

Comparison and Evaluation the Forest Spatial Data in the Context of Modeling Terrain Passability for Operational Purposes



Abstract
1. Introduction
1.1. Related Papers
1.2. Research Purpose
2. Materials and Methods
2.1. Test Area
2.2. Used Data
- Vector Map Level 2 (VML2, military development, the timeliness of the information 2014). This database has a level of detail similar to that of a military topographic map at a 1:50,000 scale. It encompasses nine object categories including borders, relief, physiography, transport, buildings, hydrography, vegetation, and air traffic infrastructure. The database structure adheres to the DIGEST standard. Due to its high level of detail and cost, this product has not been created for the entire area of interest of the NATO alliance. The forest data were extracted from the layer “FORESTA_AFT”.
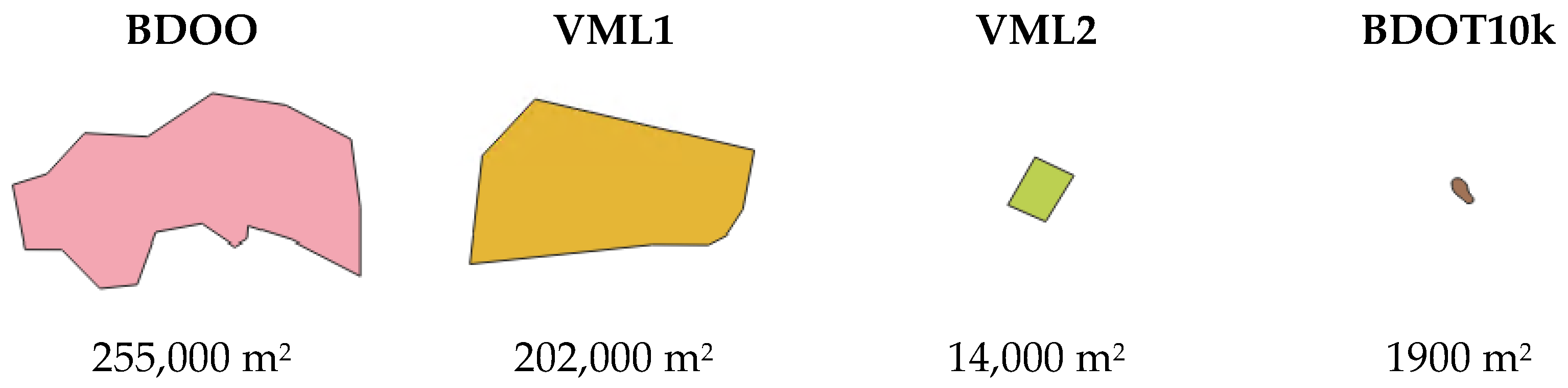
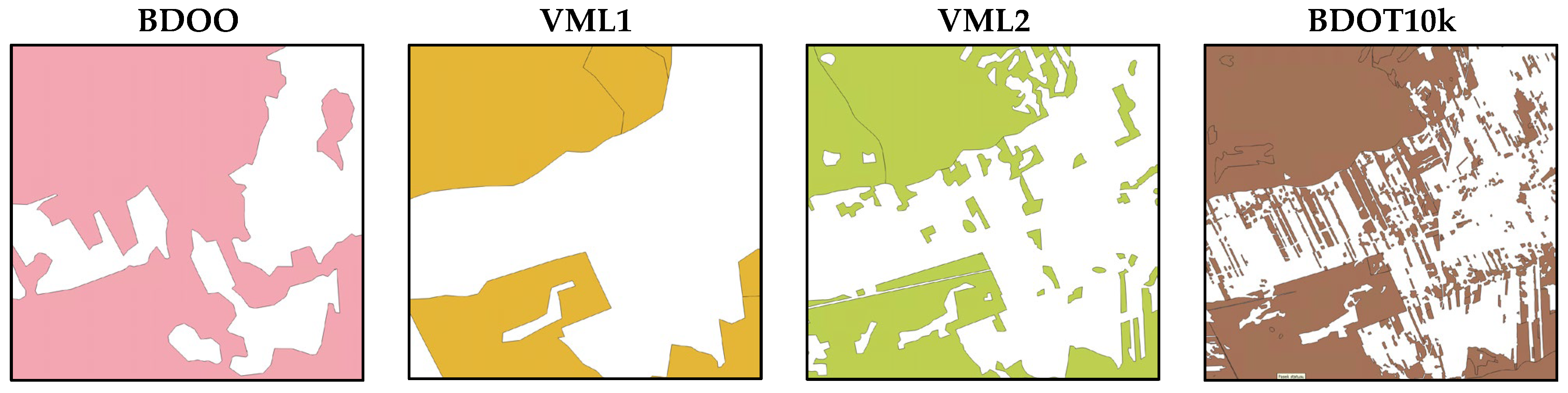
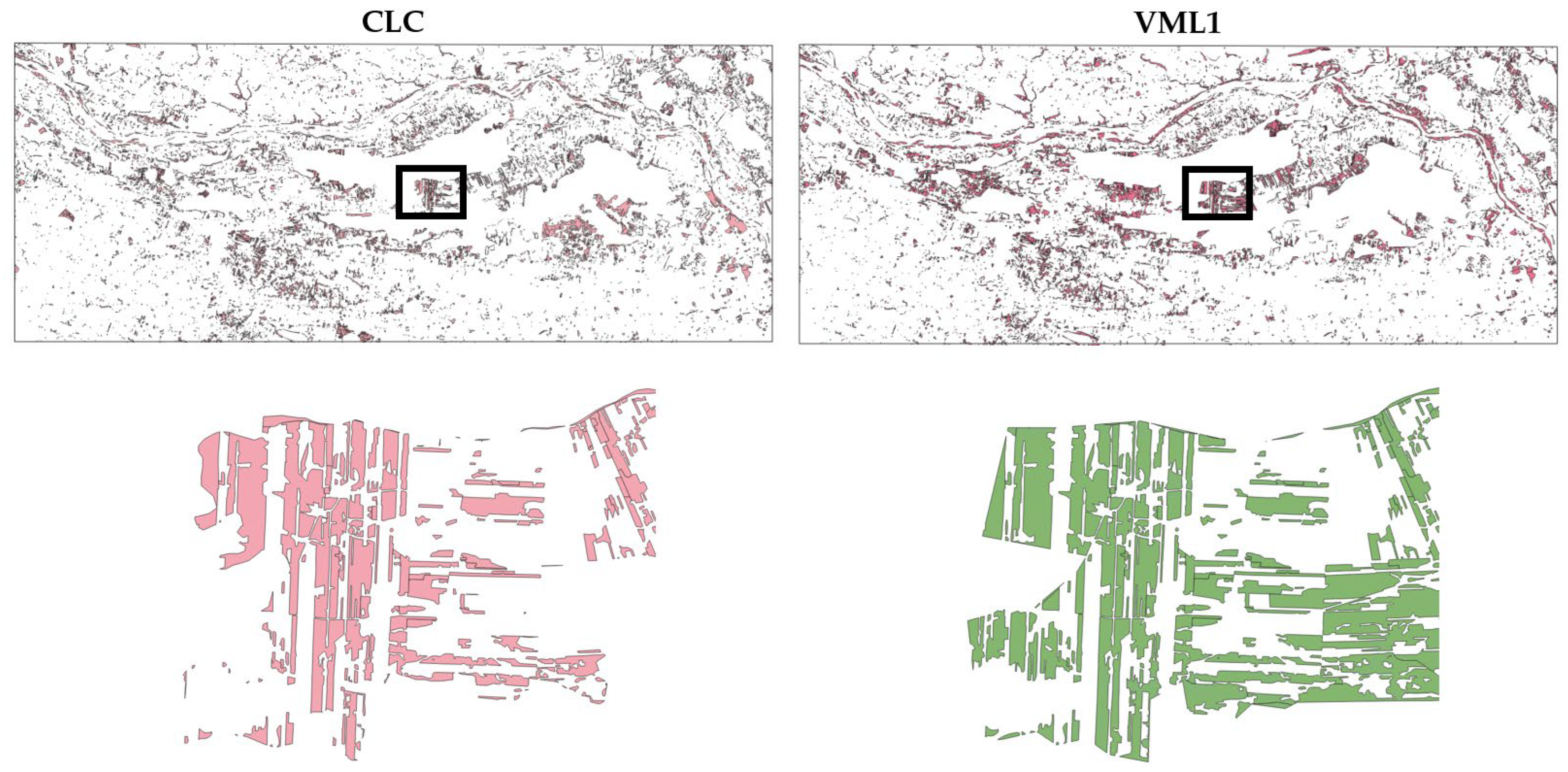
- Vector Map Level 1 (VML1, military development, the timeliness of the information 2014). This map aligns with the information found on a military operational map, Joint Operations Graphics (JOG), at a 1:250,000 scale. It represents the first global military vector product. The data scope and encoding method are similar to VML2. The creators of this product are the military geographic services of NATO member countries. This project is no longer being developed, and the data used for the research date back to 2006 [41]. The forest data were extracted from the layer “FORESTA_AFT”.
- Corine Land Cover (CLC, civil development, the timeliness of the information 2018). These data provide information on land cover and land use across Europe, collected in regular cycles, typically every six years. It also includes details about changes occurring between cycles. The database focuses exclusively on surface features categorized into the following classes: urban areas, agricultural land, forests, wetlands, and water bodies. Since the CLC2000 project, the European Environment Agency (EEA) has been responsible for coordinating the CLC projects at the European level. This study utilized the most recent version of the CLC data from 2018 [42]. The forest data were extracted using query: “code_18” LIKE ‘31_’.
