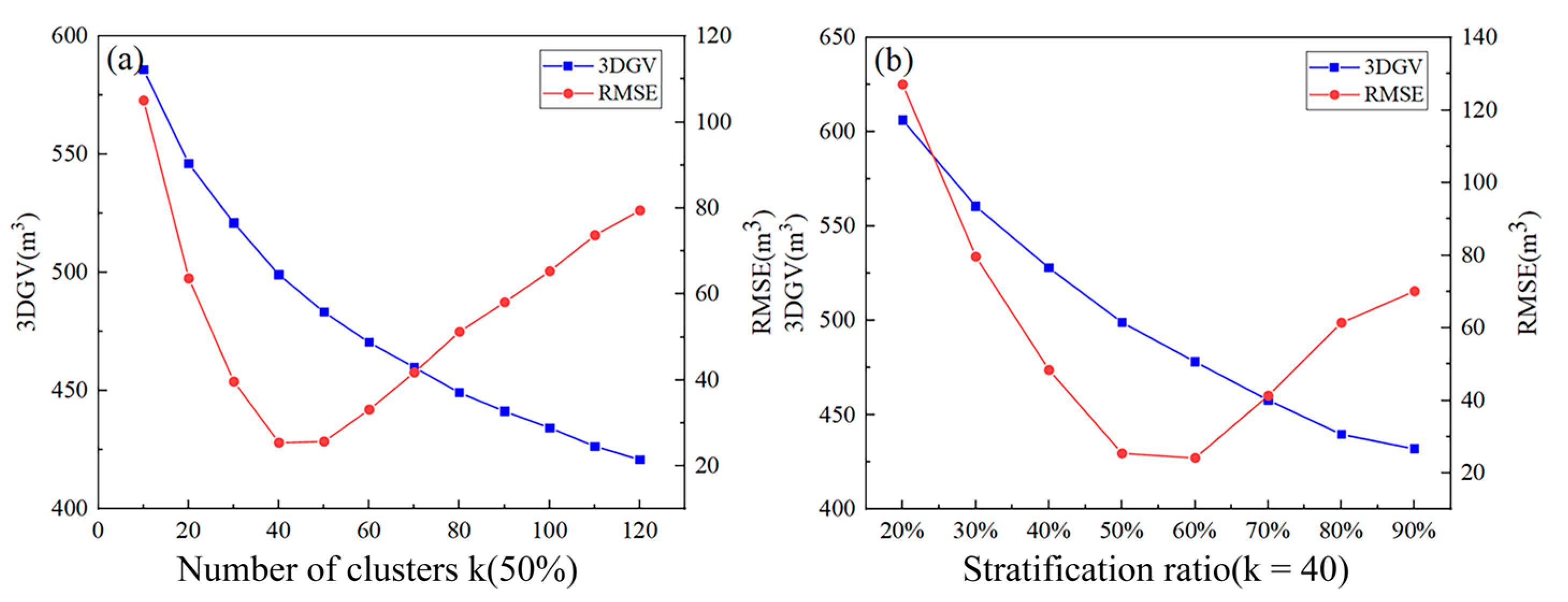
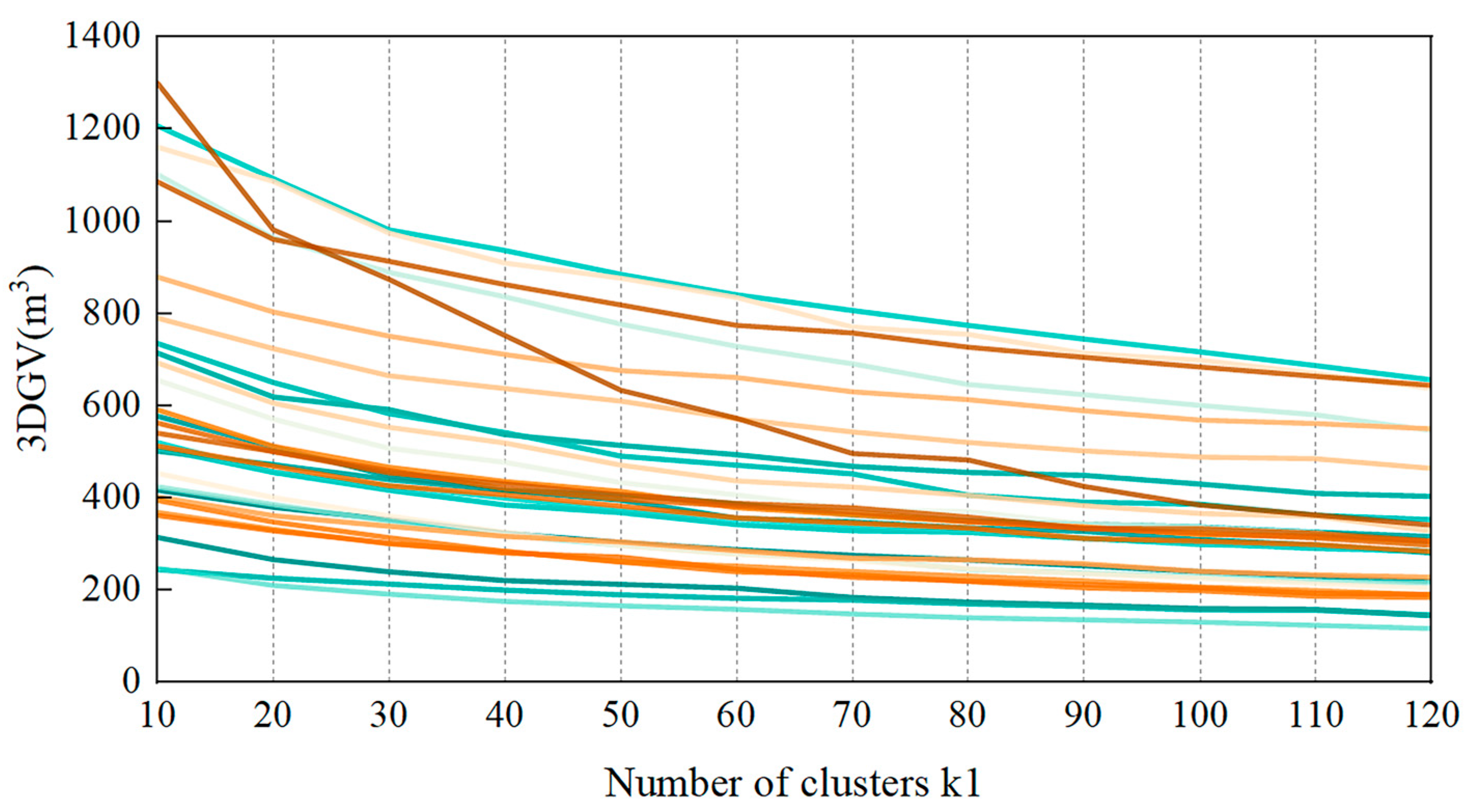
4.2. Parameter and Model Analysis
4.3. Research Deficiencies and Prospects
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ćwik, A.; Wójcik, T.; Ziaja, M.; Wójcik, M.; Kluska, K.; Kasprzyk, I. Ecosystem Services and Disservices of Vegetation in Recreational Urban Blue-Green Spaces—Some Recommendations for Greenery Shaping. Forests 2021, 12, 1077. [Google Scholar] [CrossRef]
- Zhao, W. Research on Urban Green Space System Evaluation Index System. IOP Conf. Ser. Earth Environ. Sci. 2018, 208, 012061. [Google Scholar] [CrossRef]
- Hong, Z.; Xu, W.; Liu, Y.; Wang, L.; Ou, G.; Lu, N.; Dai, Q. Retrieval of Three-Dimensional Green Volume in Urban Green Space from Multi-Source Remote Sensing Data. Remote Sens. 2023, 15, 5364. [Google Scholar] [CrossRef]
- Bai, Y.; Liu, M.; Wang, W.; Xiong, X.; Li, S. Quantification of Urban Greenspace in Shenzhen Based on Remote Sensing Data. Remote Sens. 2023, 15, 4957. [Google Scholar] [CrossRef]
- Richards, D.; Wang, J.W. Fusing Street Level Photographs and Satellite Remote Sensing to Map Leaf Area Index. Ecol. Indic. 2020, 115, 106342. [Google Scholar] [CrossRef]
- Huang, J.; Song, P.; Liu, X.; Li, A.; Wang, X.; Liu, B.; Feng, Y. Carbon Sequestration and Landscape Influences in Urban Greenspace Coverage Variability: A High-Resolution Remote Sensing Study in Luohe, China. Forests 2024, 15, 1849. [Google Scholar] [CrossRef]
- Zhou, J.; Sun, T. Study on Remote Sensing Model of Three-Dimensional Green Biomass and the Estimation of Environmental Benefits of Greenery. Remote Sens. Environ. China 1995, 3, 162–174. [Google Scholar] [CrossRef]
- Li, F.; Li, M.; Feng, X. High-Precision Method for Estimating the Three-Dimensional Green Quantity of an Urban Forest. J. Indian Soc. Remote Sens. 2021, 49, 1407–1417. [Google Scholar] [CrossRef]
- Giannico, V.; Stafoggia, M.; Spano, G.; Elia, M.; Dadvand, P.; Sanesi, G. Characterizing green and gray space exposure for epidemiological studies: Moving from 2D to 3D indicators. Urban For. Urban Green. 2022, 72, 127567. [Google Scholar] [CrossRef]
- Kong, L.; Wang, X.; Zhou, X. Living Vegetation Volume Estimation of Urban Street Trees by Integrating Street View and Remote Sensing Images. J. Fuzhou Univ. (Nat. Sci. Ed.) 2025, 53, 1–8. [Google Scholar] [CrossRef]
- Miguel, E.; Rezende, A.; Pereira, R.; Azevedo, G.; Mota, F.; Souza, A.; Joaquim, M. Modeling and Prediction of Volume and Aereal Biomass of the Tree Vegetation in a Cerradao Area of Central Brazil. Interciencia 2017, 42, 21–27. [Google Scholar]
