Abstract
In order to deal with the threat of forest fire to the original forest resources, improve the efficiency of firefighting, and better protect the forest ecological resources in the original forest area. In this paper, the ant colony algorithm is used as the search algorithm for the firefighting path, and the Qiqian Forestry Bureau in the northern primitive forest region of the Great Xing‘an Range in Inner Mongolia is taken as the research object to select road entry points with different linear distances from the fire poin. By adjusting the pheromone volatility coefficient, the improved ant colony algorithm can better deal with the off-road firefighting path planning in forest environment. The simulation results show that using the road entry point with linear distance of 24.5 km as the starting point for the path planning of off-road firefighting in the northern the Great Xing‘an Range can effectively shorten the path and minimize the loss caused by forest fire. At the same time, it verifies the effectiveness and rationality of the path planning of the improved ant colony algorithm under such environmental conditions. The optimization scheme meets the needs of forest fire fighting in the original forest area, and can play a guiding role in design of the forest fire path planning in the original forest area in the northern Great Xing‘an Range of Inner Mongolia and a reference for fire path planning in other forest areas in China.
1. Introduction
Forest fire has always been one of the main hazards threatening forestry resources, damaging the ecological environment and causing great losses to economic construction and people’s lives and property [1]. According to the data released by the Disaster Relief and Material Security Department of the Ministry of Emergency Management of China on 12 January 2021, there were 1153 forest fires in 2020. There were 7 great fires, with 8500 hectares of forest area affected. Compared with 2019, the number of forest fires decreased by 1192, down 50.83% year-on-year; victimized forest area decreased by 4979 hectares, down 36.87% year on year [2]. The path planning of forest fire fighting is a key problem in forest fire fighting work. Path optimization is usually carried out in a two-dimensional raster environment, and there is less research on path planning in three-dimensional space. Zhang Shu [3] designed an emergency logistics system for forest fire prevention in Guangzhou based on the ant colony algorithm. The system provides fire-fighting resources as a means to minimize response time and emergency costs, coordinates agencies and personnel, and enables emergency supplies to reach fire points efficiently and accurately.Liu Tiancai [4] for the traditional fire emergency information level is not high enough, fire emergency commanders only rely on experience to implement emergency rescue and relief activities, which leads to low command and dispatch efficiency, poor effectiveness and decision-making deviation.He used the application of three-dimensional GIS technology, tilt photography technology, database technology, etc. to build a three-dimensional GIS fire emergency system.Wang Gang et al. [5] proposed an attractive element concept based on the target point and combined with the gravitational parameters as the algorithm support of robot path planning; through the simulation analysis of robot path selection in the environment of the random obstacle point set, it was verified that the method can satisfy the accurate and efficient optimal path selection of the robot in three-dimensional space. Huang Ling et al. [6] studied the three-dimensional path optimization of a fruit and vegetable picking robot in the mountain environment, and obtained the ant colony algorithm with intelligent groups and widely distributed characteristics by improvement. The effectiveness of the improvement was verified by simulation, so that the fruit and vegetable picking mobile robot can realize the minimization of the path and the number of turns to better meet the practical needs.
The ant colony algorithm was formally proposed by Marco Dorigo in 1992 [7]. In the algorithm, ants are all independent individuals, and they can exchange and collaborate information through pheromones. The ant colony algorithm has strong robustness and adaptability and has achieved good results in solving the problem of three-dimensional space path planning. However, there are shortcomings associated with this algorithm, such as a propensity towards the local optimal solution and slow convergence [8]. In order to better apply the ant colony algorithm in the field of forest fire fighting path planning, a large number of scholars have conducted research on its improvement, including the improvement of the structure of the ant colony algorithm, parameter optimization, and the initial method of pheromones, and updated rules. Bu Shengqiang et al. [9] obtained an adaptive ant colony algorithm by changing the heuristic function and pheromone update function according to the trajectory tracing demand of forest fire robots, and in the simulation test, verified the feasibility and effectiveness of the algorithm, which provided a theoretical basis for the trajectory tracing technology of forest fire robots. Shuchao Tian et al. [10] determined that in order to solve the forest fire logistics support path planning problem, the ant colony algorithm must be improved with the goal of minimum time, and the experimental results show that the improved algorithm can solve the logistics support path planning problem of forest fire. Cheng Juntao [11] applied the video-based fire detection algorithm to a forest fire monitoring mobile robot and integrated the idea of simulated annealing into the ant colony algorithm to plan the patrol path of the forest-fire-monitoring robot. Through experiments in different scenarios, it can be seen that the robot which plans the path according to the improved ant colony algorithm better avoids obstacles, and detects smoke and flames generated by surrounding burning objects during the movement. Cui Jingkui [12] designed the heuristic function and pheromone update rule of the ant colony algorithm, which is used to optimize the inspection path of the forest-fire-detection robot. The simulation results show that the algorithm can find the optimal inspection path that meets the conditions, which provides a basis for the practical application of a forest inspection unmanned aerial vehicle. In this paper, the pheromone volatilization in the model will be adaptively adjusted based on the ant colony algorithm, and the pheromone volatilization coefficient will be reduced by several iterations until it remains within a reasonable range.
