3.2. TLS Data from Mexico and Other Regions
The algorithms were applied to all datasets to estimate the average diameters of each point cloud representing a tree. It should be noted that, from this point forward, the country will be referred to in general terms; however, the data refer to specific ecosystems within these countries, which may exhibit diversity in their vegetation and do not represent the country as a whole. This information about the ecosystem can be found in
Table 1.
Before proceeding with the diameter estimations, it is important to note the execution times for each method under varying point cloud sizes. For a 2D dataset with 159 points, the execution times in seconds for each method were as follows: Nelder–Mead (0.00020039 s), least squares (0.00003875 s), convex hull (0.00006209 s), RANSAC (0.08686157 s), and Hough transform (8.60164225 s). In contrast, for a larger 2D dataset with 8,502 points, the execution times were as follows: Nelder–Mead (0.00367971 s), least squares (0.00022823 s), convex hull (0.00010988 s), RANSAC (5.76394385 s), and Hough transform (149.01826135 s). These results indicate that algebraic fitting methods, such as Nelder–Mead and least squares, require significantly less processing time, while the Hough transform is considerably more resource-intensive.
A dot plot with error bars is a graphical tool that displays the mean value of a dataset along with its variability. In this case, the points represent the mean DBH estimated by each method across different regions, while the error bars indicate the standard deviation, reflecting the spread of values around the mean. This type of plot allows for a comparison of the precision and consistency of the estimation methods by visualizing both their central values and the variability in the measurements.
In this analysis (
Figure 5), the estimation methods are compared with in situ measurements (tree caliper) across various regions. Nelder–Mead and least squares show more consistent performance in most regions, with narrower error bars indicating lower variability and higher accuracy in environments with more regular geometries. However, in regions such as Peru and Guyana, where forest structures are more complex, a wider dispersion in results is observed, suggesting an impact of environmental characteristics on the estimates.
