
Visualization of Real-Time Forest Firefighting Inference and Fire Resource Allocation Simulation Technology


Abstract
1. Introduction
- (1)
- A fire resource scheduling model for multiple fire stations was developed. By integrating forest fire spread characteristics with a mixed-integer linear programming (MILP) model, flexible resource scheduling was achieved across various fire scenarios and resource constraints, to minimize response time and firefighting costs.
- (2)
- A dynamic task allocation algorithm within a virtual environment was designed. By enhancing the ant lion optimization algorithm (ALO) and incorporating fire-related weighting, factors such as the density, distance, and wind direction of burning trees, priority firefighting targets were precisely selected, and resource allocation was optimized, thereby improving fire suppression efficiency.
- (3)
- A visual simulation of the forest firefighting response process was realized. Through the simulation of a virtual three-dimensional forest scene, incorporating three-dimensional models of trees, terrain, the environment, and firefighting resources, the movement of firefighting resources, firefighting actions, and water flow effects were accurately simulated, providing a more intuitive and effective method for forest fire suppression.
2. Related Research
2.1. Disaster 3D Visualization
2.2. Fire Resource Scheduling Model
2.3. Dynamic Task Allocation
3. Overview
4. Models and Algorithms
4.1. Firefighting Resource Allocation Model
4.2. Dynamic Allocation of Forest Firefighting Resources Based on the ALO Algorithm
5. Algorithmic Implementation
5.1. Scene Construction
5.2. Dynamic Allocation of Forest Firefighting Resources Based on ALO
5.3. Ant Lion Optimization Algorithm for Searching Optimal
| Algorithm 1 Dynamic allocation algorithm |
| Input: list of firefighters, list of burning trees, firefighter-tree allocation dictionary, list of assigned trees, list of unassigned firefighters
Output: firefighter’s assigned tree 1: For each t in T: 2: Obtain through the ALO algorithm 3: For each f in F: 4: If f is not assigned or is null: 5: Find the tree closest to f, , in 6: If is not null: 7: 8: Add to 9: 10: Firefighter f proceeds to to extinguish the fire 11: End if 12: End if 13: End for 14: Initialize 15: For each in A: 16: If t is fully extinguished: 17: Add f to 18: Remove t from 19: End if 20: End for 21: For each f in : 22: Clear the allocation relationship 23: End for 24: End for |