- Verma, N.K.; Lamb, D.W.; Reid, N.; Wilson, B. Comparison of Canopy Volume Measurements of Scattered Eucalypt Farm Trees Derived from High Spatial Resolution Imagery and LiDAR. Remote Sens. 2016, 8, 388. [Google Scholar] [CrossRef]
- Miranda-Fuentes, A.; Llorens, J.; Gamarra-Diezma, J.L.; Gil-Ribes, J.A.; Gil, E. Towards an Optimized Method of Olive Tree Crown Volume Measurement. Sensors 2015, 15, 3671–3687. [Google Scholar] [CrossRef] [PubMed]
- Xu, D.; Wang, H.; Xu, W.; Luan, Z.; Xu, X. LiDAR Applications to Estimate Forest Biomass at Individual Tree Scale: Opportunities, Challenges and Future Perspectives. Forests 2021, 12, 550. [Google Scholar] [CrossRef]
- Luo, T.; Rao, S.; Ma, W.; Song, Q.; Cao, Z.; Zhang, H.; Xie, J.; Wen, X.; Gao, W.; Chen, Q.; et al. YOLOTree-Individual Tree Spatial Positioning and Crown Volume Calculation Using UAV-RGB Imagery and LiDAR Data. Forests 2024, 15, 1375. [Google Scholar] [CrossRef]
- Calders, K.; Adams, J.; Armston, J.; Bartholomeus, H.; Bauwens, S.; Bentley, L.P.; Chave, J.; Danson, M.; Demol, M.; Disney, M.; et al. Terrestrial Laser Scanning in Forest Ecology: Expanding the Horizon. Remote Sens. Environ. 2020, 251, 112102. [Google Scholar] [CrossRef]
- Yang, Y.; Shen, X.; Cao, L. Estimation of the Living Vegetation Volume (LVV) for Individual Urban Street Trees Based on Vehicle-Mounted LiDAR Data. Remote Sens. 2024, 16, 1662. [Google Scholar] [CrossRef]
- Hong, Z.; Xu, W.; Liu, Y.; Wang, L.; Ou, G.; Lu, N.; Dai, Q. Estimation of the Three-Dimension Green Volume Based on UAV RGB Images: A Case Study in YueYaTan Park in Kunming, China. Forests 2023, 14, 752. [Google Scholar] [CrossRef]
- Olsoy, P.J.; Glenn, N.F.; Clark, P.E.; Derryberry, D.R. Aboveground Total and Green Biomass of Dryland Shrub Derived from Terrestrial Laser Scanning. ISPRS J. Photogramm. Remote Sens. 2014, 88, 166–173. [Google Scholar] [CrossRef]
- Colaço, A.F.; Trevisan, R.G.; Molin, J.P.; Rosell-Polo, J.R.; Escolà, A. Orange Tree Canopy Volume Estimation by Manual and LiDAR-Based Methods. Adv. Anim. Biosci. 2017, 8, 477–480. [Google Scholar] [CrossRef]
- Li, X.; Tang, L.; Peng, W.; Chen, J.; Ma, X. Estimation Method of Urban Green Space Living Vegetation Volume Based on Backpack Light Detection and Ranging. Chin. J. Appl. Ecol. 2022, 33, 2777–2784. [Google Scholar] [CrossRef]
- Korhonen, L.; Vauhkonen, J.; Virolainen, A.; Hovi, A.; Korpela, I. Estimation of Tree Crown Volume from Airborne Lidar Data Using Computational Geometry. Int. J. Remote Sens. 2013, 34, 7236–7248. [Google Scholar] [CrossRef]
- Wang, J.Y. Calculation Method of Single Tree Canopy Volume Based on LiDAR Technology. Master’s Thesis, Henan Polytechnic University, Jiaozuo, China, 2022. [Google Scholar]