The three undeveloped forestry bureaus of Qiqian, Wuma, and Yonganshan (referred to as the Northern Three Bureaus), under the jurisdiction of the Forestry Administration of the Northern Primeval Forest Region of the Great Xing‘an Range, are the largest area of contiguous primeval forest in China. The Northern Three Bureaus are about 120 km wide from east to west and 140km long from north to south, with a total live wood accumulation of 133.2 million m3 and forest coverage rate of 95.6% [13]. Forest fire is also the main threat to this forest resource [14]. In this paper, we study from the perspective of forest fire emergency logistics, take Qiqian Forestry Bureau as the research object, use the improved ant colony algorithm to optimize the fight path, and select the most suitable road entry point to provide reference for forest fire prevention and fight path selection.
This paper has the following innovations: 1. introducing the concept of road entry point and obtaining the optimal forest fire fighting path by selecting road entry points with different linear distances; 2. improving the pheromone update function of the ant colony algorithm to obtain an adaptive ant colony algorithm; and 3. using ArcGIS to materialize DEM data and combining the improved ant colony algorithm to visualize the path on the 3D model.
2. Overview and Modeling of the Study Area
2.1. Overview of Qiqian Forestry Bureau
Qiqian Forestry Bureau is located at the edge of the northern foot of the western slope of the Great Xing‘an Range. Its geographical coordinates are 120°36′18″–121°42′50″ E and 52°01′42″–52°35′00″ N. The total area of the Forestry Bureau is 288,330 hectares, all of which are forest land. Among them, the area of forest land is 273,688 hectares, and the coverage rate of the forest is 95.4%. According to the statistics of the National Bureau of Statistics, in the past five years, there have been four forest fires in Qiqian Forestry Bureau, including two great forest fires and two large fires, as shown in Figure 1. The area of forest overfire is about 1213 hectares, and a total of 2445 people have been put into force, resulting in huge losses of human and material resources, and also a serious impact on China’s ecological environment.
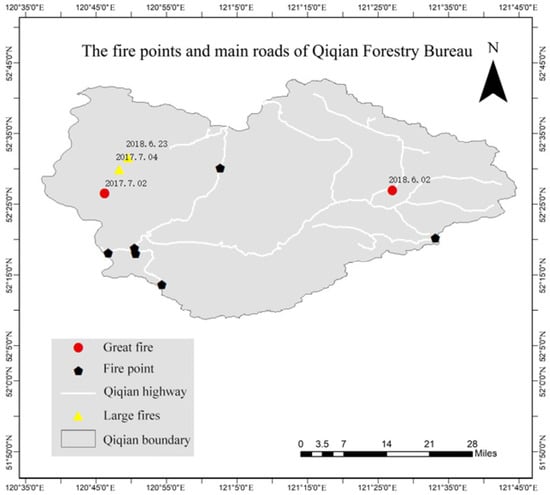
Figure 1.
The fire points and main roads of Qiqian Forestry Bureau.