- BDOT10k (Topographic Object Database at a scale of 1:10,000, civil development, the timeliness of the information 2021). This database matches the level of detail found in a topographic map at a scale of 1:10,000. It serves as a foundational reference dataset and is included in the State Geodetic and Cartographic Resource. The dataset organizes objects into nine categories: water networks, transport networks, land infrastructure networks, land cover, buildings, structures and facilities, land use complexes, protected areas, administrative units, and other objects [43]. These data are available from the Polish National Geoportal [44]. The forest data were extracted from the layer “PTLZ01”.
- BDOO (General Geographic Object Database, civil development, the timeliness of the information 2021). This database corresponds to a map with a scale of 1:250,000 and was developed by generalizing data from BDOT10k. As a result, both datasets share a similar structure and organization [43]. These data are available from the Polish National Geoportal [44]. The forest data were extracted from the layer “PTLZ”.
- OSM (OpenStreetMap, community-driven project, the timeliness of the information 2024). This project aims to develop a free and publicly accessible map of the entire Earth. The database is built using data contributed by registered users, sourced from GPS tracks, satellite imagery, maps in the public domain, and the users’ local knowledge of the areas they edit. Along with general geographic information, the database includes descriptive details presented as points of interest (POIs) [40]. Data have been downloaded from publicly available sources [45]. The forest data were extracted using the query: “landuse” = ‘forest’ or “natural” = ‘wood’).
