
Aerial Identification of Amazonian Palms in High-Density Forest Using Deep Learning




Abstract
:1. Introduction
2. Materials and Methods
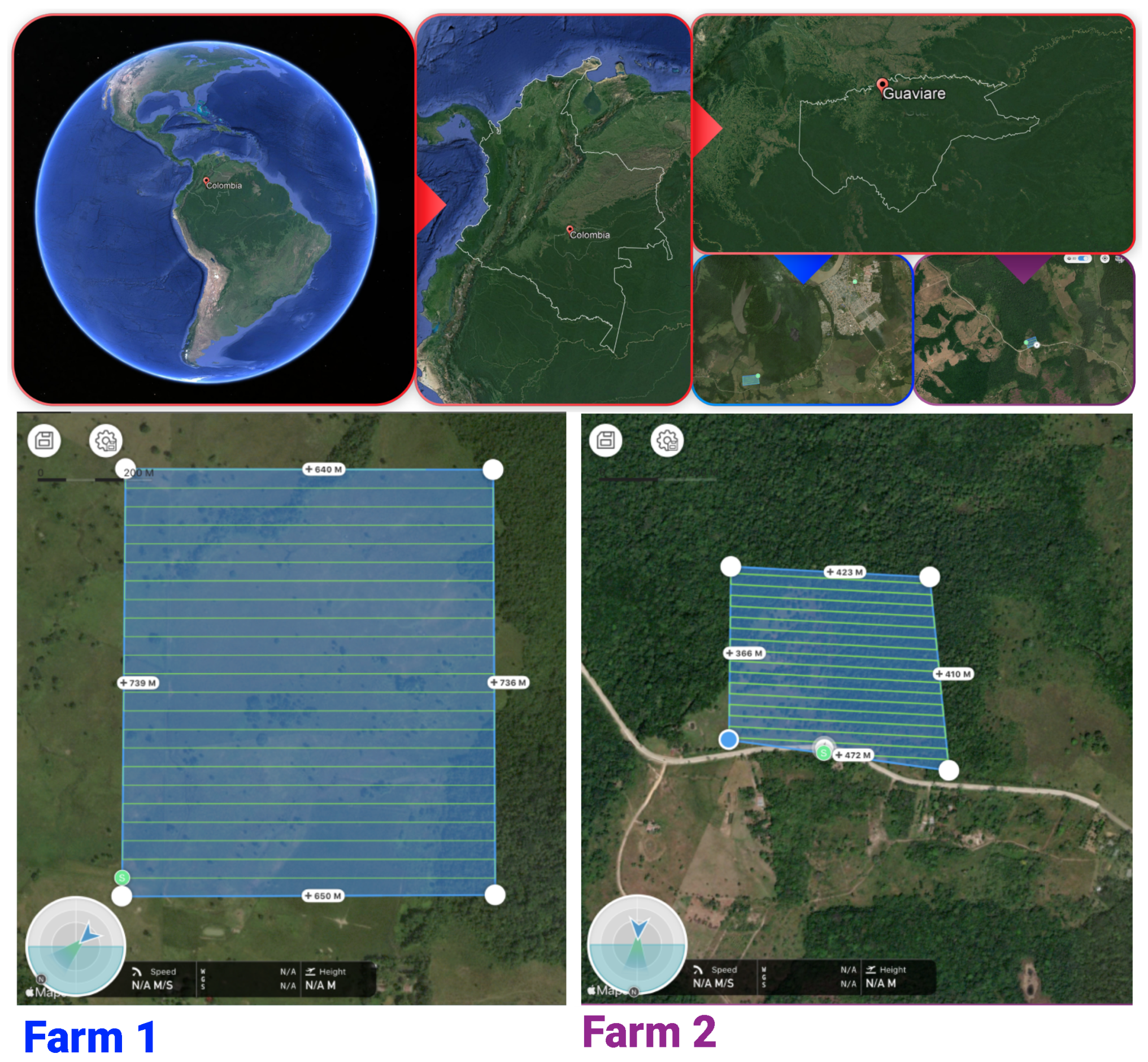
2.1. Experimental Protocol
2.2. Hyperparameters and Input Data
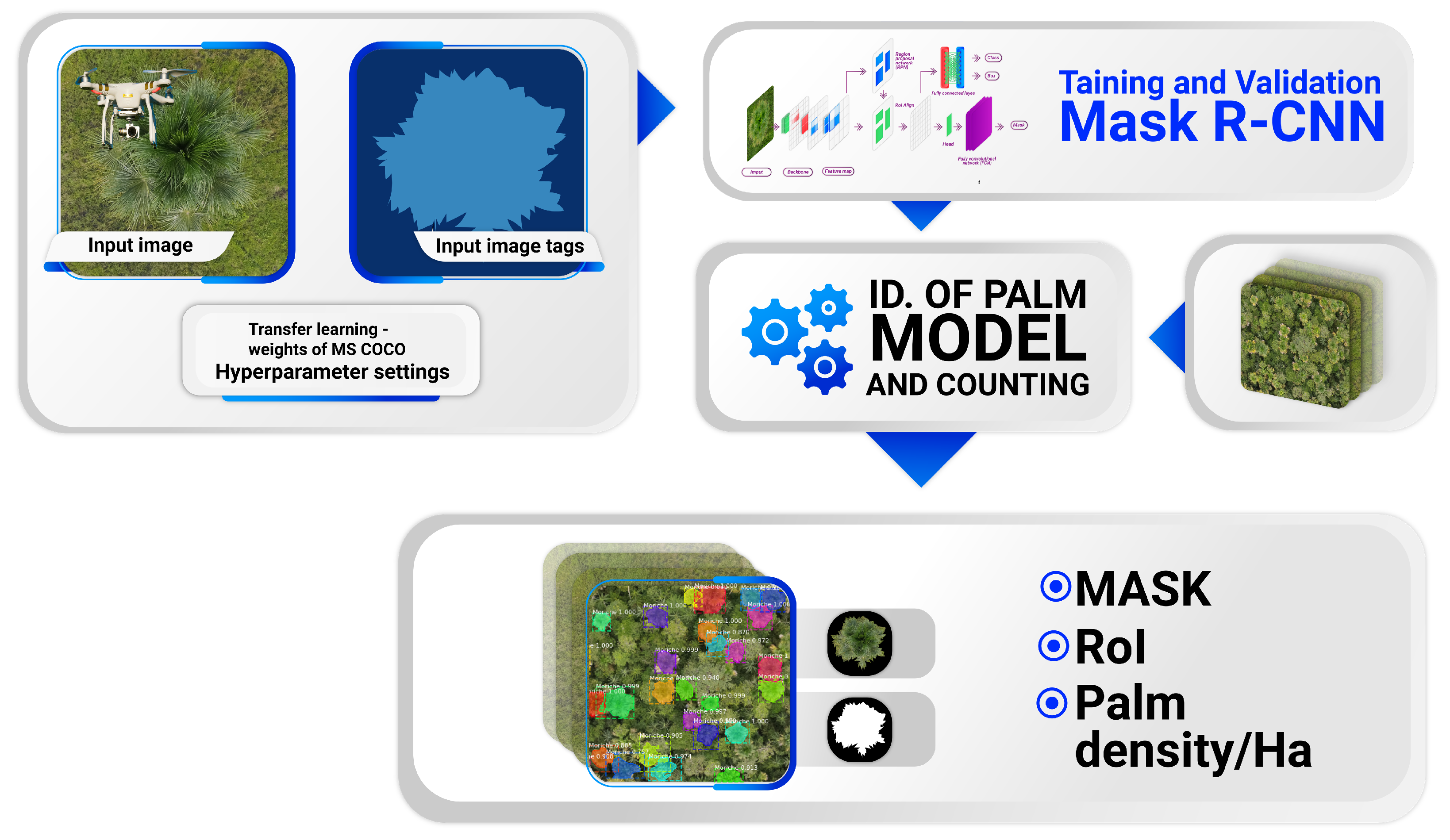
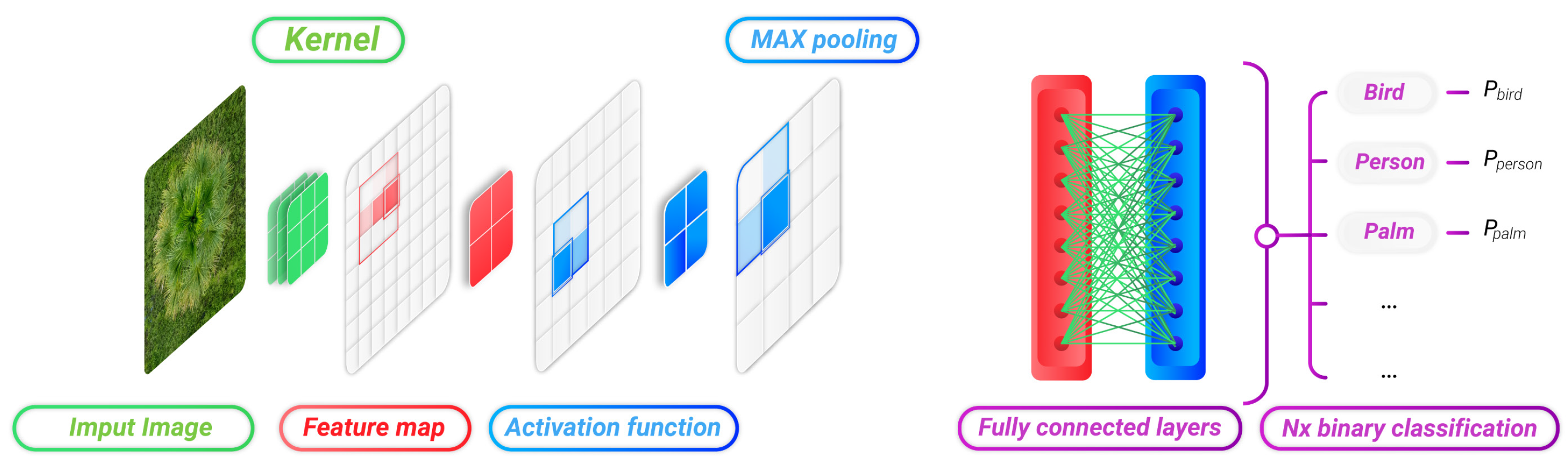
2.3. Palm Segmentation and Identification
2.4. Performance Metrics
3. Results
4. Conclusions and Discussion
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kahn, F. Palms as key swamp forest resources in Amazonia. For. Ecol. Manag. 1991, 38, 133–142. [Google Scholar] [CrossRef]
- Navarro-Cruz, A.R.; Lazcano-Hernández, M.; Vera-López, O.; Kammar-García, A.; Segura-Badilla, O.; Aguilar-Alonso, P.; Pérez-Fernández, M.S. Mauritia flexuosa L. f. In Fruits of the Brazilian Cerrado; Springer: Cham, Switzerland, 2021; pp. 79–98. [Google Scholar] [CrossRef]
- Galeano, A.; Urrego, L.E.; Sánchez, M.; Peñuela, M.C. Environmental drivers for regeneration of Mauritia flexuosa L.f. in Colombian Amazonian swamp forest. Aquat. Bot. 2015, 123, 47–53. [Google Scholar] [CrossRef]
- Mendes, F.N.; de Melo Valente, R.; Rêgo, M.M.C.; Esposito, M.C. The floral biology and reproductive system of Mauritia flexuosa (Arecaceae) in a restinga environment in northeastern Brazil. Brittonia 2017, 69, 11–25. [Google Scholar] [CrossRef]
- Furley, P.A. Tropical Forests of the Lowlands. In The Physical Geography of South America; Oxford University Press: Oxford, UK, 2007. [Google Scholar] [CrossRef]