- Fernández-Sarría, A.; Martínez, L.; Velázquez-Martí, B.; Sajdak, M.; Estornell, J.; Recio, J.A. Different Methodologies for Calculating Crown Volumes of Platanus hispanica Trees Using Terrestrial Laser Scanner and a Comparison with Classical Dendrometric Measurements. Comput. Electron. Agric. 2013, 90, 176–185. [Google Scholar] [CrossRef]
- Huang, F.; Peng, S.; Chen, S.; Cao, H.; Ma, N. VO-LVV–A Novel Urban Regional Living Vegetation Volume Quantitative Estimation Model Based on the Voxel Measurement Method and an Octree Data Structure. Remote Sens. 2022, 14, 855. [Google Scholar] [CrossRef]
- Wang, K.; Kumar, P. Characterizing Relative Degrees of Clumping Structure in Vegetation Canopy Using Waveform LiDAR. Remote Sens. Environ. 2019, 232, 111281. [Google Scholar] [CrossRef]
- Zhu, H.; Nan, X.; Kang, N.; Li, S. How Much Visual Greenery Can Street Trees Generate from a Humanistic Perspective? An Attempt to Quantify the Canopy Green View Index Based on Tree Morphology. Forests 2024, 15, 88. [Google Scholar] [CrossRef]
- Liu, J.; Zheng, B. A Simulation Study on the Influence of Street Tree Configuration on Fine Particulate Matter (PM2.5) Concentration in Street Canyons. Forests 2023, 14, 1550. [Google Scholar] [CrossRef]
- Sun, X.; Qiu, Y.; Qi, H.; Lu, W.; Tian, J.; Chen, S.; Xu, Y. Improving the Ecological Benefits Evaluation on Urban Street Trees: Development of a Living Vegetation Volume Quantifying Framework with Multi-Source Data. Ecol. Indic. 2024, 158, 111367. [Google Scholar] [CrossRef]
- Gratani, L.; Vasheka, O.; Bigaran, F. Phenotypic Plasticity of Platanus acerifolia (Platanaceae): Morphological and Anatomical Trait Variations in Response to Different Pollution Levels in Rome. Mod. Phytomorphology 2020, 14, 55–63. [Google Scholar] [CrossRef]
- Hang, X.; Li, Y.; Luo, X.; Xu, M.; Han, X. Assessing the Ecological Quality of Nanjing during Its Urbanization Process by Using Satellite, Meteorological, and Socioeconomic Data. J. Meteorol. Res. 2020, 34, 280–293. [Google Scholar] [CrossRef]
- Massetti, L. Assessing the Impact of Street Lighting on Platanus × acerifolia Phenology. Urban For. Urban Green. 2018, 34, 71–77. [Google Scholar] [CrossRef]
- Liu, M.Z. Research on Organic Renewal Design Strategy of Street Tree Landscape in Nanjing Abstract. Master’s Thesis, Nanjing Forestry University, Nanjing, China, 2023. [Google Scholar]
- Vicari, M.B.; Disney, M.; Wilkes, P.; Burt, A.; Calders, K.; Woodgate, W. Leaf and Wood Classification Framework for Terrestrial LiDAR Point Clouds. Methods Ecol. Evol. 2019, 10, 680–694. [Google Scholar] [CrossRef]