As shown in Figure 2, the density of the road network in the west of Qiqian Forestry Bureau is relatively low. The mileage of the effective road section in the original forest area is about 331 km, and the total area of the forest area is 288,300 hectares. The density of the road network is about 1.09 m/ha, which is far less than the average density of the road network in the current state-owned forest area of 1.8 m/ha. The distance between the road and the fire point is far, which seriously affects the fire suppression efficiency, leading to the missed optimal time for fire suppression and aggravating the spread of fire [15]. The National Forest Fire Prevention Plan (2016–2025) proposed that the road network density of state-owned forest areas should reach 3.1 m/ha in 2025, indicating that the road network density in the region needs to be improved [16]. The road entry point is the starting point from the existing road into the forest area. When the forest is on fire, a car can only bring the responding team to the nearest road entry point to the fire. The rest of the road must be walked. The fire suppression tools and supplies carried by each person make the weight of each person less than fifty or sixty kilograms, and more than eighty or ninety kilograms. Therefore, reasonable planning of road entry points to ensure that fire-fighting personnel and supplies can quickly reach the fire site is the main purpose of forest fire fighting path planning.
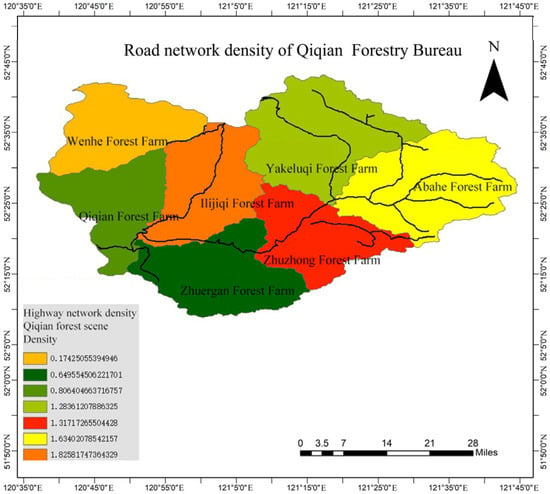
Figure 2.
Road network density of Qi qian Forestry Bureau.
2.2. Environmental Modeling of Qiqian Forestry Bureau
There are many methods for environmental modeling, such as the visual graph method, tangent graph method, grid method, and unit tree method [17]. Since the ant colony algorithm requires parameter assignment and position retrieval of any point in space, it is necessary to rasterize Qiqian Forest Bureau. The digital elevation model (DEM) is a data set of plane coordinates of regular grid points and their elevations within a certain range that mainly describes the spatial distribution of regional geomorphology and is formed by data collection including sampling and measurement through contour lines or similar three-dimensional models, and then data interpolation. Obtain the DEM data of Qiqian Forestry Bureau, determine the coordinates of the virtual fire point (120.7765, 52.3770, 853), intercept the 20 km × 15 km DEM as shown in Figure 3, using ArcGIS to process the obtained real 3D spatial environment information as a function to obtain the longitude, latitude, and altitude data of the study area, and build the three-dimensional spatial model (which is constructed by Matlab drawing tool; the three axes are longitude, latitude and altitude in turn). Figure 4 shows the rasterized view of the 3D model, and the 3D spatial topographic map of the 3D model is shown in Figure 5.
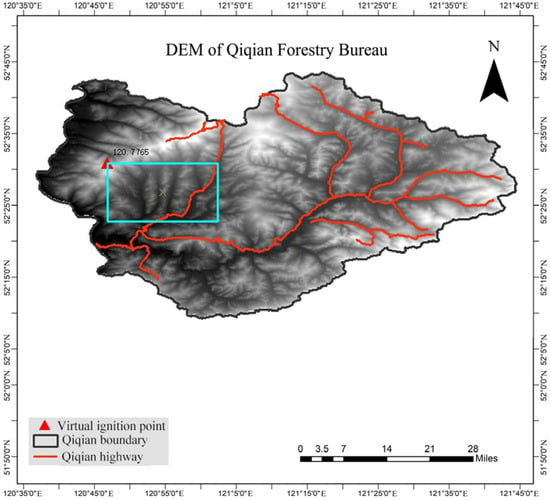
Figure 3.
DEM of Qiqian Forestry Bureau.
