
Harnessing Backpack Lidar Technology: A Novel Approach to Monitoring Moso Bamboo Shoot Growth


 ,
,
Abstract
1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Field Data Acquisition
2.2.1. Sample Plots’ Data
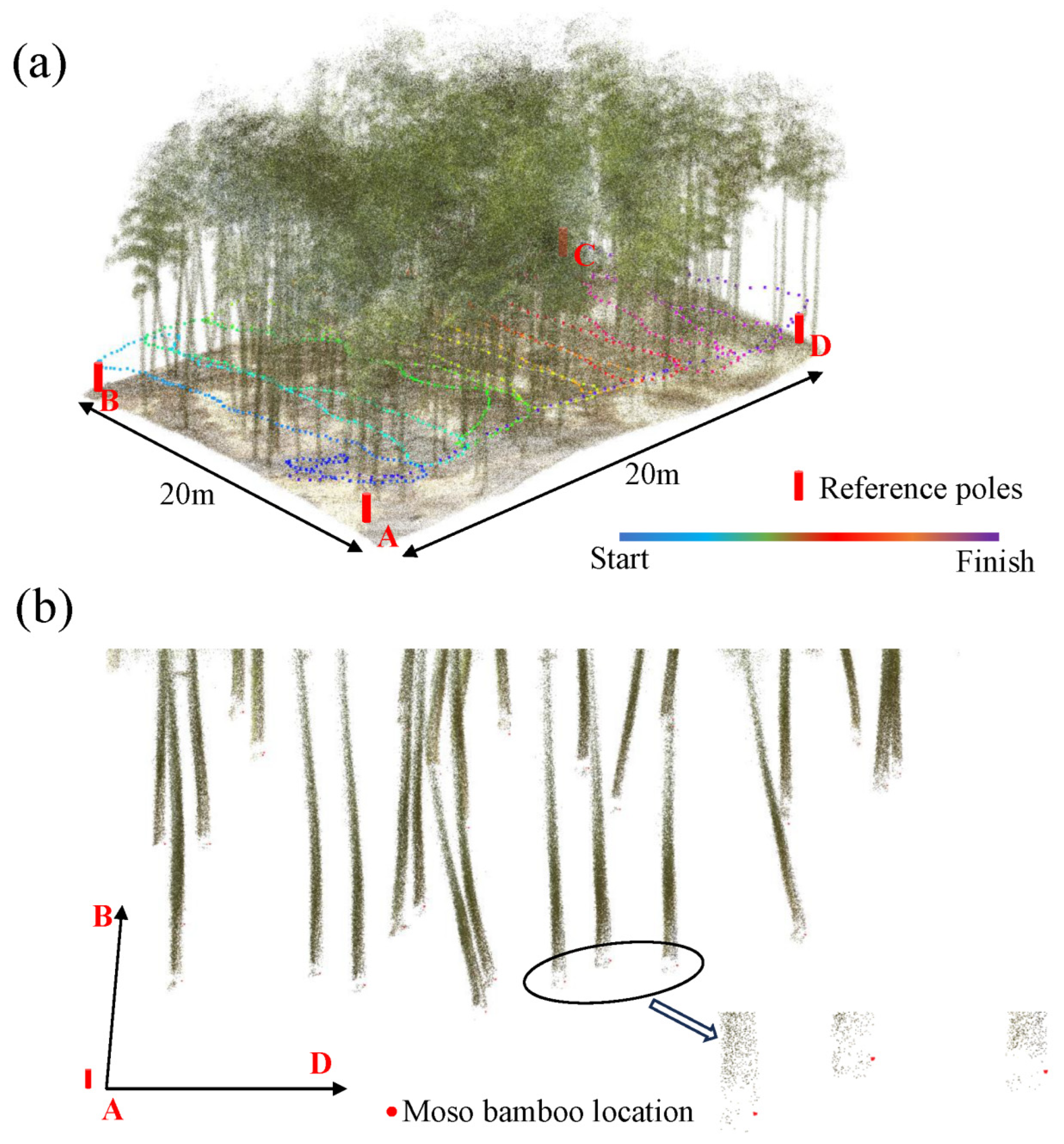
2.2.2. BLS Data
2.3. BLS Data Preprocessing
2.4. Moso Bamboo Parameter Extraction and Accuracy Verification
2.4.1. Extraction of Height and Location of Moso Bamboo
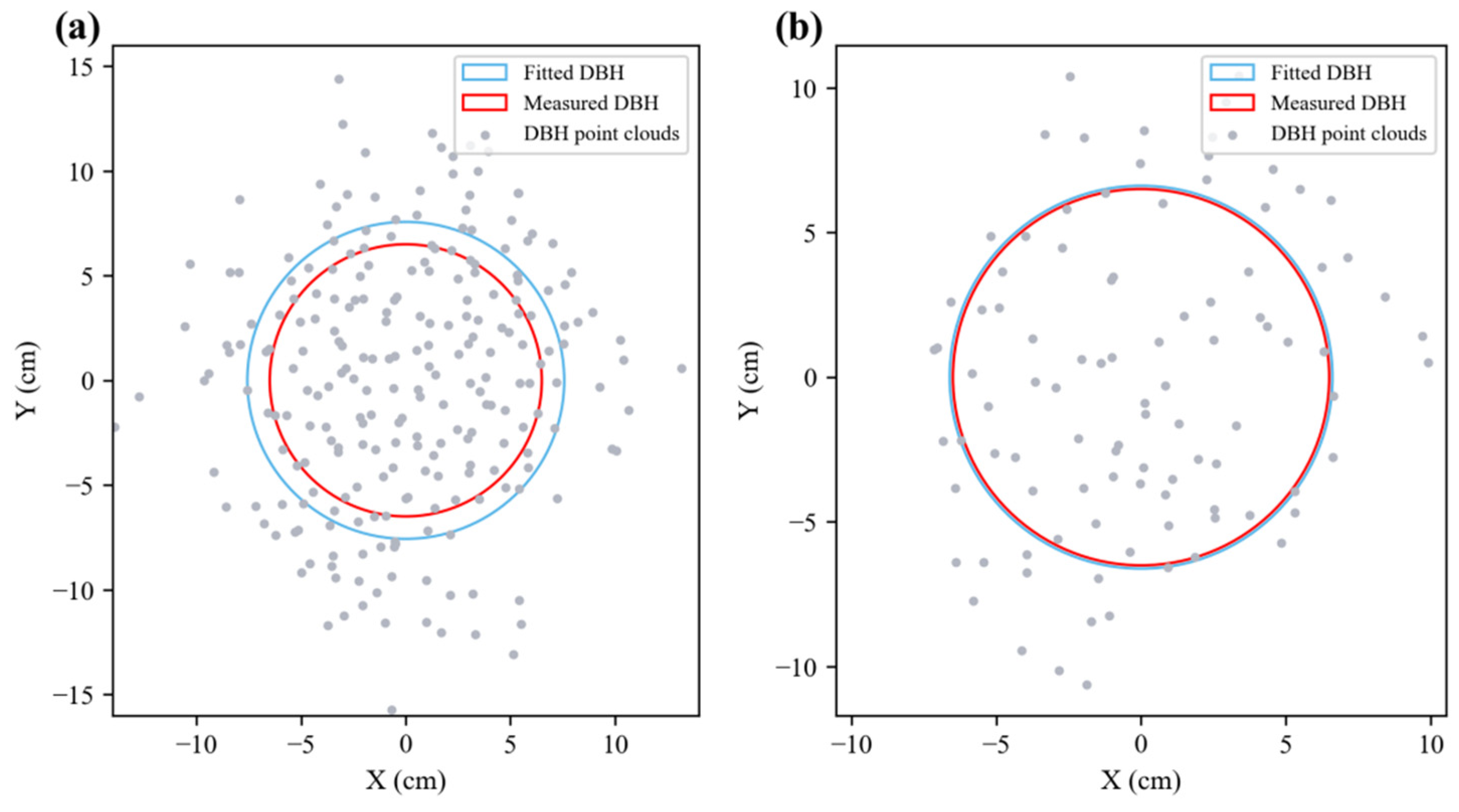
2.4.2. Extracting DBH from Moso Bamboo and Shoots
2.4.3. Accuracy Verification
2.5. Indicators Influencing Location and Growth Rate
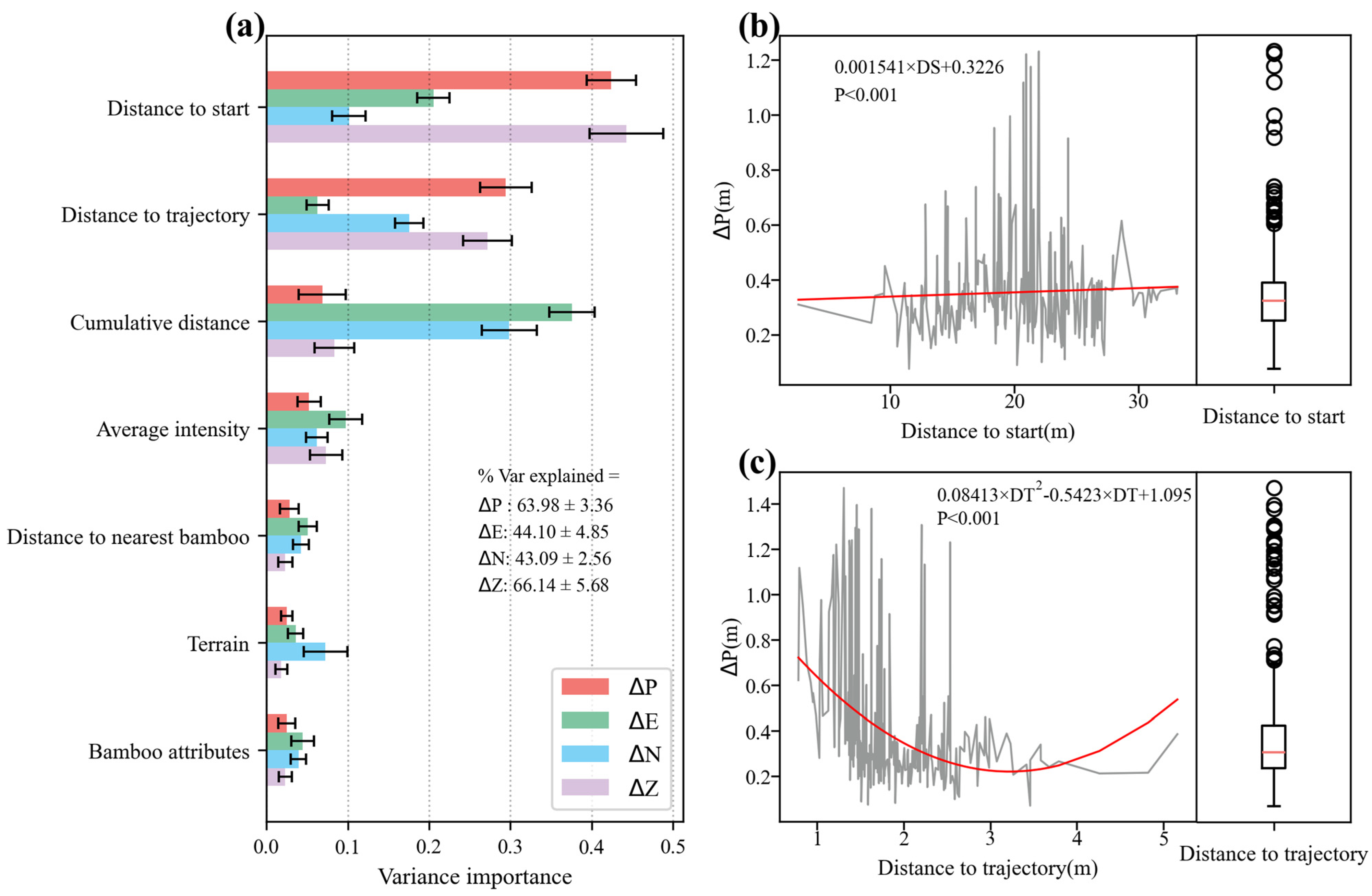
2.5.1. Indicators Influencing Location
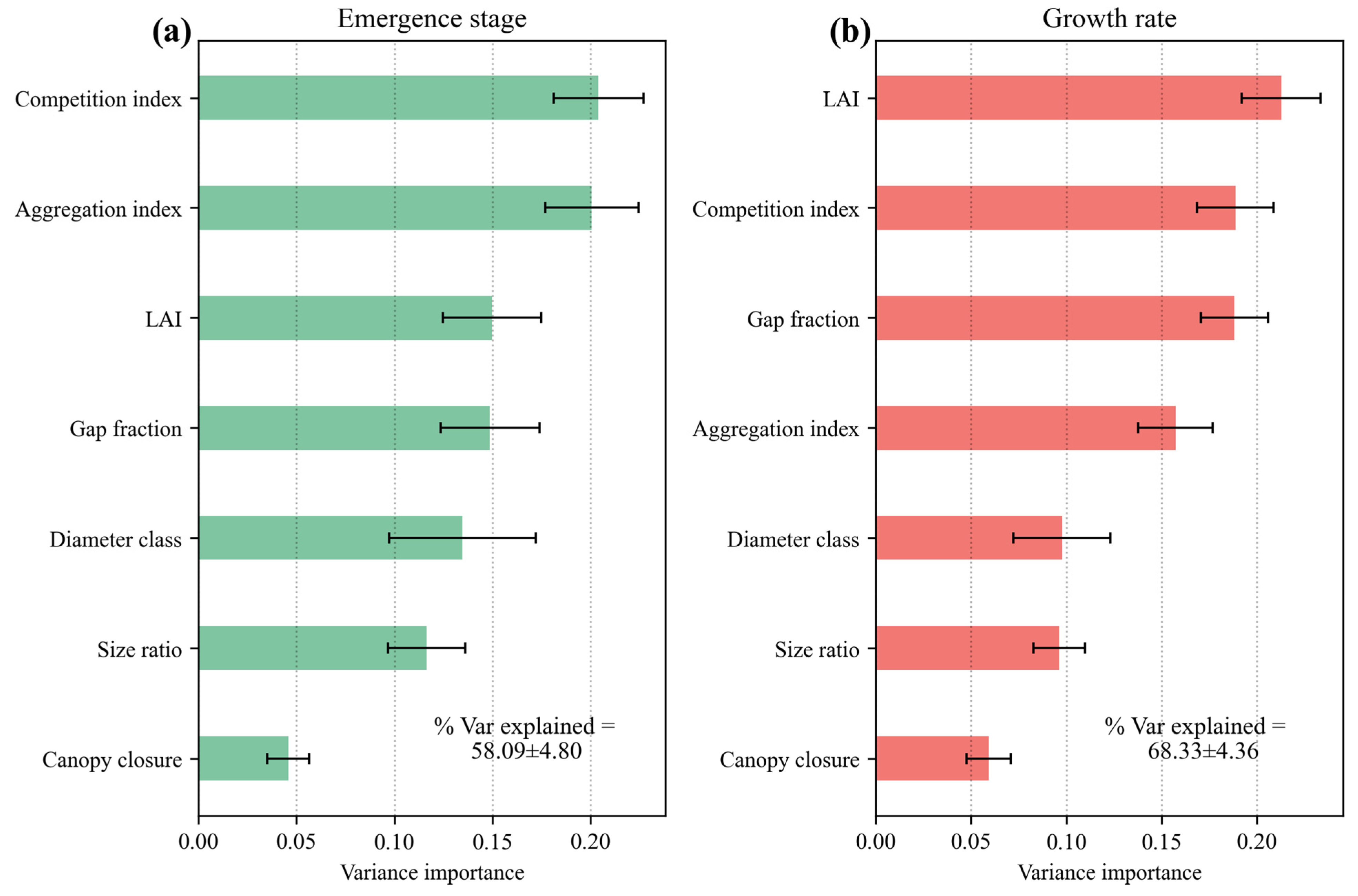
2.5.2. Spatial Structure Indicators Influencing Growth Rate
2.6. Calculation Formula for Carbon Storage
3. Result
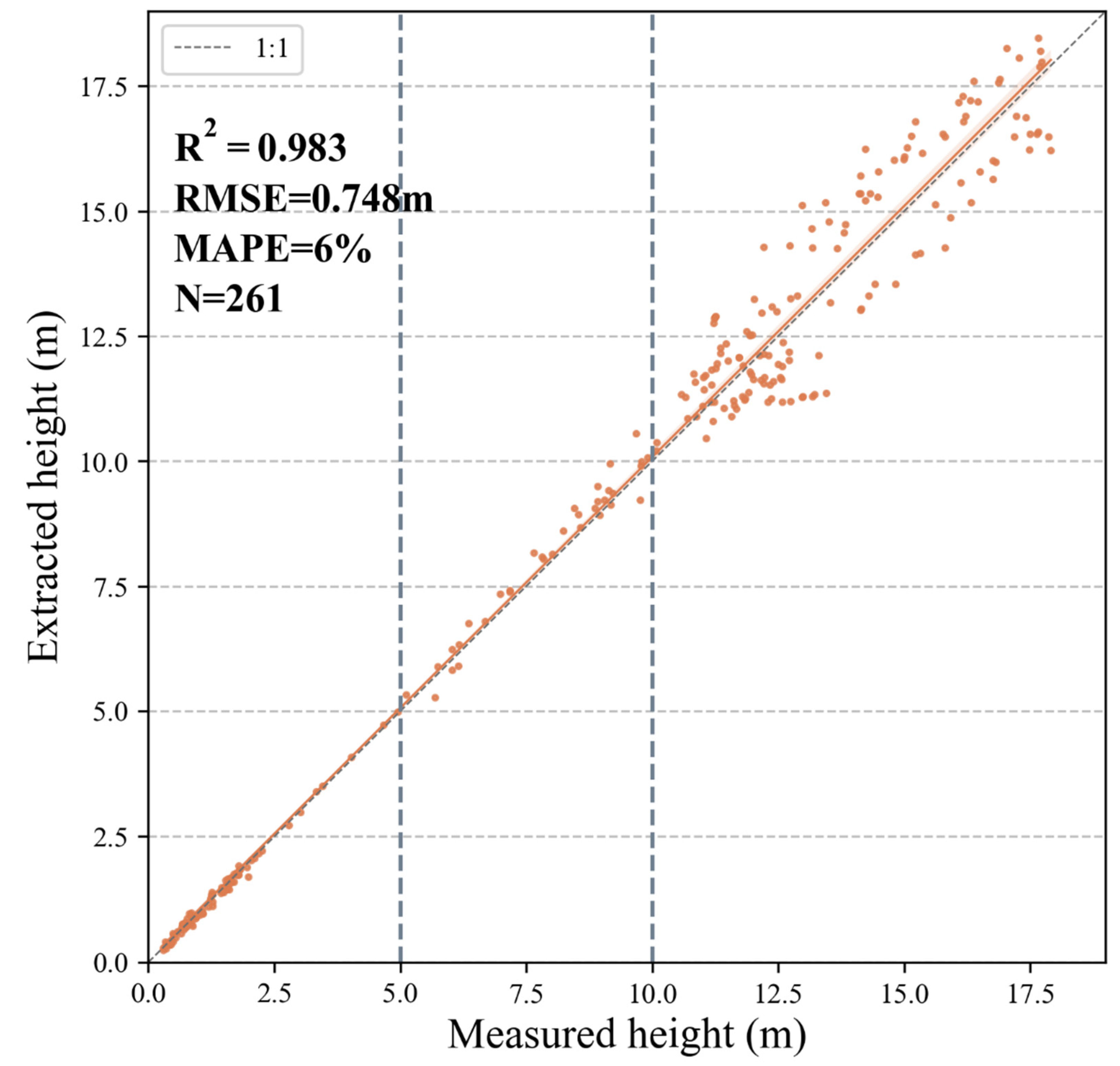
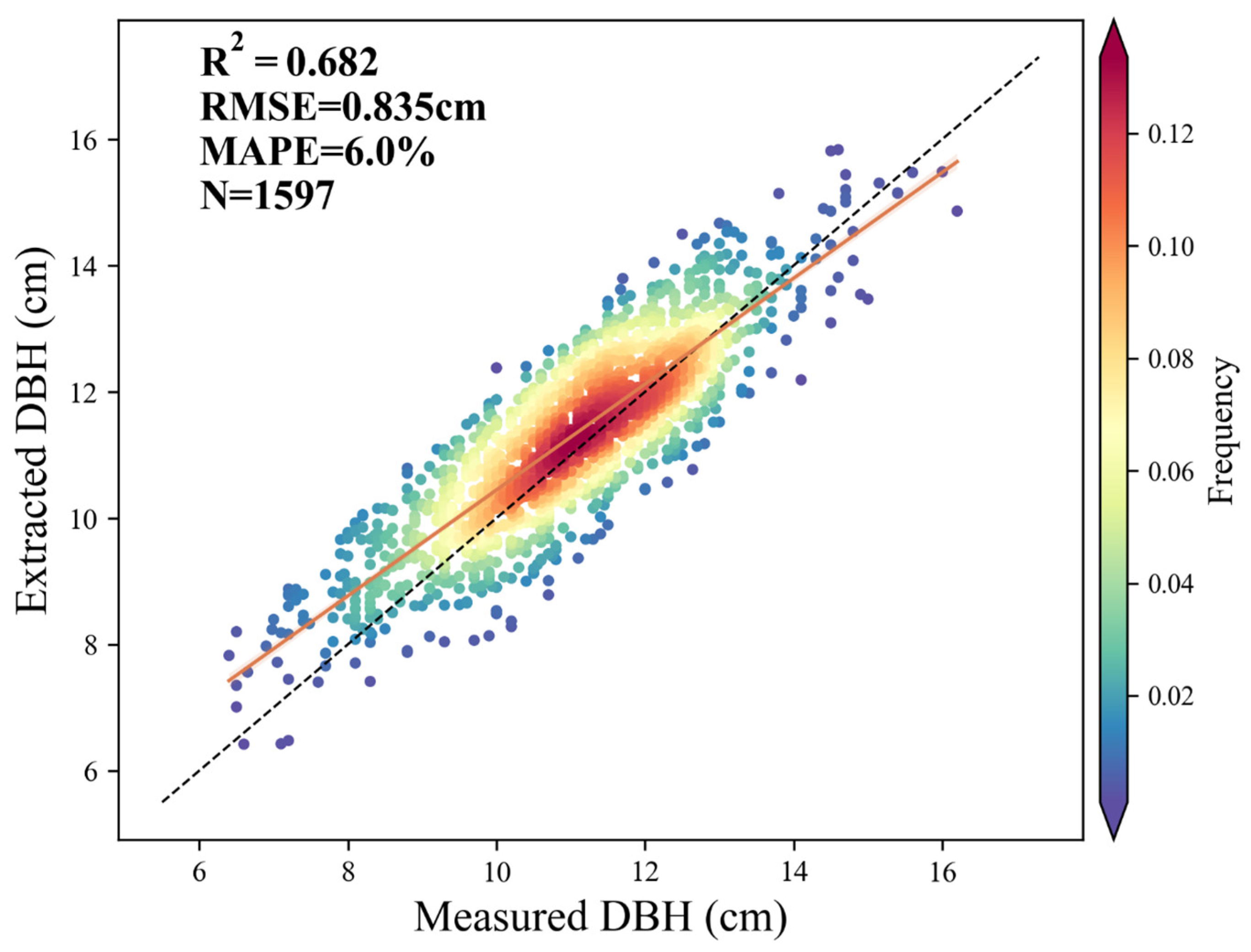
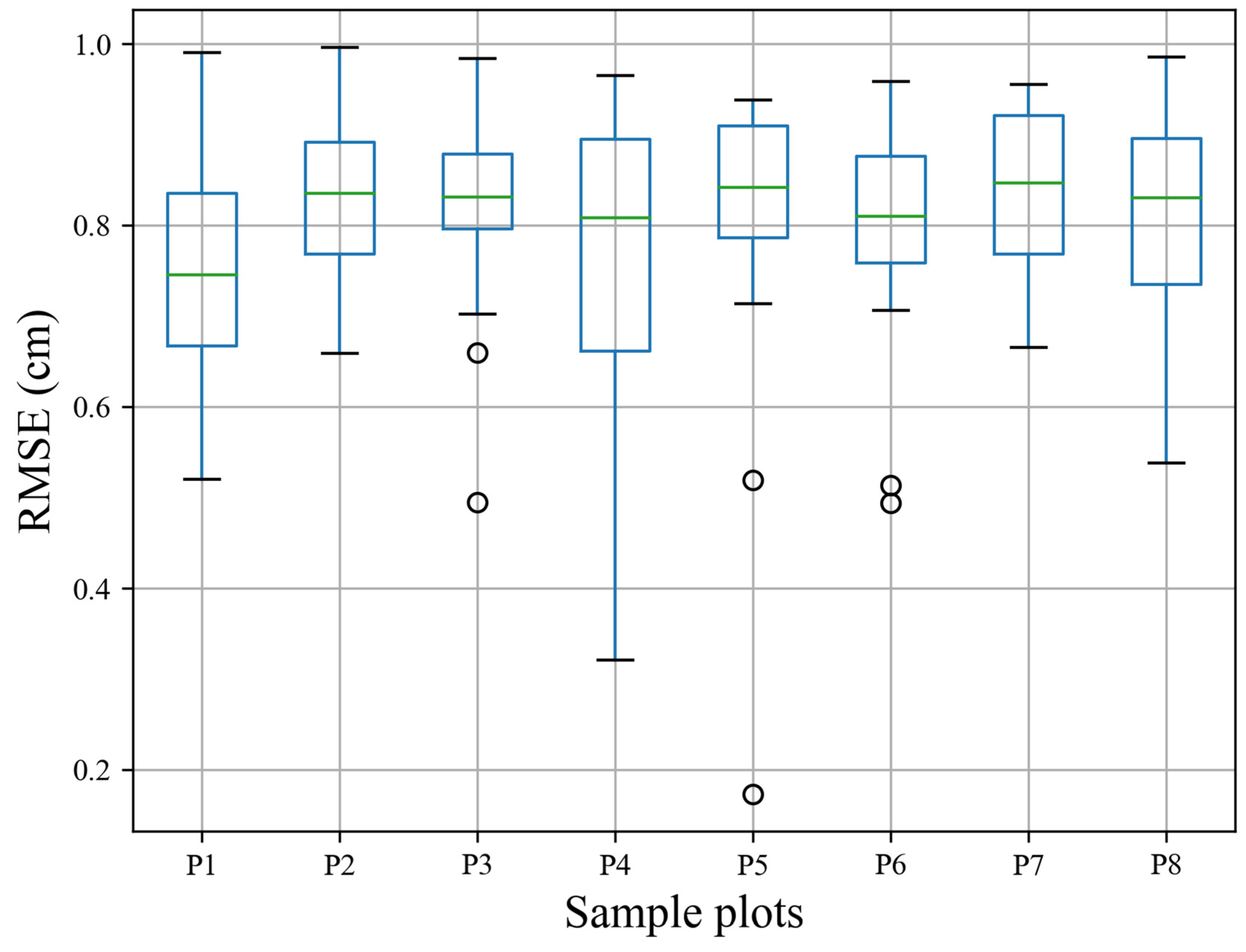
3.1. The Accuracy of Extracting Height and DBH
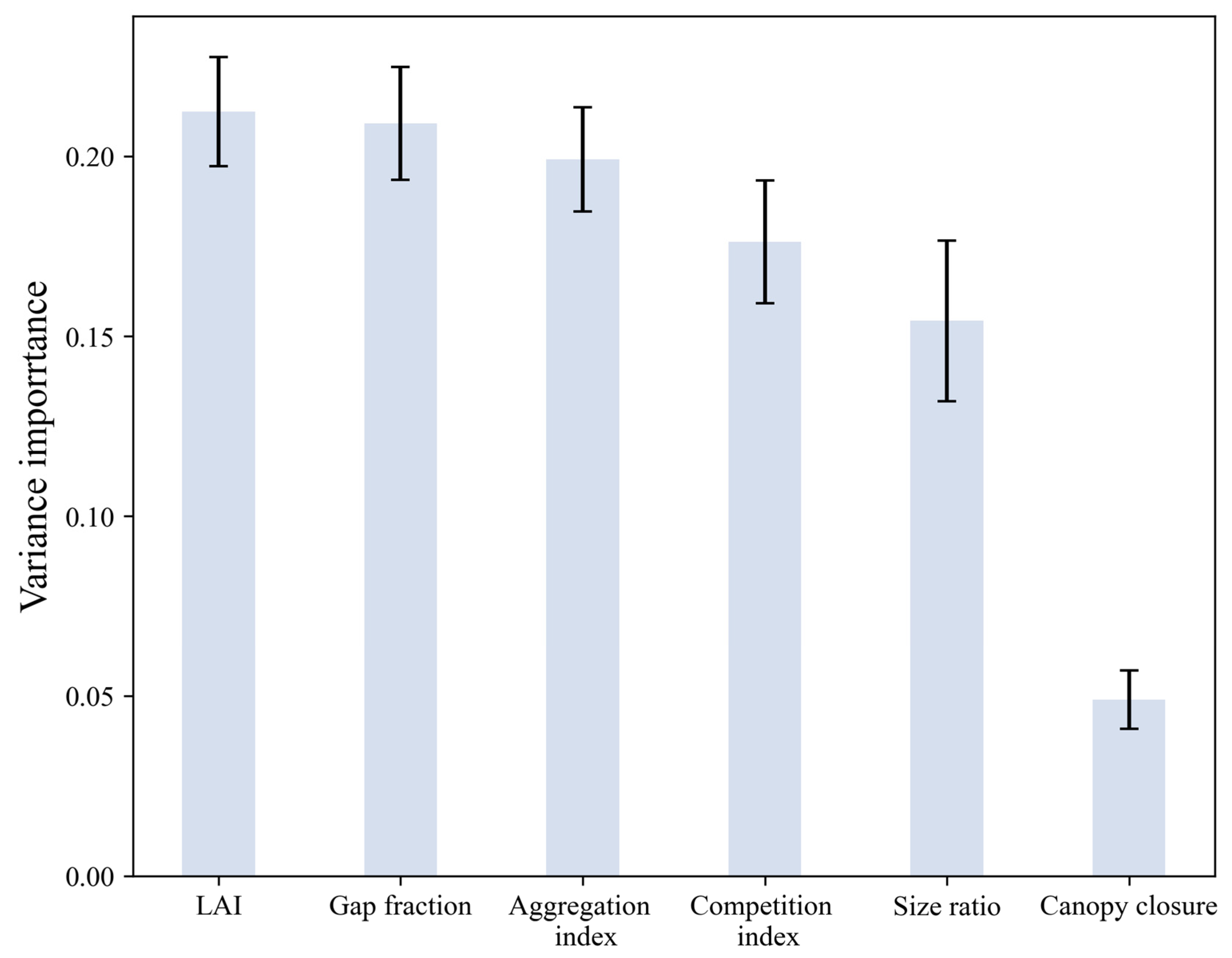
3.2. Results of Indicators Affecting Moso Bamboo Growth Rate
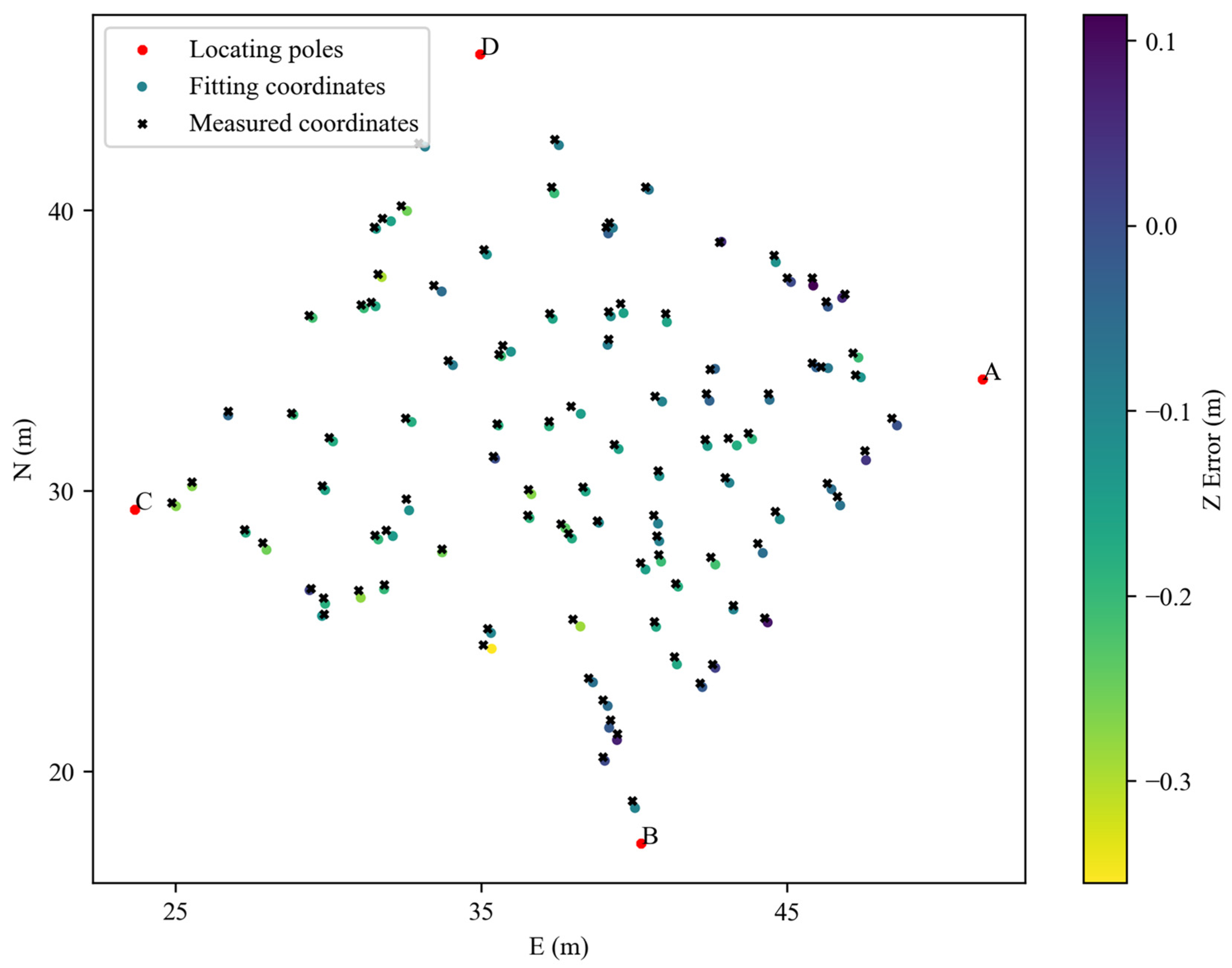
3.3. Positioning Error Derived from BLS Extraction
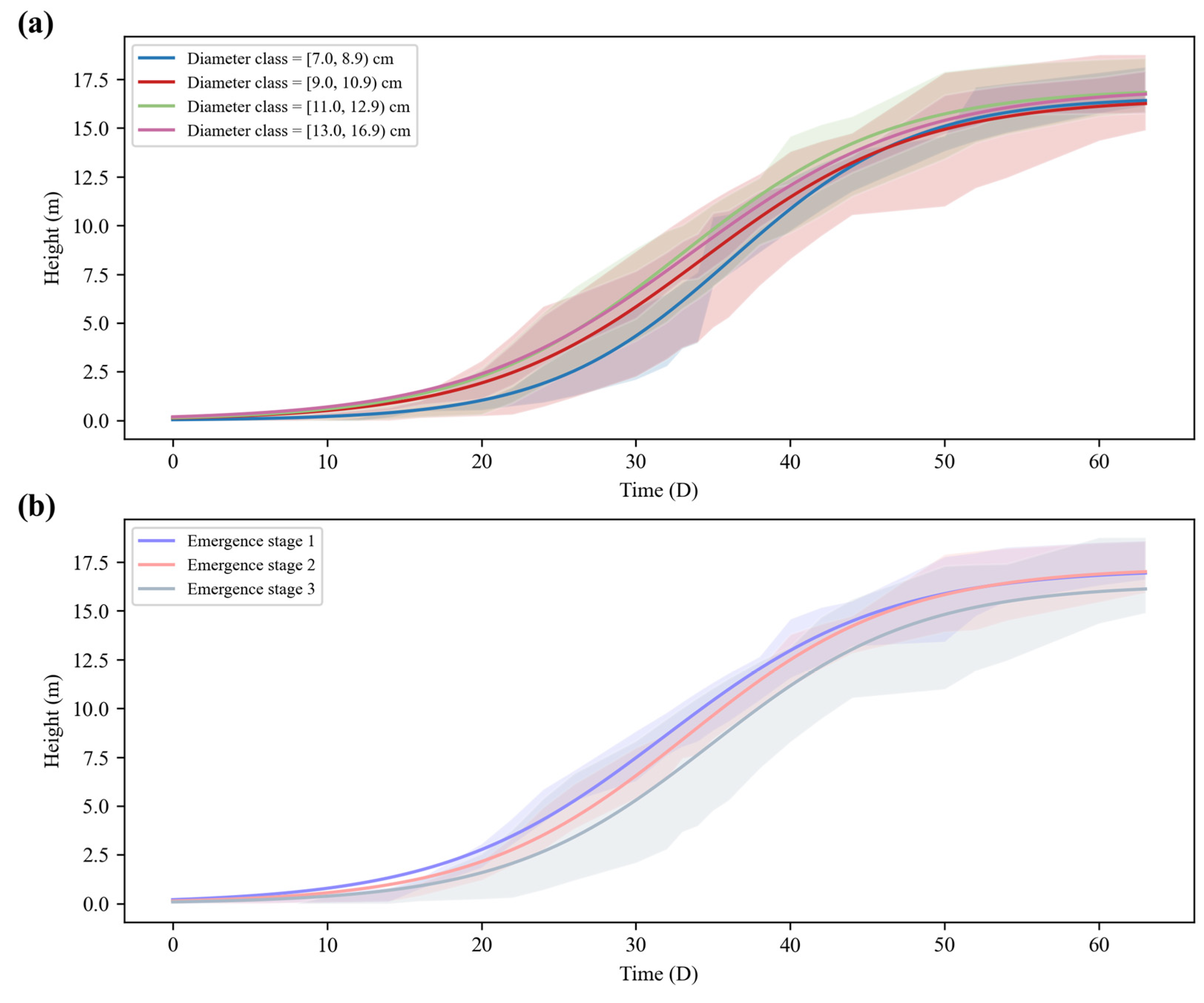
3.4. Height Growth Curves of Shoots with Different Diameter Class
3.5. Result of Spatial Structure of Moso Bamboo Forest on Carbon Storage of Shoots
4. Discussion
4.1. The Application of BLS in Extracting Bamboo Height and DBH
4.2. Influence of Moso Bamboo Size and Collection Trajectory on Location
4.3. Effect of Spatial Structure of Moso Bamboo Forest on Growth of Shoots
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fernández-Martínez, M.; Vicca, S.; Janssens, I.A.; Sardans, J.; Luyssaert, S.; Campioli, M.; Chapin Iii, F.S.; Ciais, P.; Malhi, Y.; Obersteiner, M.; et al. Nutrient availability as the key regulator of global forest carbon balance. Nat. Clim. Change 2014, 4, 471–476. [Google Scholar] [CrossRef]
- Pecl, G.T.; Araújo, M.B.; Bell, J.D.; Blanchard, J.; Bonebrake, T.C.; Chen, I.C.; Clark, T.D.; Colwell, R.K.; Danielsen, F.; Evengård, B.; et al. Biodiversity redistribution under climate change: Impacts on ecosystems and human well-being. Science 2017, 355, eaai9214. [Google Scholar] [CrossRef]
- Lee, H.; Calvin, K.; Dasgupta, D.; Krinner, G.; Mukherji, A.; Thorne, P.; Trisos, C.; Romero, J.; Aldunce, P.; Barret, K. IPCC, 2023: Climate Change 2023: Synthesis Report, Summary for Policymakers. Contribution of Working Groups I, II and III to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change; Core Writing Team, Lee, H., Romero, J., Eds.; IPCC: Geneva, Switzerland, 2023. [Google Scholar] [CrossRef]