- Moreira, S.N.; Eisenlohr, P.V.; Pott, A.; Pott, V.J.; Oliveira-Filho, A.T. Similar vegetation structure in protected and non-protected wetlands in Central Brazil: Conservation significance. Environ. Conserv. 2014, 42, 356–362. [Google Scholar] [CrossRef]
- Maciel, E.A.; Martins, F.R. Rarity patterns and the conservation status of tree species in South American savannas. Flora Morphol. Distrib. Funct. Ecol. Plants 2021, 285, 151942. [Google Scholar] [CrossRef]
- Hernández, M.S. Seje, Moriche, Asaí: Palmas Amazónicas con Potencial, 1st ed.; Instituto Amazónico de Investigaciones Científicas SINCHI-Equilátero Diseño Impreso: Bogotá, Colombia, 2018; p. 123. [Google Scholar]
- Quintero-Angel, M.; Martínez-Girón, J.; Orjuela-Salazar, S. Agroindustrial valorization of the pulp and peel, seed, flour, and oil of moriche (Mauritia flexuosa) from the Bita River, Colombia: A potential source of essential fatty acids. Biomass Convers. Biorefin. 2022, 1, 1–9. [Google Scholar] [CrossRef]
- van der Hoek, Y.; Solas, S.Á.; Peñuela, M.C. The palm Mauritia flexuosa, a keystone plant resource on multiple fronts. Biodivers. Conserv. 2019, 28, 539–551. [Google Scholar] [CrossRef]
- Cárdenas López, D.; Arias G., J.C. Manual de Identificación, Selección y Evaluación de Oferta de Productos Forestales no Maderables; Instituto Amazónico de Investigaciones Científicas “SINCHI”: Bogotá, Colombia, 2007. [Google Scholar]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar] [CrossRef] [Green Version]