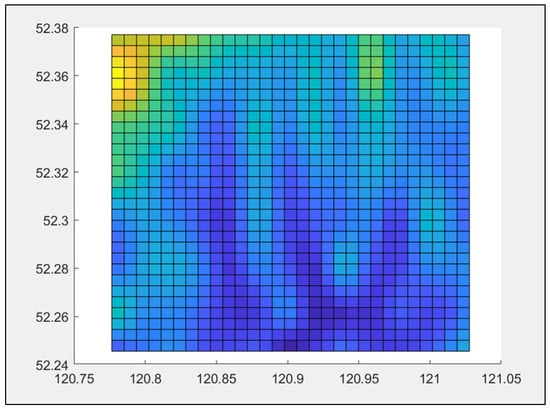
Figure 4.
Rasterized view of the 3D model map.
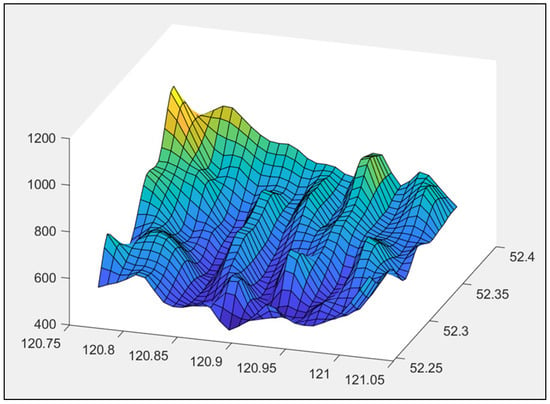
Figure 5.
3D spatial topographic map.
3. Improved Ant Colony Algorithm
3.1. Basic Principles of Ant Colony Algorithm
Ant individuals transmit information through a substance called pheromone. Ant individuals can release pheromones and perceive their strength to guide their movement direction [18]. When they meet an uncrossed intersection, they randomly select a path and release pheromones related to path length, so that the pheromones of shorter paths will be stronger, and the pheromones will also weaken over time. Eventually, a positive feedback is formed: the pheromone concentration on the shorter path becomes larger and larger, while the pheromone concentration on the other paths decreases with time, and eventually the whole colony will find the optimal path [19].
Specific model: NP ants are placed at the starting point. Let S be the starting point for ants to find the shortest path, E be the ending point for the shortest path, and the pheromone (c is a constant) from node S to node E at the beginning of walking. Ants circulate between node S and node E, while the process continuously releases pheromone, so that the shortest path and the concentration of pheromone on the path is proportional to the purpose of finding the shortest path, and the probability of reaching the termination point E is , as shown in Formula (1):
where, is the pheromone volatility factor from node S to node E, is the reciprocal of the path distance from node S to node E, represents the induced factor of ants used for residual pheromone exchange on the walking path and stimulating later ants; is the expected elicitation factor of heuristic information to the direction of ants; represents the set of nodes that the ant has not yet accessed in the walking path, and places the set of nodes that have been accessed in , which is a record table to record the path of the ant.
As time goes on, the pheromone released by the previous ants evaporates. To avoid all ants walking along one path, keep a certain pheromone evaporation rate [20]. The pheromone state information on the path is represented by the volatility coefficient on the path and the pheromone increment in the path node in this iteration.
In the formula, denotes the amount of pheromone left by the k ant between node S and node E. When the k ant does not pass the path from node S to node E, the pheromone left is 0. Q is the enhancement coefficient and is the total path of the k ant.
3.2. Parameter Settings of Improved Ant Colony Algorithm
Pheromone is an important parameter determining whether ant colony algorithm can find the optimal path effectively [21]. The pheromone and heuristic factor parameters of basic ant colony algorithm are generally set according to experience. When the parameter setting is unreasonable, it will lead to complex operation or only obtain local optimal solution. To solve the above problems, there are usually two improved methods: (1) The ant colony algorithm is combined with reinforcement learning, genetic algorithm and other optimization algorithms to optimize the ant colony algorithm; (2) The parameter settings are optimized, and the parameters such as pheromone release, ant population, and pheromone weighting value are optimized [22]. In this paper, the pheromone volatility coefficient of ant colony algorithm is improved to solve the problem of ant colony algorithm falling into local optimal solution.
In view of the complex mountainous environment, when the problem scale of the required solution is relatively large, the ant colony algorithm suffers from long search time and easy stagnation during the search of paths in the process of computation. The ants select the appropriate path according to the pheromone concentration and the larger the pheromone concentration, the more times are selected, thus leading more ants to select this node [23]. If the pheromone on the raster is not processed after the current path finding is finished, the concentration of pheromone left over from the previous time keeps accumulating when the path is found next time, and the local search capability of the algorithm will exceed the global search capability.