- Bennedsen, M.; Hillebrand, E.; Koopman, S.J. A statistical model of the global carbon budget. Creat. Res. Pap. 2020, 22, 18986. [Google Scholar] [CrossRef]
- Mo, L.; Zohner, C.M.; Reich, P.B.; Liang, J.; Miguel, S.; Nabuurs, G.-J.; Renner, S.S.; van den Hoogen, J.; Araza, A.; Herold, M.; et al. Integrated global assessment of the natural forest carbon potential. Nature 2023, 624, 92–101. [Google Scholar] [CrossRef]
- Xiaoqing, Z.; Yijuan, W.; Liwei, L.; Yongcheng, X. On China’s Discourse Power and Corresponding Promotion Strategies in the Global Carbon Sequestration Market. J. Poyang Lake 2015, 5, 48–59. [Google Scholar] [CrossRef]
- Song, X.; Zhou, G.; Jiang, H.; Yu, S.; Fu, J.; Li, W.-Z.; Wang, W.; Ma, Z.; Peng, C. Carbon sequestration by Chinese bamboo forests and their ecological benefits: Assessment of potential, problems, and future challenges. Environ. Rev. 2011, 19, 418–428. [Google Scholar] [CrossRef]
- Düking, R.; Gielis, J.; Liese, W. Carbon Flux and Carbon Stock in a Bamboo Stand and their Relevance for Mitigating Climate Change. J. Am. Bamboo Soc. 2011, 24, 1–7. [Google Scholar]
- Pan, C.; Zhou, G.; Shrestha, A.K.; Chen, J.; Kozak, R.; Li, N.; Li, J.; He, Y.; Sheng, C.; Wang, G. Bamboo as a Nature-Based So-lution (NbS) for Climate Change Mitigation: Biomass, Products, and Carbon Credits. Climate 2023, 11, 175. [Google Scholar] [CrossRef]
- Yuen, J.Q.; Fung, T.; Ziegler, A.D. Carbon stocks in bamboo ecosystems worldwide: Estimates and uncertainties. For. Ecol. Manag. 2017, 393, 113–138. [Google Scholar] [CrossRef]
- Fu, J. Chinese Moso Bamboo: Its importance. Bamboo 2000, 22, 5–7. [Google Scholar]
- Zell, J. Climate Sensitive Tree Growth Functions and the Role of Transformations. Forests. 2018, 9, 382. [Google Scholar] [CrossRef]
- Ming, C.; Ye, J.; Zishan, A.; Zengfang, Y.; Yulong, D.; Feng, Q.; Jijun, Y.; Jinfang, C.; Qiang, W. Multi-analysis of sheath senes-cence provides new insights into bamboo shoot development at the fast growth stage. Tree Physiol. 2021, 41, 491–507. [Google Scholar] [CrossRef]
- Tao, G.-Y.; Ramakrishnan, M.; Vinod, K.K.; Yrjl, K.; Fu, Y. Multi-omics analysis of cellular pathways involved in different rapid growth stages of moso bamboo. Tree Physiol. 2020, 40, 1487–1508. [Google Scholar] [CrossRef]
- Zhou, X.; Guan, F.; Zhang, X.; Li, C.; Zhou, Y. Response of Moso Bamboo Growth and Soil Nutrient Content to Strip Cutting. Forests 2022, 13, 1293. [Google Scholar] [CrossRef]