2.3. Method
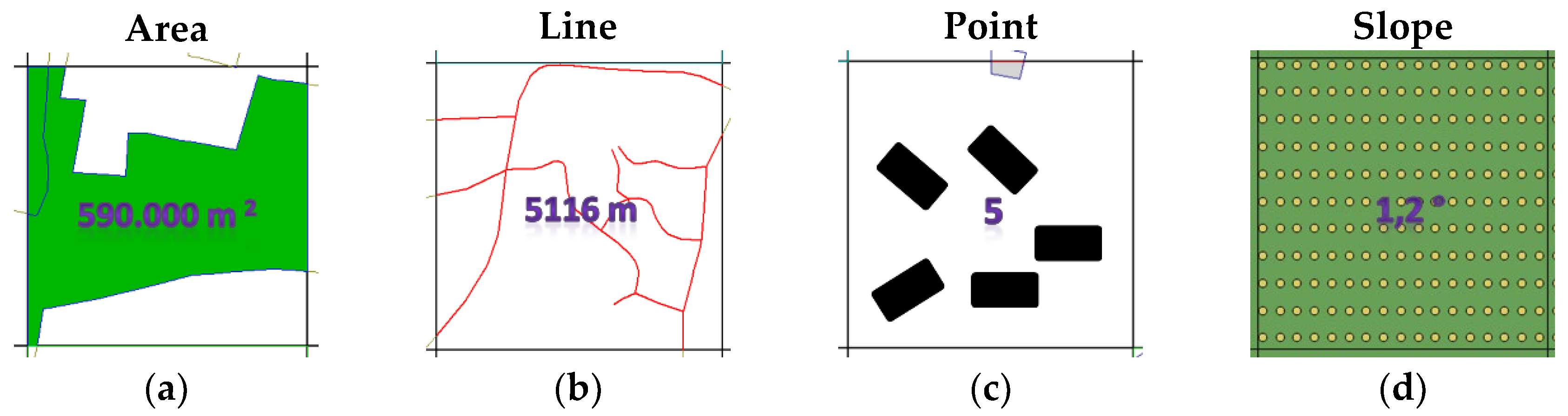
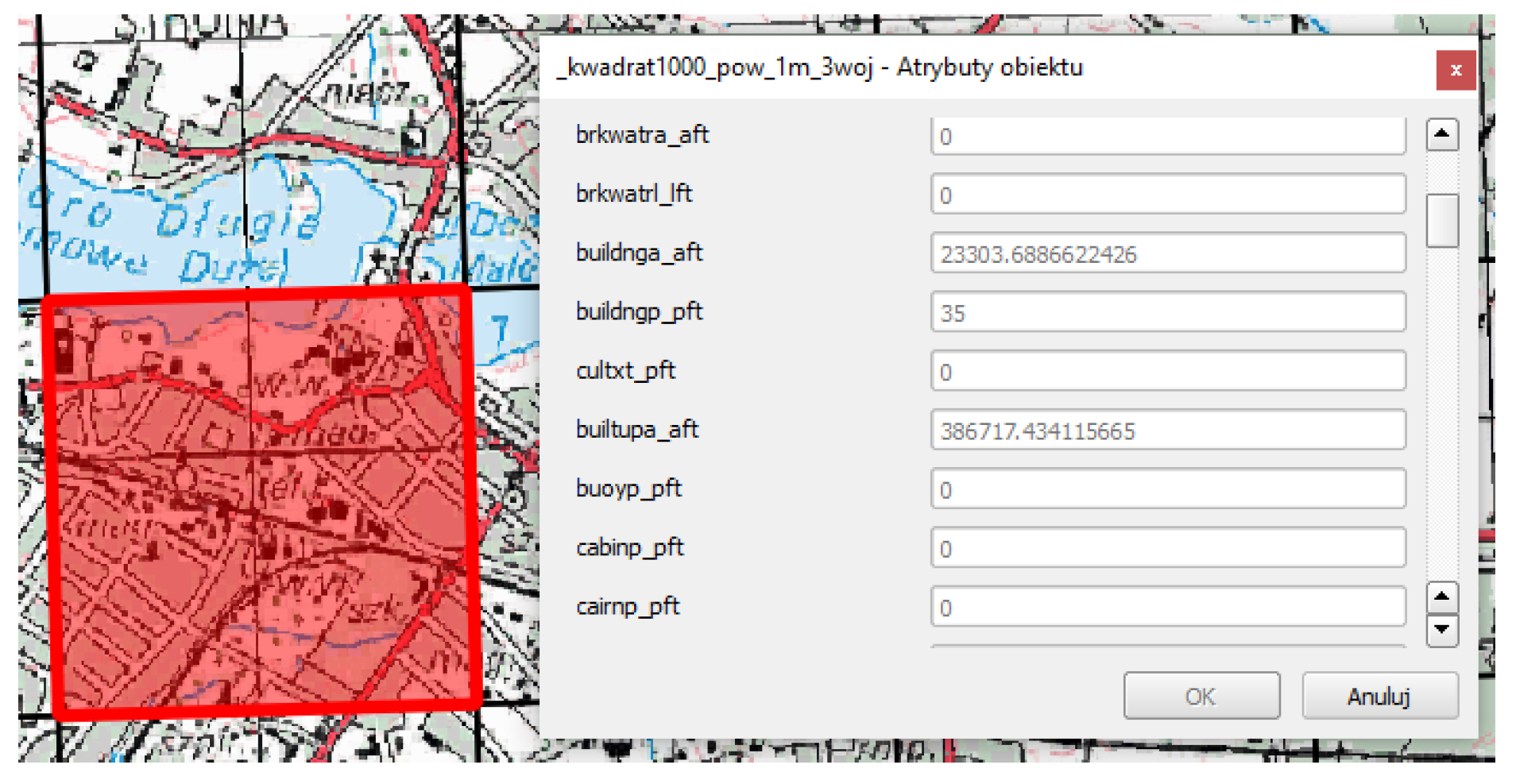
- Surface objects (e.g., forests, lakes, built-up areas): The total surface area of each type of object within the primary field.
- Linear objects (e.g., rivers, roads, railways, contour lines): The total length of linear features within the primary field.
- Singular objects (e.g., buildings, enclosures): The total number of such objects in the primary field.