- Wang, D.; Momo Takoudjou, S.; Casella, E. LeWoS: A Universal Leaf-wood Classification Method to Facilitate the 3D Modelling of Large Tropical Trees Using Terrestrial LiDAR. Methods Ecol. Evol. 2020, 11, 376–389. [Google Scholar] [CrossRef]
- Ali, M.; Lohani, B.; Hollaus, M.; Pfeifer, N. Benchmarking Geometry-Based Leaf-Filtering Algorithms for Tree Volume Estimation Using Terrestrial LiDAR Scanners. Remote Sens. 2024, 16, 1021. [Google Scholar] [CrossRef]
- Xu, W.; Feng, Z.; Su, Z.; Xu, H.; Jiao, Y.; Deng, O. An Automatic Extraction Algorithm for Individual Tree Crown Projection Area and Volume Based on 3D Point Cloud Data. Spectrosc. Spectr. Anal. 2014, 34, 465–471. [Google Scholar] [CrossRef]
- Ghanbari Parmehr, E.; Amati, M. Individual Tree Canopy Parameters Estimation Using UAV-Based Photogrammetric and LiDAR Point Clouds in an Urban Park. Remote Sens. 2021, 13, 2062. [Google Scholar] [CrossRef]
- Rodríguez-Lozano, B.; Rodríguez-Caballero, E.; Maggioli, L.; Cantón, Y. Non-Destructive Biomass Estimation in Mediterranean Alpha Steppes: Improving Traditional Methods for Measuring Dry and Green Fractions by Combining Proximal Remote Sensing Tools. Remote Sens. 2021, 13, 2970. [Google Scholar] [CrossRef]
- Li, X.; Tang, L.; Huang, H.; Chen, C.; He, J. A Method for Estimating Living Vegetation Volume of Urban Trees based on Point Cloud Data. Remote Sens. Technol. Appl. 2022, 37, 1119–1127. [Google Scholar]
- Zhou, L.; Li, X.; Zhang, B.; Xuan, J.; Gong, Y.; Tan, C.; Huang, H.; Du, H. Estimating 3D Green Volume and Aboveground Biomass of Urban Forest Trees by UAV-Lidar. Remote Sens. 2022, 14, 5211. [Google Scholar] [CrossRef]
- Zhu, Z.; Kleinn, C.; Nölke, N. Towards Tree Green Crown Volume: A Methodological Approach Using Terrestrial Laser Scanning. Remote Sens. 2020, 12, 1841. [Google Scholar] [CrossRef]
- Lin, W.; Meng, Y.; Qiu, Z.; Zhang, S.; Wu, J. Measurement and Calculation of Crown Projection Area and Crown Volume of Individual Trees Based on 3D Laser-Scanned Point-Cloud Data. Int. J. Remote Sens. 2017, 38, 1083–1100. [Google Scholar] [CrossRef]
- Gupta, S.; Weinacker, H.; Koch, B. Comparative Analysis of Clustering-Based Approaches for 3-D Single Tree Detection Using Airborne Fullwave Lidar Data. Remote Sens. 2010, 2, 968–989. [Google Scholar] [CrossRef]
- Li, L.; Li, D.; Zhu, H.; Li, Y. A Dual Growing Method for the Automatic Extraction of Individual Trees from Mobile Laser Scanning Data. ISPRS J. Photogramm. Remote Sens. 2016, 120, 37–52. [Google Scholar] [CrossRef]