- Girshick, R. Fast R-CNN. In Proceedings of the IEEE International Conference on Computer Vision, Washington, DC, USA, 7–13 December 2015; pp. 1440–1448. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [Green Version]
- He, K.; Gkioxari, G.; Dollar, P.; Girshick, R. Mask R-CNN. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar] [CrossRef]
- Coelho Eugenio, F.; Badin, T.L.; Fernandes, P.; Mallmann, C.L.; Schons, C.; Schuh, M.S.; Soares Pereira, R.; Fantinel, R.A.; Pereira da Silva, S.D. Remotely Piloted Aircraft Systems (RPAS) and machine learning: A review in the context of forest science. Int. J. Remote Sens. 2021, 42, 8207–8235. [Google Scholar] [CrossRef]
- Orozco, Ó.A.; Llano Ramírez, G. Sistemas de Información enfocados en tecnologías de agricultura de precisión y aplicables a la caña de azúcar, una revisión. Rev. Ing. Univ. MedellíN 2016, 15, 103–124. [Google Scholar] [CrossRef]
- Ponce-Corona, E.; Guadalupe Sánchez, M.; Fajardo-Delgado, D.; Acevedo-Juárez, B.; De-La-Torre, M.; Avila-George, H.; Castro, W. A systematic review of the literature focused on the use of unmanned aerial vehicles during the vegetation detection process. RISTI Rev. Iber. Sist. Tecnol. Inf. 2020, 2020, 82–101. [Google Scholar] [CrossRef]
- Urbahs, A.; Jonaite, I. Features of the use of unmanned aerial vehicles for agriculture applications. Aviation 2013, 17, 170–175. [Google Scholar] [CrossRef]