| Algorithm 2 ALO algorithm searches for the best list of trees |
| Input: list of firefighters, list of external burning trees, size of the optimal tree list
Output: list of optimal trees 25: If : 26: Initialize ants 27: Initialize ant lions 28: For each iteration do: 29: Set the ant lion with the highest fitness as the 30: Update the maximum and minimum values of ant variables 31: For each ant in ants do: 32: Select an ant lion using 33: Calculate new ant position using RandomWalk() based on ’s position and ’s position 34: Calculate the average value as the ant position using Equation (6) 35: Update the ant’s fitness and position using Equation (5) 36: If the ant’s fitness > ant lion’s fitness then: 37: Update the ant lion to the ant 38: End if 39: End for 40: End for 41: Else if : 42: Set to |
6. Results and Discussion
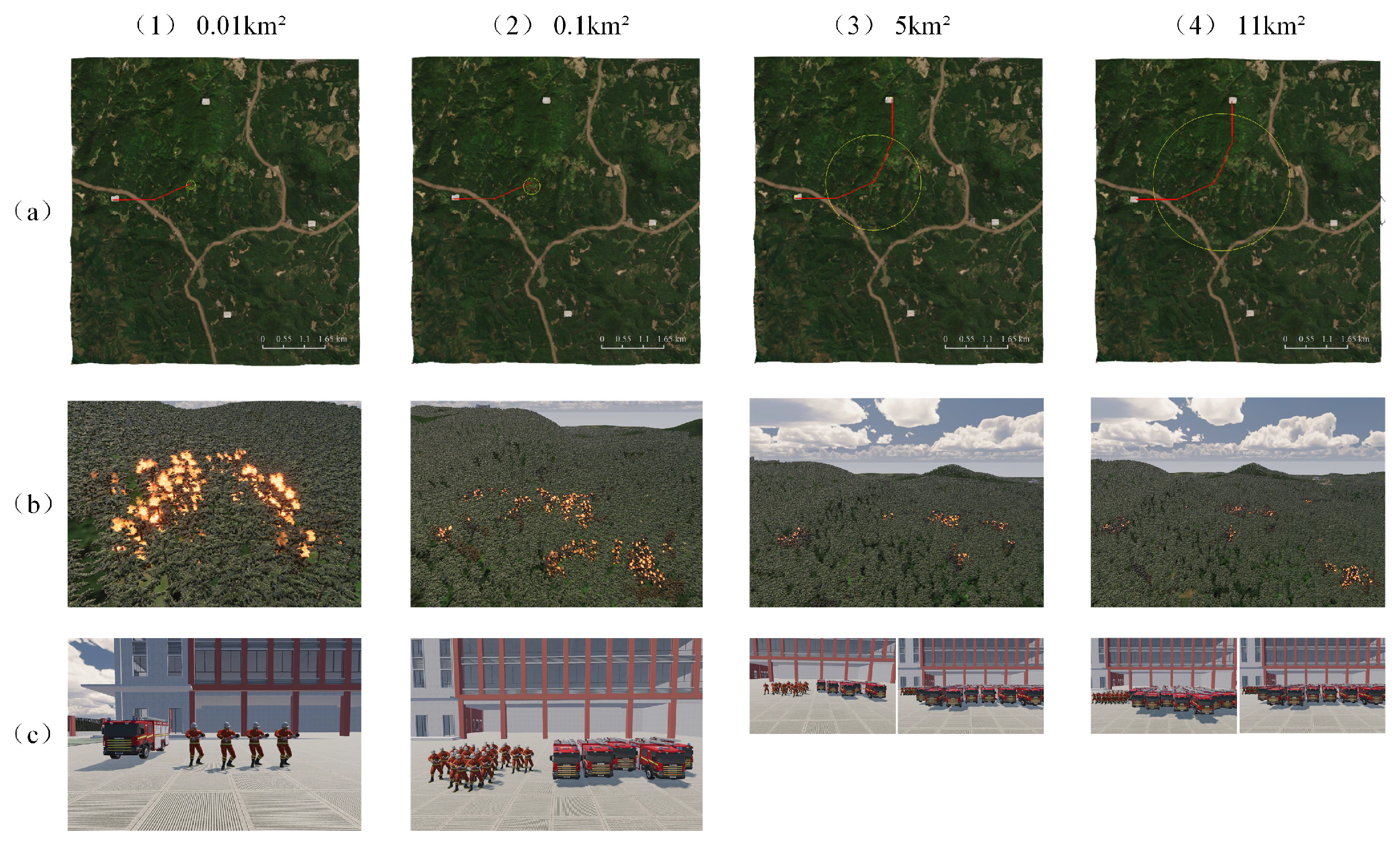
6.1. Firefighting Resource Dispatch and Scheduling Model
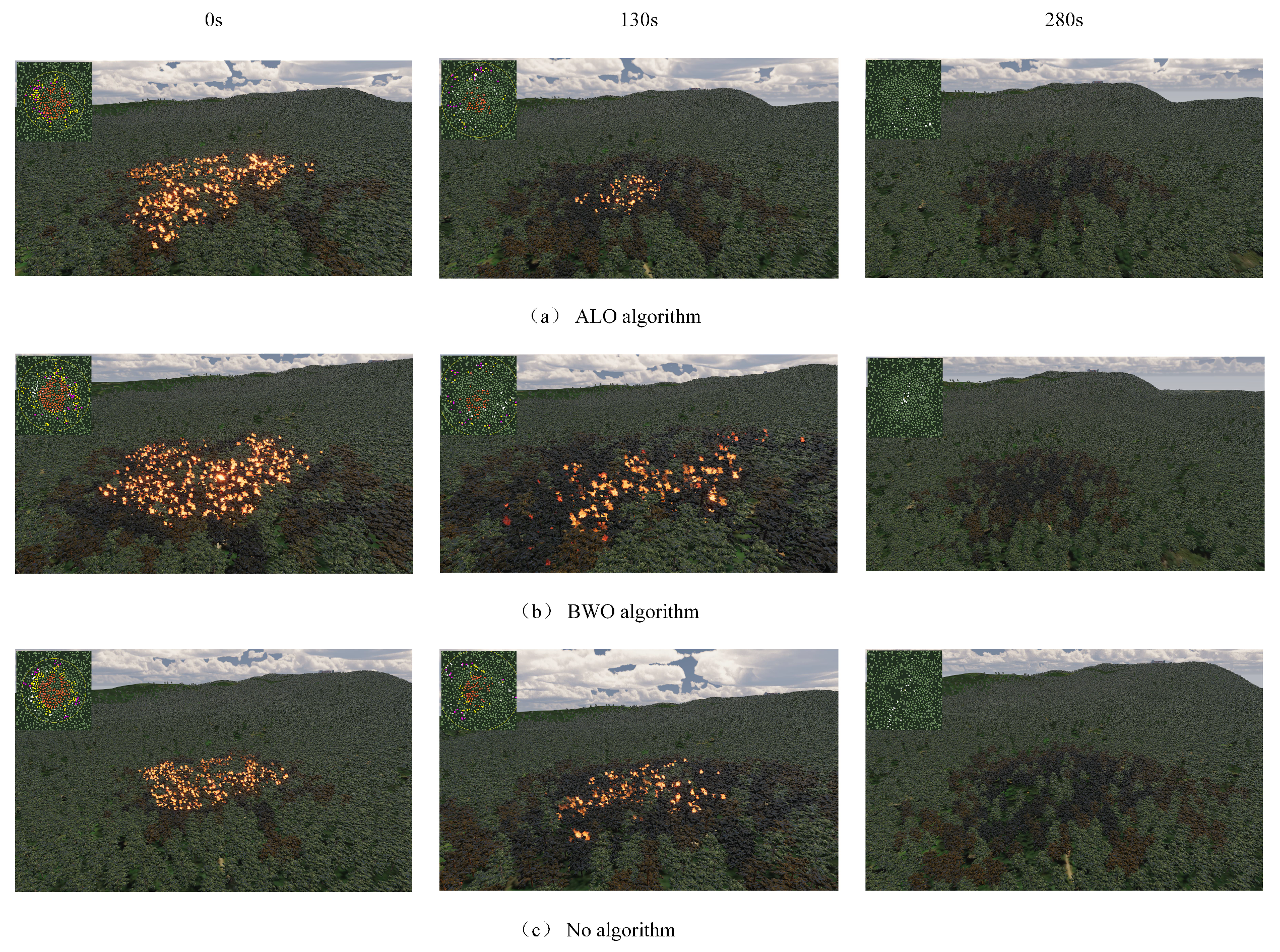
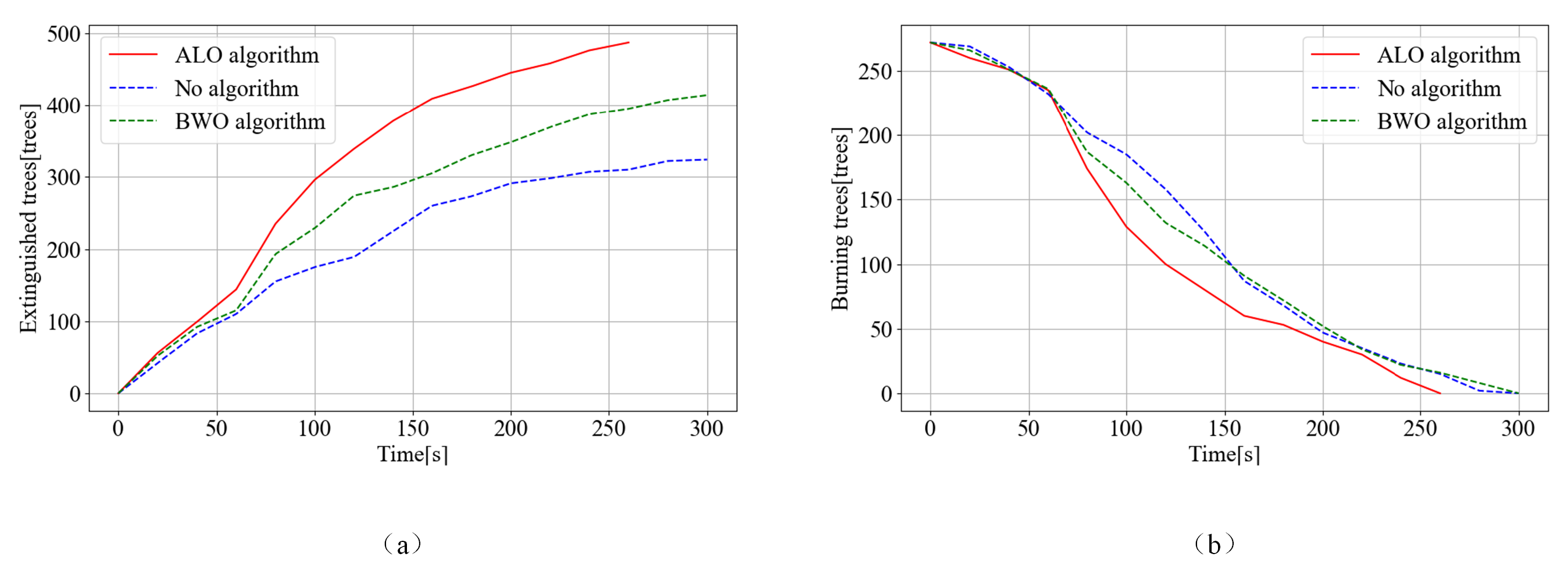
6.2. Dynamic Allocation Algorithm
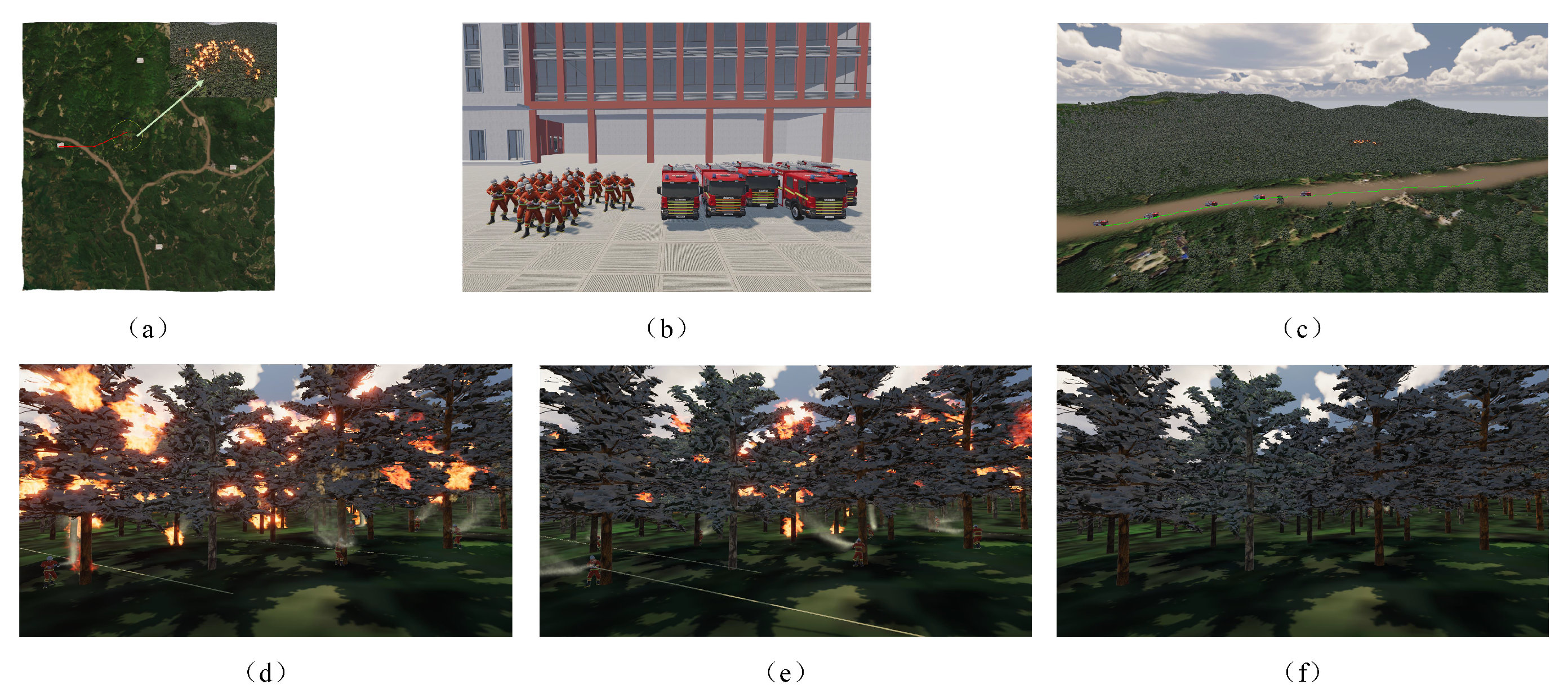
6.3. Three-Dimensional Visualization
7. Limitations and Outlook
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhou, W.; Zhang, C.; Chen, S. Dual deep Q-learning network guiding a multiagent path planning approach for virtual fire emergency scenarios. Appl. Intell. 2023, 53, 21858–21874. [Google Scholar] [CrossRef]
- Lewis, C.; Quijada, R.S.; Harris, F.C. vFireVI: 3D Virtual Interface for vFire. In Proceedings of the 17th International Conference on Information Technology–New Generations (ITNG 2020), Las Vegas, NV, USA, 5–8 April 2020; Springer: Berlin/Heidelberg, Germany, 2020; pp. 309–315. [Google Scholar]
- Li, J.; Li, X.; Chen, C.; Zheng, H.; Liu, N. Three-dimensional dynamic simulation system for forest surface fire spreading prediction. Int. J. Pattern Recognit. Artif. Intell. 2018, 32, 1850026. [Google Scholar] [CrossRef]
- Qiao, C.; Wu, L.; Chen, T.; Huang, Q.; Li, Z. Study on forest fire spreading model based on remote sensing and GIS. In Proceedings of the IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2018; Volume 199, p. 022017. [Google Scholar]
- Cortes, C.A.T.; Thurow, S.; Ong, A.; Sharples, J.J.; Bednarz, T.; Stevens, G.; Del Favero, D. Analysis of wildfire visualization systems for research and training: Are they up for the challenge of the current state of wildfires? IEEE Trans. Vis. Comput. Graph. 2024, 30, 4285–4303. [Google Scholar] [CrossRef]