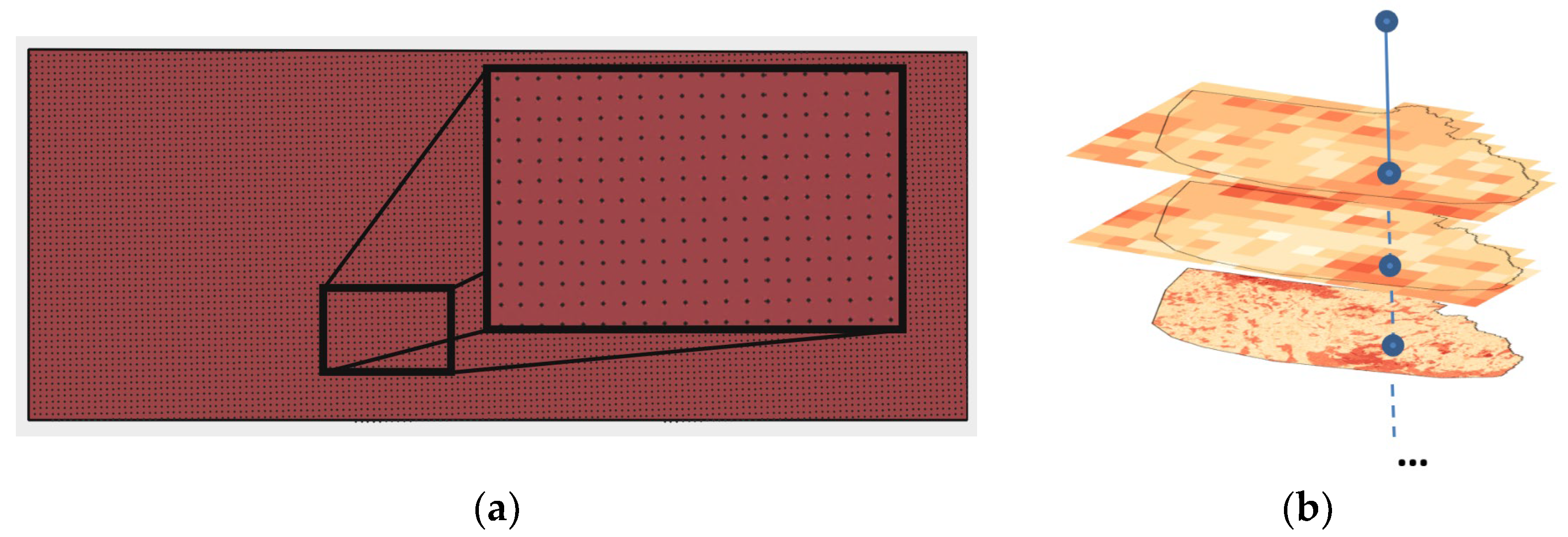
- Normalization of land cover data: The land cover data for each primary field are normalized to a range of 0 to 1.
- Assignment of VRF coefficients: A VRF coefficient is assigned to each object category. Object classes are grouped as follows: those that obstruct passability (IVRF < 0), those that facilitate passability (IVRF > 0), and those that do not affect passability (mainly point objects, IVRF = 0).The parameters can be freely adjusted by defining custom VRF coefficients, making the method adaptable.
- The passability index is determined using the following equation:where:
- ○
- is the index of passability of the primary field I;
- ○
- for surface objects is the normalized surface (located inside the primary field i) of objects from the n1 thematic category;
- ○
- for linear objects, is the normalised length (located inside the primary field i) of objects from the n2 thematic category;
- ○
- for point objects, is the normalised number (located inside the primary field i) of objects from the n3 thematic category;
- ○
- is the vegetation roughness factor for object classes n1, n2, and n3.
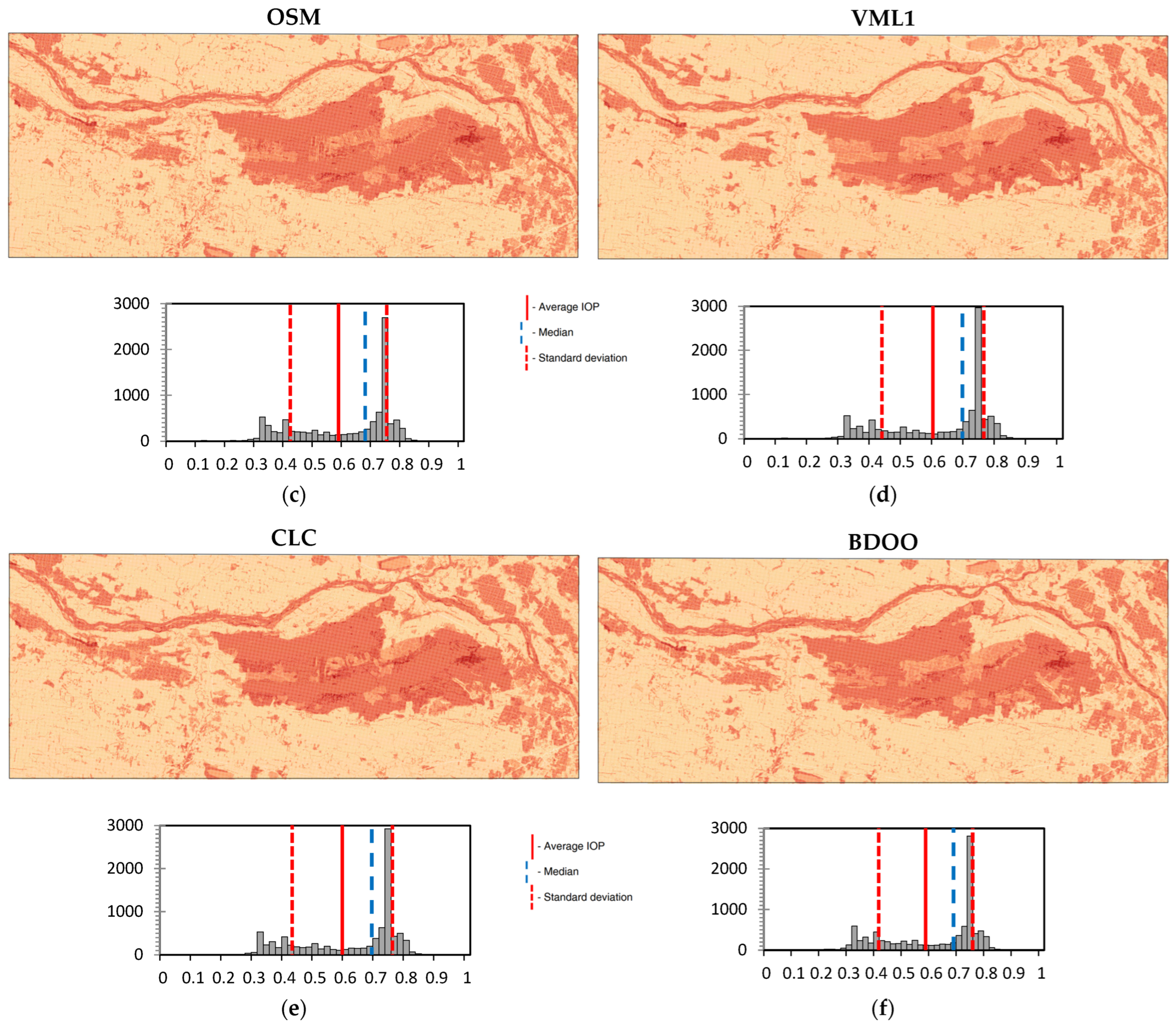
Equation (1) incorporates all object classes present in the spatial database. A specific class can be excluded from the analysis by either removing it or assigning it an IVRF of 0, meaning that it does not influence the passability. - The resulting IOP values are then normalized to a continuous scale ranging from 0 to 1.