- Naranjo-Torres, J.; Mora, M.; Hernández-García, R.; Barrientos, R.J.; Fredes, C.; Valenzuela, A. A review of convolutional neural network applied to fruit image processing. Appl. Sci. 2020, 10, 3443. [Google Scholar] [CrossRef]
- Fromm, M.; Schubert, M.; Castilla, G.; Linke, J.; McDermid, G. Automated detection of conifer seedlings in drone imagery using convolutional neural networks. Remote Sens. 2019, 11, 2585. [Google Scholar] [CrossRef] [Green Version]
- Rzanny, M.; Seeland, M.; Wäldchen, J.; Mäder, P. Acquiring and preprocessing leaf images for automated plant identification: Understanding the tradeoff between effort and information gain. Plant Methods 2017, 13, 97. [Google Scholar] [CrossRef] [Green Version]
- Kerkech, M.; Hafiane, A.; Canals, R. Deep leaning approach with colorimetric spaces and vegetation indices for vine diseases detection in UAV images. Comput. Electron. Agric. 2018, 155, 237–243. [Google Scholar] [CrossRef]
- Pereira, C.S.; Morais, R.; Reis, M.J. Deep learning techniques for grape plant species identification in natural images. Sensors 2019, 19, 4850. [Google Scholar] [CrossRef] [Green Version]
- Barré, P.; Stöver, B.C.; Müller, K.F.; Steinhage, V. LeafNet: A computer vision system for automatic plant species identification. Ecol. Inform. 2017, 40, 50–56. [Google Scholar] [CrossRef]