- Granda, B.; León, J.; Vitoriano, B.; Hearne, J. Decision support models and methodologies for fire suppression. Fire 2023, 6, 37. [Google Scholar] [CrossRef]
- Zhou, J.; Tu, C.; Reniers, G. Simulation analysis of fire truck scheduling strategies for fighting oil fires. J. Loss Prev. Process Ind. 2020, 67, 104205. [Google Scholar] [CrossRef]
- Plucinski, M.P. Contain and control: Wildfire suppression effectiveness at incidents and across landscapes. Curr. For. Rep. 2019, 5, 20–40. [Google Scholar] [CrossRef]
- John, J.; Harikumar, K.; Senthilnath, J.; Sundaram, S. An Efficient Approach With Dynamic Multiswarm of UAVs for Forest Firefighting. IEEE Trans. Syst. Man Cybern. Syst. 2024, 54, 2860–2871. [Google Scholar] [CrossRef]
- Bourhim, E.M.; Cherkaoui, A. Efficacy of virtual reality for studying people’s pre-evacuation behavior under fire. Int. J. Hum.-Comput. Stud. 2020, 142, 102484. [Google Scholar] [CrossRef]
- Steenbeek, J.; Felinto, D.; Pan, M.; Buszowski, J.; Christensen, V. Using gaming technology to explore and visualize management impacts on marine ecosystems. Front. Mar. Sci. 2021, 8, 619541. [Google Scholar] [CrossRef]
- Dincelli, E.; Yayla, A. Immersive virtual reality in the age of the Metaverse: A hybrid-narrative review based on the technology affordance perspective. J. Strateg. Inf. Syst. 2022, 31, 101717. [Google Scholar] [CrossRef]
- Li, W.; Chen, Q. Seismic damage evaluation of an entire underground subway system in dense urban areas by 3D FE simulation. Tunn. Undergr. Space Technol. 2020, 99, 103351. [Google Scholar] [CrossRef]
- Lin, M.L.; Lin, C.H.; Li, C.H.; Liu, C.Y.; Hung, C.H. 3D modeling of the ground deformation along the fault rupture and its impact on engineering structures: Insights from the 1999 Chi-Chi earthquake, Shigang District, Taiwan. Eng. Geol. 2021, 281, 105993. [Google Scholar] [CrossRef]
- Fujimi, T.; Fujimura, K. Testing public interventions for flash flood evacuation through environmental and social cues: The merit of virtual reality experiments. Int. J. Disaster Risk Reduct. 2020, 50, 101690. [Google Scholar] [CrossRef]
- Alene, G.H.; Vicari, H.; Irshad, S.; Perkis, A.; Bruland, O.; Thakur, V. Realistic visualization of debris flow type landslides through virtual reality. Landslides 2023, 20, 13–23. [Google Scholar] [CrossRef]
- Fusco, G.; Zhu, J. Enhancing hurricane risk perception and mitigation behavior through customized virtual reality. Adv. Eng. Inform. 2023, 58, 102212. [Google Scholar] [CrossRef]