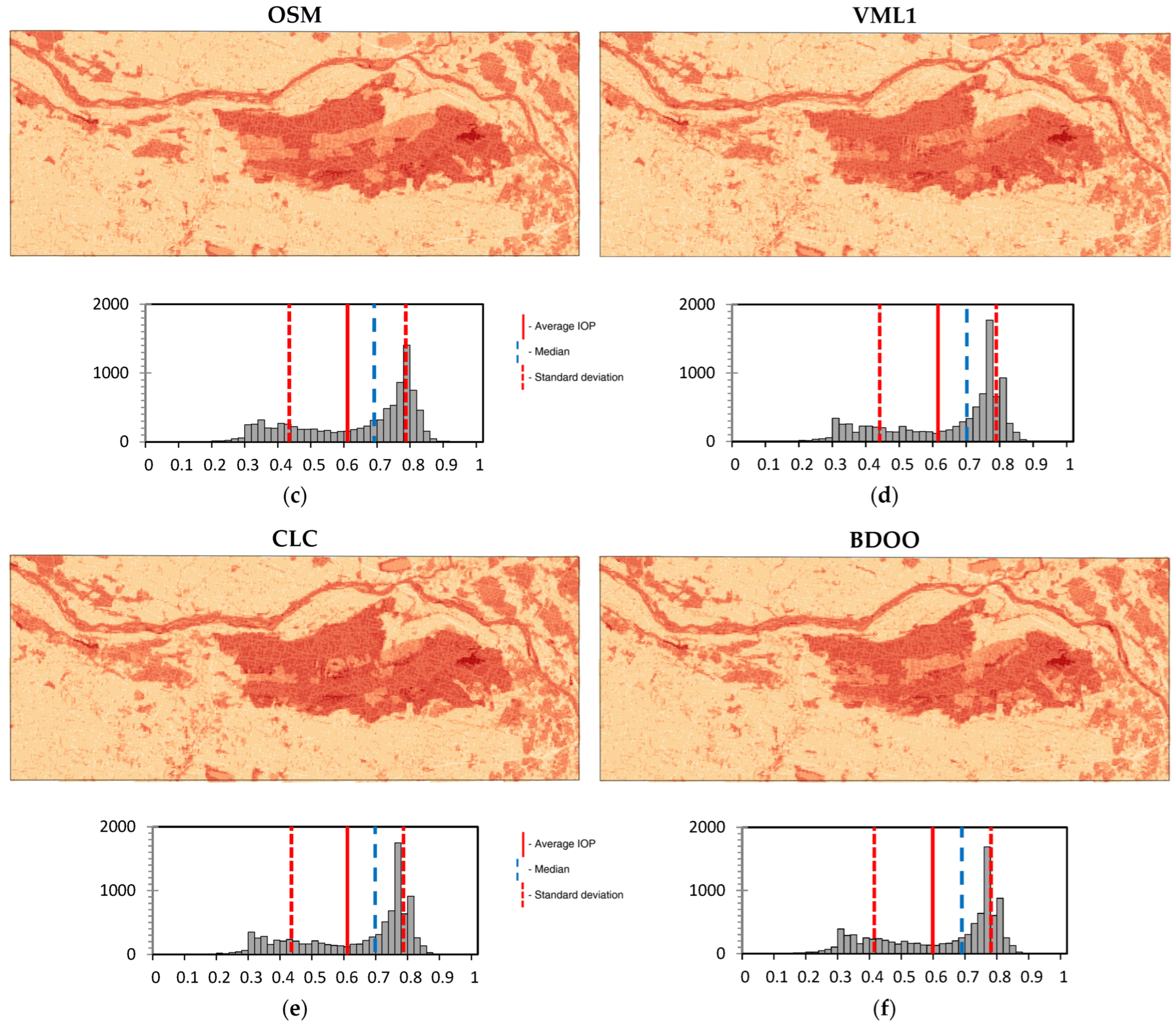
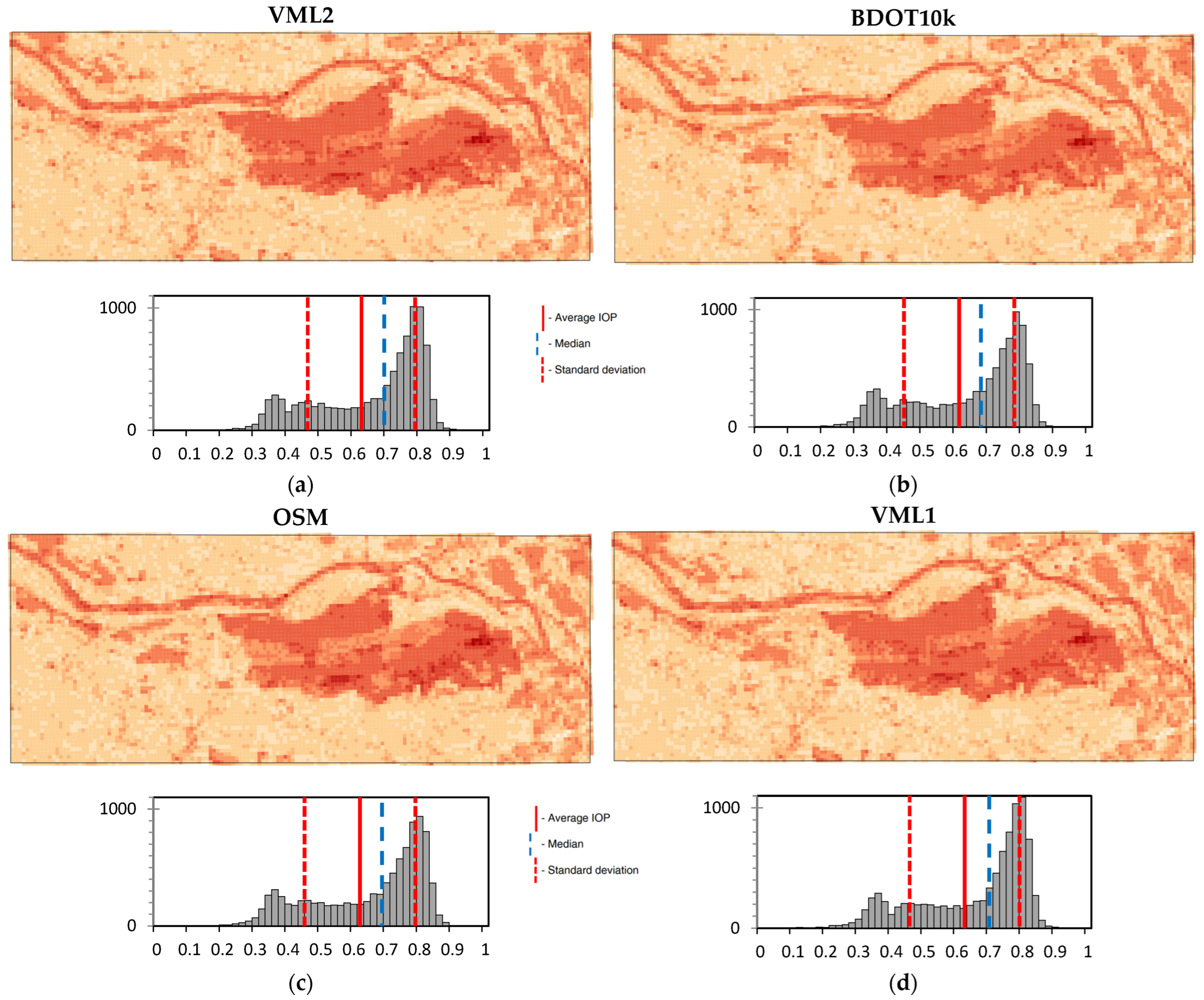
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rybansky, M. Effect of the Geographic Factors on the Cross Country Movement During Military Operations and the Natural Disasters; Rerucha, V., Ed.; Univ Defence: Brno, Czeh Republic, 2007; ISBN 978-80-7231-238-2. [Google Scholar]
- Field Manual No. 5-33 Terrain Analysis. 1990. Available online: http://www.bits.de/NRANEU/others/amd-us-archive/fm5-33(90).pdf (accessed on 23 November 2024).
- NO-06-A015:2012; Terrain—Rules of Classification—Terrain Analysis on Operational Level 2012. Polish National Standardization Document: Warsaw, Poland, 2012; unpublished work.
- Rybansky, M. Trafficability Analysis through Vegetation. In Proceedings of the 2017 International Conference on Military Technologies (ICMT), Brno, Czech Republic, 31 May–2 June 2017; pp. 207–210. [Google Scholar]
- Rybansky, M. Determination of Forest Structure from Remote Sensing Data for Modeling the Navigation of Rescue Vehicles. Appl. Sci. 2022, 12, 3939. [Google Scholar] [CrossRef]
- Čapek, J.; Zerzán, P.; Šimková, K. Influence of Tree Spacing on Vehicle Manoeuvers in Forests. In Proceedings of the 2019 International Conference on Military Technologies (ICMT), Brno, Czech Republic, 30–31 May 2019; pp. 1–7. [Google Scholar]
- Hyyppae, J.M.; Pyysalo, U.; Hyyppae, H.; Haggren, H.G.; Ruppert, G.S. Accuracy of Laser Scanning for DTM Generation in Forested Areas. In Laser Radar Technology and Applications V; SPIE: Bellingham, WD, USA, 2000; Volume 4035. [Google Scholar]
- Rybansky, M.; Dohnal, F.; Hoskova-Mayerova, S.; Svatonova, H. The Impact of Drainage on Terrain UGV Movement. IOP Conf. Ser. Earth Environ. Sci. 2018, 169, 012021. [Google Scholar] [CrossRef]
- Kapi, A.Y.; Sunar, M.S.; Algfoor, Z.A. Summary of Pathfinding in Off-Road Environment. In Proceedings of the 2020 6th International Conference on Interactive Digital Media (ICIDM), Virtual, 14–15 December 2020; pp. 1–4. [Google Scholar]
- Abd Algfoor, Z.; Sunar, M.S.; Kolivand, H. A Comprehensive Study on Pathfinding Techniques for Robotics and Video Games. Int. J. Comput. Games Technol. 2015, 2015, e736138. [Google Scholar] [CrossRef]
- Borges, C.D.B.; Almeida, A.M.A.; Paula Júnior, I.C.; Sá Junior, J.J.d.M. A Strategy and Evaluation Method for Ground Global Path Planning Based on Aerial Images. Expert Syst. Appl. 2019, 137, 232–252. [Google Scholar] [CrossRef]
- Pokonieczny, K.; Borkowska, S. Using High Resolution Spatial Data to Develop Military Maps of Passability. In Proceedings of the 2019 International Conference on Military Technologies (ICMT), Brno, Czech Republic, 30–31 May 2019; pp. 1–8. [Google Scholar]