- Sun, H.; Li, Q.; Lei, Z.; Zhang, J.; Song, X.; Song, X. Ecological stoichiometry of nitrogen and phosphorus in Moso bamboo (Phyllostachys edulis) during the explosive growth period of new emergent shoots. J. Plant Res. 2019, 132, 107–115. [Google Scholar] [CrossRef]
- Yen, T.-M. Culm height development, biomass accumulation and carbon storage in an initial growth stage for a fast-growing moso bamboo (Phyllostachy pubescens). Bot. Stud. 2016, 57, 10. [Google Scholar] [CrossRef]
- Shen, C.; Feng, Z.; Chen, P.; Chen, S.; Ullah, T. Research and evaluation of growth rate model for native chinese moso bam-boo. Appl. Ecol. Env. Res. 2020, 18, 1459–1470. [Google Scholar] [CrossRef]
- Zhang, T.; Yan, Q.; Wang, J.; Zhu, J. Restoring temperate secondary forests by promoting sprout regeneration: Effects of gap size and within-gap position on the photosynthesis and growth of stump sprouts with contrasting shade tolerance. For. Ecol. Manag. 2018, 429, 267–277. [Google Scholar] [CrossRef]
- Downey, M.; Valkonen, S.; Heikkinen, J. Natural tree regeneration and vegetation dynamics across harvest gaps in Norway spruce dominated forests in southern Finland. Can. J. For. Res. 2018, 48, 524–534. [Google Scholar] [CrossRef]
- Galvão, L.S.; Breunig, F.M.; Santos, J.R.D.; Moura, Y.M.D. View-illumination effects on hyperspectral vegetation indices in the Amazonian tropical forest. Int. J. Appl. Earth Obs. Geoinf. 2013, 21, 291–300. [Google Scholar] [CrossRef]
- Jin, S.; Sun, X.; Wu, F.; Su, Y.; Li, Y.; Song, S.; Xu, K.; Ma, Q.; Baret, F.; Jiang, D.; et al. Lidar sheds new light on plant phenomics for plant breeding and management: Recent advances and future prospects. ISPRS J. Photogramm. Remote Sens. 2021, 171, 202–223. [Google Scholar] [CrossRef]
- Li, A.; Glenn, N.F.; Olsoy, P.J.; Mitchell, J.J.; Shrestha, R. Aboveground biomass estimates of sagebrush using terrestrial and airborne LiDAR data in a dryland ecosystem. Agr. For. Meteorol. 2015, 213, 138–147. [Google Scholar] [CrossRef]
- Korpela, I.; Hovi, A.; Morsdorf, F. Understory trees in airborne LiDAR data—Selective mapping due to transmission losses and echo-triggering mechanisms. Remote Sens. Environ. 2012, 119, 92–104. [Google Scholar] [CrossRef]
- Cao, L.; Coops, N.C.; Sun, Y.; Ruan, H.; She, G. Estimating canopy structure and biomass in bamboo forests using airborne LiDAR data. ISPRS J. Photogramm. Remote Sens. 2019, 148, 114–129. [Google Scholar] [CrossRef]