- Dhalmahapatra, K.; Das, S.; Maiti, J. On accident causation models, safety training and virtual reality. Int. J. Occup. Saf. Ergon. 2022, 28, 28–44. [Google Scholar] [CrossRef] [PubMed]
- Lian, H.; Liu, K.; Cao, R.; Fei, Z.; Wen, X.; Chen, L. Integration of 3D Gaussian Splatting and Neural Radiance Fields in Virtual Reality Fire Fighting. Remote Sens. 2024, 16, 2448. [Google Scholar] [CrossRef]
- Tao, R.; Ren, H.; Zhou, Y. A ship firefighting training simulator with physics-based smoke. J. Mar. Sci. Eng. 2022, 10, 1140. [Google Scholar] [CrossRef]
- Calandra, D.; De Lorenzis, F.; Cannavò, A.; Lamberti, F. Immersive virtual reality and passive haptic interfaces to improve procedural learning in a formal training course for first responders. Virtual Real. 2023, 27, 985–1012. [Google Scholar] [CrossRef]
- Clifford, R.M.; Jung, S.; Hoermann, S.; Billinghurst, M.; Lindeman, R.W. Creating a stressful decision making environment for aerial firefighter training in virtual reality. In Proceedings of the 2019 IEEE Conference on Virtual Reality and 3d User Interfaces (VR), Osaka, Japan, 23–27 March 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 181–189. [Google Scholar]
- Zhou, S.; Erdogan, A. A spatial optimization model for resource allocation for wildfire suppression and resident evacuation. Comput. Ind. Eng. 2019, 138, 106101. [Google Scholar] [CrossRef]
- Roldán-Gómez, J.J.; González-Gironda, E.; Barrientos, A. A survey on robotic technologies for forest firefighting: Applying drone swarms to improve firefighters’ efficiency and safety. Appl. Sci. 2021, 11, 363. [Google Scholar] [CrossRef]
- Wang, L.; Zhao, X.; Wu, P. Resource-constrained emergency scheduling for forest fires via artificial bee colony and variable neighborhood search combined algorithm. IEEE Trans. Intell. Transp. Syst. 2024, 25, 5791–5806. [Google Scholar] [CrossRef]
- Rodríguez-Veiga, J.; Ginzo-Villamayor, M.J.; Casas-Méndez, B. An integer linear programming model to select and temporally allocate resources for fighting forest fires. Forests 2018, 9, 583. [Google Scholar] [CrossRef]
- Tian, G.; Fathollahi-Fard, A.M.; Ren, Y.; Li, Z.; Jiang, X. Multi-objective scheduling of priority-based rescue vehicles to extinguish forest fires using a multi-objective discrete gravitational search algorithm. Inf. Sci. 2022, 608, 578–596. [Google Scholar] [CrossRef]
