
Evaluation of Positioning Accuracy of Smartphones under Different Canopy Openness
 , ,
, , 
Abstract
1. Introduction
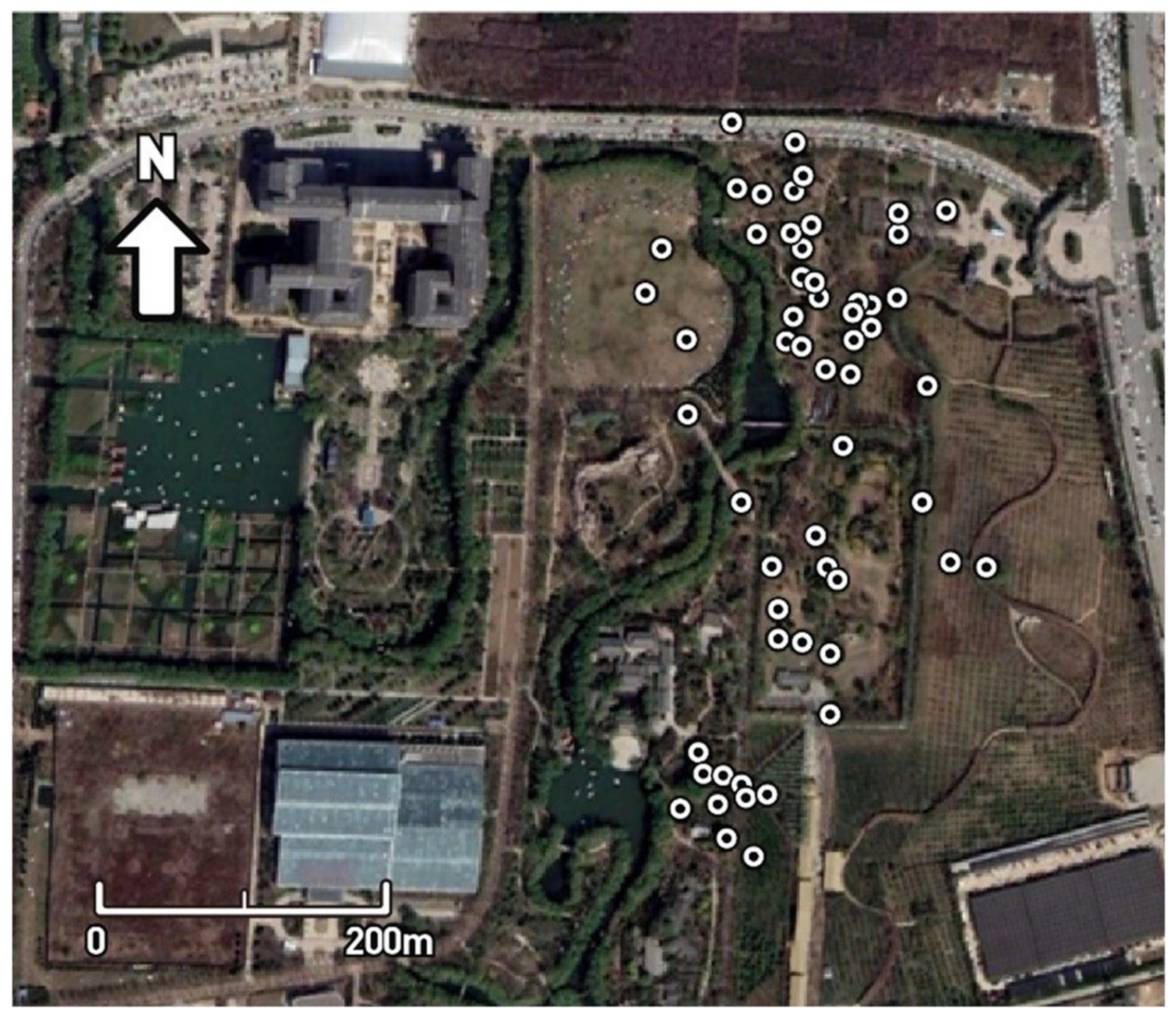
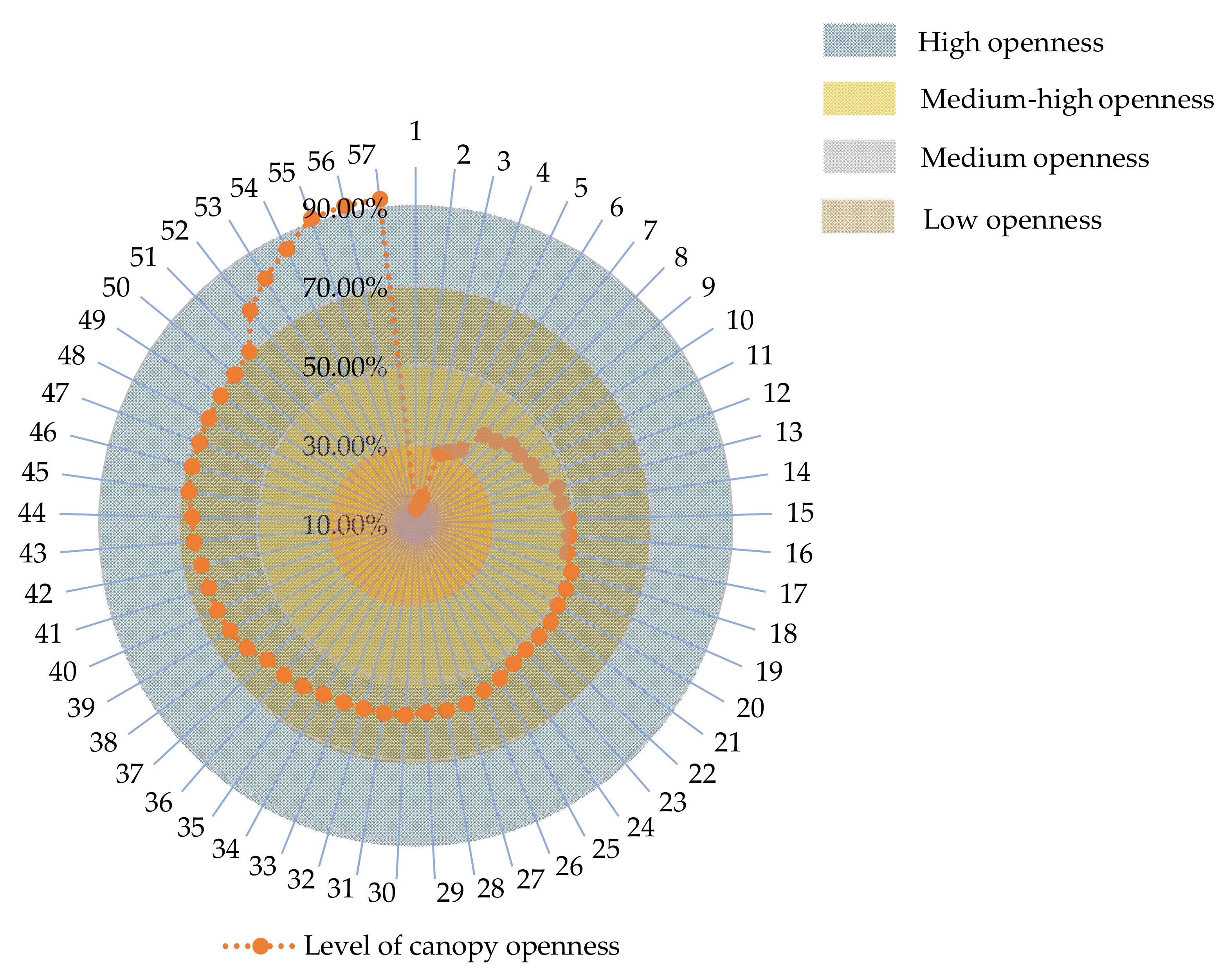
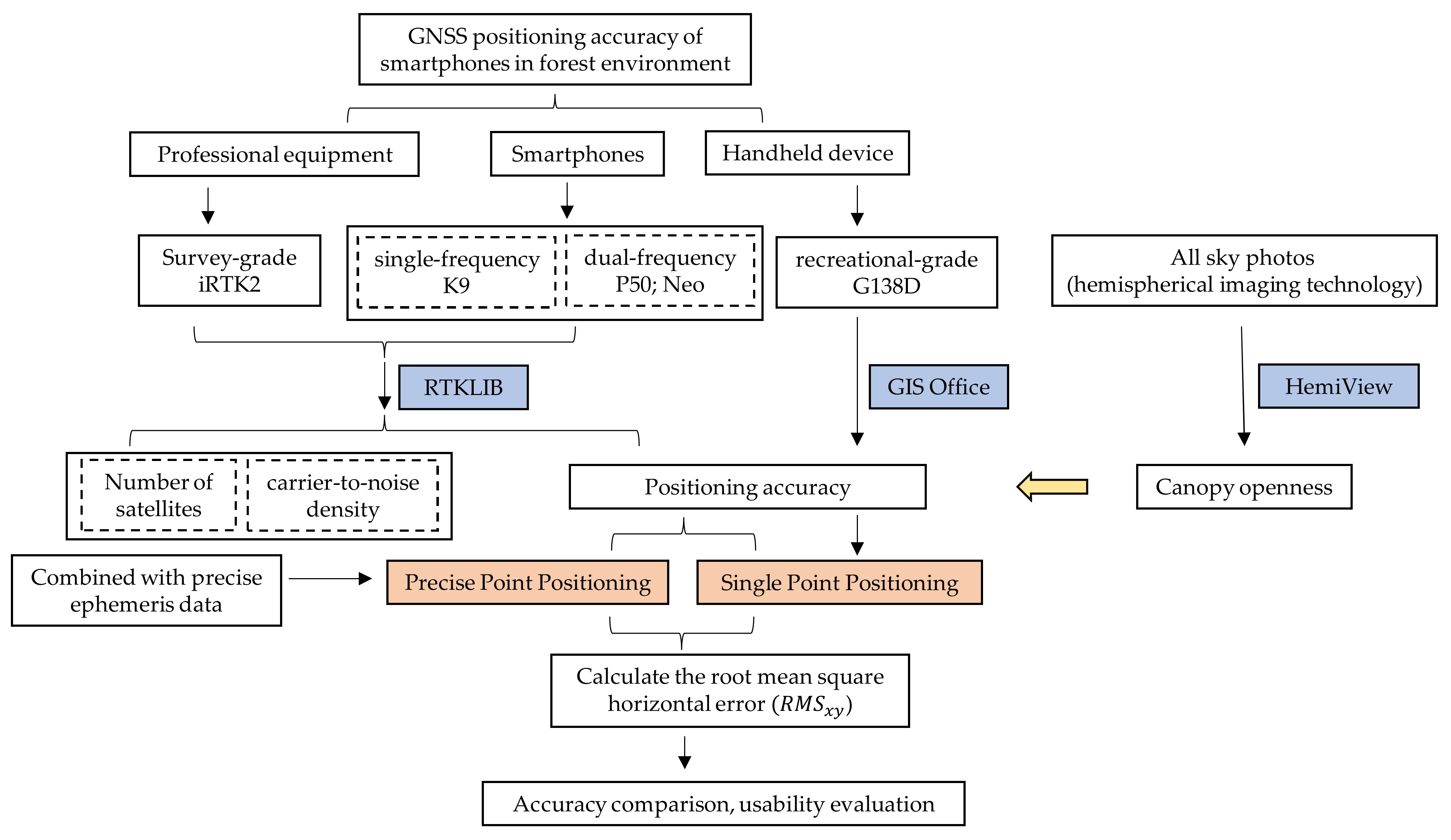
2. Materials and Methods
2.1. Test Devices
2.2. Method
2.3. Data Processing
3. Results
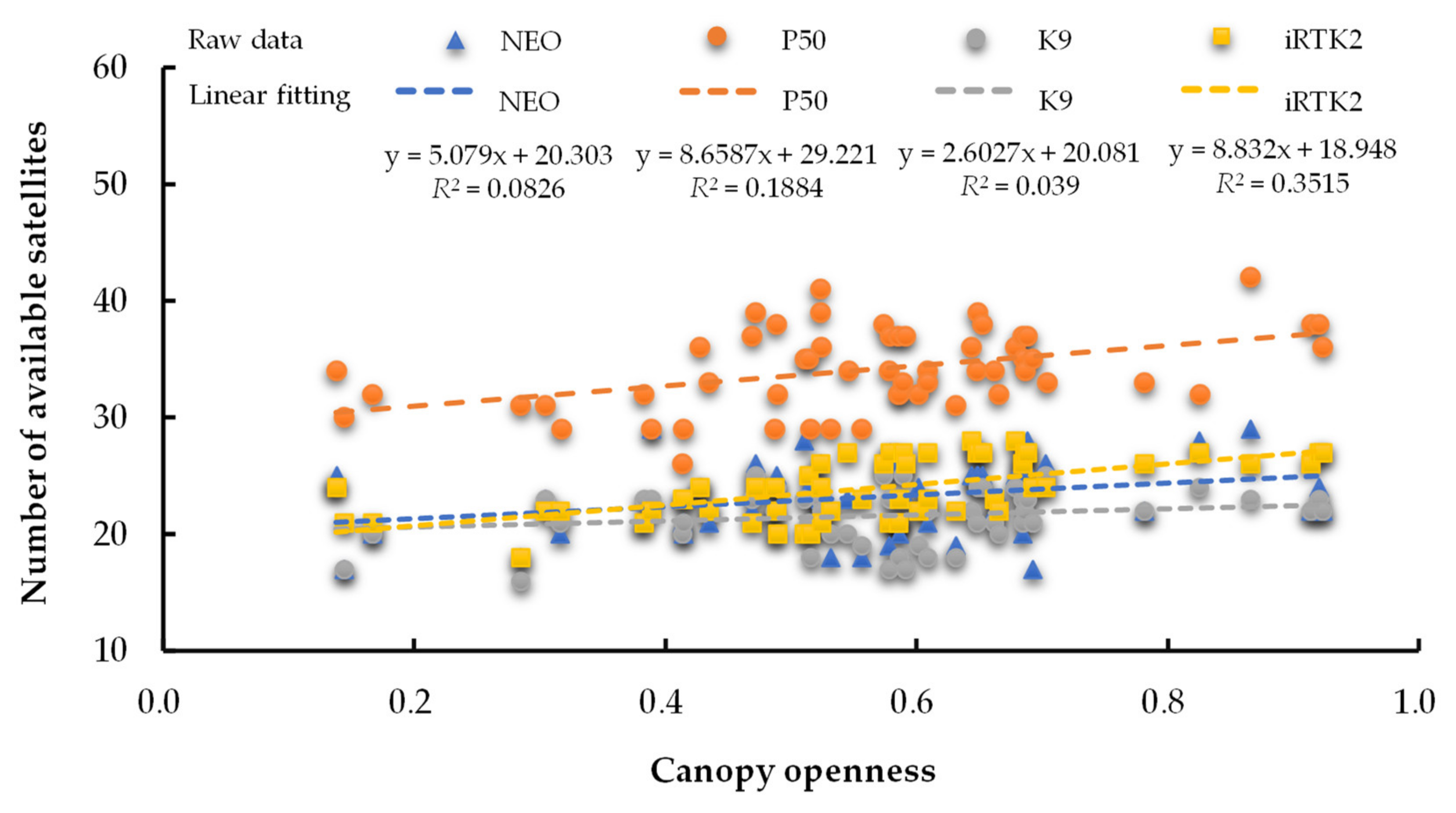
3.1. Influence of Canopy Openness on the Number of Observation Satellites and Signal Quality