- Li, W.; Niu, Z.; Liang, X.; Li, Z.; Huang, N.; Gao, S.; Wang, C.; Muhammad, S. Geostatistical modeling using LiDAR-derived prior knowledge with SPOT-6 data to estimate temperate forest canopy cover and above-ground biomass via stratified ran-dom sampling. Int. J. Appl. Earth Obs. Geoinf. 2015, 41, 88–98. [Google Scholar] [CrossRef]
- Jiang, R.; Lin, J.; Li, T. Refined Aboveground Biomass Estimation of Moso Bamboo Forest Using Culm Lengths Extracted from TLS Point Cloud. Remote Sens. 2022, 14, 5537. [Google Scholar] [CrossRef]
- Liang, D.; Zhang, C.; Zhang, P.; Liu, S.; Li, H.; Niu, S.; Rao, R.Z.; Zhao, L.; Chen, X.; Li, H.; et al. Evolution of laser technology for automotive LiDAR, an industrial viewpoint. Nat. Commun. 2024, 15, 7660. [Google Scholar] [CrossRef]
- Ma, X.; Zhu, K.; Guan, H.; Feng, J.; Yu, S.; Liu, G. Calculation Method for Phenotypic Traits Based on the 3D Reconstruction of Maize Canopies. Sensors 2019, 19, 1201. [Google Scholar] [CrossRef]
- Polewski, P.; Yao, W.; Cao, L.; Gao, S. Marker-free co-registration of UAV and backpack LiDAR point clouds in forested areas. ISPRS J. Photogramm. Remote Sens. 2019, 147, 307–318. [Google Scholar] [CrossRef]
- Ko, C.; Lee, S.; Yim, J.S.; Kang, J. Comparison of Forest Inventory Methods at Plot-Level between a Backpack Personal Laser Scanning (BPLS) and Conventional Equipment in Jeju Island, South Korea. Forests 2021, 12, 308. [Google Scholar] [CrossRef]
- Lu, J.; Wang, H.; Qin, S.; Cao, L.; Pu, R.; Li, G.; Sun, J. Estimation of aboveground biomass of Robinia pseudoacacia forest in the Yellow River Delta based on UAV and Backpack LiDAR point clouds. Int. J. Appl. Earth Obs. Geoinf. 2020, 86, 102014. [Google Scholar] [CrossRef]
- Polewski, P.; Erickson, A.; Yao, W.; Coops, N.; Krzystek, P.; Stilla, U. Object-based coregistration of terrestrial photogrammet-ric and ALS point clouds in forested areas. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, III-3, 347–354. [Google Scholar] [CrossRef]
- Xie, Y.; Yang, T.; Wang, X.; Chen, X.; Pang, S.; Hu, J.; Wang, A.; Chen, L.; Shen, Z. Applying a Portable Backpack Lidar to Measure and Locate Trees in a Nature Forest Plot: Accuracy and Error Analyses. Remote Sens. 2022, 14, 1806. [Google Scholar] [CrossRef]
- Hyyppä, E.; Kukko, A.; Kaijaluoto, R.; White, J.C.; Wulder, M.A.; Pyörälä, J.; Liang, X.; Yu, X.; Wang, Y.; Kaartinen, H.; et al. Accurate derivation of stem curve and volume using backpack mobile laser scanning. ISPRS J. Photogramm. Remote Sens. 2020, 161, 246–262. [Google Scholar] [CrossRef]