- Altaheri, H.; Alsulaiman, M.; Muhammad, G.; Amin, S.U.; Bencherif, M.; Mekhtiche, M. Date fruit dataset for intelligent harvesting. Data Brief 2019, 26, 104514. [Google Scholar] [CrossRef]
- Jia, W.; Tian, Y.; Luo, R.; Zhang, Z.; Lian, J.; Zheng, Y. Detection and segmentation of overlapped fruits based on optimized mask R-CNN application in apple harvesting robot. Comput. Electron. Agric. 2020, 172, 105380. [Google Scholar] [CrossRef]
- Osco, L.P.; de Arruda, M.d.S.; Marcato Junior, J.; da Silva, N.B.; Ramos, A.P.M.; Moryia, É.A.S.; Imai, N.N.; Pereira, D.R.; Creste, J.E.; Matsubara, E.T.; et al. A convolutional neural network approach for counting and geolocating citrus-trees in UAV multispectral imagery. ISPRS J. Photogramm. Remote Sens. 2020, 160, 97–106. [Google Scholar] [CrossRef]
- Ganesh, P.; Volle, K.; Burks, T.F.; Mehta, S.S. Deep Orange: Mask R-CNN based Orange Detection and Segmentation. IFAC-PapersOnLine 2019, 52, 70–75. [Google Scholar] [CrossRef]
- Sa, I.; Ge, Z.; Dayoub, F.; Upcroft, B.; Perez, T.; McCool, C. DeepFruits: A Fruit Detection System Using Deep Neural Networks. Sensors 2016, 16, 1222. [Google Scholar] [CrossRef] [Green Version]
- Tu, S.; Xue, Y.; Zheng, C.; Qi, Y.; Wan, H.; Mao, L. Detection of passion fruits and maturity classification using Red-Green-Blue Depth images. Biosyst. Eng. 2018, 175, 156–167. [Google Scholar] [CrossRef]
- Lyu, S.; Noguchi, N.; Ospina, R.; Kishima, Y. Development of phenotyping system using low altitude UAV imagery and deep learning. Int. J. Agric. Biol. Eng. 2021, 14, 207–215. [Google Scholar] [CrossRef]