- Pan, W.; Huang, Y.; Yin, Z.; Qin, L. Optimal Collaborative Scheduling of Multi-Aircraft Types for Forest Fires General Aviation Rescue. Aerospace 2023, 10, 741. [Google Scholar] [CrossRef]
- Shahparvari, S.; Bodaghi, B.; Roozbeh, I.; Mohammadi, M.; Soleimani, H.; Chhetri, P. A cooperative (or coordinated) multi-agency response to enhance the effectiveness of aerial bushfire suppression operations. Int. J. Disaster Risk Reduct. 2021, 61, 102352. [Google Scholar] [CrossRef]
- Dhall, A.; Dhasade, A.; Nalwade, A.; VK, M.R.; Kulkarni, V. A survey on systematic approaches in managing forest fires. Appl. Geogr. 2020, 121, 102266. [Google Scholar] [CrossRef]
- Hu, H.; He, J.; He, X.; Yang, W.; Nie, J.; Ran, B. Emergency material scheduling optimization model and algorithms: A review. J. Traffic Transp. Eng. 2019, 6, 441–454. [Google Scholar] [CrossRef]
- Wang, L.; Wu, P.; Chu, F. A multi-objective emergency scheduling model for forest fires with priority areas. In Proceedings of the 2020 IEEE International Conference on Industrial Engineering and Engineering Management (IEEM), Singapore, 14–17 December 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 610–614. [Google Scholar]
- Ozkan, O. Optimization of the distance-constrained multi-based multi-UAV routing problem with simulated annealing and local search-based matheuristic to detect forest fires: The case of Turkey. Appl. Soft Comput. 2021, 113, 108015. [Google Scholar] [CrossRef]
- Li, X.; Chen, N.; Ma, H.; Nie, F.; Wang, X. A Parallel Genetic Algorithm With Variable Neighborhood Search for the Vehicle Routing Problem in Forest Fire-Fighting. IEEE Trans. Intell. Transp. Syst. 2024, 25, 14359–14375. [Google Scholar] [CrossRef]
- Skorin-Kapov, N.; Mesarić, L.; García, F.P.; Skorin-Kapov, L. Scheduling aerial resource operations for the extinction of large-scale wildfires. Omega 2024, 122, 102941. [Google Scholar] [CrossRef]
- Zhang, F.; Mei, Y.; Nguyen, S.; Zhang, M.; Tan, K.C. Surrogate-assisted evolutionary multitask genetic programming for dynamic flexible job shop scheduling. IEEE Trans. Evol. Comput. 2021, 25, 651–665. [Google Scholar] [CrossRef]
- Schuetz, H.J.; Kolisch, R. Approximate dynamic programming for capacity allocation in the service industry. Eur. J. Oper. Res. 2012, 218, 239–250. [Google Scholar] [CrossRef]
- Lujak, M.; Giordani, S.; Omicini, A.; Ossowski, S. Decentralizing coordination in open vehicle fleets for scalable and dynamic task allocation. Complexity 2020, 2020, 1047369. [Google Scholar] [CrossRef]