- Guan, H.; Su, Y.; Hu, T.; Wang, R.; Guo, Q. A Novel Framework to Automatically Fuse Multiplatform LiDAR Data in Forest Environments Based on Tree Locations. IEEE Trans. Geosci. Remote Sens. 2020, 58, 2165–2177. [Google Scholar] [CrossRef]
- Ali, A.-S.; Nikolai, C. Error analysis for circle fitting algorithms. Electron. J. Stat. 2009, 3, 886–911. [Google Scholar] [CrossRef]
- Raumonen, P.; Kaasalainen, M.; Åkerblom, M.; Kaasalainen, S.; Kaartinen, H.; Vastaranta, M.; Holopainen, M.; Disney, M.; Lewis, P. Fast Automatic Precision Tree Models from Terrestrial Laser Scanner Data. Remote Sens. 2013, 5, 491–520. [Google Scholar] [CrossRef]
- Wang, Y.; Lehtomäki, M.; Liang, X.; Pyörälä, J.; Kukko, A.; Jaakkola, A.; Liu, J.; Feng, Z.; Chen, R.; Hyyppä, J. Is field-measured tree height as reliable as believed—A comparison study of tree height estimates from field measurement, airborne laser scanning and terrestrial laser scanning in a boreal forest. ISPRS J. Photogramm. Remote Sens. 2019, 147, 132–145. [Google Scholar] [CrossRef]
- Rusu, R.B.; Cousins, S. 3D is here: Point Cloud Library (PCL). In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011. [Google Scholar] [CrossRef]
- Tao, S.; Wu, F.; Guo, Q.; Wang, Y.; Li, W.; Xue, B.; Hu, X.; Li, P.; Tian, D.; Li, C.; et al. Segmenting tree crowns from terrestrial and mobile LiDAR data by exploring ecological theories. ISPRS J. Photogramm. Remote Sens. 2015, 110, 66–76. [Google Scholar] [CrossRef]
- Chen, C.; Zhao, N.; Yue, T.; Guo, J. A generalization of inverse distance weighting method via kernel regression and its ap-plication to surface modeling. Arab. J. Geosci. 2015, 8, 6623–6633. [Google Scholar] [CrossRef]
- Zhang, R.; Zhou, X.; Ouyang, Z.; Avitabile, V.; Qi, J.; Chen, J.; Giannico, V. Estimating aboveground biomass in subtropical forests of China by integrating multisource remote sensing and ground data. Remote Sens. Environ. 2019, 232, 111341. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.-P.; Sander, J.; Xu, X. A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. In Proceedings of the Knowledge Discovery and Data Mining, Portland, OR, USA, 2–4 August 1996. [Google Scholar] [CrossRef]
- Swayze, N.C.; Tinkham, W.T.; Vogeler, J.C.; Hudak, A.T. Influence of flight parameters on UAS-based monitoring of tree height, diameter, and density. Remote Sens. Environ. 2021, 263, 112540. [Google Scholar] [CrossRef]
- Ruhan, A.; Du, W.; Ying, H.; Wei, B.; Shan, Y.; Dai, H. Estimation of Aboveground Biomass of Individual Trees by Backpack LiDAR Based on Parameter-Optimized Quantitative Structural Models (AdQSM). Forests 2023, 14, 475. [Google Scholar] [CrossRef]