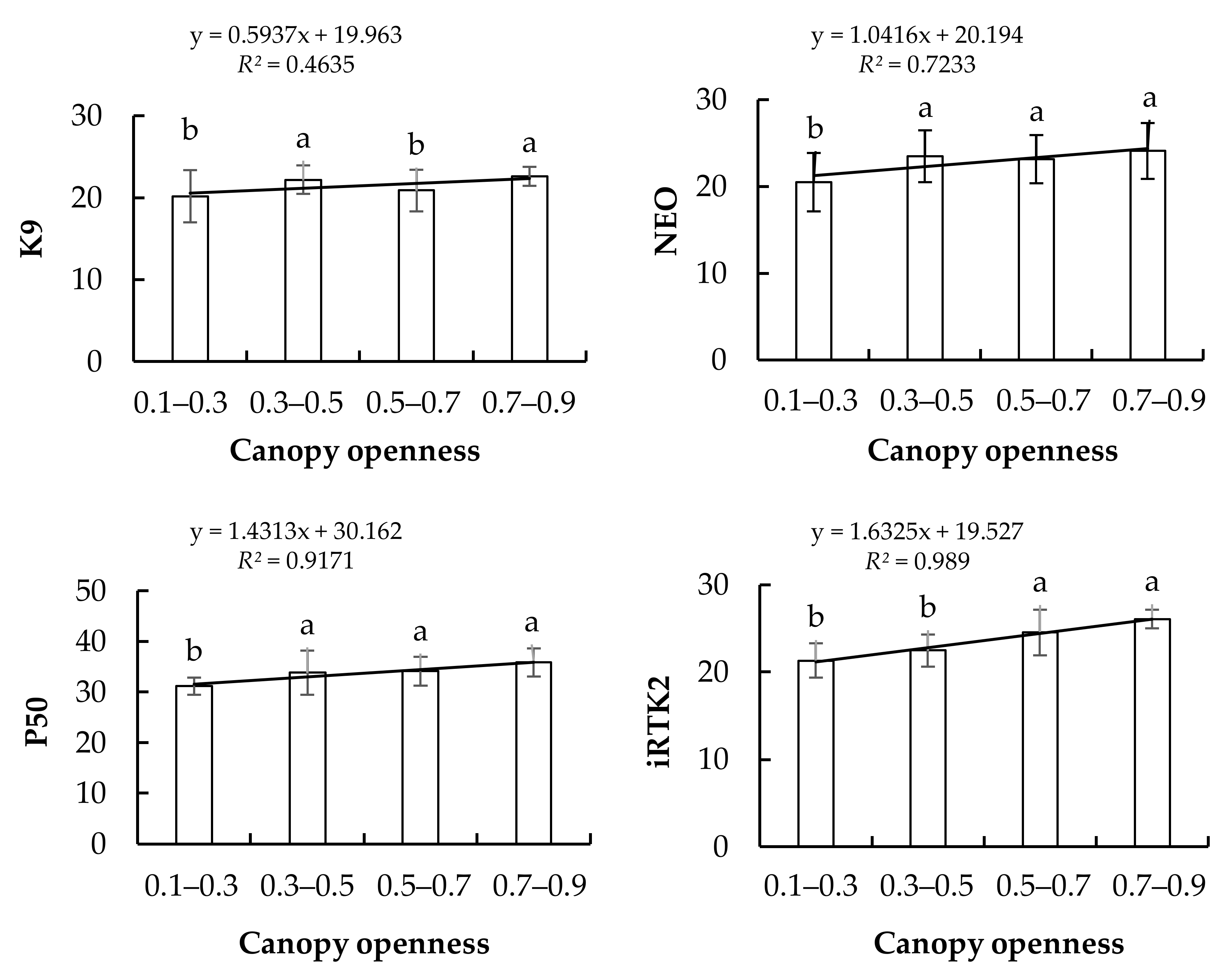
3.1.1. Influence of Canopy Openness and Equipment on the Number of Available Satellites
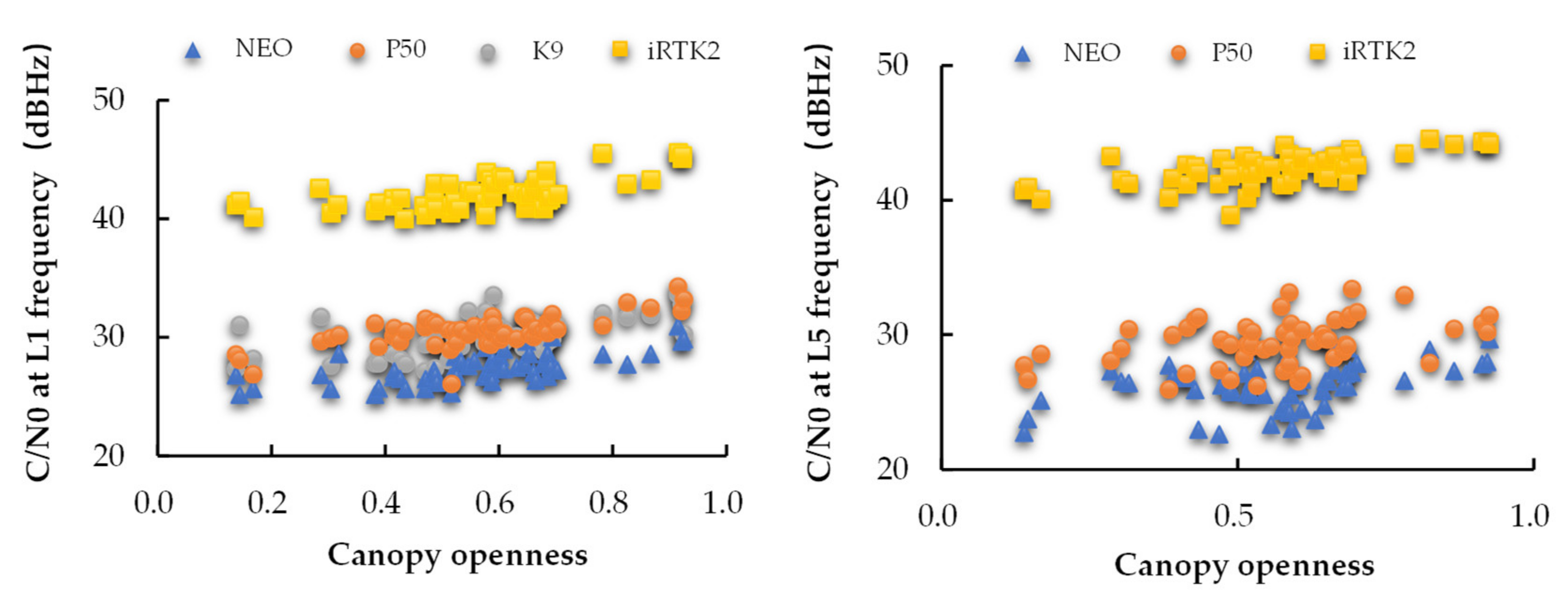
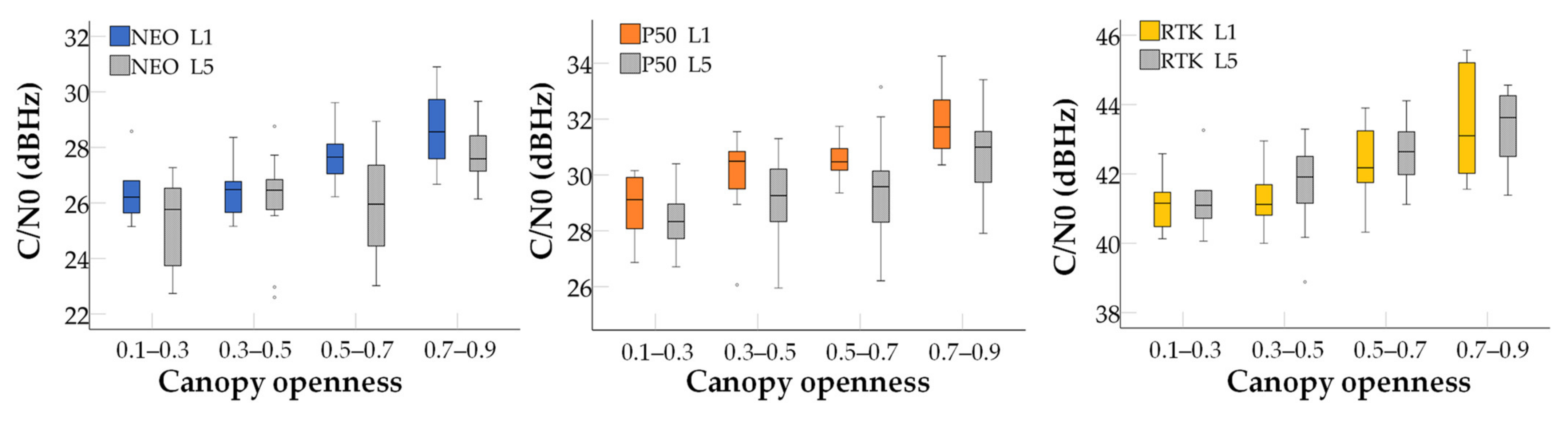
3.1.2. Influence of Canopy Openness and Equipment on Carrier-to-Noise Density
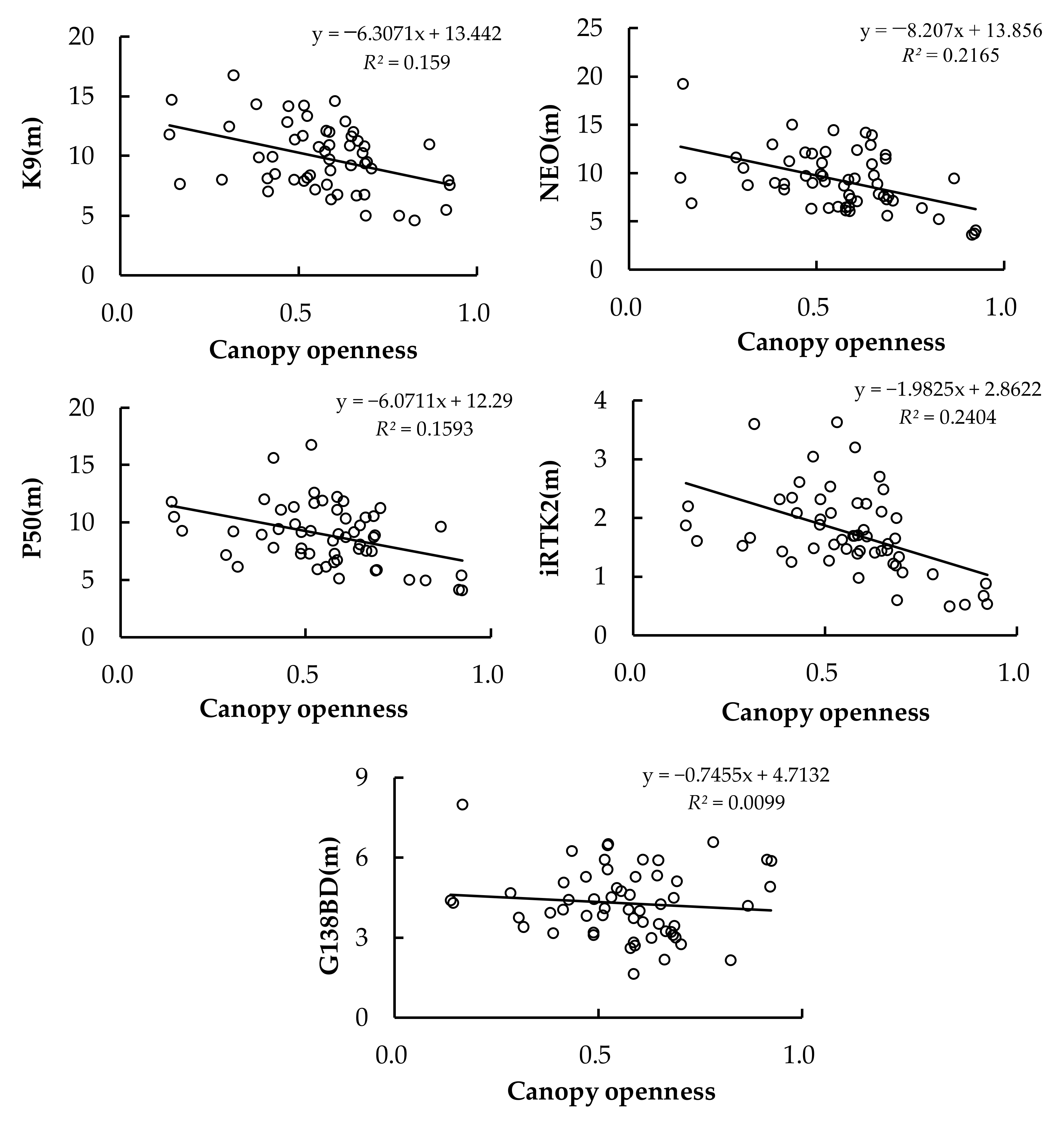
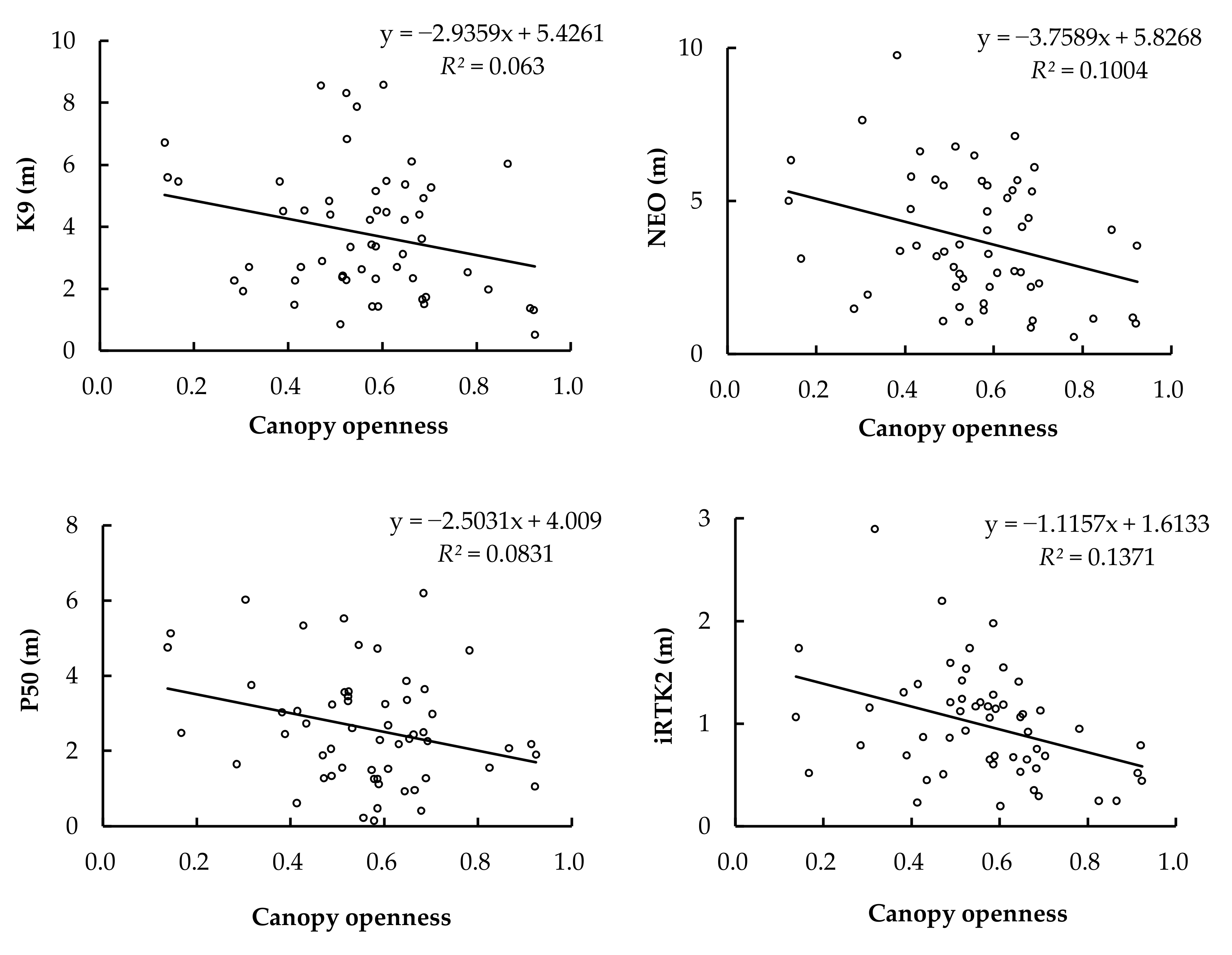
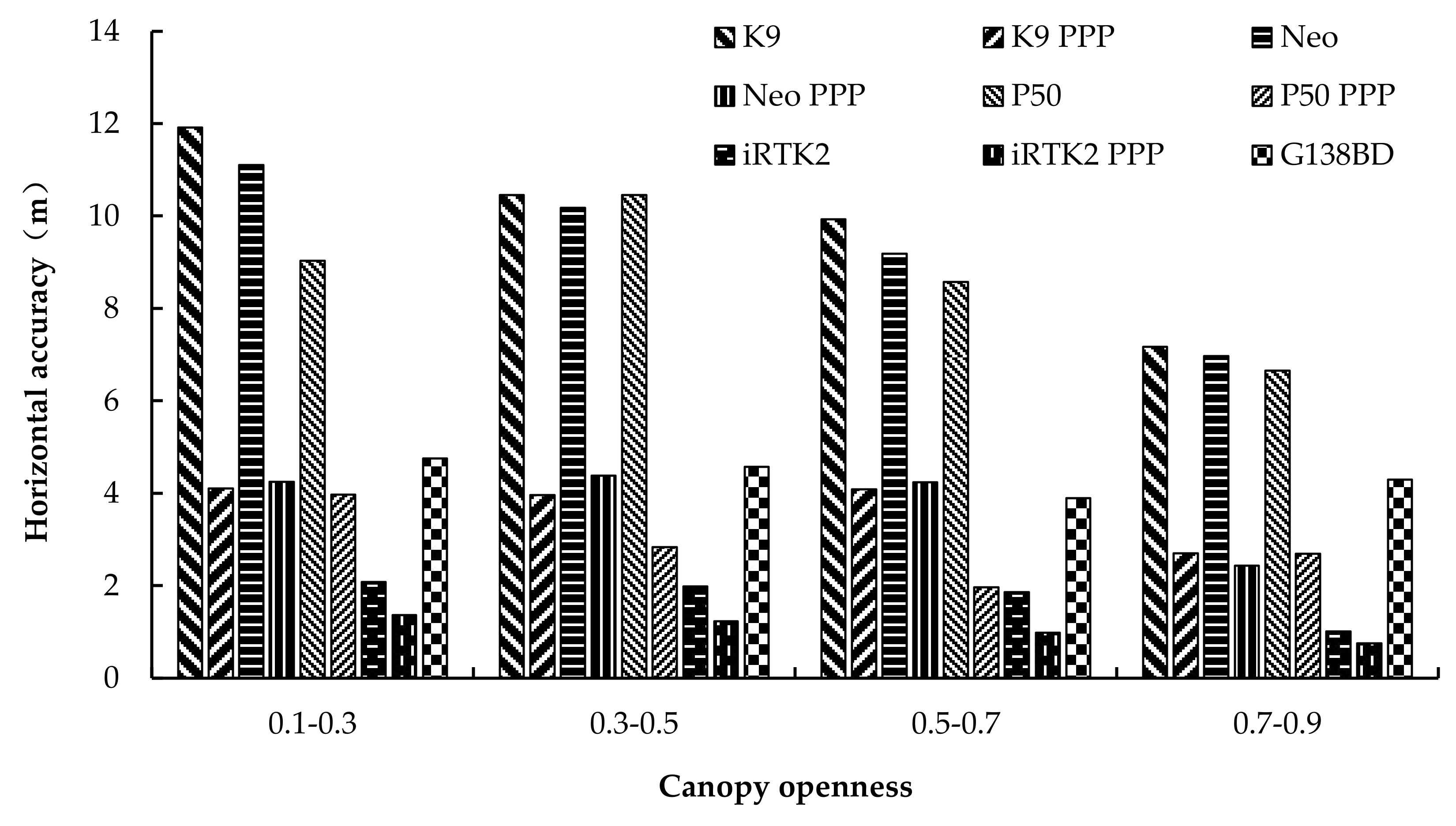