- Wu, B.; Yu, B.; Yue, W.; Shu, S.; Tan, W.; Hu, C.; Huang, Y.; Wu, J.; Liu, H. A Voxel-Based Method for Automated Identification and Morphological Parameters Estimation of Individual Street Trees from Mobile Laser Scanning Data. Remote Sens. 2013, 5, 584–611. [Google Scholar] [CrossRef]
- Huang, M.; Wei, P.; Liu, X. An Efficient Encoding Voxel-Based Segmentation (EVBS) Algorithm Based on Fast Adjacent Voxel Search for Point Cloud Plane Segmentation. Remote Sens. 2019, 11, 2727. [Google Scholar] [CrossRef]
- Kursa, M.B.; Rudnicki, W.R. Feature selection with the Boruta package. J. Stat. Softw. 2010, 36, 1–13. [Google Scholar] [CrossRef]
- Ahmadpour, H.; Bazrafshan, O.; Rafiei-Sardooi, E.; Zamani, H.; Panagopoulos, T. Gully Erosion Susceptibility Assessment in the Kondoran Watershed Using Machine Learning Algorithms and the Boruta Feature Selection. Sustainability 2021, 13, 10110. [Google Scholar] [CrossRef]
- Degenhardt, F.; Seifert, S.; Szymczak, S. Evaluation of variable selection methods for random forests and omics data sets. Brief. Bioinform. 2019, 20, 492–503. [Google Scholar] [CrossRef]
- Cheng, G.; Wang, J.; Yang, J.; Zhao, Z.; Wang, L. Calculation Method of 3D Point Cloud Canopy Volume Based on Improved α-shape Algorithm. Trans. Chin. Soc. Agric. Mach. 2021, 52, 175–183. [Google Scholar] [CrossRef]
- Fernández-Sarría, A.; Velázquez-Martí, B.; Sajdak, M.; Martínez, L.; Estornell, J. Residual Biomass Calculation from Individual Tree Architecture Using Terrestrial Laser Scanner and Ground-Level Measurements. Comput. Electron. Agric. 2013, 93, 90–97. [Google Scholar] [CrossRef]
- Vauhkonen, J.; Seppänen, A.; Packalén, P.; Tokola, T. Improving Species-Specific Plot Volume Estimates Based on Airborne Laser Scanning and Image Data Using Alpha Shape Metrics and Balanced Field Data. Remote Sens. Environ. 2012, 124, 534–541. [Google Scholar] [CrossRef]
- Zhen, Z.; Quackenbush, L.J.; Zhang, L. Trends in Automatic Individual Tree Crown Detection and Delineation—Evolution of LiDAR Data. Remote Sens. 2016, 8, 333. [Google Scholar] [CrossRef]
- Lecigne, B.; Delagrange, S.; Messier, C. Exploring Trees in Three Dimensions: VoxR, a Novel Voxel-Based R Package Dedicated to Analysing the Complex Arrangement of Tree Crowns. Ann. Bot. 2018, 121, 589–601. [Google Scholar] [CrossRef] [PubMed]
- Sun, X.; Xu, S.; Hua, W.; Tian, J.; Xu, Y. Feasibility Study on the Estimation of the Living Vegetation Volume of Individual Street Trees Using Terrestrial Laser Scanning. Urban For. Urban Green. 2022, 71, 127553. [Google Scholar] [CrossRef]
- Wang, P.P. The Estimation of Living Vegetation Volume in the Ring Park around Hefei City Based on TLS and Landsat8. Master’s Thesis, Anhui Agricultural University, Hefei, China, 2018. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scanning Parameter | Specification |