- O’Rourke, J. Finding minimal enclosing boxes. Int. J. Comput. Inf. Sci. 1985, 14, 183–199. [Google Scholar] [CrossRef]
- Shalabi, L.A.A.; Shaaban, Z.; Kasasbeh, B. Data Mining: A Preprocessing Engine. J. Comput. Sci. 2006, 2, 735–739. [Google Scholar] [CrossRef]
- Dong, L.; Bettinger, P.; Liu, Z.; Qin, H. A comparison of a neighborhood search technique for forest spatial harvest scheduling problems: A case study of the simulated annealing algorithm. For. Ecol. Manag. 2015, 356, 124–135. [Google Scholar] [CrossRef]
- Xie, Y.; Zhang, J.; Chen, X.; Pang, S.; Zeng, H.; Shen, Z. Accuracy assessment and error analysis for diameter at breast height measurement of trees obtained using a novel backpack LiDAR system. For. Ecosyst. 2020, 7, 33. [Google Scholar] [CrossRef]
- Qian, C.; Liu, H.; Tang, J.; Chen, Y.; Kaartinen, H.; Kukko, A.; Zhu, L.; Liang, X.; Chen, L.; Hyyppä, J. An Integrated GNSS/INS/LiDAR-SLAM Positioning Method for Highly Accurate Forest Stem Mapping. Remote Sens. 2017, 9, 3. [Google Scholar] [CrossRef]
- Pan, L.; Mei, G.; Wang, Y.; Saeed, S.; Chen, L.; Cao, Y.; Sun, Y. Generalized Nonlinear Mixed-Effect Model of Individual TREE Height to Crown Base for Larix Olgensis Henry in Northeast China. J. Sustain. For. 2020, 39, 827–840. [Google Scholar] [CrossRef]
- Chen, S.; Jiang, H.; Cai, Z.; Zhou, X.; Peng, C. The response of the net primary production of Moso bamboo forest to the On and Off-year management: A case study in Anji County, Zhejiang, China. For. Ecol. Manag. 2018, 409, 1–7. [Google Scholar] [CrossRef]
- Clark, P.J.; Evans, F.C. Distance to Nearest Neighbor as a Measure of Spatial Relationships in Populations. Ecology 1954, 35, 445–453. [Google Scholar] [CrossRef]
- Bristow, M.; Vanclay, J.K.; Brooks, L.O.; Hunt, M.A. Growth and Species Interactions of Eucalyptus pellita in a Mixed and Monoculture Plantation in the H. For. Ecol. Manag. 2006, 233, 285–294. [Google Scholar] [CrossRef]
- Richardson, J.J.; Moskal, L.M.; Kim, S.H. Modeling approaches to estimate effective leaf area index from aerial discrete-return LIDAR. Agr. For. Meteorol. 2009, 149, 1152–1160. [Google Scholar] [CrossRef]
- Ma, Q.; Su, Y.; Guo, Q. Comparison of Canopy Cover Estimations From Airborne LiDAR, Aerial Imagery, and Satellite Imagery. IEEE J.-Stars 2017, 10, 4225–4236. [Google Scholar] [CrossRef]
- Li, W.; Migliavacca, M.; Forkel, M.; Denissen, J.M.C.; Reichstein, M.; Yang, H.; Duveiller, G.; Weber, U.; Orth, R. Widespread increasing vegetation sensitivity to soil moisture. Nat. Commun. 2022, 13, 3959. [Google Scholar] [CrossRef]