3.2. Relationship between Canopy Openness and Positioning Accuracy in Single-Point Positioning (SPP) Mode
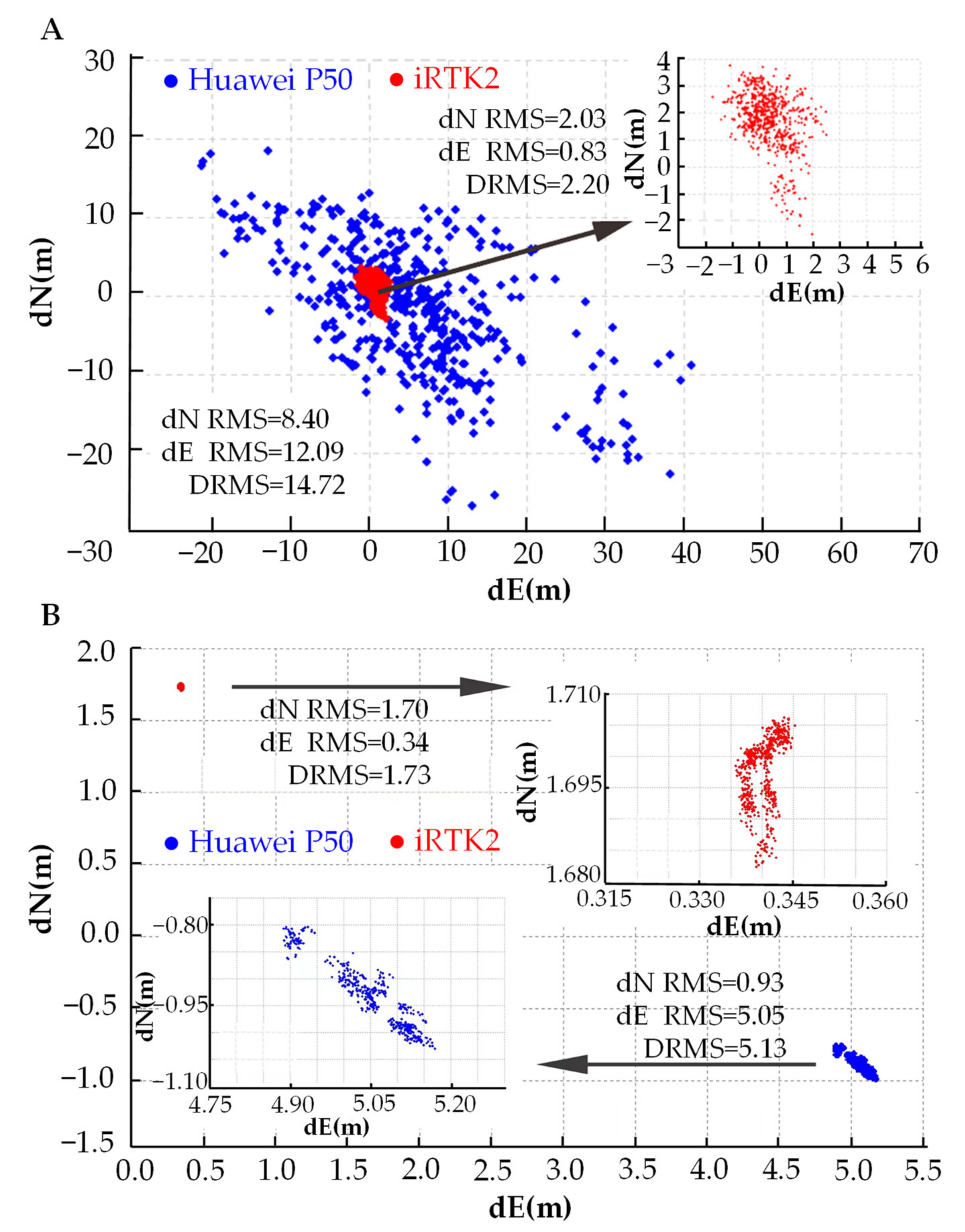
3.3. Correction of Raw Location Data of Smartphone by PPP Mode
4. Discussion
4.1. Number of Observation Satellites and Signal Quality of GNSS Devices in a Forest Environment
4.2. Original Positioning Accuracy of GNSS Devices under the Forest
4.3. Availability Evaluation of Smartphone Positioning in a Forest Environment
5. Conclusions
- The number of available satellites for dual-frequency smartphones and survey-grade receivers was significantly positively correlated with canopy openness (p < 0.05). There was a significant positive correlation between canopy openness and C/N0 (p < 0.05).
- The C/N0 of survey-grade receivers is significantly higher than that of smartphones. In addition to recreational-grade devices, the positioning accuracy of smartphones and survey-grade devices improves with the increase in canopy openness. However, there is a threshold value for improvements in the positioning accuracy of the device by openness.
- In SPP mode, the horizontal accuracy of the smartphone is low. The positioning accuracy of survey-grade and recreational-grade devices in all directions is better than that of smartphones. In comparison, the positioning accuracy of dual-frequency smartphones in smartphones is better than that of single-frequency smartphones.