In order to avoid the algorithm falling into local optimum with the increase of time and cycle number and avoid the influence of mountainous terrain on path search, this paper proposes the adaptive pheromone volatility coefficient. With the increase of iteration number , it presents a change process from large to small, rather than a fixed constant. By adaptive adjustment of the pheromone volatility coefficient, the algorithm can improve the time efficiency and solution accuracy in path search., the specific relationship is shown in Formula (5).
Formula: k is a constant, adjusted according to specific circumstances; N is the number of iterations.
3.3. Improved Ant Colony Algorithm Process
The steps of the algorithm are as follows:
Step 1: Initialize the parameters, model the abstract environment according to the environment of Qiqian forest area, determine the starting point, the location and search direction of the target point, and place all the ants at the starting point. Start K—round ants foraging activities, each round sent NP ants;
Step 2: Let all ants find the next node a, and use roulette wheel gambling method to randomly select the next node b to avoid falling into local optimal solution before global search;
Step 3: Determine whether all ants in each group have completed the path, calculate the shortest path length and average path length in a single iteration; if completed to step 2 and then select the next node, otherwise step 4;
Step 4: Determine whether the algorithm satisfies the stopping condition, if so, output the optimal path and end, otherwise, update the global pheromone and go to step 2.
The specific process is shown in Figure 6.
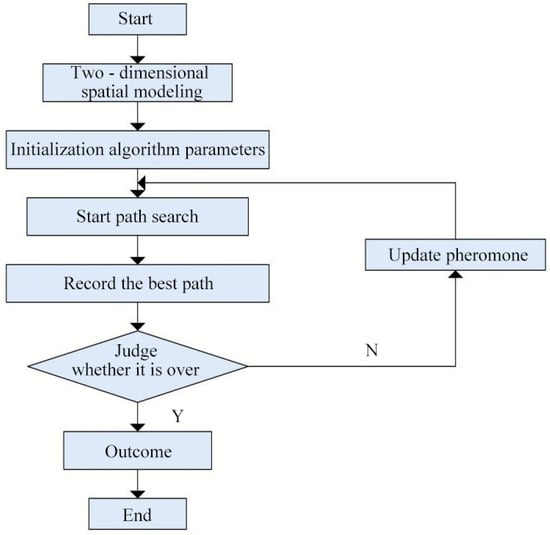
Figure 6.
Flow chart of improved ant colony algorithm.
4. Experimental Simulation
4.1. Experimental Parameters Setting
In order to verify the solution performance of the improved ant colony algorithm on the fire-fighting path in the forest area, this section uses MATLAB as the simulation platform to model the three-dimensional terrain. As shown in Figure 7, according to the straight-line distance from the fire point as the selection basis, six road entry points with different distances of 17 km, 18 km, 20.9 km, 20.4 km, 22.7 km and 24.5 km were selected as the starting points for the basic and improved ant colony algorithm experiments. The no-algorithm situation is more random and mainly judged by fire-fighting personnel for human judgment, which cannot determine the specific path, so this paper only conducts the path comparison before and after the improvement of the ant colony algorithm. The specific settings of the experiment are shown in Table 1, among them, number of iterations is 100, parameters of pheromone importance is 1, probability of pheromone decay is 0.2, parameter of heuristic factor importance is 5, intensity coefficient of pheromone increase is 2000.
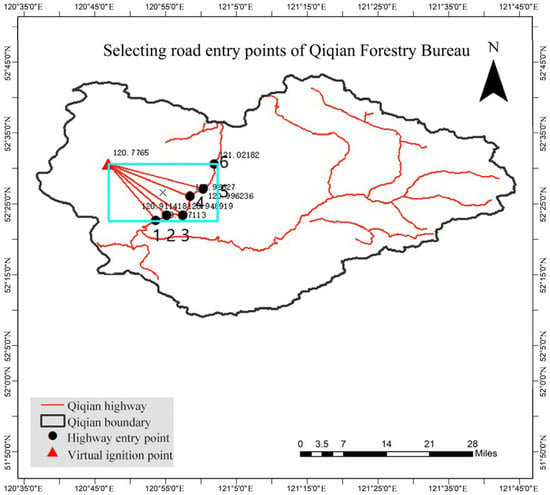
Figure 7.