|---|---|
| Laser pulse repetition rate | 1200 kHz |
| Accuracy/Repeatability | 5 mm/3 mm |
| Maximum measurement range | 800 m |
| Minimum measurement range | 1.5 m |
| Horizontal field of view | 360° |
| Horizontal scan speed | 0–150°/s |
| Vertical field of view | 100° (+60°/−40°) |
| Vertical scan speed | 3~240 lines/s |
| LiDAR Variables | Description | Statistical Methods | |
|---|---|---|---|
| Height-based | p01, p05, p10, p25, p50, p75, p90, p95, p99 | The percentiles (p01, p05, p10, p25, p50, p75, p90, p95, p99) of the canopy height distribution of the first returns. | Extracted by LAStools |
| min | Minimum height above ground of all first returns. | ||
| max | Maximum height above ground of all first returns. | ||
| avg | Mean height above ground of all first returns. | ||
| std | The standard deviation of the heights of all points. | ||
| ske | The skewness of the heights of all points. | ||
| kur | The kurtosis of the heights of all points. | ||
| qav | The average square height of all points. | ||
| abv | The number of points that actually are above the cutoff and are participating in the computation. | ||
| Density-based | Canopy cover(cov) | Percentages of first returns above the cover at breast height. | Extracted by LAStools |
| Canopy-based | H | Tree height. | Extracted from the point clouds |
| W | Tree crown width: the average of the width in the north–south and east–west directions. | ||
| DBH | Diameter at breast height. | Field surveys |
| Model | R² | RMSE/m3 |
|---|---|---|
| MLR | 0.87 | 77.34 |
| Exponential function model | 0.89 | 74.85 |
| Power function model | 0.87 | 77.42 |
| Polynomial function model | 0.76 | 106.08 |
| Random forest | 0.83 | 102.76 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Y.; Li, J.; Xu, Y. Improvement of 3D Green Volume Estimation Method for Individual Street Trees Based on TLS Data. Forests 2025, 16, 690. https://doi.org/10.3390/f16040690
Zhu Y, Li J, Xu Y. Improvement of 3D Green Volume Estimation Method for Individual Street Trees Based on TLS Data. Forests. 2025; 16(4):690. https://doi.org/10.3390/f16040690
Chicago/Turabian StyleZhu, Yanghong, Jianrong Li, and Yannan Xu. 2025. "Improvement of 3D Green Volume Estimation Method for Individual Street Trees Based on TLS Data" Forests 16, no. 4: 690. https://doi.org/10.3390/f16040690
APA StyleZhu, Y., Li, J., & Xu, Y. (2025). Improvement of 3D Green Volume Estimation Method for Individual Street Trees Based on TLS Data. Forests, 16(4), 690. https://doi.org/10.3390/f16040690