- Ziter, C.D.; Pedersen, E.J.; Kucharik, C.J.; Turner, M.G. Scale-dependent interactions between tree canopy cover and imper-vious surfaces reduce daytime urban heat during summer. Proc. Natl. Acad. Sci. USA 2019, 116, 7575–7580. [Google Scholar] [CrossRef]
- Zhou, G. Carbon Storage, Fixation and Distribution in Mao Bamboo (Phyllostachys pubescens) Stands Ecosystem. Ph.D. Thesis, Zhejiang University, Hangzhou, China, 2006. [Google Scholar]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Gonzalez-Ollauri, A.; Stokes, A.; Mickovski, S.B. A novel framework to study the effect of tree architectural traits on stemflow yield and its consequences for soil-water dynamics. J. Hydrol. 2020, 582, 124448. [Google Scholar] [CrossRef]
- Su, Y.J.; Guo, Q.H.; Jin, S.C.; Guan, H.C.; Sun, X.L.; Ma, Q.; Hu, T.Y.; Wang, R.; Li, Y.M. The Development and Evaluation of a Backpack LiDAR System for Accurate and Efficient Forest Inventory. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1660–1664. [Google Scholar] [CrossRef]
- Mur-Artal, R.; Tardós, J.D. Visual-Inertial Monocular SLAM with Map Reuse. IEEE Robot. Autom. Let. 2017, 2, 796–803. [Google Scholar] [CrossRef]
- Endres, F.; Hess, J.; Sturm, J.; Cremers, D.; Burgard, W. 3-D Mapping with an RGB-D Camera. IEEE Trans. Robot. 2014, 30, 177–187. [Google Scholar] [CrossRef]
- Omelko, A.; Ukhvatkina, O.; Zhmerenetsky, A.; Sibirina, L.; Petrenko, T.; Bobrovsky, M. From young to adult trees: How spatial patterns of plants with different life strategies change during age development in an old-growth Korean pine-broadleaved forest. For. Ecol. Manag. 2018, 411, 46–66. [Google Scholar] [CrossRef]
- Kumar, A.; Verulkar, S.; Dixit, S.; Chauhan, B.; Bernier, J.; Venuprasad, R.; Zhao, D.; Shrivastava, M.N. Yield and yield-attributing traits of rice (Oryza sativa L.) under lowland drought and suitability of early vigor as a selection criterion. Field Crop Res. 2009, 114, 99–107. [Google Scholar] [CrossRef]
- Wang, Q.; Zhang, L.; Gan, X. Adaptability of the structure and biomass of Arundinaria spanostachya clonal populations graz-ing by wild giant pandas. Environ. Sci. Pollut. Res. 2020, 27, 2909–2918. [Google Scholar] [CrossRef]
- Xie, J.; Hong, M. Effects of ecological factors on growth of Arundinaria spanostachya shoots in Liziping National Nature Re-serve, China. Glob. Ecol. Conserv. 2020, 23, e01121. [Google Scholar] [CrossRef]
- Zhang, L.; Gan, X.; Hou, Z.; Yang, Z.; Zhang, Z. Grazing by wild giant pandas does not affect the regeneration of Arundinaria spanostachya. J. For. Res. 2019, 30, 1513–1520. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample Plot | Number of Moso Bamboo | DBH (cm) | |||