- Neupane, B.; Horanont, T.; Hung, N.D. Deep learning based banana plant detection and counting using high-resolution red-green-blue (RGB) images collected from unmanned aerial vehicle (UAV). PLoS ONE 2019, 14, e0223906. [Google Scholar] [CrossRef]
- Santos, T.T.; de Souza, L.L.; dos Santos, A.A.; Avila, S. Grape detection, segmentation, and tracking using deep neural networks and three-dimensional association. Comput. Electron. Agric. 2020, 170, 105247. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Wu, J.; Fu, L.; Majeed, Y.; Feng, Y.; Li, R.; Cui, Y. Improved Kiwifruit Detection Using Pre-Trained VGG16 with RGB and NIR Information Fusion. IEEE Access 2020, 8, 2327–2336. [Google Scholar] [CrossRef]
- Ge, Y.; Xiong, Y.; From, P.J. Instance Segmentation and Localization of Strawberries in Farm Conditions for Automatic Fruit Harvesting. IFAC-PapersOnLine 2019, 52, 294–299. [Google Scholar] [CrossRef]
- Liu, X.; Hu, C.; Li, P. Automatic segmentation of overlapped poplar seedling leaves combining Mask R-CNN and DBSCAN. Comput. Electron. Agric. 2020, 178, 105753. [Google Scholar] [CrossRef]
- Morales, G.; Kemper, G.; Sevillano, G.; Arteaga, D.; Ortega, I.; Telles, J. Automatic Segmentation of Mauritia flexuosa in Unmanned Aerial Vehicle (UAV) Imagery Using Deep Learning. Forests 2018, 9, 736. [Google Scholar] [CrossRef] [Green Version]