- After PPP-mode correction, the positioning accuracy of smartphones is improved by 2–4-times. The positioning accuracy of smartphones in all directions is better than that of recreational-grade devices, while survey-grade devices still maintain the highest positioning accuracy. When the canopy openness is greater than 0.7, the smartphone can reach a positioning accuracy of about 2.5 m.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fernandez-Prades, C.; Presti, L.L.; Falletti, E. Satellite radiolocalization from GPS to GNSS and beyond: Novel technologies and applications for civil mass market. Proc. IEEE 2011, 99, 1882–1904. [Google Scholar] [CrossRef]
- Li, X.; Zhang, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Precise positioning with current multi-constellation global navigation satellite systems: GPS, GLONASS, Galileo and BeiDou. Sci. Rep. 2015, 5, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Poolsin, C.; Sa-Ngiam, N.; Sutthisangiam, N. Development of Centimeter Level Positioning Mobile Based Application. In Proceedings of the 2021 23rd International Conference on Advanced Communication Technology (ICACT), PyeongChang, Korea, 7–10 February 2021; pp. 63–67. [Google Scholar]
- Realini, E.; Caldera, S.; Pertusini, L.; Sampietro, D. Precise GNSS positioning using smart devices. Sensors 2017, 17, 2434. [Google Scholar] [CrossRef] [PubMed]
- Schaefer, M.; Woodyer, T. Assessing absolute and relative accuracy of recreation-grade and mobile phone GNSS devices: A method for informing device choice. Area 2015, 47, 185–196. [Google Scholar] [CrossRef]
- Dabove, P.; Di Pietra, V.; Piras, M. GNSS positioning using mobile devices with the android operating system. ISPRS Int. J. Geo-Inf. 2020, 9, 220. [Google Scholar] [CrossRef]
- Karki, B.; Won, M. Characterizing Power Consumption of Dual-Frequency GNSS of Smartphone. In Proceedings of the GLOBECOM 2020-2020 IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar]
- Wang, L.; Groves, P.D.; Ziebart, M.K. Smartphone shadow matching for better cross-street GNSS positioning in urban environments. J. Navig. 2015, 68, 411–433. [Google Scholar] [CrossRef]
- Pesyna, K.M.; Heath, R.W.; Humphreys, T.E. Centimeter positioning with a smartphone-quality GNSS antenna. In Proceedings of the 27th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2014), Tampa, FL, USA, 8–12 September 2014; pp. 1568–1577. [Google Scholar]
- Dabove, P.; Manzino, A.M. Accurate real-time GNSS positioning assisted by tablets: An innovative method for positioning and mapping. GEAM Geoing. Ambient. E Min. 2016, 148, 17–22. [Google Scholar]
- Herrera, A.M.; Suhandri, H.F.; Realini, E.; Reguzzoni, M.; de Lacy, M. goGPS: Open-source MATLAB software. GPS Solut. 2016, 20, 595–603. [Google Scholar] [CrossRef]
- Humphreys, T.E.; Murrian, M.; Van Diggelen, F.; Podshivalov, S.; Pesyna, K.M. On the feasibility of cm-accurate positioning via a smartphone’s antenna and GNSS chip. In Proceedings of the 2016 IEEE/ION Position, Location and Navigation Symposium (PLANS), Savannah, GA, USA, 11–14 April 2016; pp. 232–242. [Google Scholar]
- Fortunato, M.; Critchley-Marrows, J.; Siutkowska, M.; Ivanovici, M.L.; Benedetti, E.; Roberts, W. Enabling high accuracy dynamic applications in urban environments using PPP and RTK on android multi-frequency and multi-GNSS smartphones. In Proceedings of the 2019 European navigation conference (ENC), Warsaw, Poland, 9–12 April 2019; pp. 1–9. [Google Scholar]
- Robustelli, U.; Baiocchi, V.; Pugliano, G. Assessment of dual frequency GNSS observations from a Xiaomi Mi 8 Android smartphone and positioning performance analysis. Electronics 2019, 8, 91. [Google Scholar] [CrossRef]
- Wu, Q.; Sun, M.; Zhou, C.; Zhang, P. Precise point positioning using dual-frequency GNSS observations on smartphone. Sensors 2019, 19, 2189. [Google Scholar] [CrossRef]
- Yan, L.; Qi, X.; Yang, J.Z.; Qiu, M.L.; Cai, J.Z. Key Technologies Analysis and Market Status of High Precision Positioning Based on Mobile Phone. In Proceedings of the China Satellite Navigation Conference, Chengdu, China, 23–25 May 2020; pp. 288–297. [Google Scholar]
- Liu, Y.; Gao, C.; Chen, B.; Zhang, R. Pseudo-range single point and differential positioning accuracy test based on android smartphone. In Proceedings of the China Satellite Navigation Conference, Beijing, China, 22–25 May 2019; pp. 72–81. [Google Scholar]
- Warnant, R.; Vyvere, D.; Van, L.; Warnant, Q. Positioning with single and dual frequency smartphones running Android 7 or later. In Proceedings of the 31st international technical meeting of the satellite division of the Institute of Navigation (ION GNSS+ 2018), Miami, FL, USA, 24–28 September 2018; pp. 284–303. [Google Scholar]
- Chen, B.; Gao, C.; Liu, Y.; Sun, P. Real-time precise point positioning with a Xiaomi MI 8 android smartphone. Sensors 2019, 19, 2835. [Google Scholar] [CrossRef]
- Danskin, S.; Bettinger, P.; Jordan, T. Multipath mitigation under forest canopies: A choke ring antenna solution. For. Sci. 2009, 55, 109–116. [Google Scholar]
- McGaughey, R.J.; Ahmed, K.; Andersen, H.-E.; Reutebuch, S.E. Effect of occupation time on the horizontal accuracy of a mapping-grade GNSS receiver under dense forest canopy. Photogramm. Eng. Remote Sens. 2017, 83, 861–868. [Google Scholar] [CrossRef]
- Smyrnaios, M. Carrier-Phase Multipath in Satellite-Based Positioning; Leibniz Universität Hannover: Hannover, Germany, 2016. [Google Scholar]
- Valbuena, R.; Mauro, F.; Rodriguez-Solano, R.; Manzanera, J. Accuracy and precision of GPS receivers under forest canopies in a mountainous environment. Span. J. Agric. Res. 2010, 8, 1047–1057. [Google Scholar] [CrossRef]
- Merry, K.; Bettinger, P. Smartphone GPS accuracy study in an urban environment. PLoS ONE 2019, 14, e0219890. [Google Scholar] [CrossRef]
- Piedallu, C.; Gégout, J.-C. Effects of forest environment and survey protocol on GPS accuracy. Photogramm. Eng. Remote Sens. 2005, 71, 1071–1078. [Google Scholar] [CrossRef]
- Rodríguez Pérez, J.R.; Álvarez Taboada, M.F.; Sanz Ablanedo, E.; Gavela, A. Comparison of GPS Receiver Accuracy and Precision in Forest Environments. Practical Recommendations Regarding Methods and Receiver Selection. In Proceedings of Shaping the Change XXIII FIG Congress, Munich, Germany, 8–13 October 2006. [Google Scholar]
- Galán, C.O.; Rodríguez-Pérez, J.R.; Torres, J.M.; Nieto, P.G. Analysis of the influence of forest environments on the accuracy of GPS measurements by using genetic algorithms. Math. Comput. Model. 2011, 54, 1829–1834. [Google Scholar] [CrossRef]
- Hasegawa, H.; Yoshimura, T. Application of dual-frequency GPS receivers for static surveying under tree canopies. J. For. Res. 2003, 8, 0103–0110. [Google Scholar] [CrossRef]