- Pokonieczny, K. Comparison of Land Passability Maps Created with Use of Different Spatial Data Bases. Geografie 2018, 123, 317–352. [Google Scholar] [CrossRef]
- Hubacek, M.; Ceplova, L.; Brenova, M.; Mikita, T.; Zerzan, P. Analysis of Vehicle Movement Possibilities in Terrain Covered by Vegetation; IEEE: Piscataway, NJ, USA, 2015; pp. 1–5. [Google Scholar]
- Hofmann, A.; Hošková-Mayerová, Š.; Talhofer, V.; Kovařík, V. Creation of Models for Calculation of Coefficients of Terrain Passability. Qual. Quant. 2014, 49, 1679–1691. [Google Scholar] [CrossRef]
- Pokonieczny, K. Use of a Multilayer Perceptron to Automate Terrain Assessment for the Needs of the Armed Forces. ISPRS Int. J. Geo-Inf. 2018, 7, 430. [Google Scholar] [CrossRef]
- Rybansky, M.; Hofmann, A.; Hubacek, M.; Kovarik, V.; Talhofer, V. Modelling of Cross-Country Transport in Raster Format. Environ Earth Sci. 2015, 74, 7049–7058. [Google Scholar] [CrossRef]
- Dawid, W.; Pokonieczny, K. Analysis of the Possibilities of Using Different Resolution Digital Elevation Models in the Study of Microrelief on the Example of Terrain Passability. Remote Sens. 2020, 12, 4146. [Google Scholar] [CrossRef]
- Hubáček, M.; Rybansky, M.; Cibulova, K.; Brenov, M.; Ceplova, L. Mapping the Passability of Soils for Vehicle Movement. KVÜÕA Toimetised 2015, 5–18. [Google Scholar]
- Jayakumar, P.; Mechergui, D.; Wasfy, T.M. Understanding the Effects of Soil Characteristics on Mobility. In International Design Engineering Technical Conferences and Computers and Information in Engineering Conference; American Society of Mechanical Engineers: New York, NY, USA, 2017. [Google Scholar] [CrossRef]
- Rybansky, M. Soil Trafficability Analysis. In Proceedings of the International Conference on Military Technologies (ICMT) 2015, Brno, Czech Republic, 19–21 May 2015; pp. 1–5. [Google Scholar]
- Shoop, S.; Knuth, M.; Wieder, W. Measuring Vehicle Impacts on Snow Roads. J. Terramechanics 2013, 50, 63–71. [Google Scholar] [CrossRef]
- McCullough, M.; Jayakumar, P.; Dasch, J.; Gorsich, D. The Next Generation NATO Reference Mobility Model Development. J. Terramechanics 2017, 73, 49–60. [Google Scholar] [CrossRef]
- Paramsothy, J.; Bradbury, M.; Dasch, J.; Gonzalez, R.; Hodges, H.; Jain, A.; Iagnemma, K.; Letherwood, M.; McCullough, M.; Priddy, J.; et al. Next-Generation NATO Reference Mobility Model (NRMM) Development. J. Terramechanics 2018, 73, 49–60. [Google Scholar]
- Gonzalez, R.; Jayakumar, P.; Iagnemma, K. An Efficient Method for Increasing the Accuracy of Mobility Maps for Ground Vehicles. J. Terramechanics 2016, 68, 23–35. [Google Scholar] [CrossRef]