In contrast, RANSAC and the Hough transform exhibit more variable behavior. RANSAC, which is robust to outliers, shows greater dispersion in regions like Indonesia and Mexico, with several extreme values. The Hough transform also shows higher variability in areas with complex geometries, such as Peru and Guyana, reflecting a more heterogeneous performance. Nevertheless, in regions such as Austria and Switzerland, both methods yield more stable estimates.
Finally, the convex hull method tends to overestimate diameters in most regions, with longer error bars and greater dispersion in values. This is more pronounced in Austria and Peru, where the topographical and structural characteristics of the forest are more irregular, appearing to affect the method’s accuracy. In these regions, the convex hull method exhibits greater variability compared to the other methods.
Descriptive statistics for the estimated diameters are provided in
Table A1 of
Appendix B, which includes a detailed summary of these values.
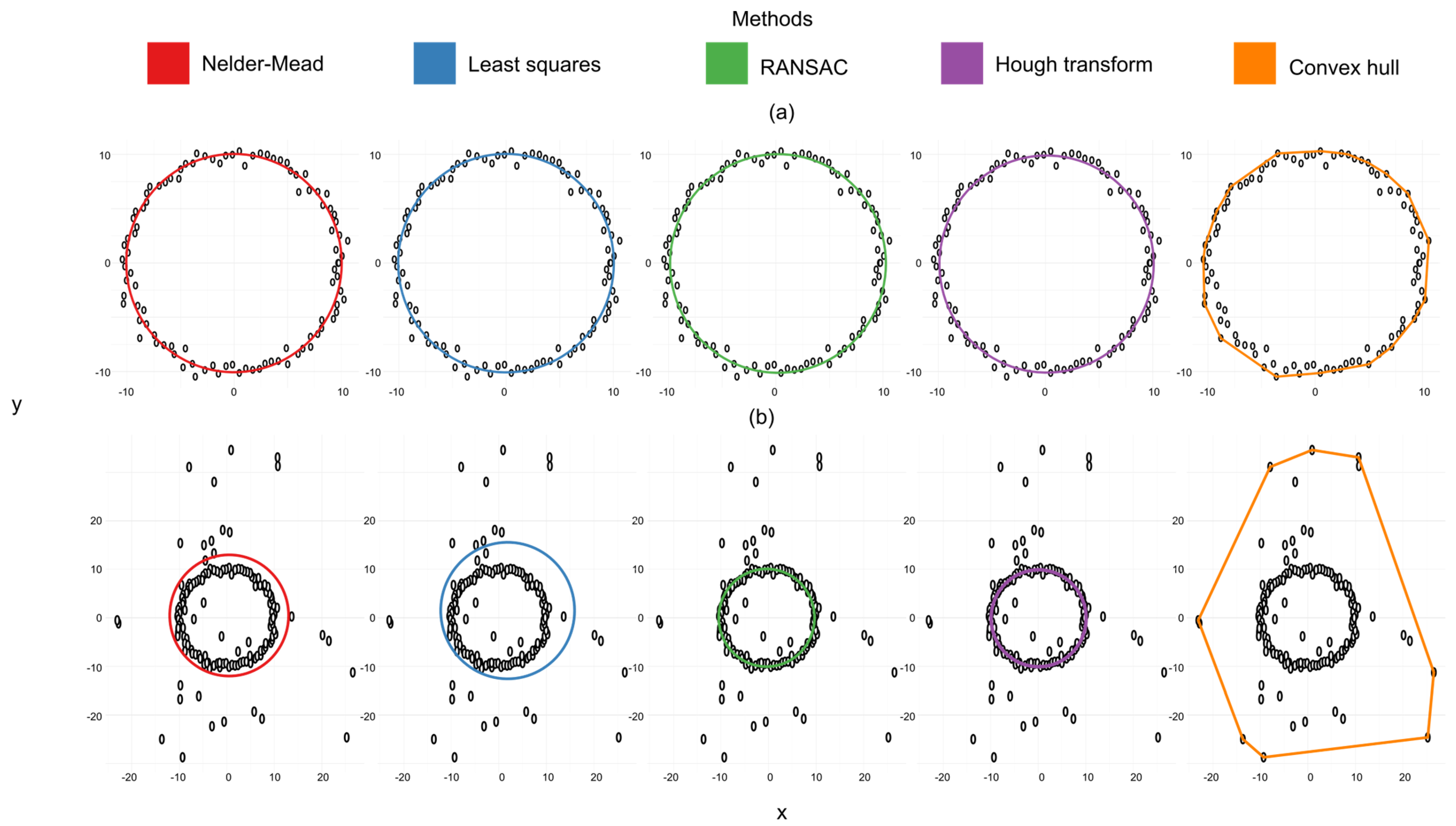
The response of the different algorithms to stem circumference estimation varies significantly, reflecting their distinct approaches to handling geometric data. In the graphical representation (
Figure 6), Nelder–Mead and least squares closely follow the shape of the stem, providing consistent diameter estimates without significant deviation from the geometric center. Hough transform behaves similarly but tends to slightly underestimate in certain areas. In contrast, convex hull consistently overestimates the diameter, especially in the lower left part of the graph, indicating it may be less suited for capturing precise tree contours.
As for RANSAC, it produces a smaller circumference, primarily fitting areas with higher point density, such as the left and right sides of the graph. Unlike the other methods that tend to capture the whole stem, RANSAC prioritizes denser zones and omits more distant points, leading to underestimations of the diameter in various sections. Together, these algorithms offer different approaches to fitting the circumference, with methods like Nelder–Mead and least squares being more accurate, while others like convex hull and RANSAC show greater variability in their estimates. Additional examples of circumferences and the respective responses of the algorithms can be found in
Appendix C, in
Figure A3 and
Figure A4.
Table 5 presents the coefficient of determination values for the six regions, obtained using five fitting methods. In general, the methods show a good fit with R
2 values close to 1.0.