- Casapia, X.T.; Falen, L.; Bartholomeus, H.; Cárdenas, R.; Flores, G.; Herold, M.; Coronado, E.N.H.; Baker, T.R. Identifying and Quantifying the Abundance of Economically Important Palms in Tropical Moist Forest Using UAV Imagery. Remote Sens. 2019, 12, 9. [Google Scholar] [CrossRef] [Green Version]
- Dutta, A.; Zisserman, A. The VIA Annotation Software for Images, Audio and Video. In Proceedings of the 27th ACM International Conference on Multimedia (MM ’19), Nice, France, 21–25 October 2019; ACM: New York, NY, USA, 2019. 4p. [Google Scholar] [CrossRef] [Green Version]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar] [CrossRef] [Green Version]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft COCO: Common Objects in Context. In European Conference on Computer Vision; Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Cham, Switzerland, 2014; Volume 8693, pp. 740–755. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
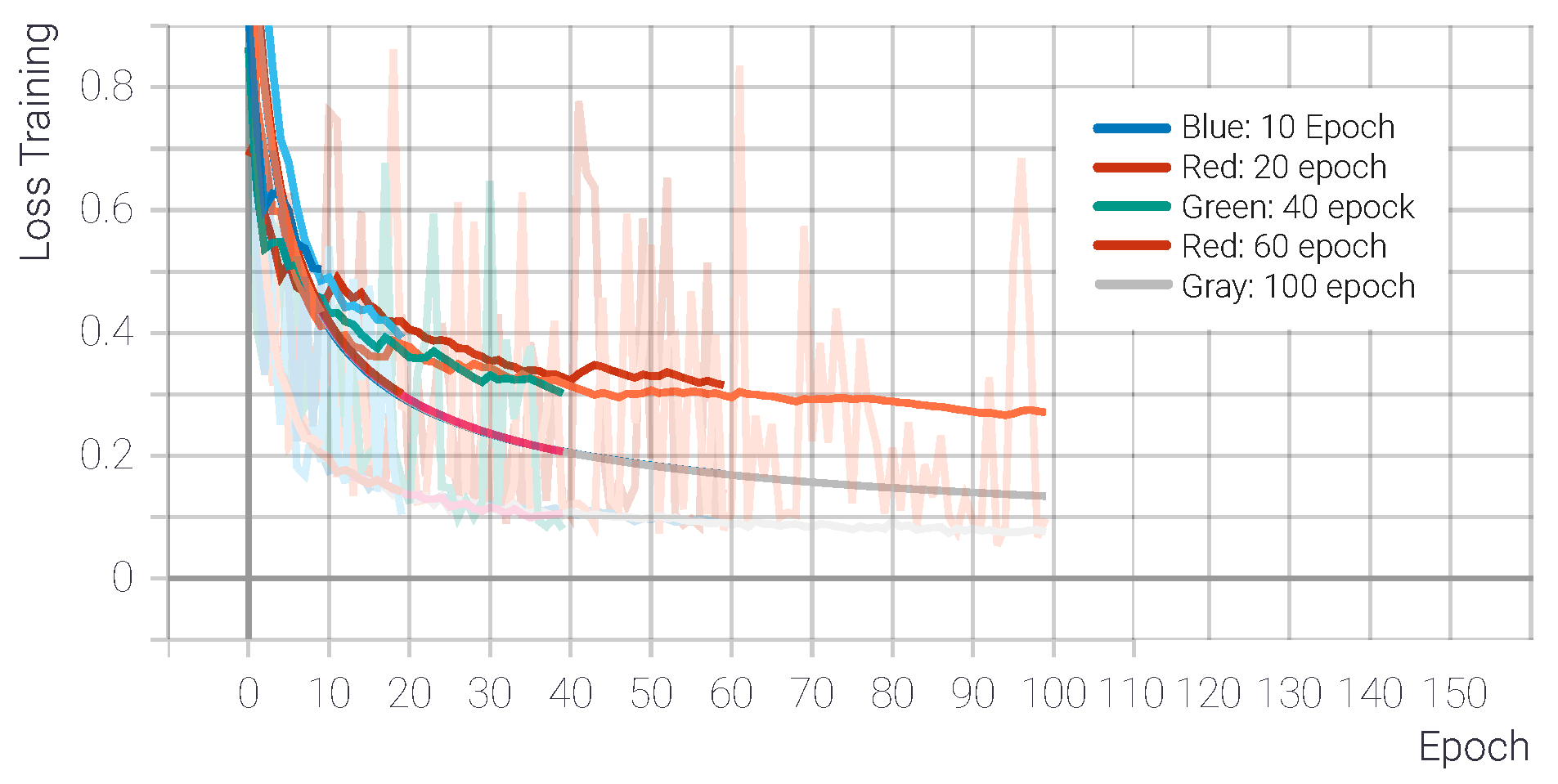
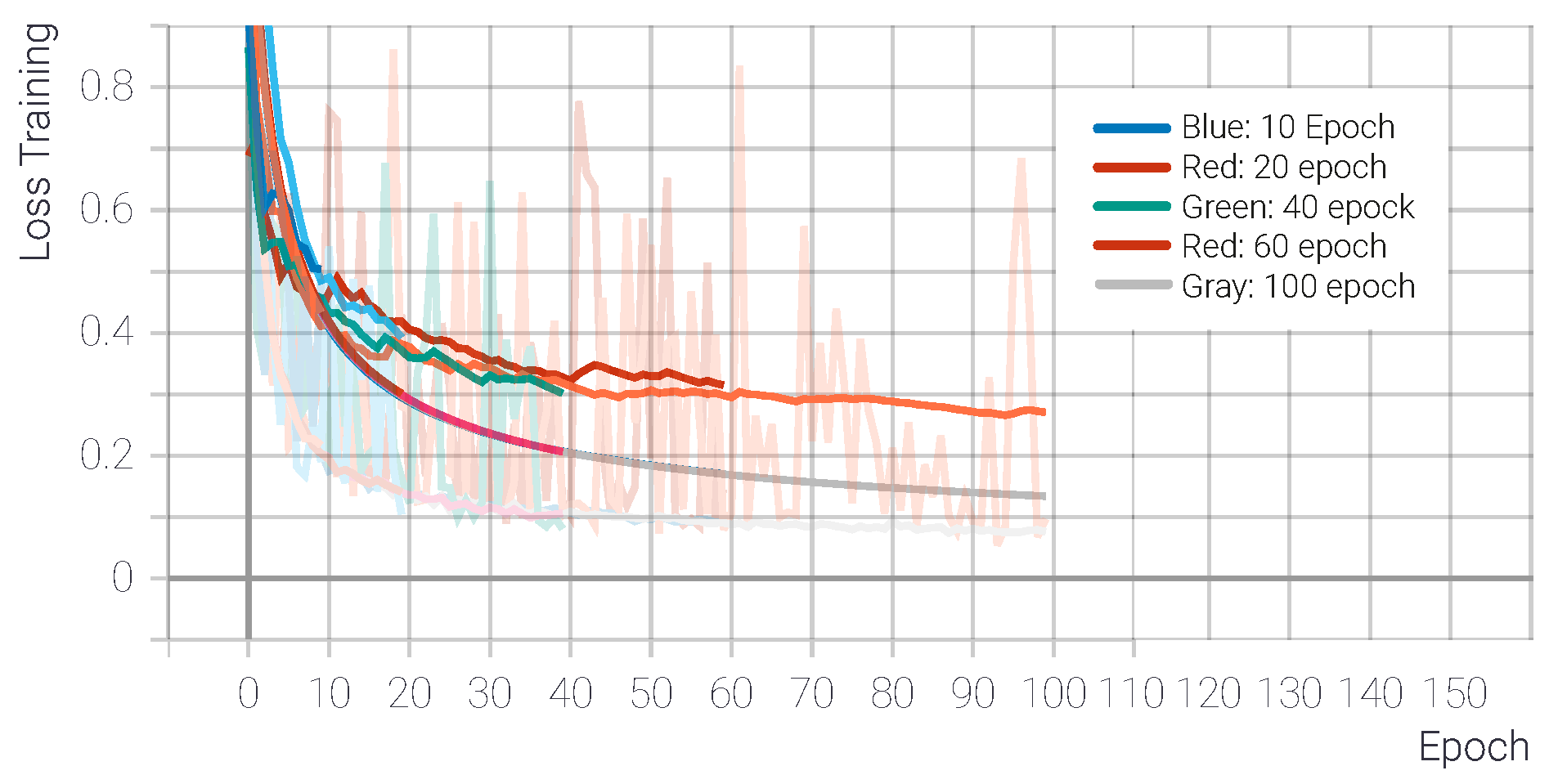
| Epoch | Loss Training | Loss Val |
|---|---|---|
| 10 | 21.75 | 48.69 |
| 20 | 14.11 | 10.5 |
| 40 | 10.65 | 8.13 |
| 60 | 9.09 | 14.54 |
| 100 | 7.64 | 9.69 |
| Confidence 20 | Confidence 60 | Confidence 85 | ||||
|---|---|---|---|---|---|---|
| Epoch | Counting | IoU | Counting | IoU | Counting | IoU |
| 10 | 125 | 81.76 | 124 | 81.91 | 118 | 83.56 |
| 20 | 126 | 84.33 | 125 | 84.94 | 121 | 85.60 |
| 40 | 126 | 85.81 | 124 | 85.63 | 120 | 85.17 |