- Lessem, A.; Mason, G.; Ahlvin, R. Stochastic Vehicle Mobility Forecasts Using the Nato Reference Mobility Model. J. Terramechanics 1996, 33, 273–280. [Google Scholar] [CrossRef]
- Maclaurin, B. Comparing the NRMM (VCI), MMP and VLCI Traction Models. J. Terramechanics 2007, 44, 43–51. [Google Scholar] [CrossRef]
- Capek, J.; Hubacek, M.; Kristalova, D.; Mertova, E. Effect of Tree Location Accuracy on Vegetation Passability Analysis. In Proceedings of the 2023 International Conference on Military Technologies (ICMT), Brno, Czech Republic, 23–26 May 2023; pp. 1–6. [Google Scholar]
- Talhofer, V.; Hošková-Mayerová, Š. Spatial Data Quality in Multi-Criterial Analysis for Decision Making Process. Adv. Cartogr. GIScience ICA 2019, 1, 1–8. [Google Scholar] [CrossRef]
- Rada, J.; Rybansky, M.; Dohnal, F. Influence of Quality of Remote Sensing Data on Vegetation Passability by Terrain Vehicles. ISPRS Int. J. Geo-Inf. 2020, 9, 684. [Google Scholar] [CrossRef]
- Mikita, T.; Rybansky, M.; Krausková, D.; Dohnal, F.; Vystavěl, O.; Hollmannová, S. Mapping Forest Parameters to Model the Mobility of Terrain Vehicles. Forests 2024, 15, 1882. [Google Scholar] [CrossRef]
- Kristalova, D.; Capek, J.; Adamek, R.; Nohel, J.; Kriz, J. Practical Applicability of Tree Spacing Passability Analysis on Vehicle Path Planning. In Modelling and Simulation for Autonomous Systems; Mazal, J., Fagiolini, A., Vasik, P., Pacillo, F., Bruzzone, A., Pickl, S., Stodola, P., Eds.; Springer Nature: Cham, Switzerland, 2025; pp. 68–91. [Google Scholar]
- Sehra, S.; Singh, J.; Rai, H. Assessment of OpenStreetMap Data—A Review. Int. J. Comput. Appl. 2013, 76, 17–20. [Google Scholar]
- Borkowska, S.; Bielecka, E.; Pokonieczny, K. OpenStreetMap—Building Data Completeness Visualization in Terms of “Fitness for Purpose”. Adv. Geod. Geoinf. 2023, 72, e35. [Google Scholar] [CrossRef]
- Goodchild, M.F.; Li, L. Assuring the Quality of Volunteered Geographic Information. Spat. Stat. 2012, 1, 110–120. [Google Scholar] [CrossRef]
- Talhofer, V.; Hošková-Mayerová, Š.; Hofmann, A. Improvement of Digital Geographic Data Quality. Int. J. Prod. Res. 2012, 50, 4846–4859. [Google Scholar] [CrossRef]
- Grinberger, A.Y.; Minghini, M.; Juhász, L.; Yeboah, G.; Mooney, P. OSM Science—The Academic Study of the OpenStreetMap Project, Data, Contributors, Community, and Applications. ISPRS Int. J. Geo-Inf. 2022, 11, 230. [Google Scholar] [CrossRef]
- Goodchild, M.F.; Gopal, S. (Eds.) The Accuracy of Spatial Databases; CRC Press: London, UK, 1989; ISBN 978-0-429-20831-7. [Google Scholar]
- Bank Danych o Lasach. Available online: https://www.bdl.lasy.gov.pl/portal/ (accessed on 20 December 2024).