The Nelder–Mead method exhibits the highest value for Mexico (0.982), followed by Switzerland (0.873) and Austria (0.823). Least squares achieve coefficients close to 1.0 in Mexico (0.982) and Switzerland (0.886), while the convex hull method has the lowest value for Austria (0.552), highlighting a poor fitting capability in this region.
The bubble chart in
Figure 7 provides a clear visualization of the different R² values among the methods in each country. In this chart, the size of each bubble is proportional to the R² value, meaning that larger bubbles indicate a higher R² and therefore a better fit. This design allows for a direct comparison of fit values both between algorithms and across regions. For example, an excellent fit is observed in Mexico and Switzerland, where larger bubbles are seen, while lower accuracy is indicated by smaller bubbles in countries like Guyana and Austria. The scatter plot images can be found in
Appendix D,
Figure A5 and
Figure A6.
RMSE and mean absolute relative error are common error analysis metrics used to evaluate the accuracy and consistency of different measurement or fitting methods in studies such as tree diameter estimation.
RMSE measures the average deviation between observed values and estimates in absolute terms. This calculation is based on squaring the differences of each pair of values, which penalizes larger errors and captures overall variability more effectively. A low RMSE indicates that the method produces estimates close to the observed values on average, suggesting high reliability and low error variability. Conversely, a high RMSE reflects greater dispersion in errors, implying that the estimates deviate significantly from the actual values.
On the other hand, MAPE calculates the average error in relative terms, expressing each error as a percentage of the observed value. This allows the method’s accuracy to be evaluated in relation to the size of the observed values, making it especially useful for studies with varying magnitudes. As a percentage metric, MAPE facilitates the comparison of model or method performance across different scales or units of measurement, enabling consistent assessment regardless of the data scale.
Thus, a method with low RMSE and MAPE values is generally considered superior, as it reflects both low error variability and high relative accuracy. This combination makes the method more adaptable to different contexts and provides reliable and comparable estimates in scientific studies.
RMSE and MAPE values for the six datasets are summarized in
Table 6, based on five fitting methods.
For Austria, the Nelder–Mead and RANSAC methods yielded the lowest RMSE values, at 4.66 cm and 4 cm, respectively. In contrast, the convex hull method exhibited a significantly poorer performance, with an RMSE of 31.67 cm. Regarding MAPE, the lowest percentages were achieved by the Nelder–Mead (7.28%) and Hough transform (7.84%) methods, while convex hull reached a notably high 78.2%, marking the worst outcome for this region.
In Guyana, Nelder–Mead and least squares emerged as the most precise methods, with RMSE values of 9.11 cm and 10.02 cm, respectively. Conversely, the convex hull method again showed the highest error, with an RMSE of 16.89 cm. MAPE results followed a similar trend, where Nelder–Mead and least squares recorded the lowest percentages at 5.63% and 6.02%, while convex hull registered the highest at 16.3%.
Indonesia demonstrated a broader variation among methods. Nelder–Mead and least squares maintained relatively low RMSEs, at 22.98 cm and 21.64 cm, respectively, whereas RANSAC underperformed significantly, with an RMSE of 58.26 cm. This pattern was consistent in the MAPE results, where RANSAC reached 35.81%, in contrast to the more moderate values of 15.04% for Nelder–Mead and 14.87% for least squares.
Mexico exhibited the lowest errors overall. The Nelder–Mead method stood out as the most accurate, with an RMSE of 1.59 cm and a MAPE of 6.12%. Although the convex hull method displayed a slightly higher RMSE (2.81 cm), it remained relatively low compared to the other countries.
In Peru, results showed considerable variability. The Nelder–Mead, least squares, and Hough transform methods achieved RMSE values close to 50 cm. However, RANSAC performed notably poorly, with an RMSE of 162.86 cm and an exceptionally high MAPE of 108.72%. Convex hull also showed suboptimal performance, with an RMSE of 67.89 cm and a MAPE of 54.07%.