- Yoshimura, T.; Hasegawa, H. Comparing the precision and accuracy of GPS positioning in forested areas. J. For. Res. 2003, 8, 147–152. [Google Scholar] [CrossRef]
- Mori, A. Accuracy and efficiency of DGPS inside the forest-the effects of tree stem and crown on accuracy of positioning. Appl. Sci. 2000, 9, 13–17. [Google Scholar]
- Kobayashi, H.; Yada, Y.; Chachin, T.; Okano, K.; Nogami, Y.; Torimoto, H. Evaluation of GPS receivers’ performance inside and outside forests. J. Jpn. For. Soc. 2001, 83, 135–142. [Google Scholar]
- Sawaguchi, I.; Nishida, K.; Shishiuchi, M.; Tatsukawa, S. Positioning precision and sampling number of DGPS under forest canopies. J. For. Res. 2003, 8, 0133–0137. [Google Scholar] [CrossRef]
- Deckert, C.; Bolstad, P.V. Forest canopy, terrain, and distance effects on global positioning system point accuracy. Photogramm. Eng. Remote Sens. 1996, 62, 317–321. [Google Scholar]
- Hansen, M.C.; Riggs, R.A. Accuracy, precision, and observation rates of global positioning system telemetry collars. J. Wildl. Manag. 2008, 72, 518–526. [Google Scholar] [CrossRef]
- Næsset, E. Point accuracy of combined pseudorange and carrier phase differential GPS under forest canopy. Can. J. For. Res. 1999, 29, 547–553. [Google Scholar] [CrossRef]
- Sawaguchi, I.; Saitoh, Y.; Tatsukawa, S. A study of the effects of stems and canopies on the signal to noise ratio of GPS signals. J. For. Res. 2005, 10, 395–401. [Google Scholar] [CrossRef]
- Naesset, E.; Jonmeister, T. Assessing point accuracy of DGPS under forest canopy before data acquisition, in the field and after postprocessing. Scand. J. For. Res. 2002, 17, 351–358. [Google Scholar] [CrossRef]
- Bettinger, P.; Merry, K.; Bayat, M.; Tomaštík, J. GNSS use in forestry–A multi-national survey from Iran, Slovakia and southern USA. Comput. Electron. Agric. 2019, 158, 369–383. [Google Scholar] [CrossRef]
- Dabove, P.; Di Pietra, V. Towards high accuracy GNSS real-time positioning with smartphones. Adv. Space Res. 2019, 63, 94–102. [Google Scholar] [CrossRef]
- Bianchi, S.; Cahalan, C.; Hale, S.; Gibbons, J.M. Rapid assessment of forest canopy and light regime using smartphone hemispherical photography. Ecol. Evol. 2017, 7, 10556–10566. [Google Scholar] [CrossRef]
- Vastaranta, M.; González Latorre, E.; Luoma, V.; Saarinen, N.; Holopainen, M.; Hyyppä, J. Evaluation of a smartphone app for forest sample plot measurements. Forests 2015, 6, 1179–1194. [Google Scholar] [CrossRef]
- Tomaštík, J., Jr.; Tomaštík, J., Sr.; Saloň, Š.; Piroh, R. Horizontal accuracy and applicability of smartphone GNSS positioning in forests. For. Int. J. For. Res. 2017, 90, 187–198. [Google Scholar] [CrossRef]
- Tomaštík, J.; Chudá, J.; Tunák, D.; Chudý, F.; Kardoš, M. Advances in smartphone positioning in forests: Dual-frequency receivers and raw GNSS data. For. Int. J. For. Res. 2021, 94, 292–310. [Google Scholar] [CrossRef]
- Guo, Y. Positioning accuracy evaluation of smart phones in secondary forests of Poplar and Birch with different canopy openness. Hebei Agric. Univ. China 2021, 16, 1–61. [Google Scholar]
- Zhang, Y.; Fang, H.; Ma, L.; Ye, Y.; Wang, Y. Estimation of forest leaf area index and clumping index from the Global Positioning System (GPS) satellite carrier-to-noise-density ratio (C/N0). Remote Sens. Lett. 2020, 11, 146–155. [Google Scholar] [CrossRef]
- Wright, W.; Wilkinson, B.; Cropper, W., Jr. Development of a GPS forest signal absorption coefficient index. Forests 2018, 9, 226. [Google Scholar] [CrossRef]
- Holden, N.; Martin, A.; Owende, P.; Ward, S. A method for relating GPS performance to forest canopy. Int. J. For. Eng. 2001, 12, 51–56. [Google Scholar] [CrossRef]
- Kaartinen, H.; Hyyppä, J.; Vastaranta, M.; Kukko, A.; Jaakkola, A.; Yu, X.; Pyörälä, J.; Liang, X.; Liu, J.; Wang, Y. Accuracy of kinematic positioning using global satellite navigation systems under forest canopies. Forests 2015, 6, 3218–3236. [Google Scholar] [CrossRef]
- Liu, W.; Shi, X.; Zhu, F.; Tao, X.; Wang, F. Quality analysis of multi-GNSS raw observations and a velocity-aided positioning approach based on smartphones. Adv. Space Res. 2019, 63, 2358–2377. [Google Scholar] [CrossRef]
- Bu, J.-W.; Li, X.-L.; Zuo, X.-Q.; Chang, J.; Li, X.-M. Quality comparison and analysis of Beidou/GPS/GLONASS multi system satellite positioning data. Prog. Geophys. 2018, 33, 1–9. [Google Scholar]
- Li, Y.; Liu, L.; Cui, L.; Huang, L.; Zhao, Z.; Huang, X. Effects of canopy openness on positioning availability and initialization time of GNSS RTK in forests. Sci. Silvae Sin. 2014, 50, 78–84. [Google Scholar]
- Wing, M.G.; Eklund, A. Performance comparison of a low-cost mapping grade global positioning systems (GPS) receiver and consumer grade GPS receiver under dense forest canopy. J. For. 2007, 105, 9–14. [Google Scholar]
- Sigrist, P.; Coppin, P.; Hermy, M. Impact of forest canopy on quality and accuracy of GPS measurements. Int. J. Remote Sens. 1999, 20, 3595–3610. [Google Scholar] [CrossRef]
- Szot, T.; Specht, C.; Specht, M.; Dabrowski, P.S. Comparative analysis of positioning accuracy of Samsung Galaxy smartphones in stationary measurements. PLoS ONE 2019, 14, e0215562. [Google Scholar] [CrossRef] [PubMed]
- Pang, L.; Huang, S.; Li, W.; Tang, X. Application of GNSS in forestry sector in China. World For. Res. 2019, 32, 41–46. [Google Scholar]
- Robustelli, U.; Baiocchi, V.; Marconi, L.; Radicioni, F.; Pugliano, G. Precise Point Positioning with Single and Dual-Frequency Multi-GNSS Android Smartphones. In Proceedings of the CEUR Workshop Proceeding, Vienna, Austria, 3–6 November 2020. [Google Scholar]
- Paziewski, J. Recent advances and perspectives for positioning and applications with smartphone GNSS observations. Meas. Sci. Technol. 2020, 31, 091001. [Google Scholar] [CrossRef]
- Aggrey, J.; Bisnath, S.; Naciri, N.; Shinghal, G.; Yang, S. Multi-GNSS precise point positioning with next-generation smartphone measurements. J. Spat. Sci. 2020, 65, 79–98. [Google Scholar] [CrossRef]
- Hong-gan, W.; Peng, L.; Yun-feng, Y.; Ji-hui, X.; Heng, Z. Comparison on Multimodal Positioning Accuracy of Commercial and Professional Receiver in Forest Environment. For. Sci. Res. 2020, 33, 170–176. [Google Scholar]
- Jingxue, B.; Jie, Z.; Ying, G. Accuracy of GPS and A-GPS positioning on Android phone. Bull. Surv. Mapp. 2016, 7, 10. [Google Scholar]
- Van Diggelen, F.S.T. A-Gps: Assisted Gps, Gnss, and Sbas; Artech House: Boston, MA, USA; London, UK, 2009. [Google Scholar]
- Xiaohong, Z.; Xingxing, L.; Pan, L. Review of GNSS PPP and its application. Acta Geod. Cartogr. Sin. 2017, 46, 1399. [Google Scholar]
- Ningsong, H.; Wentao, F.; Shengfeng, G.; Yidong, L. Precise positioning of smartphones and results analysis. Bull. Surv. Mapp. 2020, 1, 5–9. [Google Scholar]