- OpenStreetMap Wiki. Available online: https://wiki.openstreetmap.org/wiki/Main_Page (accessed on 17 July 2018).
- STANAG 7163; Vector Map (VMAP) Level 1 2003. NATO Standardization Document: Washington, DC, USA, 2013; unpublished work.
- CORINE Land Cover—Copernicus Land Monitoring Service. Available online: http://land.copernicus.eu/pan-european/corine-land-cover (accessed on 1 October 2017).
- Rozporządzenie Ministra Rozwoju, Pracy i Technologii z Dnia 23 Lipca 2021 r. w Sprawie Bazy Danych Obiektów Topograficznych Oraz Mapy Zasadniczej. Available online: https://isap.sejm.gov.pl/isap.nsf/DocDetails.xsp?id=WDU20210001385 (accessed on 15 May 2024).
- geoportal.gov.pl. Available online: https://mapy.geoportal.gov.pl/imap/Imgp_2.html?gpmap=gp0 (accessed on 15 December 2024).
- Geofabrik Download Server. Available online: https://download.geofabrik.de/europe/poland.html (accessed on 15 December 2024).
- Pokonieczny, K. Automatic Military Passability Map Generation System. In Proceedings of the 2017 International Conference on Military Technologies (ICMT), Brno, Czech Republic, 31 May–2 June 2017; pp. 285–292. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Database | Area of Forests [km2] | Percentage of Coverage of the Test Area | No. of Features |
|---|---|---|---|
| BDOO | 659.75 | 28.02 | 133 |
| BDOT10k | 638.55 | 27.12 | 12,717 |
| CLC | 527.61 | 22.40 | 262 |
| OSM | 610.49 | 25.92 | 11,353 |
| VML1 | 485.95 | 20.64 | 99 |
| VML2 | 502.77 | 21.35 | 1272 |
| Total area of the test area | 2354.94 km2 |
| Database | Area of the Common Forest Layer Relative to BDOT10k [km2] | Percentage of Coverage of the Common Area in Relation to BDOT 10k [%] |
|---|---|---|
| BDOO | 539.35 | 84.5 |
| BDOT10k | 638.55 | 100.0 |
| CLC | 475.25 | 74.4 |
| OSM | 568.08 | 89.0 |
| VML1 | 445.23 | 69.7 |
| VML2 | 471.90 | 73.9 |
| Average | Std. Dev. | Median | Skewness | Pearson Correlation Coefficient | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| VML2 | BDOT10k | OSM | VML1 | CLC | BDOO | |||||
| VML2 | 0.61 | 0.16 | 0.71 | −0.75 | 1 | 0.970 | 0.970 | 0.967 | 0.966 | 0.944 |
| BDOT10k | 0.60 | 0.17 | 0.69 | −0.66 | 1 | 0.988 | 0.957 | 0.963 | 0.963 | |
| OSM | 0.60 | 0.17 | 0.69 | −0.69 | 1 | 0.959 | 0.966 | 0.960 | ||
| VML1 | 0.61 | 0.16 | 0.71 | −0.82 | 1 | 0.961 | 0.944 | |||
| CLC | 0.61 | 0.16 | 0.71 | −0.76 | 1 | 0.951 | ||||
| BDOO | 0.60 | 0.17 | 0.70 | −0.66 | 1 | |||||
| Average | Std. Dev. | Median | Skewness | Pearson Correlation Coefficient | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| VML2 | BDOT10k | OSM | VML1 | CLC | BDOO | |||||
| VML2 | 0.64 | 0.16 | 0.71 | −0.78 | 1 | 0.980 | 0.979 | 0.973 | 0.974 | 0.954 |
| BDOT10k | 0.63 | 0.17 | 0.69 | −0.72 | 1 | 0.992 | 0.966 | 0.972 | 0.972 | |
| OSM | 0.64 | 0.17 | 0.71 | −0.74 | 1 | 0.967 | 0.973 | 0.969 | ||
| VML1 | 0.64 | 0.17 | 0.72 | −0.85 | 1 | 0.964 | 0.949 | |||
| CLC | 0.64 | 0.17 | 0.71 | −0.80 | 1 | 0.957 | ||||
| BDOO | 0.63 | 0.18 | 0.70 | −0.72 | 1 | |||||
| Average | Std. Dev. | Median | Skewness | Pearson Correlation Coefficient | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| VML2 | BDOT10k | OSM | VML1 | CLC | BDOO | |||||
| VML2 | 0.62 | 0.17 | 0.71 | −0.77 | 1 | 0.988 | 0.987 | 0.983 | 0.983 | 0.967 |
| BDOT10k | 0.61 | 0.17 | 0.69 | −0.69 | 1 | 0.996 | 0.978 | 0.982 | 0.984 | |
| OSM | 0.62 | 0.18 | 0.70 | −0.72 | 1 | 0.978 | 0.983 | 0.981 | ||
| VML1 | 0.63 | 0.17 | 0.71 | −0.85 | 1 | 0.974 | 0.960 | |||
| CLC | 0.62 | 0.18 | 0.71 | −0.79 | 1 | 0.970 | ||||
| BDOO | 0.61 | 0.18 | 0.70 | −0.69 | 1 | |||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pokonieczny, K.; Dawid, W. Comparison and Evaluation the Forest Spatial Data in the Context of Modeling Terrain Passability for Operational Purposes. Forests 2025, 16, 112. https://doi.org/10.3390/f16010112
Pokonieczny K, Dawid W. Comparison and Evaluation the Forest Spatial Data in the Context of Modeling Terrain Passability for Operational Purposes. Forests. 2025; 16(1):112. https://doi.org/10.3390/f16010112
Chicago/Turabian StylePokonieczny, Krzysztof, and Wojciech Dawid. 2025. "Comparison and Evaluation the Forest Spatial Data in the Context of Modeling Terrain Passability for Operational Purposes" Forests 16, no. 1: 112. https://doi.org/10.3390/f16010112
APA StylePokonieczny, K., & Dawid, W. (2025). Comparison and Evaluation the Forest Spatial Data in the Context of Modeling Terrain Passability for Operational Purposes. Forests, 16(1), 112. https://doi.org/10.3390/f16010112