- Wang, B.; Sun, Y.; Liu, D.; Nguyen, H.M.; Duong, T.Q. Social-aware UAV-assisted mobile crowd sensing in stochastic and dynamic environments for disaster relief networks. IEEE Trans. Veh. Technol. 2019, 69, 1070–1074. [Google Scholar] [CrossRef]
- Chakraa, H.; Guérin, F.; Leclercq, E.; Lefebvre, D. Optimization techniques for Multi-Robot Task Allocation problems: Review on the state-of-the-art. Robot. Auton. Syst. 2023, 168, 104492. [Google Scholar] [CrossRef]
- Zhu, C.; Tao, J.; Pastor, G.; Xiao, Y.; Ji, Y.; Zhou, Q.; Li, Y.; Ylä-Jääski, A. Folo: Latency and quality optimized task allocation in vehicular fog computing. IEEE Internet Things J. 2018, 6, 4150–4161. [Google Scholar] [CrossRef]
- Duan, X.; Liu, H.; Tang, H.; Cai, Q.; Zhang, F.; Han, X. A novel hybrid auction algorithm for multi-UAVs dynamic task assignment. IEEE Access 2019, 8, 86207–86222. [Google Scholar] [CrossRef]
- Zhao, X.; Zong, Q.; Tian, B.; Zhang, B.; You, M. Fast task allocation for heterogeneous unmanned aerial vehicles through reinforcement learning. Aerosp. Sci. Technol. 2019, 92, 588–594. [Google Scholar] [CrossRef]
- Qie, H.; Shi, D.; Shen, T.; Xu, X.; Li, Y.; Wang, L. Joint optimization of multi-UAV target assignment and path planning based on multi-agent reinforcement learning. IEEE Access 2019, 7, 146264–146272. [Google Scholar] [CrossRef]
- Shahidi, A.; Ramezanian, R.; Shahparvari, S. A greedy heuristic algorithm to solve a VRP-based model for planning and coordinating multiple resources in emergency response to bushfires. Sci. Iran. 2022. [Google Scholar] [CrossRef]
- Gao, S.; Wu, J.; Ai, J. Multi-UAV reconnaissance task allocation for heterogeneous targets using grouping ant colony optimization algorithm. Soft Comput. 2021, 25, 7155–7167. [Google Scholar] [CrossRef]
- Geng, N.; Chen, Z.; Nguyen, Q.A.; Gong, D. Particle swarm optimization algorithm for the optimization of rescue task allocation with uncertain time constraints. Complex Intell. Syst. 2021, 7, 873–890. [Google Scholar] [CrossRef]
- Fontes, D.B.; Homayouni, S.M.; Gonçalves, J.F. A hybrid particle swarm optimization and simulated annealing algorithm for the job shop scheduling problem with transport resources. Eur. J. Oper. Res. 2023, 306, 1140–1157. [Google Scholar] [CrossRef]
- Liu, X.; Jing, T.; Hou, L. An FW–GA Hybrid Algorithm Combined with Clustering for UAV Forest Fire Reconnaissance Task Assignment. Mathematics 2023, 11, 2400. [Google Scholar] [CrossRef]