- Liang, W.; Zishen, L.; Kai, Z.; Shaotian, Z.; Hong, Y. Multi-GNSS real-time un-differenced precise positioning for Android smart devices. Navig. Position. Timing 2019, 6, 1–10. [Google Scholar]
- Li, J.; Zheng, Z.; Zhang, D. Research on real-time BDS/GPS single-frequency PPP technology for Android mobile terminal. Sci. Surv. Mapp. 2019, 44, 149–153. [Google Scholar]
- Guo, F.; Wu, W.; Zhang, X.; Liu, W. Realization and Precision Analysis of Real-time Precise Point Positioning with Android Smartphones. J. Wuhan Univ. Inf. Sci. Ed. 2021, 46, 1053–1062. [Google Scholar]
- Lee, T.; Bettinger, P.; Cieszewski, C.J.; Gutierrez Garzon, A.R. The applicability of recreation-grade GNSS receiver (GPS watch, Suunto Ambit Peak 3) in a forested and an open area compared to a mapping-grade receiver (Trimble Juno T41). PLoS ONE 2020, 15, e0231532. [Google Scholar] [CrossRef]
- Drosos, V.C.; Malesios, C. Measuring the accuracy and precision of the Garmin GPS positioning in forested areas: A case study in Taxiarchis-Vrastama University Forest. J. Environ. Sci. Eng. B 2012, 2012, 566–576. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device Model | Time to Market | Operating System | Acceptable Signal Type of Global Navigation Satellite Systems (GNSS) Device | ||||
|---|---|---|---|---|---|---|---|
| GPS | BDS | GLONASS | Galileo | QZSS | |||
| K9 | 2021 | Android 11 | L1 | B1 | L1 | E1 | L1 |
| NEO | 2021 | Android 11 | L1\L5 | B1\B2 | L1 | E1\E5 | L1\L5 |
| P50 | 2021 | Harmony | L1\L5 | B1\B2 | L1 | E1\E5 | L1\L5 |
| G138BD | 2012 | OS2.0 | L1 | B1 | L1 | \ | \ |
| iRTK2 | 2014 | \ | L1\L2\L5 | B1\B2\B3 | L1\L2\L3 | E1\E5a\E5b | L1\L2\L5 |
| K9 | NEO | P50 | IRTK2 | |
|---|---|---|---|---|
| Correlation coefficient | 0.155 | 0.304 | 0.339 | 0.612 |
| Significance | 0.250 | 0.048 | 0.010 | 0.001 |
| Device Mode | Signal Frequency | Canopy Openness | |||
|---|---|---|---|---|---|
| 0.1–0.3 | 0.3–0.5 | 0.5–0.7 | 0.7–0.9 | ||
| K9 | L1 | 29.35 ± 1.88 b | 28.74 ± 1.05 b | 30.46 ± 1.21 a | 30.99 ± 1.56 a |
| NEO | L1 | 26.43 ± 1.25 c | 26.42 ± 0.80 c | 27.70 ± 0.86 b | 28.64 ± 1.26 a |
| L5 | 25.30 ± 1.77 b | 26.15 ± 1.50 b | 25.91 ± 1.72 b | 27.74 ± 1.03 a | |
| P50 | L1 | 28.87 ± 1.27 c | 30.08 ± 1.29 b | 30.56 ± 0.69 b | 31.89 ± 1.16 a |
| L5 | 28.41 ± 1.25 b | 29.11 ± 1.56 b | 29.30 ± 1.71 b | 30.82 ± 1.57 a | |
| iRTK2 | L1 | 41.16 ± 0.85 c | 41.28 ± 0.79 c | 42.25 ± 0.99 b | 43.48 ± 1.56 a |
| L5 | 41.29 ± 1.09 c | 41.68 ± 1.17 c | 42.57 ± 0.78 b | 43.42 ± 1.02 a | |
| Device Mode | K9 | NEO | P50 | iRTK2 | |||
|---|---|---|---|---|---|---|---|
| L1 | L1 | L5 | L1 | L5 | L1 | L5 | |
| Correlation coefficient | 0.492 | 0.641 | 0.363 | 0.625 | 0.392 | 0.601 | 0.591 |
| Significance | 0.001 | 0.001 | 0.006 | 0.001 | 0.003 | 0.001 | 0.001 |
| Error Direction | Device Mode | Canopy Openness | |||
|---|---|---|---|---|---|
| 0.1–0.3 | 0.3–0.5 | 0.5–0.7 | 0.7–0.9 | ||
| East direction (m) | K9 | 8.36 ± 4.38 b | 8.00 ± 3.98 b | 6.70 ± 2.48 b | 4.95 ± 1.80 a |
| NEO | 7.89 ± 3.64 b | 7.02 ± 2.36 b | 5.41 ± 1.49 a | 4.70 ± 2.00 a | |
| P50 | 5.71 ± 1.12 a | 7.83 ± 3.91 b | 5.47 ± 2.17 a | 4.62 ± 1.86 a | |
| G138BD | 3.67 ± 1.82 b | 2.88 ± 1.20 ab | 2.38 ± 0.82 a | 2.18 ± 1.51 a | |
| iRTK2 | 1.35 ± 0.84 b | 1.60 ± 1.06 b | 1.06 ± 0.51 ab | 0.63 ± 0.39 a | |
| North direction (m) | K9 | 7.99 ± 1.91 b | 9.30 ± 4.05 b | 7.61 ± 1.78 b | 5.67 ± 2.13 a |
| NEO | 7.75 ± 2.56 b | 8.42 ± 2.58 b | 7.24 ± 2.65 b | 5.03 ± 2.23 a | |
| P50 | 6.90 ± 2.18 b | 7.72 ± 2.24 b | 6.92 ± 2.61 b | 5.20 ± 2.15 a | |
| G138BD | 2.85 ± 0.81 a | 3.53 ± 0.90 a | 2.85 ± 1.47 a | 3.36 ± 1.55 a | |
| iRTK2 | 1.49 ± 0.49 b | 1.61 ± 0.73 b | 1.52 ± 0.51 b | 0.86 ± 0.54 a | |
| Elevation direction (m) | K9 | 16.72 ± 6.10 ab | 18.19 ± 7.91 b | 14.84 ± 4.65 a | 13.03 ± 5.80 a |
| NEO | 14.42 ± 5.25 a | 16.72 ± 5.99 b | 16.45 ± 4.76 b | 12.99 ± 5.86 a | |
| P50 | 11.67 ± 3.33 a | 16.95 ± 5.44 b | 14.46 ± 4.68 b | 11.18 ± 3.90 a | |
| G138BD | 13.10 ± 1.68 bc | 12.99 ± 2.36 c | 11.26 ± 2.54 b | 9.48 ± 2.31 a | |
| iRTK2 | 3.65 ± 0.83 a | 3.76 ± 1.62 a | 3.45 ± 1.12 a | 2.79 ± 1.56 a | |
| Horizontal direction (m) | K9 | 11.91 ± 3.61 b | 12.35 ± 5.46 b | 10.28 ± 2.50 b | 7.67 ± 2.29 a |
| NEO | 11.10 ± 4.31 b | 11.03 ± 2.17 b | 9.11 ± 2.81 b | 6.96 ± 2.81 a | |
| P50 | 9.03 ± 2.07 ab | 10.51 ± 2.80 b | 9.54 ± 2.73 b | 7.04 ± 2.09 a | |
| G138BD | 4.75 ± 1.66 a | 4.65 ± 1.16 a | 3.89 ± 1.18 a | 4.29 ± 1.42 a | |
| iRTK2 | 2.08 ± 0.78 b | 1.99 ± 0.54 b | 1.85 ± 0.67 b | 0.99 ± 0.48 a | |
| Error Direction | Device Mode | Canopy Openness | |||
|---|---|---|---|---|---|
| 0.1–0.3 | 0.3–0.5 | 0.5–0.7 | 0.7–0.9 | ||
| East direction (m) | K9 | 1.94 ± 1.47 a | 2.45 ± 2.10 a | 2.16 ± 1.85 a | 1.53 ± 1.66 a |
| NEO | 3.48 ± 2.53 b | 2.60 ± 1.73 ab | 3.04 ± 2.17 b | 1.40 ± 1.60 a | |
| P50 | 1.85 ± 1.74 ab | 1.89 ± 1.44 b | 1.07 ± 0.87 a | 1.29 ± 0.78 ab | |
| iRTK2 | 0.80 ± 1.02 a | 0.70 ± 0.54 a | 0.46 ± 0.37 a | 0.40 ± 0.38 a | |
| North direction (m) | K9 | 3.45 ± 1.85 ab | 3.77 ± 3.03 b | 3.36 ± 2.81 ab | 1.69 ± 1.64 a |
| NEO | 2.07 ± 1.30 a | 2.92 ± 2.18 a | 3.16 ± 2.38 a | 1.73 ± 1.41 a | |
| P50 | 2.86 ± 2.16 b | 1.79 ± 0.97 ab | 1.48 ± 1.37 a | 2.17 ± 1.61 ab | |
| iRTK2 | 0.87 ± 0.46 a | 0.84 ± 0.85 a | 0.82 ± 0.45 a | 0.59 ± 0.53 a | |
| Elevation direction (m) | K9 | 4.43 ± 3.52 a | 4.10 ± 4.24 a | 4.84 ± 4.55 a | 2.51 ± 3.54 a |
| NEO | 3.02 ± 1.93 a | 3.77 ± 2.53 a | 3.75 ± 2.55 a | 3.94 ± 2.22 a | |
| P50 | 1.59 ± 0.89 b | 4.62 ± 2.55 a | 4.67 ± 3.27 a | 4.16 ± 3.42 ab | |
| iRTK2 | 1.23 ± 1.07 a | 1.74 ± 1.38 a | 1.90 ± 1.52 a | 2.27 ± 1.78 a | |
| Horizontal direction (m) | K9 | 4.10 ± 2.04 ab | 4.66 ± 3.45 b | 4.50 ± 2.58 b | 2.69 ± 1.80 a |
| NEO | 4.24 ± 2.48 b | 4.23 ± 2.22 b | 4.61 ± 2.84 b | 2.43 ± 1.88 a | |
| P50 | 3.96 ± 1.67 b | 2.82 ± 1.33 ab | 2.01 ± 1.37 a | 2.69 ± 1.50 ab | |
| iRTK2 | 1.35 ± 0.85 b | 1.25 ± 0.80 b | 1.01 ± 0.44 ab | 0.75 ± 0.60 a | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, J.; Guo, Y.; Li, X.; Zhang, N.; Jiang, J.; Wang, G. Evaluation of Positioning Accuracy of Smartphones under Different Canopy Openness. Forests 2022, 13, 1591. https://doi.org/10.3390/f13101591
Huang J, Guo Y, Li X, Zhang N, Jiang J, Wang G. Evaluation of Positioning Accuracy of Smartphones under Different Canopy Openness. Forests. 2022; 13(10):1591. https://doi.org/10.3390/f13101591
Chicago/Turabian StyleHuang, Jiefan, Yingyu Guo, Xuan Li, Ning Zhang, Jiang Jiang, and Guangyu Wang. 2022. "Evaluation of Positioning Accuracy of Smartphones under Different Canopy Openness" Forests 13, no. 10: 1591. https://doi.org/10.3390/f13101591
APA StyleHuang, J., Guo, Y., Li, X., Zhang, N., Jiang, J., & Wang, G. (2022). Evaluation of Positioning Accuracy of Smartphones under Different Canopy Openness. Forests, 13(10), 1591. https://doi.org/10.3390/f13101591