Selection of road entry point diagram.

Table 1.
Experimental parameters setting.
4.2. Experimental Results and Analysis
As shown in Figure 8, it is a three-dimensional path comparison diagram before and after the improvement of point 1–point 6. As shown in Figure 9, it is the comparison of path convergence curves from point 1 to point 6.
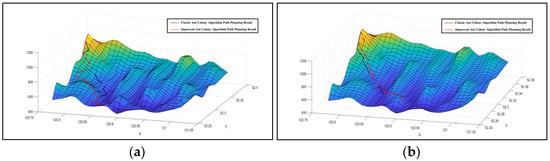
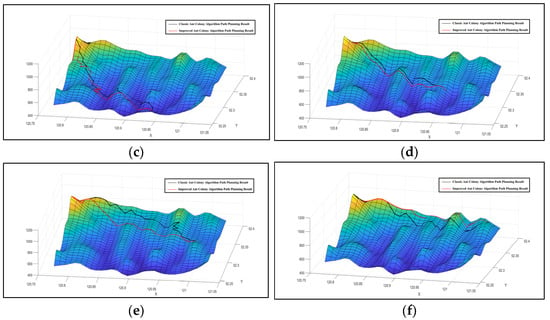
Figure 8.
Three-dimensional path contrast map before and after improvement. (a) Comparison of the three-dimensional path of point 1,(b) Comparison of the three-dimensional path of point 2, (c) Comparison of the three-dimensional path of point 3, (d) Comparison of the three-dimensional path of point 4, (e) Comparison of the three-dimensional path of point 5 and (f) Comparison of the three-dimensional path of point 6.
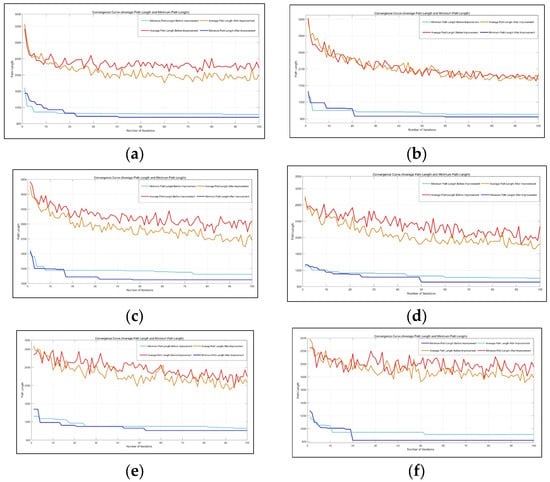
Figure 9.
The path convergence curve comparison chart. (a) Comparison of path convergence curves for point 1, (b) Comparison of path convergence curves for point 2, (c) Comparison of path convergence curves for point 3, (d) Comparison of path convergence curves for point 4, (e) Comparison of path convergence curves for point 5 and (f) Comparison of the three-dimensional path of point 6.
The comparison of required path length before and after improvement is shown in Table 2. In Experiment 1, the path length before improvement was 102.8 km, the path length after improvement was 95.61 km, and the shortened path was 7.19 km, about 7.0% of that before improvement. In Experiment 2, the path length before improvement was 101.00 km, the path length after improvement was 94.60 km, and the shortened path was 6.4 km, about 6.4% of that before improvement. In Experiment 3, the path length before improvement was 124.70 km, the path length after improvement was 109.90 km, and the shortened path was 14.8 km, about 11.9% of that before improvement. In Experiment 4, the path length before improvement was 100.40 km, the path length after improvement was 90.90 km, and the shortened path was 9.5 km, about 9.5% of that before improvement. In Experiment 5, the path length before improvement was 106.00 km, the path length after improvement was 101.10 km, and the shortened path was 4.9 km, about 4.6% of that before improvement. In Experiment 6, the path length before improvement was 90.89 km, the path length after improvement was 81.88 km, and the shortened path was 9.01 km, about 9.9% of that before improvement. The improved path length shown in the path planning research with the road entry point as the starting point under different linear distances is smaller than that before the improvement, indicating that the updating and improvement method for pheromone in this paper can effectively deal with the optimization problem of cross-country road fire suppression path in forest environment. At the same time, the paths before and after optimization and the degree of optimization corresponding to different road entry points are different, and the road entry point with longer linear distance in this experiment shows the shortest cross-country path distance and better optimization degree, that is, the results obtained in experiment 6.