- Huo, L.; Zhu, J.; Wu, G.; Li, Z. A novel simulated annealing based strategy for balanced UAV task assignment and path planning. Sensors 2020, 20, 4769. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Liang, Z.; Liu, H.; Wang, R.; Liu, Y. Ensemble framework by using nature inspired algorithms for the early-stage forest fire rescue—A case study of dynamic optimization problems. Eng. Appl. Artif. Intell. 2020, 90, 103517. [Google Scholar] [CrossRef]
- Mirjalili, S. The ant lion optimizer. Adv. Eng. Softw. 2015, 83, 80–98. [Google Scholar] [CrossRef]
- Ali, E.; Abd Elazim, S.; Abdelaziz, A. Optimal allocation and sizing of renewable distributed generation using ant lion optimization algorithm. Electr. Eng. 2018, 100, 99–109. [Google Scholar] [CrossRef]
- Yao, Y.; Li, Y.; Xie, D.; Hu, S.; Wang, C.; Li, Y. Coverage enhancement strategy for WSNs based on virtual force-directed ant lion optimization algorithm. IEEE Sensors J. 2021, 21, 19611–19622. [Google Scholar] [CrossRef]
- Kavitha, J.; Thirupathi Rao, K. Dynamic resource allocation in cloud infrastructure using ant lion-based auto-regression model. Int. J. Commun. Syst. 2022, 35, e5071. [Google Scholar] [CrossRef]
- Wu, Z.; Wang, B.; Li, M.; Tian, Y.; Quan, Y.; Liu, J. Simulation of forest fire spread based on artificial intelligence. Ecol. Indic. 2022, 136, 108653. [Google Scholar] [CrossRef]
- Kargapolova, E.; Kuleshov, V.; Scuba, P.Y. Assessment of the Use of Robotic Equipment for Extinguishing Fires at Oil Refining Enterprises. In Proceedings of the IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2021; Volume 720, p. 012086. [Google Scholar]
- Zhu, L.; Lo, K. Eco-socialism and the political ecology of forest conservation in the Greater Khingan Range, China. Political Geogr. 2022, 93, 102533. [Google Scholar] [CrossRef]
- Yang, Z.; Guo, L.; Dong, X. Study on Optimal Dispatch of Emergency Resources for Forest Fire in Daxing’anling. J. Dalian Univ. Technol. 2014, 54, 644–650. [Google Scholar]
- Halassy, G.; Restás, Á. Economic aspects of disaster management focusing on firefighting equipment. Ecoterra J. Environ. Res. Prot. 2017, 14, 44–52. [Google Scholar]
- NFPA. 1710 Standard for the Organization and Deployment of Fire Suppression Operations, Emergency Medical Operations, and Special Operations to the Public by Career Fire Departments. Available online: https://www.nfpa.org/codes-and-standards/nfpa-1710-standard-development/1710 (accessed on 25 November 2024).