|---|---|---|---|---|---|
| Mean | Min | Max | SD | ||
| P1 | 100 | 12.31 | 7.00 | 16.20 | 1.53 |
| P2 | 90 | 12.15 | 7.70 | 15.60 | 1.71 |
| P3 | 106 | 12.01 | 5.50 | 15.20 | 1.69 |
| P4 | 108 | 11.63 | 7.20 | 15.40 | 1.73 |
| P5 | 115 | 11.41 | 7.00 | 15.71 | 1.90 |
| P6 | 81 | 11.70 | 8.10 | 14.40 | 1.40 |
| P7 | 112 | 11.08 | 6.50 | 15.60 | 1.65 |
| P8 | 80 | 11.94 | 7.20 | 15.00 | 1.55 |
| Parameters | LiBackpack DGC50 |
|---|---|
| Laser sensor | Velodyne Puck VLP-16 × 2 |
| Precision | ±3 cm |
| Accuracy | ±5 cm |
| Range capability | 100 m |
| Point frequency | 600,000 (pts/s) |
| Scan mode | Color |
| Scanning mode | Horizontal 16-line repetitive scanning |
| Vertical 32-line repetitive scanning | |
| Wavelength | 903 nm |
| Viewing angle range | Horizontal 360° |
| Vertical 180° |
| Bamboo Attributes | Acquisition Trajectory | Point Cloud Quality | Terrain |
|---|---|---|---|
| Diameter Class | DS | Intensity | Surface Roughness |
| Distance to the Nearest Bamboo | DT | Quantity | Slope of Aspect of DEM |
| Cumulative Distance | Density | Slope |
| Indicators | Mu | Mu_star | Sigma | Mu_star_conf (95%) |
|---|---|---|---|---|
| LAI | 0.85 | 0.92 | 0.21 | [0.80, 1.04] |
| R | 0.50 | 0.55 | 0.15 | [0.45, 0.65] |
| Diameter Class | 0.02 | 0.03 | 0.01 | [0.01, 0.05] |
| CI | −0.60 | 0.65 | 0.30 | [0.55, 0.75] |
| GF | 0.62 | 0.68 | 0.25 | [0.58, 0.78] |
| U | 0.10 | 0.12 | 0.05 | [0.08, 0.16] |
| CC | −0.05 | 0.06 | 0.02 | [0.03, 0.09] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Li, C.; Pan, C.; Yan, Y.; Zhou, Y.; Sun, J.; Zhou, G. Harnessing Backpack Lidar Technology: A Novel Approach to Monitoring Moso Bamboo Shoot Growth. Forests 2025, 16, 371. https://doi.org/10.3390/f16020371
Li C, Li C, Pan C, Yan Y, Zhou Y, Sun J, Zhou G. Harnessing Backpack Lidar Technology: A Novel Approach to Monitoring Moso Bamboo Shoot Growth. Forests. 2025; 16(2):371. https://doi.org/10.3390/f16020371
Chicago/Turabian StyleLi, Chen, Chong Li, Chunyu Pan, Yancun Yan, Yufeng Zhou, Jingyi Sun, and Guomo Zhou. 2025. "Harnessing Backpack Lidar Technology: A Novel Approach to Monitoring Moso Bamboo Shoot Growth" Forests 16, no. 2: 371. https://doi.org/10.3390/f16020371
APA StyleLi, C., Li, C., Pan, C., Yan, Y., Zhou, Y., Sun, J., & Zhou, G. (2025). Harnessing Backpack Lidar Technology: A Novel Approach to Monitoring Moso Bamboo Shoot Growth. Forests, 16(2), 371. https://doi.org/10.3390/f16020371