For Switzerland, the performance of the Nelder–Mead, least squares, RANSAC, and Hough transform methods was more balanced, with RMSE values around 6 cm. Nevertheless, convex hull again displayed the worst performance, with an RMSE of 13.45 cm and a MAPE of 17.34%. In contrast, least squares recorded the best relative performance, with a MAPE of 4.48%.
The heat maps of RMSE and MAPE (
Figure 8 and
Figure 9) illustrate the differences between methods and regions. In these maps, green indicates low error, while red represents very high error. The convex hull method consistently produced the highest errors, both in absolute and relative terms, while the Nelder–Mead, least squares, and Hough transform methods provided more stable and reliable results, particularly in countries such as Mexico and Switzerland, where errors remained minimal.
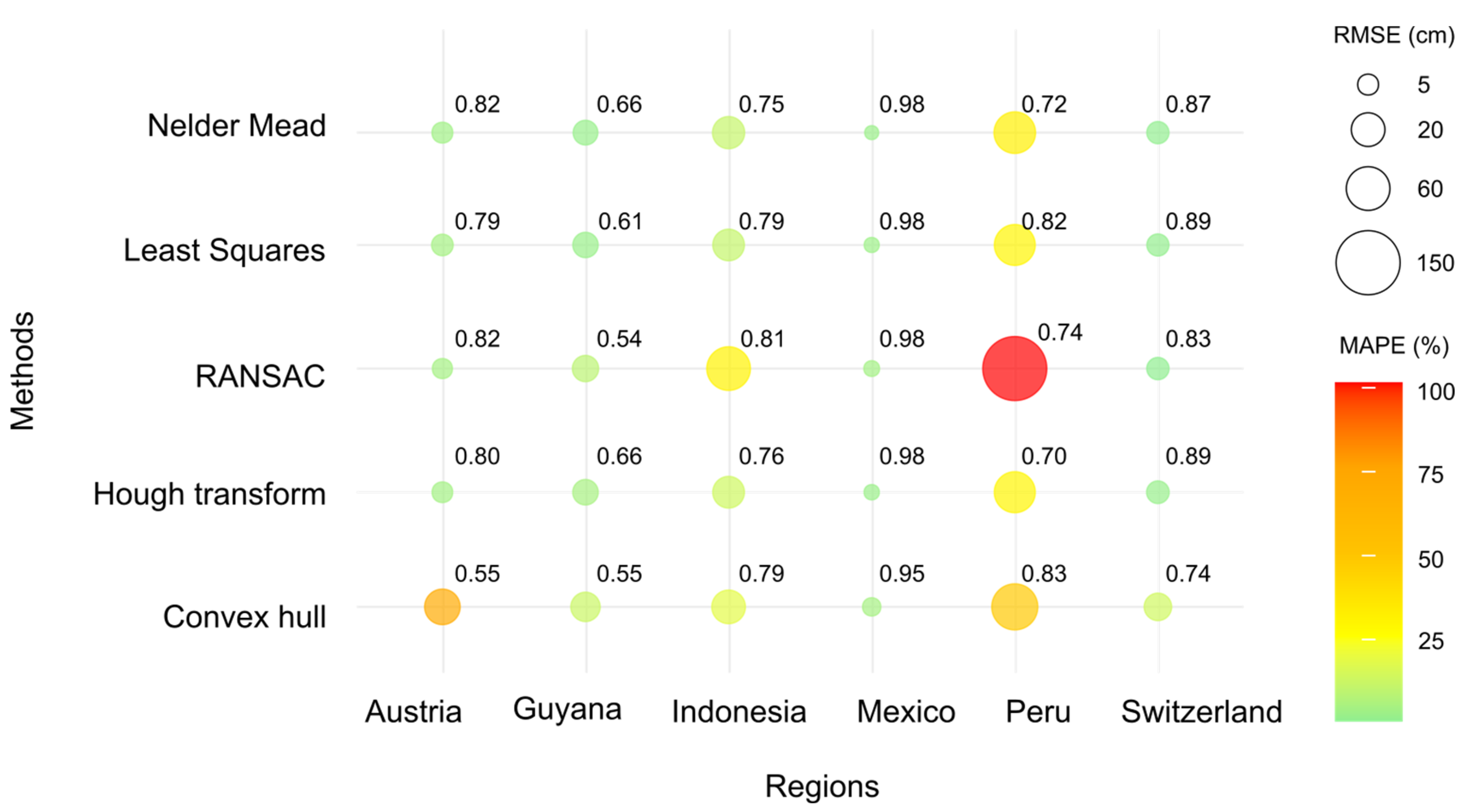
Figure 10 is a combination of a bubble chart and a heat map that summarizes all the information related to RMSE, MAPE, and R². In this chart, RMSE is represented by the size of the bubbles, MAPE defines the color gradient, and R² is shown as the subscript within each bubble. This design enables direct comparison between methods and regions. The ideal values are represented by small green circles with R² values close to 1, as seen in the case of Mexico.