Table 2.
Algorithm Simulation Data Comparison.
5. Discussion and Conclusions
In order to deal with the threat of forest fire to forestry resources and improve the efficiency of forest fire fighting, this paper takes Qiqian Forestry Bureau in the northern Great Xing‘an Range of Inner Mongolia as the research object, simulates a fire point far from the road, selects the road entry point with different linear distances from the fire point, and improves the basic ant colony algorithm. The specific conclusions are as follows:
- (1)
- Based on the analysis of the forest fires in the past five years and the current situation of the road network, it is found that the density of the road network is about 1.09 m/ha, which is far lower than the average density of the current state-owned forest network, 1.8 m/ha. The distance between the road and the fire point seriously affects the efficiency of fire suppression, and it is easy to miss the best time for fire suppression.
- (2)
- The ant colony algorithm is used as the off-road rescue path search algorithm for forest fire, and the pheromone volatilization in the model is adaptively adjusted. The pheromone volatilization coefficient is reduced by multiple iterations, and the accuracy of the algorithm in the path search is improved.
- (3)
- By conducting simulation experiments on six road entry points at different linear distances from the fire point, the road entry point farthest from the fire point requires the smallest cross-country path, and the optimal fire-fighting path is obtained.
- (4)
- The density of the road network in most domestic forest areas is much smaller than that of forest areas in developed countries, which limits the ability to fight forest fire. For the primitive forest areas where the road network is not developed and the forest area is complicated, once a forest fire occurs, the transportation of rescue personnel and materials is important for the firefighting. Therefore, choosing the road entry point with the shortest path can effectively reduce the fire rescue time. This method has great reference value for the situation where the fire point is far away from the road, provides theoretical support for the non-road firefighting path planning in forest areas, and contributes to the reduction of forest resource losses caused by fires.
This paper studies the path planning of forest off-road firefighting based on an improved ant colony algorithm. The simulation results show that the improved ant colony algorithm has higher efficiency in a global search of the path and can find the shortest path in less time. In order to facilitate the calculation, the improved ant colony algorithm proposed in this paper does not consider the factors such as the spread speed of the fire and the influence of different slopes on the walking speed of the rescue personnel. However, in the actual forest fire rescue task, the method described in this paper can still be used as the basis of path planning, and the road entry point with the shortest off-road firefighting path is selected in rescue scenarios with different road entry points. It plays a guiding role in the fire rescue of the northern forest area of the Great Xing‘an Range in Inner Mongolia, promotes the modernization and scientization of forest fire prevention work in China, more effectively protects China’s forest resources, and realizes the sustainable development of forestry.
Author Contributions
Z.L. and S.S.: conceptualization, methodology; Z.L.: software; Z.L. and M.Y.: validation; Z.L.: formal analysis, writing—original draft preparation; M.Y and S.S.: supervision; F.Y., H.Y., and S.S.: writing—review and editing. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by National Natural Science Foundation of Heilongjiang Province, grant number LH2020C052.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data presented in this study are available upon request from the corresponding author.
Conflicts of Interest
The authors declare that they have no competing financial interest or personal relationships that could have appeared to influence the work reported in this manuscript.