- Elhalid, O.B.; Isık, A.H. Enhancing medical officer scheduling in healthcare organizations: A comprehensive investigation of genetic and google or tools algorithms for multi-project resource-constrained optimization. Int. J. Print. Technol. Digit. Ind. 2024, 8, 92–103. [Google Scholar] [CrossRef]
- Liu, F. Forest Fire Prevention; China Statistics Press: Beijing, China, 2018. [Google Scholar]
- Akay, A.E.; Erdoğan, A.; Taş, İ. Assessment of firefighting teams by using GIS-based network analysis method. Turk. J. For. Sci. 2020, 4, 424–435. [Google Scholar] [CrossRef]
- Pausas, J.G.; Keeley, J.E. Wildfires and global change. Front. Ecol. Environ. 2021, 19, 387–395. [Google Scholar] [CrossRef]
- Zhong, C.; Li, G.; Meng, Z. Beluga whale optimization: A novel nature-inspired metaheuristic algorithm. Knowl.-Based Syst. 2022, 251, 109215. [Google Scholar] [CrossRef]
- Lawande, S.R.; Jasmine, G.; Anbarasi, J.; Izhar, L.I. A systematic review and analysis of intelligence-based pathfinding algorithms in the field of video games. Appl. Sci. 2022, 12, 5499. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Indicator | |
|---|---|
| i | The i-th fire station |
| j | The j-th time period |
| Set | |
| t | Firefighting time period settings |
| N | Set of fire stations |
| Parameters | |
| Unit transportation cost of fire trucks | |
| Fire truck extinguishing cost | |
| Firefighter extinguishing cost | |
| Growth rate of burning materials in time period j | |
| Firefighter extinguishing speed | |
| k | Ratio of fire truck extinguishing speed to firefighter extinguishing speed |
| Number of firefighters at the i-th fire station | |
| Number of fire trucks at the i-th fire station | |
| p | Fire truck capacity |
| Decision Variables | |
| Number of fire trucks dispatched from the i-th fire station | |
| Number of firefighters dispatched from the i-th fire station |
| Fire Station | Fire Trucks | Firefighters |
|---|---|---|
| Station 1 | 80 | 400 |
| Station 2 | 180 | 1100 |
| Station 3 | 150 | 700 |
| Station 4 | 160 | 800 |
| Fire Intensity Level | Affected Area (km2) | Number of Casualties |
|---|---|---|
| General Forest Fire | ≤0.01 | 1–10 |
| Large Forest Fire | 0.01–1 | 10–50 |
| Major Forest Fire | 1–10 | 50–100 |
| Particularly Major Forest Fire | ≥10 | ≥100 |
| Fire Severity Level | Fire Area (km2) | Fire Stations | Fire Trucks | Fire Fighters |
|---|---|---|---|---|
| General Forest Fire | 0.01 | 1 | 1 | 4 |
| Moderate Forest Fire | 0.5 | 1 | 10 | 49 |
| Major Forest Fire | 5 | 2 | 85 | 422 |
| Severe Forest Fire | 11 | 2 | 152 | 760 |
| Fire Severity Level | Fire Area (km2) | Fire Stations | Fire Trucks | Fire Fighters |
|---|---|---|---|---|
| General Forest Fire | 0.01 | 1 | 4 | 16 |
| Moderate Forest Fire | 0.5 | 1 | 52 | 254 |
| Major Forest Fire | 5 | 3 | 326 | 1629 |
| Severe Forest Fire | 11 | 4 | 500 | 2497 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, S.; Huai, Y.; Nie, X.; Meng, Q.; Zhang, R. Visualization of Real-Time Forest Firefighting Inference and Fire Resource Allocation Simulation Technology. Forests 2024, 15, 2114. https://doi.org/10.3390/f15122114
Yang S, Huai Y, Nie X, Meng Q, Zhang R. Visualization of Real-Time Forest Firefighting Inference and Fire Resource Allocation Simulation Technology. Forests. 2024; 15(12):2114. https://doi.org/10.3390/f15122114
Chicago/Turabian StyleYang, Siyu, Yongjian Huai, Xiaoying Nie, Qingkuo Meng, and Rui Zhang. 2024. "Visualization of Real-Time Forest Firefighting Inference and Fire Resource Allocation Simulation Technology" Forests 15, no. 12: 2114. https://doi.org/10.3390/f15122114
APA StyleYang, S., Huai, Y., Nie, X., Meng, Q., & Zhang, R. (2024). Visualization of Real-Time Forest Firefighting Inference and Fire Resource Allocation Simulation Technology. Forests, 15(12), 2114. https://doi.org/10.3390/f15122114