| 60 | 119 | 87.23 | 118 | 87.38 | 118 | 87.38 |
| 100 | 119 | 88.55 | 119 | 88.55 | 119 | 88.55 |
| Confidence | Precision | Recall | Score | Count Model |
|---|---|---|---|---|
| C-20 | 0.9683 | 1 | 0.9839 | 126 |
| C-60 | 0.9680 | 1 | 0.9837 | 125 |
| C-85 | 0.9917 | 1 | 0.9958 | 121 |
| Set 1 | Precision | Recall | Score |
|---|---|---|---|
| C-20 | 0.8467 | 0.9958 | 0.9152 |
| C-60 | 0.8462 | 0.9665 | 0.9023 |
| C-85 | 0.8750 | 0.9363 | 0.9046 |
| Set 1 | Precision | Recall | Score |
|---|---|---|---|
| C-20 | 0.9437 | 0.8662 | 0.9033 |
| C-60 | 0.9437 | 0.8822 | 0.9119 |
| C-85 | 0.9712 | 0.8172 | 0.8876 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marin, W.; Mondragon, I.F.; Colorado, J.D. Aerial Identification of Amazonian Palms in High-Density Forest Using Deep Learning. Forests 2022, 13, 655. https://doi.org/10.3390/f13050655
Marin W, Mondragon IF, Colorado JD. Aerial Identification of Amazonian Palms in High-Density Forest Using Deep Learning. Forests. 2022; 13(5):655. https://doi.org/10.3390/f13050655
Chicago/Turabian StyleMarin, Willintong, Ivan F. Mondragon, and Julian D. Colorado. 2022. "Aerial Identification of Amazonian Palms in High-Density Forest Using Deep Learning" Forests 13, no. 5: 655. https://doi.org/10.3390/f13050655
APA StyleMarin, W., Mondragon, I. F., & Colorado, J. D. (2022). Aerial Identification of Amazonian Palms in High-Density Forest Using Deep Learning. Forests, 13(5), 655. https://doi.org/10.3390/f13050655