References
- Wang, W.; Zhang, X.L.; Dou, X.; Li, F.; Sun, L.; Hu, T.X. Effects of moderate fire disturbance on soil phosphorus and potassium elements in Xing’an larch forest. For. Eng. 2020, 36, 10–18. [Google Scholar] [CrossRef]
- Parks, G.M. Development and application of a model for suppression of forest fires. Manag. Sci. 2011, 10, 760–766. [Google Scholar] [CrossRef]
- Zhang, S. Research on Optimization Design of Guangzhou Forest Fire Emergency Logistics System. Master’s Thesis, Central South University of Forestry and Technology, Changsha, China, 2012. [Google Scholar]
- Liu, T.C. Research on urban fire emergency system based on 3D GIS. Tech. Inf. 2019, 17, 17–19. [Google Scholar]
- Wang, G.; Zhang, F.; Yan, D.L.; Jiang, Q.; Chen, Z.W. Robot 3D path planning based on improved ant colony algorithm. Foreign Electron. Meas. Technol. 2020, 39, 1–6. [Google Scholar]
- Huang, L.; Hu, W.W. 3D path planning of fruit and vegetable picking robot based on improved ant colony algorithm. Res. Agric. Mech. 2016, 38, 38–42. [Google Scholar]
- Colorni, A. Distributed optimization by ant colonies. In Proceedings of the first European Conference on Artificial Life; The MIT Press: Cambridge, MA, USA, 1991. [Google Scholar]
- Wang, H.B.; Huang, M.; Huang, X.L. Path planning of fire robot based on improved ant colony algorithm. J. Beijing Univ. Inf. Technol. 2021, 36, 82–87. [Google Scholar]
- Bu, S.Q.; Mei, M.; Li, Q.Q.; Yang, J.F.; Wang, D.M. Research on trajectory tracing technology of forest fire robots. For. Eng. 2020, 36, 44–52. [Google Scholar] [CrossRef]
- Tian, S.C.; Zhou, Z.Q.; Wang, T.J.; Xia, Q.; Wen, Z.H.; Wang, B.X.; Liu, L. Logistics Support Path Planning Model of Forest Fire Based on Ant Colony Algorithm. J. Phys. Conf. Ser. 2020, 1575, 012118. [Google Scholar] [CrossRef]
- Cheng, J.T. Vision-Based Fire Detection Mobile Robot and Its Path Planning Research. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2016. [Google Scholar]
- Cui, J.K. Research on UAV Path Planning Algorithm for Power Grid Patrol and Forest Fire Monitoring. Master’s Thesis, Xi’an University of Technology, Xi’an, China, 2017. [Google Scholar]
- Xie, Z.G. Study on the flora and floristic geographical elements of the primeval forest region in the Northern Daxing’an Mountains, Inner Mongolia. For. Resour. Manag. 2017, 2, 88–92. [Google Scholar]
- Sun, S.F.; Wang, L.J.; Wang, W. Study on reserve and dispatch of forest fire emergency resources in the northern primeval forest region of Daxing’an Mountains, Inner Mongolia. J. Cent. South Univ. For. Technol. 2020, 40, 10–16. [Google Scholar]
- Alcasena, F.J.; Ager, A.A.; Salis, M.; Day, M.A.; Vega-Garcia, C. Optimizing prescribed fire allocation for managing fire risk in central Catalonia. Sci. Total Environ. 2018, 621, 855–872. [Google Scholar] [CrossRef] [PubMed]
- The State Forestry Administration, the national development and Reform Commission and the Ministry of Finance jointly issued the national forest fire prevention plan (2016–2025). China Emerg. Manag. 2017, 1, 34–44.
- Zhang, N.N.; Jiang, W.G.; Dou, G. Research on Improved Ant Colony Algorithm in AUV 3D path planning. Comput. Eng. Appl. 2019, 55, 265–270. [Google Scholar]
- Wan, X.F.; Hu, W.; Fang, W.Y. Research on robot path planning based on improved ant colony algorithm. Comput. Eng. Appl. 2014, 50, 63–66. [Google Scholar]
- Bei, Q.C.; Pei, Y.C.; Liu, H.Y. Robot path planning based on improved classical ant colony algorithm. Shandong Electr. Power Technol. 2020, 47, 24–27. [Google Scholar]
- He, G.Q.; Huang, X. Application of ant colony algorithm in UAV logistics path planning. Mod. Comput. 2021, 27, 56–60. [Google Scholar]
- Feng, S.F.; Lei, Q.; Wu, W.L. Path planning of mobile robot based on adaptive ant colony algorithm. Comput. Eng. Appl. 2019, 39, 5329–5338. [Google Scholar]
- Zhang, H.; Jiang, X.M.; Yu, F. Ship course automatic control system based on improved ant colony algorithm. Autom. Inf. Eng. 2021, 42, 7–11. [Google Scholar]
- Gu, Y.; Duan, J.J.; Su, Y.X.; Yuan, Y.Y. Path planning of warehousing and logistics robot based on improved ant colony algorithm. J. Wuhan Univ. Technol. 2020, 44, 688–693. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).