Finally, the results of the bootstrapping are included in
Appendix E,
Table A2 and
Table A3. For each metric (DBH, R², RMSE, and MAPE), the bootstrap method was applied, generating a distribution of 1,000 samples with replacement, which allowed for the construction of 95% confidence intervals. These intervals provide a measure of the stability and variability of the results under conditions similar to those observed in the field. For example, the confidence interval for RMSE in the RANSAC method (Mexico) ranged between 1.48 and 2.08; this range could be expected with 95% confidence in a large-scale study in a forest with similar environmental characteristics. In this way, the confidence intervals strengthen the comparability between methods and provide an estimate of the inherent uncertainty in the data.
Nelder–Mead, in Austria, shows narrow intervals for the mean DBH (37.37–41.65 cm) and RMSE (3.06–5.99 cm), with R² values between 0.73 and 0.9. Convex hull, however, exhibits the widest ranges, with RMSE values between 28.23 and 35.71 cm and R² spanning from 0.43 to 0.69. The Hough transform method shows moderate RMSE intervals (3.15–6.00 cm), with R² ranging between 0.69 and 0.89.
In Guyana, Nelder–Mead and least squares maintain RMSE values between 1.31 cm (lower bound) and 17.21 cm (upper bound), though the R² range is broader. RANSAC and convex hull display wider RMSE intervals, reaching up to 27.02 cm. The Hough transform reports an RMSE between 2.84 and 15.89 cm, with R² values ranging from 0.35 to 0.96.
For Indonesia, Nelder–Mead and least squares exhibit moderate intervals, though the R² ranges are relatively broad. RANSAC and convex hull show greater dispersion, particularly in RMSE, with RANSAC reaching values as high as 92.75 cm. The Hough transform method demonstrates RMSE values between 6.14 and 35.75 cm, with R² ranging from 0.55 to 0.95.
Regarding Mexico, the methods present narrow intervals for both the mean DBH and RMSE, with R² values close to 1. Nelder–Mead reports an RMSE between 1.16 and 2.02 cm, while convex hull’s RMSE ranges from 1.75 to 4.01 cm. The Hough transform displays RMSE values between 1.28 and 2.13 cm.
The results for Peru reflect greater overall dispersion. RANSAC exhibits the highest RMSE, with intervals spanning from 67.4 to 239.9 cm, while convex hull also displays high variability. Nelder–Mead and least squares show considerable variation in both R² and RMSE. The Hough transform registers RMSE values between 19.15 and 75.64 cm, with R² values ranging from 0.43 to 0.99.
Ultimately, in Switzerland, Nelder–Mead and least squares stand out with narrow intervals for both the mean DBH and RMSE. RANSAC maintains a relatively low RMSE, while convex hull shows an RMSE range between 9.52 and 16.95 cm. The Hough transform method presents an RMSE between 2.52 and 7.96 cm, with R² values ranging from 0.79 to 0.97.


 ,
, 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}